
Quadratic Model-Based Dynamically Updated PID Control of CSTR System with Varying Parameters †


Abstract
1. Introduction
2. Methods
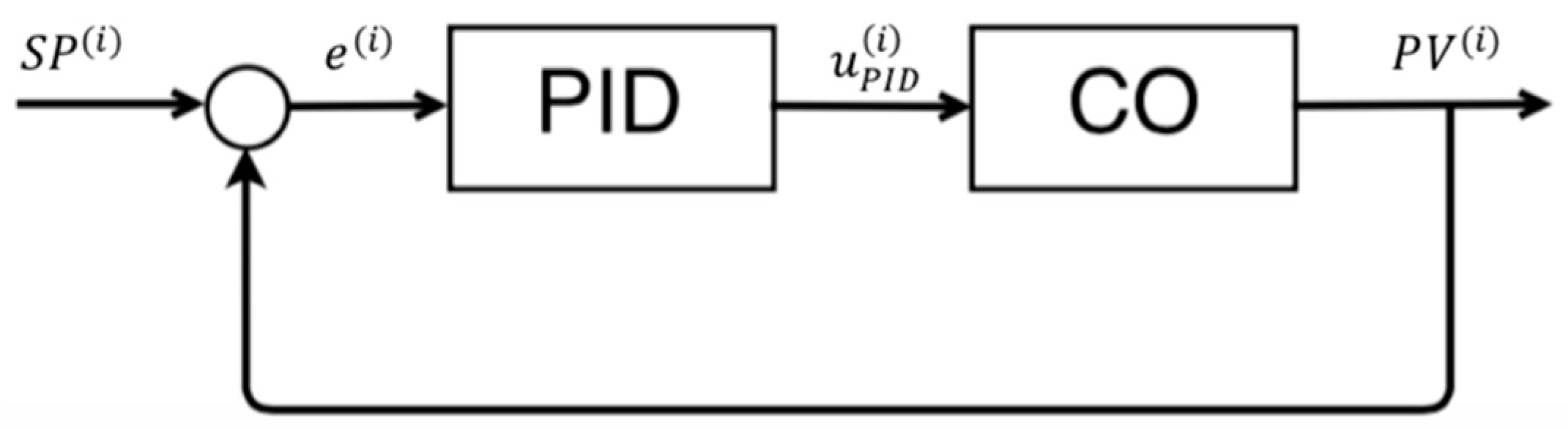
2.1. The PID Controller
2.2. The DUPID Control Scheme
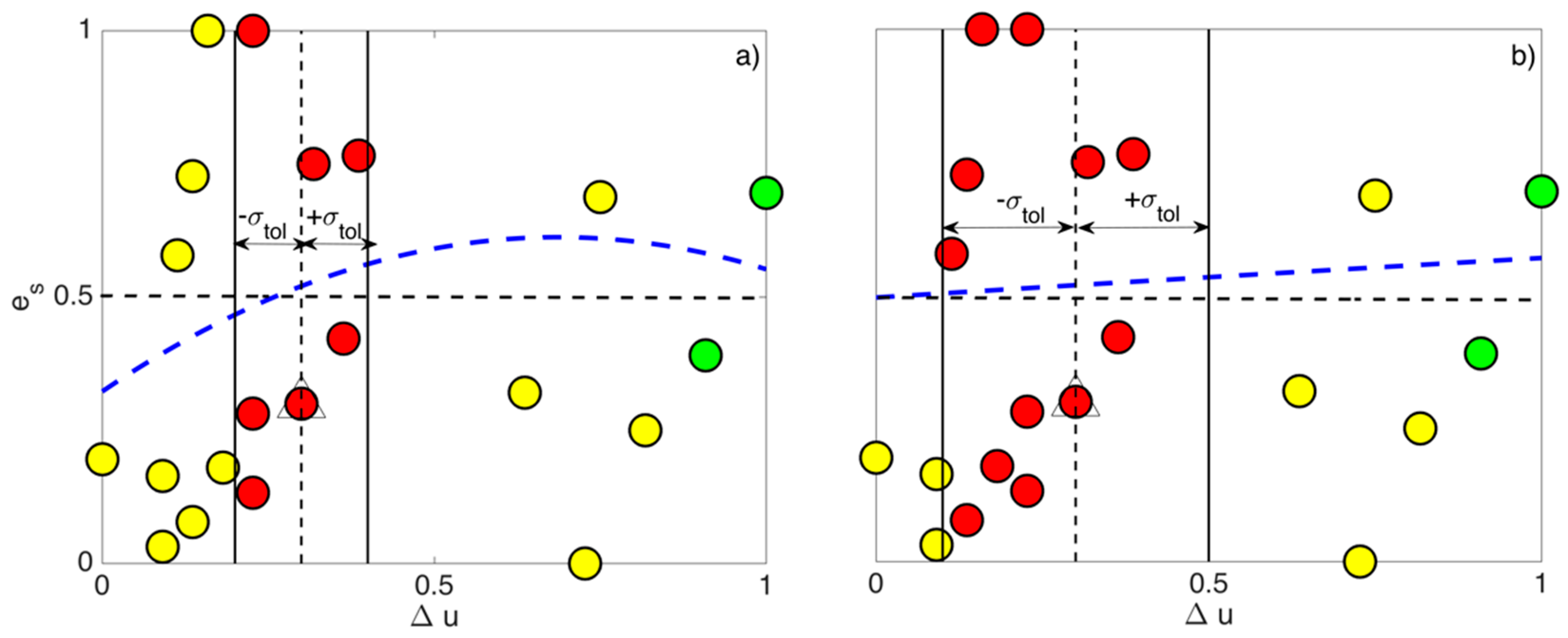
2.2.1. The 1D DUPID Controller
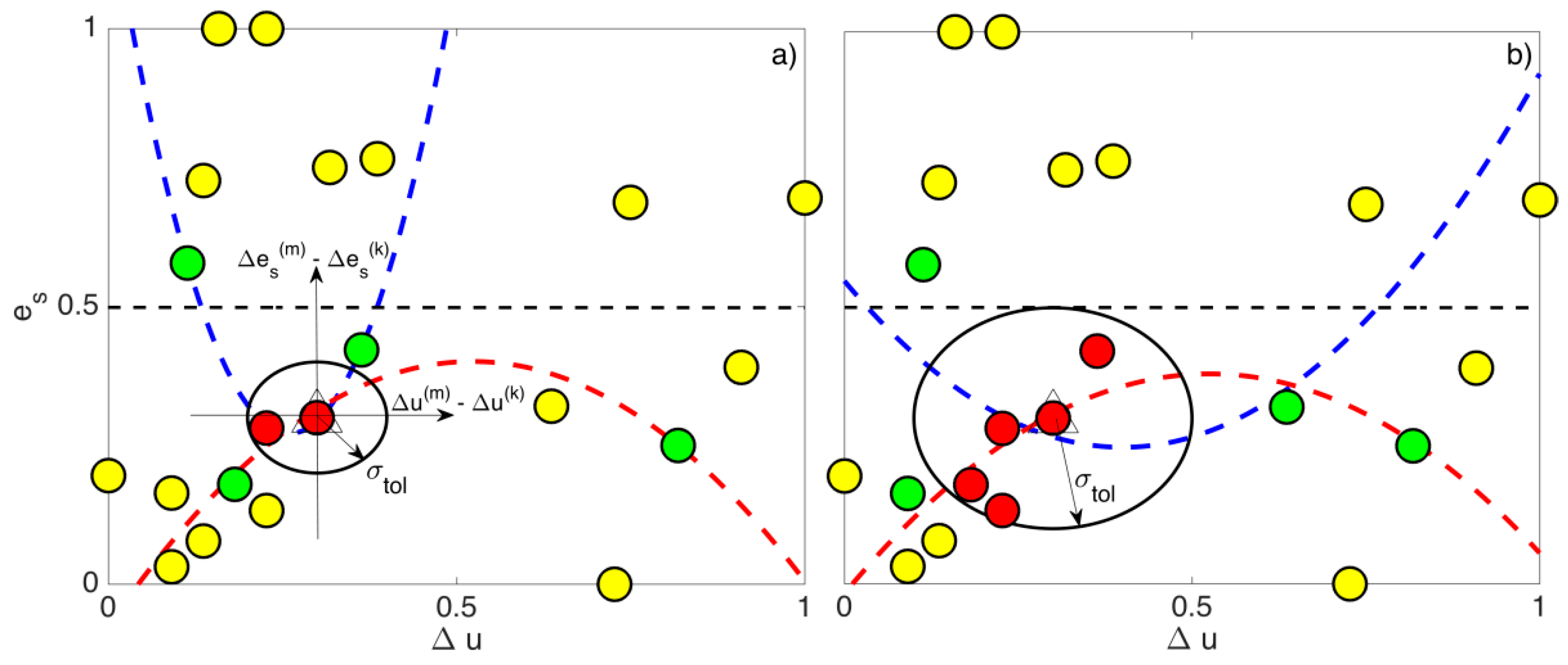
2.2.2. The 2D DUPID Controller
- Both constructed models intersect with the zero error axis. The total number of roots, in this case, is ;
- Just one of the constructed models intersects with the zero error axis. The total number of roots, in this case, is ;
- None of the constructed models intersects with the zero error value. Consequently, the next incremental value is chosen as the minimum value of the model that predicts the smallest error.
