

Numerical Study of Viscoplastic Flows Using a Multigrid Initialization Algorithm



Abstract
1. Introduction
2. Numerical Methodology
2.1. Governing Equations
2.2. Discretization of the Equations
2.3. Pressure-Velocity Coupling
2.4. Incompressible Flow Solver: SIMPLE Algorithm
2.5. Multigrid Procedure
2.5.1. Two-Grid Algorithm
- Initialize the set of primitive variables and impose boundary conditions;
- At the finer multigrid level, execute few Simple iterations on the system (27);
- Restrict the approximate solutions and the correponding residuals ;
- Compute the coarse grid correction using Equation (30);
- Check for convergence; if the solution is converged, prolongate back the velocities and pressures into the fine level;
- The algorithm returns to Step 2 to perform smoothing iterations on the fine grid;
- If the desirable residual reduction is not achieved yet, repeat Steps 2–6.
- The primitive variables are initialized as:
- Few relaxation sweeps on the momentum equations are performed to obtain the approximate solutions and .
- The cell-face velocities are computed according to the momentum interpolation method. For the east interface of the volume cell, we can write:where and denote the underlying terms in (33) and (34), respectively. Analogous expressions for the other face velocities and can be derived in a similar manner.
- The face velocities are substituted into the mass continuity equation to derive the coarse-grid pressure correction equation. The pressure correction equation is p″, given by:where
- Pressure equation (37) is solved, and the related pressure and velocity corrections are updated through .
- The algorithm returns to Step 2 to perform additional SIMPLE iterations.
| Algorithm 1: MG_cycle() |
 |
| Algorithm 2: Main algorithm |
 |
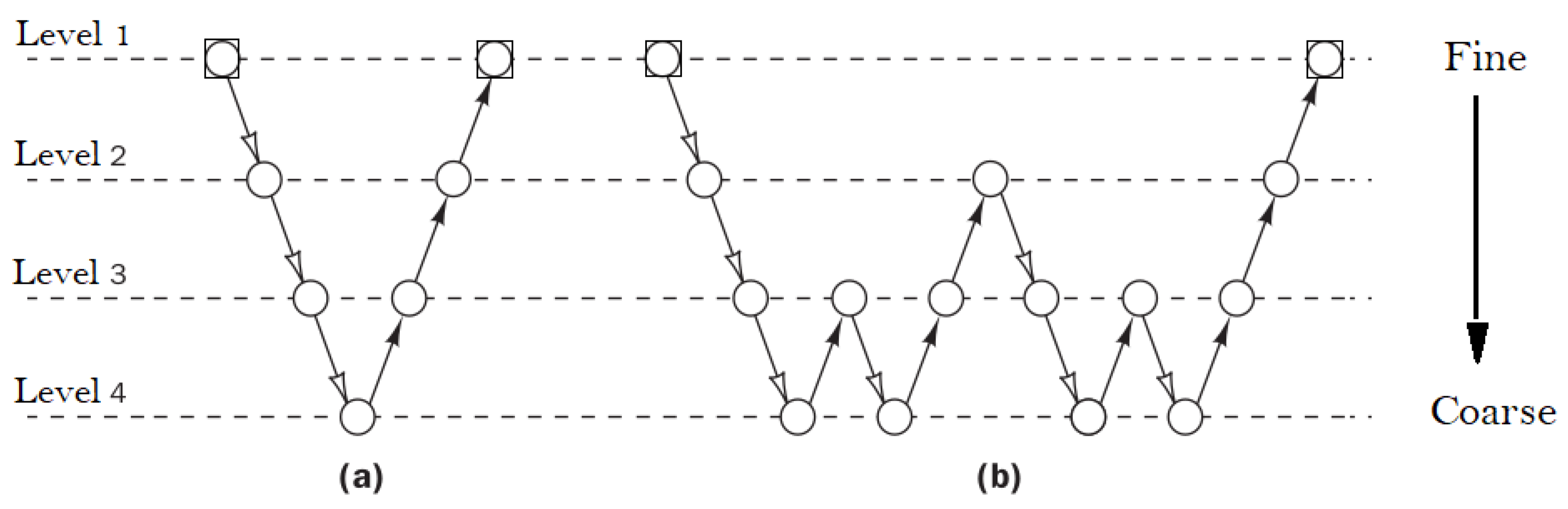
2.5.2. Multigrid Cycles
2.6. Convergence Criteria
2.7. Test Cases
3. Numerical Results
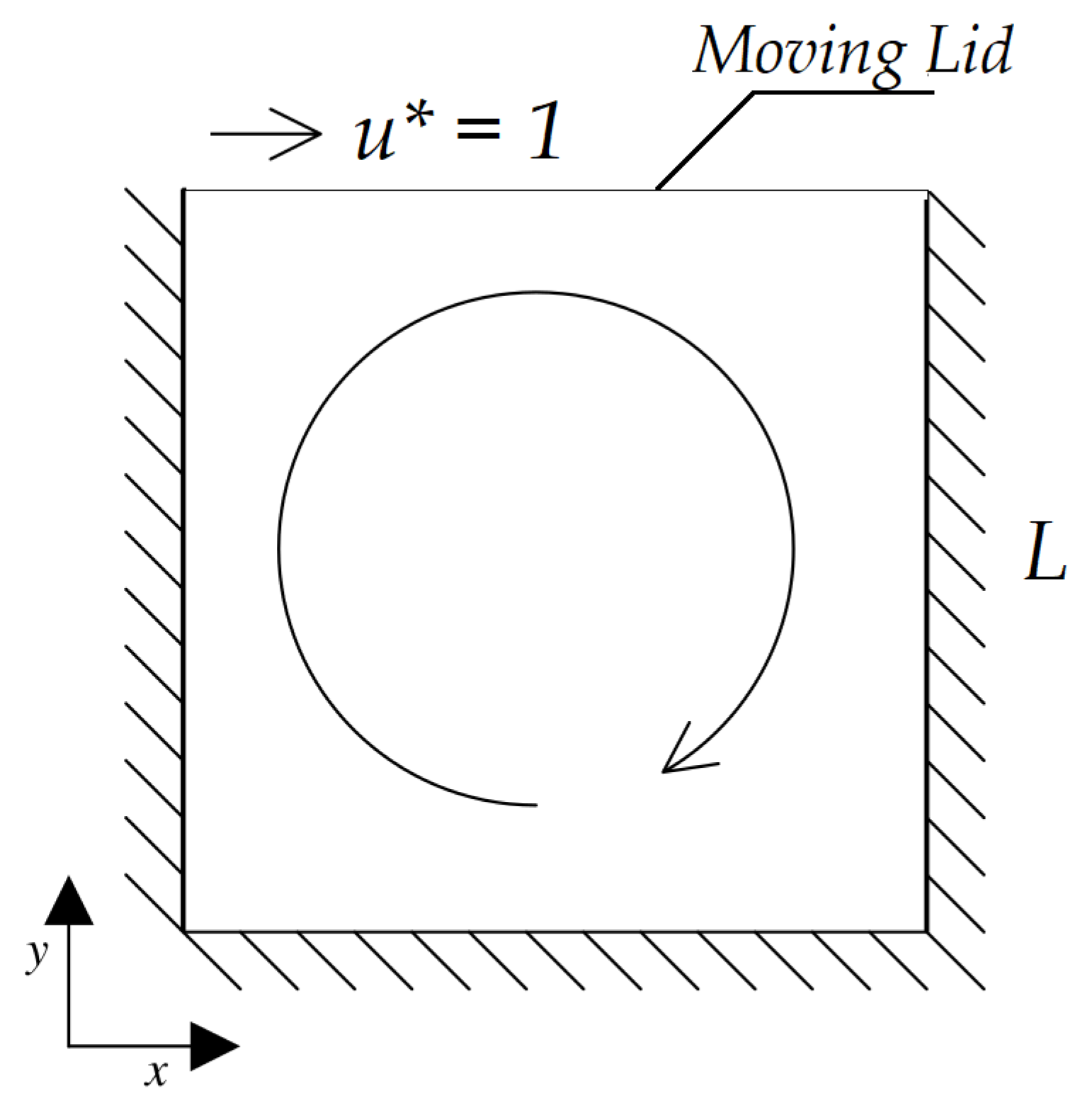
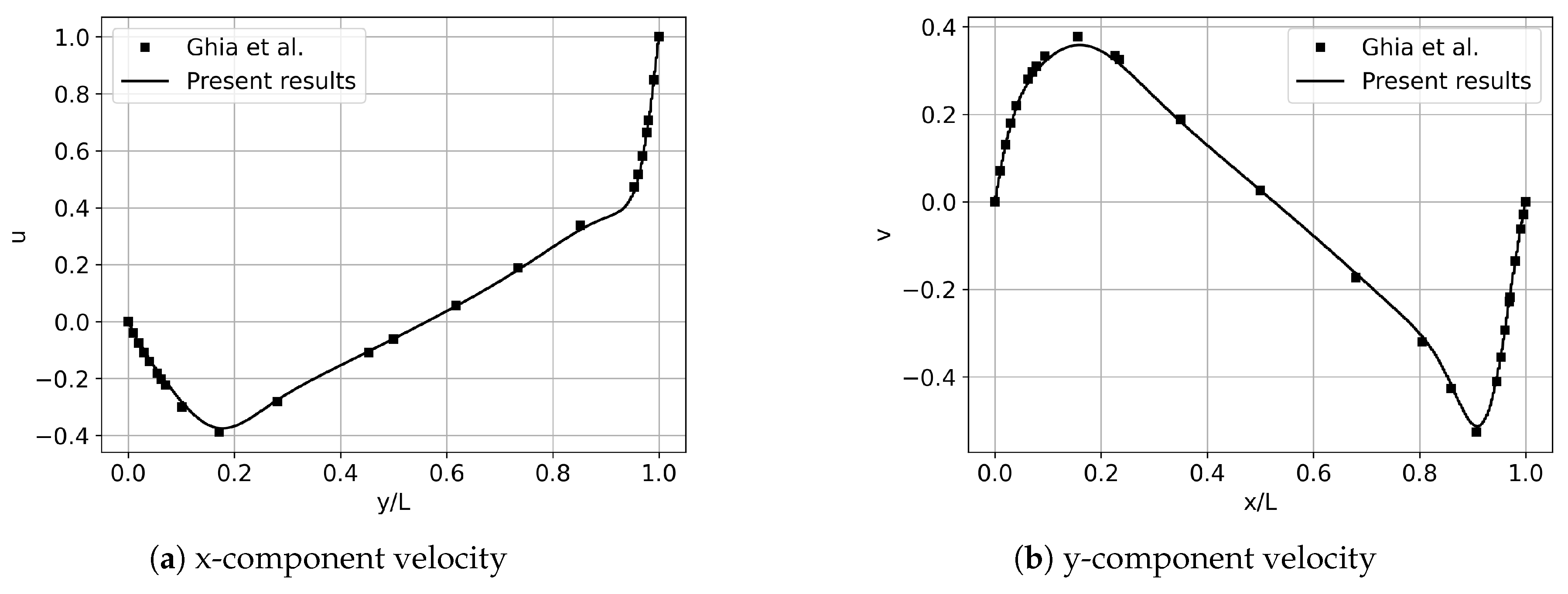
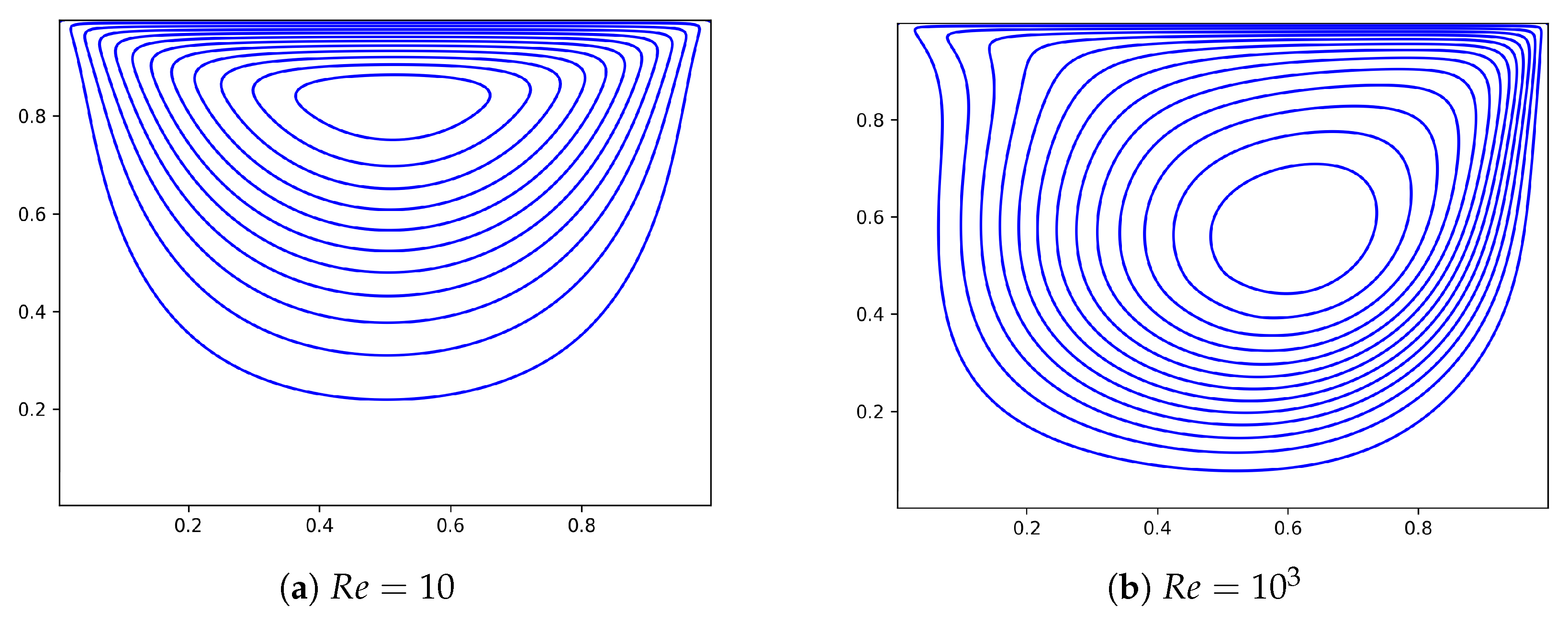
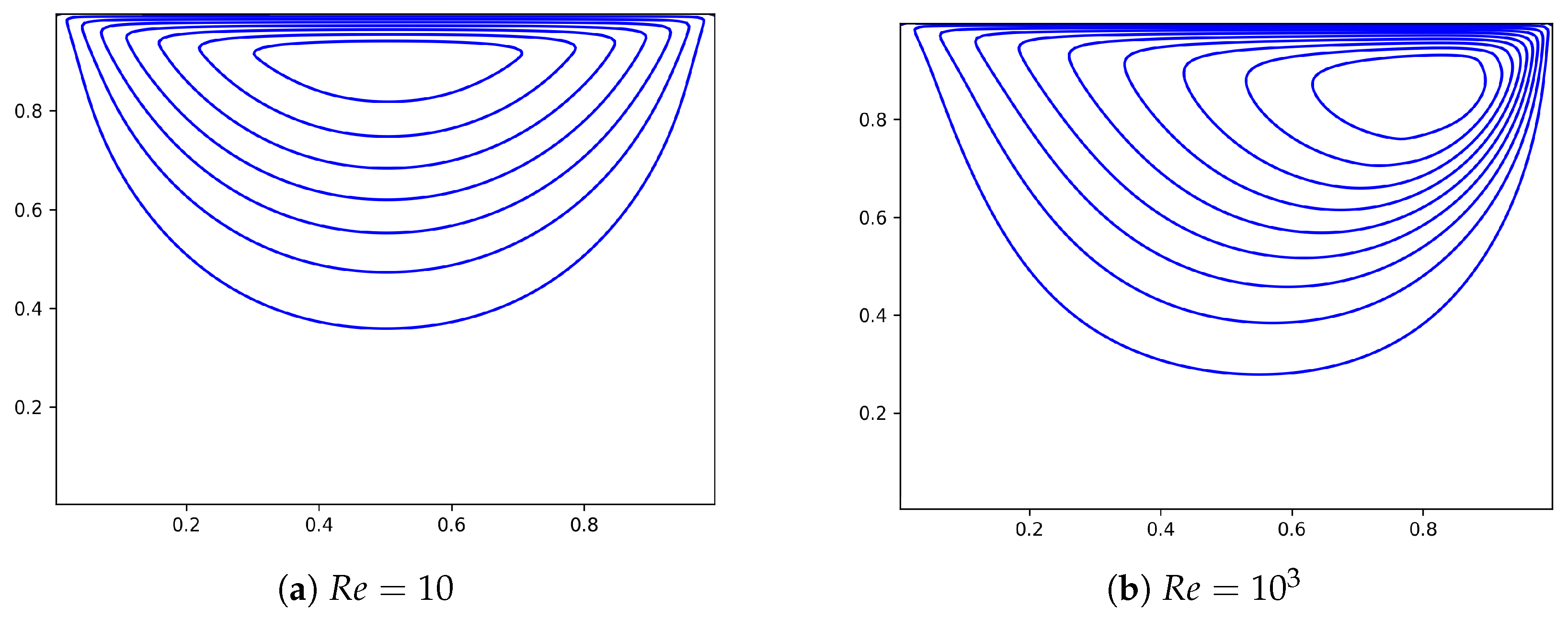
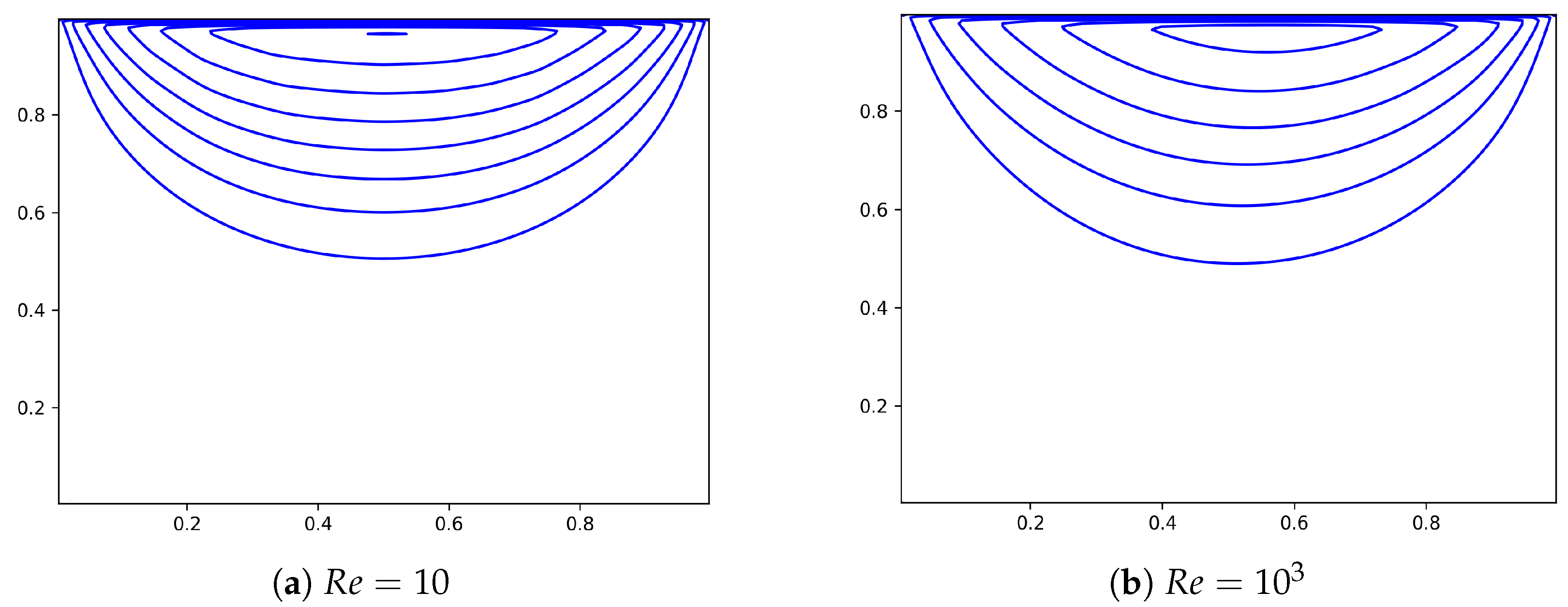
3.1. Verification of the Numerical Method: Lid Driven Cavity
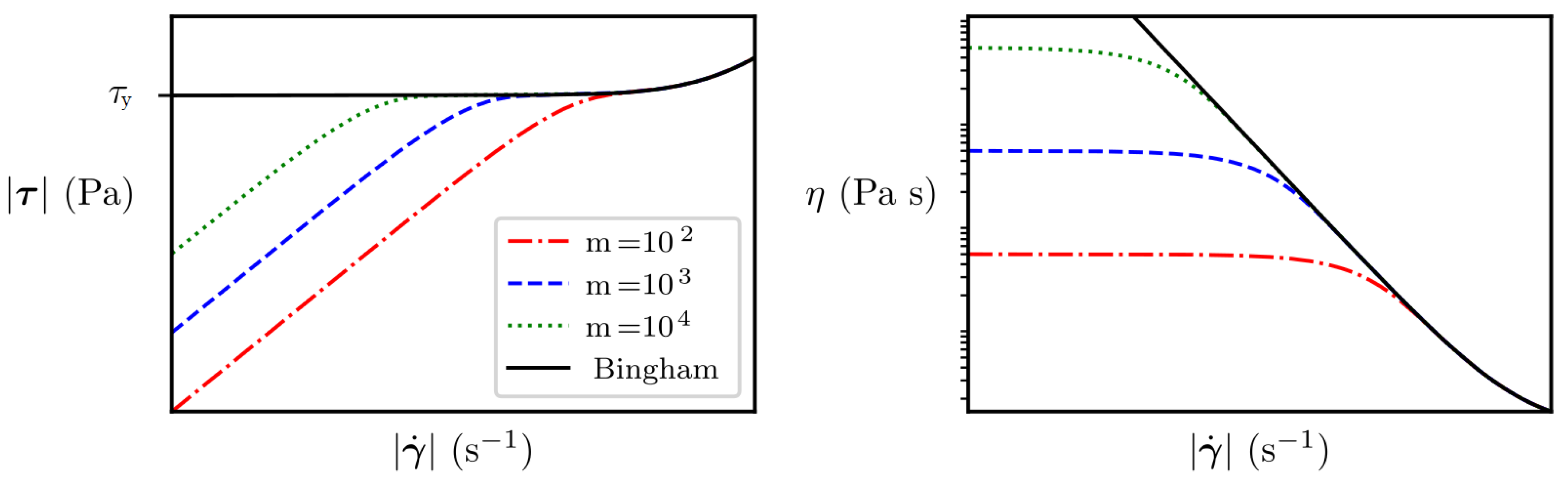
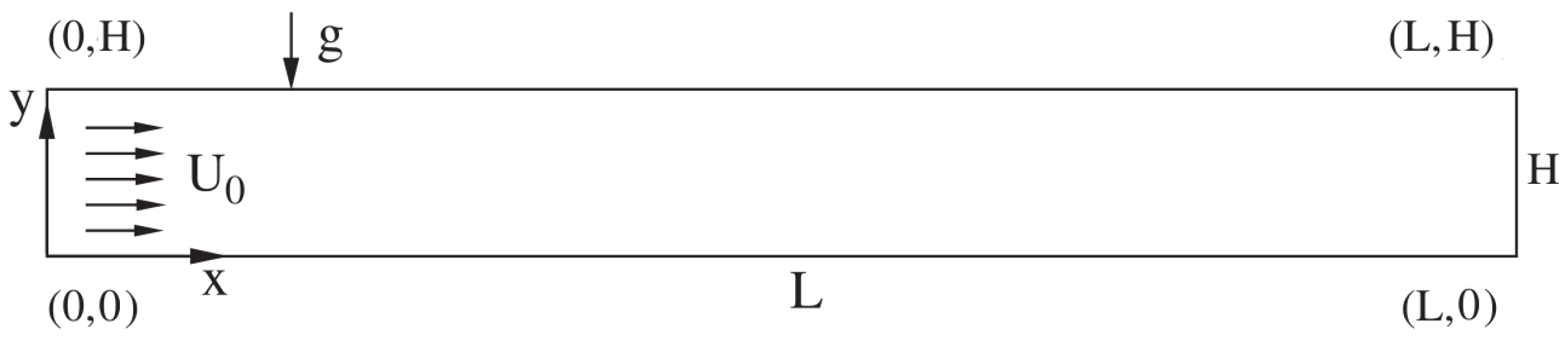
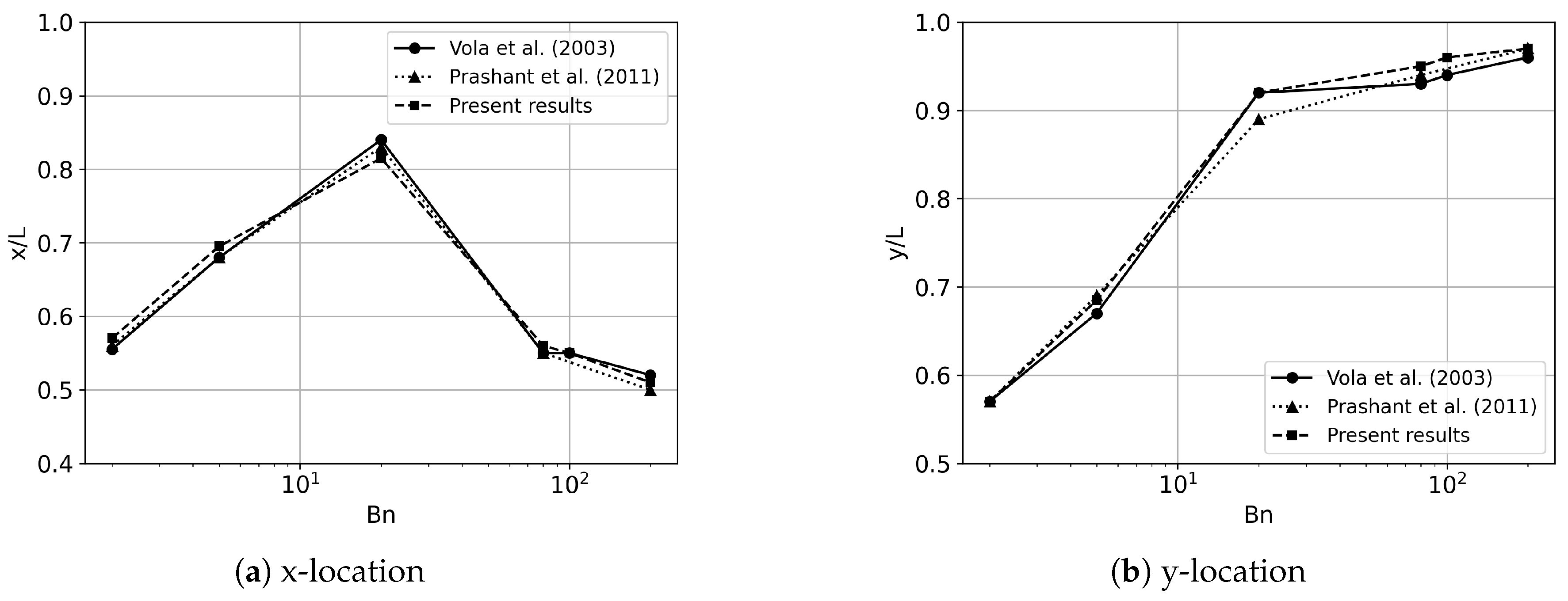
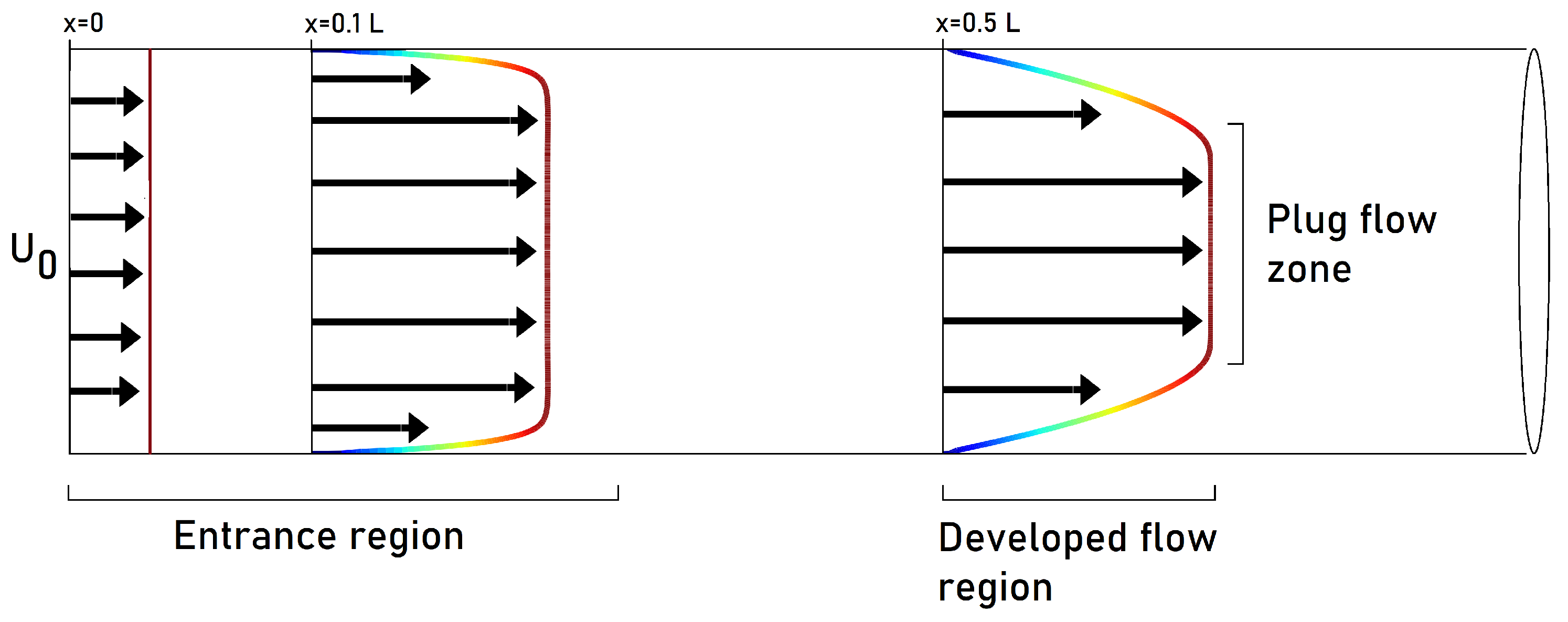
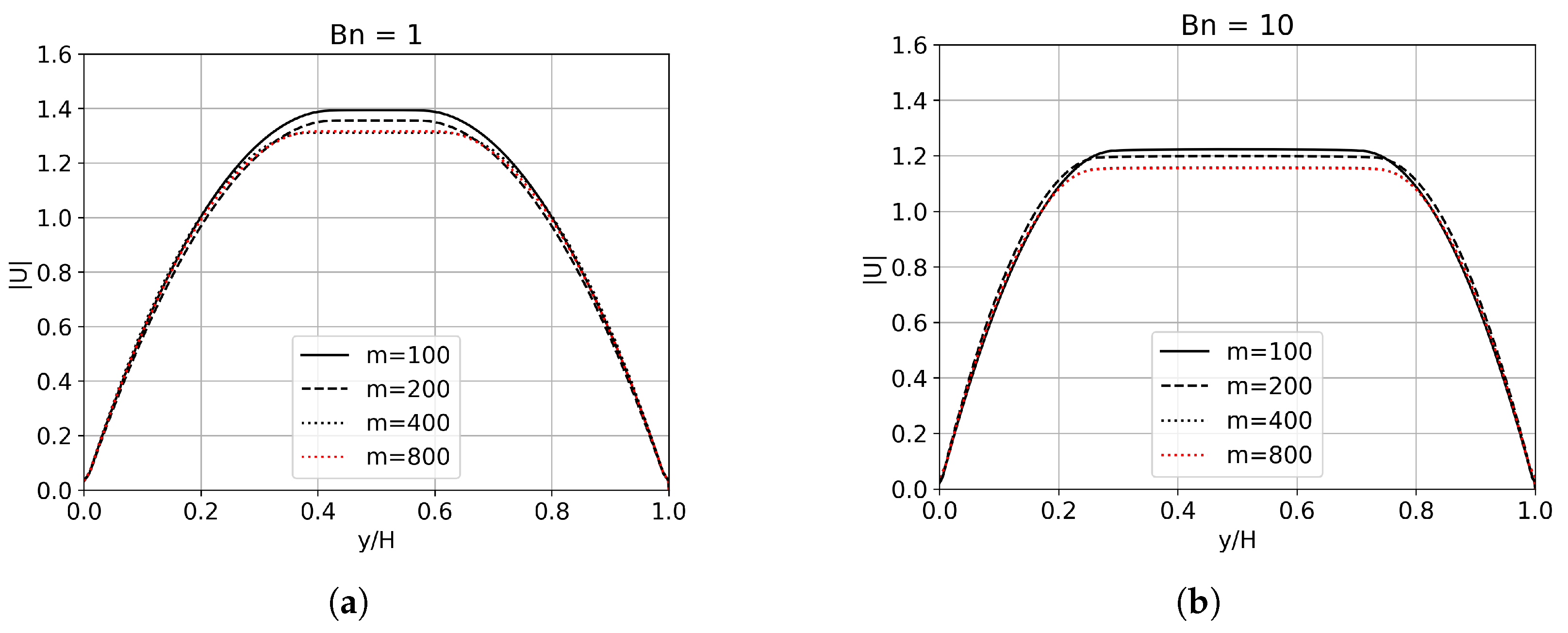
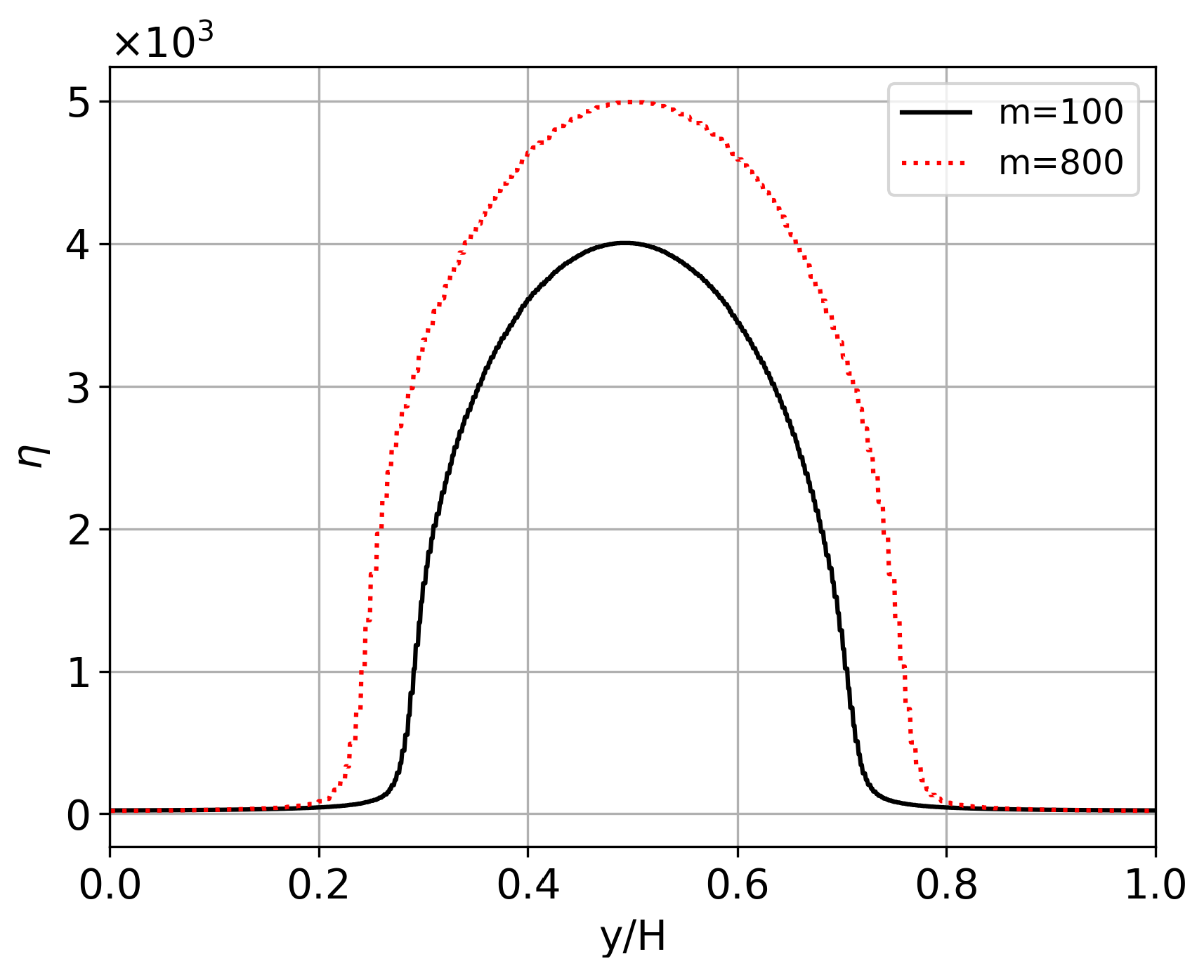
3.2. Influence of the Stress Growth Parameter: Pipe Flow
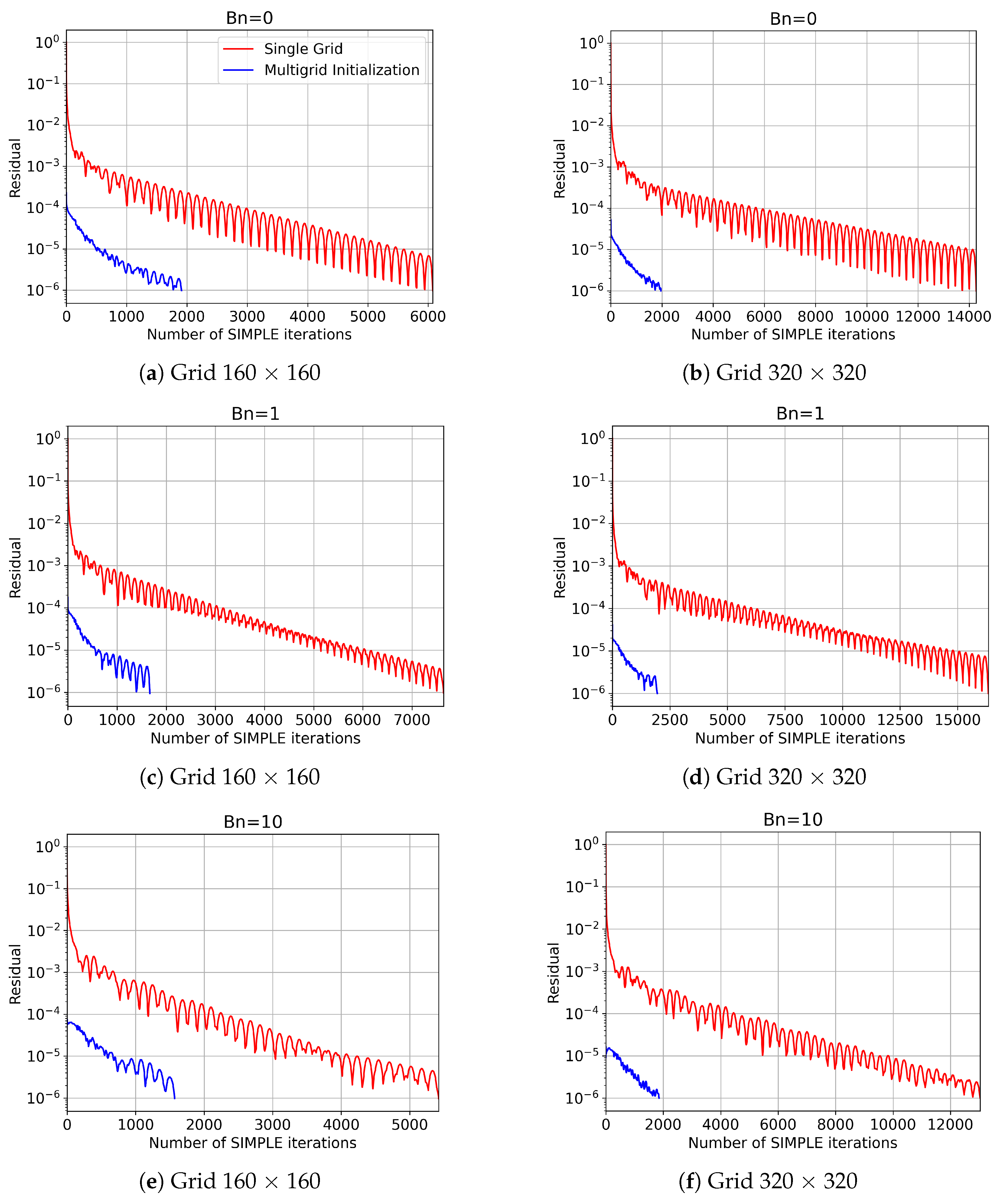
3.3. Algebraic Convergence of the SIMPLE/Regularization Procedure
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Apostolidis, A.J.; Beris, A.N. Modeling of the blood rheology in steady-state shear flows. J. Rheol. 2014, 58, 607–633. [Google Scholar] [CrossRef]
