1. Introduction
This paper concerns tuning of PI controllers based on Integrator Plus Time Delay (IPTD) models/systems. Further details and developments regarding the
-tuning algorithm are presented in the work [
1,
2]. IPTD processes and close-to IPTD systems are important/typical processes/systems found in the industry. Instances of IPTD processes are pulp and paper mills, oil water gas separators, communication networks, level systems and all lag-dominant processes, which may be approximated by IPTD models (see, e.g., [
3,
4,
5]). Reported instances are high-purity distillation columns where there are relatively large time constants for minor differences in the reference, and where the time delay comes from an analyser (see, e.g., [
6,
7]). In Section 6.4 in [
8], an example of reboiler control in connection with a distillation column was presented.
The majority of existing PI controller tuning rules for IPTD processes,
may be written as the following setting
where
is the PI controller proportional gain,
is the integral time constant,
k is the gain velocity (slope) and
is the time delay.
and
in Equation (
2) are dimensionless parameters. For instance, using the classical Ziegler–Nichols (ZN) PI controller tuning rules, proposed in the works [
9,
10,
11], gives
,
(i.e., the ZN closed loop method). Using the Internal Model Control (IMC) PI controller tuning rules in
Table 1 of [
7] with closed loop time constant
, as proposed in [
6], gives parameters
and
. Using the Simple/Skogestad IMC (SIMC) PI controller tuning rules, presented in the works of [
8,
12,
13], with closed loop time constant
(i.e., is the only tuning parameter in SIMC) gives
and
.
To find PI controller settings with good robustness properties (i.e., one could have uncertainties in the gain velocity and time delay) and simultaneously obtain reasonable fast reference and disturbance properties, for IPTD processes, the size and balanced relation between the parameters and are of importance.
Using the PI controller setting in Equation (
2), we may define a Method Product (MP) parameter
as,
The defined MP parameter
in Equation (
3) is constant for numerous PI controller tuning methods. The SIMC PI controller settings yield an MP parameter
. The original ZN method gives an MP parameter
(i.e., the ZN closed loop method).
In this paper, we search for optimal MP parameters, i.e., choosing
which ensures the closed loop system some optimal robustness or performance setting, e.g., minimisation of the Integrated Absolute Error (IAE) or sensitivity index
given a prescribed robustness.
Figure 1 shows that
is approximately minimised for
. However, it might be argued that the changes in
is negligible, and that
is optimal over the MP parameter interval
.
It has been pointed out that there is usually a high degree of trial-and-error in choosing the closed loop time constant tuning parameter
in SIMC and IMC (e.g., [
1] for SIMC and [
6] for IMC). Note that one also may focus on the maximum sensitivity peak
of the sensitivity function as described in [
14], where some inequalities relating to the Gain Margin (GM) and the Phase Margin (PM) to the robustness
are proposed on p. 126. Consider that the values of the minimum robustness
are in the interval
[
14].
The contributions of this work are itemised in the incoming:
The rest of this paper is organised as follows. The preliminary theory containing the definitions and some basic theory are given in
Section 2. In
Section 3, we present analytical results about the MTDE and present PI controller tuning rules as a function of a prescribed MTDE. Numerical simulation examples for some (possible) higher order systems/models are presented in
Section 5. The conclusion and discussion remarks are given in
Section 7.
3. Tuning for Maximum Time Delay Error
To get some understanding of the PM of the closed loop system and the MTDE, , we work out some analytic results in the following, which give a PI controller tuning method for IPTD processes.
3.1. Integrator Plus Time Delay Process
Consider an IPTD system where
k is the gain velocity and
is the time delay, and a PI controller. The loop transfer function,
, is
The frequency response is given by , where the magnitude is and the phase angle is . We obtain the gain crossover frequency analytically as . From this, we obtain analytically that , and the MTDE , such that, .
The gain crossover frequency is analytically given by
See previous paper [
1] for proof of Equation (
17).
The gain crossover frequency is then given by
. We obtain the PM analytically as
, and the MTDE as
, where
is defined as
Consider the instance in which the MP parameter
is constant, then Equation (
18) may be written as,
, and,
, where
is a function of
and constant. Notice that the parameter
f is defined by Equation (
16).
We have the following Algorithm 1.
Algorithm 1 (Max time delay error tuning).
The MP parameter is defined as We express β as a linear function of a prescribed Relative Time Delay Error (RTDE) , to ensure stability of the closed loop system. We havewhere parameter a is given by Equation (19). Note that α can be expressed byor with regard to the PI controller parameters Note that Algorithm 1 is written as a MATLAB m-file function given in Appendix C in a previous paper [
1].
Before advancing, we demonstrate the above algorithm in an instance to enhance the robustness of the classical closed loop ZN PI controller tuning.
Example 1 (ZN with increased margins).
Given the classical ZN PI controller tuning (closed loop method), in which , , where the RTDE and the robustness .
For the original ZN method, we have the MP parameter . Specifying an RTDE parameter, . Using Equations (21) and (22) gives the altered ZN PI controller parameters The altered ZN PI controller tuning, and , for an IPTD process has margins , robustness and prescribed . The altered ZN PI controller tuning has relatively smooth closed loop responses with a relative damping slightly less than one. The ZN method parameter is not too far from one of the recommended optimal parameters (see below).
Arguably, the most important characteristic of a PI controller setting is the robustness vs. model uncertainty in connection with a reasonably smooth and fast closed loop reference and disturbance responses. An MTDE
is reasonable. This is approximately equal to the MTDE for the SIMC setting,
. One idea may be to find theoretical arguments for setting the MP parameter
such that the closed loop system gets some optimal settings, e.g., minimise the robustness
given prescribed robustness
. Consider using the PI controller tuning rules deduced in [
1] which gives the MP parameter
.
