1. Introduction
It is often necessary in many scientific and engineering problems to find a root of a nonlinear equation. To solve this equation, we can use iterative methods. To give sufficient generality to the problem of approximating a solution of a nonlinear equation by iterative methods, we are concerned, in this work, with the problem of approximating a locally-unique solution of the equation , where F is a nonlinear operator defined on a nonempty open convex subset Ω of a Banach space X with values in a Banach space Y, so that many scientific and engineering problems can be written as a nonlinear equation in Banach spaces.
Newton’s method is probably the best-known iterative method, and it is well known that it converges quadratically. Newton’s method for solving scalar equations was extended to nonlinear equations in Banach spaces by Kantorovich in 1948 [
1] in the following way:
where
is the Fréchet derivative of the operator
F. For this reason, many authors refer to it as the Newton–Kantorovich method.
Kantorovich proved the semi-local convergence of Newton’s method under the hypothesis that the operator involved F is twice differentiable Fréchet with bounded second derivative:
There exists a constant , such that for .
It is well known that this condition can be replaced by a Lipschitz condition on the first derivative
of the operator involved [
2]:
There exists a constant , such that for .
In view of the applications, numerous papers have recently appeared where the convergence of the method is proven under different conditions for the derivatives of the operator
F. A known variant is the study of the convergence of the method under a Hölder condition on the first derivative [
3,
4,
5]:
There exist two constants and such that for .
In order to improve the accessibility of Newton’s method under the last condition, we can use different strategies that change the condition. In this work, we use a similar one as that used by Argyros in [
6] for the Lipschitz condition on the first derivative
, which consists of noticing that, as a consequence of the last condition being satisfied in Ω, we have, for the starting point
, that:
There exist two constants and , such that for ,
with
. We then say that
is center Hölder in
.
In this paper, we focus our attention on the analysis of the semi-local convergence of Sequence (
1), which is based on demanding the last condition to the initial approximation
and provides the so-called domain of parameters corresponding to the conditions required for the initial approximation that guarantee the convergence of Sequence (
1) to the solution
.
In this work, we carry out an analysis of the domain of parameters for Newton’s method under the last two conditions for
and use a technique based on recurrence relations. As a consequence, we improve the domains of parameters associated with the semi-local convergence result given for Newton’s method by Hérnández in [
