Retrieval of Forest Structural Parameters from Terrestrial Laser Scanning: A Romanian Case Study

 ,
,
Abstract
1. Introduction
2. Materials and Methods
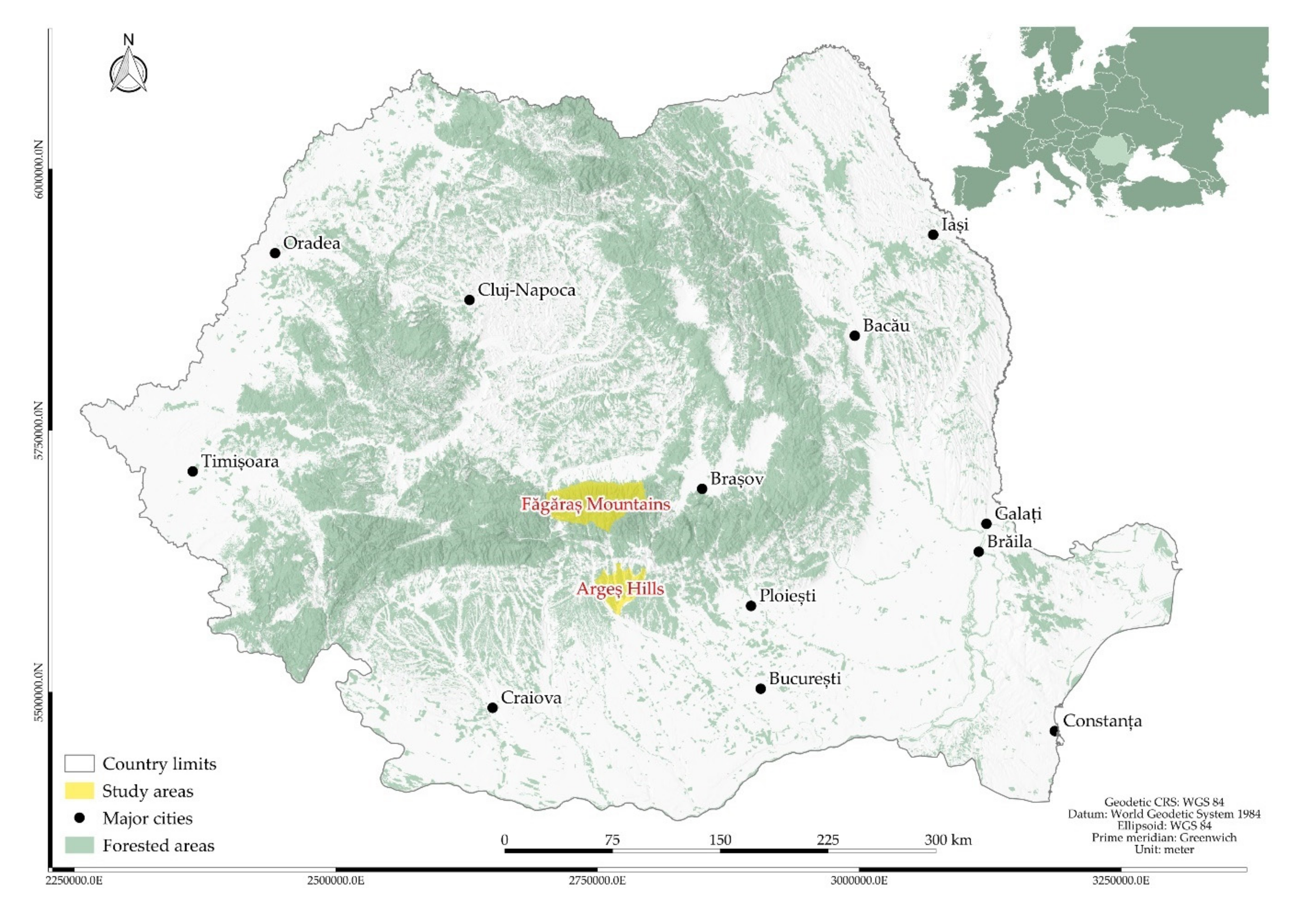
2.1. Study Area
2.2. Field Data Collection
2.2.1. Reference Measurements
2.2.2. Single terrestrial laser scan
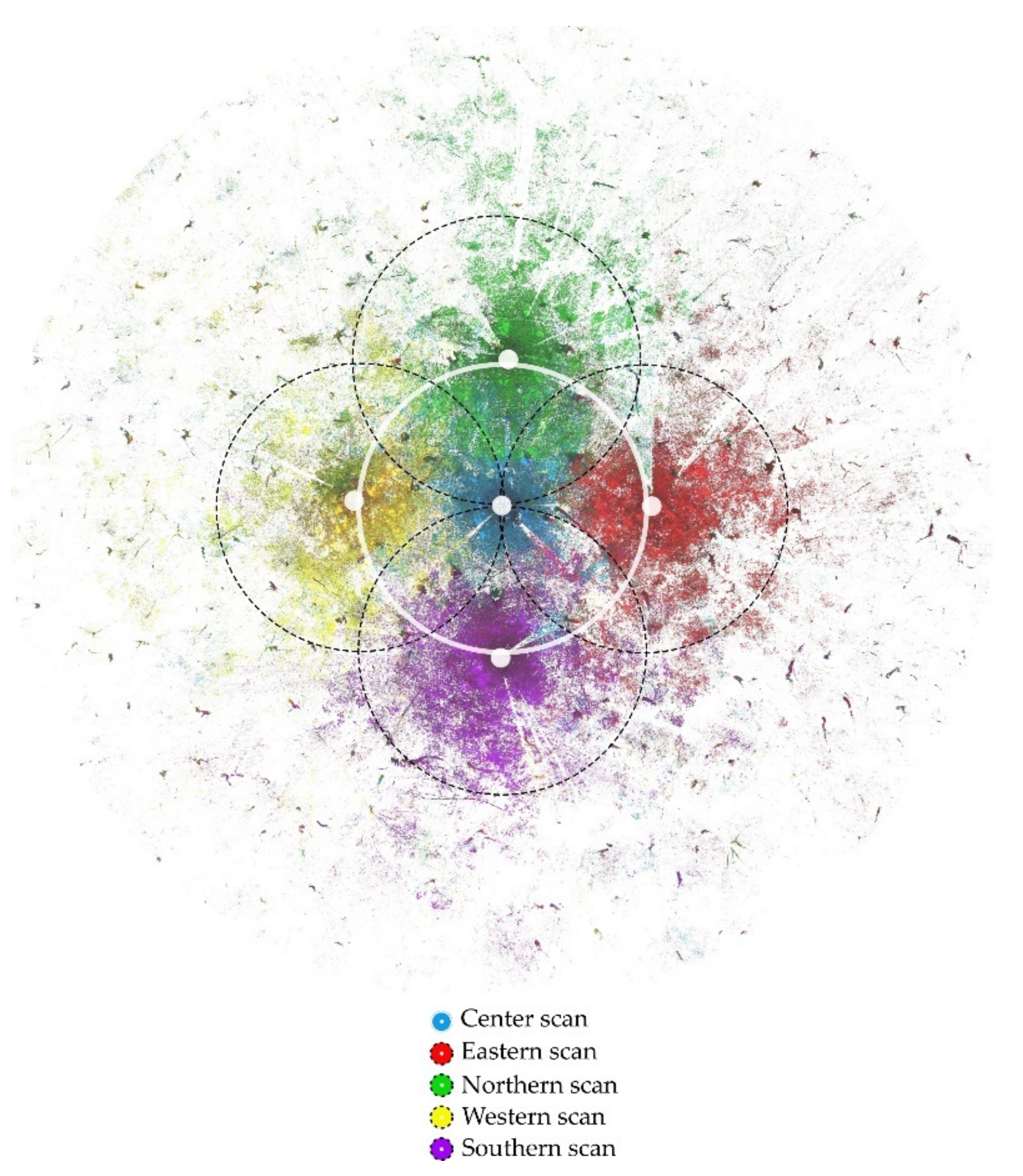
2.2.3. Multiple Terrestrial Laser Scans
2.3. Terrestrial Laser Scans Pre-Processing
2.4. Terrestrial Laser Scans Processing
3. Results
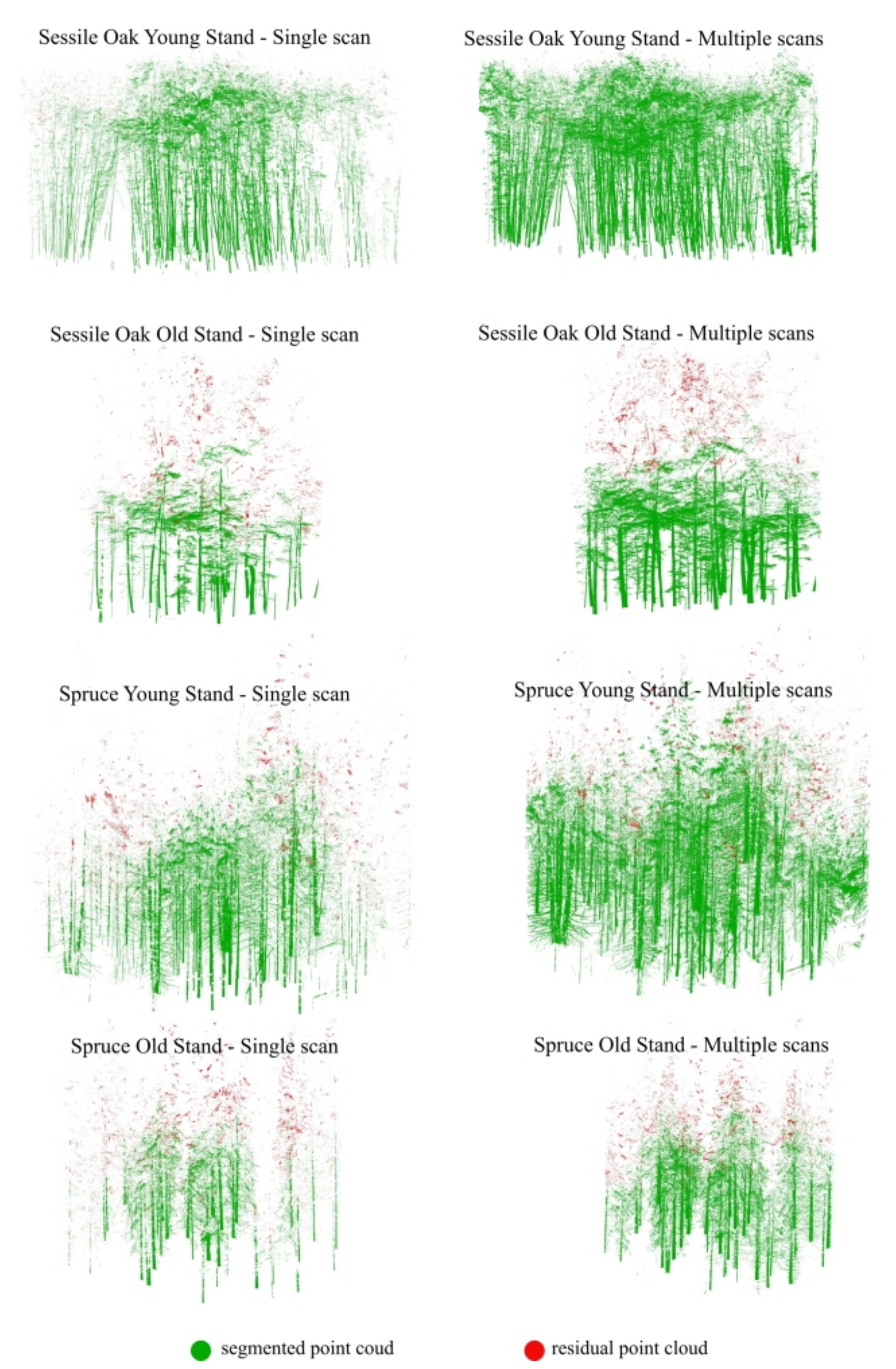
3.1. Individual Tree Segmentation
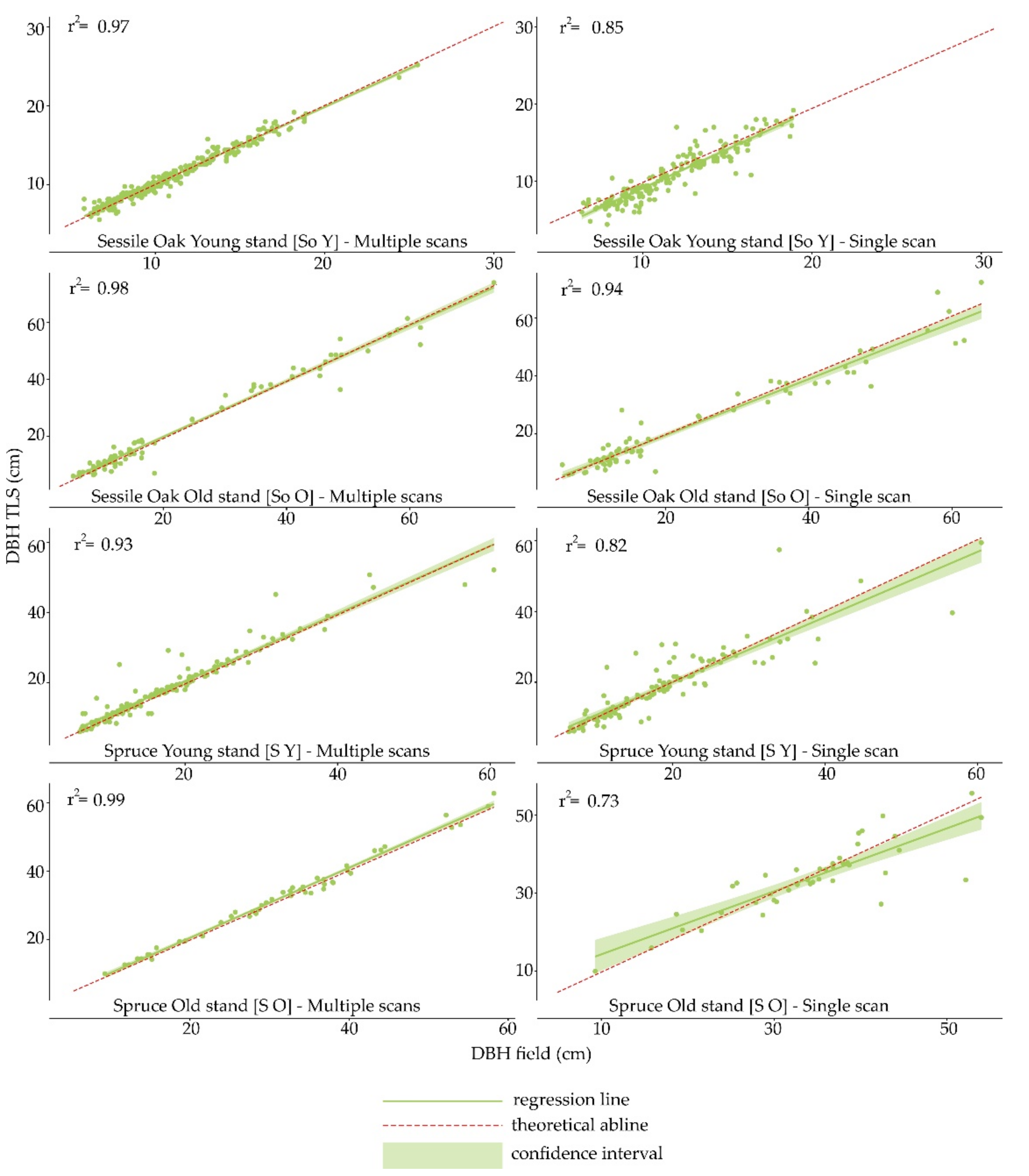
3.2. DBH Estimation
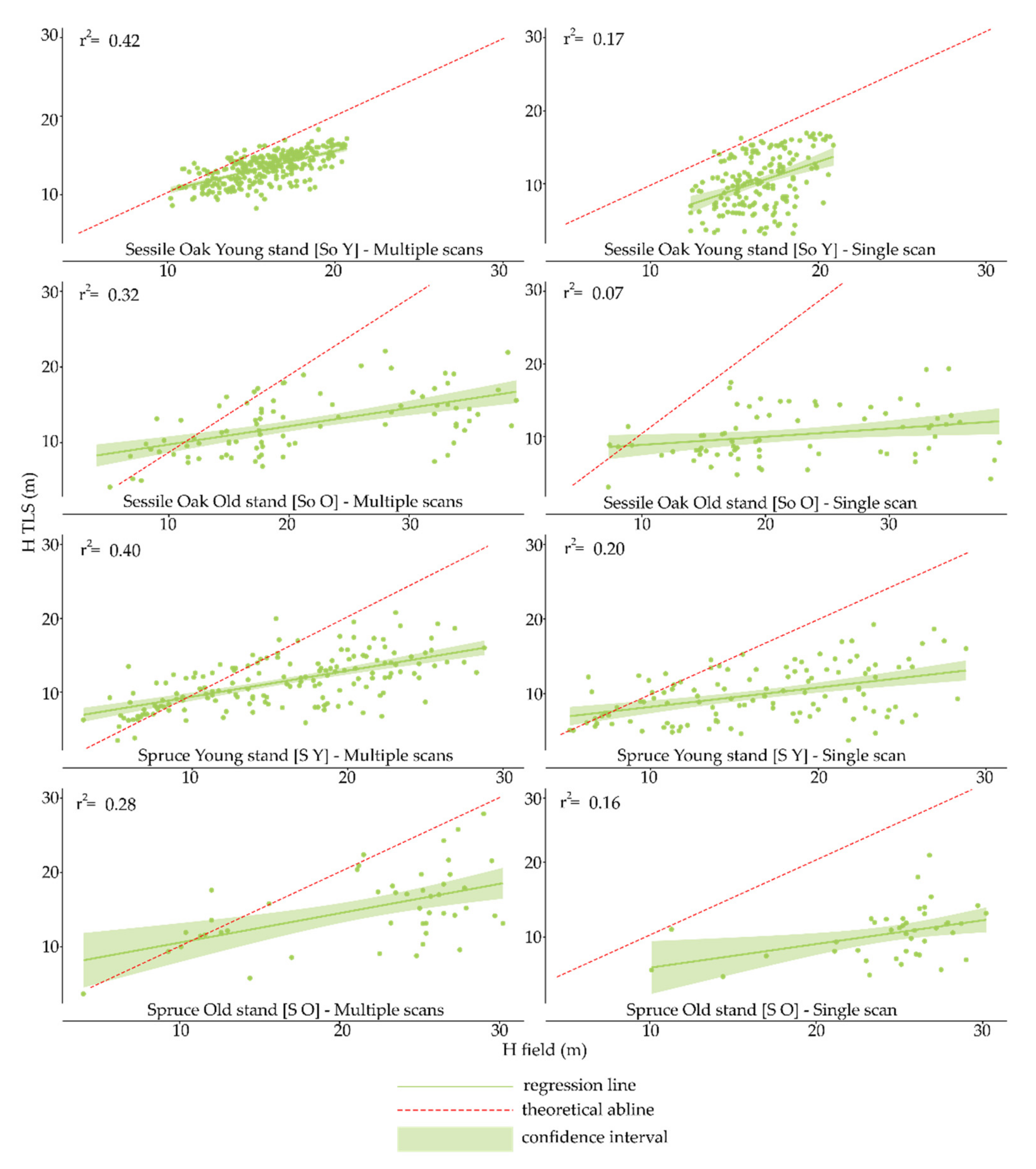
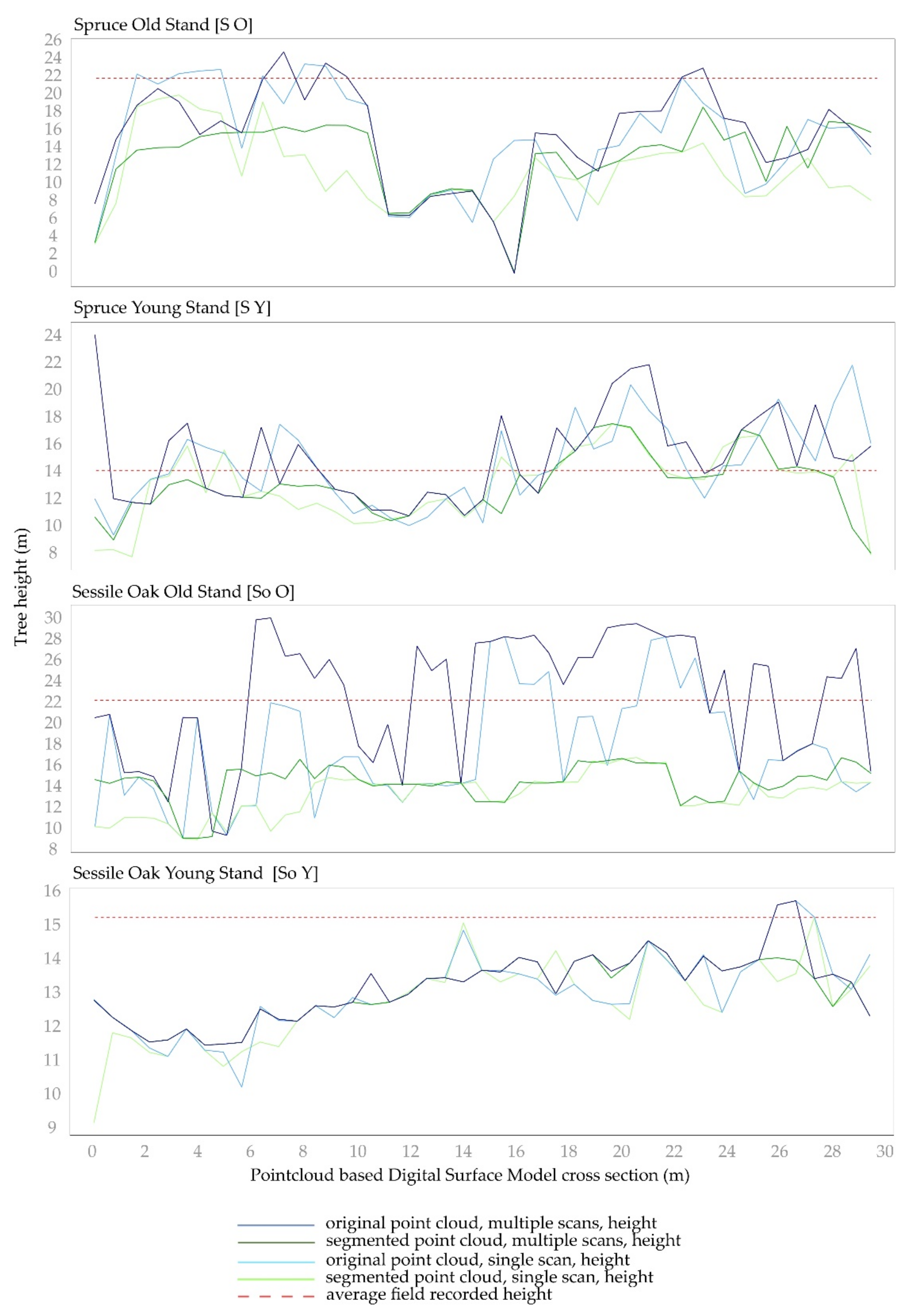
3.3. Height Estimation
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bournez, E.; Landes, T.; Saudreau, M.; Kastendeuch, P.; Najjar, G. From TLS point clouds to 3D models of trees: A comparison of existing algorithms for 3D tree reconstruction. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences-ISPRS Archives, Nafplio, Grecce, 1–3 March 2017. [Google Scholar]
- Raumonen, P.; Casella, E.; Calders, K.; Murphy, S.; Åkerblom, M.; Kaasalainen, M. Massive-scale tree modelling from TLS data. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Munich, Germany, 25–27 March 2015. [Google Scholar]
