Using Conjoint Analyses to Improve Cable Yarder Design Characteristics: An Austrian Yarder Case Study to Advance Cost-Effective Extraction

 ,
, 
 and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Decision Problem
2.2. Conjoint Analysis—Survey Design and Procedure
2.3. Criteria (Attributes and Levels)
- Anchor ropes (number, length, dimensions)
- Area of application
- Average productivity
- Camera (infrared, radio frequency, size of display, price)
- Carriage/grapple (type, weight, opening width, opening procedure, generation of clamping force, price, camera included, maximum load, GPS position)
- Carrier
- Control system
- Cost of maintenance
- Driving speed during transfer
- Effort for mounting and dismounting – Uphill, Downhill
- Engine output
- Fuel consumption
- Haulback line (length, dimensions, price, max. operating hours of economic use, max. years of economic use)
- Lifting capacity
- Mainline (length, dimensions, price, max. operating hours of economic use, max. years of economic use)
- Number of people which are necessary for operating the system
- Price
- Propulsion principle of winches
- Rigging system/configuration
- Rope speed (outhaul)
- Skyline (length, dimensions, price, max. operating hours of economic use, max. years of economic use)
- Solutions for synchronizing winches
- Tower (height, assembly)
- Transport dimensions
- Weight
- Working dimensions
- Traction (core/full drum)
2.4. Cable Yarder Scenarios
2.5. Participant Progress
3. Results
3.1. Attributes Ranking and Weights
3.2. Normalized Attribute Weights and Single Attribute Scores
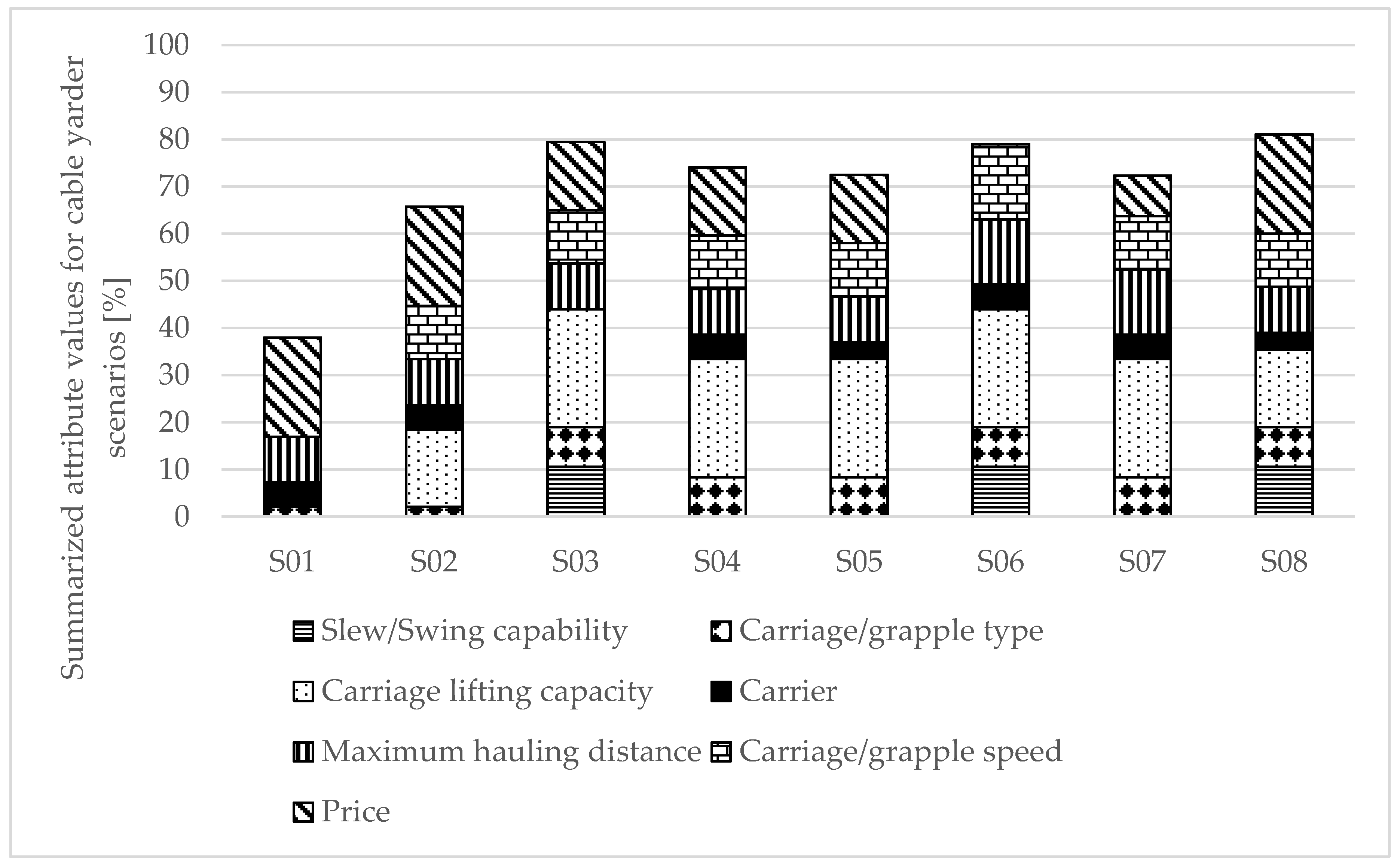
3.3. Ranking of Scenarios
4. Discussion
4.1. Comparison with other Studies
4.2. Practical Implementation of Results
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
| Attributes | Levels | Description 1 |
|---|---|---|
| (1) Slew/Swing capability |
| Yarders come with either a swinging boom or a fixed boom. Most swinging booms have a limited height of 10 to 20 m. Fixed boom yarders can have towers as tall as 30 m. Swinging booms permit a wider skyline corridor and thereby reduce the number of yarder moves. This is a big advantage when grapple yarding. A swing boom yarder will provide more deflection for uphill yarding than is available to a fixed tower of the same height if the fixed tower has to set a log length back of the fill slope. On the other hand, fixed towers are usually taller than the booms on swing boom yarders. |
| (2) Carriage/grapple type |
| Carriages are described as either slack-pulling or nonslack-pulling. Slack-pulling refers to the ability to pull slack in the skidding line or have the skidding line pulled through the carriage. A non-slack-pulling carriage (e.g., grapple) has no means of allowing the skidding line to be contained in or pass through it. Without special rigging, this prevents lateral yarding. A slack-pulling carriage either permits the mainline to be used as a skid line and pulled through the carriage, or it has its own drum with a skid line that can be pulled