4].
We prove in this paper that center conditions on the first derivative of the operator involved in the solution of nonlinear equations play an important role in the semi-local convergence of Newton’s method, since we can improve the accessibility of Newton’s method from them.
Throughout the paper, we denote and .
2. Preliminaries
The best-known semi-local convergence result for Newton’s method under a Hölder condition on the first derivative of the operator involved, when the technique of recurrence relations is used to prove it, is that given by Hernández in [
4], which is established under the following conditions:
- (A1)
There exists , for some , with and , where is the set of bounded linear operators from Y to X.
- (A2)
There exist two constants and , such that for .
- (A3)
If
is the unique zero of the auxiliary function:
in the interval
, it is satisfied that
and
, where
.
Theorem 1. (Theorem 2.1 of [4]) Let be a continuously-differentiable operator defined on a nonempty open convex domain Ω
of a Banach space X with values in a Banach space Y. Suppose that Conditions (A1)(A3) are satisfied. Then, Newton’s sequence, given by (1), converges to a solution of the equation ,
starting at ,
and ,
for all Note that Condition (A1), required for the initial approximation
, defines the parameters
β and
η, and Condition (A2), required for the operator
F, defines the parameter
K fixed for all point of Ω. Observe that, every point
, such that the operator
exists with
and
, has associated the pair
of the
-plane, where
and
. In addition, fixed
, if we consider the set:
we can observe that every point
z, such that its associated pair
belongs to
, can be chosen as the starting point for Newton’s method, so that the method converges to a solution
of the equation
when it starts at
z. The set
is then called the domain of parameters associated with Theorem 1 and can be drawn by choosing
,
and coloring the region of the
-plane whose points satisfy the condition
(namely,
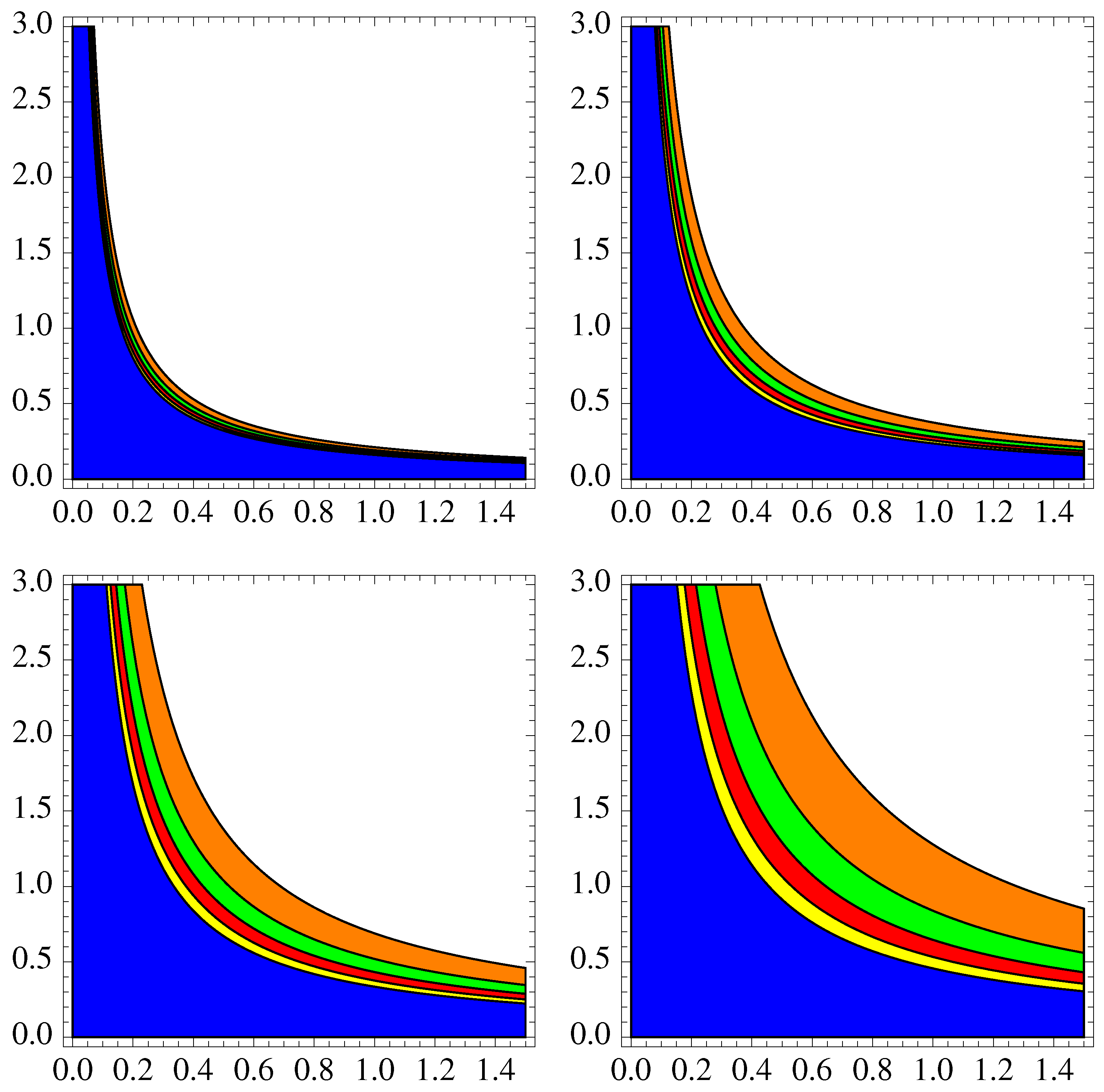
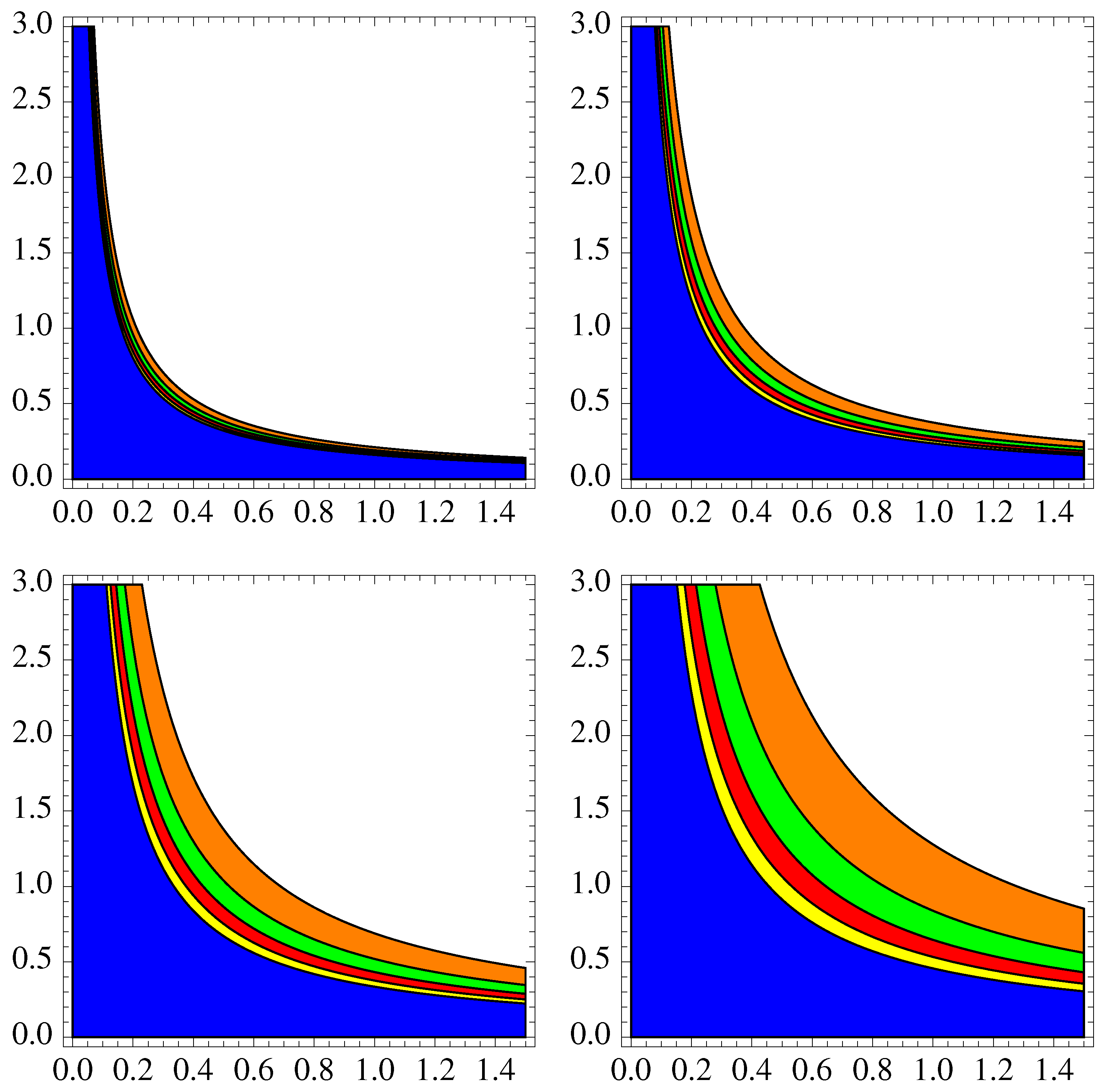
) of the Theorem 1. In
Figure 1, we see the domain of parameters
(blue region).
In relation to the above, we can think that the larger the size of the domain of parameters is, the more possibilities we have for choosing good starting points for Newton’s method. As a consequence, we are interested in being as big as possible, since this fact allows us to find a greater number of good starting points for Newton’s method.
3. Semi-Local Convergence of Newton’s Method
To improve the semi-local convergence of Newton’s method from increasing the domain of parameters
, we consider a procedure that consists of observing that, as a consequence of Condition (A2), once
is fixed, the condition:
is satisfied with
. Then, by considering jointly the parameters