- Huang, H.; Tang, L.; Chen, C. A 3D individual tree modeling technique based on terrestrial LiDAR point cloud data. In Proceedings of the 2015 2nd IEEE International Conference on Spatial Data Mining and Geographical Knowledge Services (ICSDM 2015), Fuzhou, China, 8–10 July 2015. [Google Scholar]
- Pascu, I.-S.; Dobre, A.-C.; Badea, O.; Tănase, M.A. Estimating forest stand structure attributes from terrestrial laser scans. Sci. Total Environ. 2019, 691, 205–215. [Google Scholar] [CrossRef]
- Danson, F.M.; Hetherington, D.; Morsdorf, F.; Koetz, B.; Allgöwer, B. Forest canopy gap fraction from terrestrial laser scanning. IEEE Geosci. Remote Sens. Lett. 2007, 4, 157–160. [Google Scholar] [CrossRef]
- Newnham, G.; Armston, J.; Muir, J. Evaluation of Terrestrial Laser Scanners for Measuring Vegetation Structure. CSIRO Sustain. Agric. Flagship 2012, EP124571. [Google Scholar]
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. SimpleTree—An efficient open source tool to build tree models from TLS clouds. Forests 2015, 6, 4245–4294. [Google Scholar] [CrossRef]
- Hosoi, F.; Omasa, K. Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning lidar. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3610–3618. [Google Scholar] [CrossRef]
