Multi-Sensor Prediction of Stand Volume by a Hybrid Model of Support Vector Machine for Regression Kriging





Abstract
1. Introduction
2. Materials and Methods
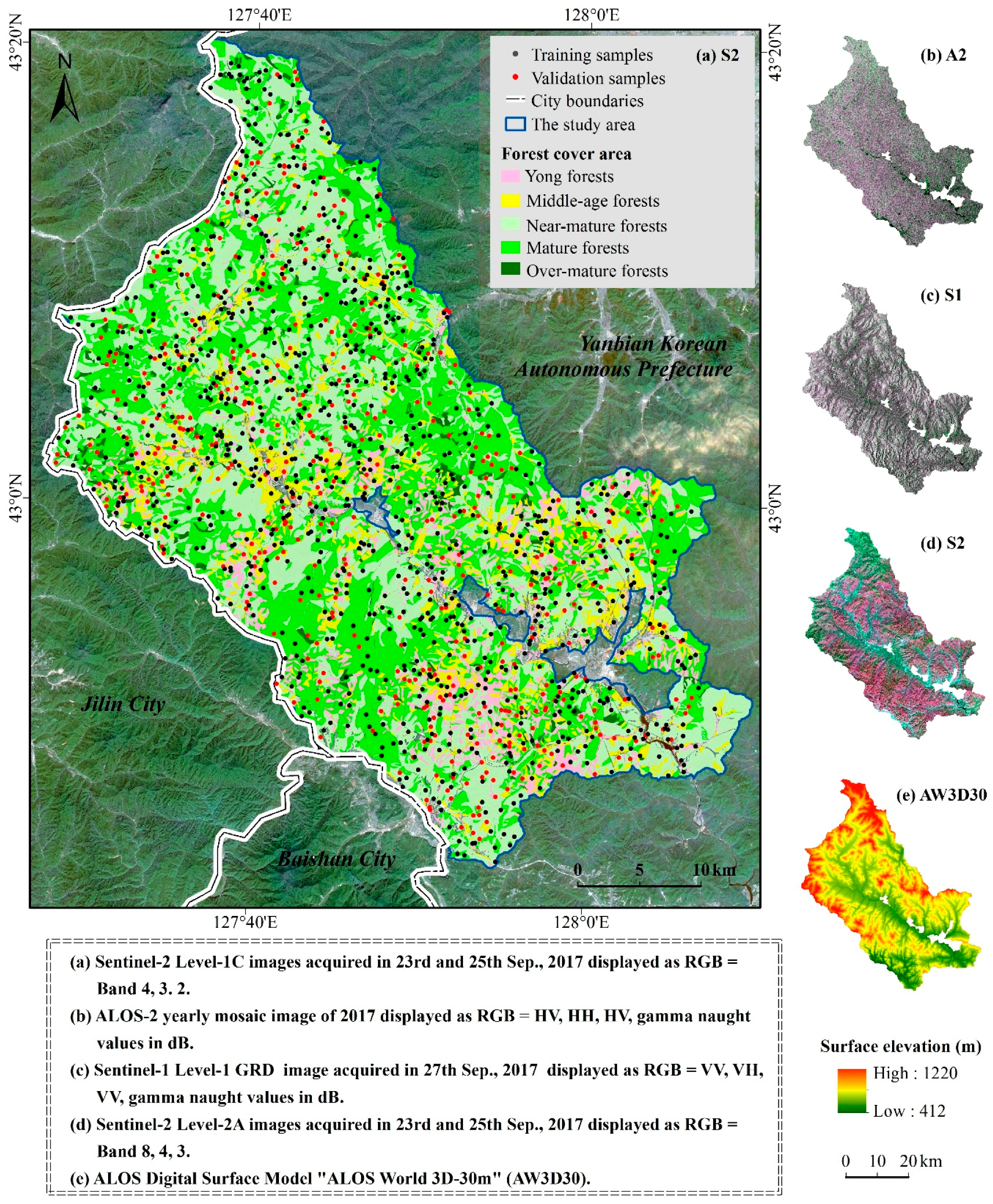
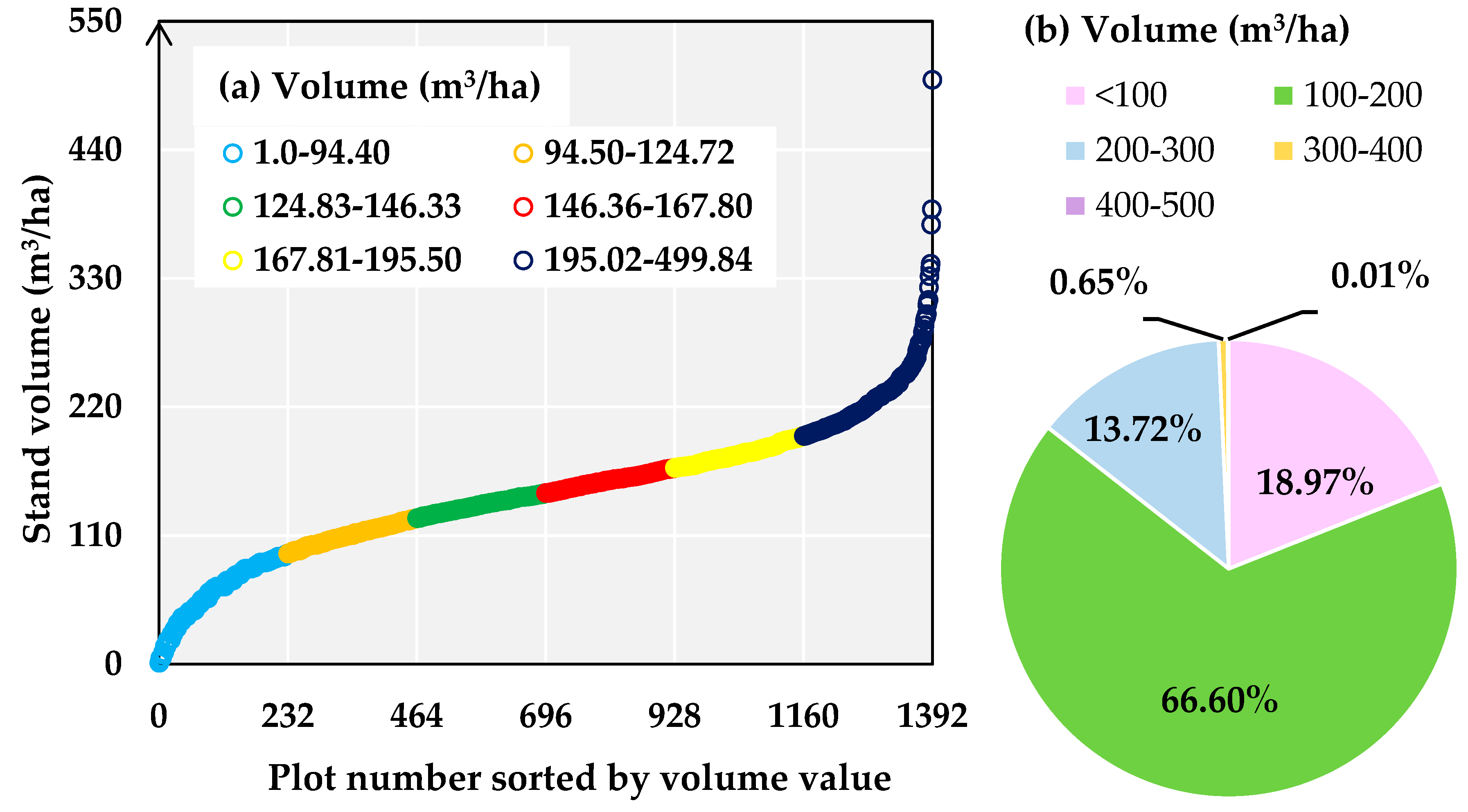
2.1. Study Area and Field-Measured Stand Volume
2.2. Satellite Data Pre-Processing and Derived Variables
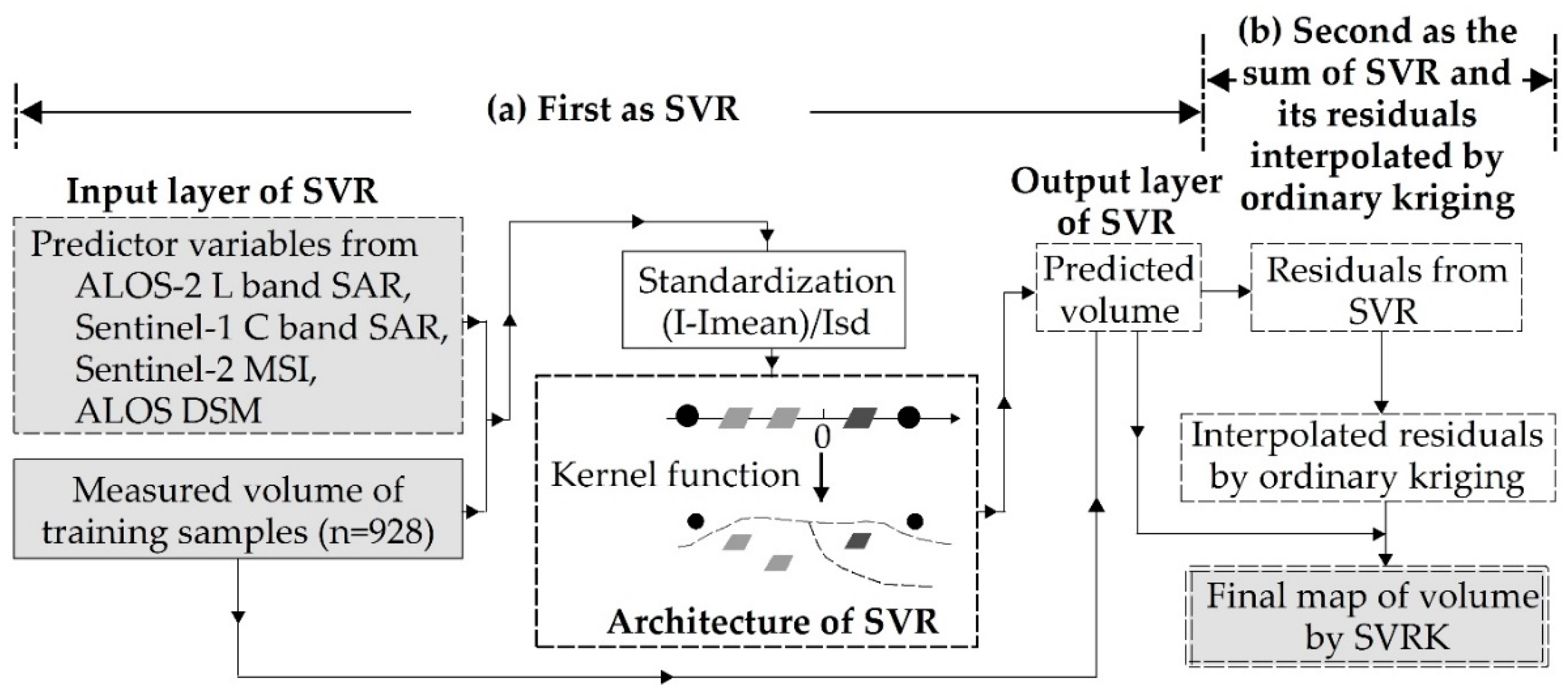
2.3. Support Vector Machine for Regression Kriging (SVRK) and Modeling Evaluation
