1. Introduction
Carbon capture, utilization, and storage (CCUS) is a process where a relatively pure stream of carbon dioxide from large point sources, such as fossil fuel power plants or industrial facilities (cement, iron, steel, etc.) is separated, treated, and transported to a long-term storage location. Geological carbon dioxide sequestration is considered a promising technology in CCUS for reducing carbon emissions into the atmosphere by injecting it into natural geological formations, such as saline aquifers, oil and gas reservoirs, and deep coal beds, and storing it permanently and safely there. To achieve carbon neutral, furthermore, we should also consider the negative emission scheme that captures CO
2 directly from the atmosphere and stores it in a geological formation. The security and the efficiency of CO
2 storage are ensured by several trapping mechanisms [
1], including structural and stratigraphic trapping geological storage [
2], capillary trapping [
3], solubility (dissolution) trapping [
4], and mineral precipitation (chemical reaction) [
5,
6].
The mechanisms of geological sequestration depend on the interplay between the geomechanical, thermal, hydraulic, and geochemical processes occurring as injected CO
2 migrates dissolve in formation fluid and react with formation bedrock. This is strongly influenced by several different factors, such as the injection fluid flow (e.g., injection rates, fluid topological characteristics), fluid properties (e.g., wetting or non-wetting, fluid–fluid interfacial tension [
7]), the characteristics of porous material (e.g., pore morphology [
8]), and wettability [
9]. Even though advanced imaging technologies have been able to provide detailed information on fluid distributions in pore spaces in experiments [
10,
11,
12], this process is time-consuming, costly, and effort-expensive. This is where mathematical modeling shines. Effective mathematical models can simulate a broad range of reservoir-relevant conditions within an acceptable period with the aid of the rapid improvement in computational resources [
6,
13,
14,
15].
In digital rock modeling, a clogging model is a computational approach used to study how fluid flow through porous rock formations becomes obstructed over time, due to the accumulation of particles, minerals, sediments, or other materials. This process is particularly relevant to applications such as geological sequestration, petroleum engineering, hydrogeology, and filtration systems. Clogging occurs when particles suspended in the fluid accumulate within the pore spaces, reducing permeability and impeding fluid flow. The clogging process involves two key components: particle transport and deposition mechanisms. Particle transport refers to the movement of particles within the fluid as they navigate through the pore spaces, while deposition mechanisms model how particles become trapped, stick to pore walls, or aggregate within pores. Common deposition mechanisms include mechanical trapping, surface adhesion, and bridging (where large particles span pores). By simulating clogging behavior, the model helps predict how porous formations evolve over time under fluid flow, allowing for improved reservoir management and a deeper understanding of long-term permeability changes in natural porous media.
Investigating the influence of the geometric structure of porous space is crucial for understanding fluid flow and clogging dynamics in digital rock models. The shape, size, and connectivity of the pores directly dictate how fluids move through the material, affecting both permeability and the likelihood of clogging. Complex pore geometries, characterized by varying pore throat sizes and irregular structures, create heterogeneous flow patterns, leading to regions of high or low flow velocity. These variations can significantly influence particle deposition and aggregation, which are primary drivers of clogging. By analyzing how the intricate geometry of the porous space impacts flow resistance and clog formation, it becomes possible to more accurately predict permeability reduction and develop optimized strategies to mitigate clogging in geological sequestration. This geometric insight is essential for lithology selection in CO2 storage technology, ensuring the long-term efficiency and stability of storage reservoirs.
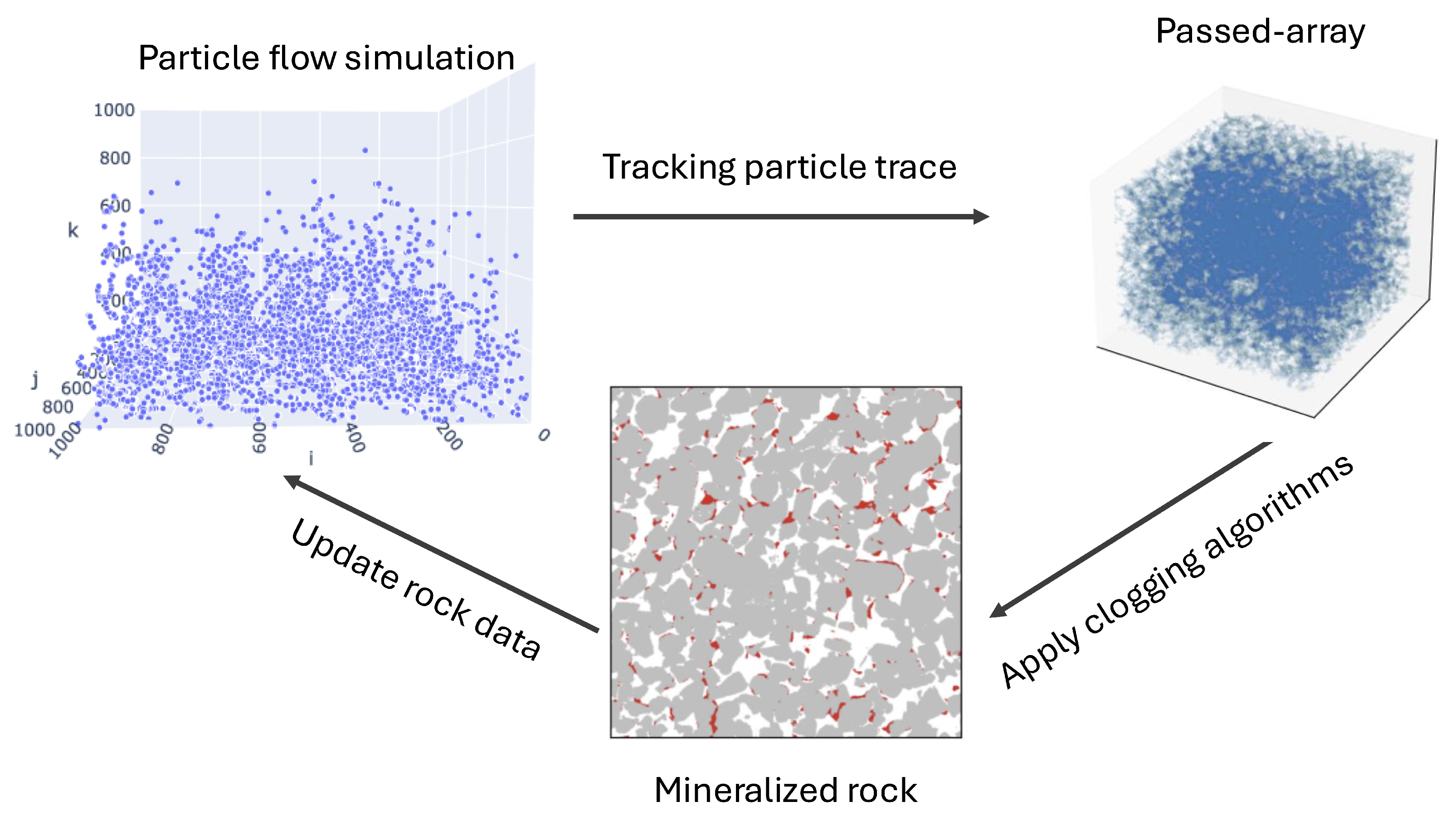
In this paper, we aimed to investigate the effect of the geometric structure of natural rock formations on fluid flow through pore spaces and the clogging process. We began by analyzing the geometrical characteristics of pore spaces in four types of natural rock models, examining factors such as porosity, pore size distribution, and the degree of pore voxel interconnection. We then proposed a random walk-based method to simulate the fluid flow dynamics of particles in complex pore structures, driven by pressure applied between the inlet and outlet surfaces. We proposed a probabilistic clogging model based on the particle transport algorithm, introducing two strategies: single-phase and multi-phase clogging. In single-phase clogging, porosity decreases monotonically as a function of deposition probability, whereas in multi-phase clogging, structural changes disrupt this monotonicity. High deposition probabilities lead to rapid clogging, narrowing capillaries and hindering particle transport. This method offers a valuable tool for selecting rock formations for geological sequestration. A schematic diagram representing the workflow is depicted in
Figure 1:
Theoretically, the fluid dynamics in porous materials can be modeled by different mathematical formulas, depending on the characteristics of the fluid and the porous media. For example, Darcy’s law governs the slow flow in a fully saturated porous medium, and Richard’s equation governs the flow in a variably saturated porous medium. Traditional computational fluid dynamics (CFD) methods [
16,
17], which numerically solve macroscopic properties conservation equations, are highly accurate for macroscopic systems and complex dynamics but require significant computational resources and are less intuitive for stochastic or microscopic systems. In the lattice Boltzmann method (LBM) [
13,
18], instead of solving Navier–Stokes equations directly, fluid density on a lattice is simulated with flow and collision (relaxation) processes. The LBM has been used widely to simulate single- and multi-phase flow behavior within the true pore geometry of porous media [
19,
20,
21,
22]. The LBM is a versatile mesoscopic approach that balances accuracy and computational cost but can struggle with extreme heterogeneity.
Unlike these CFD approaches, the random walk method models transport processes as the movement of individual particles or agents. This discrete and probabilistic approach offers new possibilities for simulating complex systems with inherent stochasticity. Diffusion is naturally represented through Brownian motion within the random walk framework, providing a direct and intuitive alternative to the discretization of partial differential equations (PDEs). Moreover, the method eliminates the need for computational grids, avoiding challenges such as mesh generation and grid resolution, particularly in heterogeneous structures like porous rocks. In other words, the random walk method operates directly on the digital rock models without requiring manual approximations. Notably, the concept of using random walk to simulate the clogging process within pore formations was first introduced in [
23]. However, this approach was previously implemented in a free, two-dimensional environment. To our knowledge, no comprehensive study of real three-dimensional natural porous rocks has been explored yet.