- Othmani, A.; Lew Yan Voon, L.F.C.; Stolz, C.; Piboule, A. Single tree species classification from Terrestrial Laser Scanning data for forest inventory. Pattern Recognit. Lett. 2013, 34, 2144–2150. [Google Scholar] [CrossRef]
- Trochta, J.; Kruček, M.; Vrška, T.; Kraâl, K. 3D Forest: An application for descriptions of three-dimensional forest structures using terrestrial LiDAR. PLoS ONE 2017, E0176871. [Google Scholar] [CrossRef]
- Saarinen, N.; Kankare, V.; Vastaranta, M.; Luoma, V.; Pyörälä, J.; Tanhuanpää, T.; Liang, X.; Kaartinen, H.; Kukko, A.; Jaakkola, A.; et al. Feasibility of Terrestrial laser scanning for collecting stem volume information from single trees. ISPRS J. Photogramm. Remote Sens. 2017, 123, 140–158. [Google Scholar] [CrossRef]
- Delagrange, S.; Rochon, P. Reconstruction and analysis of a deciduous sapling using digital photographs or terrestrial-LiDAR technology. Ann. Bot. 2011, 108, 991–1000. [Google Scholar] [CrossRef]
- Henning, J.G.; Radtke, P.J. Detailed stem measurements of standing trees from ground-based scanning lidar. For. Sci. 2006, 52, 67–80. [Google Scholar]
- Liu, G.; Wang, J.; Dong, P.; Chen, Y.; Liu, Z. Estimating Individual Tree Height and Diameter at Breast Height (DBH) from Terrestrial Laser Scanning (TLS) Data at Plot Level. Forests 2018, 9, 398. [Google Scholar] [CrossRef]