3. Results
3.1. Relationship between Field-Measured Volume and Remote Sensing Variables
3.2. Modeling Forest Volume by SVRK
3.2.1. Support Vector Machine for Regression (SVR) Modeling for Volume Mapping
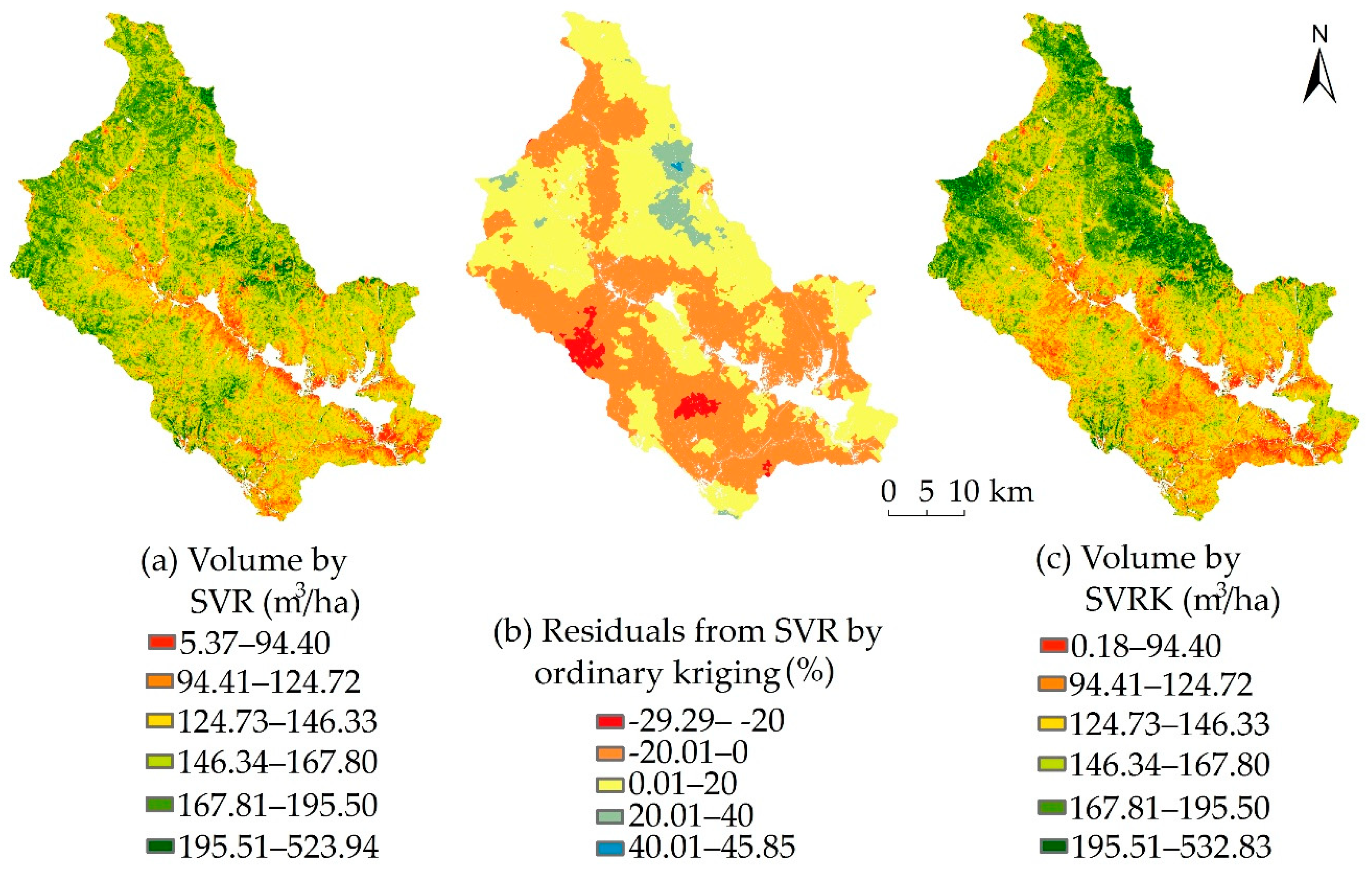
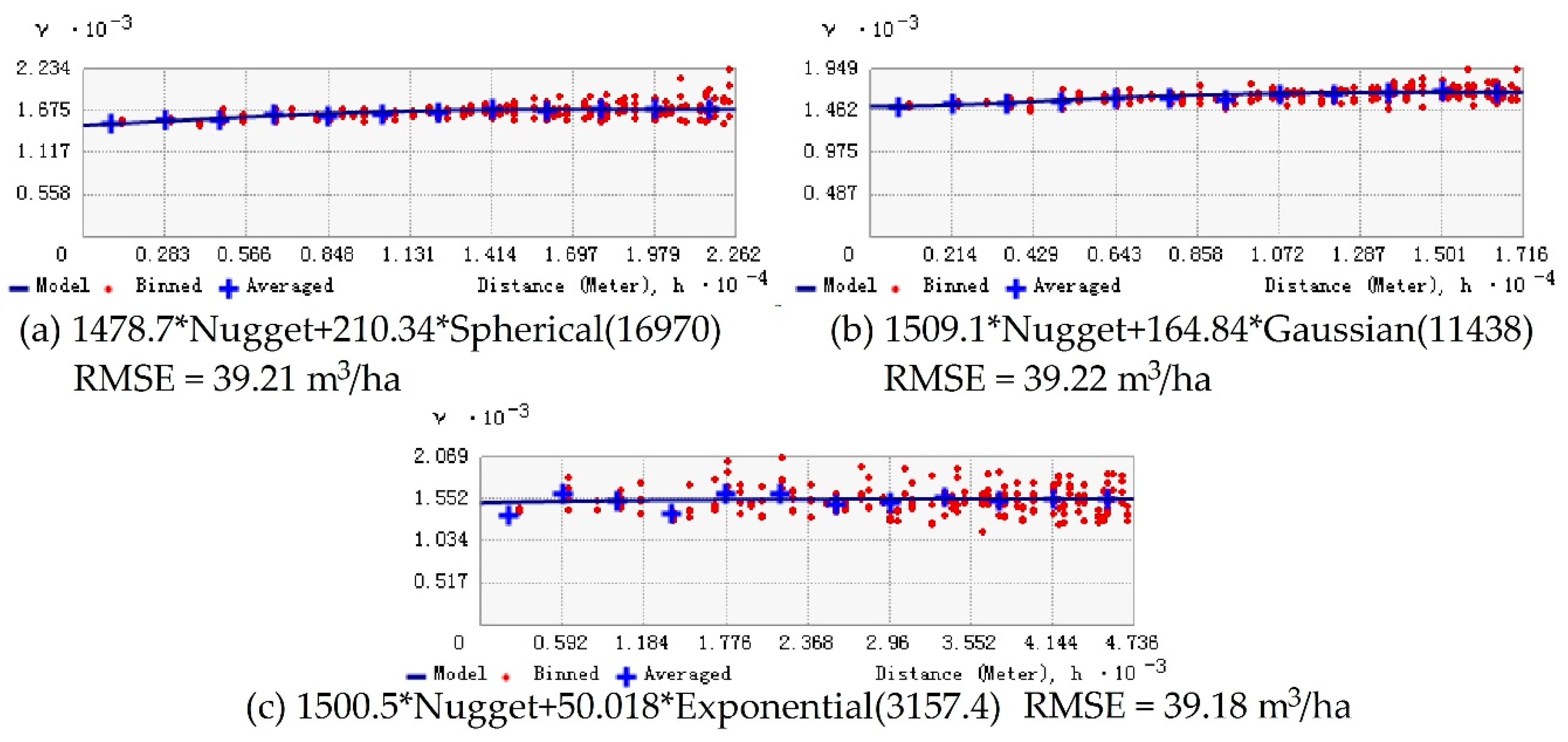
3.2.2. Integration of SVR Prediction and its Residuals by Ordinary Kriging
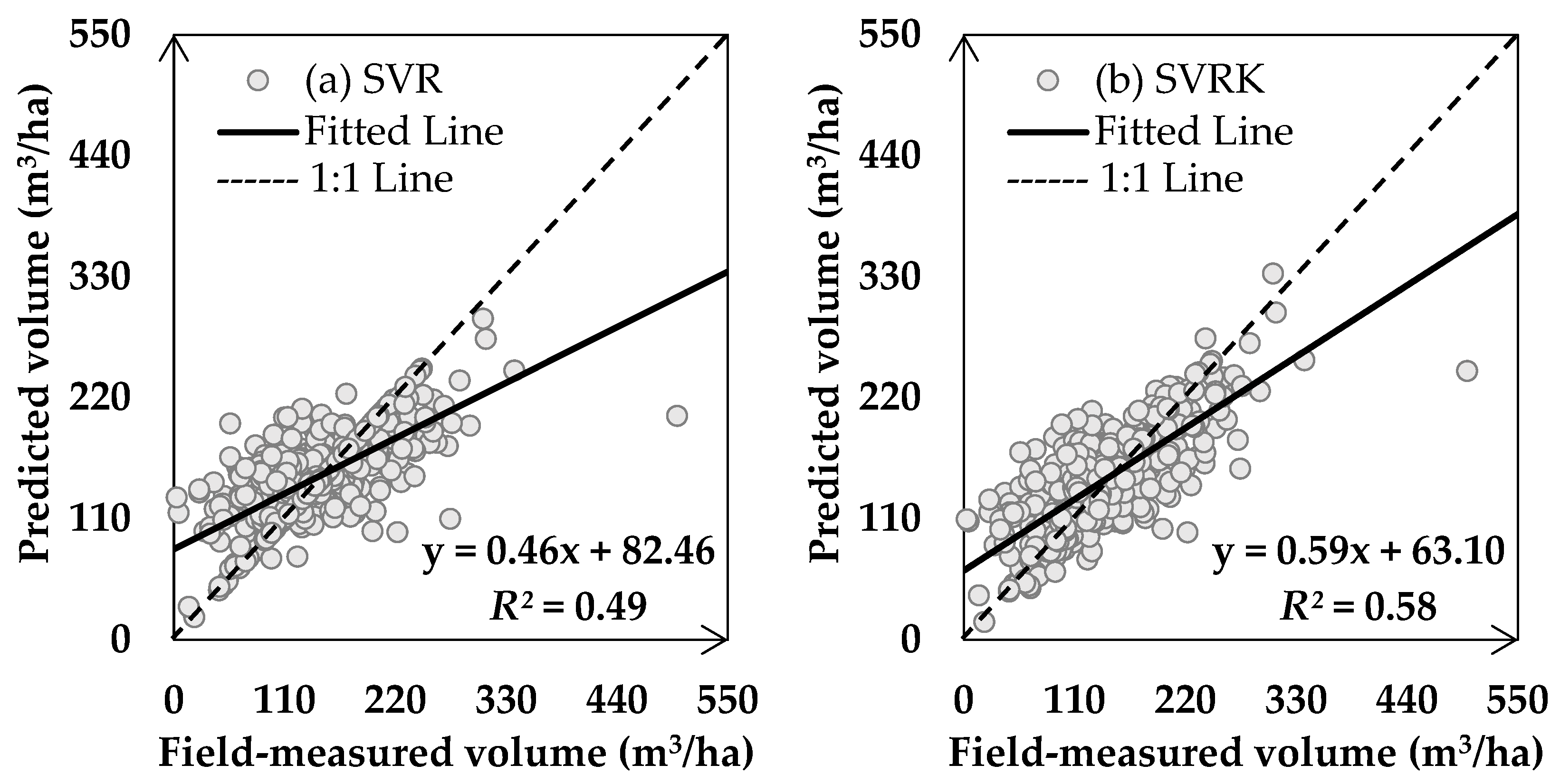
3.3. Models Assessment and Volume Mapping
4. Discussion
4.1. Multi-Sensor Satellite Predictors of Forest Volume Mapping
4.2. SVR versus SVRK
4.3. Spatial Variations of Stand Volume and Forest Management
5. Conclusions
- (1)
- SVRK can accurately predict stand volume of the heterogeneous Changbai Mountains Mixed forests with RMSE of 25.3% based on the low sampling density of 928 samples/171,450 ha, which improved accuracy of 9% than SVR.