out of the carriage to permit lateral yarding. A motorized slack-pulling carriage uses some type of power device in the carriage for pulling slack. The power may be in the form of mechanical springs, hydraulic motors, or diesel, propane-fueled or electrical engines. The carriage will clamp to the skyline and is remotely controlled by radio or by mechanical springs. A grapple carriage eliminates the need for a choker-setter and can save a lot of time. However, there are quite a few limitations associated with the grapple—you can only pick up trees/logs directly under the skyline. The design of a grapple carriage is similar to some of the mechanical slack-pulling carriages in that they must provide a means to open or close the grapple. This can be done with a line from the yarder (mechanical) or by using an engine or power device in the carriage (motorized). The grapple carriage cannot yard laterally unless it is side-blocked. |
| (3) Carriage lifting capacity = breakout force |
| A higher lifting capacity assumes higher productivity of the harvesting system but needs bigger and more powerful machines. |
| (4) Carrier |
| The carrier is the chassis of the yarder. Its function is to support the yarder equipment and allow transportation. Mobile yarders on tracks can manage steep/rough grade, are stable on soft ground and very maneuverable. Tank-type carriers can absorb some landing irregularities whereas excavator based carriers are more robust mechanically. Track-mounted carriers are limited in self-propelled transfer. Excavator based machines may not need anchor ropes and they can be fast to move and set-up. However, they can have less power and are smaller than other types of yarders. Truck-mounted yarders are fast when moving long distances and they can use public roads. On the other hand, purchase costs and weight is higher and they require well-formed, suitable grades. |
| (5) Maximum extraction distance (skyline cable length) |
| A longer extraction distance allows to harvest a larger area but requires a longer skyline and other cables. This usually means to apply bigger and more powerful machines. |
| (6) Carriage/grapple speed (outhaul) |
| A higher line speed allows higher productivity but requires more sophisticated technology. |
| (7) Price 2 |
| Bigger and more powerful machines as well as more sophisticated technology leads to a higher price. |
References
- Price, M.F.; Gratzer, G.; Duguma, L.A.; Kohler, T.; Maselli, D.; Romeo, R. (Eds.) Mountain Forests in a Changing World—Realizing Values, Addressing Challenges; FAO/MPS and SDC: Rome, Italy, 2011. [Google Scholar]
- Spinelli, R.; Visser, R.; Riond, C.; Magagnotti, N. A Survey of Logging Contract Rates in the Southern European Alps. Small-Scale For. 2017, 16, 179–193. [Google Scholar] [CrossRef]
- Visser, R.; Berkett, H. Effect of terrain steepness on machine slope when harvesting. Int. J. For. Eng. 2015, 26, 1–9. [Google Scholar] [CrossRef]
- Ghaffariyan, M.R.; Stampfer, K.; Sessions, J. Production Equations for Tower Yarders in Austria. Int. J. For. Eng. 2009, 20, 17–21. [Google Scholar] [CrossRef]