3. Results
3.1. Case Study
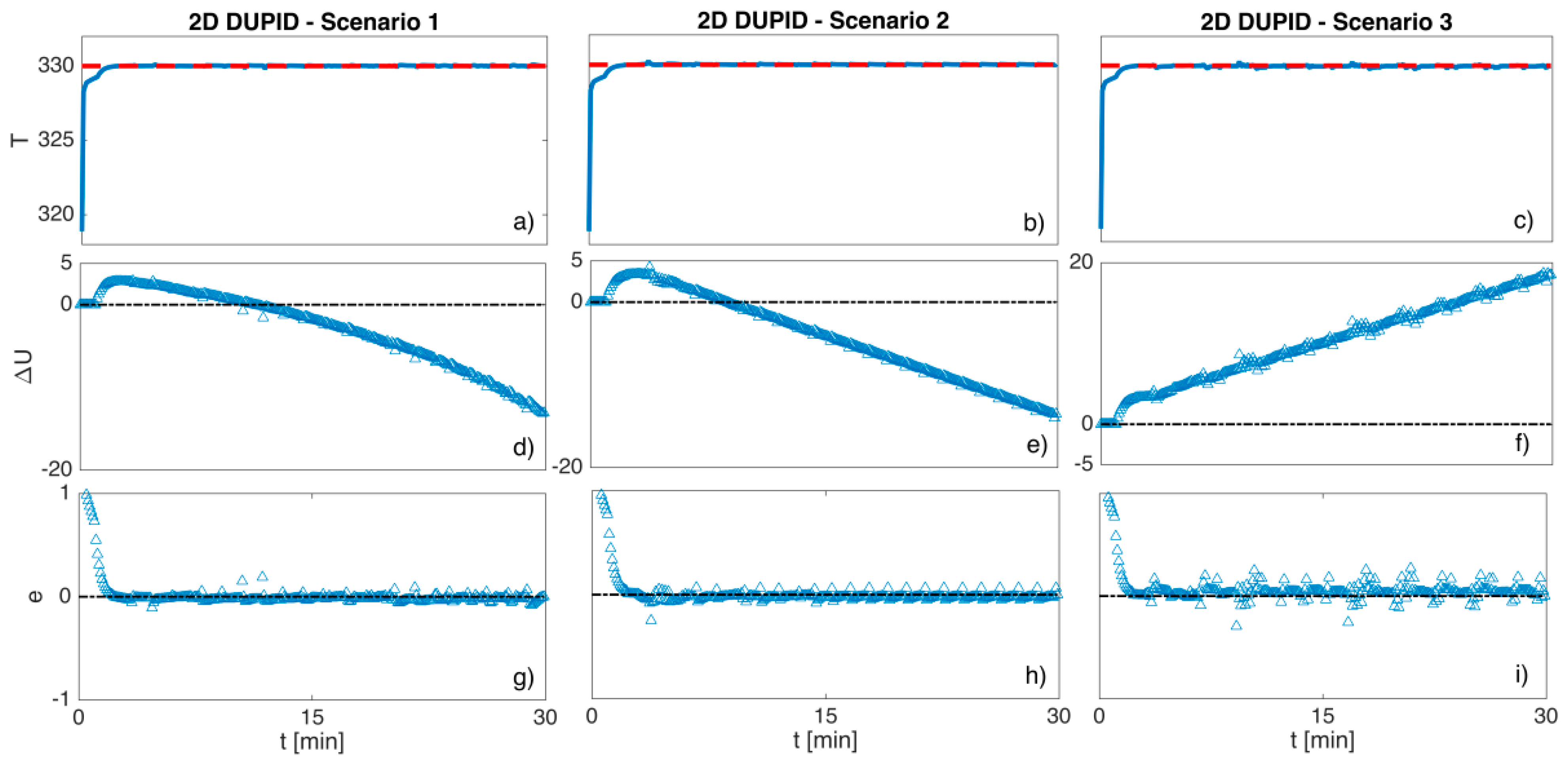
3.2. Simulation Results and Discussion
- In the first scenario (Scenario 1), it is assumed that the heat transfer coefficient linearly drops to 50% of its initial value. Therefore, the value of was assumed to be 0.0167.
