
A Two-Dimensional mKdV Linear Map and Its Application in Digital Image Cryptography


Abstract
1. Introduction
2. Formulation of the Problem
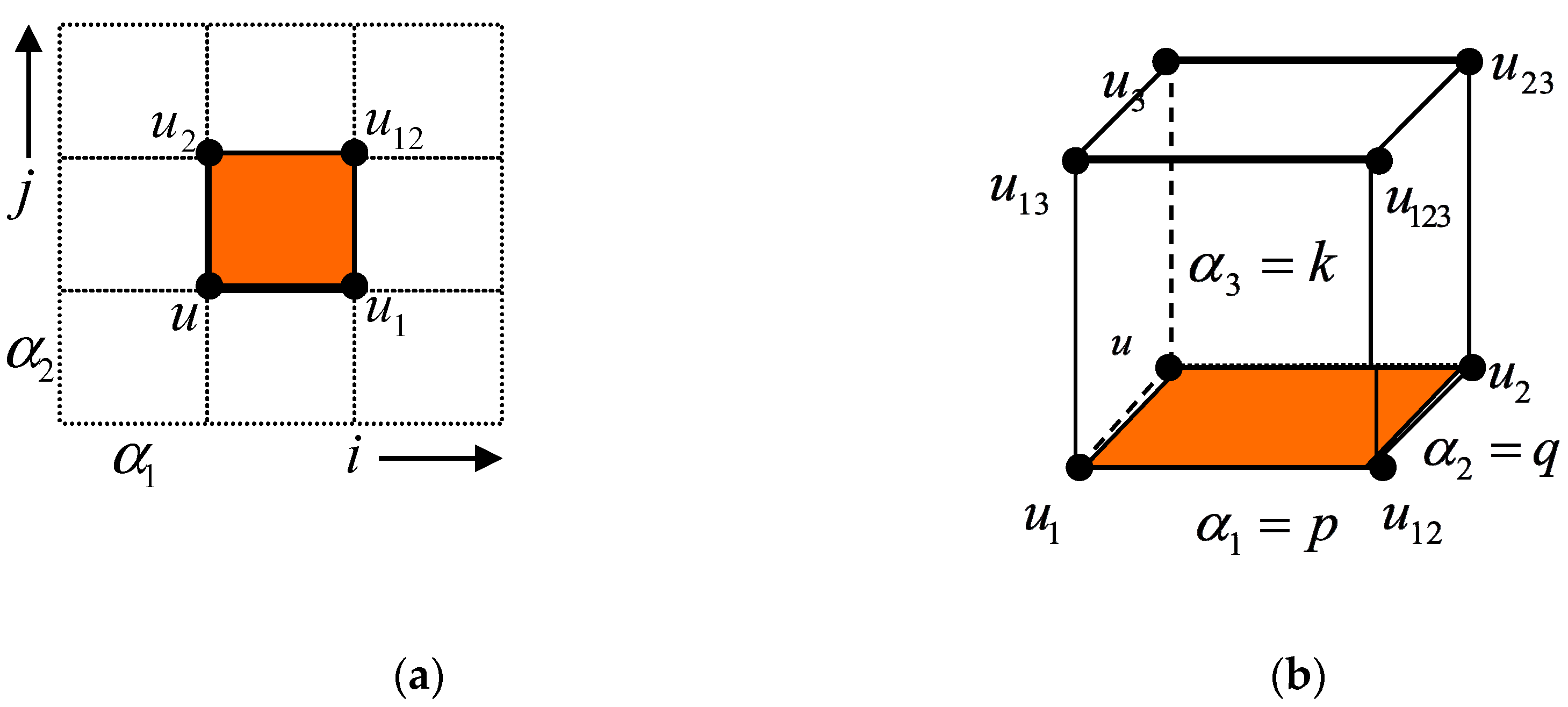
2.1. The CAC Properties of P∆E mKdV
2.2. Traveling Wave Solution for P∆E mKdV (O∆E mKdV)
- Integrable: The mapping has an integral Equation (13), . In other words, is evidently a constant of the mapping’s motion (the orbits of all points in the plane lie on the level sets given by where for any orbit is determined from the initial condition, i.e., .
