Impact of Locality on Location Aware Unit Disk Graphs


Abstract
:1. Introduction
1.1. Related Work
1.2. Results of this paper
1.3. Organization of the paper
1.4. Preliminaries
2. Dominating Set
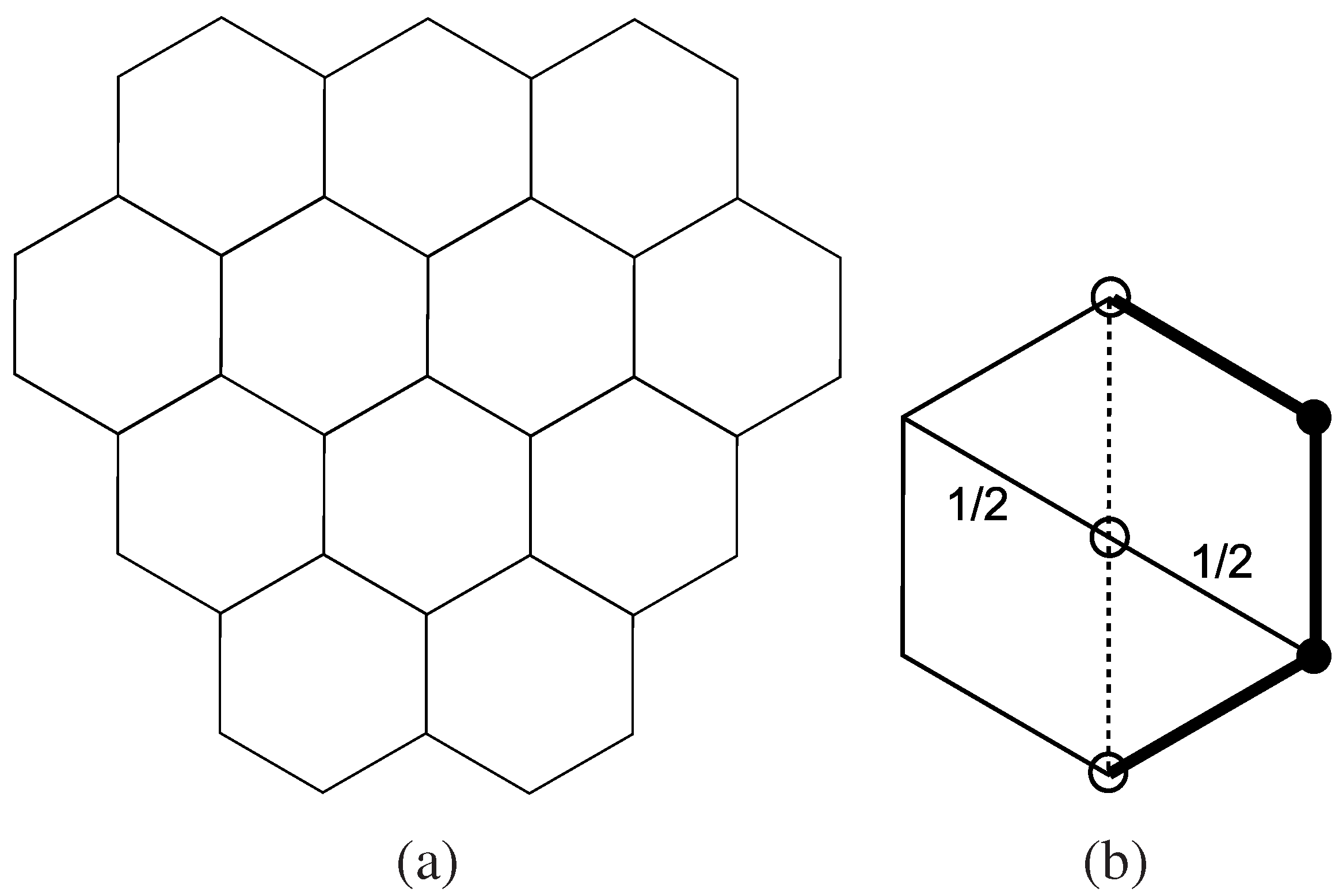