K and
, we can relax the semi-local convergence conditions of Newton’s method given in Theorem 1 and obtain a larger domain of parameters.
Now, we present a semi-local convergence result for Newton’s method under Condition (A1) for the starting point
and Condition (A2) for the first derivative
. Note that Condition (
3) follows from Condition (A2) for the starting point
. In addition, we obtain a semi-local convergence result by combining Conditions (A2) and (
3), which allows increasing the domain of parameters
, so that the possibility of choosing good starting points for Newton’s method is increased, as we can see later in the applications. In particular, we study the convergence of Newton’s method to a solution of the equation
under certain conditions for the pair
. From some real parameters, a system of four recurrence relations is constructed in which two sequences of positive real numbers are involved. The convergence of Newton’s method is then guaranteed from them.
3.1. Auxiliary Scalar Sequences
From Conditions (A1)–(A2), we define
,
and
, where
. Now, we define
and:
Observe that we consider the case , since if , a trivial problem results, as the solution of the equation is .
Next, we prove the following four recurrence relations for Sequences (
1), (
4) and (
5):
provided that:
Then, by the Banach lemma on invertible operators, it follows that the operator
exists and:
After that, from Taylor’s series and Sequence (
1), we have:
Thus,
provided that
and
.
Now, we prove in the same way as above the following four recurrence relations for Sequences (
1), (
4) and (
5):
provided that:
In addition, we generalize the last recurrence relations to every point of Sequence (
1), so that we can guarantee that (
1) is a Cauchy sequence from them. For this, we analyze the scalar sequences defined in (
4) and (
5) in order to prove later the semi-local convergence of Sequence (
1). For this, it suffices to see that (
1) is a Cauchy sequence and (
10) and (
15) are true for all
and
with
. We begin by presenting a technical lemma.
Lemma 2 If and is such thatthen:
- (a)
the sequences and are strictly decreasing,
- (b)
and , for all .
If , then and for all .
Proof. We first consider the case in which
satisfies (
16). Item (a) is proven by mathematical induction on
n. As
, then
and
. If we now suppose that
and
, for all
, then:
As a result, the sequences and are strictly decreasing for all .
To see Item (b), we have
and
, for all
, by Item (a) and the conditions given in (
16).
Second, if , then , for all . Moreover, if , then we have , for all . □
3.2. Main Result
We now give a semi-local convergence result for Newton’s method from a modification of the convergence conditions required in Theorem 1. Therefore, we consider Conditions (A1), (A2) and the modification of Condition (A3) given by:
(A3b)
,
satisfies (
16) and
, where
.