- Measure-preserving: The mapping is measure-preserving, i.e.,where
- Reversible: There is exists a reversing symmetry such that . It’s means that is reversible (). Note that the mapping is an involution, i.e., , and is identity mapping. The reversibility property ensures that then mapping is invertible.
2.3. Construction of a Two-Dimensional Linear Map (Case Study: Sine-Gordon Map)
- The mapping has an integral equation (Equation (21)).
- is measure-preserving—i.e.,where
- There is a reversing symmetry such that (small circle denoting the symbol for composition). This means that is reversible ().
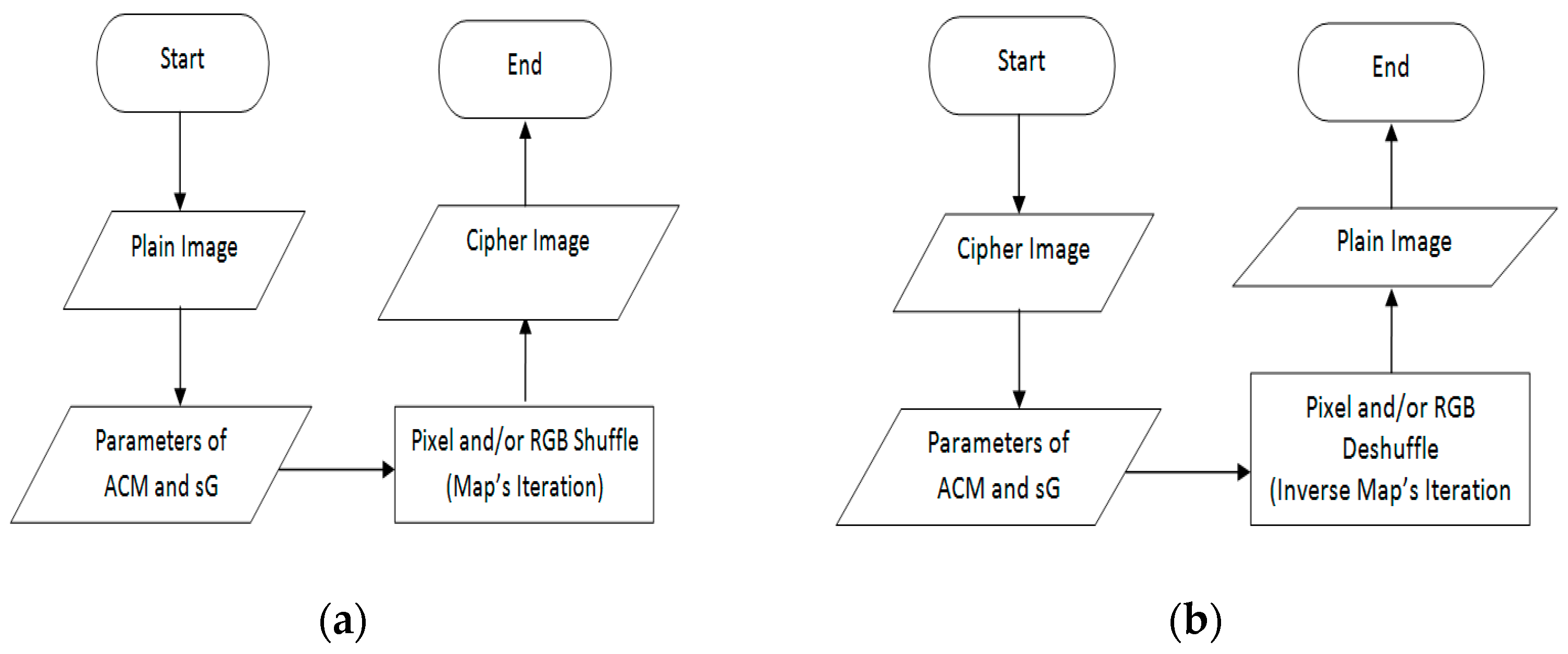
2.4. Encryption Scheme for Image Cryptography Based on a Mapping: A Case Study Involving ACM and a 2D Linear Sine-Gordon Map
| Algorithm 1: encryption algorithm |
| Input: |
| I: PlainImage (* Figure 2 *); |
| Procedure 2DPlanarMap (: real, numits, dimimage: integer): real; |
| (* numits = number of iterations, |
| and are the entry of matrix coefficient described in Equation (24) *); |