- (2)
- Topographic indices from ALOS DSM as L band InSAR, backscatters of ALOS-2 as L band SAR, and texture features of VV channel from Sentinel-1 as C band SAR, as well as vegetation indices of Sentinel-2 MSI as the optical sensor were vital for explaining the observed variability of stand volume.
- (3)
- The northern part of the study area with high altitude had the largest volume values ranging from 195.51 to 532.83 m3/ha. In the south with low altitude and near a non-forest area, the smallest volume values ranged from 0.18 to 94.40 m3/ha.
- (4)
- Yong forests should be paid attention to and certain measures can be taken for sustainable forest management. Indeed, young forests with large volume need thinning, while that with small values should be enclosed for cultivation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dube, T.; Sibanda, M.; Shoko, C.; Mutanga, O. Stand-volume estimation from multi-source data for coppiced and high forest Eucalyptus Spp. silvicultural systems in KwaZulu-Natal, South Africa. ISPRS J. Photogramm. Remote Sens. 2017, 132, 162–169. [Google Scholar] [CrossRef]
- Chirici, G.; Mura, M.; McInerney, D.; Py, N.; Tomppo, E.O.; Waser, L.T.; Travaglini, D.; McRoberts, R.E. A meta-analysis and review of the literature on the k-nearest neighbors technique for forestry applications that use remotely sensed data. Remote Sens. Environ. 2016, 176, 282–294. [Google Scholar] [CrossRef]
- Boisvenue, C.; Smiley, B.P.; White, J.C.; Kurz, W.A.; Wulder, M.A. Integration of Landsat time series and field plots for forest productivity estimates in decision support models. For. Ecol. Manag. 2016, 376, 284–297. [Google Scholar] [CrossRef]
- Lehmann, E.A.; Caccetta, P.; Lowell, K.; Mitchell, A.; Zhou, Z.S.; Held, A.; Milne, T.; Tapley, I. SAR and optical remote sensing: Assessment of complementarity and interoperability in the context of a large-scale operational forest monitoring system. Remote Sens. Environ. 2015, 156, 335–348. [Google Scholar] [CrossRef]
- Main, R.; Mathieu, R.; Kleynhans, W.; Wessels, K.; Naidoo, L. Hyper-temporal C Band SAR for baseline woody structural assessments in deciduous savannas. Remote Sens. 2016, 8, 661. [Google Scholar] [CrossRef]
- Chen, G.; Hay, G.J.; St-Onge, B. A GEOBIA framework to estimate forest parameters from lidar transects, Quickbird imagery and machine learning: A case study in Quebec, Canada. Int. J. Appl. Earth Obs. Geoinf. 2012, 15, 28–37. [Google Scholar] [CrossRef]
- Viana, H.; Aranha, J.; Lopes, O.; Cohen, W.B. Estimation of crown biomass of Pinus pinaster stands and shrubland above-ground biomass using forest inventory data, remotely sensed imagery and spatial prediction models. Ecol. Model. 2012, 226, 22–35. [Google Scholar] [CrossRef]
- Santoro, M.; Wegmüller, U.; Askne, J. Forest stem volume estimation using C-band interferometric SAR coherence data of the ERS-1 mission 3-days repeat-interval phase. Remote Sens. Environ. 2018, 216, 684–696. [Google Scholar] [CrossRef]
- Roy, A.; Royer, A.; Wigneron, J.-P.; Langlois, A.; Bergeron, J.; Cliche, P. A simple parameterization for a boreal forest radiative transfer model at microwave frequencies. Remote Sens. Environ. 2012, 124, 371–383. [Google Scholar] [CrossRef]
- Sharma, R.C.; Kajiwara, K.; Honda, Y. Estimation of forest canopy structural parameters using kernel-driven bi-directional reflectance model based multi-angular vegetation indices. ISPRS J. Photogramm. Remote Sens. 2013, 78, 50–57. [Google Scholar] [CrossRef]
- Alrababah, M.A.; Alhamad, M.N.; Bataineh, A.L.; Bataineh, M.N.; Suwaileh, A.F. Estimating east Mediterranean forest parameters using Landsat ETM. Int. J. Remote Sens. 2011, 32, 1561–1574. [Google Scholar] [CrossRef]
- Nilsson, M.; Nordkvist, K.; Jonzén, J.; Lindgren, N.; Axensten, P.; Wallerman, J.; Egberth, M.; Larsson, S.; Nilsson, L.; Eriksson, J.; et al. A nationwide forest attribute map of Sweden predicted using airborne laser scanning data and field data from the National Forest Inventory. Remote Sens. Environ. 2017, 194, 447–454. [Google Scholar] [CrossRef]
- Leboeuf, A.; Fournier, R.A.; Luther, J.E.; Beaudoin, A.; Guindon, L. Forest attribute estimation of northeastern Canadian forests using QuickBird imagery and a shadow fraction method. For. Ecol. Manag. 2012, 266, 66–74. [Google Scholar] [CrossRef]
- Abdullahi, S.; Kugler, F.; Pretzsch, H. Prediction of stem volume in complex temperate forest stands using TanDEM-X SAR data. Remote Sens. Environ. 2016, 174, 197–211. [Google Scholar] [CrossRef]
- Tamm, T.; Remm, K. Estimating the parameters of forest inventory using machine learning and the reduction of remote sensing features. Int. J. Appl. Earth Obs. Geoinf. 2009, 11, 290–297. [Google Scholar] [CrossRef]
- Wang, M.J.; Sun, R.; Xiao, Z.Q. Estimation of forest canopy height and aboveground biomass from spaceborne LiDAR and Landsat imageries in Maryland. Remote Sens. 2018, 10, 344. [Google Scholar] [CrossRef]
- Pal, M.; Mather, P.M. Support vector machines for classification in remote sensing. Int. J. Remote Sens. 2005, 26, 1007–1011. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, G.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- dos Reis, A.A.; Carvalho, M.C.; de Mello, J.M.; Gomide, L.R.; Ferraz Filho, A.C.; Acerbi, F.W. Spatial prediction of basal area and volume in Eucalyptus stands using Landsat TM data: An assessment of prediction methods. N. Z. J. For. Sci. 2018, 48, 1. [Google Scholar] [CrossRef]