Like LBM, our random walk approach also effectively simulates the fluid flow within a real pore medium, thanks to its three advantages: all calculations are local, there is no need for complicated procedures for interface tracking, and the scheme is explicit. The main difference between our approach and the approach using LBM in [
13] is that in the mentioned work the LBM is used to simulate the displacement of a wetting liquid fluid, e.g., H
2O, by a non-wetting liquid fluid, e.g., CO
2. In our random walk approach, we cannot consider pressure information on fluid flow calculation directly. Therefore, we cannot evaluate fluid displacement characteristics that are available in the LBM approach [
24]. On the other hand, the random walk approach allowed us to easily model the clogging process (i.e., mineralization modeling) and use larger digital rock models, due to fewer computations compared to LBM. We simulated the particle fluid flow in the porous space of different types of rock formations, to choose the most geometrically favorable porous formation among the candidates for geological storage. We performed the simulations on three-dimensional natural porous rock samples (of
voxels), which were 15 times larger than those in [
13] (
), in the sense of the number of grid points.
Based on the particle transport results, we developed a stochastic clogging model to capture the probabilistic nature of the particle deposition and accumulation. The likelihood of a void voxel becoming clogged during fluid transport depends on the number of times that the void voxel has been visited by particles and on a predefined parameter known as the deposition probability. As the clogging process advances, fewer pathways remain open for fluid flow, leading to a gradual change in the geometric structure of the pore space. This, in turn, results in a progressive reduction in both the formation’s overall permeability and the efficiency of the fluid injection. The impact of deposition probability on clogging processes is quantified by modeling the decrease in porosity as a function of deposition probability, using the curve-fitting method. The coefficient of the fitted curves for different rock types highlights the potential of certain rocks for carbon storage, particularly from a geometric standpoint.
The outline of the paper is as follows.
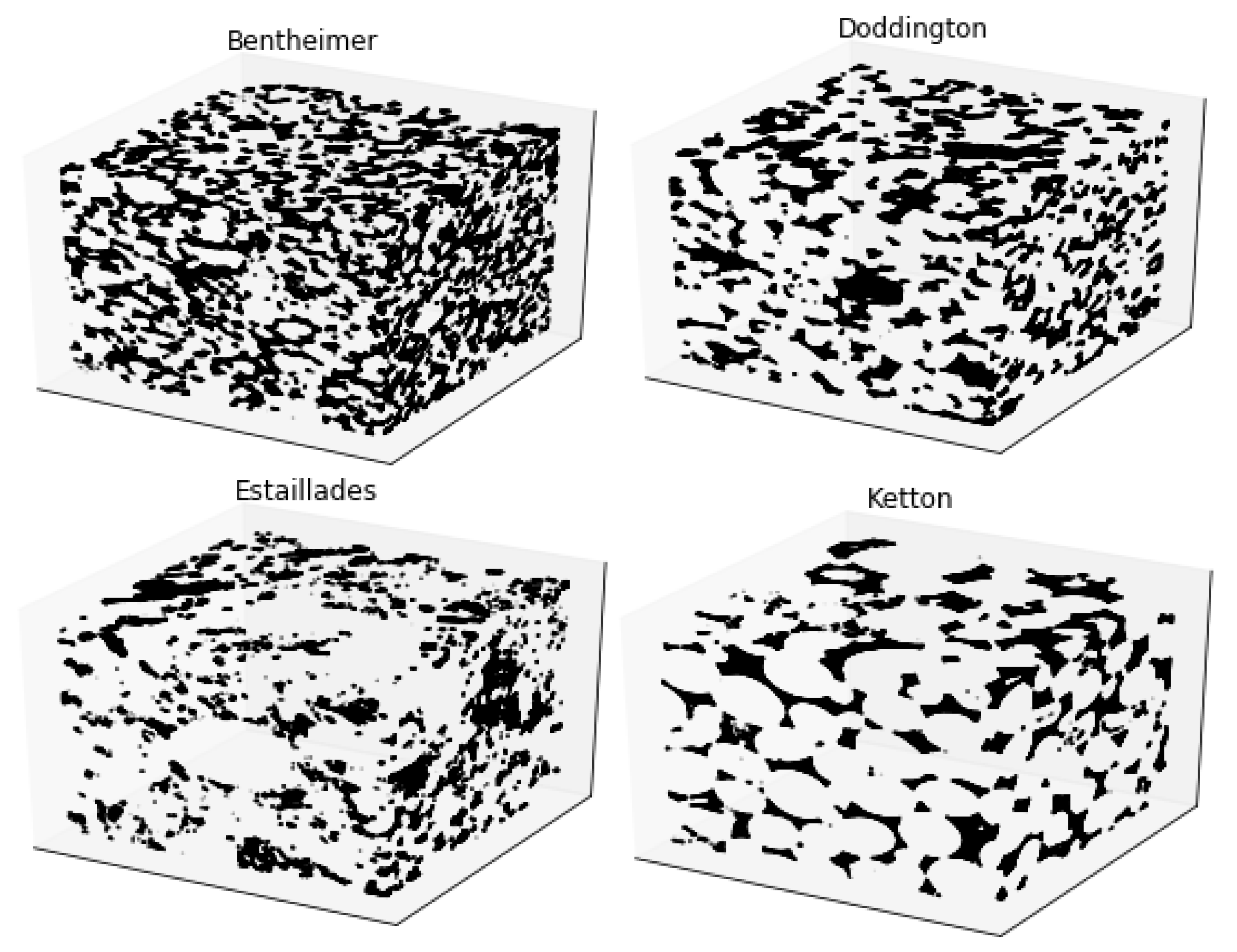
Section 2 describes the four digital rock models used in this study and introduces a graph-based representation approach to analyze the important geometrical properties of pore spaces—including porosity, degree of pore voxels, and connectivity—that are critical for transport in porous media. In
Section 3, we present the random walk rule for simulating particle movement within the pore spaces of rock formations under the pressure gradient imposed between the inlet and outlet surfaces.
Section 4 introduces our proposed stochastic clogging (pore-filling) model, which simulates particle accumulation in pore spaces over time.
Section 5 presents the numerical results and interpretation for the particle transport (
Section 5.1) and clogging models (
Section 5.2). The paper concludes with our conclusions and future perspective in
Section 6.
The simulations in this work were implemented in Python with the aid of several third-party libraries, such as Numpy [
25], Scipy [
26], Matplotlib [
27], and Porespy [
28].
3. Particle Flow Through Pore Space Governed by Random Walk
This section proposes a method to investigate the particle flow through the pore space of the rocks under the pressure gradient imposed between the inlet surface and the outlet surface. To make the embedded coordinate specific, we put the samples into a three-dimensional Euclidean space, so that the inlet surface is on the space , with four corners, at , , , and , and the outlet surface is on the space , with four corners, at , , , and .
3.1. Particle Injection
As initializing, a number, K, of particles are injected into the inlet surface of the rock sample under the imposed pressure gradient toward the direction from the inlet to the outlet surfaces, which we also called the injection direction. These particles will invade deeply into the pore space through the pore voxels on the inlet surface. In the simulation, the K pore voxels in the inlet surface were randomly chosen following the uniform distribution, with replacement, i.e., one pore voxel could be chosen several times to be the initial position of particles. Note that in our simulations we allowed multiple particles located at a single pore site, because the grid size was approximately times larger than the diameter of the particles.
The movement of the particles follows the random walk algorithm described in the following subsection. The inlet surface only allows the particle to go in, not to go out, and the injected particles can only escape through the outlet surface, as the other surfaces are made impermeable. In order to simulate the impermeability on these surfaces, we add an artificial grain layer adjacent to each of these surfaces outside of the rock sample. Because of this, the size of the rock in the simulation was instead of . With this technical trick, the lattice 6-neighbors are well-defined for each particle in the pore voxels, because the particle cannot go to the outermost layers where all the voxels are grains.
3.2. Random Walk Rule Governing Particle Movement
The random walk method is especially appropriate for describing particle movement in highly disordered and heterogeneous, large-scale media, such as the natural porous formation being studied in this work. The classical random walk particle schemes rely on the equivalence between the Langevin equation and the advection–dispersion equation [
30,
31]. This method usually requires high computational costs when there exists low permeability or low-velocity areas in the media when the particles remain trapped in low diffusion zones. The efficiency of the particle-tracking algorithm can be enhanced drastically by moving a particle over a fixed distance imposed by the computational mesh [
32,
33]. Variants of this methodology are
continuous time random walk (CTRW) and
time domain random walk (TDRW). It has been shown that the discretized advection–dispersion equation and the TDRW are equivalent [
34,
35]. The TDRW in general moves particles on a lattice with jumps of fixed distance, with the direction and transition time being determined by the local advection and dispersion.
In this work, we formulated a TDRW model to describe the particle flow within the porous media under the pressure imposed between the inlet and the outlet surface in the presence of the clogging process. Therefore, the model introduced here works in time-dependent random environments, because the geometric structure of the pore space evolves during the deposition process in a stochastic way. The proposed method, though simple, is very powerful, and it has the potential to be applied to a variety of complex large-scale disordered phenomena arising from physics, biology, and engineering; for example, the propagation of heat or diffusion of matter through a medium that is highly irregular, due to defects, impurities, or fluctuation.