| Begin |
| For i = 1 to numits do |
| For j = 1 to dimimage do |
| Begin |
| ; |
| (* is the map described in Equation (24) and |
| *) |
| End {for j) |
| End {for i}; |
| End{2DPlanarMap } |
| Procedure Image_Transformation (2DPlanarMap:real, I: image): image; |
| Begin |
| Image_Transformation (I, 2DPlanarMap); |
| End{Image_Transformation } |
| {Main Program} |
| Begin |
| Read(I); |
| dimimage Imagedimension(I); |
| Read (, numits); |
| cipherby2DPlanarMap Image_Transformation; |
| Write (cipherby2DPlanarMap); |
| End{Main} |
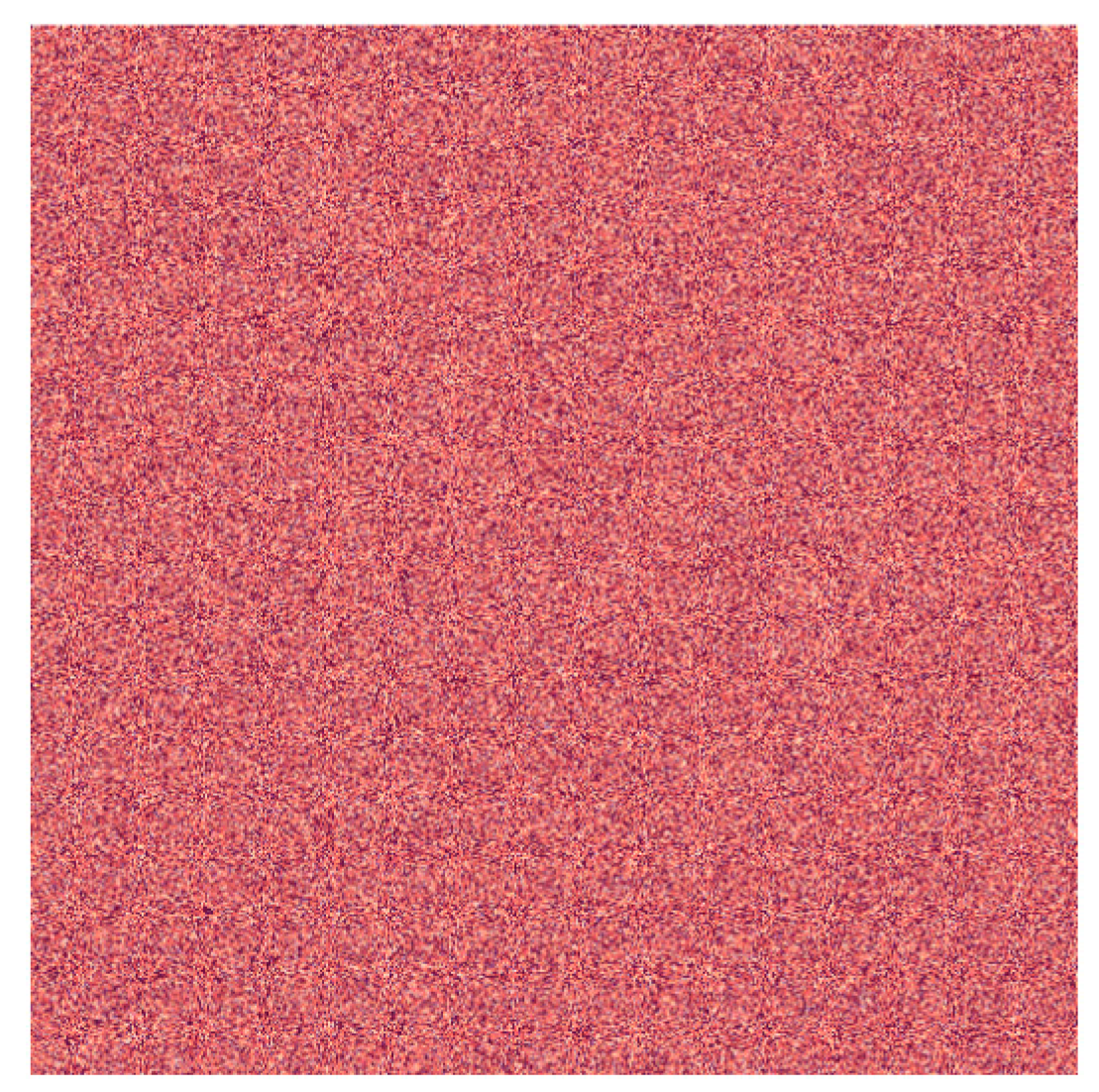
| Output: |
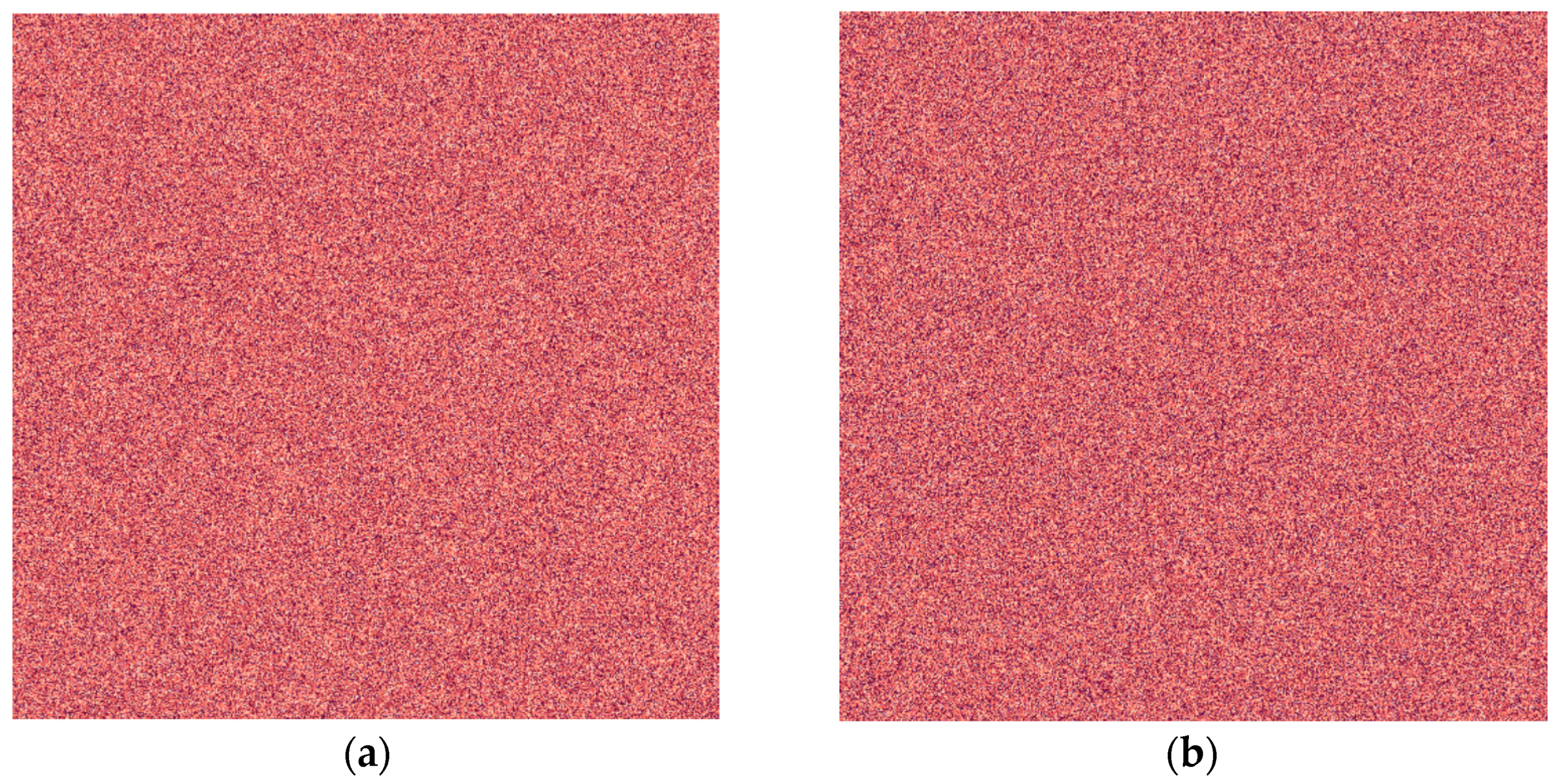
| chiperby2DPlanarMap: Cipher Image {Figures 4 and 8} |
3. Results and Discussion
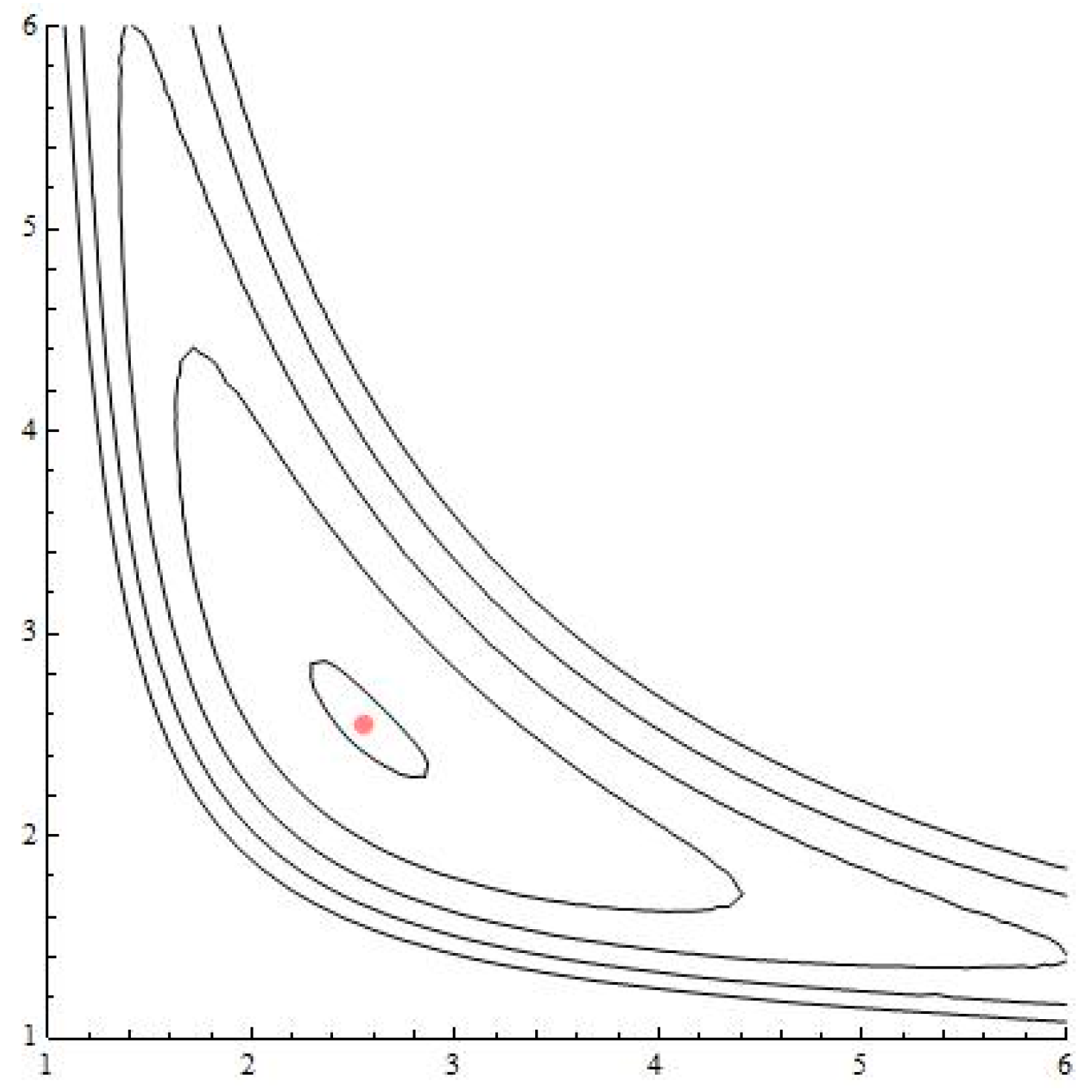
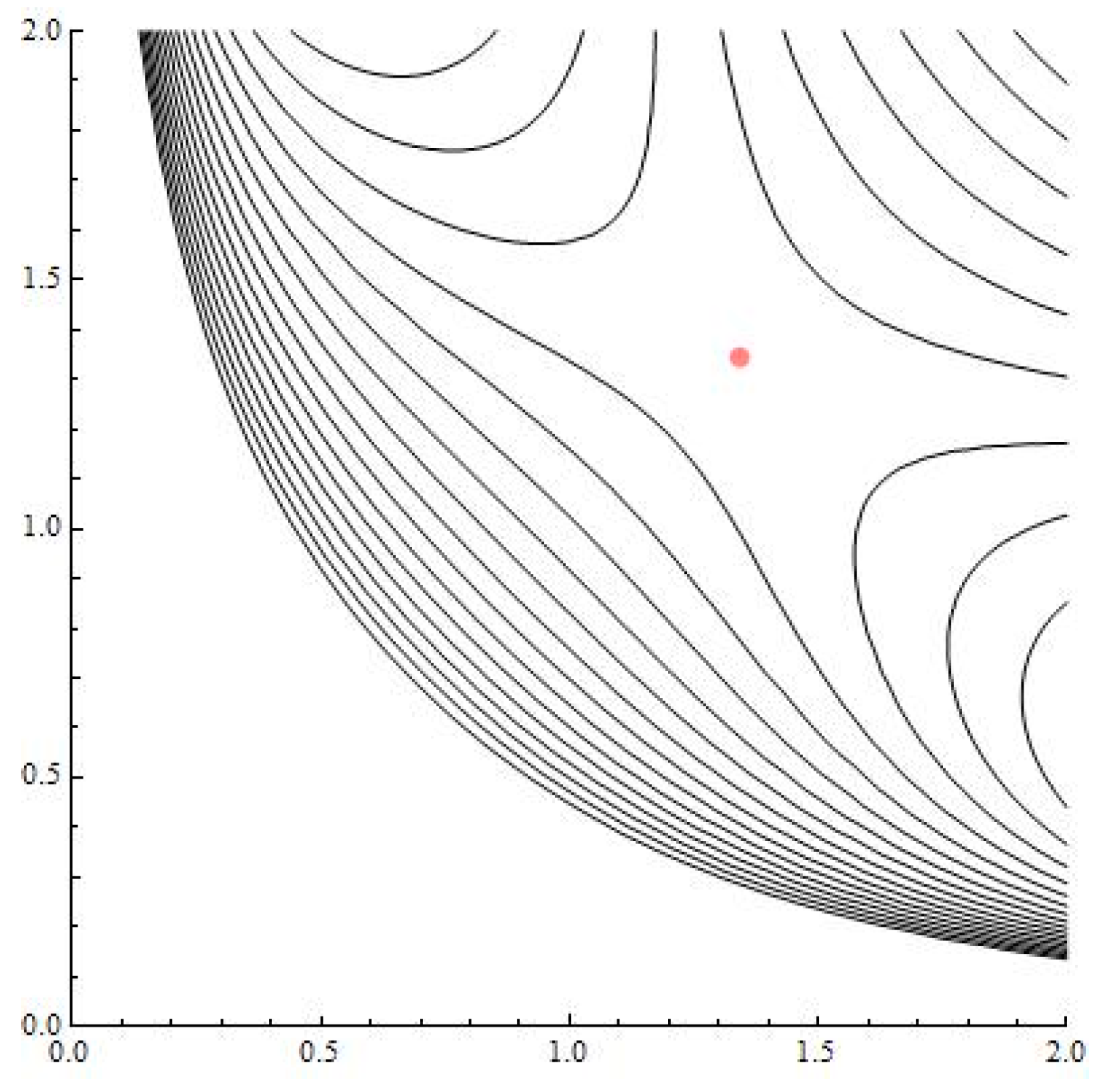
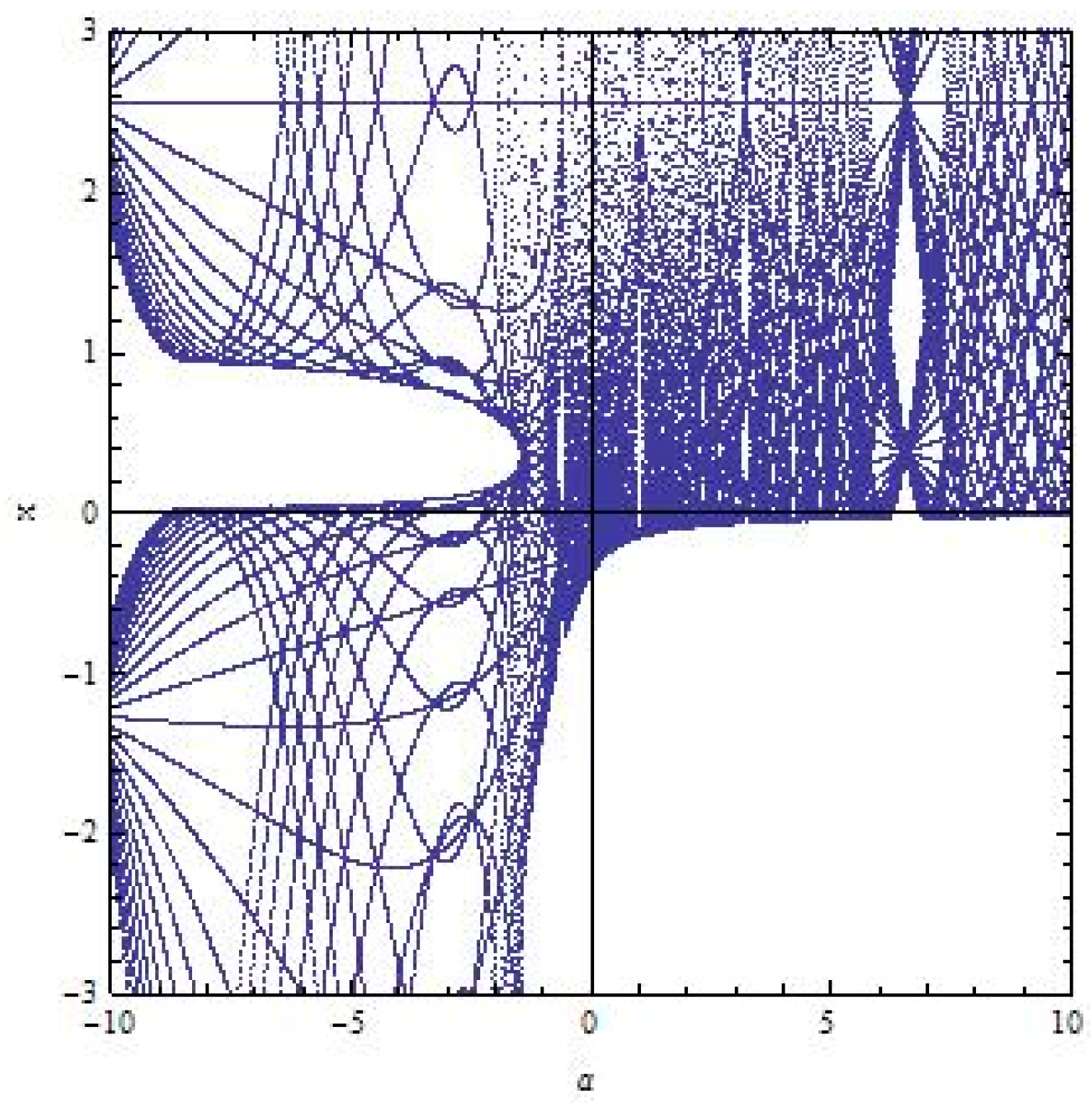
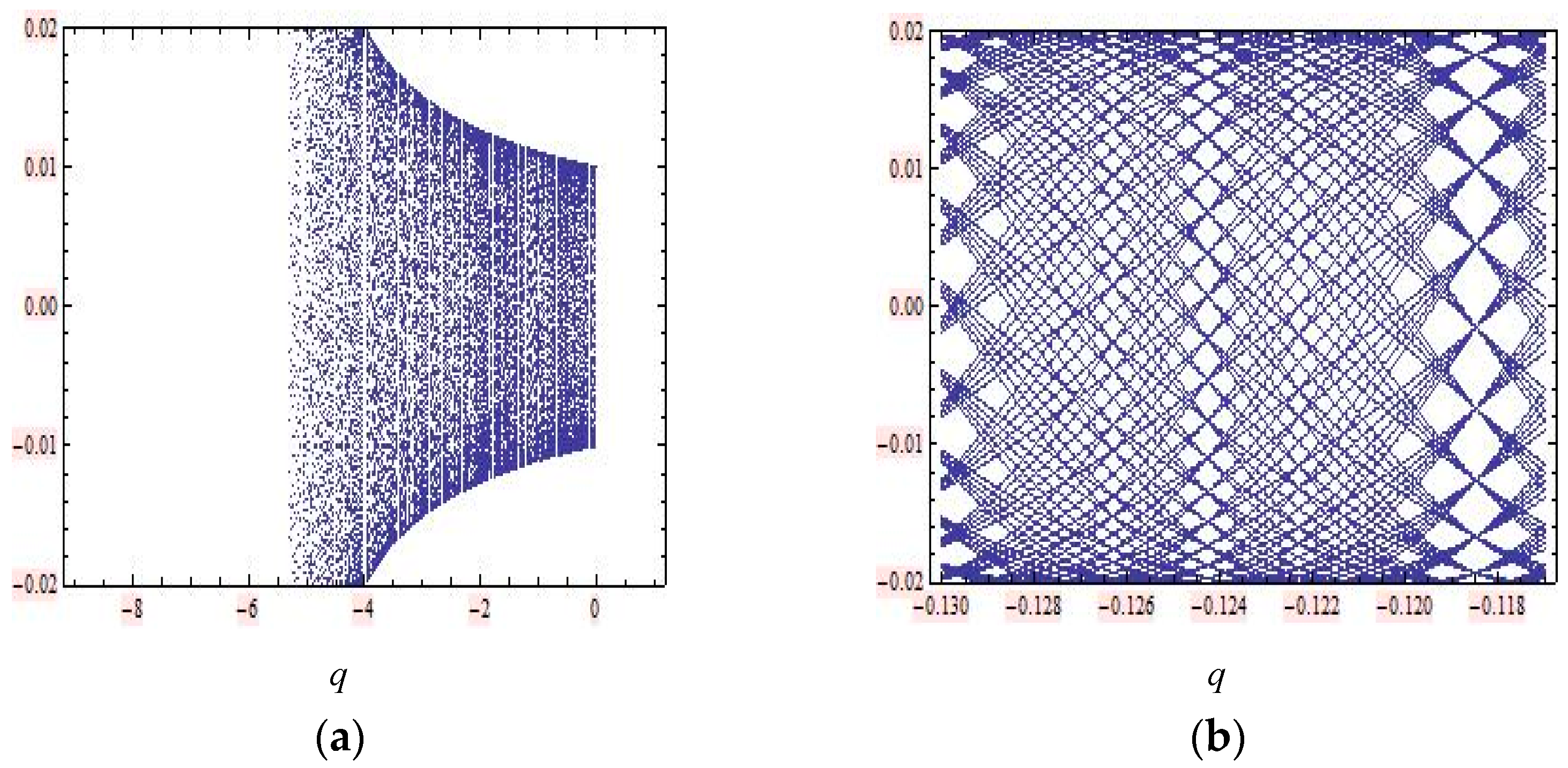
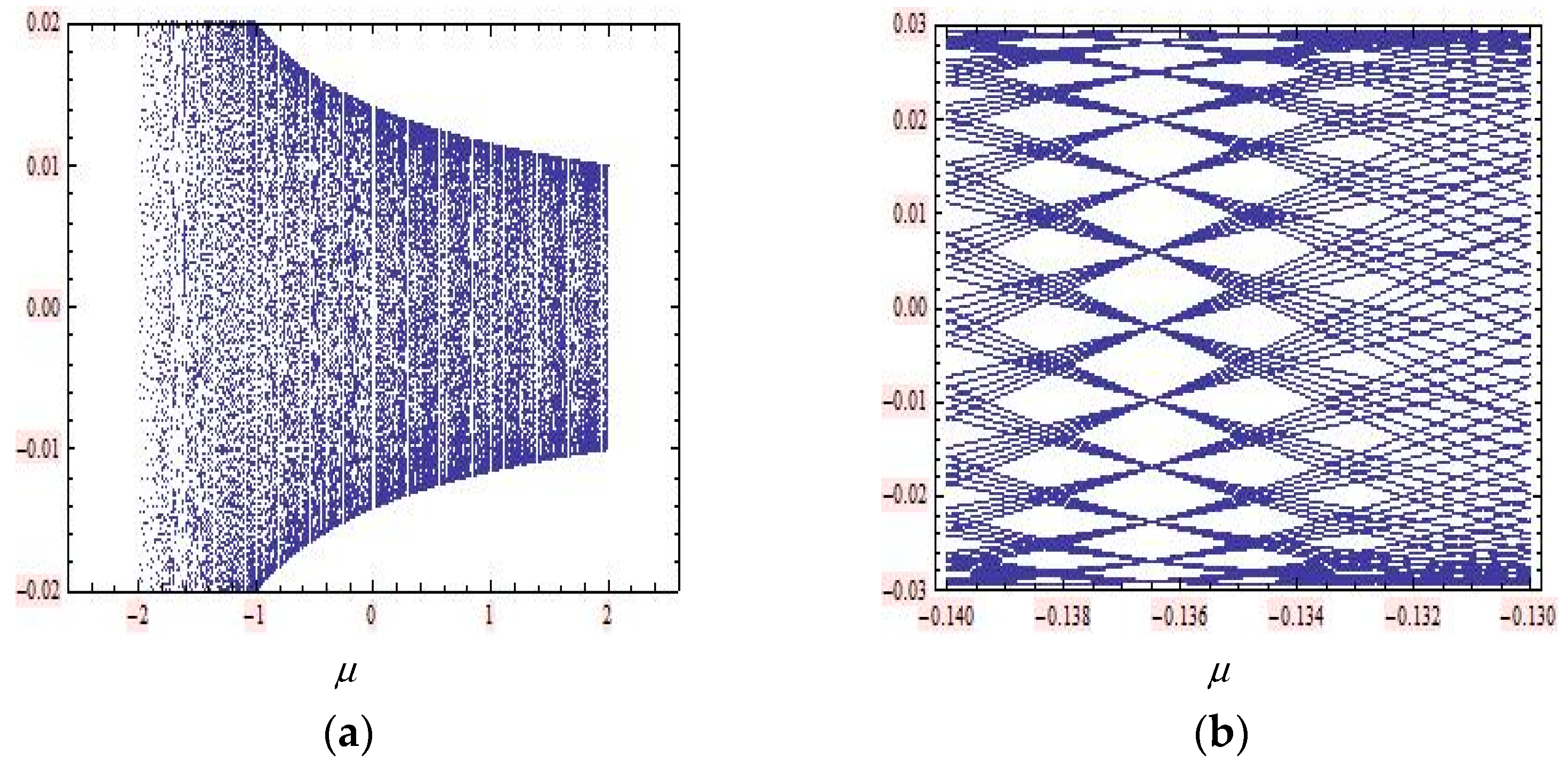
3.1. Dynamics and Bifurcation of the Two-Dimensional mKdV Nonlinear Map
- ,
- ,
- .