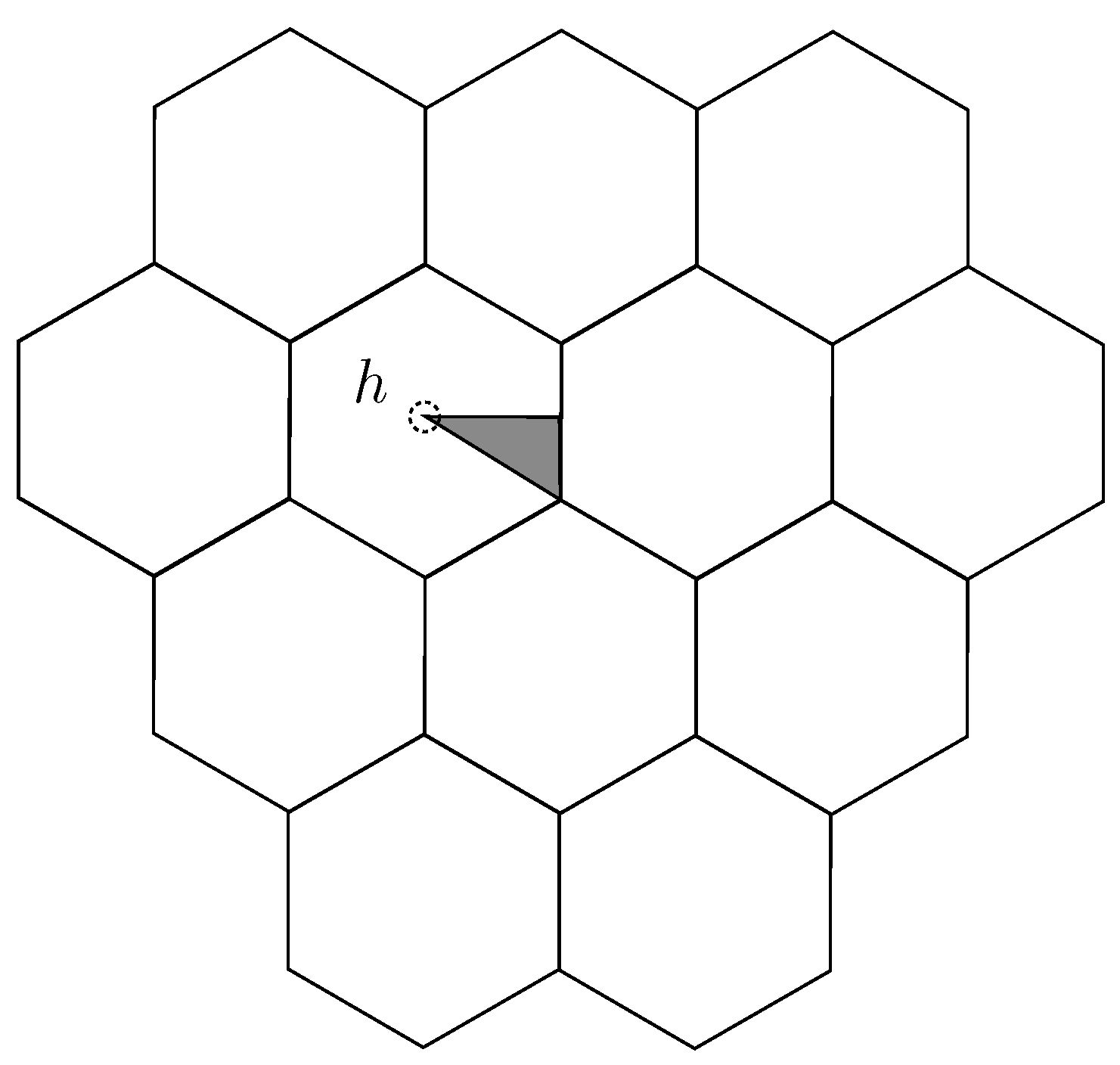
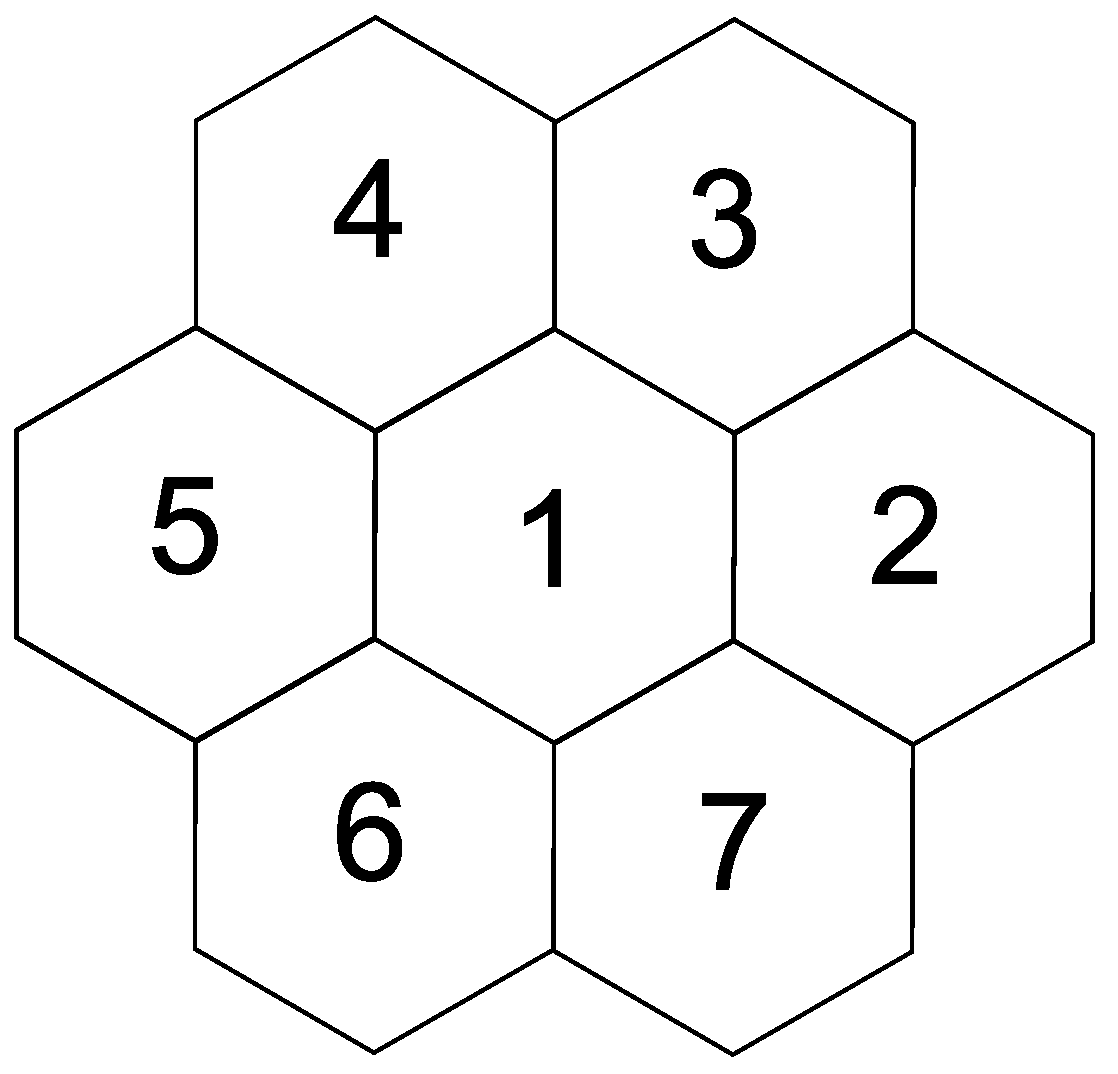
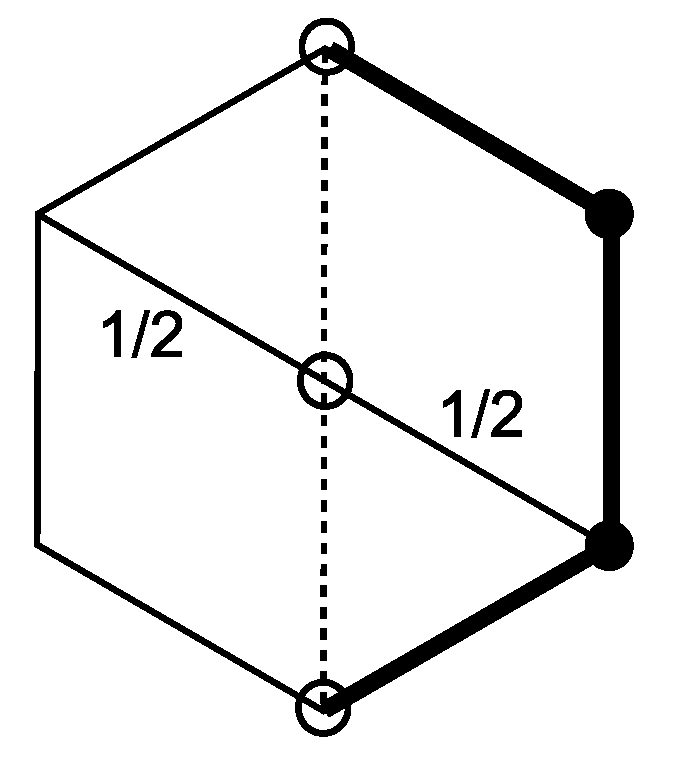