The MP parameter
may be seen as a tuning parameter. SIMC uses a MP parameter
and the corresponding
, which is below the recommended margin, but the MTDE is acceptable, i.e.,
. Based on the numerical simulations in this and previous works [
1,
2], we suggest a relatively broad interval for choosing the MP parameter
, i.e.,
.
Furthermore, we propose choosing the RTDE
to unsure stability, and choosing
as
for robustness and to make certain that
(p. 125 in [
14]) is reasonable.
3.2. Pure Integrating Process
Consider the limiting case of an integrating process, i.e.,
(no delay), or a time constant system with a large time constant such that
, i.e., we consider a process model,
. Using the definition for the RTDE tuning parameter,
, and the PI controller tuning Equations (
23) and (
24), we find the PI controller tuning
Notice that Equations (
26) and (
27) are tuning variants in which the MTDE
is the tuning parameter instead of the RTDE
.
Consider the limiting case of an integrating process, i.e.,
(no delay). From Equations (
26) and (
27), we find the PI controller tuning
Notice that in this case.
3.3. Using a () Pade Approximation
Consider the disturbance response with PI control,
Consider a (
) Pade approximation,
, i.e., with a second order numerator polynomial and a first order denominator polynomial, i.e., an approximation,
where
,
and
.
Using the same procedure as in Section 5.2 in [
1], and with unit relative damping, we find a third order polynomial for the closed loop response,
We prescribe a third order polynomial
When comparing Equations (32) and (33), we find that
By inserting Equations (
34) and (36) into Equation (35), it can be shown that
We solve the third order polynomial in Equation (
37) with respect to
, and find a real positive solution,
.
Furthermore, we find that the PI controller parameters
where
may be seen as a tuning parameter.
When assuming that the response time constant
, then we may express the PI controller parameters
and
with
where the product
is a nonlinear function of the tuning parameter
c. We find that it makes sense to choose
c in the interval,
.
From the PI controller setting in Equation (
38) with
, we find the MP parameter
.
For reducing the complexity of the problem, the (1, 2) Pade approximation was used; e.g., a (2, 2) Pade would result in a fourth order polynomial. Notice that a (1, 1) Pade approximation was used in the earlier work of [
1] in Section 5.2.
4. Optimal Performance Settings
Consider the following Pareto performance objective defined as
where
is the servo-regulator parameter originally introduced in [
2], and is chosen in the interval
for the weighting between output disturbance (servo) weighting
and input disturbance (regulator) weighting
. In Equation (
41), the function argument is
. In this work, we set
([
16]). Furthermore, we set
, which was argued in [
17] to be the equivalent of setting
, which was used in the original work of [
16] and also [
2]. The reference/weight values are calculated as following,
, and,
, for a prescribed robustness
. We set
which is the robustness value corresponding to a SIMC-tuned PI controller with
for a FOPTD process where
([
16]).
We consider the reference example where we are given an IPTD process with
. We find the same reference values as in [
18], viz.
where
and
, and
where
and
.
The following main performance objective is defined in a mean square error sense,
where
x is a tuning method and,
(default) and M =
length().
A couple of optimal suggestions for the choice of the MP parameter are worked out in the following. The first MP parameter setting may be found by solving the following optimization problem,
where Alg. 1 (
) and Alg. 1
o (
) is pre-calculated as follows
Interestingly, the MP parameter setting in Equation (
43) is approximately equal to the setting which is deduced in
Section 3.3. Additional MP parameter settings are given in
Table 1 based on solving Equation (
43) for different servo-regulator parameters
in the Pareto performance objective
J (Equation (
41)).
The second MP parameter is found by
where Alg. 1 (
) and PO (
) are pre-calculated as follows
Notice that
is equal to the recommended MP parameter in [
2]. However, the MP parameter in this paper results from an optimization problem, while the one proposed in [
2] originated from an ad hoc approach.
Figure 3 illustrates the two MP parameters described above. In terms of the main performance objective
(Equation (
42)),
Table 2 shows that
is
times better than SIMC (arguably
), and
times better than
.
Based on numerical simulations, we present the recommended settings for choosing the MP parameter
as proposed in
Table 3.
Consider PI controller settings for an IPTD system,
, with varying gain velocity,
k, and time delay
.
Table 4 and
Table 5 illustrate the
, i.e., the minimum of
,
,
,
and
,
,
,
,
, respectively, as a function of
.
Consider PI controller settings for an IPTD system,
, where
and time delay
.
Figure 4 shows the indices
,
,
,
,
,
,
,
and
as a function of varying the MP parameter
and with prescribed RTDE
.
5. Simulation Examples
In the following simulations (if possible), we compare Algorithm 1, with the recommended MP parameter settings, vs. the SIMC tuning rule [
12].
We continue with studying the reference example considered in
Section 4. See also [
1] for additional details on this example.