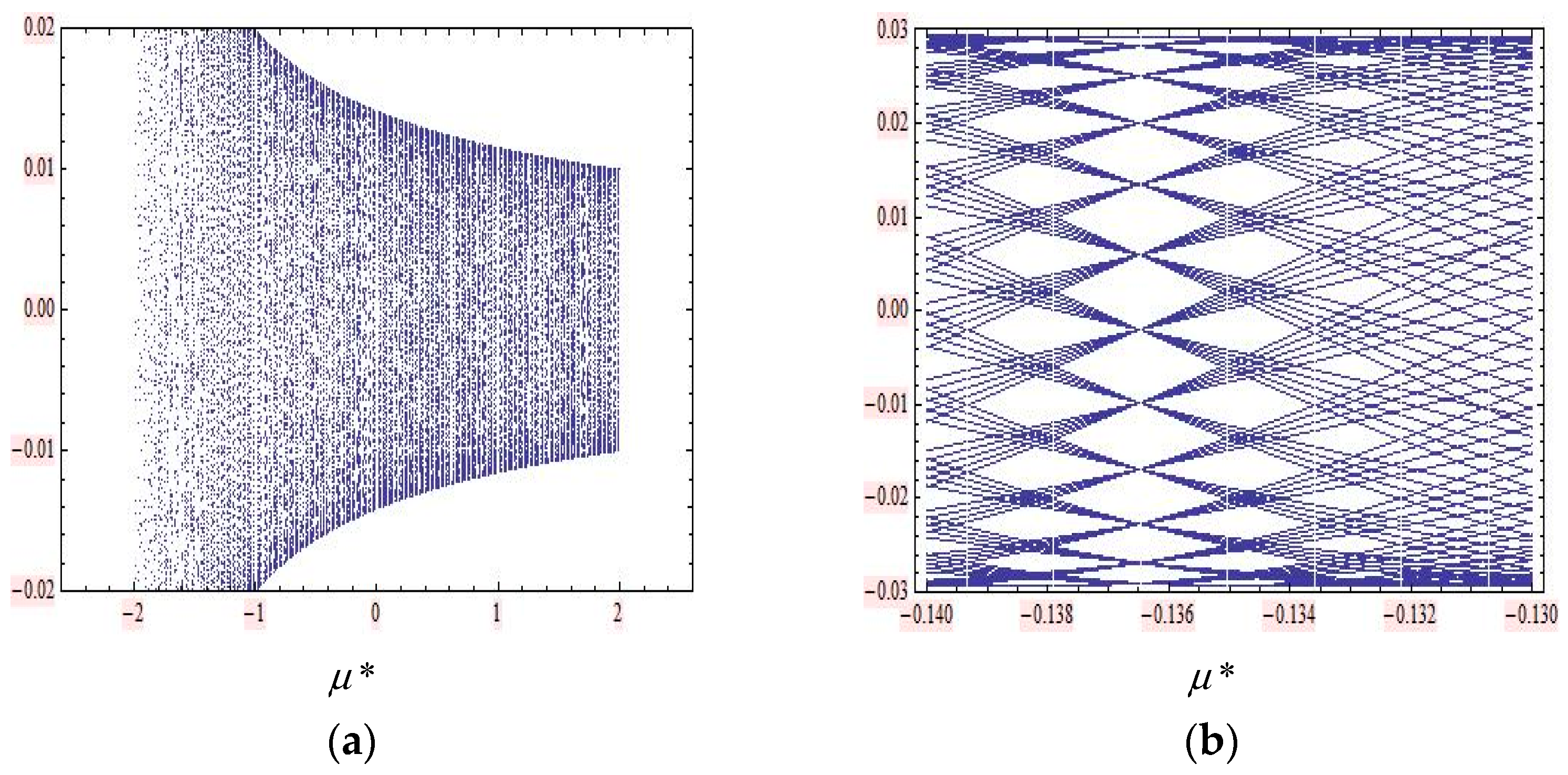
3.2. Two-Dimensional Linear Map Derived from a Nonlinear O∆E mKdV Map
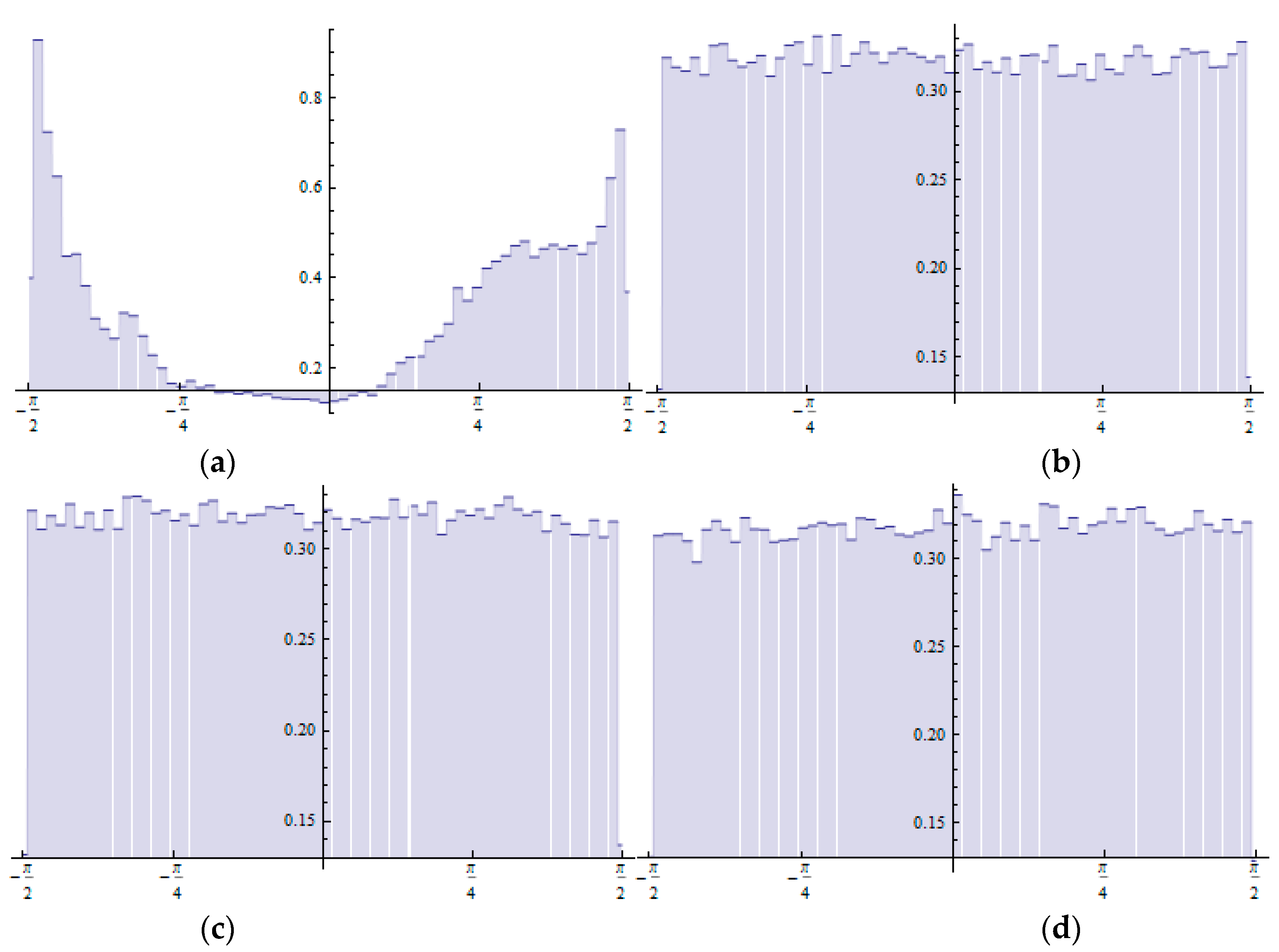
3.3. Histogram, Covariance, and Correlation Computations Based on the Weighted Data in the Image Pixels
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Elgamal, T. A public key cryptosystem and a signature scheme based on discrete logarithms. Lect. Notes Comput. Sci. (Incl. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform.) 1985, 31, 10–18. [Google Scholar]
- Munir, R. Algoritma enkripsi selektif citra digital dalam Ranah frekuensi berbasis permutasi chaos (digital image selective encryption algorithm in frequency domain based on chaos permutation). J. Rekayasa Elektr. 2015, 10, 66–72. [Google Scholar]
- Hidayat, A.D.; Afrianto, I. Sistem kriptografi citra digital pada jaringan intranet menggunakan metode kombinasi chaos map dan teknik selektif (digital image cryptography system on intranet network using combination method of chaos map and selective techniques). J. Ultim. 2017, 9, 59–66. [Google Scholar] [CrossRef]
- Ronsen, P.; Halim, A.; Syahputra, I. Enkripsi citra digital menggunakan Arnold’s cat map dan nonlinear chaotic algorithm (digital image encryption using Arnold’s cat map and nonlinear chaotic algorithm). JSM STMIK Mikroskil 2014, 15, 61–71. [Google Scholar]
- Soleymani, A.; Nordin, J.; Sundararajan, E. A chaotic cryptosystem for images based on Henon and Arnold cat map. Sci. World J. 2014, 2014, 1–21. [Google Scholar] [CrossRef]
- Abbas, N.A. Image encryption based on independent component analysis and Arnold’s cat map. Egypt. Inform. J. 2016, 17, 139–146. [Google Scholar] [CrossRef]
- Revanna, C.R.; Keshavamurthy, C. A secure document image encryption using mixed chaotic system. Int. J. Appl. Eng. Res. 2017, 12, 8854–8865. [Google Scholar]
- Abaas, S.A.; Shibeeb, A.K. A new approach for video encryption based on modified AES algorithm. IOSR J. Comput. Eng. 2015, 17, 44–51. [Google Scholar]
- IEEE-Indonesia; Munir, R. Robustness Analysis of Selective Image Encryption Algorithm Based on Arnold Cat Map Permutation. In Proceedings of the 3rd Makassar International Conference on Electrical Engineering and Informatics (MICEEI), Makassar, Indonesia, 28 November–1 December 2012; pp. 1–5. [Google Scholar]
- Fu, C.; Chen, Z.; Zhao, W.; Jiang, H. A New Fast Color Image Encryption Scheme Using Chen Chaotic System. In Proceedings of the International Conference on Software Engineering, Artificial Intelligence, Kazanawa, Japan, 26–28 June 2017; Networking and Parallel/Distributed Computing (SNPD 2017): Los Alamitors, CA, USA, 2017; pp. 121–126. [Google Scholar]
- Abbadi, N.K.E.; Yahya, E.; Aladilee, A. Digital RGB Image Encryption Based on 2D Cat Map and Shadow Numbers. In Proceedings of the Annual Conference on New Trends in Information & Communications Technology Applications (NTICT 2017), Baghdad, Iraq, 7–9 March 2017; IEEE: Pistacaway, NJ, USA, 2017; pp. 162–167. [Google Scholar]