- Enache, A.; Kühmaier, M.; Visser, R.; Stampfer, K. Forestry operations in the European mountains: A study of current practices and efficiency gaps. Scand. J. For. Res. 2016, 31, 412–427. [Google Scholar] [CrossRef]
- Visser, R.; Harrill, H. Cable Yarding in North America and New Zealand: A Review of Developments and Practices. Croat. J. For. Eng. 2017, 38, 209–217. [Google Scholar]
- Bell, J.L. Changes in logging injury rates associated with use of feller-bunchers in West Virginia. J. Saf. Res. 2002, 33, 463–471. [Google Scholar] [CrossRef]
- Montorselli, N.B.; Lombardini, C.; Magagnotti, N.; Marchi, E.; Neri, F.; Picchi, G.; Spinelli, R. Relating safety, productivity and company type for motor-manual logging operations in the Italian Alps. Accid. Anal. Prev. 2010, 42, 2013–2017. [Google Scholar] [CrossRef]
- Visser, R.; Raymond, K.; Harrill, H. Developing Fully Mechanised Steep Terrain Harvesting Operations. In Proceedings of the 47th International Symposium on Forestry Mechanisation: Forest Engineering: Propelling the Forest Value Chain, Gerardmer, France, 23–26 September 2014; Available online: https://www.formec.org/images/proceedings/2014/a23.pdf (accessed on 22 November 2018).
- Heinimann, H.R.; Stampfer, K.; Loschek, J.; Caminada, L. Perspectives on Central European Cable Yarding Systems. In 2001—A Forest Engineering Odyssey, Proceedings of the International Mountain Logging and 11th Pacific Northwest Skyline Symposium, Seattle, WA, USA, 10–12 December 2001; pp. 268–279. Available online: https://depts.washington.edu/sky2001/proceedings/papers/Heinimann.pdf (accessed on 22 November 2018).
- Visser, R. Survey of Cable Yarders Used in New Zealand. Harvesting Technical Notes 2013, HTN06-03, 4p, Forest Growers Research. Available online: https://fgr.nz/documents/download/4034 (accessed on 22 November 2018).
- Harrill, H.; Visser, R. Survey of Yarders and Rigging Configurations: 2018. Harvesting Technical Notes 2018, HTN10–04, 9p, Forest Growers Research. Available online: https://fgr.nz/documents/download/7391 (accessed on 22 November 2018).
- NZFOA. New Zealand Plantation Forest Industry: Facts and Figures 2016/17. Available online: https://www.nzfoa.org.nz/images/stories/pdfs/Facts_Figures_2016_%C6%92a_web_version_v3.pdf (accessed on 30 January 2019).
- Harrill, H. Improving Cable Logging Operations for New Zealand’s Steep Terrain Forest Plantations. Ph.D. Thesis, School of Forestry, University of Canterbury, Christchurch, New Zealand, 2014; 242p. [Google Scholar]
- Raymond, K. Safety benefits of a harvesting research programme. N. Z. J. For. 2014, 59, 9–13. [Google Scholar]
- Raymond, K. Teleoperation of harvesting machinery for a safer future. In Forest Engineering: Making a Positive Contribution, Abstracts and Proceedings of the 48th FORMEC Symposium 2015, Linz, Austria, 4–8 October 2015; pp. 9–11. Available online: https://www.formec.org/images/proceedings/2015/formec_proceedings_2015_web.pdf (accessed on 22 November 2018).