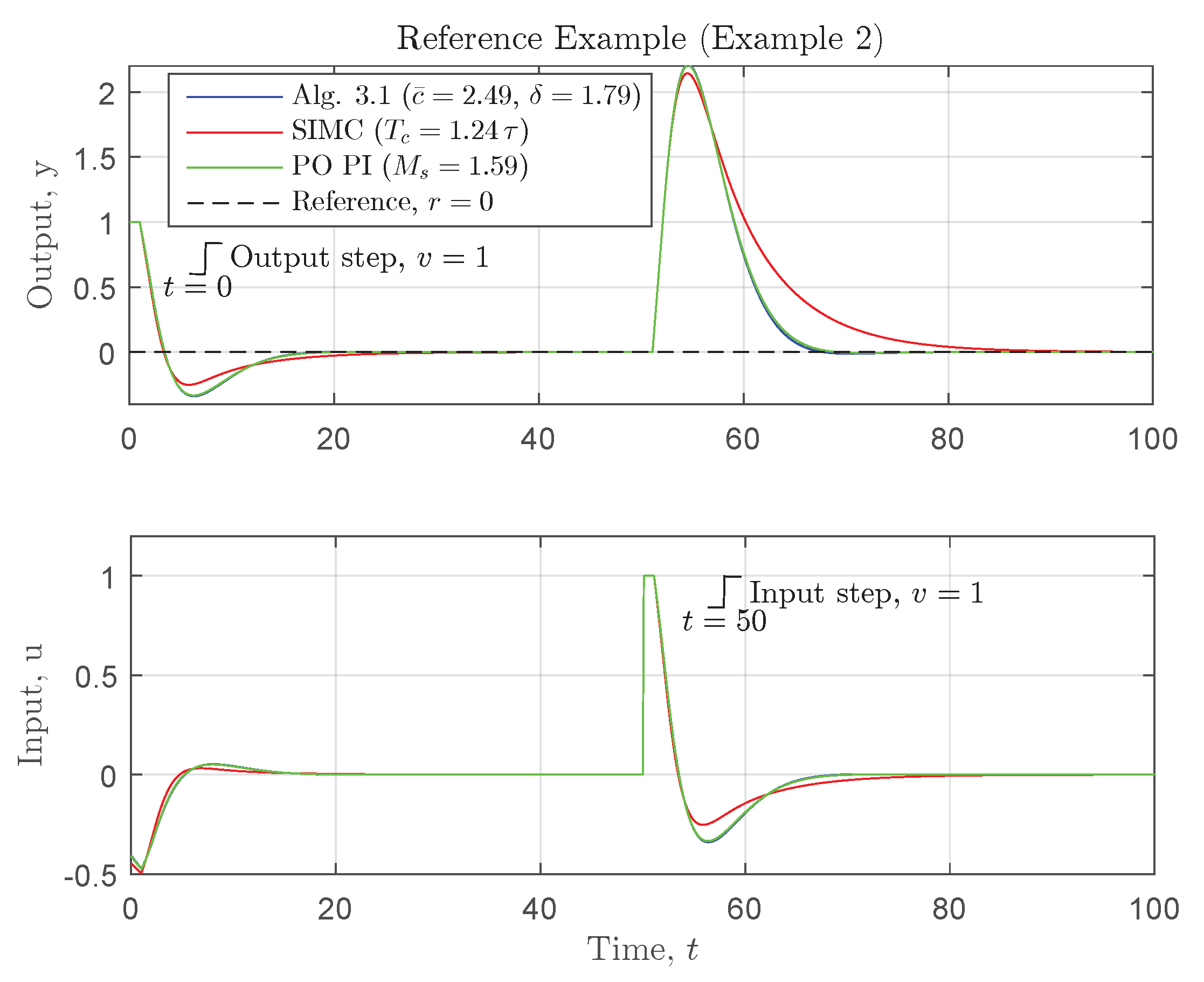
Example 2 (Reference Example).
The same IPTD example as in [1] is used, i.e., a process model, , with gain velocity and time delay is considered. The time-domain responses given a prescribed robustness, , are illustrated in Figure 5. The corresponding PI controller parameters, indices and margins are given in Table 6. The margins for the controllers are all acceptable, i.e., and as in [14]. Example 3 (Lag-dominant system).
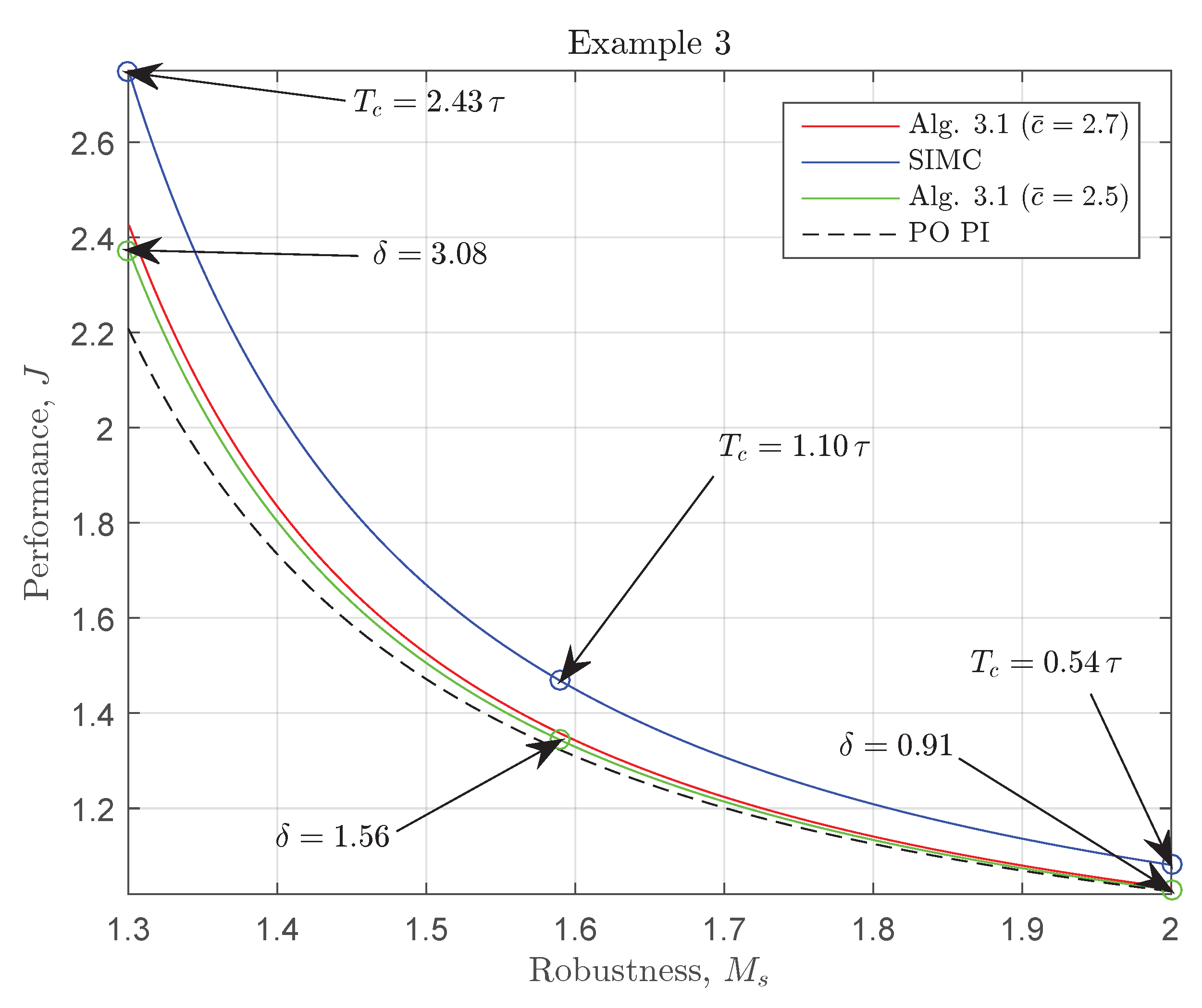
An air-heater was studied in [19] and it was found that a FOPTD model with process gain , time delay and time constant , gives a sufficient model approximation. We approximate the FOPTD model as an IPTD process where the gain velocity (slope) and