- Xi, Z.; Hopkinson, C.; Chasmer, L. Automating plot-level stem analysis from terrestrial laser scanning. Forests 2016, 7, 252. [Google Scholar] [CrossRef]
- Heinzel, J.; Huber, M.O. Constrained spectral clustering of individual trees in dense forest using terrestrial laser scanning data. Remote Sens. 2018, 10, 1056. [Google Scholar] [CrossRef]
- Reddy, R.S.; Rakesh; Jha, C.S.; Rajan, K.S. Automatic estimation of tree stem attributes using terrestrial laser scanning in central Indian dry deciduous forests. Curr. Sci. 2018, 114, 201–206. [Google Scholar] [CrossRef]
- Reddy, R.S.; Jha, C.S.; Rajan, K.S. Automatic Tree Identification and Diameter Estimation Using Single Scan Terrestrial Laser Scanner Data in Central Indian Forests. J. Indian Soc. Remote Sens. 2018, 46, 937–943. [Google Scholar] [CrossRef]
- Pitkänen, T.P.; Raumonen, P.; Kangas, A. Measuring stem diameters with TLS in boreal forests by complementary fitting procedure. ISPRS J. Photogramm. Remote Sens. 2019, 147, 294–306. [Google Scholar] [CrossRef]
- Ravaglia, J.; Fournier, R.A.; Bac, A.; Véga, C.; Côté, J.F.; Piboule, A.; Rémillard, U. Comparison of three algorithms to estimate tree stem diameter from terrestrial laser scanner data. Forests 2019, 10, 599. [Google Scholar] [CrossRef]