- Frigaard, I.A.; Paso, K.G.; de Souza Mendes, P.R. Bingham’s model in the oil and gas industry. Rheol. Acta 2017, 56, 259–282. [Google Scholar] [CrossRef]
- Akhtar, S.; Almutairi, S.; Nadeem, S. Impact of heat and mass transfer on the Peristaltic flow of non-Newtonian Casson fluid inside an elliptic conduit: Exact solutions through novel technique. Chin. J. Phys. 2022, 78, 194–206. [Google Scholar] [CrossRef]
- Akbar, N.S.; Akhtar, S. Metachronal wave form analysis on cilia-driven flow of non-Newtonain Phan–Thien–Tanner fluid model: A physiological mathematical model. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 2022, 09544089221140703. [Google Scholar] [CrossRef]
- Barnes, H.A. The yield stress—A review or ‘παντα ρει’—Everything flows? J. Non-Newton. Fluid Mech. 1999, 81, 133–178. [Google Scholar] [CrossRef]
- Bingham, E.C. An Investigation of the Laws of Plastic Flow; Number 278; US Government Printing Office: Washington, DC, USA, 1917.
- Bercovier, M.; Engelman, M. A finite-element method for incompressible non-Newtonian flows. J. Comput. Phys. 1980, 36, 313–326. [Google Scholar] [CrossRef]
- Papanastasiou, T.C. Flows of Materials with Yield. J. Rheol. 1987, 31, 385–404. [Google Scholar] [CrossRef]
- Tang, G.; Wang, S.; Ye, P.; Tao, W. Bingham fluid simulation with the incompressible lattice Boltzmann model. J. Non-Newton. Fluid Mech. 2011, 166, 145–151. [Google Scholar] [CrossRef]