- de Souza, G.S.A.; Soares, V.P.; Leite, H.G.; Gleriani, J.M.; do Amaral, C.H.; Ferraz, A.S.; de Freitas Silveira, M.V.; dos Santos, J.F.C.; Silveira Velloso, S.G.; Domingues, G.F.; et al. Multi-sensor prediction of Eucalyptus stand volume: A support vector approach. ISPRS J. Photogramm. Remote Sens. 2019, 156, 135–146. [Google Scholar] [CrossRef]
- Kumar, S.; Lai, R.; Liu, D.S. A geographically weighted regression kriging approach for mapping soil organic carbon stock. Geoderma 2012, 189–190, 627–634. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.A.; Webster, R.; Kidd, D. Mapping gamma radiation and its uncertainty from weathering products in a Tasmanian landscape with a proximal sensor and random forest kriging. Earth Surf. Proc. Land. 2013, 39, 735–748. [Google Scholar] [CrossRef]
- Tarasov, D.A.; Buevich, A.G.; Sergeev, A.P.; Shichkin, A.V. High variation topsoil pollution forecasting in the Russian Subarctic: Using artificial neural networks combined with residual kriging. Appl. Geochem. 2018, 88, 188–197. [Google Scholar] [CrossRef]
- Meng, Q.M.; Cieszewski, C.; Madden, M. Large area forest inventory using Landsat ETM+: A geostatistical approach. ISPRS J. Photogramm. Remote Sens. 2009, 64, 27–36. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.Q.; Ren, C.Y.; Zhang, B.; Wang, Z.M. Assessment of multi-wavelength SAR and multispectral instrument data for forest aboveground biomass mapping using random forest kriging. For. Ecol. Manag. 2019, 447, 12–25. [Google Scholar] [CrossRef]
- Fayad, I.; Baghdadi, N.; Bailly, J.S.; Barbier, N.; Gond, V.; Hérault, B.; Hajj, M.E.; Fabre, F.; Perrin, J. Regional scale rain-forest height mapping using regression-kriging of spaceborne and airborne LiDAR data: Application on French Guiana. Remote Sens. 2016, 8, 240. [Google Scholar] [CrossRef]
- Li, Q.Q.; Zhang, X.; Wang, C.Q.; Li, B.; Gao, X.S.; Yuan, D.G.; Luo, Y.L. Spatial prediction of soil nutrient in a hilly area using artificial neural network model combined with kriging. Arch. Agron. Soil Sci. 2016, 62, 1541–1553. [Google Scholar] [CrossRef]
- Fazakas, Z.; Nilsson, M.; Olsson, H. Regional forest biomass and wood volume estimation using satellite data and ancillary data. Agric. For. Meteorol. 1999, 98–99, 417–425. [Google Scholar] [CrossRef]
- Wilhelm, S.; Hüttich, C.; Korets, M.; Schmullius, C. Large area mapping of boreal growing stock volume on an annual and multi-temporal level using PALSAR L-band backscatter mosaics. Forests 2014, 5, 1990–2015. [Google Scholar] [CrossRef]
- Chrysafis, I.; Mallinis, G.; Tsakiri, M.; Patias, P. Evaluation of single-date and multi-seasonal spatial and spectral information of Sentinel-2 imagery to assess growing stock volume of a Mediterranean forest. Int. J. Appl. Earth Obs. Geoinf. 2019, 77, 1–14. [Google Scholar] [CrossRef]
- Ataee, M.S.; Maghsoudi, Y.; Latifi, H.; Fadaie, F. Improving estimation accuracy of growing stock by multi-frequency SAR and multi-spectral data over Iran’s heterogeneously-structured broadleaf Hyrcanian forests. Forests 2019, 10, 641. [Google Scholar] [CrossRef]
- Mauya, E.W.; Koskinen, J.; Tegel, K.; Hämäläinen, J.; Kauranne, T.; Käyhkö, N. Modelling and predicting the growing stock volume in small-scale plantation forests of Tanzania using multi-sensor image synergy. Forests 2019, 10, 279. [Google Scholar] [CrossRef]
- Peregon, A.; Yamagata, Y. The use of ALOS/PALSAR backscatter to estimate above-ground forest biomass: A case study in Western Siberia. Remote Sens. Environ. 2013, 137, 139–146. [Google Scholar] [CrossRef]
- Reiche, J.; Lucas, R.; Mitchell, A.L.; Verbesselt, J.; Hoekman, D.H.; Haarpaintner, J.; Kellndorfer, J.M.; Rosenqvist, A.; Lehmann, E.A.; Woodcock, C.E.; et al. Combining satellite data for better tropical forest monitoring. Nat. Clim. Chang. 2016, 6, 120–122. [Google Scholar] [CrossRef]
- Chowdhury, T.A.; Thiel, C.; Schmullius, C. Growing stock volume estimation from L-band ALOS PALSAR polarimetric coherence in Siberian forest. Remote Sens. Environ. 2014, 155, 129–144. [Google Scholar] [CrossRef]
- Santoro, M.; Cartus, O.; Fransson, J.E.S.; Wegmüller, U. Complementarity of X-, C-, and L-band SAR backscatter observations to retrieve forest stem volume in boreal forest. Remote Sens. 2019, 11, 1563. [Google Scholar] [CrossRef]
- Stage, A.R.; Salas, C. Interactions of elevation, aspect, and slope in models of forest species composition and productivity. For. Sci. 2007, 53, 486–492. [Google Scholar]
- Rahlf, J.; Breidenbach, J.; Solberg, S.; Næsset, E.; Astrup, R. Comparison of four types of 3D data for timber volume estimation. Remote Sens. Environ. 2014, 155, 325–333. [Google Scholar] [CrossRef]
- Tadono, T.; Takaku, J.; Tsutsui, K.; Oda, F.; Nagai, H. Status of “ALOS World 3D (AW3D)” global DSM generation. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Xu, C.; Manley, B.; Morgenroth, J. Evaluation of modelling approaches in predicting forest volume and stand age for small-scale plantation forests in New Zealand with RapidEye and LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 386–396. [Google Scholar] [CrossRef]
- Schumacher, J.; Rattay, M.; Kirchhöfer, M.; Adler, P.; Kändler, G. Combination of multi-temporal sentinel 2 images and aerial image based canopy height models for timber volume modelling. Forests 2019, 10, 746. [Google Scholar] [CrossRef]
- Olson, D.M.; Dinerstein, E.; Wikramanayake, E.D.; Burgess, N.D.; Powell, G.V.N.; Underwood, E.C.; D’Amico, J.A.; Itoua, I.; Strand, H.E.; Morrison, J.C.; et al. Terrestrial ecoregions of the world: A new map of life on Earth. Bioscience 2001, 51, 933–938. [Google Scholar] [CrossRef]