- Visser, R. Benchmarking to Improve Harvesting Cost and Productivity: 2011 Update. Harvesting Technical Notes HTN04-08; Future Forests Research Ltd.: Rotorua, New Zealand, 2012; p. 7. [Google Scholar]
- Acuna, M.; Skinnell, J.; Mitchell, R.; Evanson, T. Bunching Stems in Steep Slopes for Efficient Yarder Extraction. CRC Forestry 2011, Hobart. Bulletin no. 17; 3p. Available online: http://research.usc.edu.au/vital/access/services/Download/usc:17454/SOURCE1 (accessed on 22 November 2018).
- Parschau, J. Planning and Assessment for Cable Harvesting Systems for Selective Harvesting in Native Forests of New South Wales. Special Scholarship Project (SRP301) 2012; University of the Sunshine Coast: Queensland, Australia, 2012; 32p. [Google Scholar]
- FFR. Four Corners June 2010. Available online: http://www.ffr.co.nz/system/files/newsletters/Four%20Corners%20June%202010.pdf (accessed on 15 March 2016).
- Amishev, D. Crew Best Practice—Costs and Productivity. Harvesting Technical Notes 2011, HTN03-07, 9p, Forest Growers Research. Available online: https://fgr.nz/documents/download/3975 (accessed on 22 November 2018).
- Slappendel, C.; Laird, I.; Kawachi, I.; Marshall, S.; Cryer, C. Factors affecting work-related injury among forestry workers: A review. J. Saf. Res. 1993, 24, 19–32. [Google Scholar] [CrossRef]
- Visser, R. Harvesting Cost and Productivity Benchmarking: 2013 Update; Harvesting Technical Notes HTN06-06; Future Forests Research Ltd.: Rotorua, New Zealand, 2014; 6p. [Google Scholar]
- Wassermann, C. Tower Yarders for Timber Harvesting—An Analysis of European Manufacturers and Models [Mastseilgeräte für die Holzernte—Eine Analyse des europäischen Herstellerangebotes]. Master Thesis, University of Natural Resources and Life Sciences Vienna, Wien, Vienna, 2018; 132p. [Google Scholar]
- Belton, V.; Stewart, T. Multiple Criteria Decision Analysis: An Integrated Approach; Kluwer Academic Publishers: Boston, MA, USA, 2002; ISBN 978-1-4615-1495-4. 372p. [Google Scholar]
- Graff, P.; McIntyre, S. Using ecological attributes as criteria for the selection of plant species under three restoration scenarios. Austr. Ecol. 2014, 39, 907–917. [Google Scholar] [CrossRef]
- Krantz, D.H. A theory of magnitude estimation and cross-modality matching. J. Math. Psychol. 1972, 9, 168–199. [Google Scholar] [CrossRef]
- Golan, O.; Hansen, P.; Kaplan, G.; Tal, O. Health technology prioritization: Which criteria for prioritizing new technologies and what are their relative weights? Health Policy 2011, 102, 126–135. [Google Scholar] [CrossRef] [PubMed]
- Smith, C. Revealing Monetary Policy Preferences. Discussion Paper 2009/01. 2009. Available online: http://www.rbnz.govt.nz/research/discusspapers (accessed on 22 November 2018).
- Smith, K.F.; Fennessy, P.F. The use of conjoint analysis to determine the relative importance of specific traits as selection criteria for the improvement of perennial pasture species in Australia. Crop Pasture Sci. 2011, 62, 355–365. [Google Scholar] [CrossRef]
- Morgan-Davies, C.; Waterhouse, T. Future of the hills of Scotland: Stakeholders’ preferences for policy priorities. Land Use Policy 2010, 27, 387–398. [Google Scholar] [CrossRef]
- Arifin, B.; Swallow, B.M.; Suyanto, S.; Coe, R.D. A conjoint analysis of farmer preferences for community forestry contracts in the Sumber Jaya Watershed, Indonesia. Ecol. Econ. 2009, 68, 2040–2050. [Google Scholar] [CrossRef]
- Kelly, M.C.; Germain, R.H.; Stehman, S.V. Family forest owner preferences for forest conservation programs: A New York case study. For. Sci. 2015, 61, 597–603. [Google Scholar] [CrossRef]