- Tan, Y.-F.; Guo, X.; Tan, W.-N. Reversible data hiding using reference points coding. In Proceedings of the 2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 12–15 December 2017; pp. 55–59. [Google Scholar]
- Zakaria, L.; Notiragayu, N.; Nuryaman, A.; Suharsono, S. The integral normal form of a three-dimensional traveling wave solution mapping derived from generalized ∆∆-mKdV equation. Adv. Differ. Equ. Control Process. 2018, 19, 37–48. [Google Scholar] [CrossRef]
- Yuliani, E.; Zakaria, L. Asmiati A Two-Dimensional Map Derived From An Ordinary Difference Equation of mKdV and Its Properties. J. Phys. Conf. Ser. 2021, 1751, 012010. [Google Scholar] [CrossRef]
- Notiragayu, N.; Zakaria, L. The Implementation of Digital Text Coding Algorithm Through A Three Dimensional Mapping Derived from Generalized ΔΔ-mKdV Equation Using Mathematica. In Proceedings of the International Conference on Applied Sciences Mathematics and Informatics (ICASMI 2018), Bandar Lampung, Indonesia, 9–11 August 2018; Institute of Physics-UK: London, UK, 2019; Volume 1338, p. 7. [Google Scholar]
- Schief, W.K. Lattice geometry of the discrete darboux, KP, BKP, and CKP equations. Menelaus’ and Carnot’s theorems. J. Non-Linear Math. Phys. 2003, 10, 194–208. [Google Scholar] [CrossRef]
- Susanto, H.; Karjanto, N.; Zulkarnain; Nusantara, T.; Widjanarko, T. Soliton and breather splitting on star graphs from tricrystal josephson junctions. Symmetry 2019, 11, 271. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Ladik, J.F. Nonlinear differential-difference equations and Fourier analysis. J. Math. Phys. 1976, 17, 1011–1018. [Google Scholar] [CrossRef]
- Islam, S.; Khan, K.; Akbar, M.A. An analytical method for finding exact solutions of modified Korteweg–de Vries equation. Results Phys. 2015, 5, 131–135. [Google Scholar] [CrossRef]
- Das, A. Integrable Models (Work Scientific Lecture Notes in Physics); Work Scientific Publishing Co. Pte. Ltd.: Singapore, 1989; p. 30. [Google Scholar]
- Kou, X.; Zhang, D.J.; Shi, Y.; Zhao, S.L. Generating solutions to discrete Sine-Gordon equation from modified Backlund transformation. Commun. Theor. Phys. 2011, 55, 545–550. [Google Scholar] [CrossRef]
- der Kamp, P.H.V. Initial value problems for lattice equations. J. Phys. A Math. Theor. 2009, 42, 404–419. [Google Scholar] [CrossRef]
- Adler, V.; Bobenko, A.; Suris, Y. Classification of integrable equations on quad-graphs. The consistency approach. Commun. Math. Phys. 2003, 233, 513–543. [Google Scholar] [CrossRef]
- Hietarinta, J. Searching for CAC-maps. J. Nonlinear Math. Phys. 2005, 12, 223–230. [Google Scholar] [CrossRef]
- Zakaria, L.; Tuwankotta, J.M. Dynamics of A Re-Parametrization of A 2-Dimensional mapping derived from double discrete Sine-Gordon mapping. Int. J. Math. Eng. Manag. Sci. 2020, 5, 363–377. [Google Scholar] [CrossRef]
- Zakaria, L.; Tuwankotta, J.M. Dynamics and bifurcations in a two-dimensional map derived from a generalized\delta\delta-sine-gordon equation. Far East J. Dyn. Syst. 2016, 28, 165–194. [Google Scholar] [CrossRef]