- Wang, Y.Q.; Wu, Z.F.; Yuan, X.; Zhang, H.Y.; Zhang, J.Q.; Xu, J.W.; Lu, Z.; Zhou, Y.Y.; Feng, J. Resources and ecological security of the Changbai Mountain region in Northeast Asia. In Remote Sensing of Protected Lands; Wang, Y.Q., Ed.; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Cai, H.Y.; Di, X.Y.; Chang, S.X.; Wang, C.K.; Shi, B.K.; Geng, P.F.; Jin, G.Z. Carbon storage, net primary production, and net ecosystem production in four major temperate forest types in northeastern China. Can. J. For. Res. 2016, 45, 143–151. [Google Scholar] [CrossRef]
- Ma, J.; Xiao, X.M.; Qin, Y.W.; Chen, B.Q.; Hu, Y.M.; Li, X.P.; Zhao, B. Estimating aboveground biomass of broadleaf, needleleaf, and mixed forests in Northeastern China through analysis of 25-m ALOS/PALSAR mosaic data. For. Ecol. Manag. 2017, 389, 199–210. [Google Scholar] [CrossRef]
- MOF (Ministry of Forestry). Standards for Forestry Resource Survey; China Forestry Publisher: Beijing, China, 1982. [Google Scholar]
- Forestry Administration of China. Tree Volume Tables (National Standard # LY/T 1353-1999); Forestry Administration of China: Beijing, China, 1999. [Google Scholar]
- Santi, E.; Paloscia, S.; Pettinato, S.; Chirici, G.; Mura, M.; Maselli, F. Application of neural networks for the retrieval of forest woody volume from SAR multifrequency data at L and C bands. Eur. J. Remote Sens. 2015, 48, 673–687. [Google Scholar] [CrossRef]
- Urbazaev, M.; Cremer, F.; Migliavacca, M.; Reichstein, M.; Schmullius, C.; Thiel, C. Potential of multi-temporal ALOS-2 PALSAR-2 ScanSAR data for vegetation height estimation in tropical forests of Mexico. Remote Sens. 2018, 10, 1227. [Google Scholar] [CrossRef]
- Shimada, M.; Isoguchi, O.; Tadono, T.; Isono, K. PALSAR radiometric and geometric calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3915–3932. [Google Scholar] [CrossRef]
- Sentinel-1_Team. Sentinel-1 User Handbook; European Space Agency: Paris, France, 2013. [Google Scholar]
- Dos Reis, A.A.; Franklin, S.E.; de Mello, J.M.; Junior, F.W.A. Volume estimation in a Eucalyptus plantation using multi-source remote sensing and digital terrain data: A case study in Minas Gerais State, Brazil. Int. J. Remote Sens. 2019, 4, 2683–2702. [Google Scholar] [CrossRef]
- Veci, L. Sentinel-1 Toolbox: SAR Basics Tutorial; ARRAY Systems Computing, Inc.: Toronto, ON, Canada; European Space Agency: Paris, France, 2015. [Google Scholar]
- Laurin, G.V.; Balling, J.; Corona, P.; Mattioli, W.; Papale, D.; Puletti, N.; Rizzo, M.; Truckenbrodt, J.; Urban, M. Above-ground biomass prediction by Sentinel-1 multitemporal data in central Italy with integration of ALOS2 and Sentinel-2 data. J. Appl. Remote Sens. 2018, 12, 016008. [Google Scholar] [CrossRef]
- Sentinel-2_Team. Sentinel-2 User Handbook; European Space Agency: Paris, France, 2015. [Google Scholar]
- Puliti, S.; Saarela, S.; Gobakken, T.; Ståhl, G.; Naesset, E. Combining UAV and Sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497. [Google Scholar] [CrossRef]
- Astola, H.; Häme, T.; Sirro, L.; Molinier, M.; Kilpi, J. Comparison of Sentinel-2 and Landsat 8 imagery for forest variable prediction in boreal region. Remote Sens. Environ. 2019, 223, 257–273. [Google Scholar] [CrossRef]
- Chrysafis, I.; Mallinis, G.; Siachalou, S.; Patias, P. Assessing the relationships between growing stock volume and Sentinel-2 imagery in a Mediterranean forest ecosystem. Remote Sens. Lett. 2017, 8, 508–517. [Google Scholar] [CrossRef]
- Wittke, S.; Yu, X.W.; Karjalainen, M.; Hyyppä, J.; Puttonen, E. Comparison of two-dimensional multitemporal Sentinel-2 data with three dimensional remote sensing data sources for forest inventory parameter estimation over a boreal forest. Int. J. Appl. Earth Obs. Geoinf. 2019, 76, 167–178. [Google Scholar] [CrossRef]
- Wijaya, A.; Kusnadi, S.; Gloaguen, R.; Heilmeier, H. Improved strategy for estimating stem volume and forest biomass using moderate resolution remote sensing data and GIS. J. For. Res. 2010, 21, 1–12. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.Q.; Ren, C.Y.; Zhang, B.; Wang, Z.M. Optimal combination of predictors and algorithms for forest above-ground biomass mapping from Sentinel and SRTM data. Remote Sens. 2019, 11, 414. [Google Scholar] [CrossRef]
- Xu, L.; Shi, Y.J.; Fang, H.Y.; Zhou, G.M.; Xu, X.J.; Zhou, Y.F.; Tao, J.X.; Ji, B.Y.; Xu, J.; Li, C.; et al. Vegetation carbon stocks driven by canopy density and forest age in subtropical forest ecosystems. Sci. Total Environ. 2018, 631–632, 619–626. [Google Scholar] [CrossRef]
- Gunn, S.R. Support Vector Machines for Classification and Regression; Technical Report; University of Southampton: Southampton, UK, 1998. [Google Scholar]
- Williams, G. Data Mining with Rattle and R: The Art of Excavating Data for Knowledge Discovery, use R; Springer Science+Business Media, LLC: New York, NY, USA, 2011. [Google Scholar]
- Were, K.; Bui, D.T.; Dick, Ø.B.; Singh, B.R. A comparative assessment of support vector regression, artificial neural networks, and random forests for predicting and mapping soil organic carbon stocks across an Afromontane landscape. Ecol. Indic. 2015, 52, 394–403. [Google Scholar] [CrossRef]
- Platt, J. Fast Training of Support Vector Machines Using Sequential Minimal Optimization; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Isaaks, E.H.; Srivastava, R.M. An Introduction to Applied Geostatistics; Oxford University Press: Oxford, England, 1989. [Google Scholar]
- Ou, Y.; Rousseau, A.N.; Wang, L.X.; Yan, B.X. Spatio-temporal patterns of soil organic carbon and pH in relation to environmental factors-A case study of the Black Soil Region of Northeastern China. Agric. Ecosyst. Environ. 2017, 245, 22–31. [Google Scholar] [CrossRef]