- Aguilar, F.X. Investment preferences for wood-based energy initiatives in the US. Energy Policy 2009, 37, 2292–2299. [Google Scholar] [CrossRef]
- Hansen, P.; Ombler, F. A new method for scoring additive multi-attribute value models using pairwise rankings of alternatives. J. Multi-Crit. Decis. Anal. 2008, 15, 87–107. [Google Scholar] [CrossRef]
- Alriksson, S.; Öberg, T. Conjoint analysis for environmental evaluation—A review of methods and applications. Environ. Sci. Pollut. Res. 2008, 15, 244–257. [Google Scholar] [CrossRef]
- Chen, C. Design for the environment: A quality-based model for green product development. Manag. Sci. 2001, 47, 250–263. [Google Scholar] [CrossRef]
- Dennis, D.F. Analyzing public inputs to multiple objective decisions on national forests using conjoint analysis. For. Sci. 1998, 44, 421–428. [Google Scholar]
- Klosowski, R.; Stevens, T.; Kittredge, D.; Dennis, D. Economic incentives for coordinated management of forest land: A case study of southern New England. For Policy Econ 2001, 2, 29–38. [Google Scholar] [CrossRef]
- Nagashima, K.; Sands, R.; Whyte, A.G.D.; Bilek, E.M.; Nakagoshi, N. Forestry expansion and land-use patterns in the Nelson Region, New Zealand. Landsc. Ecol. 2001, 16, 719–729. [Google Scholar] [CrossRef]
- González Gómez, M.; Olschewski, R. Valuation of forest land uses in the coastal region of Spain and Portugal. Allg. For. Jagdztg. 2008, 179, 219–225. [Google Scholar]
- Kelly, M.C.; Germain, R.H.; Mack, S.A. Forest conservation programs and the landowners who prefer them: Profiling family forest owners in the New York City watershed. Land Use Policy 2016, 50, 17–28. [Google Scholar] [CrossRef]
- Serenari, C.; Peterson, M.N.; Moorman, C.E.; Cubbage, F.; Jervis, S. Application of Choice Experiments to Determine Stakeholder Preferences for Woody Biomass Harvesting Guidelines. J. Sustain. For. 2015, 34, 343–357. [Google Scholar] [CrossRef]
- Leszczyñski, K. Different evaluations of motor-manual wood harvesting processes on the basis of conjoint analysis. Croat. J. For. Eng. 2010, 32, 165–172. [Google Scholar]
- Evanson, T.; Hill, S. The Koller 602h Yarding System. Harvesting Technical Notes 2015, HTN08-01, 10p, Forest Growers Research. Available online: https://fgr.nz/documents/download/4692 (accessed on 29 November 2018).
- Harrill, H.; Visser, R. A Study of Breakout Forces in Cable Yarding. Harvesting Technical Notes 2017, HTN09–06, 6p, Forest Growers Research. Available online: https://fgr.nz/documents/download/5987 (accessed on 29 November 2018).
- Studier, D.D.; Binkley, V.W. Cable Logging Systems. Division of Timber Management; Forest Service, US Department of Agriculture: Portland, OR, USA, 1974; 205p.
- U.S. Forest Service. Cable Logging Operations. Available online: https://www.fs.fed.us/forestmanagement/equipment-catalog/cable.shtml (accessed on 22 November 2018).
| Attributes | Levels |
|---|---|
| (1) Slew/Swing capability |
|
| (2) Carriage/grapple type |
|
| (3) Carriage lifting capacity = breakout force |
|
| (4) Carrier |
|
| (5) Maximum extraction distance (skyline cable length) |
|
| (6) Carriage/grapple speed (outhaul) |
|
| (7) Price |
|
| Scenario | S01 | S02 | S03 | S04 | S05 | S06 | S07 | S08 | |
|---|---|---|---|---|---|---|---|---|---|
| Attribute | Level | ||||||||
| 1 | No | x | x | x | x | x | |||
| Yes | x | x | x | ||||||
| 2 | Mech. grapple | ||||||||
| Motorized slack-pulling | x | x | |||||||
| Motorized grapple | x | x | x | x | x | x | |||
| 3 | 4 tonnes | x | |||||||