- Cabo, C.; Ordóñez, C.; López-Sánchez, C.A.; Armesto, J. Automatic dendrometry: Tree detection, tree height and diameter estimation using terrestrial laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 164–174. [Google Scholar] [CrossRef]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is field-measured tree height as reliable as believed—A comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Yrttimaa, T.; Saarinen, N.; Kankare, V.; Liang, X.; Hyyppä, J.; Holopainen, M.; Vastaranta, M. Investigating the Feasibility of Multi-Scan Terrestrial Laser Scanning to Characterize Tree Communities in Southern Boreal Forests. Remote Sens. 2019, 11, 1423. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Wassermann, C.; Nothdurft, A. Influence of Scanner Position and Plot Size on the Accuracy of Tree Detection and Diameter Estimation Using Terrestrial Laser Scanning on Forest Inventory Plots. Remote Sens. 2019, 11, 1602. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 11, 1423. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Decuyper, M.; Mulatu, K.A.; Brede, B.; Calders, K.; Armston, J.; Rozendaal, D.M.A.; Mora, B.; Clevers, J.G.P.W.; Kooistra, L.; Herold, M.; et al. Assessing the structural differences between tropical forest types using Terrestrial Laser Scanning. For. Ecol. Manage. 2018, 429, 327–335. [Google Scholar] [CrossRef]