- Tang, G.A.; Yang, X. ArcGIS Experimental Course for Spatial Analysis, 2nd ed.; Science Press: Beijing, China, 2013. [Google Scholar]
- Chen, L.; Ren, C.Y.; Zhang, B.; Wang, Z.M.; Wang, Y.Q. Mapping spatial variations of structure and function parameters for forest condition assessment of the Changbai Mountain National Nature Reserve. Remote Sens. 2019, 11, 3004. [Google Scholar] [CrossRef]
- Lu, D.S.; Chen, Q.; Wang, G.X.; Liu, L.J.; Li, G.Y.; Moran, E. A survey of remote sensing-based aboveground biomass estimation methods in forest ecosystems. Int. J. Digit. Earth 2016, 9, 63–105. [Google Scholar] [CrossRef]
- Gama, F.F.; dos Santos, J.R.; Mura, J.C. Eucalyptus biomass and volume estimation using interferometric and polarimetric SAR data. Remote Sens. 2010, 2, 939–956. [Google Scholar] [CrossRef]
- Solberg, S.; Astrup, R.; Breidenbach, J.; Nilsen, B.; Weydahl, D. Monitoring spruce volume and biomass with InSAR data from TanDEM-X. Remote Sens. Environ. 2013, 139, 60–67. [Google Scholar] [CrossRef]
- Aslan, A.; Rahman, A.F.; Warren, M.W.; Robeson, S.W. Mapping spatial distribution and biomass of coastal wetland vegetation in Indonesian Papua by combining active and passive remotely sensed data. Remote Sens. Environ. 2016, 183, 65–81. [Google Scholar] [CrossRef]
- Sinha, S.; Santra, A.; Sharma, L.; Jeganathan, C.; Nathawat, M.S.; Das, A.K.; Mohan, S. Multi-polarized Radarsat-2 satellite sensor in assessing forest vigor from above ground biomass. J. For. Res. 2018, 29, 1139–1145. [Google Scholar] [CrossRef]
- Pham, T.D.; Yoshion, K. Aboveground biomass estimation of mangrove species using ALOS-2 PALSAR imagery in Hai Phong City, Vietnam. J. Appl. Remote Sens. 2017, 11, 026010. [Google Scholar] [CrossRef]
- Fransson, J.E.S.; Ispraelsson, H. Estimation of stem volume in boreal forests using ERS-1 C- an JERS-1 L-band SAR data. Int. J. Remote Sens. 1999, 20, 123–137. [Google Scholar] [CrossRef]
- Thiel, C.; Schmullius, C. The potential of ALOS PALSAR backscatter and InSAR coherence for forest growing stock volume estimation in Central Siberia. Remote Sens. Environ. 2016, 173, 258–273. [Google Scholar] [CrossRef]
- Morin, D.; Planells, M.; Guyon, D.; Villard, L.; Mermoz, S.; Bouvet, A.; Thevenon, H.; Dejoux, J.-F.; Toan, T.L.; Dedieu, G. Estimation and mapping of forest structure parameters from open access satellite images: Development of a generic method with a study case on coniferous plantation. Remote Sens. 2019, 11, 1275. [Google Scholar] [CrossRef]
- Peña, M.A.; Brenning, A.; Sagredo, A. Constructing satellite-derived hyperspectral indices sensitive to canopy structure variables of a Cordilleran Cypress (Austrocedrus chilensis) forest. ISPRS J. Photogramm. Remote Sens. 2012, 74, 1–10. [Google Scholar] [CrossRef]
- Lausch, A.; Erasmi, S.; King, D.J.; Magdon, P.; Heurich, M. Understanding forest health with remote sensing-part II—A review of approaches and data models. Remote Sens. 2017, 9, 129. [Google Scholar] [CrossRef]
- Dube, T.; Mutanga, O.; Abdel-Rahman, E.A.; Ismail, R.; Slotow, R. Predicting Eucalyptus spp. Stand volume in Zululand, South Africa: An analysis using a stochastic gradient boosting regression ensemble with multi-source data sets. Int. J. Remote Sens. 2015, 36, 3751–3772. [Google Scholar] [CrossRef]
- Latifi, H.; Nothdurft, A.; Koch, B. Non-parametric prediction and mapping of standing timber volume and biomass in a temperate forest: Application of multiple optical/LiDAR-derived predictors. Forestry 2010, 83, 395–407. [Google Scholar] [CrossRef]
- Mura, M.; Bottalico, F.; Giannetti, F.; Bertani, R.; Giannini, R.; Mancini, M.; Orlandini, S.; Travaglini, D.; Chiricia, G. Exploiting the capabilities of the Sentinel-2 multi spectral instrument for predicting growing stock volume in forest ecosystems. Int. J. Appl. Earth Obs. Geoinf. 2018, 66, 126–134. [Google Scholar] [CrossRef]
- Korhonen, L.; Packalen, H.P.; Rautiainen, M. Comparison of Sentinel-2 and Landsat 8 in the estimation of boreal forest canopy cover and leaf area index. Remote Sens. Environ. 2017, 195, 259–274. [Google Scholar] [CrossRef]
- Dai, F.Q.; Zhou, Q.G.; Lv, Z.Q.; Wang, X.M.; Liu, G.C. Spatial prediction of soil organic matter content integrating artificialneural network and ordinary kriging in Tibetan Platea. Ecol. Indic. 2014, 45, 184–194. [Google Scholar] [CrossRef]
- Guo, P.T.; Li, M.F.; Luo, W.; Tang, Q.F.; Liu, Z.W.; Lin, Z.M. Digital mapping of soil organic matter for rubber plantation at regional scale: An application of random forest plus residuals kriging approach. Geoderma 2015, 237–238, 49–59. [Google Scholar] [CrossRef]
- Tziachris, P.; Aschonitis, V.; Chatzistathis, T.; Papadopoulou, M. Assessment of spatial hybrid methods for predicting soil organic matter using DEM derivatives and soil parameters. Catena 2019, 174, 206–216. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Elements | Time | Spatial Resolution (m) |
|---|---|---|---|
| ALOS-2 | N043E127/N043E128/ N044E127/N044E128 | 2017 | 25 |
| Sentinel-1 | D633_FCEE of Sentinel-1B | 20170927 | 10 |
| Sentinel-2 | T52TCP/T52TCN of Sentinel-2A, | 20170923 | 10 |
| T52TDN of Sentinel-2B | 20170925 | ||
| ALOS | N042E127/N042E128/ N043E127/N043E128 | Derived from PALSAR data during 2006 to 2011 | 30 |
| Source Image | Relevant Variables | Description | |
|---|---|---|---|
| ALOS-2 L band SAR | Polarization | HV | Normalized backscatter coefficient of horizontal transmit-vertical channel in dB |