Remember that Condition (
3) follows from Condition (A2) for the starting point
.
Theorem 3. Let be a continuously-differentiable operator defined on a nonempty open convex domain Ω
of a Banach space X with values in a Banach space Y. Suppose that Conditions (A1), (A2) and (A3b) are satisfied. Then, Newton’s sequence, given by (1), converges to a solution of the equation ,
starting at ,
and ,
for all .
proof. We begin by proving the following four items for Sequences (
1), (
4) and (
5) and
:
- (I)
There exists and ,
- (II)
,
- (III)
,
- (IV)
.
Observe that
, since
. Moreover, from (
6), (
7), (
8) and (
9), it follows that
. Furthermore, from (
11), (
12), (
13) and (
14), we have that Items (I), (II), (III) and (IV) hold for
. If we now suppose that Items (I), (II) and (III) are true for some
, it follows, by analogy to the case where
and induction, that Items (I), (II) and (III) also hold for
n. Notice that
for all
. Now, we prove (IV). Therefore,
and
. As
, then
for all
. Note that the conditions given in (
15) are satisfied for all
and
with
.
Next, we prove that
is a Cauchy sequence. For this, we follow an analogous procedure to the latter. Therefore, for
and
, we have:
Thus, is a Cauchy sequence.
After that, we prove that
is a solution of equation
. As
when
, if we take into account that:
and
is bounded, since:
it follows that
when
. As a consequence, we obtain
by the continuity of
F in
. □
4. Accessibility of Newton’s Method
The accessibility of an iterative method is analyzed from the set of possible starting points that guarantee the convergence of the iterative method when it starts at them. As we have indicated, the set of starting points that guarantees the convergence of the iterative method is related to the domain of parameters associated with a result of semi-local convergence of the iterative method.
Next, we study the domain of parameters associated with Theorem 1 and compare it with that associated with Theorem 3. To guarantee the convergence of Newton’s method from Theorem 3, the following three conditions must be satisfied:
where
.
From the auxiliary function given in (
2), the third condition of (
17) can be written as:
Observe that
is a non-increasing and convex function and
and
, for all
. Besides, if
, the unique zero of
in the interval
is
. If we now denote, for a fixed
, the unique zero of
in
by
and demand
, then Condition (
18) holds. Moreover, since
, the second condition of (
17) is satisfied. Now, as:
the second and third conditions of (
17) are satisfied, provided that:
After that, we write the first condition of (
17) as:
and take into account that the second and third conditions of (
17) are satisfied if:
since
and
. In addition, Condition (
20) is equivalent to:
Furthermore,
, so that
is a nondecreasing function for all
, and
and
. Therefore, Condition (
19) is satisfied if Condition (
20) holds, and we can then give the following result.
Corollary 4 Let be a continuously-differentiable operator defined on a nonempty open convex domain Ω
of a Banach space X with values in a Banach space Y. Suppose that (A1)–(A2) are satisfied. If Condition (20), where is the unique zero of function (2) in the interval ,
is satisfied and ,
where ,
,
and ,
then Newton’s sequence, given by (1), converges to a solution of the equation ,
starting at ,
and ,
for all From the last result, we can define the following domains of parameters:
where
,
and
is the unique zero of Function (
2) in the interval
.
Next, we compare the conditions required for the semi-local convergence of Newton’s method in Theorem 1 and Corollary 4. In
Figure 1, we see that
for
, so that we can guess that the smaller the quantity
is, the larger the domain of parameters is: orange for
, green for
, red for
and yellow for
. Note that, if
, the domain of parameters associated with Corollary 4,
, tends to be that obtained by Theorem 1 (blue region). As a consequence,
Figure 1.
Domains of parameters of Newton’s method associated with Theorem 1 (blue region) and Corollary 4 (orange for , green for , red for and yellow for ) for .
Figure 1.
Domains of parameters of Newton’s method associated with Theorem 1 (blue region) and Corollary 4 (orange for , green for , red for and yellow for ) for .
