
Tunnel Traffic Evolution during Capacity Drop Based on High-Resolution Vehicle Trajectory Data

Abstract
1. Introduction
2. Literature Review
3. Tunnel Vehicle Trajectory Data Extraction
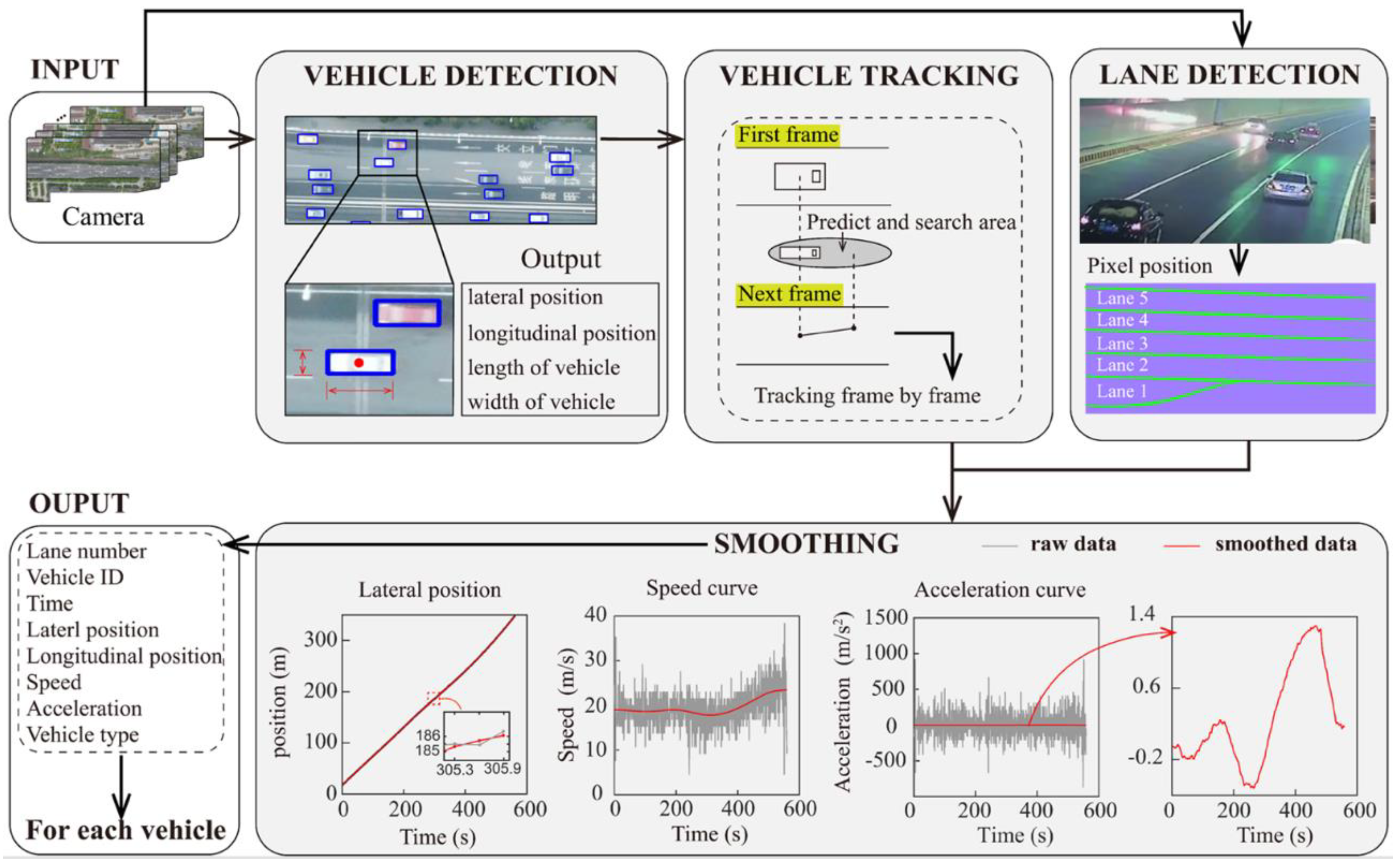
3.1. Extraction of Fixed-Point Vehicle Trajectory in the Tunnel
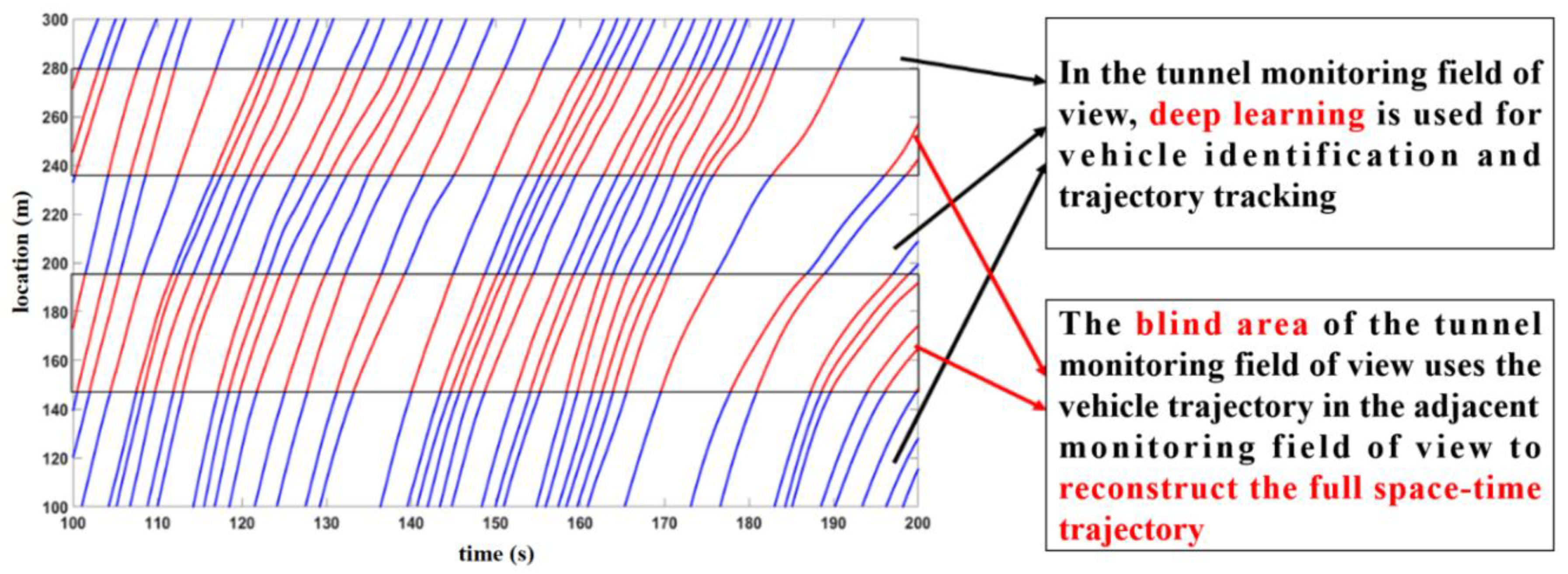
3.2. Reconstruction of Vehicle Track in Entire Space–Time of Tunnel
4. Analysis of Capacity Drop Based on Phase Transition-Theory