| HH | Normalized backscatter coefficient of horizontal transmit-horizontal channel in dB | ||
| Sentinel-1 C band SAR | Polarization | VV | Normalized backscatter coefficient of vertical transmit-vertical channel in dB |
| VH | Normalized backscatter coefficient of vertical transmit-horizontal channel in dB | ||
| Texture | VV/VH_CON | Contrast | |
| VV/VH_DIS | Dissimilarity | ||
| VV/VH_HOM | Homogeneity | ||
| VV/VH_ASM | Angular second moment | ||
| VV/VH_ENE | Energy | ||
| VV/VH_MAX | Maximum probability | ||
| VV/VH_ENT | Entropy | ||
| VV/VH_MEA | Gray-level co-occurrence matrix (GLCM) mean | ||
| VV/VH_VAR | GLCM variance | ||
| VV/VH_COR | GLCM correlation | ||
| Sentinel-2 MSI | Multispectral bands | B2 | Blue, 490 nm |
| B3 | Green, 560 nm | ||
| B4 | Red, 665 nm | ||
| B5 | Red edge, 705 nm | ||
| B6 | Red edge, 749 nm | ||
| B7 | Red edge, 783 nm | ||
| B8 | Near infrared, 842 nm | ||
| B8a | Near infrared, 865 nm | ||
| B11 | Short-wave infrared, 1610 nm | ||
| B12 | Short-wave infrared, 2190 nm | ||
| Vegetation indices | RVI | Ratio vegetation index, B8/B4 | |
| DVI | Difference vegetation index, B8–B4 | ||
| PVI | Perpendicular vegetation index, sin(45°)×B8–cos(45°)×B4 | ||
| NDVI | Normalized difference vegetation index, (B8 − B4)/(B8 + B4) | ||
| SAVI | Soil adjusted vegetation index, 1.5 × (B8 − B4)/(B8 + B4 + 0.5) | ||
| NDVI5 | Normalized difference vegetation index with bands 4 and 5, (B5 − B4)/(B5 + B4) | ||
| NLI5 | Non-linear vegetation index with bands 4 and 5, (B52 − B4)/(B52 + B4) | ||
| NDVI6 | Normalized difference vegetation index with bands 4 and 6, (B6 − B4)/(B6 + B4) | ||
| NDVI7 | Normalized difference vegetation index with bands 4 and 7, (B7 − B4)/(B7 + B4) | ||
| NDVI8a | Normalized difference vegetation index with bands 4 and 8a, (B8a − B4)/(B8a + B4) | ||
| MSI | Moisture stress index, B8/B11 | ||
| EVI5 | Enhanced vegetation index with bands 4, 5 and 2, 2.5 * (B5 − B4) / (B5 + 6 * B4 − 7.5 * B2 + 1) | ||
| S2REP | Sentinel-2 red-edge position index, 705 + 35 × [(B4 + B7)/2 − B5] × (B6 − B5) | ||
| Transform indices | TCW | Tasseled cap wetness, 0.1509 * B2 + 0.1973 * B3 + 0.3279 * B4 + 0.3406 * B8 + 0.7112 * B11 + 0.4572 * B12 | |
| TCB | Tasseled cap brightness, 0.3037 * B2 + 0.2793 * B3 + 0.4743 * B4 + 0.5585 * B8 + 0.5082 * B11 + 0.1863 * B12 | ||
| TCG | Tasseled cap greenness, −0.2848 * B2 − 0.2435 * B3 − 0.5436 * B4 + 0.7243 * B8 + 0.0840 * B11 − 0.1800 * B12 | ||
| ALOS DSM | Topographic indicators | H | Elevation |
| S | Slope | ||
| A | Aspect | ||
| M | Surface roughness | ||
| SPI | Stream power index, Ln[Ac × tanβ × 100] | ||
| Source Image | Related Variables | r | Collinear With | Predictors |
|---|---|---|---|---|
| ALOS-2 | HV | 0.138 ** | / | Yes |
| HH | 0.181 ** | / | Yes | |
| Sentinel-1 | VV | 0.075 ** | / | Yes |
| VV_MEA | 0.090 ** | VV/VH_ VAR, VH_MEA | Yes | |
| VV_VAR | 0.087 ** | VV/VH_MEA, VH_VAR | No | |
| VH_MEA | 0.057 * | VV/VH_ VAR, VV_MEA | No | |
| VH_VAR | 0.061 * | VV/VH_MEA, VV_VAR | No | |
| Sentinel-2 | B2 | −0.192 ** | / | Yes |
| B3 | −0.111 ** | B5, TCW | Yes | |
| B4 | −0.162 ** | / | Yes | |
| B5 | −0.079 ** | B3, B11, TCW | No | |
| B11 | −0.111 ** | B5, B12, TCW | No | |
| B12 | −0.145 ** | B11 | Yes | |
| RVI | 0.145 ** | NDVI, NDVI5, NDVI6, NDVI7, NDVI8a | No | |
| DVI | 0.087 ** | PVI, SAVI, TCG | No | |
| PVI | 0.087 ** | DVI, SAVI, TCG | No | |
| NDVI | 0.175 ** | RVI, NDVI5, NDVI6, NDVI7, NDVI8a | Yes | |
| SAVI | 0.110 ** | DVI, PVI, TCG | Yes | |
| NDVI5 | 0.151 ** | RVI, NDVI, NDVI6, NDVI7, NDVI8a | No | |
| NLI5 | 0.065 * | / | Yes | |
| NDVI6 | 0.165 ** | RVI, NDVI5, NDVI, NDVI7, NDVI8a | No | |
| NDVI7 | 0.166 ** | RVI, NDVI5, NDVI, NDVI6, NDVI8a | No | |
| NDVI8a | 0.167 ** | RVI, NDVI5, NDVI, NDVI6, NDVI7 | No | |
| MSI | 0.105 ** | / | Yes | |
| S2REP | 0.063 * | / | Yes | |
| TCW | −0.074 ** | B3, B5, B11 | No | |
| TCG | 0.087 ** | DVI, PVI, SAVI | No | |
| ALOS DSM | H | 0.252 ** | / | Yes |
| S | 0.154 ** | M | Yes | |
| A | 0.091 ** | / | Yes | |
| M | 0.117 ** | S | No |
| Model | ME | RMSE | r | RI | ||
|---|---|---|---|---|---|---|
| m3/ha | % | m3/ha | % | |||
| SVR | −4.49 | −3.07 | 40.73 | 27.88 | 0.70 | / |
| SVRK | −3.9 | −2.67 | 36.96 | 25.30 | 0.76 | 0.09 |
| Age | Minimum | Maximum | Mean | Standard Deviation | Coefficient of Variation (%) |
|---|---|---|---|---|---|
| Yong | 0.18 | 358.78 | 134.79 | 29.91 | 22.19 |
| Middle-age | 0.21 | 520.56 | 138.30 | 29.79 | 21.54 |
| Near-mature | 1.18 | 463.83 | 152.51 | 28.47 | 18.67 |
| Mature | 1.71 | 532.83 | 156.38 | 30.09 | 19.24 |
| Over-mature | 7.91 | 521.99 | 160.48 | 30.64 | 19.09 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Ren, C.; Zhang, B.; Wang, Z. Multi-Sensor Prediction of Stand Volume by a Hybrid Model of Support Vector Machine for Regression Kriging. Forests 2020, 11, 296. https://doi.org/10.3390/f11030296
Chen L, Ren C, Zhang B, Wang Z. Multi-Sensor Prediction of Stand Volume by a Hybrid Model of Support Vector Machine for Regression Kriging. Forests. 2020; 11(3):296. https://doi.org/10.3390/f11030296
Chicago/Turabian StyleChen, Lin, Chunying Ren, Bai Zhang, and Zongming Wang. 2020. "Multi-Sensor Prediction of Stand Volume by a Hybrid Model of Support Vector Machine for Regression Kriging" Forests 11, no. 3: 296. https://doi.org/10.3390/f11030296
APA StyleChen, L., Ren, C., Zhang, B., & Wang, Z. (2020). Multi-Sensor Prediction of Stand Volume by a Hybrid Model of Support Vector Machine for Regression Kriging. Forests, 11(3), 296. https://doi.org/10.3390/f11030296