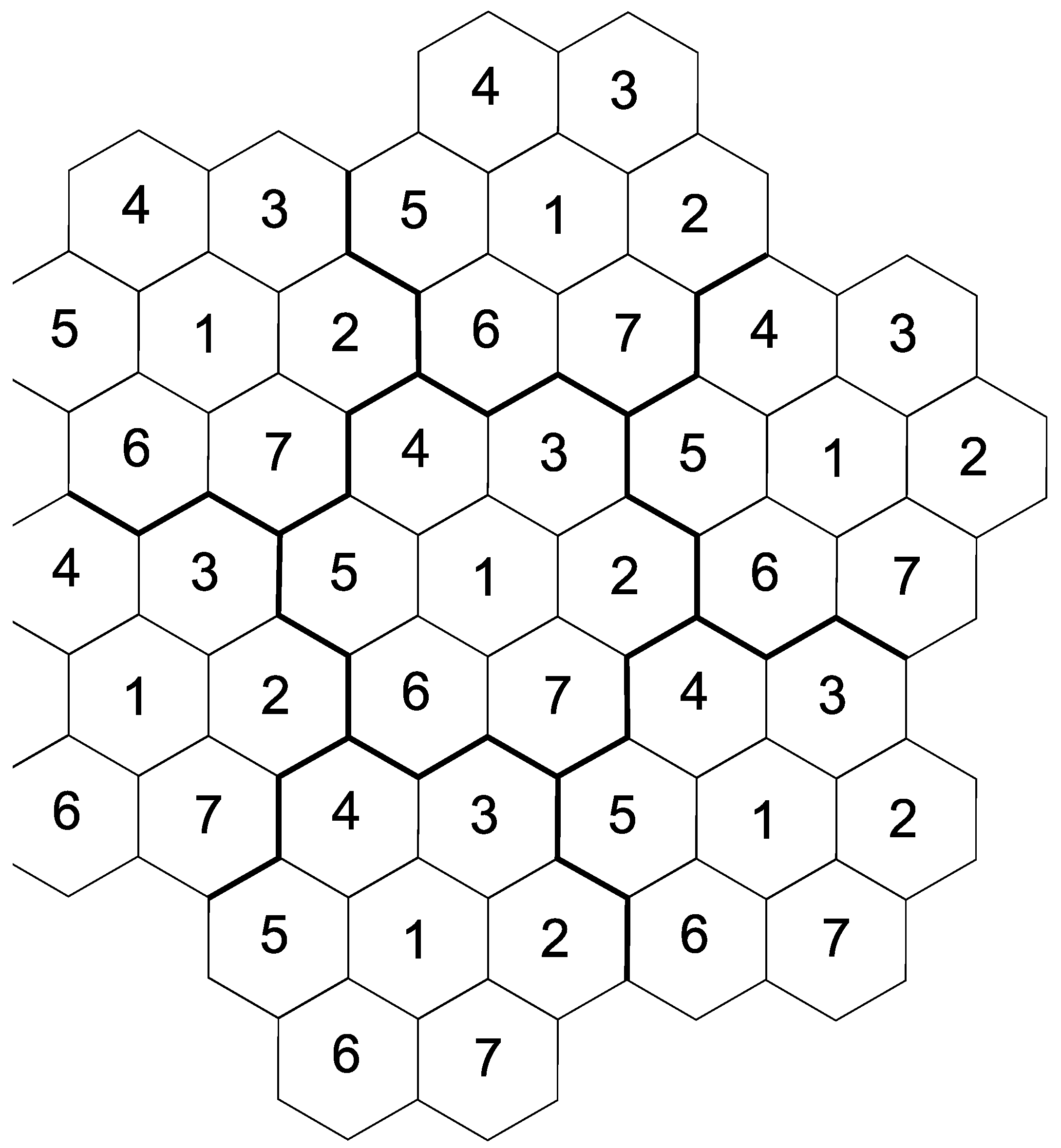
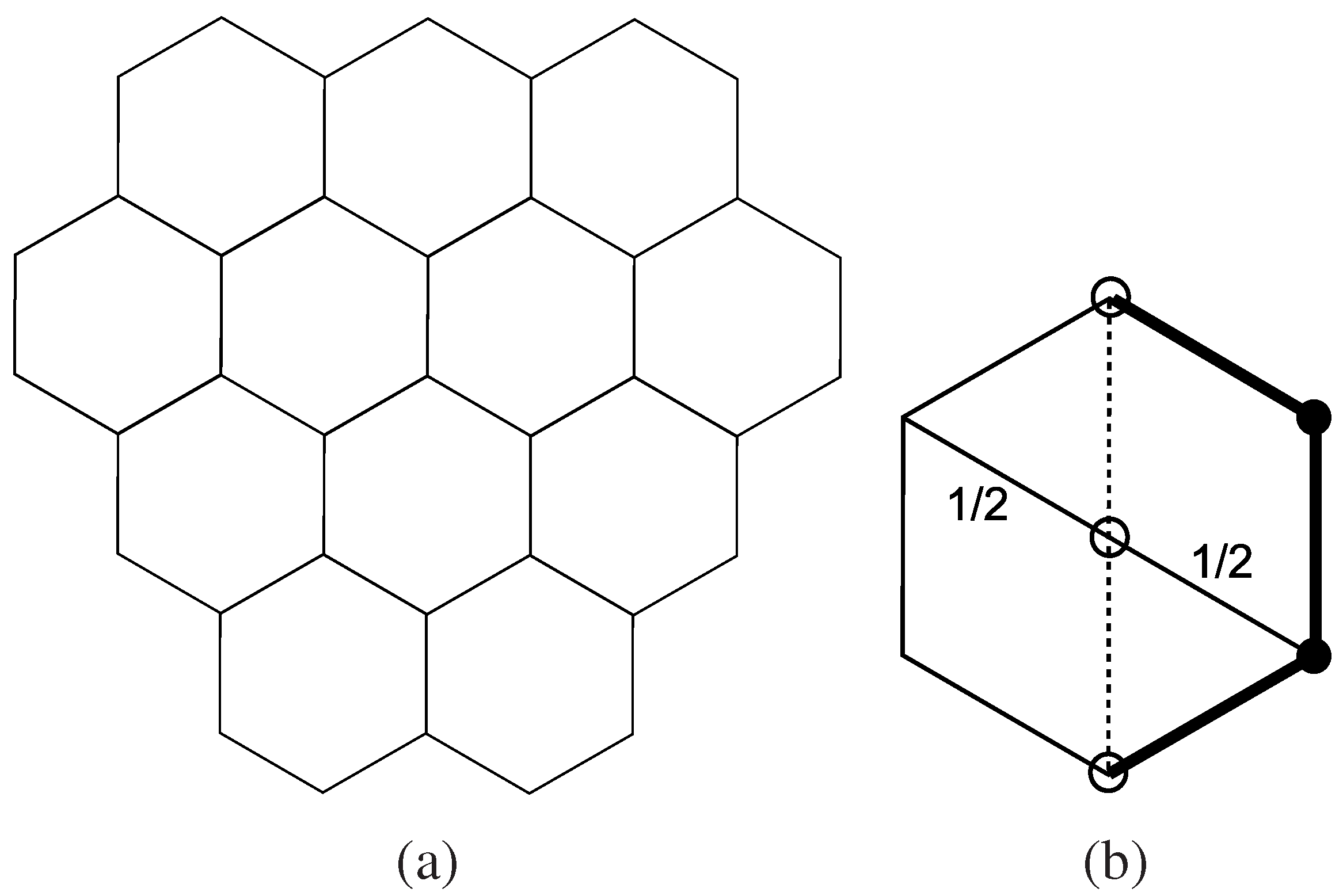
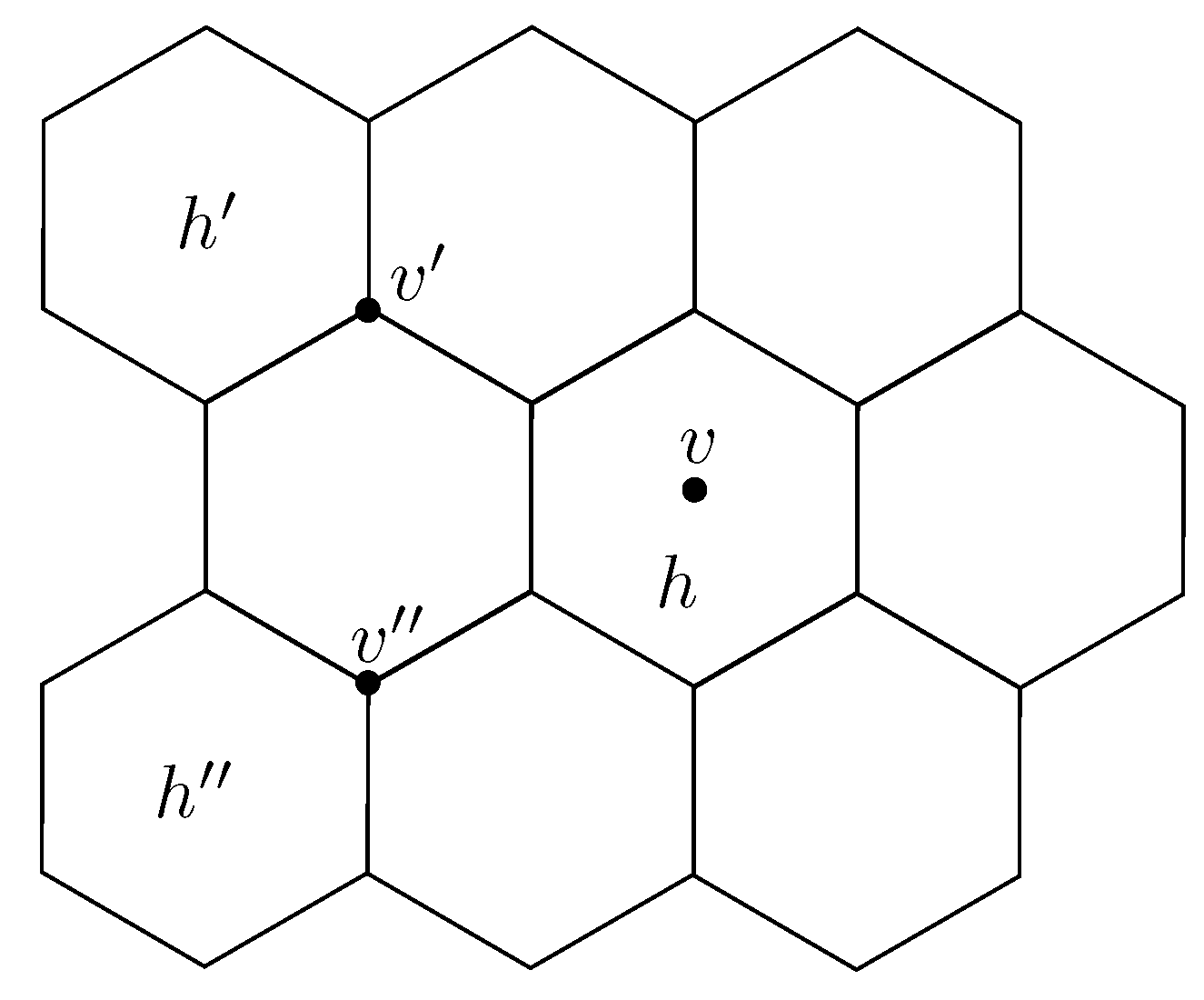