time delay, . The Pareto performance objective J vs. trade-off curves are shown in Figure 6. In terms of the main performance objective it can be seen in Table 7 that is times better than and times better than SIMC. The time-domain responses, given a prescribed robustness, , are illustrated in Figure 7. The corresponding PI controller parameters, indices and margins are given in Table 8. The margins for the controllers are all acceptable, i.e., and as in [14]. Notice, that the prescribed MTDE, is almost equal the exact . Some results regarding a couple of motivated higher order processes are presented in the following examples. Notice that SIMC offers the half-rule model reduction technique. However, for our case, we approximate the higher order systems by identifying two parameters, the unit reaction rate
and the lag
L from a step response, i.e., the Process–Reaction Curve (PRC) as presented in the work of ZN [
9,
10,
11]. We denote the variant as follows: PRC + Algorithm 1.
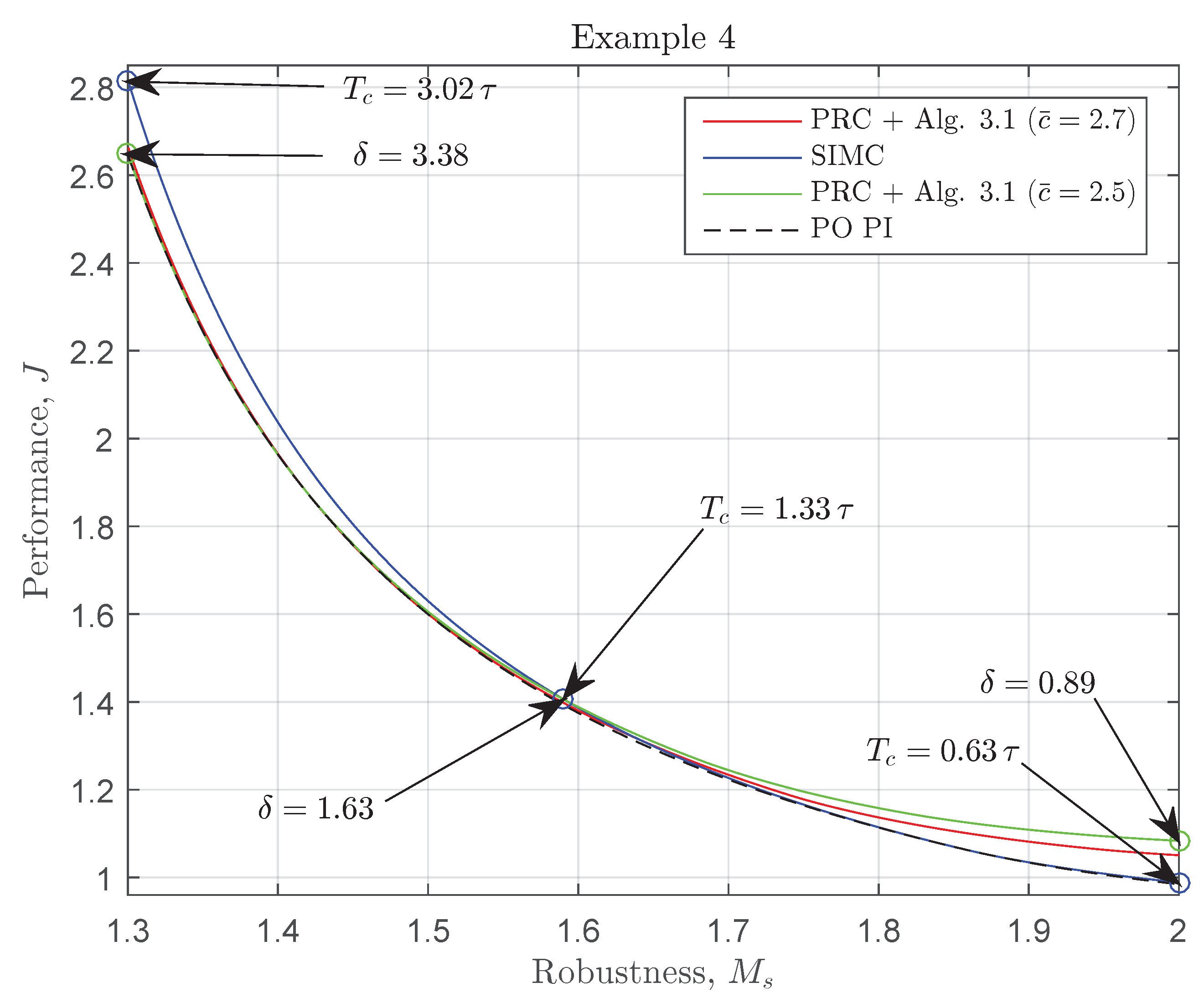
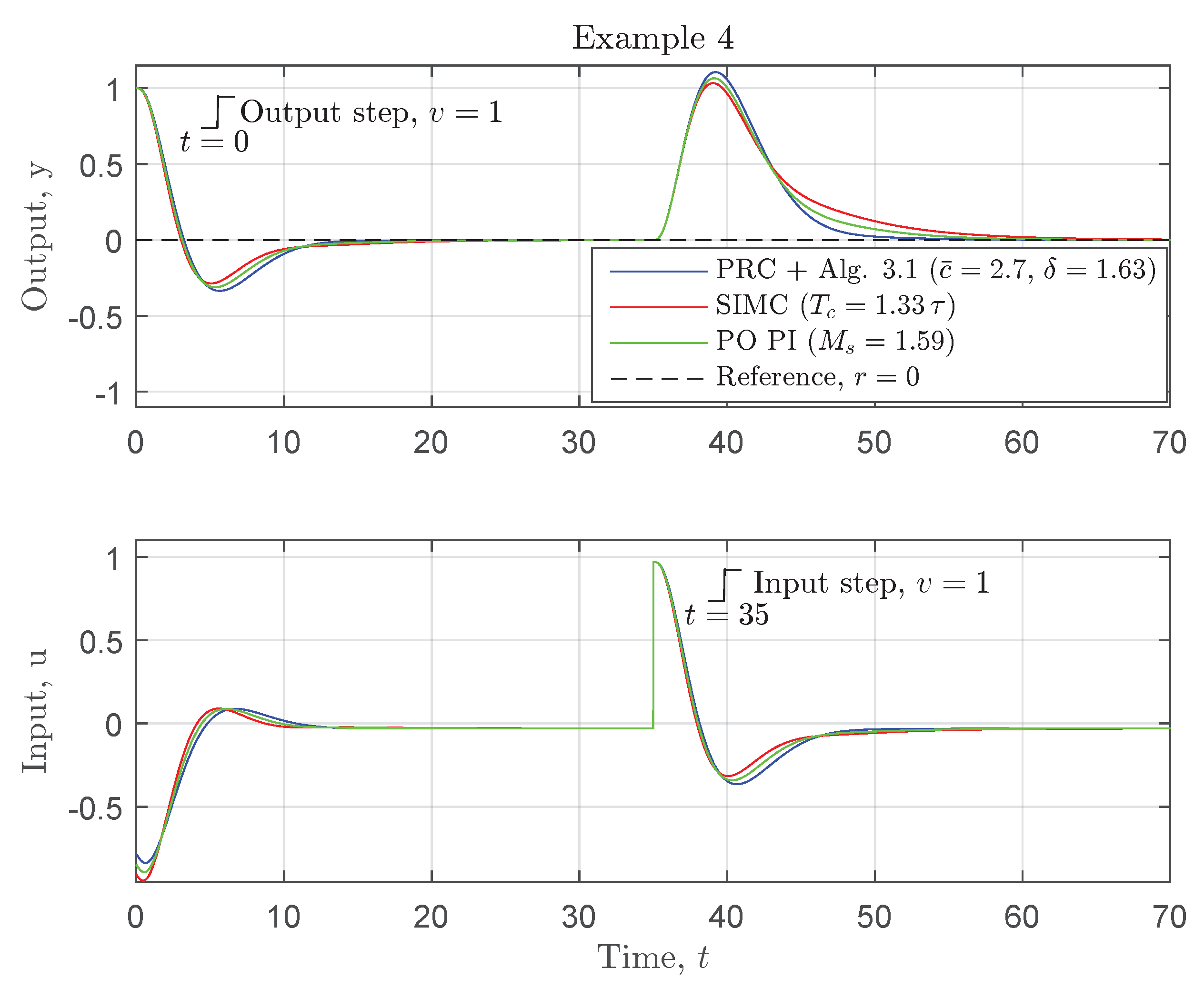
Example 4 (Higher order process).
A distillation column studied in [20] (p. 591) is partly described by the following process model, By identifying the lag L and the maximum slope (unit reaction rate) from the PRC method we may approximate the process model as an IPTD model with gain velocity and time delay .
Using the half-rule technique in SIMC, we approximate a FOPTD model where the gain , time constant , and time delay .