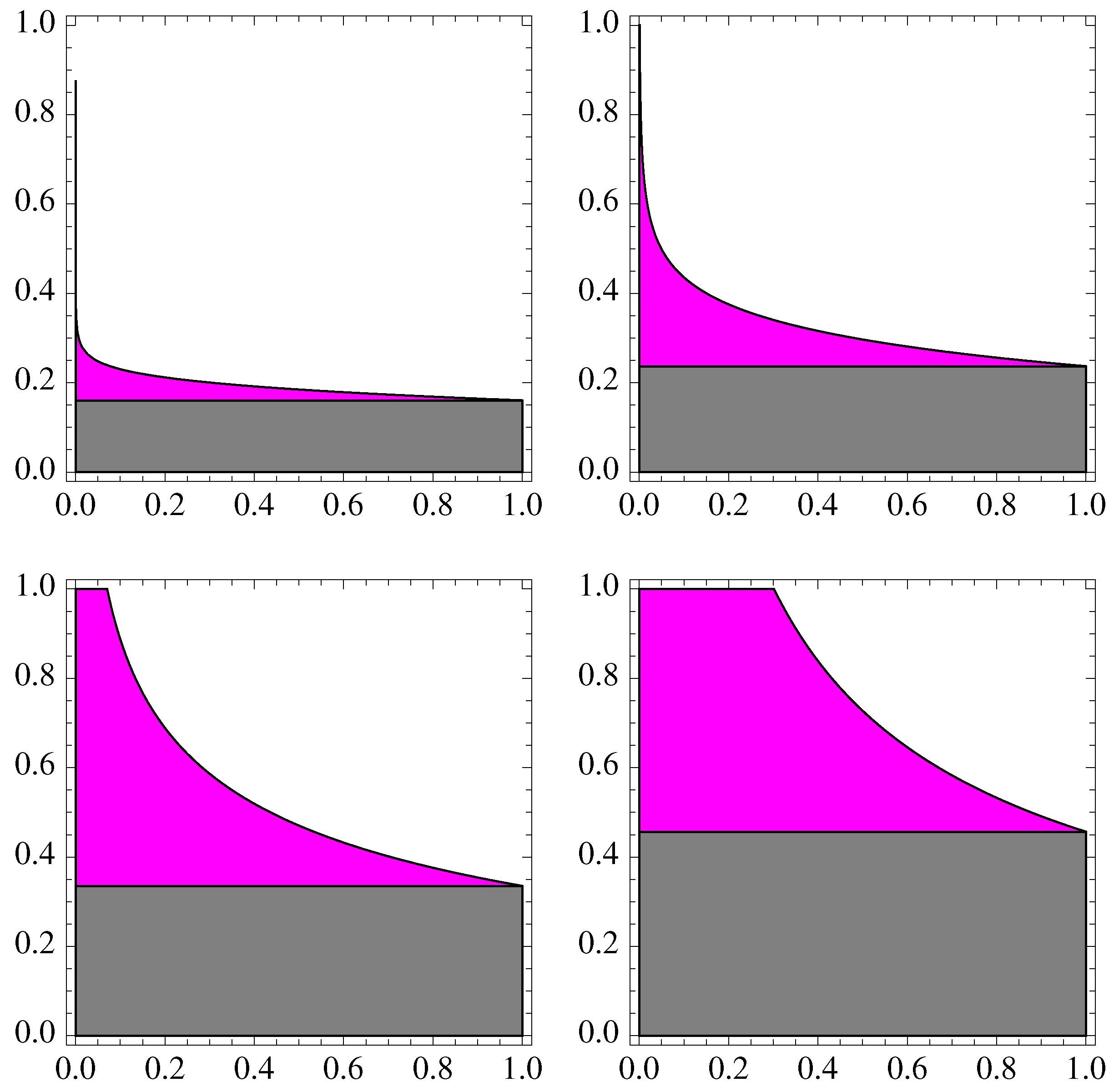
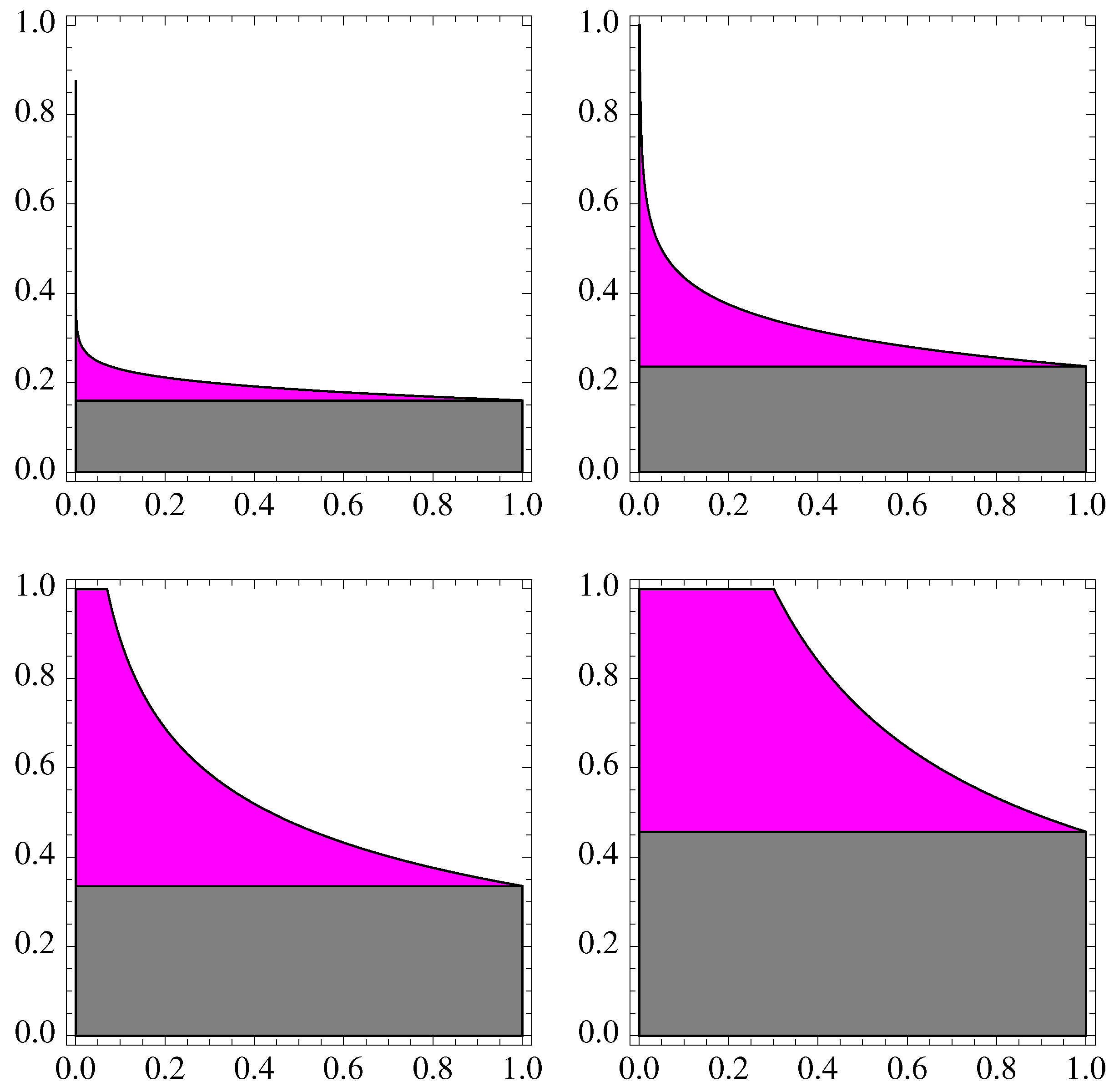
On the other hand, in
Figure 2, we observe the relationship between the domains of parameters associated with Theorem 1 (gray region) and Corollary 4 (magenta region) from the variability of
ε and for four different values of
p:
. As we can see, the domain associated with Corollary 4 is always larger, for all
, than that associated with Theorem 1.
Figure 2.
Domains of parameters of Newton’s method associated with Corollary 4 (magenta region) and Theorem 1 (gray region) for .
Figure 2.
Domains of parameters of Newton’s method associated with Corollary 4 (magenta region) and Theorem 1 (gray region) for .
In addition, we prove analytically in the following what we have just seen graphically. First, we prove that , for each and . For this, if , then , since and . Moreover, , since when and . Therefore, for each and .
Finally, we see that if with . Indeed, from and , we have and , since , so that and , and therefore .
To that end, we have proven the improvement obtained for the domain of parameters of Newton’s method with the help of the conditions of type (
3) that we have just shown in
Figure 2.
5. Application
Now, we illustrate all of that mentioned above with the following mildly nonlinear elliptic equation:
This type of equation is of interest in the theory of gas dynamics [
7]. An associated Dirichlet problem can be formulated as follows. Suppose that the equation is satisfied in the interior of the square
in
and that
is given and continuous on the boundary of the square ([
8]):
Our discussion focuses on the formulation of the finite difference equation for the elliptic boundary value Problems (
21)–(