- Wilkes, P.; Lau, A.; Disney, M.; Calders, K.; Burt, A.; Gonzalez de Tanago, J.; Bartholomeus, H.; Brede, B.; Herold, M. Data acquisition considerations for Terrestrial Laser Scanning of forest plots. Remote Sens. Environ. 2017, 196, 140–153. [Google Scholar] [CrossRef]
- Disney, M. Terrestrial LiDAR: A three-dimensional revolution in how we look at trees. New Phytol. 2019. [Google Scholar] [CrossRef]
- CloudCompare 2018. Available online: https://www.danielgm.net/cc/ (accessed on 5 February 2020).
- Isenburg Martin LAStools efficient LiDAR proccessing software 2014. Available online: https://github.com/LAStools (accessed on 5 February 2020).
- Král, K.; Krůček, M.; Trochta, J. 3D Forest 2018. Available online: https://www.3dforest.eu/ (accessed on 5 February 2020).
- Krebs, M.; Piboule, A. Computree 2018. Available online: http://computree.onf.fr/ (accessed on 5 February 2020).
- Willow Garage PCL-Point cloud library 2018. Available online: http://www.willowgarage.com/pages/software/pcl/ (accessed on 5 February 2020).
- FARO Technologies Inc. FARO SCENE 2018. Available online: https://www.faro.com/ (accessed on 5 February 2020).
- R Core Team R: A language and environment for statistical computing. 2013. Available online: https://www.r-project.org/ (accessed on 5 February 2020).