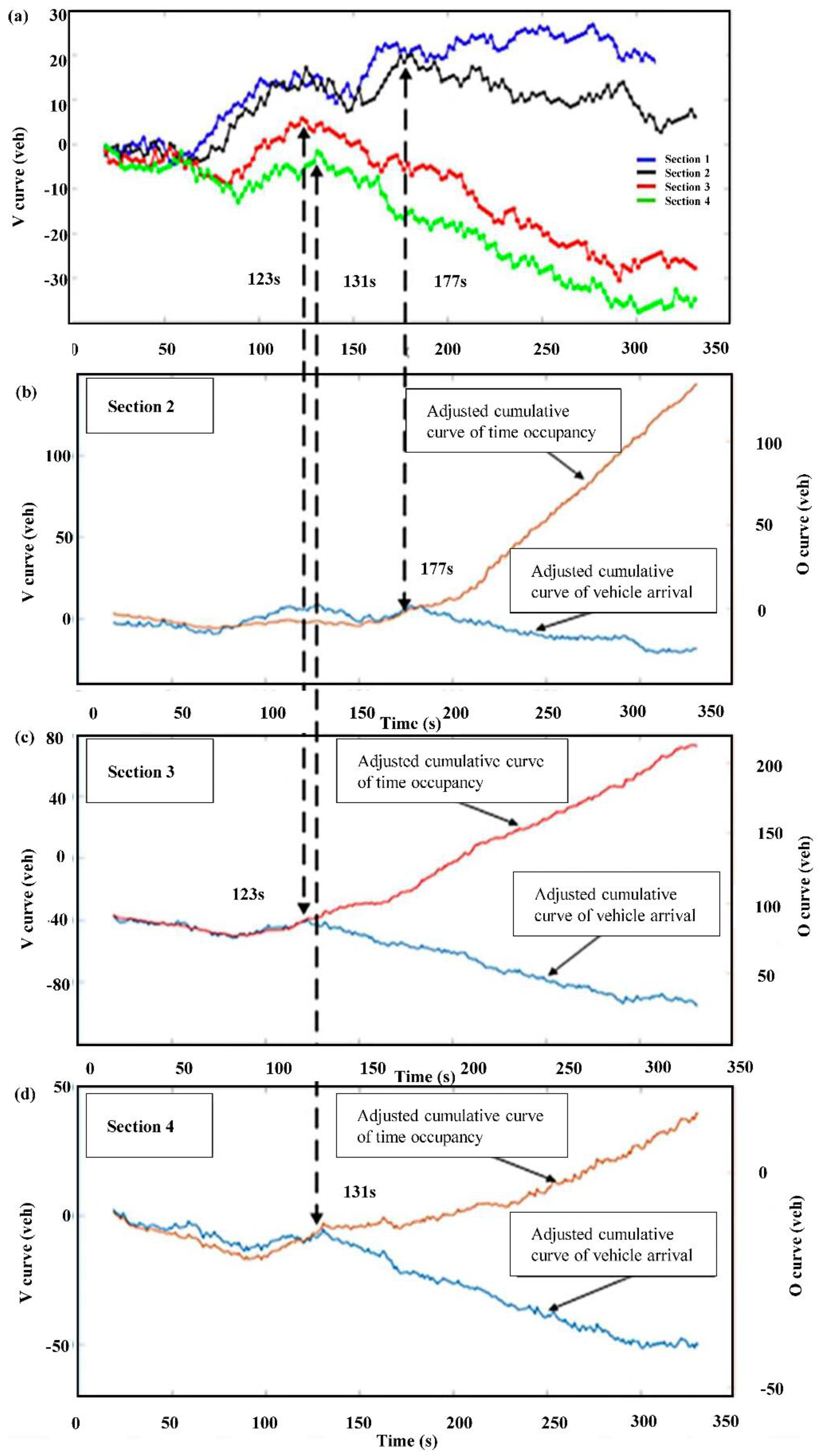
4.1. Identification of Tunnel Capacity Drop
4.2. Analysis of Capacity Drop Based on Traffic Flow
- (1)
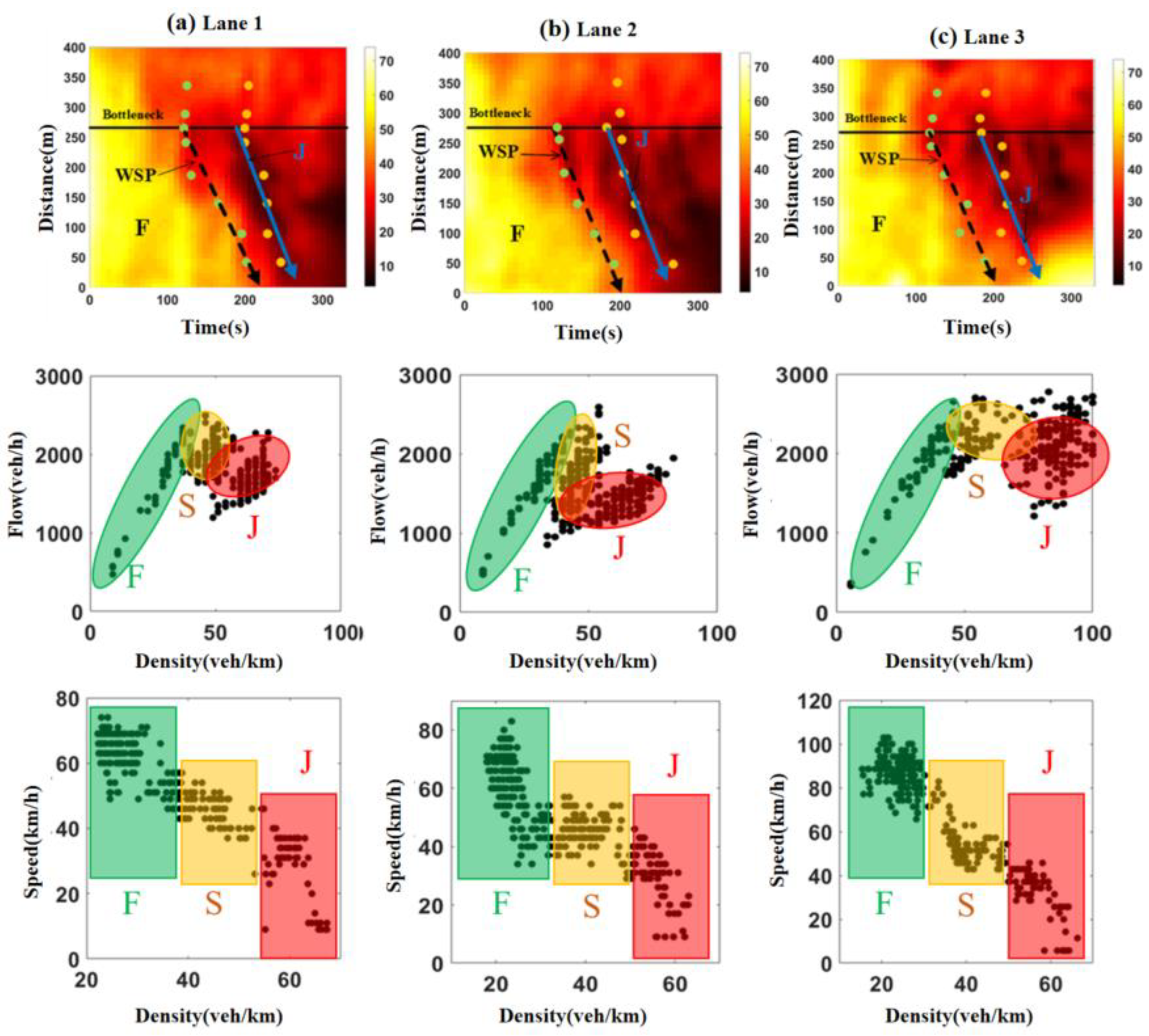
- F->S: Free flow changes to synchronous flow. Traffic crash occurs with the spontaneous start and propagation of the synchronous flow (the upstream boundary of the synchronous flow propagates upstream, while the downstream boundary is fixed at the bottleneck). According to the black dotted arrow in the distance–time diagrams in the first row of subfigures in Figure 3, the vehicle begins to slow down when approaching the upstream interface, and the bottleneck capacity does not change significantly at this time.
- (2)
- S->J: Synchronous flow changes to jam flow. Some narrow moving jams (narrow moving jams) appeared in this state, and then they evolved into wide moving jams (J appeared). At this time, the capacity has been significantly reduced.