22). The method of finite differences applied to this problem yields a finite system of equations. For general use, iterative techniques often represent the best approach to the solution of such finite systems of equations.
Specifically, central difference approximations for (
21) are used, so that Problems (
21)–(
22) are reduced to the problem of finding a real zero of a function
, namely a real solution
of a nonlinear system
with
m equations and
m unknowns. The common technique used to approximate
is the application of iterative methods. In this case, Newton’s method goes on being the most used iterative method for approximating
, since this method is one of the most efficient.
For Problems (
21)–(
22) in
, Equation (
21) can be approximated using central difference approximations for the spacial derivatives. Consider a grid with step size
in
x and
in
y defined over the region
D, so that
D is partitioned into a grid consisting of
rectangles with sides
and
. The mesh points
are given by:
Considering the following finite difference expressions to approximate the partial differentials:
Equation (
21) is approximated at each interior grid point
by the difference equation:
for
and
. The boundary conditions are:
If we now denote the approximate value of
as
, we obtain the difference equation:
for
and
, with:
Equation (
21) with the boundary conditions given in (
22) forms an
nonlinear system of equations. To set up the nonlinear system, the
interior grid points are labeled row-by-row from
to
starting from the left-bottom corner point. The resulting system is:
where:
,
,
I is the identity matrix in
,
,
and
is a vector formed from the boundary conditions (systems of this type are so-called mildly nonlinear systems).