- Syrakos, A.; Georgiou, G.C.; Alexandrou, A.N. Performance of the finite volume method in solving regularised Bingham flows: Inertia effects in the lid-driven cavity flow. J. Non-Newton. Fluid Mech. 2014, 208–209, 88–107. [Google Scholar] [CrossRef]
- Frigaard, I.; Nouar, C. On the usage of viscosity regularisation methods for visco-plastic fluid flow computation. J. Non-Newton. Fluid Mech. 2005, 127, 1–26. [Google Scholar] [CrossRef]
- Mitsoulis, E.; Zisis, T. Flow of Bingham plastics in a lid-driven square cavity. J. Non-Newton. Fluid Mech. 2001, 101, 173–180. [Google Scholar] [CrossRef]
- Sverdrup, K.; Nikiforakis, N.; Almgren, A. Highly parallelisable simulations of time-dependent viscoplastic fluid flow with structured adaptive mesh refinement. Phys. Fluids 2018, 30, 093102. [Google Scholar] [CrossRef]
- Busto, S.; Dumbser, M.; Río-Martín, L. Staggered Semi-Implicit Hybrid Finite Volume/Finite Element Schemes for Turbulent and Non-Newtonian Flows. Mathematics 2021, 9, 2972. [Google Scholar] [CrossRef]
- Duvaut, G.; Lions, J.L. Rigid visco-plastic Bingham fluid. In Inequalities in Mechanics and Physics; Grundlehren der Mathematischen Wissenschaften; Springer: Berlin/Heidelberg, Germany, 1976; Volume 219, pp. 278–327. [Google Scholar]
- Glowinski, R. Sur L’Ecoulement D’Un Fluide De Bingham Dans Une Conduite Cylindrique. J. MéCanique 1974, 13, 601–621. [Google Scholar]
- Saramito, P.; Wachs, A. Progress in numerical simulation of yield stress fluid flows. Rheol. Acta 2017, 56, 211–230. [Google Scholar] [CrossRef]