- QGIS Development Team (2018) Quantum GIS 2018. Available online: https://qgis.org/en/site/ (accessed on 5 February 2020).
- IFER-Monitoring and mapping solutions Ltd. FieldMap 2016. Available online: https://www.fieldmap.cz/ (accessed on 5 February 2020).
- Wang, Y.; Shi, H.; Zhang, Y.; Zhang, D. Automatic registration of laser point cloud using precisely located sphere targets. J. Appl. Remote Sens. 2014, 8, 083588. [Google Scholar] [CrossRef]
- Othmani, A.; Piboule, A.; Krebs, M.; Stolz, C. Towards automated and operational forest inventories with T-Lidar. In Proceedings of the 11th International Conference on LiDAR Applications for Assessing Forest Ecosystems (SilviLaser 2011), Hobart, Australia, 16–19 October 2011. ffhal-00646403. [Google Scholar]
- Bitterlich, W. Klassische und Praktische Relaskopstichprobe. Allg. Forstzeitung 1978, 8. [Google Scholar]
- Romain, J. Airborne LiDAR data manipulation and visualization for forestry application.
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.; Beetz, M. Towards 3D Point cloud based object maps for household environments. Rob. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]
- Piboule, A.; Krebs, M.; Esclatine, L.; Hervé, J.-C. Computree: A collaborative platform for use of terrestrial lidar in dendrometry. In Proceedings of the International IUFRO Conference MeMoWood, Nancy, France, 1–4 October 2013. [Google Scholar]
- Martins Neto, R.P.; Buck, A.L.B.; Silva, M.N.; Lingnau, C.; Machado, Á.M.L.; Pesck, V.A. Avaliação da varredura laser terrestre em diferentes distâncias da árvore para mensurar variáveis dendrométricas. Bol. Ciencias Geod. 2013, 19, 420–433. [Google Scholar] [CrossRef][Green Version]
- Danson, F.M.; Gaulton, R.; Armitage, R.P.; Disney, M.; Gunawan, O.; Lewis, P.; Pearson, G.; Ramirez, A.F. Developing a dual-wavelength full-waveform terrestrial laser scanner to characterize forest canopy structure. Agric. For. Meteorol. 2014, 198–199. [Google Scholar] [CrossRef]
- Chaudhuri, D. A simple least squares method for fitting of ellipses and circles depends on border points of a two-tone image and their 3-D extensions. Pattern Recognit. Lett. 2010, 31, 818–829. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J. Automatic stem mapping by merging several terrestrial laser scans at the feature and decision levels. Sensors (Switzerland) 2013, 50, 661–670. [Google Scholar]
- Fleck, S.; Mölder, I.; Jacob, M.; Gebauer, T.; Jungkunst, H.F.; Leuschner, C. Comparison of conventional eight-point crown projections with LIDAR-based virtual crown projections in a temperate old-growth forest. Ann. For. Sci. 2011, 68, 1173–1185. [Google Scholar] [CrossRef]
- Oveland, I.; Hauglin, M.; Giannetti, F.; Kjørsvik, N.S.; Gobakken, T. Comparing three different ground based laser scanning methods for tree stem detection. Remote Sens. 2018, 10, 538. [Google Scholar] [CrossRef]
- Bienert, A.; Georgi, L.; Kunz, M.; Maas, H.G.; von Oheimb, G. Comparison and combination of mobile and terrestrial laser scanning for natural forest inventories. Forests 2018, 9, 395. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest District | Location [WGS84] | DBH.m. [cm]1 | No. Replicates2 | Stdev3 | H.m. [m]4 | No. Replicates5 | Stdev3 | Species | Age [years] | Ρ6 |
|---|---|---|---|---|---|---|---|---|---|---|
| Mihăești | 45°06′32.6”N 25°00′42.9”E | 10 | 2 | 3.4 | 13 | 3 | 2.6 | SoY7 | 50 | 1 |
| 52 | 2 | 16.1 | 26 | 3 | 8.7 | SoO8 | 190 | 1 | ||
| Mușătești | 45°25′19.7”N 24°41′14.4”E | 22 | 2 | 9.1 | 20 | 3 | 6.2 | SY9 | 50 | 1 |
| 40 | 2 | 12.6 | 27 | 3 | 6.8 | SO10 | 150 | 1 |