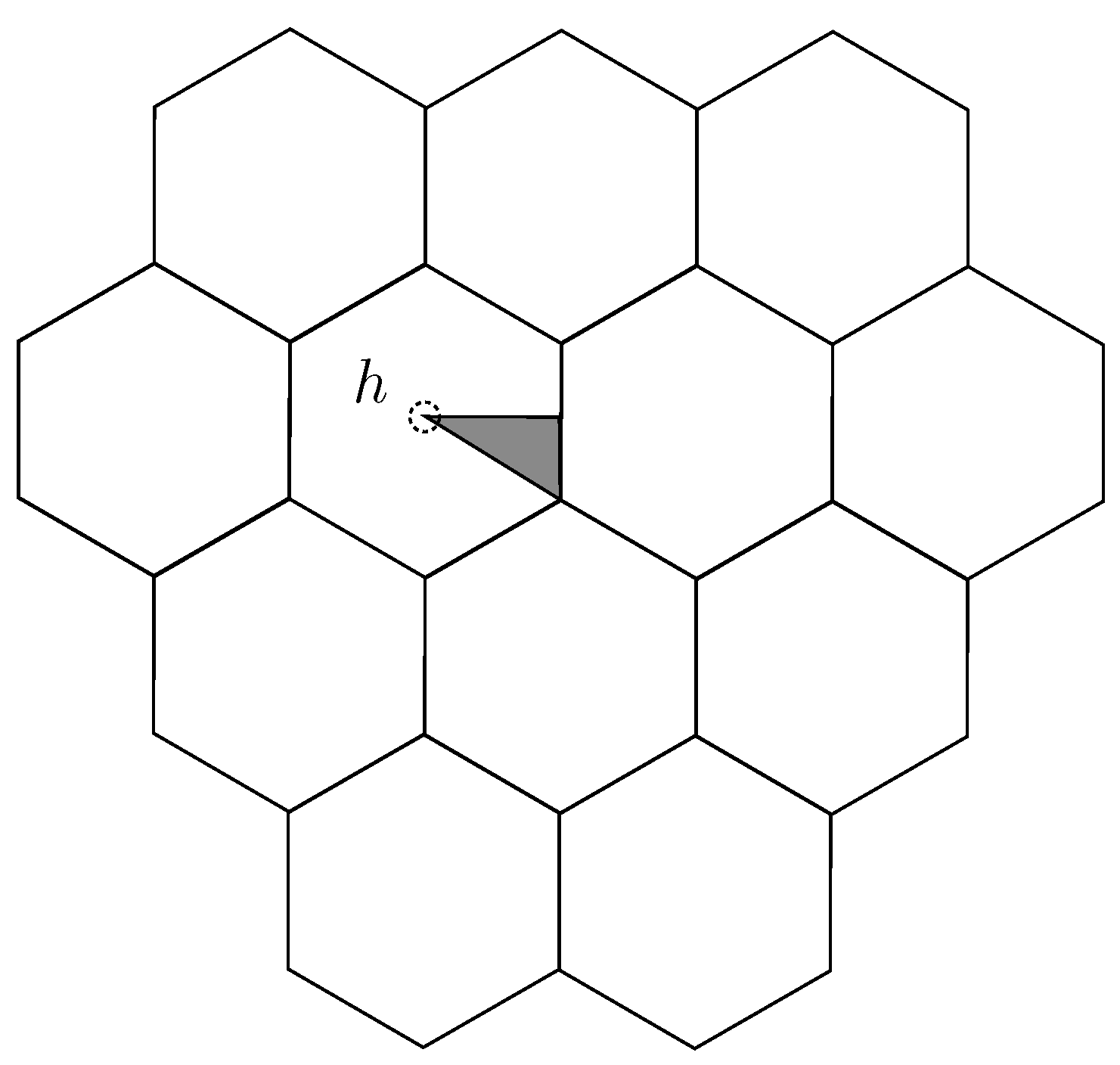
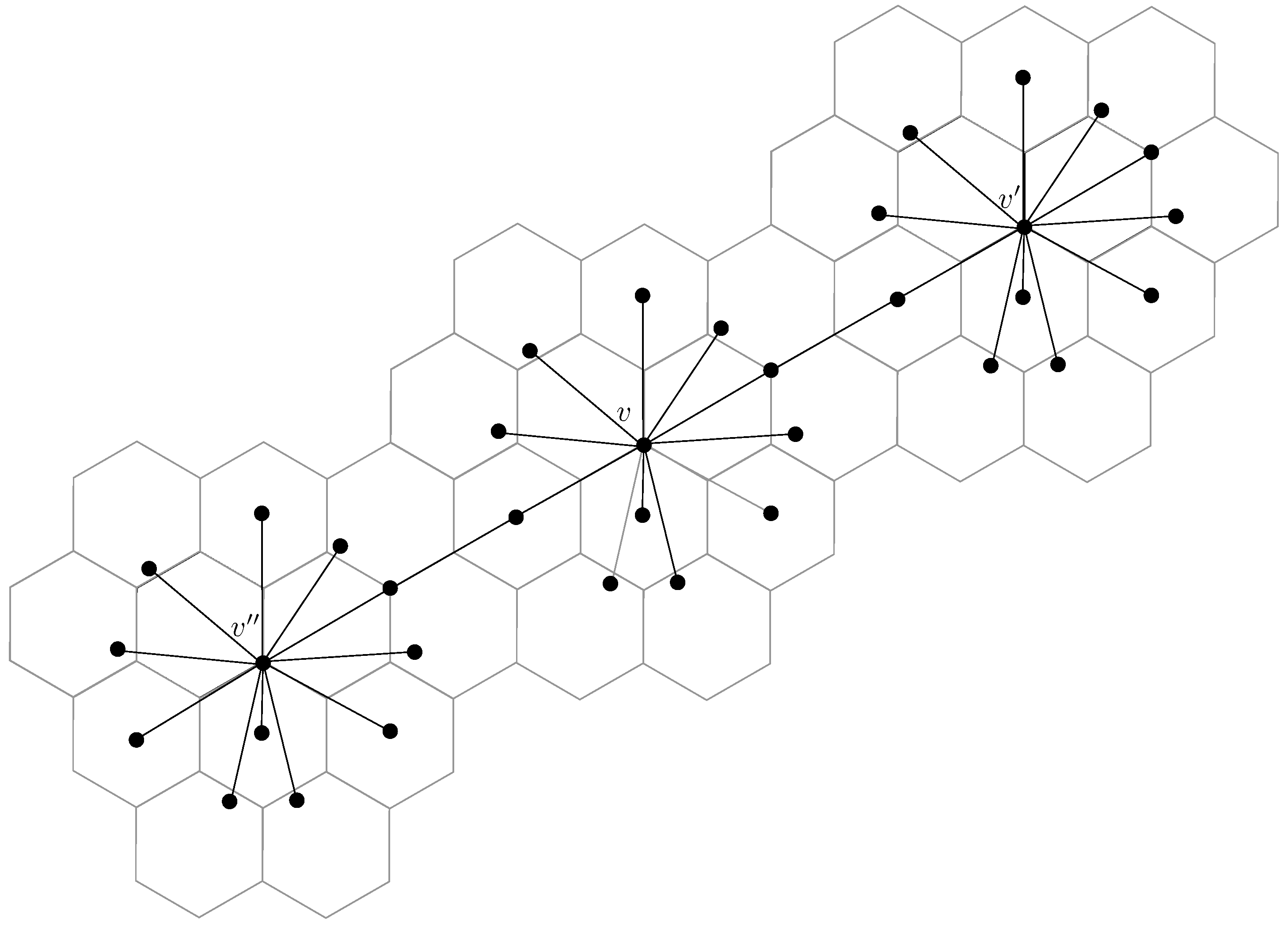