At a given time instant
t, suppose that a particle
x is at the position
, with the increasing of the third coordinate
representing the injection direction from the inlet to the outlet. In this case, we can identify
. The particle can either stay still or move to one of its pore neighbors defined in Equations (
1) and (
2).
Only when
, with ∅ representing the empty set, i.e.,
has degree 0, will the particle
x stay still. Otherwise, it will randomly move to one of its pore neighbors in
in the next time instant
, with the following transition probability:
where
Here,
v is called
velocity, which models the pressure gradient, and
d is the
dispersion. Both
v and
d are chosen to be non-negative. The positive velocity
v ensures that the particles have more tendency to move in the injection direction than in any other direction. In this sense, the parameter
v can
indirectly characterize for the strength of the pressure. The probabilistic jumping rule specified in (
3) and (
4) models both the advective and diffusive terms. Moreover, the transition probability is spatial-dependent, due to the heterogeneity of the pore structure. From the above construction, the transition probability
of the particle is specified as in
Table 1:
There are several key assumptions commonly made in the random walk method: independent particle motion, uniform medium properties, discretization of time and space, neglect of convection or external forces, simplified boundary conditions, and neglect of particle size and shape. Each assumption has its advantages and disadvantages; see
Table 2. For example, recall that the classical random walk relies on the Langevin equation, which describes the movement of the non-interacting particle due to advection and uncorrelated random velocity. Thanks to this independence, we can parallelize our algorithms; that is, we can run a large number of particle movements simultaneously, which offers a remarkable advantage in terms of computational time.
The above limitations are acceptable for the purpose of characterizing the geometric structure of porous formation. For future research, several approaches could help address these limitations and improve the accuracy of CO2 penetration prediction. These include introducing rules for particle–particle, particle–medium interactions such as collision dynamics and hydrodynamic forces, hybrid approaches that combine the random walk method with continuum models to address multiscale and anisotropic effects, and comparing the predictions of the random walk model with experimental data or more detailed simulation, to identify when its assumptions hold.
4. Clogging Models
Clogging refers to the process in which particles suspended in the fluid (e.g., fine particles, minerals, or sediments) accumulate in the pore spaces, reducing permeability and impeding fluid flow. This process can be driven by size, shape of particle, concentration, and the velocity of the fluid. In this section, we propose a new clogging (pore-filling) model to elucidate the effect of geometry structure on the fluid flow through the pore space of media.
In the literature, there are a few works that propose clogging models, e.g., [
6,
36,
37,
38]. Keehm et al. determined the four classes of pore-filling mechanisms: grain–pore boundary, low-flux, high-flux, and random filling. This pore-filling mechanism is controlled by fluid rates. In [
6], the authors introduced the CT image threshold adjustment model and the reactive transport clogging model to estimate the pore structure changing due to carbonate precipitation. The latter model uses chemical reaction theory to evaluate the local volume variation of the precipitate, with the assumption of CO
2 equilibrium conditions; that is, the authors considered the divalent cations’ concentration that is derived by solving the reactive transport model.
In this work, to elucidate the role of geometric structure, we address the dynamics of particle deposition—the spontaneous attachment of particles to surfaces by means of the probabilistic clogging model.
At the initialization step, a total of
K particles are injected into the inlet surface of the rock samples. They invade through the pore spaces in the rock formation, under the pressure imposed between the inlet and the outlet surface, following the random walk rule introduced in
Section 3.2. During the particle flow process, we construct the passed array, as described below.
The passed array is a one-dimensional array of length equal to the total number of pore and grain voxels in the rock sample, which keeps track of the number of times the particles have passed through each voxel during the random walk process.
Because the length of the passed array is the same as the flattened rock sample, it also keeps track of the corresponding voxels’ positions in the rock sample. As the particles cannot move to the grain voxels’ positions, the elements corresponding to grain voxels on the passed array are always 0 s. By utilizing this, we reduce the memory usage by storing the passed array in a sparse matrix.
At some given time instants, the pore voxels will become grain voxels, with the probability given by
where
is the
probability of deposition, and where
n is the number of times that particles have passed through the corresponding void position. The value of
n is specified by the corresponding element in the passed array. It is easy to verify that the expression in (
5) satisfies the requirements of a probability measure as
for any
and that
and
tends to 1 as
n approaches infinity.
To understand the mathematical meaning of the expression (
5), let us consider a sequence of
i Bernoulli experiments
, which is also called a Bernoulli process. The Bernoulli trials
take either the value 1 if the experiment succeeds with probability
q or 0 if the experiment fails with probability
. Then, the probability of the output
, i.e., that the experiment fails on all first
trials and succeeds at the last trial
i, is
. Similarly, each element in the finite series (
5) represents the probability of a pore voxel being precipitated at the time instant when the number of times a particle visits that position is exactly
i and failing to be precipitated at all
previously visited times. Therefore, the probability of a pore voxel that has been visited
n times being precipitated is the sum of all the probabilities that it is precipitated at any time
during the random walk process. This is equivalent to 1 minus the probability that the pore voxel fails to be precipitated
n times (the right-hand side in (
5)). In the following, we propose two clogging algorithms: single-phase and multi-phase.
4.1. Single-Phase Clogging
On the single-phase strategy, after the fluid flow simulations finish, either when the prescribed number of the maximum simulation steps is reached or when all the particles have escaped from the outlet surfaces, we apply the deposition rule (
5) once to update the states of the voxels on the rock, where some of the pore voxels change to grain voxels, making the porosity decrease. This procedure is described in Algorithm 1:
| Algorithm 1 Single-phase clogging |
- 1:
procedure Single-phase clogging() Input: pore rock sample Parameter setting: - 2:
K: number of injected particles, - 3:
v: velocity, - 4:
d: dispersion, - 5:
N: maximum number of random walk, - 6:
q: probability of deposition. Initialize positions of K particles by uniformly random choosing from pore voxels on the inlet surface. Initialize the passed array whose elements are all 0s. - 7:
while and there exist particles in the pore space do - 8:
- 9:
Update particle positions according to ( 3) and ( 4). - 10:
Update passed array. - 11:
Remove particles that have reached the outlet surface. - 12:
end while Perform deposition based on passed array according to ( 5). Update rock sample. return Updated rock data. - 13:
end procedure
|
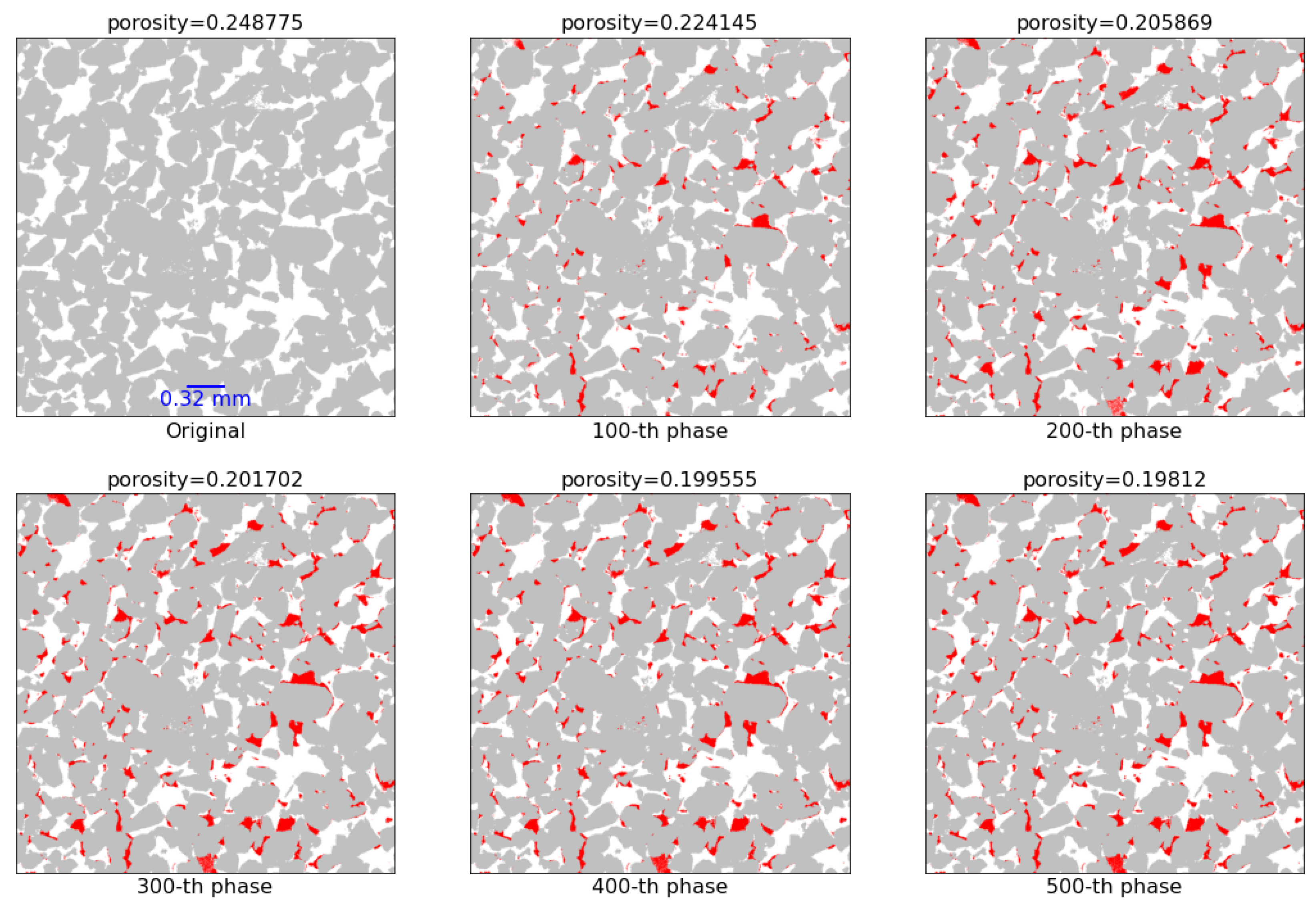
4.2. Multi-Phase Clogging
Multi-phase clogging is a consecutive sequence of single-phase clogging. In parameter setting, we predetermine the number of phases to perform. At the end of each phase, some pore voxels become grain voxels because of the deposition; therefore, the porosity and the geometric structure vary. During the simulation process, we use a one-dimensional array, called the position array, to keep track of the position of the particles injected into the pore spaces, and we remove the element from the array when some particles escape from the outlet surface. In addition, at the end of each phase i, the particles that are presented at the precipitated pore voxels will also be removed from the array.