- Patankar, S.V. Numerical Heat Transfer and Fluid Flow; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Ferziger, J.H.; Perić, M.; Street, R.L. Computational Methods for Fluid Dynamics; Springer: Berlin, Germany, 2002; Volume 3. [Google Scholar]
- Patankar, S.; Spalding, D. A calculation procedure for heat, mass and momentum transfer in three-dimensional parabolic flows. Int. J. Heat Mass Transf. 1972, 15, 1787–1806. [Google Scholar] [CrossRef]
- Denner, F.; Evrard, F.; van Wachem, B.G. Conservative finite-volume framework and pressure-based algorithm for flows of incompressible, ideal-gas and real-gas fluids at all speeds. J. Comput. Phys. 2020, 409, 109348. [Google Scholar] [CrossRef]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method; Pearson Education: Harlow, UK, 2007. [Google Scholar]
- Syrakos, A.; Georgiou, G.C.; Alexandrou, A.N. Solution of the square lid-driven cavity flow of a Bingham plastic using the finite volume method. J. Non-Newton. Fluid Mech. 2013, 195, 19–31. [Google Scholar] [CrossRef]
- Roy, P.; Anand, N.K.; Donzis, D. A Parallel Multigrid Finite-Volume Solver on a Collocated Grid for Incompressible Navier-Stokes Equations. Numer. Heat Transf. Part B Fundam. 2015, 67, 376–409. [Google Scholar] [CrossRef]