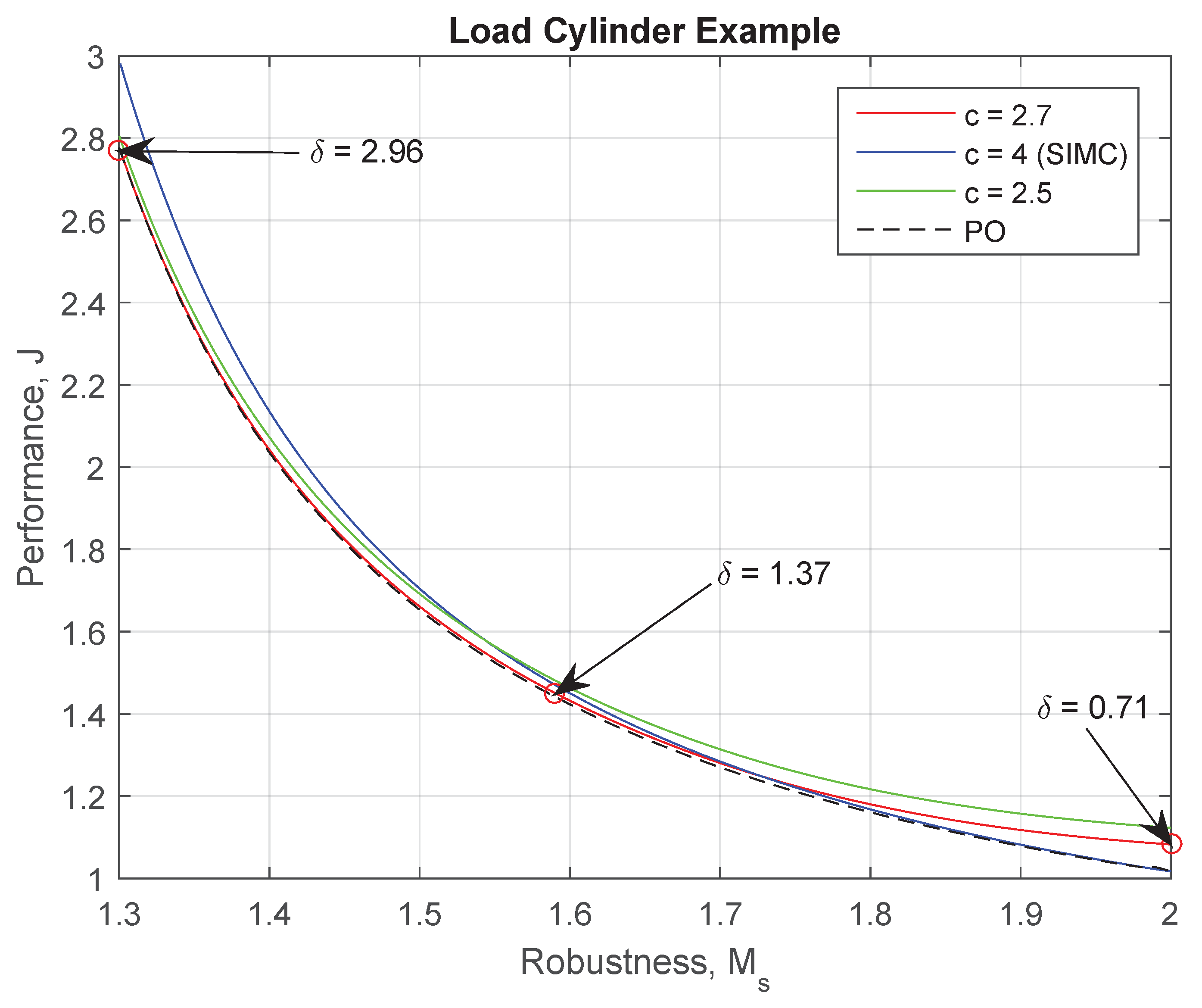
The Pareto Performance objective J vs. robustness trade-off curves are illustrated in Figure 8. Notice, that is the closest to optimal on the most robust part of the -interval. SIMC is crossing around and is the closest to optimal on the less robust part. In terms of the main performance objective , we show in Table 9 that is times better than , and times better than SIMC. The time-domain responses, for a prescribed robustness , are illustrated in Figure 9. The corresponding PI controller parameters, indices and margins are given in Table 10. The margins for the controllers are all acceptable, i.e., and , as in [14]. Notice, that the prescribed MTDE, is almost equal to the exact . Note that the half-rule technique in SIMC is not compatible with process models containing complex poles/underdamped dynamics, hence, in such cases, we consider arguably the same algorithm as SIMC, i.e., Algorithm 1, where the MP parameter, . An example of this is given in the following.
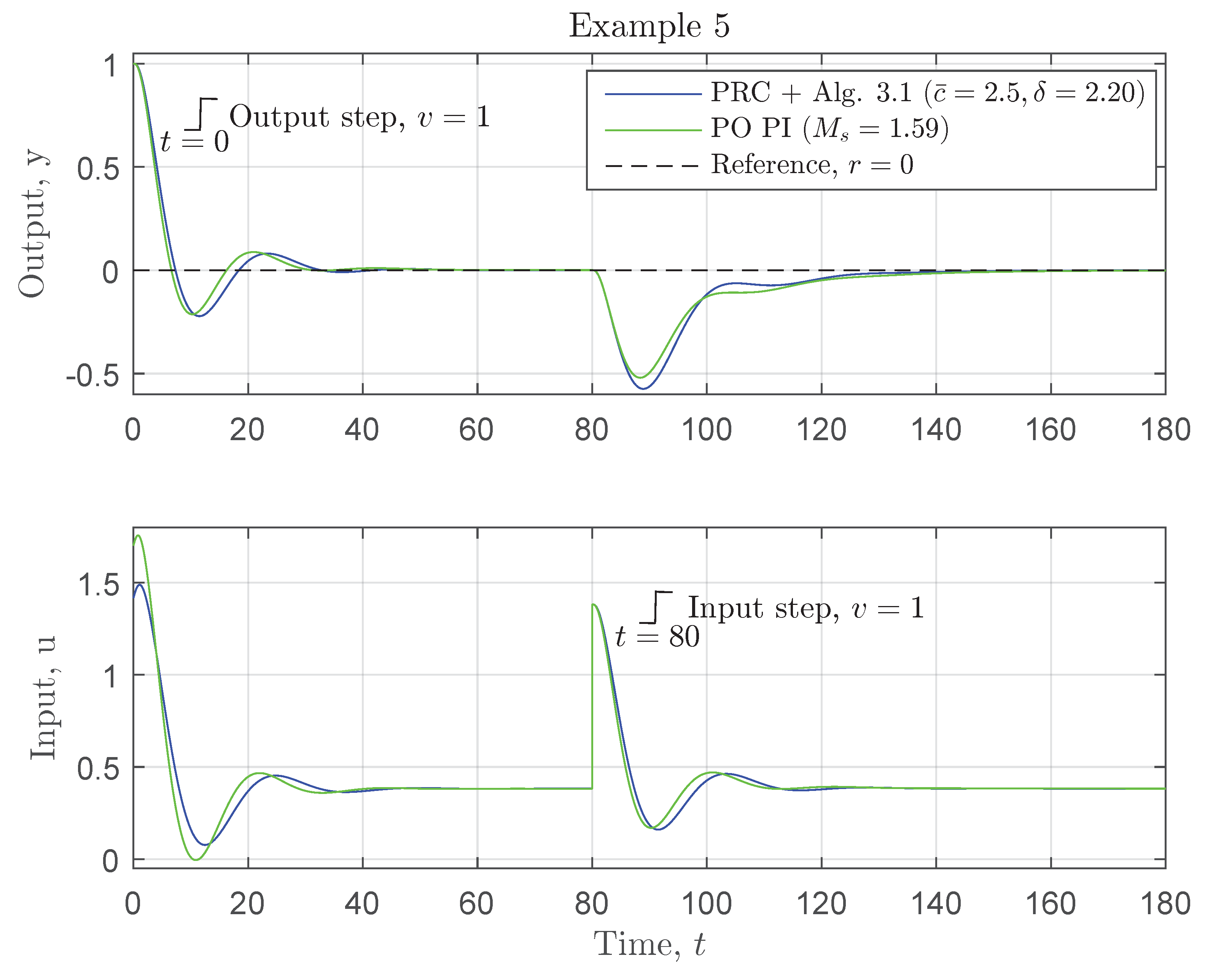