- Quispel, G.; Capel, H.; Papageorgiou, V.; Nijhoff, F. Integrable mappings derived from soliton equations. Phys. A Stat. Mech. Its Appl. 1991, 173, 243–266. [Google Scholar] [CrossRef]
- Implementing Arnold’s Cat Map. Available online: https://mathematica.stackexchange.com/questions/164070/implementing-arnolds-cat-map (accessed on 22 July 2019).
- Kulenovic, M.R.S.; Merino, O. Discrete Dynamical Systems and Difference Equations with Mathematica; Chapman and Hall/CRC: Boca Raton, FL, USA, 2002. [Google Scholar]
- Mondal, B.; Behera, P.K.; Gangopadhyay, S. A secure image encryption scheme based on a novel 2D sine–cosine cross-chaotic (SC3) map. J. Real-Time Image Process. 2021, 18, 1–18. [Google Scholar] [CrossRef]
- Ali, M.; Saha, L. Local Lyapunov Exponents and characteristics of fixed/periodic points embedded within a chaotic attractor. J. Zhejiang Univ. A 2005, 6A, 296–304. [Google Scholar] [CrossRef]
- Mathematica Online: www. wolfram.com; Wolfram Research Inc.: Champaign, IL, USA, 2002.
- Ma, S.-Y.; Khalil, A.; Hajjdiab, H.; Eleuch, H. Quantum dilation and erosion. Appl. Sci. 2020, 10, 4040. [Google Scholar] [CrossRef]
- Yu, J.; Xie, Y.; Guo, S.; Zhou, Y.; Wang, E. Parallel encryzption of noisy images based on sequence generator and chaotic measurement matrix. Complexity 2020, 2020, 1–18. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Covariance | Correlation | |
|---|---|---|
| Plain Image (Figure 2) | 0.000919690 | 0.024302828 |
| Cipher Image Generated by Equation (24) (Figure 4a) | −0.000001413 | −0.000078930 |
| Cipher Image Generated by Equation (23) (Figure 4b) | 0.000005278 | 0.000295260 |
| No. | α | Fix Point | Fixed Point Positions |
|---|---|---|---|
| 1. | |||
| 2. | |||
| 3. |
| No. | 2D Linear Map | LE: | LN: | |
|---|---|---|---|---|
| 1. | ACM | (0.001, 0.001) | 0.9533117189 | 2.59428699560 |
| 2. | sine-Gordon | (0.001, 0.001) | 6.6821101678 | 798.001253131 |
| 3. | mKdV | (0.001, 0.001) | 0.7638455683 | 2.14651493883 |
| Covariance | Correlation | |
|---|---|---|
| Plain Image | 0.001048070 | 0.01704610 |
| Cipher Image Generated by Equation (24) | 0.000202934 | 0.00928261 |
| Cipher Image Generated by Equation (23) | 0.000042265 | 0.00187458 |
| Cipher Image Generated by Equation (31) | −0.00000098 | −0.00041965 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zakaria, L.; Yuliani, E.; Asmiati, A. A Two-Dimensional mKdV Linear Map and Its Application in Digital Image Cryptography. Algorithms 2021, 14, 124. https://doi.org/10.3390/a14040124
Zakaria L, Yuliani E, Asmiati A. A Two-Dimensional mKdV Linear Map and Its Application in Digital Image Cryptography. Algorithms. 2021; 14(4):124. https://doi.org/10.3390/a14040124
Chicago/Turabian StyleZakaria, La, Endah Yuliani, and Asmiati Asmiati. 2021. "A Two-Dimensional mKdV Linear Map and Its Application in Digital Image Cryptography" Algorithms 14, no. 4: 124. https://doi.org/10.3390/a14040124
APA StyleZakaria, L., Yuliani, E., & Asmiati, A. (2021). A Two-Dimensional mKdV Linear Map and Its Application in Digital Image Cryptography. Algorithms, 14(4), 124. https://doi.org/10.3390/a14040124