- Tong, Z.X.; He, Y.L.; Tao, W.Q. A review of current progress in multiscale simulations for fluid flow and heat transfer problems: The frameworks, coupling techniques and future perspectives. Int. J. Heat Mass Transf. 2019, 137, 1263–1289. [Google Scholar] [CrossRef]
- Sivaloganathan, S.; Shaw, G.J. A multigrid method for recirculating flows. Int. J. Numer. Methods Fluids 1988, 8, 417–440. [Google Scholar] [CrossRef]
- Peric, M.; Rüger, M.; Scheuerer, G. A finite volume multigrid method for calculating turbulent flows. In Proceedings of the 7th Symposium on Turbulent Shear Flows, Stanford, CA, USA, 21–23 August 1989; Volume 1, pp. 3–7. [Google Scholar]
- Zhang, C.; Tan, J.; Ning, D. Machine learning strategy for viscous calibration of fully-nonlinear liquid sloshing simulation in FLNG tanks. Appl. Ocean Res. 2021, 114, 102737. [Google Scholar] [CrossRef]
- Saghi, R.; Hirdaris, S.; Saghi, H. The influence of flexible fluid structure interactions on sway induced tank sloshing dynamics. Eng. Anal. Bound. Elem. 2021, 131, 206–217. [Google Scholar] [CrossRef]
- Vångö, M.; Pirker, S.; Lichtenegger, T. Unresolved CFD–DEM modeling of multiphase flow in densely packed particle beds. Appl. Math. Model. 2018, 56, 501–516. [Google Scholar] [CrossRef]
- Giussani, F.; Piscaglia, F.; Sáez-Mischlich, G.; Hèlie, J. A three-phase VOF solver for the simulation of in-nozzle cavitation effects on liquid atomization. J. Comput. Phys. 2020, 406, 109068. [Google Scholar] [CrossRef]