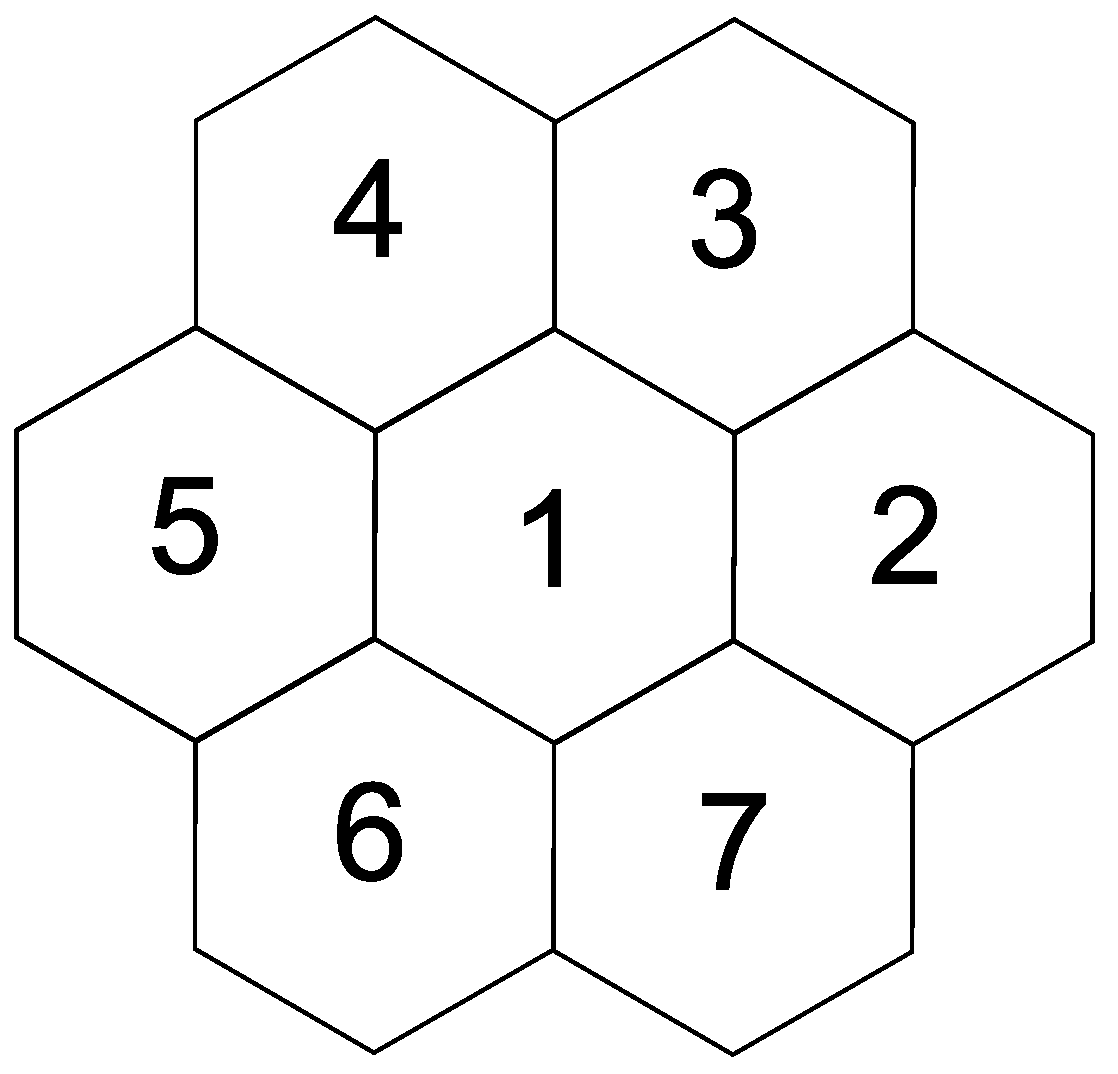
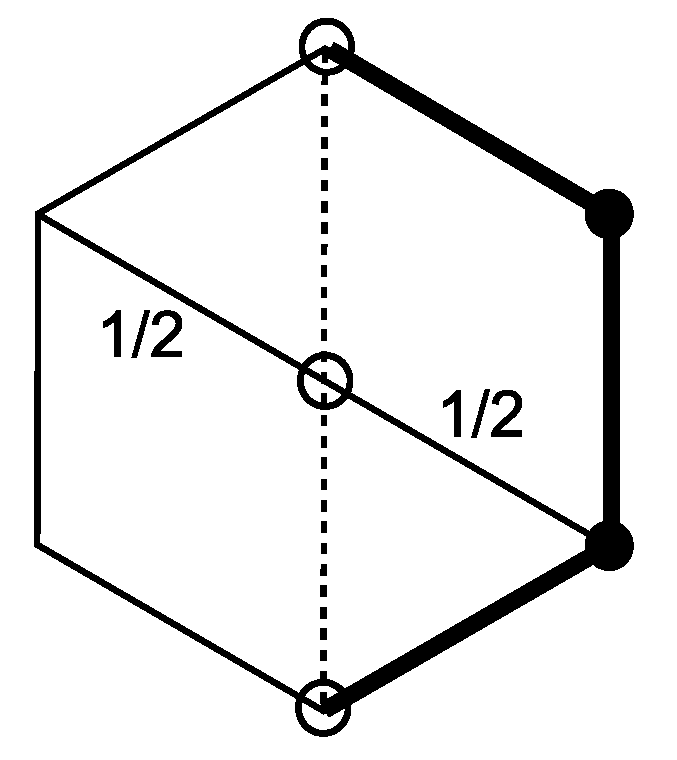
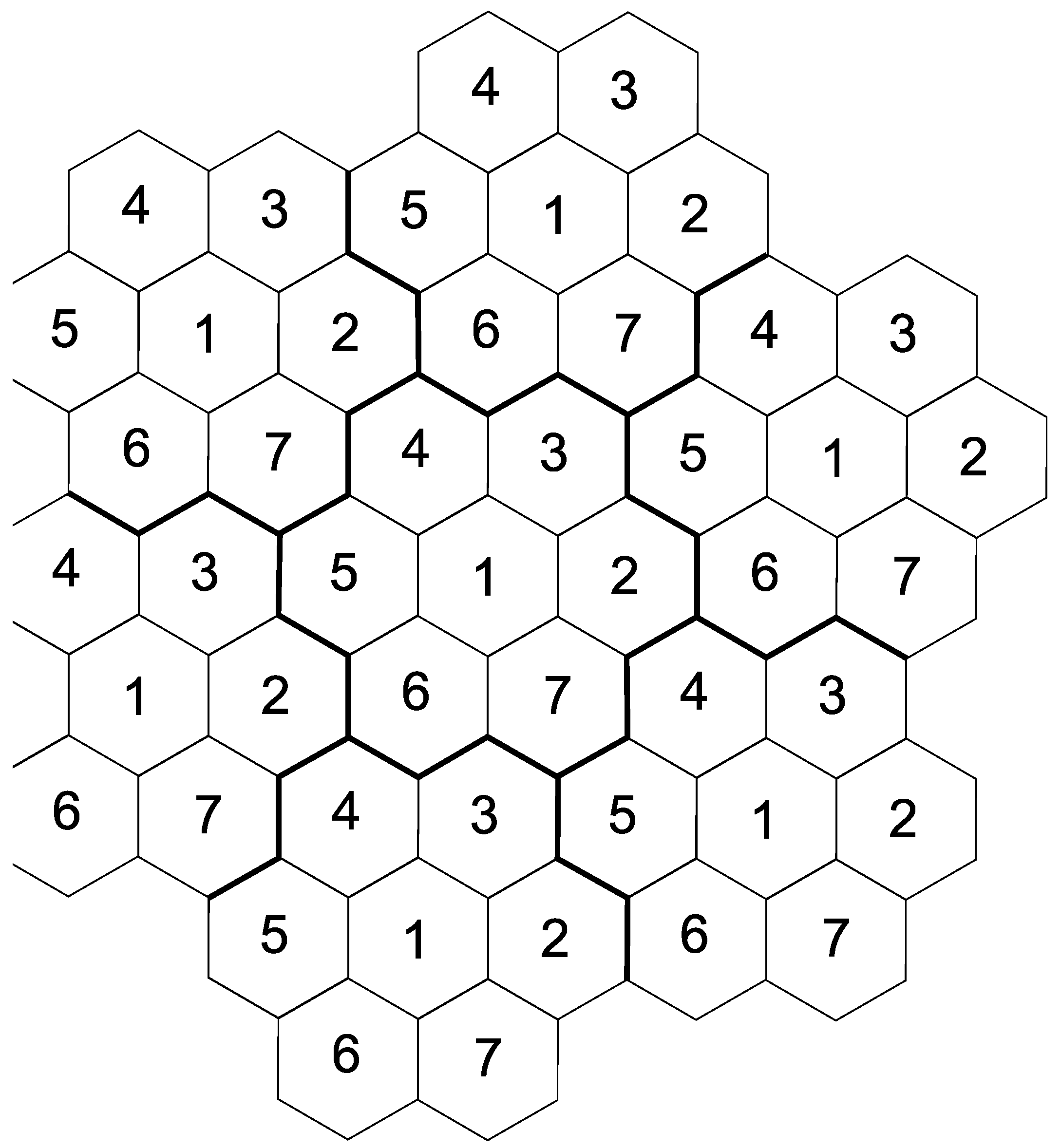
2.1. Tiling of the Plane
- Each vertex is contained in exactly one hexagon.
- All vertices in a hexagon are connected by an edge.