- In the second scenario (Scenario 2), it is assumed that the feed temperature linearly increases for of its initial value, . The value of is .
- In the third scenario (Scenario 3), it is assumed that the feed temperature linearly drops for of its initial value The value of is .
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Åström, K.J.; Hägglund, T.; Astrom, K.J. Advanced PID Control. vol. 461. ISA-The Instrumentation, Systems, and Automation Society Research Triangle. 2006. Available online: https://www.researchgate.net/publication/3207690_Advanced_PID_Control_-_Book_Review (accessed on 19 January 2021).
- Rotach, V.Y. Teoriya Avtomaticheskogo Upravleniya: Uchebnik dlya VUZov (Automated Control Theory: University Textbook), 5th ed.; MEI Publishing House: Moscow, Russia, 2008. [Google Scholar]
- Fahmy, R.A.; Badr, R.I.; Rahman, F.A. Adaptive PID Controller Using RLS for SISO Stable and Unstable Systems. Adv. Power Electron. 2014, 2014, 1–5. [Google Scholar] [CrossRef]
- Ziegler, J.G.; Nichols, N.B. Optimum Settings for Automatic Controllers. J. Dyn. Syst. Meas. Control. 1993, 115, 220–222. [Google Scholar] [CrossRef]
- Haykin, S.S. Adaptive Filter Theory; Pearson Education India: Chennai, India, 2008. [Google Scholar]
- Åström, K.J.; Wittenmark, B. Adaptive Control; Courier Corporation: North Chelmsford, MA, USA, 2013. [Google Scholar]
- Tian, B.; Su, H.; Chu, J. An optimal self-tuning PID controller considering parameter estimation uncertainty. In Proceedings of the 3rd World Congress on Intelligent Control and Automation (Cat. No.00EX393), Hefei, China, 26 June–2 July 2000; pp. 3107–3111. [Google Scholar] [CrossRef]
- Martínez, J.I.O.; Paz Ramos, M.; Garibo, S.; Luna-Ortega, C. PI controller with dynamic gains calculation to comply with time specs in presence of parametric disturbances. In Proceedings of the 6th International Conference Electrical Engineering, Computing Science and Automatic Control, Toluca, Mexico, 10–13 November 2009. [Google Scholar]
- Xiao, S.; Li, Y.; Liu, J. A model reference adaptive PID control for electromagnetic actuated micro-positioning stage. In Proceedings of the 2012 IEEE International Conference on Automation Science and Engineering (CASE), Seoul, Korea, 20–24 August 2012; pp. 97–102. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.721.2583&rep=rep1&type=pdf (accessed on 19 January 2021).
- Petersen, I.R.; Tempo, R. Robust control of uncertain systems: Classical results and recent developments. Automatica 2014, 50, 1315–1335. [Google Scholar] [CrossRef]
- Vilanova, R.; Alfaro, V.M.; Arrieta, O. Robustness in PID Control. In PID Control in the Third Millennium; Springer: London, UK, 2012; pp. 113–145. [Google Scholar]
- Morari, M.; Zafiriou, E. Robust Process Control. 1989. Available online: https://cse.sc.edu/~gatzke/cache/morari-zafiriou-PI-chapters1-3.pdf (accessed on 19 January 2021).
- Lee, Y.; Park, S.; Lee, M.; Brosilow, C. PID controller tuning for desired closed-loop responses for SI/SO systems. AIChE J. 1998, 44, 106–115. [Google Scholar] [CrossRef]
- Ge, M.; Chiu, M.-S.; Wang, Q.-G. Robust PID controller design via LMI approach. J. Process. Control 2002, 12, 3–13. [Google Scholar] [CrossRef]
- Garpinger, O.; Hägglund, T. A Software Tool for Robust PID Design. IFAC Proc. Vol. 2008, 41, 6416–6421. [Google Scholar] [CrossRef]
- Mercader, P.; Astrom, K.J.; Banos, A.; Hagglund, T. Robust PID Design Based on QFT and Convex–Concave Optimization. IEEE Trans. Control. Syst. Technol. 2016, 25, 441–452. [Google Scholar] [CrossRef]
- Stavrov, D.; Nadzinski, G.; Stojanovski, G.; Deskovski, S. Performance analysis of DUPID control over CSTR sys-tem with varying parameters. In Proceedings of the 14th International Conference ETAI, Struga, Macedonia, 20–22 September 2018; pp. 2545–4889. [Google Scholar]
- Wenzel, S.; Gao, W.; Engell, S. Handling Disturbances in Modifier Adaptation with Quadratic Approximation. The research leading to these results was funded by the ERC Ad-vanced Investigator Grant MOBOCON under the grant agreement No. 291458. IFAC-PapersOnLine 2015, 48, 132–137. [Google Scholar] [CrossRef]
- Wenzel, S.; Paulen, R.; Engell, S. Quadratic Approximation in Price-Based Coordination of Constrained Systems-of-Systems. Focapo/cpc. 2017. Available online: http://folk.ntnu.no/skoge/prost/proceedings/focapo-cpc-2017/FOCAPO-CPC%202017%20Contributed%20Papers/92_CPC_Contributed.pdf (accessed on 19 January 2021).