- Di Iorio, S.; Catapano, F.; Magno, A.; Sementa, P.; Vaglieco, B.M. Investigation on sub-23 nm particles and their volatile organic fraction (VOF) in PFI/DI spark ignition engine fueled with gasoline, ethanol and a 30% v/v ethanol blend. J. Aerosol Sci. 2021, 153, 105723. [Google Scholar] [CrossRef]
- Hayase, T.; Humphrey, J.A.; Greif, R. A consistently formulated QUICK scheme for fast and stable convergence using finite-volume iterative calculation procedures. J. Comput. Phys. 1992, 98, 108–118. [Google Scholar] [CrossRef]
- Bartholomew, P.; Denner, F.; Abdol-Azis, M.H.; Marquis, A.; van Wachem, B.G. Unified formulation of the momentum-weighted interpolation for collocated variable arrangements. J. Comput. Phys. 2018, 375, 177–208. [Google Scholar] [CrossRef]
- Rhie, C.M.; Chow, W.L. Numerical study of the turbulent flow past an airfoil with trailing edge separation. AIAA J. 1983, 21, 1525–1532. [Google Scholar] [CrossRef]
- Ghia, U.; Ghia, K.; Shin, C. High-Re solutions for incompressible flow using the Navier-Stokes equations and a multigrid method. J. Comput. Phys. 1982, 48, 387–411. [Google Scholar] [CrossRef]
- Vola, D.; Boscardin, L.; Latché, J. Laminar unsteady flows of Bingham fluids: A numerical strategy and some benchmark results. J. Comput. Phys. 2003, 187, 441–456. [Google Scholar] [CrossRef]
- Prashant; Derksen, J. Direct simulations of spherical particle motion in Bingham liquids. Comput. Chem. Eng. 2011, 35, 1200–1214. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bingham Number | Number of Cells | CPU Time (s) | Number of Iterations | Speed-Up Ratio | ||