| ID | Min.Con.1 | Max.D. Error [m]2 | Max.Hz. Error [m]3 | Max.V. Error [m]4 |
|---|---|---|---|---|
| SoY 15 | 4 | 0.0073 | 0.0071 | 0.0039 |
| SoY 25 | 4 | 0.0078 | 0.0077 | 0.0055 |
| SoY 35 | 4 | 0.0072 | 0.0071 | 0.0016 |
| SoO 16 | 4 | 0.0184 | 0.0175 | 0.0058 |
| SoO 25 | 4 | 0.0082 | 0.0080 | 0.0030 |
| SoO 35 | 4 | 0.0101 | 0.0100 | 0.0040 |
| SY 17 | 4 | 0.0069 | 0.0069 | 0.0058 |
| SY 27 | 4 | 0.0136 | 0.0075 | 0.0113 |
| SY 37 | 4 | 0.0068 | 0.0067 | 0.0030 |
| SO 18 | 4 | 0.0051 | 0.0051 | 0.0038 |
| SO 28 | 4 | 0.0053 | 0.0037 | 0.0052 |
| SO 38 | 4 | 0.0038 | 0.0031 | 0.0023 |
| mean | 4 | 0.0084 | 0.0075 | 0.0046 |
| ID | S.1 | M.2 | F.M.3 | %M.4 | %S.5 | %Inc.6 |
|---|---|---|---|---|---|---|
| SoO 1 | 26 | 31 | 36 | 86 | 72 | 13.89 |
| SoO 2 | 25 | 34 | 45 | 76 | 56 | 20.00 |
| SoO 3 | 21 | 31 | 48 | 65 | 44 | 20.83 |
| SO 1 | 17 | 20 | 31 | 65 | 55 | 09.68 |
| SO 2 | 10 | 15 | 28 | 54 | 36 | 17.86 |
| SO 3 | 12 | 14 | 20 | 70 | 60 | 10.00 |
| SoY 1 | 63 | 110 | 135 | 81 | 47 | 34.81 |
| SoY 2 | 47 | 95 | 130 | 73 | 36 | 36.92 |
| SoY 3 | 65 | 93 | 114 | 82 | 57 | 24.56 |
| SY 1 | 46 | 60 | 92 | 65 | 50 | 15.22 |
| SY 2 | 41 | 74 | 106 | 70 | 39 | 31.13 |
| SY 3 | 30 | 30 | 87 | 34 | 34 | 00.00 |
| ID | S.1 | M.2 | F.M.3 | ΔFM-S4 | ΔFM-M5 |
|---|---|---|---|---|---|
| SoO 1 | 26.9 | 26.0 | 25.6 | −1.3 | −0.4 |
| SoO 2 | 19.4 | 19.9 | 19.4 | 0.0 | −0.5 |
| SoO 3 | 10.9 | 20.1 | 20.0 | 9.1 | −0.1 |
| SO 1 | 34.2 | 31.5 | 30.8 | −3.4 | −0.7 |
| SO 2 | 30.6 | 32.7 | 32 | 1.4 | −0.7 |
| SO 3 | 35.6 | 32.5 | 31.5 | −4.1 | −1.0 |
| SoY 1 | 10.7 | 11.3 | 11.1 | 0.4 | −0.2 |
| SoY 2 | 10.4 | 10.5 | 10.4 | 0.0 | −0.1 |
| SoY 3 | 11.1 | 11.7 | 11.6 | 0.5 | −0.1 |
| SY 1 | 16.8 | 17.4 | 16.4 | −0.4 | −1.0 |
| SY 2 | 17.5 | 16.7 | 16.5 | −1.0 | −0.2 |
| SY 3 | 22.9 | 21.1 | 20.8 | −2.1 | −0.3 |
| Mean [m] | Min. [m] | Max. [m] | St.Dev. | ΔMean [m] | ΔMin. [m] | ΔMax. [m] | ||
|---|---|---|---|---|---|---|---|---|
| segmented | 13.3 | 8.6 | 17.6 | 1.3 | 1.9 | 1.7 | 2.7 | |
| SoY 1 | original | 13.6 | 10.1 | 17.6 | 1.3 | 1.6 | 0.2 | 2.7 |
| field | 15.2 | 10.3 | 20.3 | 1.8 | ||||
| segmented | 15.3 | 8.3 | 20.6 | 2.2 | 7.1 | −1.5 | 18.2 | |
| SoO 1 | original | 23.0 | 8.4 | 32.3 | 5.9 | −0.6 | −1.6 | 6.6 |
| field | 22.4 | 6.8 | 38.9 | 10.4 | ||||
| segmented | 11.4 | 3.4 | 18.4 | 2.6 | 2.9 | 1.9 | 10.4 | |
| SY 1 | original | 13.9 | 3.4 | 26.6 | 3.9 | 0.4 | 1.9 | 2.2 |
| field | 14.3 | 5.3 | 28.8 | 6.2 | ||||
| segmented | 13 | 3.0 | 20.2 | 3.6 | 9.0 | 6.3 | 9.3 | |
| SO 1 | original | 17.3 | 4.6 | 29.8 | 5.3 | 4.7 | 4.7 | −0.3 |
| field | 22 | 9.3 | 29.5 | 6.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pascu, I.-S.; Dobre, A.-C.; Badea, O.; Tanase, M.A. Retrieval of Forest Structural Parameters from Terrestrial Laser Scanning: A Romanian Case Study. Forests 2020, 11, 392. https://doi.org/10.3390/f11040392
Pascu I-S, Dobre A-C, Badea O, Tanase MA. Retrieval of Forest Structural Parameters from Terrestrial Laser Scanning: A Romanian Case Study. Forests. 2020; 11(4):392. https://doi.org/10.3390/f11040392
Chicago/Turabian StylePascu, Ionuț-Silviu, Alexandru-Claudiu Dobre, Ovidiu Badea, and Mihai Andrei Tanase. 2020. "Retrieval of Forest Structural Parameters from Terrestrial Laser Scanning: A Romanian Case Study" Forests 11, no. 4: 392. https://doi.org/10.3390/f11040392
APA StylePascu, I.-S., Dobre, A.-C., Badea, O., & Tanase, M. A. (2020). Retrieval of Forest Structural Parameters from Terrestrial Laser Scanning: A Romanian Case Study. Forests, 11(4), 392. https://doi.org/10.3390/f11040392