5. Analysis of Tunnel Driving Behavior
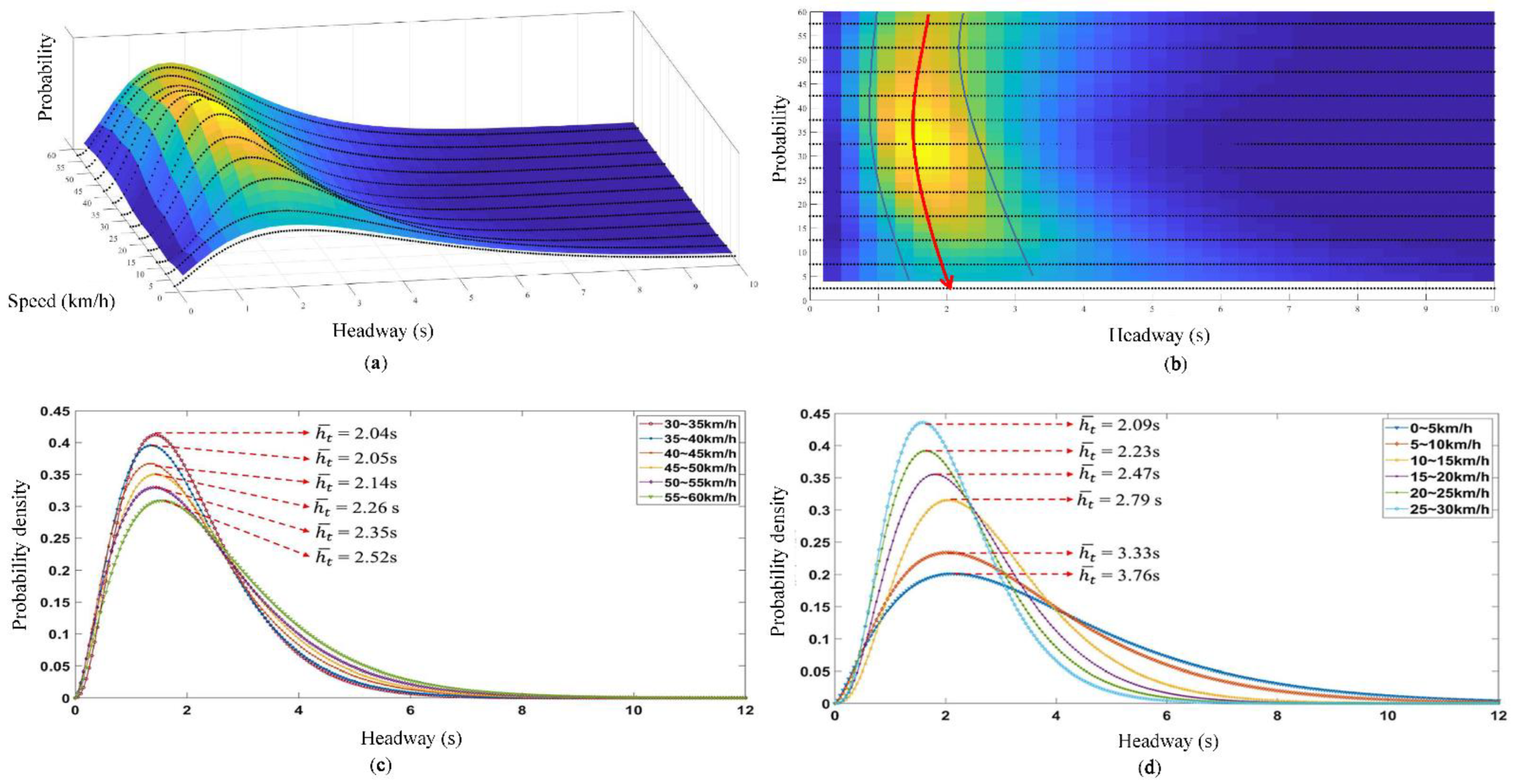
5.1. Analysis of Headway Distribution
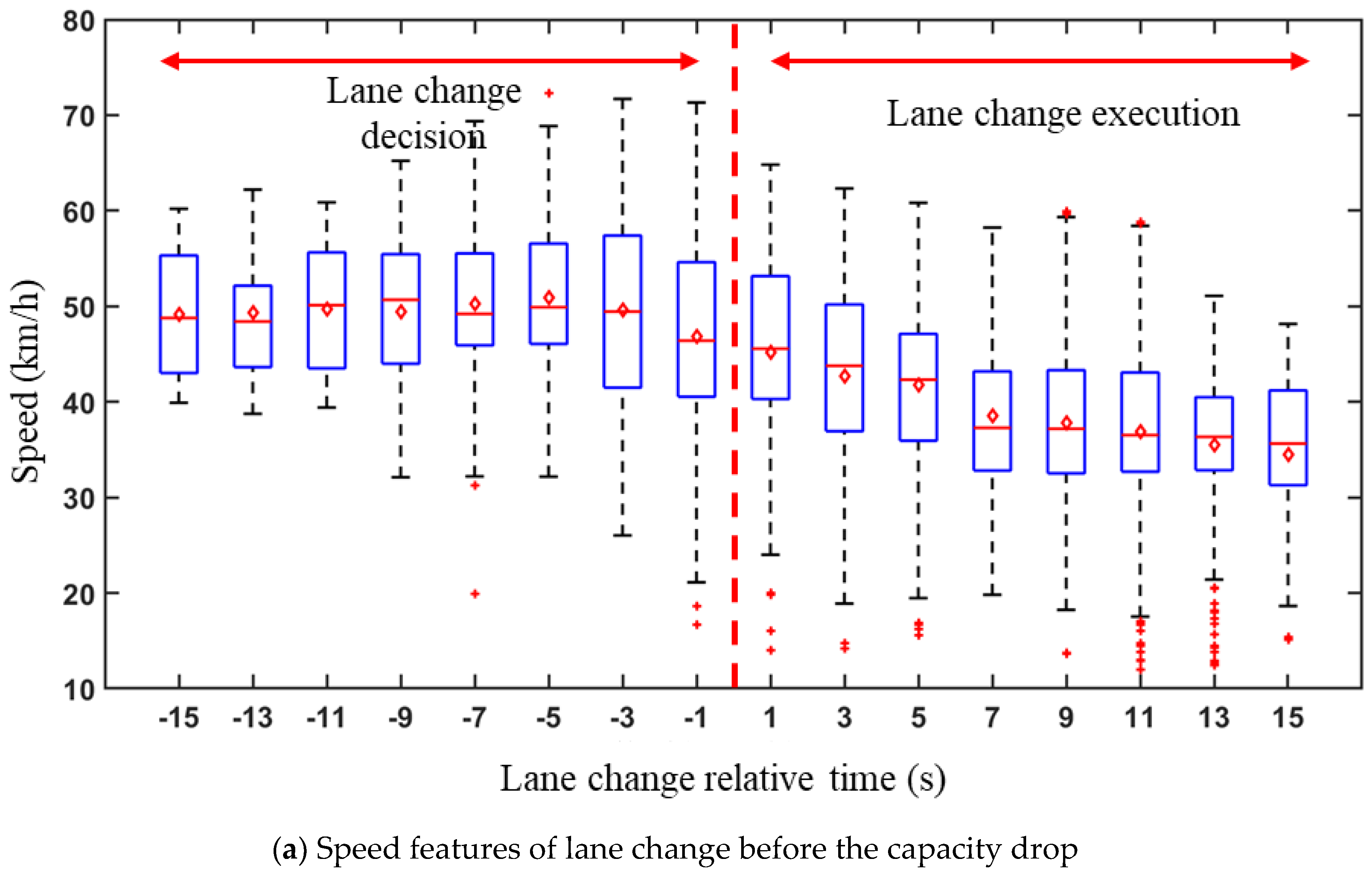
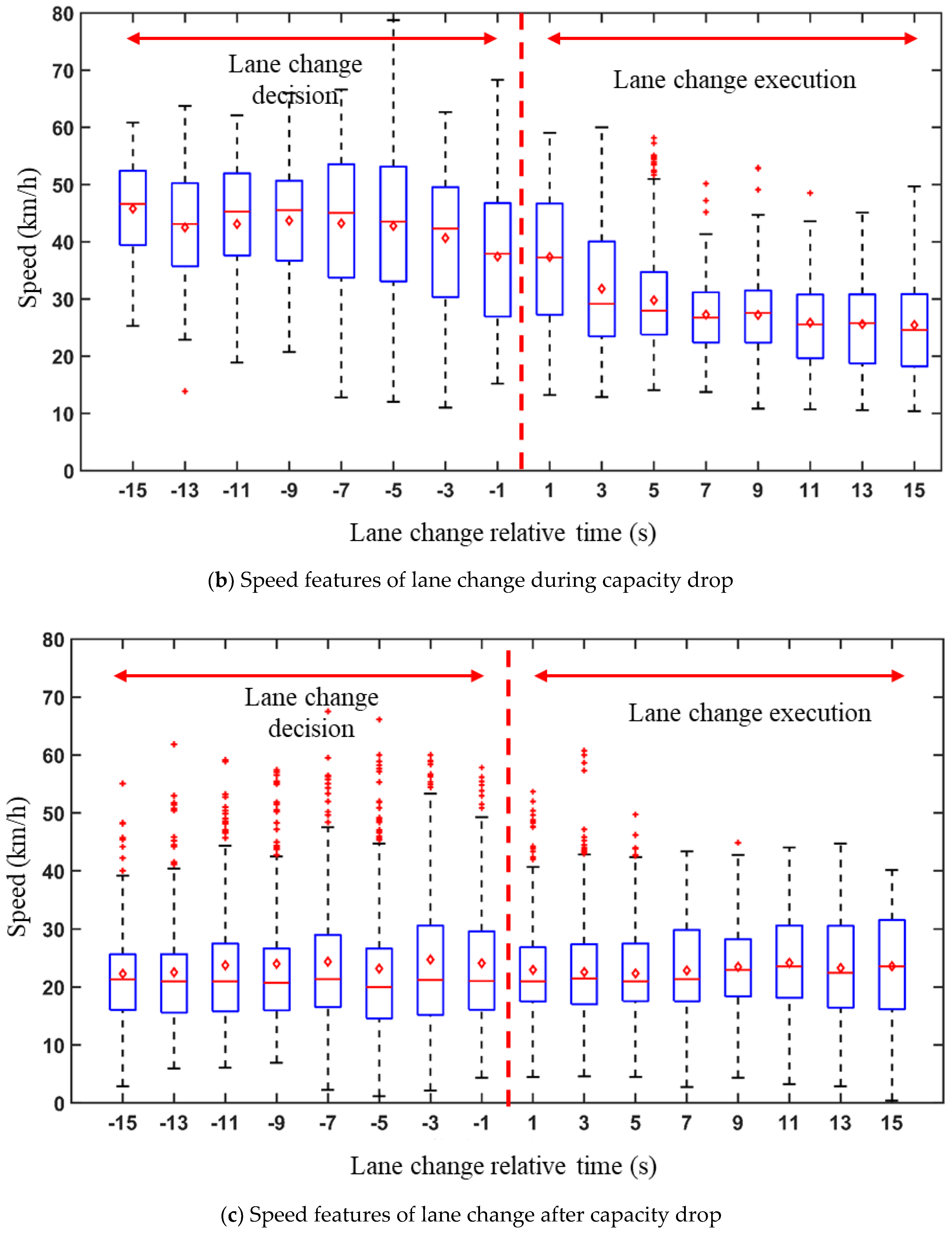
5.2. Analysis of Lane-Change Speed
6. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jin, W.-L. Kinematic wave models of sag and tunnel bottlenecks. Transp. Res. Part B Methodol. 2018, 107, 41–56. [Google Scholar] [CrossRef]
- Sun, J.; Li, T.; Yu, M.; Zhang, H.M. Exploring the Congestion Pattern at Long-Queued Tunnel Sag and Increasing the Efficiency by Control. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3765–3774. [Google Scholar] [CrossRef]
- Anderson, M.L.; Davis, L.W. An empirical test of hypercongestion in highway bottlenecks. J. Public Econ. 2020, 187, 104197. [Google Scholar] [CrossRef]
- Wada, K.; Martinez, I.; Jin, W.-L. Continuum car-following model of capacity drop at sag and tunnel bottlenecks. Transp. Res. Part C Emerg. Technol. 2020, 113, 260–276. [Google Scholar] [CrossRef]