The updated rock data after the deposition process at the end of phase i will be used as the domain for the simulation in phase . We count the number of particles that are still present in the pore space of this new rock (the length of the array containing the positions of particles in the last step); then, we inject new particles to the inlet surface of the new rock, if necessary, to ensure that the number of particles in the position array at the beginning of each phase is exactly K (predefined parameter). This is a variant of the periodic boundary condition, which ensures the preservation of the number of particles at the beginning of each phase. The passed array is also updated at the end of each phase.
The iteration process finishes when the predefined number of phases is reached. The multi-phase clogging procedure is summarized in Algorithm 2:
| Algorithm 2 Multi-phase clogging |
- 1:
procedure Multi-phase clogging() Input: pore rock sample Parameter setting: - 2:
K: number of injected particles, - 3:
v: velocity, - 4:
d: dispersion, - 5:
N: maximum number of random walks, - 6:
q: probability of deposition, - 7:
M: number of phases. Initialize positions of K particles by uniformly random choosing from pore voxels on the inlet surface. Initialize the passed array whose elements are all 0s, and initialize the position array as empty. - 8:
for m = 1:M do - 9:
if Number of particles within the pore space is less than K and there exist pore voxels on the inlet surface then - 10:
Inject more particles to the inlet space, such that the number of particles within the pore space is exactly K. - 11:
Update position array. - 12:
end if - 13:
- 14:
while and there are particles within the pore spaces do - 15:
- 16:
Update position array according to ( 3) and ( 4). - 17:
Remove particles that have reached the outer surface. - 18:
Update passed array. - 19:
end while - 20:
Perform deposition based on passed array according to ( 5). - 21:
Remove particles at the position of precipitated points. - 22:
Assign values 0s to the elements in passed array corresponding to the precipitated pore voxels. - 23:
Update pore rock. - 24:
end for return Updated rock data. - 25:
end procedure
|
6. Conclusions and Future Perspective
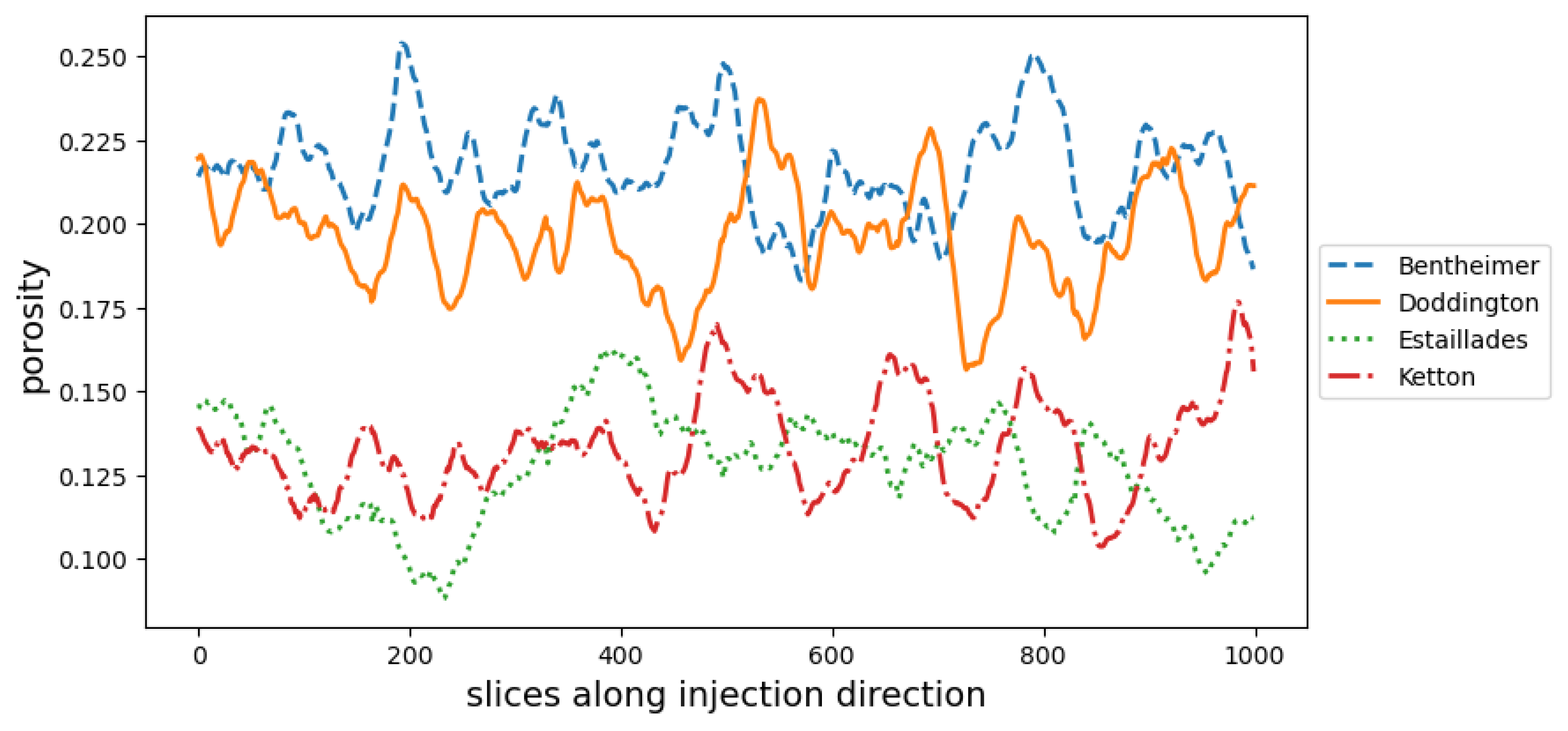
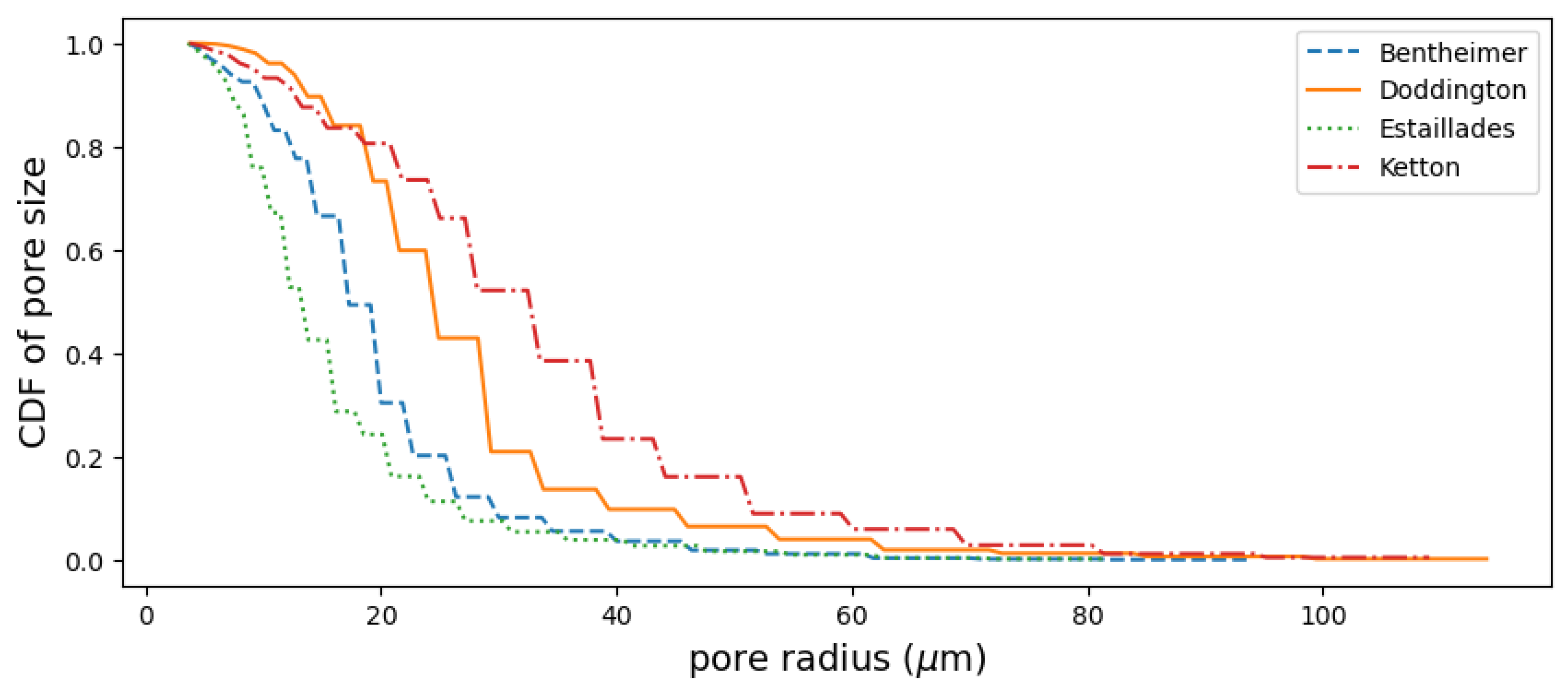
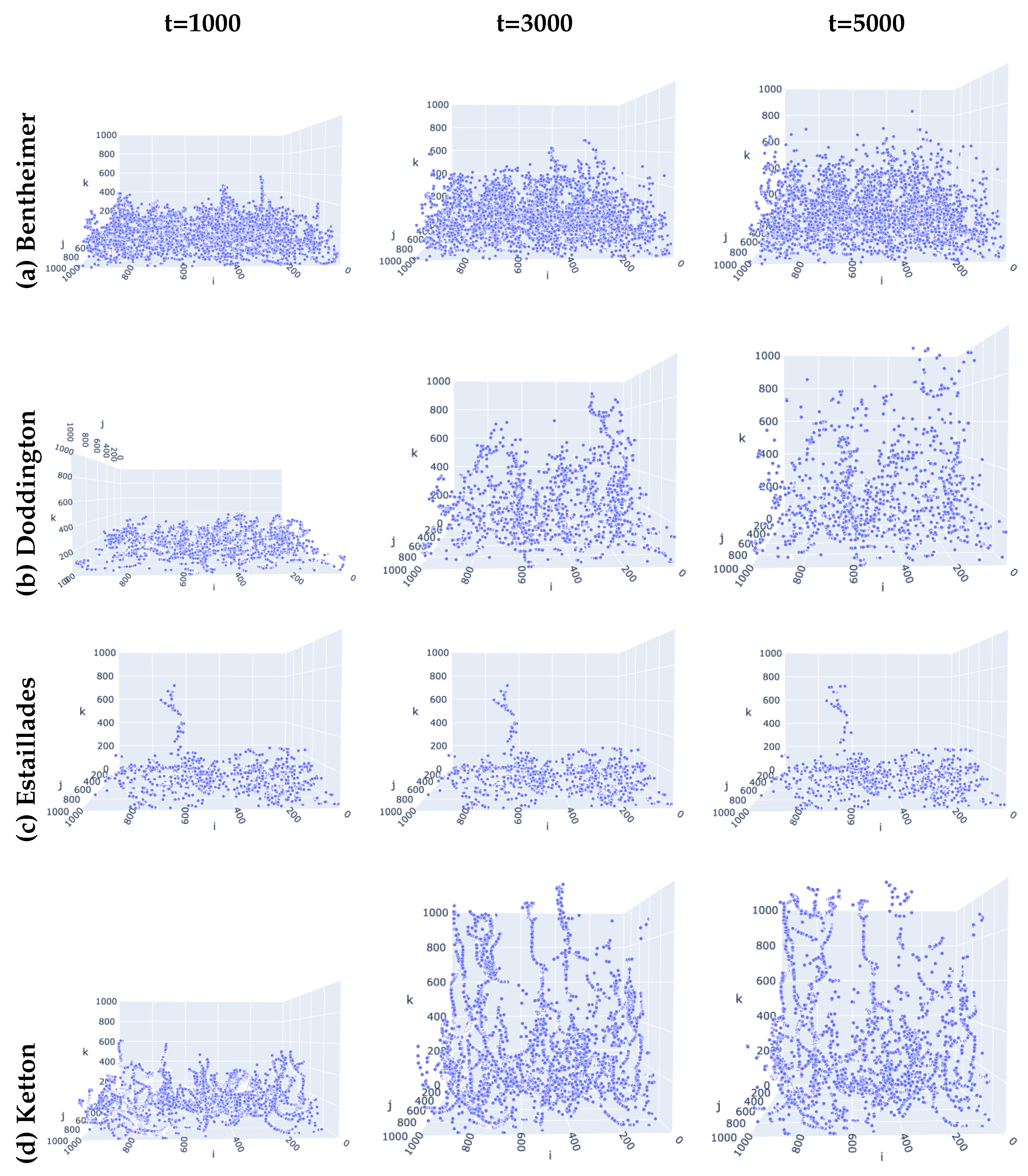
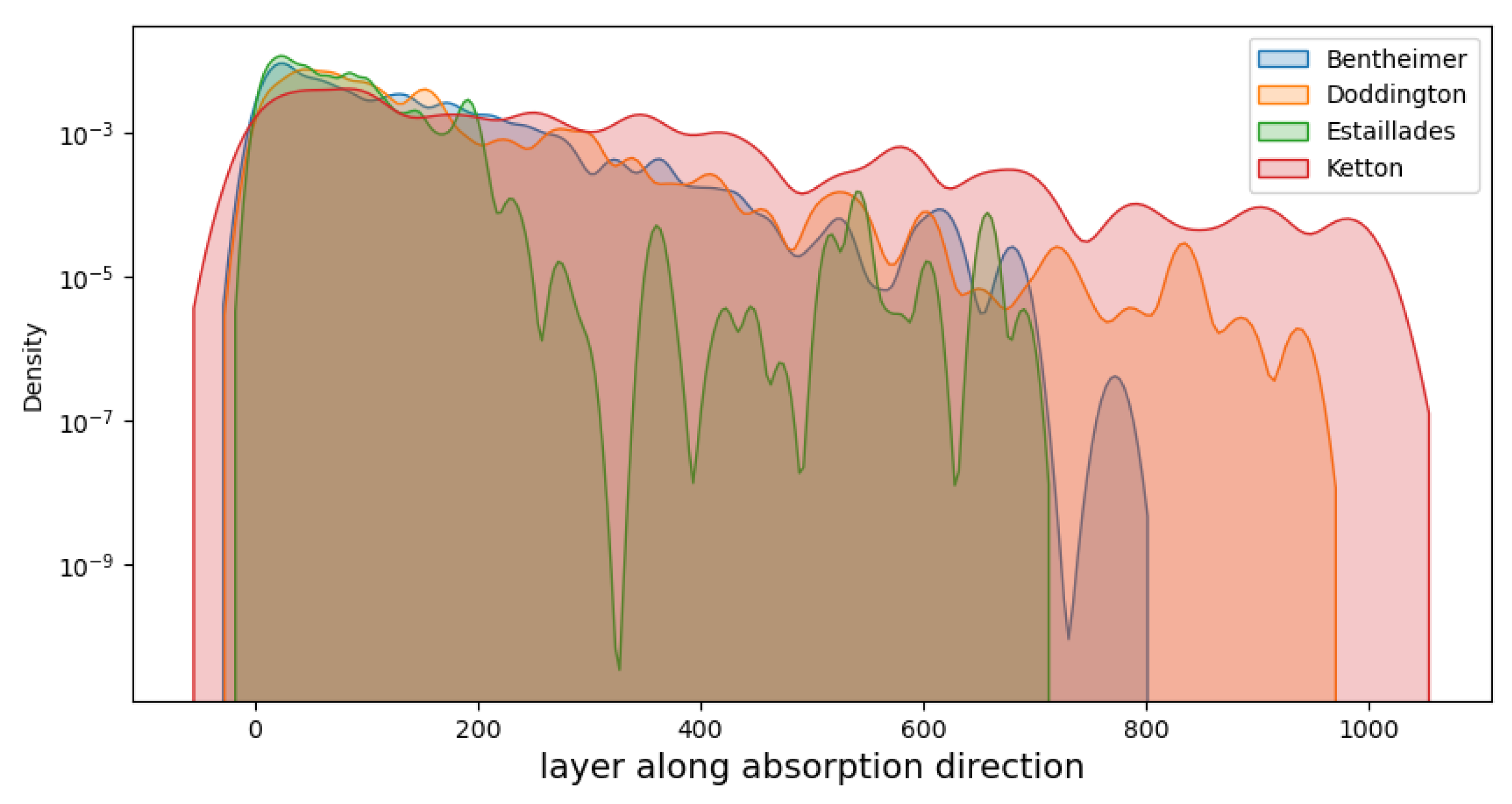
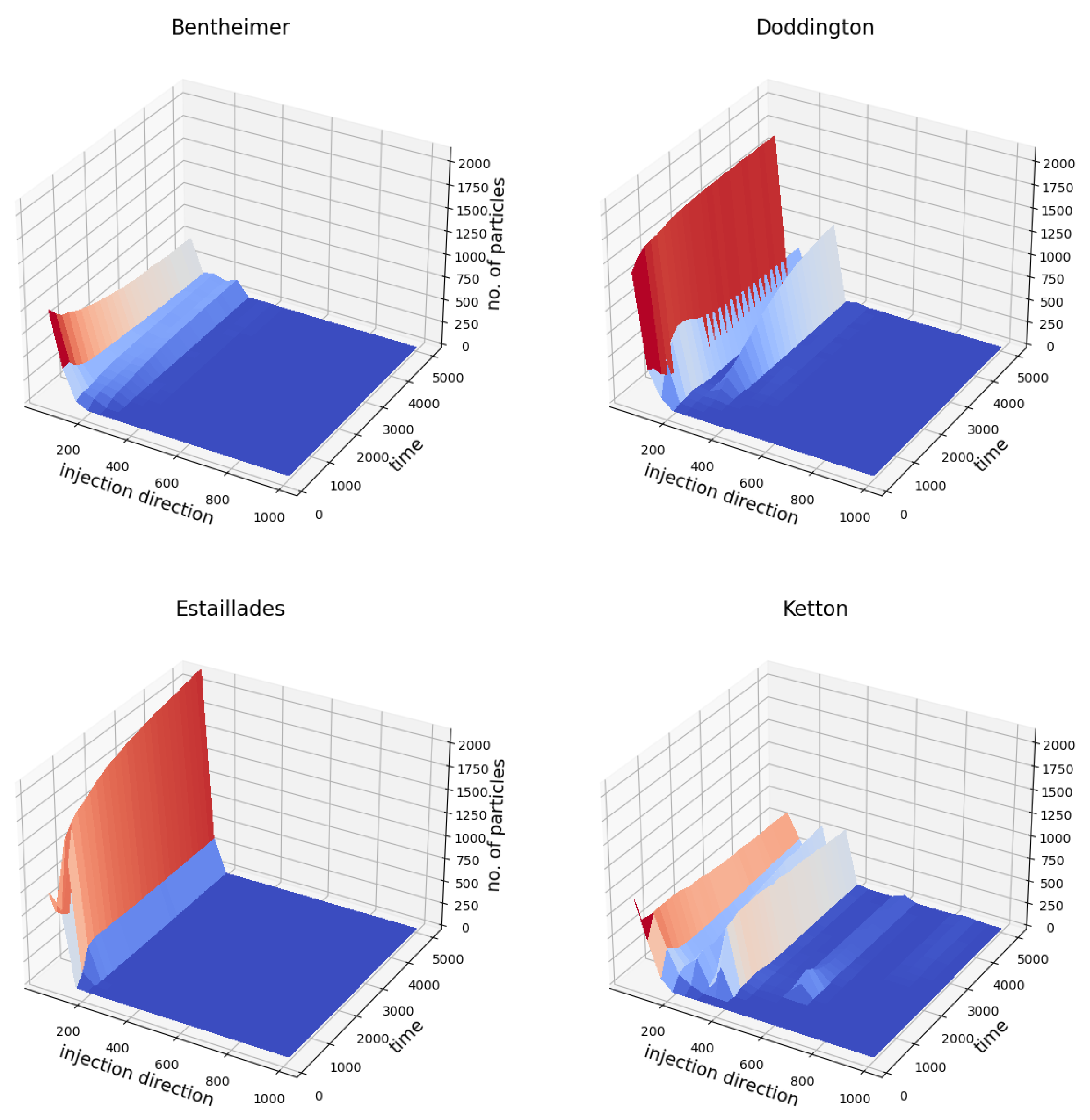
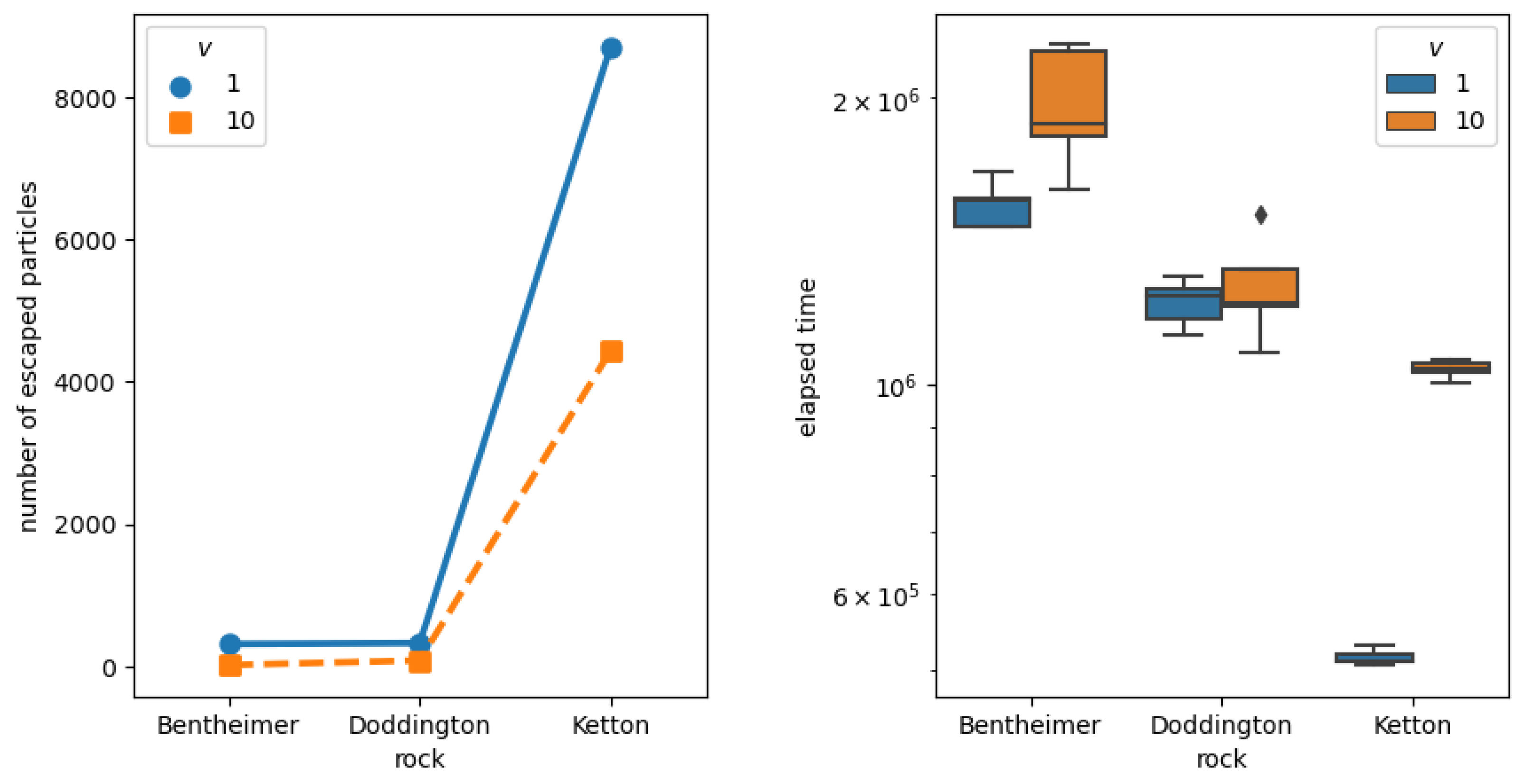
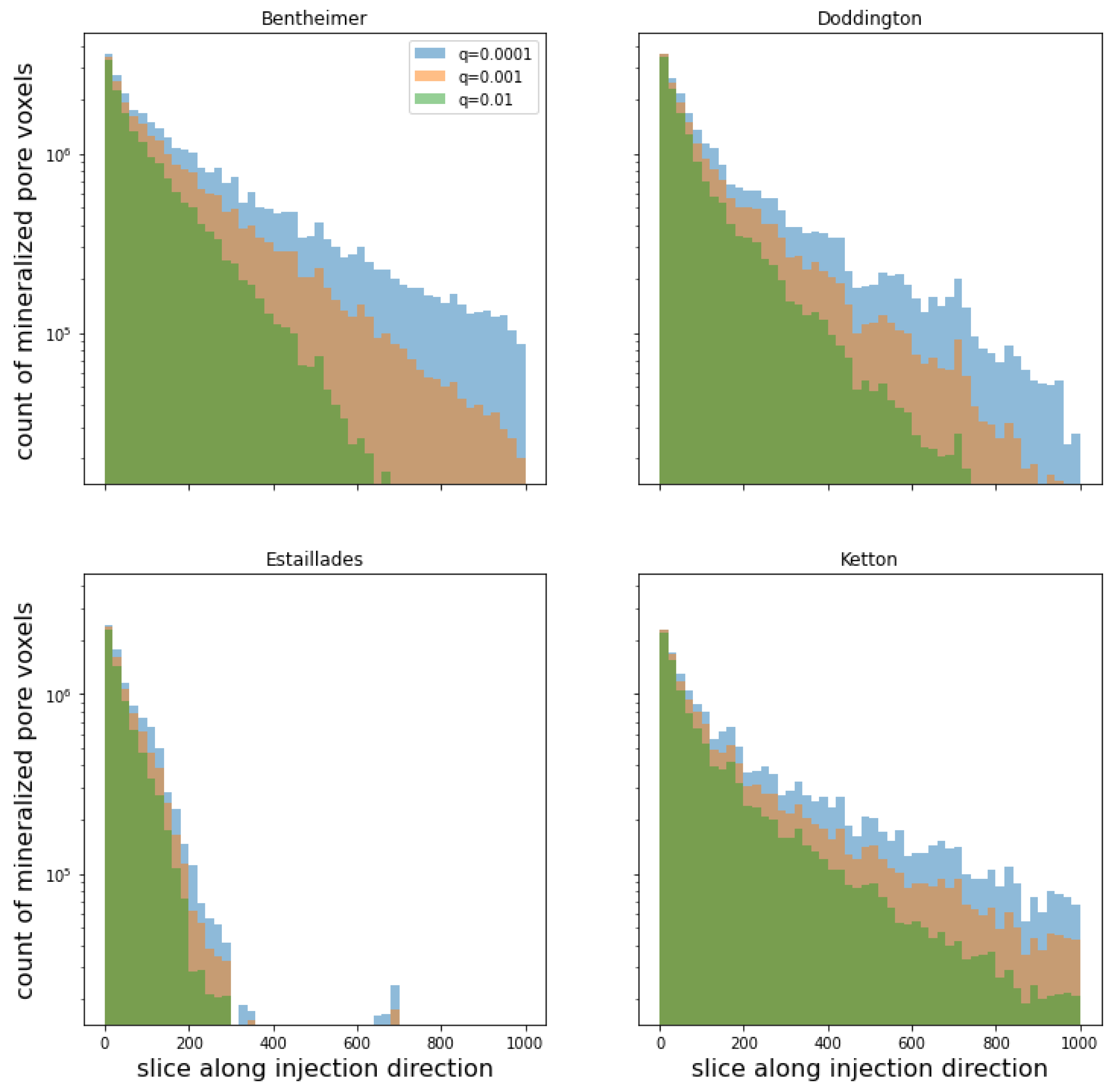
The time domain random walk method is applied to describe the movement of particles within complex, highly disordered, and heterogeneous pore spaces of porous rock formations under the pressure gradient imposed between the inlet and the outlet surfaces. The scheme is explicit and can be easily upscaled for large volumes of porous media samples. Based on numerical simulations, we investigated the particle fluid flow dynamics in four different types of natural porous rocks: Bentheimer, Doddington, Estaillades, and Ketton. The particle fluid flow dynamics were strongly affected by the geometric structure of the rocks. Ketton had the highest permeability among the four samples, despite having the lowest porosity.