| 7 tonnes | x | x | |||||||
| 10 tonnes | x | x | x | x | x | ||||
| 4 | Excavator | x | |||||||
| Tracks | x | x | |||||||
| Wheels | x | x | x | x | x | ||||
| 5 | 400 m | ||||||||
| 700 m | x | x | x | x | x | x | |||
| >1000 m | x | x | |||||||
| 6 | 5 m/s | x | |||||||
| 10 m/s | x | x | x | x | x | x | |||
| 15 m/s | x | ||||||||
| 7 | 1250 k€ | x | |||||||
| 1000 k€ | x | ||||||||
| 750 k€ | x | x | x | ||||||
| 500 k€ | x | x | x | ||||||
| Attribute | P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 | P9 | P10 | P11 | P12 | P13 | P14 | Median | Mean |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 7th | 7th | 7th | 4th | 7th | 7th | 6th | 3rd | 2nd | 1st | 1st | 1st | 5th | 4th | 4.50 | 4.429 |
| 2 | 6th | 5th | 6th | 6th | 2nd | 6th | 5th | 7th | 7th | 6th | 5th | 4th | 3rd | 6th | 6.00 | 5.321 |
| 3 | 2nd | 1st | 1st | 1st | 1st | 2nd | 2nd | 4th | 5th | 2nd | 3rd | 2nd | 1st | 3rd | 2.00 | 2.179 |
| 4 | 5th | 6th | 3rd | 7th | 6th | 5th | 7th | 6th | 6th | 7th | 7th | 7th | 7th | 7th | 6.50 | 6.143 |
| 5 | 4th | 4th | 2nd | 3rd | 3rd | 4th | 4th | 5th | 3rd | 5th | 6th | 5th | 2nd | 2nd | 4.00 | 3.714 |
| 6 | 3rd | 3rd | 5th | 2nd | 5th | 1st | 1st | 2nd | 4th | 3rd | 4th | 6th | 6th | 5th | 3.50 | 3.571 |
| 7 | 1st | 2nd | 4th | 5th | 4th | 3rd | 2nd | 1st | 1st | 4th | 2nd | 3rd | 3rd | 1st | 2.75 | 2.643 |
| Attribute | Attribute Weight (Sum to 1) | Level | Single Attribute Score (0–100) |
|---|---|---|---|
| Slew/swing capability | 0.106 | No | 0.0 |
| Yes | 100.0 | ||
| Carriage/grapple type | 0.084 | Mechanical grapple | 0.0 |
| Motorized slack-pulling carriage | 24.6 | ||
| Motorized grapple | 100.0 | ||
| Carriage lifting capacity (breakout force) | 0.250 | 4 tonnes | 0.0 |
| 7 tonnes | 61.8 | ||
| 10 tonnes | 100.0 | ||
| Carrier | 0.052 | Excavator based | 0.0 |
| Mobile yarder on tracks | 68.8 | ||
| Mobile yarder on wheels | 100.0 | ||
| Maximum extraction distance (skyline cable length) | 0.138 | 400 m | 0.0 |
| 700 m | 70.3 | ||
| >1000 m | 100.0 | ||
| Carriage/grapple speed (outhaul) | 0.160 | 5 m s−1 | 0.0 |
| 10 m s−1 | 70.7 | ||
| 15 m s−1 | 100.0 | ||
| Price | 0.210 | $1,875,000 (1,250,000 Euro) | 0.0 |
| $1,500,000 (1,000,000 Euro) | 41.1 | ||
| $1,125,000 (750,000 Euro) | 68.8 | ||
| $750,000 (500,000 Euro) | 100.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kühmaier, M.; Harrill, H.; Ghaffariyan, M.R.; Hofer, M.; Stampfer, K.; Brown, M.; Visser, R. Using Conjoint Analyses to Improve Cable Yarder Design Characteristics: An Austrian Yarder Case Study to Advance Cost-Effective Extraction. Forests 2019, 10, 165. https://doi.org/10.3390/f10020165
Kühmaier M, Harrill H, Ghaffariyan MR, Hofer M, Stampfer K, Brown M, Visser R. Using Conjoint Analyses to Improve Cable Yarder Design Characteristics: An Austrian Yarder Case Study to Advance Cost-Effective Extraction. Forests. 2019; 10(2):165. https://doi.org/10.3390/f10020165
Chicago/Turabian StyleKühmaier, Martin, Hunter Harrill, Mohammad Reza Ghaffariyan, Manfred Hofer, Karl Stampfer, Mark Brown, and Rien Visser. 2019. "Using Conjoint Analyses to Improve Cable Yarder Design Characteristics: An Austrian Yarder Case Study to Advance Cost-Effective Extraction" Forests 10, no. 2: 165. https://doi.org/10.3390/f10020165
APA StyleKühmaier, M., Harrill, H., Ghaffariyan, M. R., Hofer, M., Stampfer, K., Brown, M., & Visser, R. (2019). Using Conjoint Analyses to Improve Cable Yarder Design Characteristics: An Austrian Yarder Case Study to Advance Cost-Effective Extraction. Forests, 10(2), 165. https://doi.org/10.3390/f10020165