|---|---|---|---|---|---|---|
| Single Grid | MG Initialization | Single Grid | MG Initialization | |||
| 0 | 160 × 160 | 88.2 | 35.8 | 6076 | 1910 | 2.46 |
| 320 × 320 | 872.9 | 143.7 | 14,272 | 1964 | 6.07 | |
| 1 | 160 × 160 | 109.9 | 32.4 | 7643 | 1670 | 3.39 |
| 320 × 320 | 990.1 | 153.4 | 16,337 | 1956 | 6.45 | |
| 10 | 160 × 160 | 81.6 | 29.8 | 5424 | 1569 | 2.73 |
| 320 × 320 | 797.3 | 141.5 | 13,033 | 1856 | 5.63 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maazioui, S.; Kissami, I.; Benkhaldoun, F.; Ouazar, D. Numerical Study of Viscoplastic Flows Using a Multigrid Initialization Algorithm. Algorithms 2023, 16, 50. https://doi.org/10.3390/a16010050
Maazioui S, Kissami I, Benkhaldoun F, Ouazar D. Numerical Study of Viscoplastic Flows Using a Multigrid Initialization Algorithm. Algorithms. 2023; 16(1):50. https://doi.org/10.3390/a16010050
Chicago/Turabian StyleMaazioui, Souhail, Imad Kissami, Fayssal Benkhaldoun, and Driss Ouazar. 2023. "Numerical Study of Viscoplastic Flows Using a Multigrid Initialization Algorithm" Algorithms 16, no. 1: 50. https://doi.org/10.3390/a16010050
APA StyleMaazioui, S., Kissami, I., Benkhaldoun, F., & Ouazar, D. (2023). Numerical Study of Viscoplastic Flows Using a Multigrid Initialization Algorithm. Algorithms, 16(1), 50. https://doi.org/10.3390/a16010050