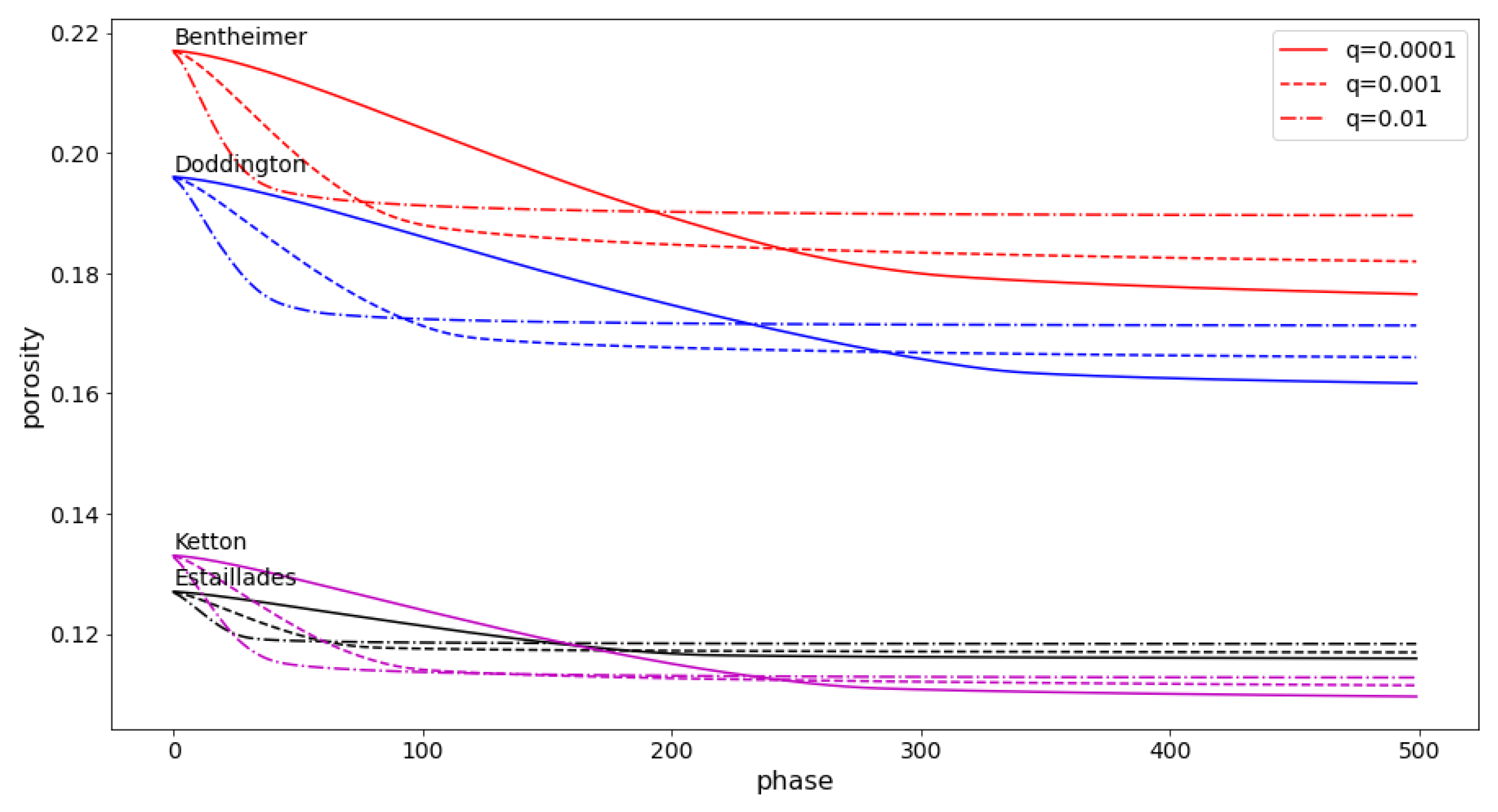
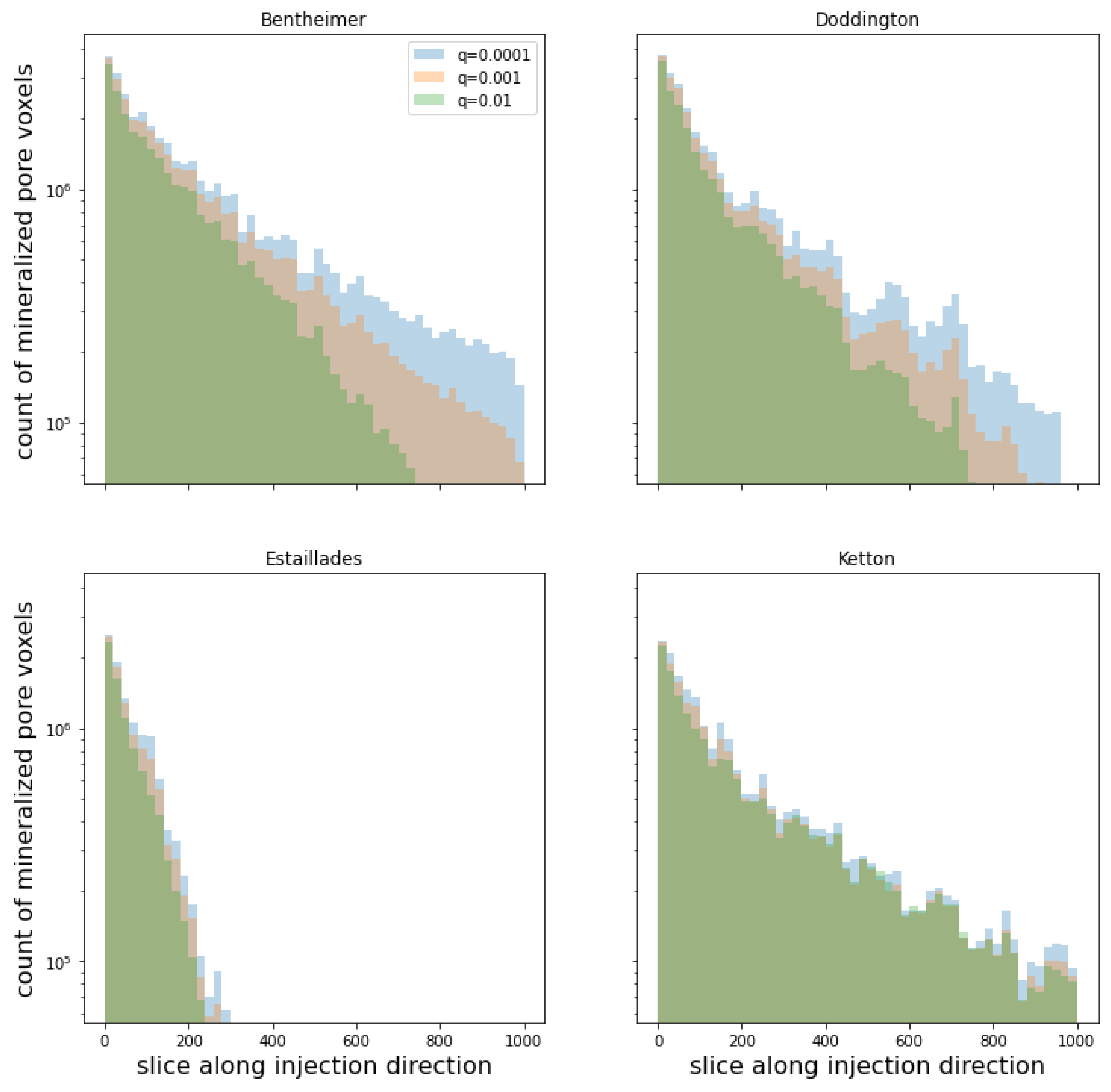
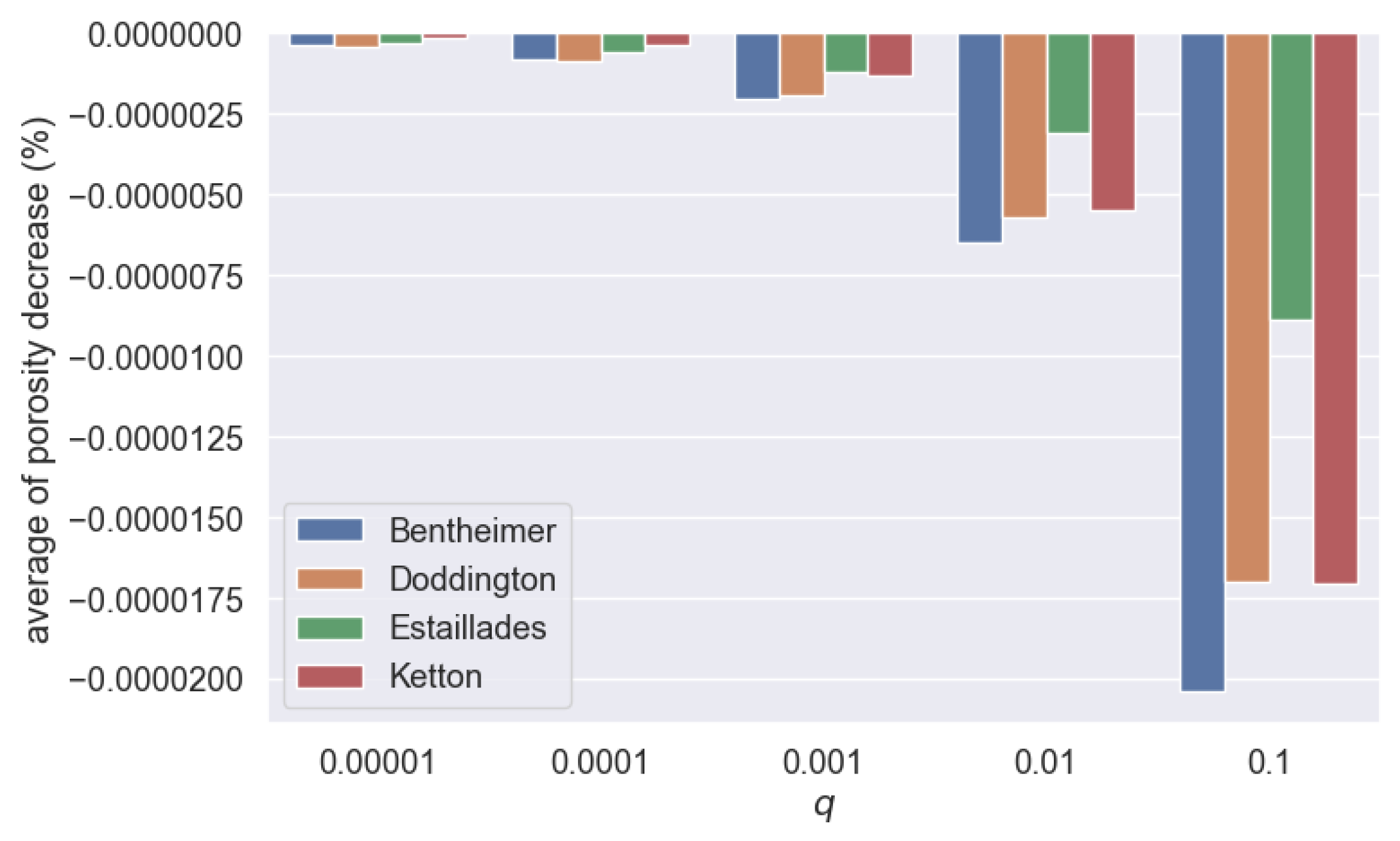
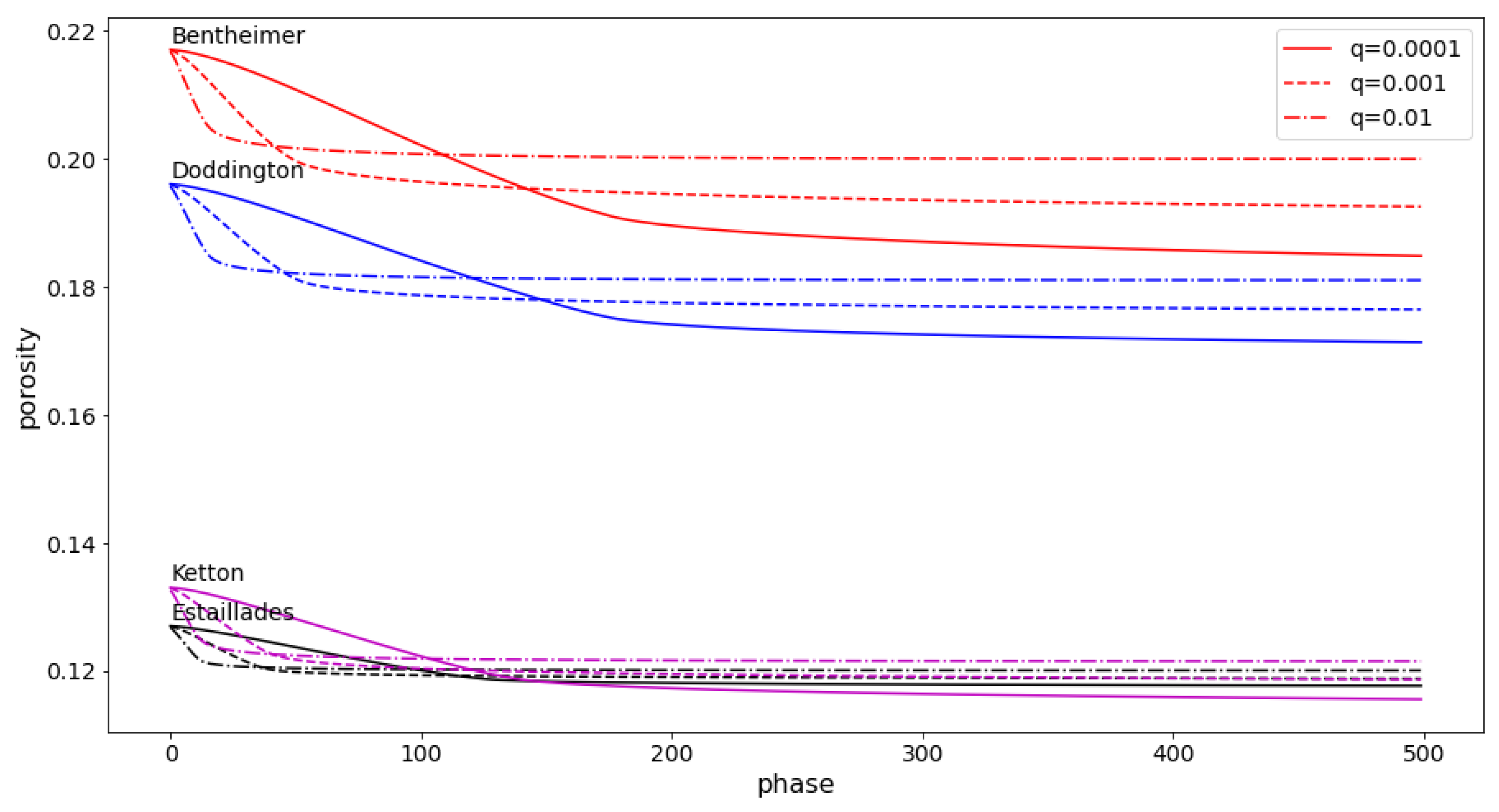
Based on the particle transport algorithm, we propose a probabilistic clogging model in two strategies: single- and multi-phase clogging. In the former strategy, the porosity decrease can be approximated as a monotonically non-increasing function of the deposition probability in the form of exponential functions. This monotonicity is no longer valid in the latter strategy, because the geometric structure changes at every phase. When some large probability of deposition is chosen, the fast clogging narrows the capillaries, preventing the particles from invading easily in the injection direction. Our simulation results suggest that Bentheimer, Doddington, and Ketton could potentially be used as rock formations for carbon dioxide storage, while Estaillades could not. The method proposed in this study could be useful in lithology selection for geological sequestration.
The simulation study revealed that the velocity v and deposition probability q are critical parameters that characterize the efficiency of the clogging process. While v models the pressure gradient imposed between the inlet and the outlet surface, q models the speed of chemical reactions between CO2 and alkaline earth metals. Fine-tuning these factors helps increase the efficiency of geological sequestration technology, and the optimal values can be obtained from the simulation studies.
Once the target lithology has been chosen, the next step is to elucidate these formations’ trapping mechanisms. Mahmood et al. [
39] utilized the kinetic Monte Carlo method to model the carbonation front development in calcium–silicate–hydrate microstructures under varying temperatures and then combine the simulation data with experimental results from Fourier-transform infrared spectroscopy (FTIR) and impedance spectroscopy, so as to provide insights into the carbonation process at different depths and temperatures. Learning from Mahmood et al.’s idea, in our future work we will incorporate the kinetic barrier of the chemical processes during the mineralized process, to define the rate constant; that is, the state-to-state transition rates in the RW algorithm through Arrhenius formulas. The simulation results will then be combined with atomic simulation and experimental data to help understand the complicated trapping mechanisms in the chosen lithology. Another important issue that needs to be addressed is the modeling of fracture systems. It is critical to access the risk of injected CO
2 leakage due to natural fault or fractures as well as the presence of abandoned oil/gas wells. This problem involves both fluid flow through aquifers and intensive fluid flow through fractures simultaneously. A hybrid approach incorporating the random walk model with a continuum has the potential to solving this challenging problem. For more details about the importance and challenges of this issue, as well as current numerical methods to solve these systems, we refer the interested reader to [
40,
41].




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}