- Martínez, I.; Jin, W.-L. Impact of VSL Location on Capacity Drop: A Case of Sag and Tunnel Bottlenecks. Transp. Res. Procedia 2018, 34, 12–19. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X.; Zhang, S.; Zheng, P.; Guo, J.; Zhang, L.; Hu, S.; Cheng, S.; Wei, H. Freeway traffic control in presence of capacity drop. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1497–1516. [Google Scholar] [CrossRef]
- Edie, L.C. Car-Following and Steady-State Theory for Noncongested Traffic. Oper. Res. 1961, 9, 66–76. [Google Scholar] [CrossRef]
- Greenberg, H. An Analysis of Traffic Flow. Oper. Res. 1959, 7, 79–85. [Google Scholar] [CrossRef]
- Koshi, M. Some findings and an overview on vehicular flow characteristics. In Proceedings of the 8th International Symposium on Transportation and Traffic Theory, Toronto, ON, Canada, 1 January 1983. [Google Scholar]
- Banks, J.H. The two-capacity phenomenon: Some theoretical issues. Transp. Res. Rec. 1991, 1320, 234–241. [Google Scholar]
- Kim, K.; Cassidy, M.J. A capacity-increasing mechanism in freeway traffic. Transp. Res. Part B Methodol. 2012, 46, 1260–1272. [Google Scholar] [CrossRef]
- Cassidy, M.J. An Empirical and Theoretical Study of Freeway Weave Bottlenecks. 2009. Available online: https://escholarship.org/uc/item/2970816w (accessed on 10 September 2021).
- Kerner, B.S. Experimental Features of Self-Organization in Traffic Flow. Phys. Rev. Lett. 1998, 81, 3797–3800. [Google Scholar] [CrossRef]
- Kerner, B.S.; Rehborn, H. Experimental properties of complexity in traffic flow. Phys. Rev. E 1996, 53, R4275–R4278. [Google Scholar] [CrossRef]
- Kerner, B.S. Three-phase traffic theory and highway capacity. Phys. A Stat. Mech. Its Appl. 2002, 333, 379–440. [Google Scholar] [CrossRef]
- Instability in Dense Highway Traffic: A Review. In Proceedings of the Second International Symposium on the Theory of Traffic Flow, London, UK; Organisation for Economic Co-Operation and Development: Paris, France, 1963; pp. 73–83.