Example 5 (Underdamped system).
An unmanned submersible vehicle studied in [21] is described partly byi.e., from commanded elevator deflection u to the pitch angle of the vehicle y. We approximate Equation (48) by an IPTD model with gain velocity and time delay . The Pareto performance objective J vs. trade-off curves are illustrated in Figure 10. In terms of the main performance objective , we show in Table 11 that is times better than and times better than . Notice that is closest to optimal on the most robust part of the -interval. Furthermore, is seen crossing both and around and is closest to optimal on the less robust part. The time-domain responses, given a prescribed robustness , are illustrated in Figure 11. The corresponding PI controller parameters, indices and margins are given in Table 12. The margins for the controllers are all acceptable, i.e., and as in [14]. Last, we propose a tuning variant based on the PRC and Algorithm 1, as above. However, now, the gain velocity in the IPTD model is, instead, varying proportionally, i.e., , where is considered as a tuning parameter. TO simplify the tuning, we propose to set the RTDE equal constant (i.e., an ad hoc suggestion). This means that the only tuning parameter is . We denote this variant as follows: -PRC + Algorithm 1.
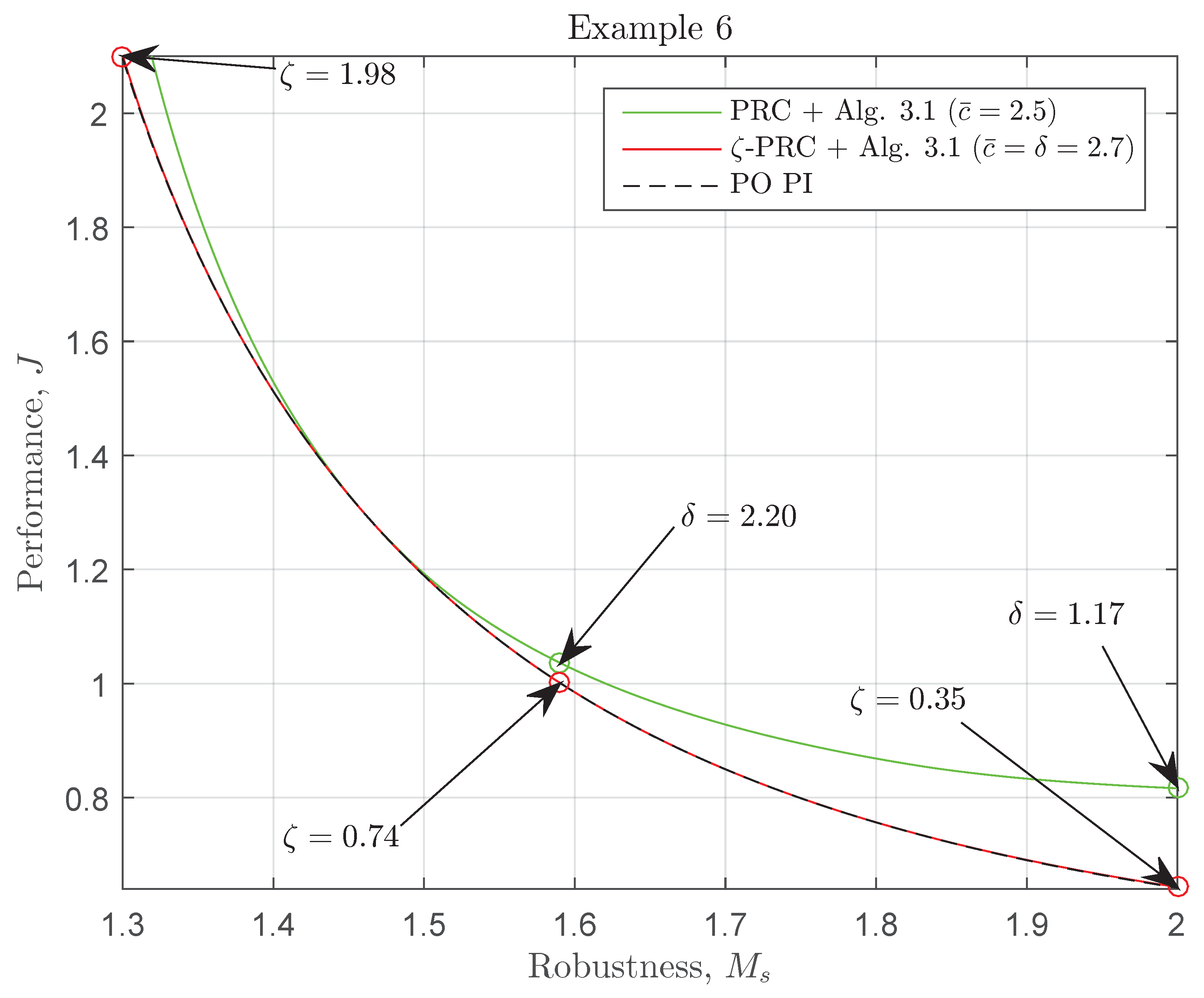
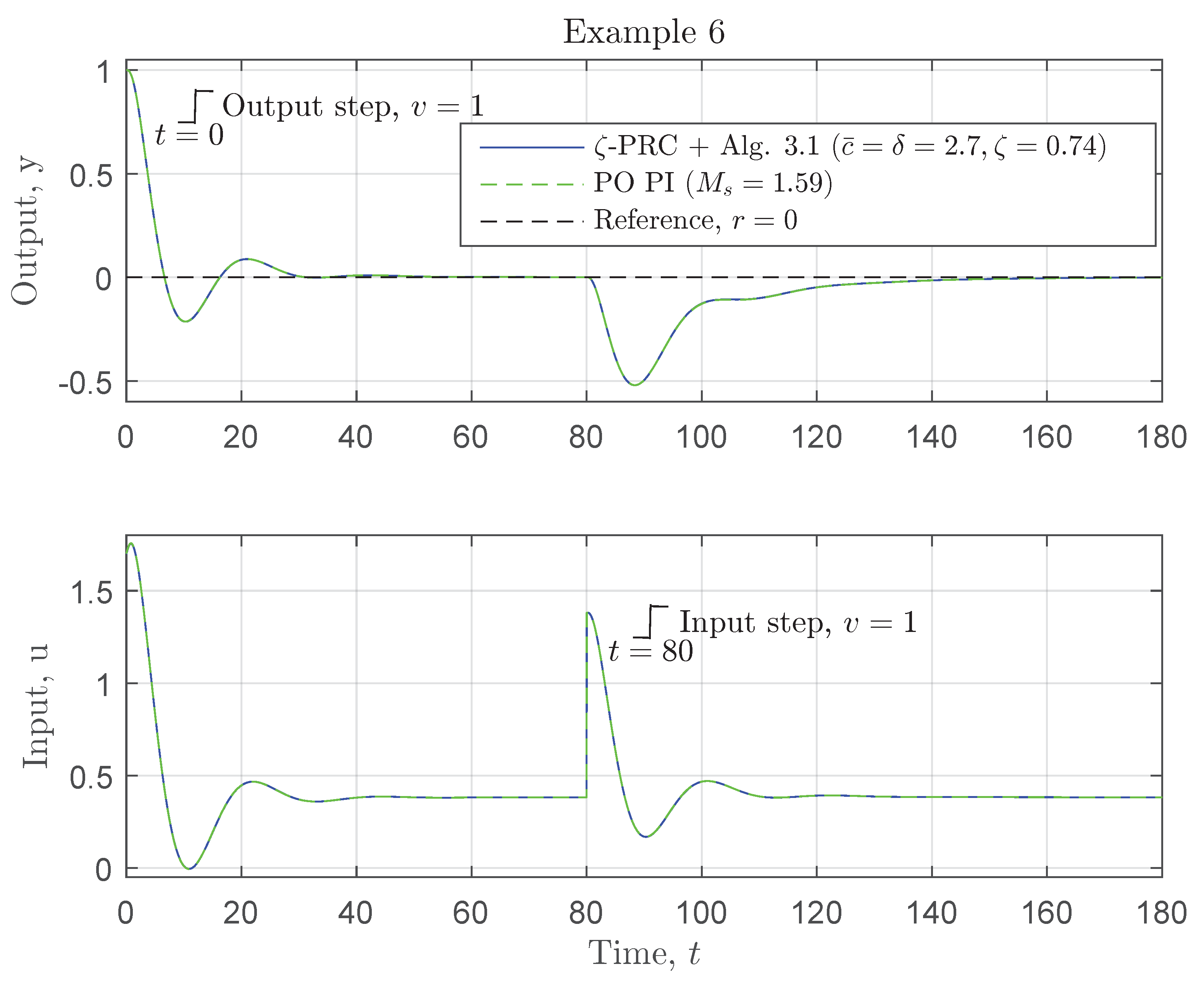
Example 6 ζ-PRC variant).
Consider the same process model as studied in Example 5. The model is approximated by an IPTD model, where the gain velocity is varied, , and time delay, . In this example, we set the RTDE .
It can be seen in Figure 12 that the PO PI curve and the ζ-PRC curve are indistinguishable. This is quite a surprising result. In terms of the main performance objective , we show in Table 13 that ζ-PRC is times better than variant. The time-domain responses, for a prescribed robustness , are illustrated in Figure 13. As a consequence of the above, these responses are also indistinguishable. The corresponding PI controller parameters, indices and margins are given in Table 14. 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}