If we denote the previous system by
, where:
then
is a linear operator, which is given by the matrix:
We now choose
and the infinity norm. In addition, the number of equations is
,
and
. Besides,
and:
In this case, we observe that a solution
of the system
with
F defined in (
23) satisfies:
where
and
, so that
, where
and
are the two positive real roots of the scalar equation
. Then, we can consider:
since
.
Moreover,
is the linear operator given by the matrix:
and:
where
. In addition,
Thus, , and .
If we choose the starting point
, we obtain
and
, so that the condition
of Theorem 1 is not satisfied, since
, where
is the unique zero of the corresponding auxiliary function given by (
2),
, in the interval
. As a consequence, we cannot use Theorem 1 to guarantee the convergence of Newton’s method for approximating a solution of the system
, where
F is defined in (
23).
However, we can guarantee the convergence of Newton’s method from Corollary 4, since Condition (
20) is satisfied:
with
. Therefore, we can then apply Newton’s method for approximating a solution of the system
with
F defined in (
23) and obtain the approximation given by the vector
that is shown in
Table 1, reached after four iterations with a tolerance
. In
Table 2, we show the errors
using the stopping criterion
. Notice that the vector shown in
Table 1 is a good approximation of the solution of the system, since
. See the sequence
in
Table 2.
Table 1.
Approximation of the solution
of
with
F given in (
23).
Table 1.
Approximation of the solution of with F given in (23).
| i | | i | | i | | i | |
|---|
| 1 | | 5 | | 9 | | 13 | |
| 2 | | 6 | | 10 | | 14 | |
| 3 | | 7 | | 11 | | 15 | |
| 4 | | 8 | | 12 | | 16 | |
Table 2.
Absolute errors obtained by Newton’s method and .
Table 2.
Absolute errors obtained by Newton’s method and .
| n | | |
|---|
| 0 | | |
| 1 | | |
| 2 | | |
| 3 | | |
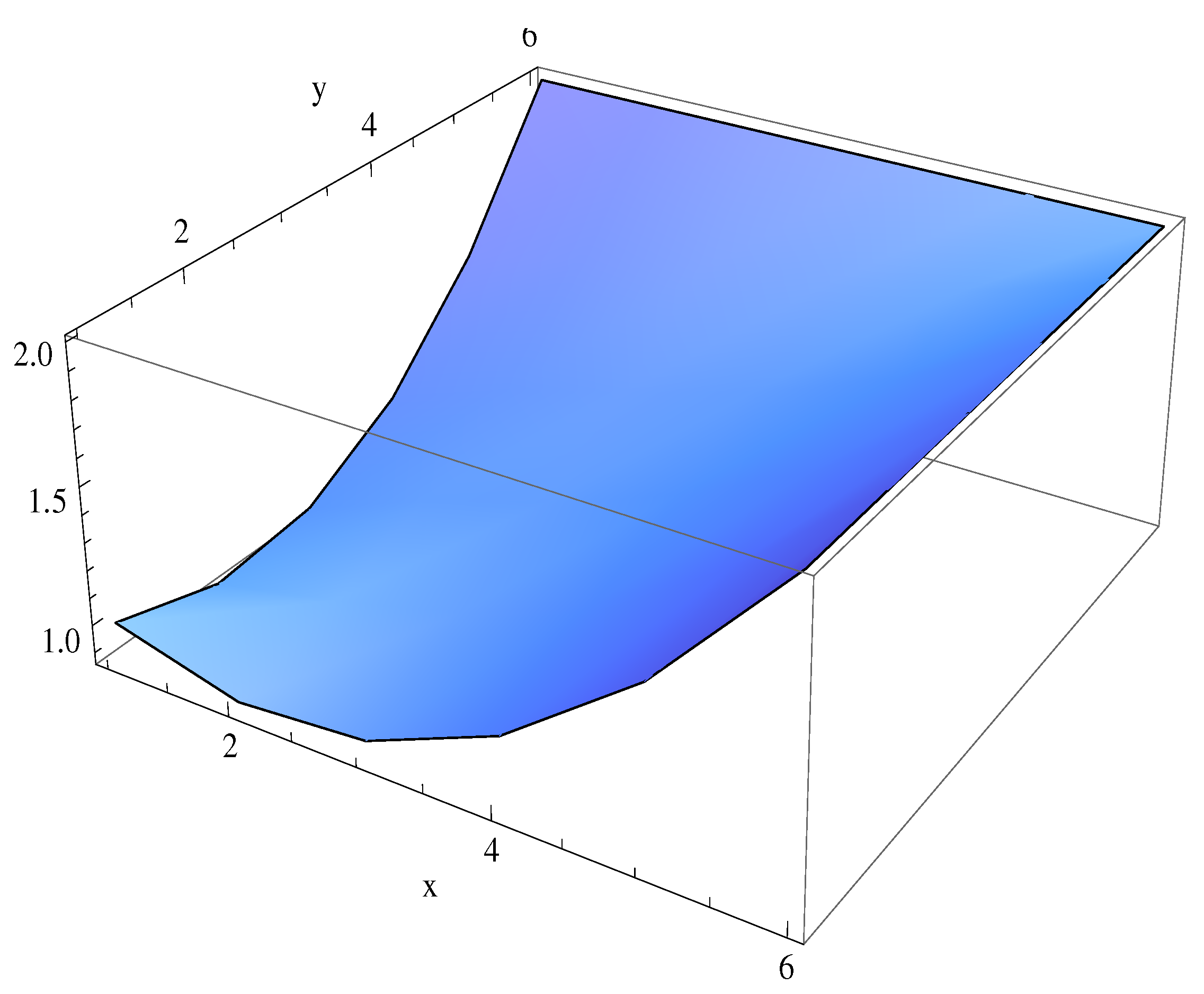
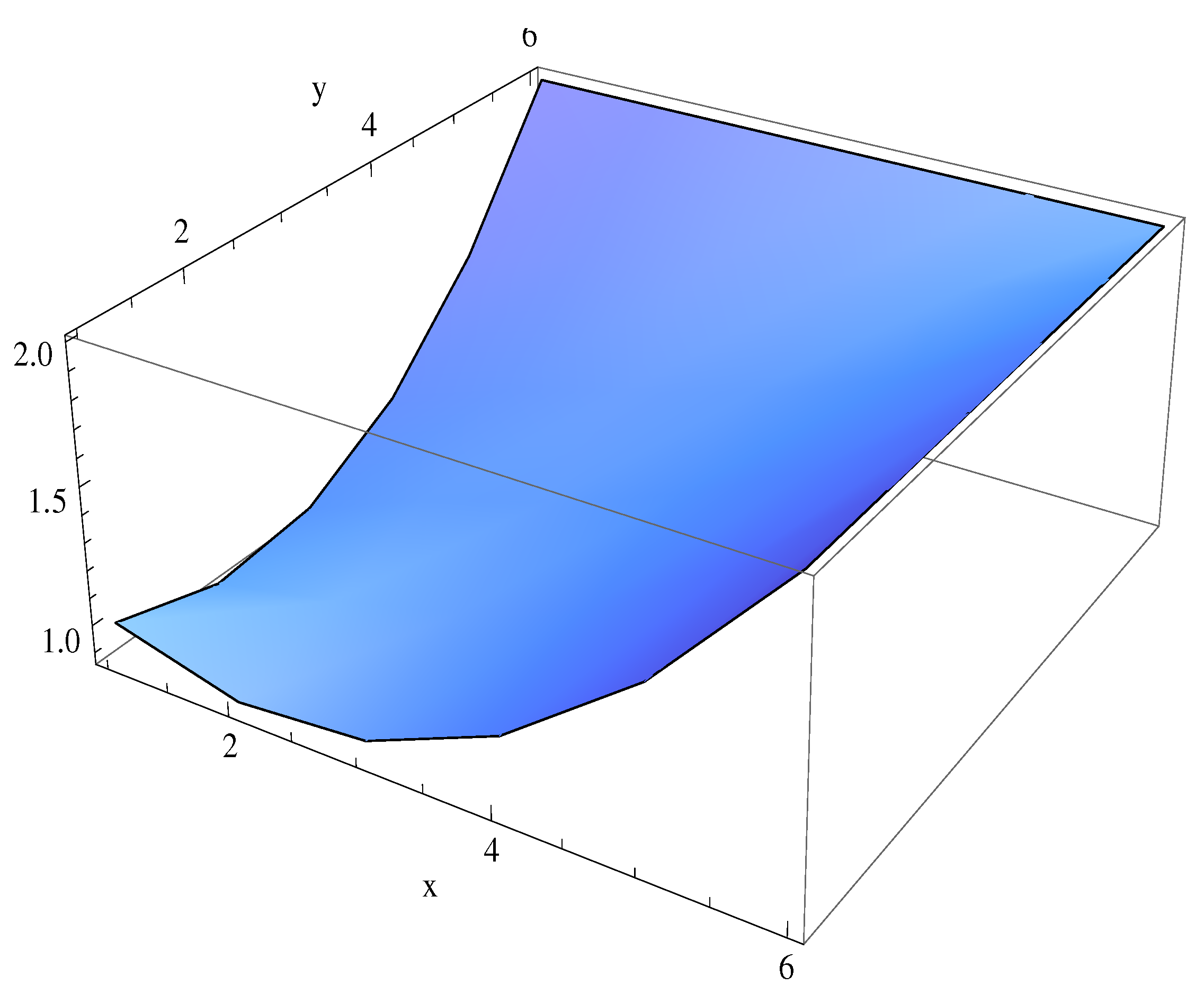
Finally, we note that if we interpolate the points of
Table 1 and take into account that the solution satisfies the boundary conditions given in (
22), we obtain the approximation of the numerical solution shown in
Figure 3.
Figure 3.
Approximated solution of Problems (
21)–(
22).
Figure 3.
Approximated solution of Problems (
21)–(
22).




{kind=link}
{kind=link}
{kind=link}