- Marczak, F.; Daamen, W.; Buisson, C. Empirical Analysis of Lane Changing Behavior at a Freeway Weaving Section. In Proceedings of the 93th Annual Meeting of the TRB, Washington, DC, USA, 12–16 January 2014. [Google Scholar]
- Liu, W.; Chen, K.Q.; Tian, Z.Z.; Yang, G.C. Capacity of Urban Arterial Weaving Sections under Lane Signal Control Strategy. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 69–77. [Google Scholar] [CrossRef]
- Cassidy, M.J.; Ahn, S. Driver turn-taking behavior in congested freeway merges. Transp. Res. Rec. 2005, 1934, 140–147. [Google Scholar] [CrossRef]
- Cassidy, M.J.; Rudjanakanoknad, J. Increasing the capacity of an isolated merge by metering its on-ramp. Transp. Res. Part B Methodol. 2005, 39, 896–913. [Google Scholar] [CrossRef]
- Chen, D.; Ahn, S. Capacity-drop at extended bottlenecks: Merge, diverge, and weave. Transp. Res. Part B Methodol. 2018, 108, 1–20. [Google Scholar] [CrossRef]
- Zhou, Y.; Chung, E.; Cholette, M.E.; Bhaskar, A. Real-Time Joint Estimation of Traffic States and Parameters Using Cell Transmission Model and Considering Capacity Drop. In Proceedings of the 21st IEEE Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018; pp. 2797–2804. [Google Scholar] [CrossRef]
- Chung, K.; Rudjanakanoknad, J.; Cassidy, M.J. Relation between traffic density and capacity drop at three freeway bottlenecks. Transp. Res. Part B Methodol. 2007, 41, 82–95. [Google Scholar] [CrossRef]
- Lu, Y.; Wong, S.; Zhang, M.; Shu, C.-W.; Chen, W. Explicit construction of entropy solutions for the Lighthill–Whitham–Richards traffic flow model with a piecewise quadratic flow–density relationship. Transp. Res. Part B Methodol. 2008, 42, 355–372. [Google Scholar] [CrossRef]
- Srivastava, A.; Geroliminis, N. Empirical observations of capacity drop in freeway merges with ramp control and integration in a first-order model. Transp. Res. Part C Emerg. Technol. 2013, 30, 161–177. [Google Scholar] [CrossRef]
- Parzani, C.; Buisson, C. Second-Order Model and Capacity Drop at Merge. Transp. Res. Rec. J. Transp. Res. Board 2012, 2315, 25–34. [Google Scholar] [CrossRef]
- Oh, S.; Yeo, H. Estimation of Capacity Drop in Highway Merging Sections. Transp. Res. Rec. J. Transp. Res. Board 2012, 2286, 111–121. [Google Scholar] [CrossRef]
- Bick, J.H.; Newell, G.F. A continuum model for two-directional traffic flow. Q. Appl. Math. 1960, 18, 191–204. [Google Scholar] [CrossRef]
- Yeo, H. A proposed asymmetric microscopic traffic flow theory. In Proceedings of the 88th Transportation Research Board Annual Meeting, Washington, DC, USA, 15 November 2009. [Google Scholar]
- Yeo, H.; Skabardonis, A.; Halkias, J.; Colyar, J.; Alexiadis, V. Oversaturated freeway flow algorithm for use in next generation simulation. Transp. Res. Rec. 2008, 2088, 68–79. [Google Scholar] [CrossRef]
- Calvert, S.C.; van Wageningen-Kessels, F.L.M.; Hoogendoorn, S.P. Capacity drop through reaction times in heterogeneous traffic. J. Traffic Transp. Eng. 2018, 5, 96–104. [Google Scholar] [CrossRef]
- Yuan, K.; Knoop, V.L.; Leclercq, L.; Hoogendoorn, S.P. Capacity drop: A comparison between stop-and-go wave and standing queue at lane-drop bottleneck. Transp. B Transp. Dyn. 2017, 5, 145–158. [Google Scholar] [CrossRef]
- Jin, W.-L.; Gan, Q.-J.; Lebacque, J.-P. A kinematic wave theory of capacity drop. Transp. Res. Part B Methodol. 2015, 81, 316–329. [Google Scholar] [CrossRef]
- Monamy, T.; Haj-Salem, S.; Lebacque, J.-P. A macroscopic node model related to capacity drop. Procedia Soc. Behav. Sci. 2012, 54, 1388–1396. [Google Scholar] [CrossRef]
- Jin, W.-L. A first-order behavioral model of capacity drop. Transp. Res. Part B Methodol. 2017, 105, 438–457. [Google Scholar] [CrossRef]
- Leclercq, L.; Laval, L.A.; Chiabaut, N. Capacity drops at merges: An endogenous model. Transp. Res. Part B Methodol. 2011, 45, 1302–1313. [Google Scholar] [CrossRef]
- Chen, D.J.; Sivastava, A.; Ahn, S.; Li, T. Traffic dynamics under speed disturbance in mixed traffic with automated and non-automated vehicles. Transp. Res. Part C 2019, 38, 709–729. [Google Scholar] [CrossRef]
- Oh, S.; Yeo, H. Impact of stop-and-go waves and lane changes on discharge rate in recovery flow. Transp. Res. Part B Methodol. 2015, 77, 88–102. [Google Scholar] [CrossRef]
- Zhang, C.; Sabar, N.; Chung, E.; Bhaskar, A.; Guo, X. Optimisation of lane-changing advisory at the motorway lane drop bottleneck. Transp. Res. Part C Emerg. Technol. 2019, 106, 303–316. [Google Scholar] [CrossRef]
- Rahman, R.; Bin Azad, Z.; Hasan, B. Densely-Populated Traffic Detection Using YOLOv5 and Non-maximum Suppression Ensembling. In Proceedings of the International Conference on Big Data, IoT, and Machine Learning 2022, Sydney, Australia, 22–23 October 2022; Springer: Singapore, 2022; pp. 567–578. [Google Scholar] [CrossRef]
- Ke, R.; Li, Z.; Tang, J.; Pan, Z.; Wang, Y. Real-Time Traffic Flow Parameter Estimation From UAV Video Based on Ensemble Classifier and Optical Flow. IEEE Trans. Intell. Transp. Syst. 2018, 20, 54–64. [Google Scholar] [CrossRef]
- Chen, X.; Li, Z.; Yang, Y.; Qi, L.; Ke, R. High-Resolution Vehicle Trajectory Extraction and Denoising From Aerial Videos. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3190–3202. [Google Scholar] [CrossRef]
- Fuhs, C.; Parsons, B. Synthesis of Active Traffic Management Experiences in Europe and the United States; No. FHWA-HOP-10-031; Federal Highway Administration: Washington, DC, USA, 2010.