- Seborg, D.E.; Mellichamp, D.A.; Edgar, T.F.; Doyle, F.J., III. Process Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules; Imperial College Press: London, UK, 2009. [Google Scholar]
- Brunton, S.L.; Kutz, J.N. Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control, 1st ed.; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Alvarez, J.; Alvarez-Ramirez, J. Linear PI control of batch exothermic reactors with temperature measurement. Int. J. Robust Nonlinear Control 2006, 16, 113–131. [Google Scholar] [CrossRef]
- Nikravesh, M.; Farell, A.E.; Stanford, T.G. Control of nonisothermal CSTR with time varying parameters via dy-namic neural network control (DNNC). Chem. Eng. J. 2000, 76, 1–16. [Google Scholar] [CrossRef]
- Bucz, Š.; Kozáková, A. Advanced methods of PID controller tuning for specified performance. PID Control Ind. Process 2018, 73–119. Available online: https://www.intechopen.com/books/pid-control-for-industrial-processes/advanced-methods-of-pid-controller-tuning-for-specified-performance (accessed on 19 January 2021).
- Yu, C.-C. Autotuning of PID Controllers: A Relay Feedback Approach; Springer Science & Business Media: Berlin, Germany, 2006. [Google Scholar]
- Alvarez-Ramirez, J. Global stabilization of chemical reactors with classical PI control. Int. J. Robust Nonlinear Control IFAC Affil. J. 2001, 11, 735–747. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| [250, 350] K |
| (a) | Time in sec. | ||
|---|---|---|---|
| Scen. | 1D | 2D | RD |
| 1 | 0.0436 | 0.1007 | 0.5670 |
| 2 | 0.0497 | 0.1105 | 0.5502 |
| 3 | 0.0514 | 0.1070 | 0.5196 |
| (b) | IAE values | ||
| Scen. | 1D | 2D | PID |
| 1 | 0.1002 | 0.1005 | 0.2529 |
| 2 | 0.1066 | 0.1084 | 0.2781 |
| 3 | 0.1097 | 0.1337 | 0.2960 |
| (c) | RD values | ||
| Scen. | 1D/2D | 1D/PID | 2D/PID |
| 1 | 0.0030 | 0.6038 | 0.6026 |
| 2 | 0.0166 | 0.6167 | 0.6102 |
| 3 | 0.1795 | 0.6294 | 0.5483 |
| Avg. | 0.0664 | 0.6166 | 0.5870 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stavrov, D.; Nadzinski, G.; Deskovski, S.; Stankovski, M. Quadratic Model-Based Dynamically Updated PID Control of CSTR System with Varying Parameters. Algorithms 2021, 14, 31. https://doi.org/10.3390/a14020031
Stavrov D, Nadzinski G, Deskovski S, Stankovski M. Quadratic Model-Based Dynamically Updated PID Control of CSTR System with Varying Parameters. Algorithms. 2021; 14(2):31. https://doi.org/10.3390/a14020031
Chicago/Turabian StyleStavrov, Dushko, Gorjan Nadzinski, Stojche Deskovski, and Mile Stankovski. 2021. "Quadratic Model-Based Dynamically Updated PID Control of CSTR System with Varying Parameters" Algorithms 14, no. 2: 31. https://doi.org/10.3390/a14020031
APA StyleStavrov, D., Nadzinski, G., Deskovski, S., & Stankovski, M. (2021). Quadratic Model-Based Dynamically Updated PID Control of CSTR System with Varying Parameters. Algorithms, 14(2), 31. https://doi.org/10.3390/a14020031