- Ferreira, J. Cooperative, Connected and Automated Mobility (CCAM): Technologies and Applications. Electronics 2019, 8, 1549. [Google Scholar] [CrossRef]
- Slamnik-Krijestorac, N.; Yilma, G.M.; Liebsch, M.; Yousaf, F.Z.; Marquez-Barja, J. Collaborative orchestration of multi-domain edges from a Connected, Cooperative and Automated Mobility (CCAM) perspective. IEEE Trans. Mob. Comput. 2021, 1. [Google Scholar] [CrossRef]
- Centenaro, M.; Berlato, S.; Carbone, R.; Burzio, G.; Cordella, G.F.; Riggio, R.; Ranise, S. Safety-Related Cooperative, Connected, and Automated Mobility Services: Interplay Between Functional and Security Requirements. IEEE Veh. Technol. Mag. 2021, 16, 78–88. [Google Scholar] [CrossRef]
- Sawant, J.; Chaskar, U.; Ginoya, D. Robust Control of Cooperative Adaptive Cruise Control in the Absence of Information About Preceding Vehicle Acceleration. IEEE Trans. Intell. Transp. Syst. 2021, 99, 5589–5598. [Google Scholar] [CrossRef]
- Cui, L.; Chen, Z.; Wang, A.; Hu, J.; Park, B.B. Development of a Robust Cooperative Adaptive Cruise Control With Dynamic Topology. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4279–4290. [Google Scholar] [CrossRef]
- Alonso Raposo, M.; Grosso, M.; Després, J.; Fernández Macías, E.; Galassi, C.; Krasenbrink, A.; Krause, J.; Levati, L.; Mourtzouchou, A.; Saveyn, B.; et al. An Analysis of Possible Socio-Economic Effects of a Cooperative, Connected and Automated Mobility (CCAM) in Europe; Technical Report; Publications Office of the European Union: Luxembourg, 2018; pp. 1–212. Available online: https://core.ac.uk/download/pdf/157830385.pdf (accessed on 15 January 2022).
- Munoz, R.; Vazquez-Gallego, F.; Casellas, R.; Vilalta, R.; Sedar, R.; Alemany, P.; Martinez, R.; Alonso-Zarate, J.; Papageorgiou, A.; Catalan-Cid, M.; et al. 5GCroCo Barcelona Trial Site for Cross-border Anticipated Cooperative Collision Avoidance. In Proceedings of the 2020 European Conference on Networks and Communications (EuCNC), Dubrovnik, Croatia, 15–18 June 2020. [Google Scholar]
- Lemstra, W. Leadership with 5G in Europe: Two contrasting images of the future, with policy and regulatory implications. Telecommun. Policy 2018, 42, 587–611. [Google Scholar] [CrossRef]
- Qu, G.; Qiu, B.; Zhang, Y.; Wang, H. The Industry Situation and Inspiration of Intelligent Connected Vehicles in Europe, America and Japan. Cyber Secur. Intell. Anal. 2021, 1342, 259–265. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lane 1 | Lane 2 | Lane 3 | Lane 4 | |||||
|---|---|---|---|---|---|---|---|---|
| Sample Size | Mean (S.D.) | Sample Size | Mean (S.D.) | Sample Size | Mean (S.D.) | Sample Size | Mean (S.D.) | |
| aLC | 34 | 0.042 (11.2) | 100 | −0.103 (0.400) | 125 | −0.098 (0.501) | 259 | −0.083 (0.451) |
| aFO | 11 | 0.101 (0.221) | 42 | −0.014 (0.241) | 50 | 0.153 (0.371) | 103 | 0.079 (0.267) |
| aFT | 17 | −0.002 (0.283) | 49 | −0.057 (0.332) | 69 | −0.060 (0.328) | 135 | −0.052 (0.294) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Wang, C.; Li, Z. Tunnel Traffic Evolution during Capacity Drop Based on High-Resolution Vehicle Trajectory Data. Algorithms 2022, 15, 240. https://doi.org/10.3390/a15070240
Yang L, Wang C, Li Z. Tunnel Traffic Evolution during Capacity Drop Based on High-Resolution Vehicle Trajectory Data. Algorithms. 2022; 15(7):240. https://doi.org/10.3390/a15070240
Chicago/Turabian StyleYang, Lu, Chishe Wang, and Zhibin Li. 2022. "Tunnel Traffic Evolution during Capacity Drop Based on High-Resolution Vehicle Trajectory Data" Algorithms 15, no. 7: 240. https://doi.org/10.3390/a15070240
APA StyleYang, L., Wang, C., & Li, Z. (2022). Tunnel Traffic Evolution during Capacity Drop Based on High-Resolution Vehicle Trajectory Data. Algorithms, 15(7), 240. https://doi.org/10.3390/a15070240