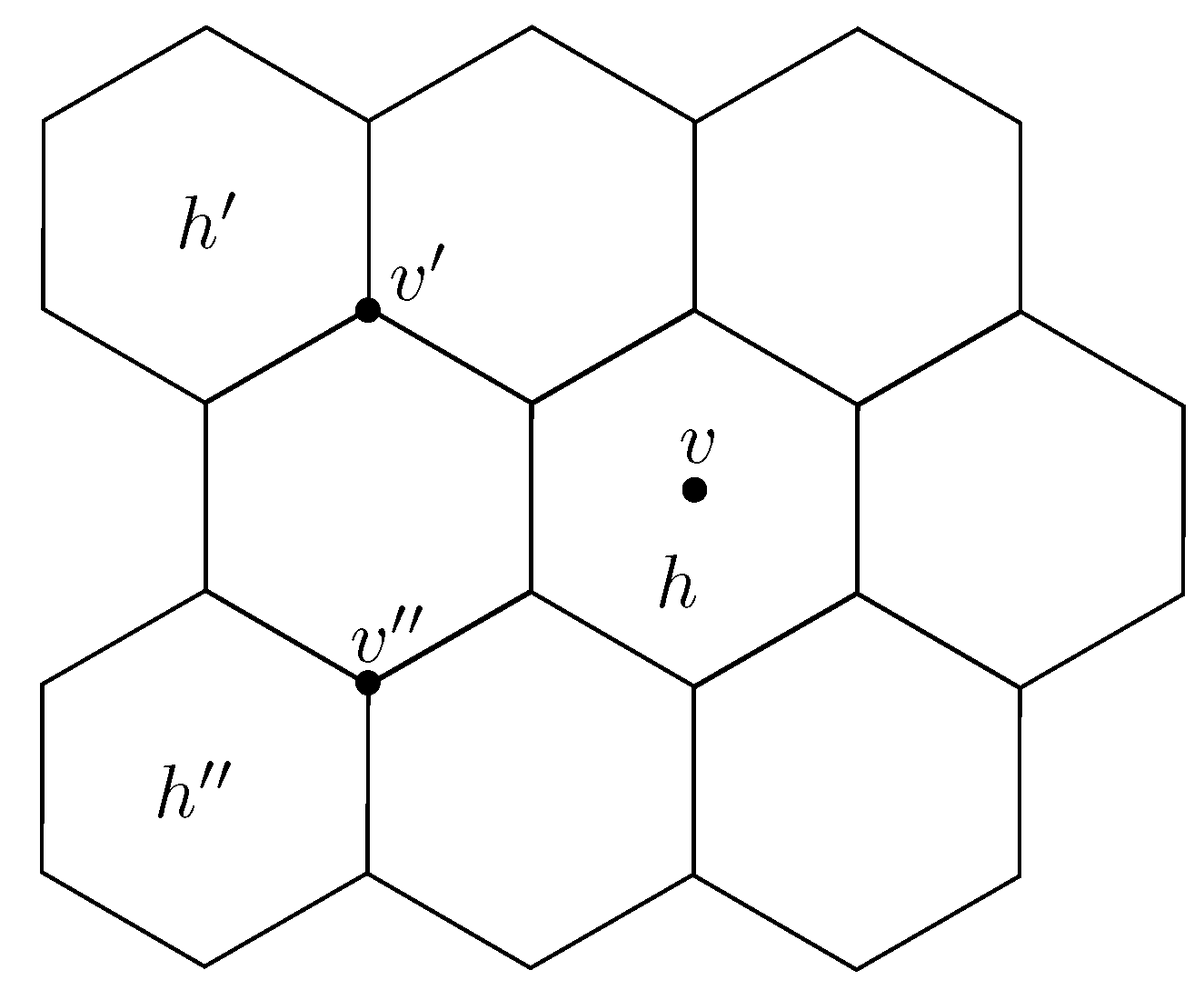
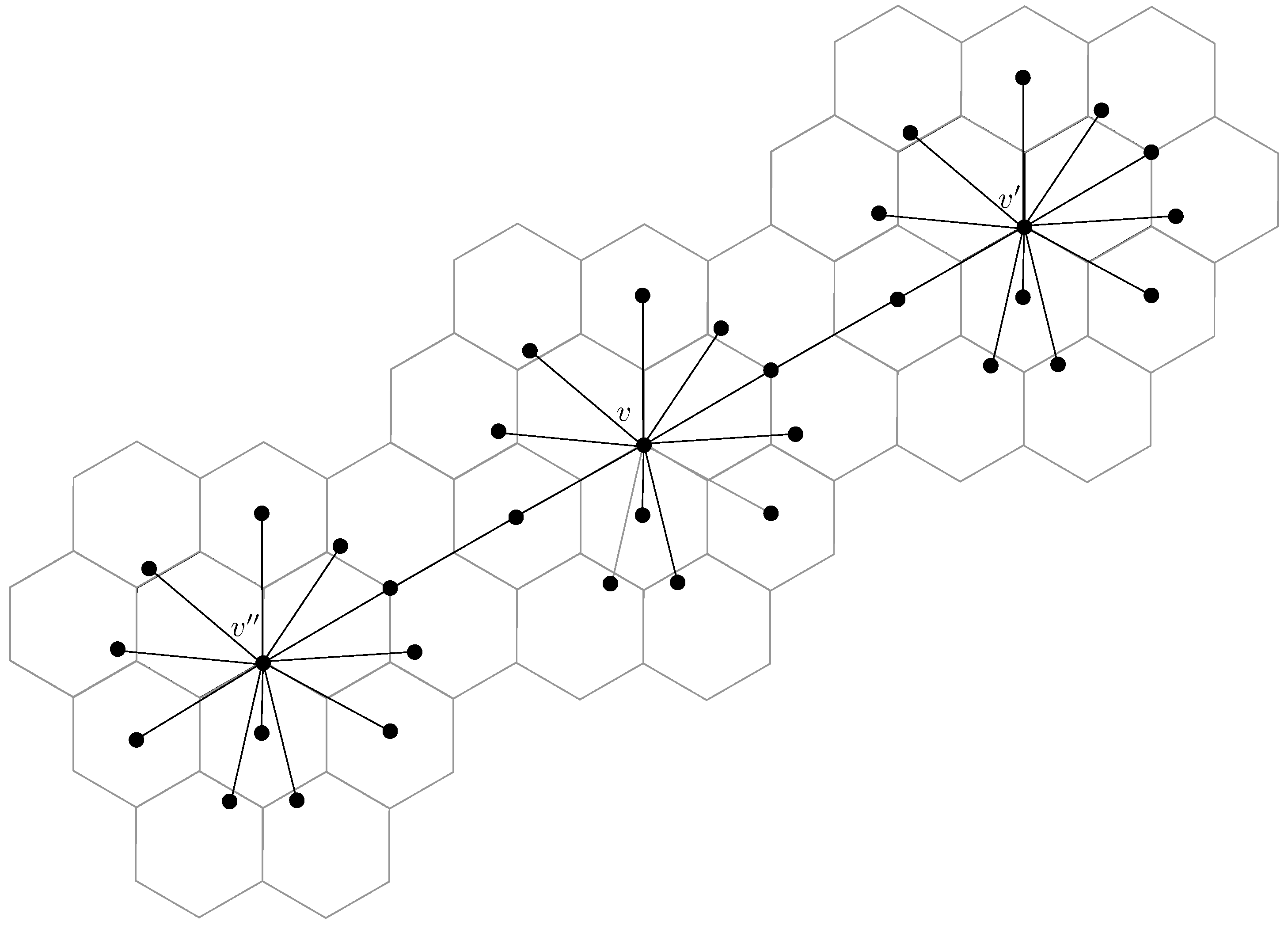
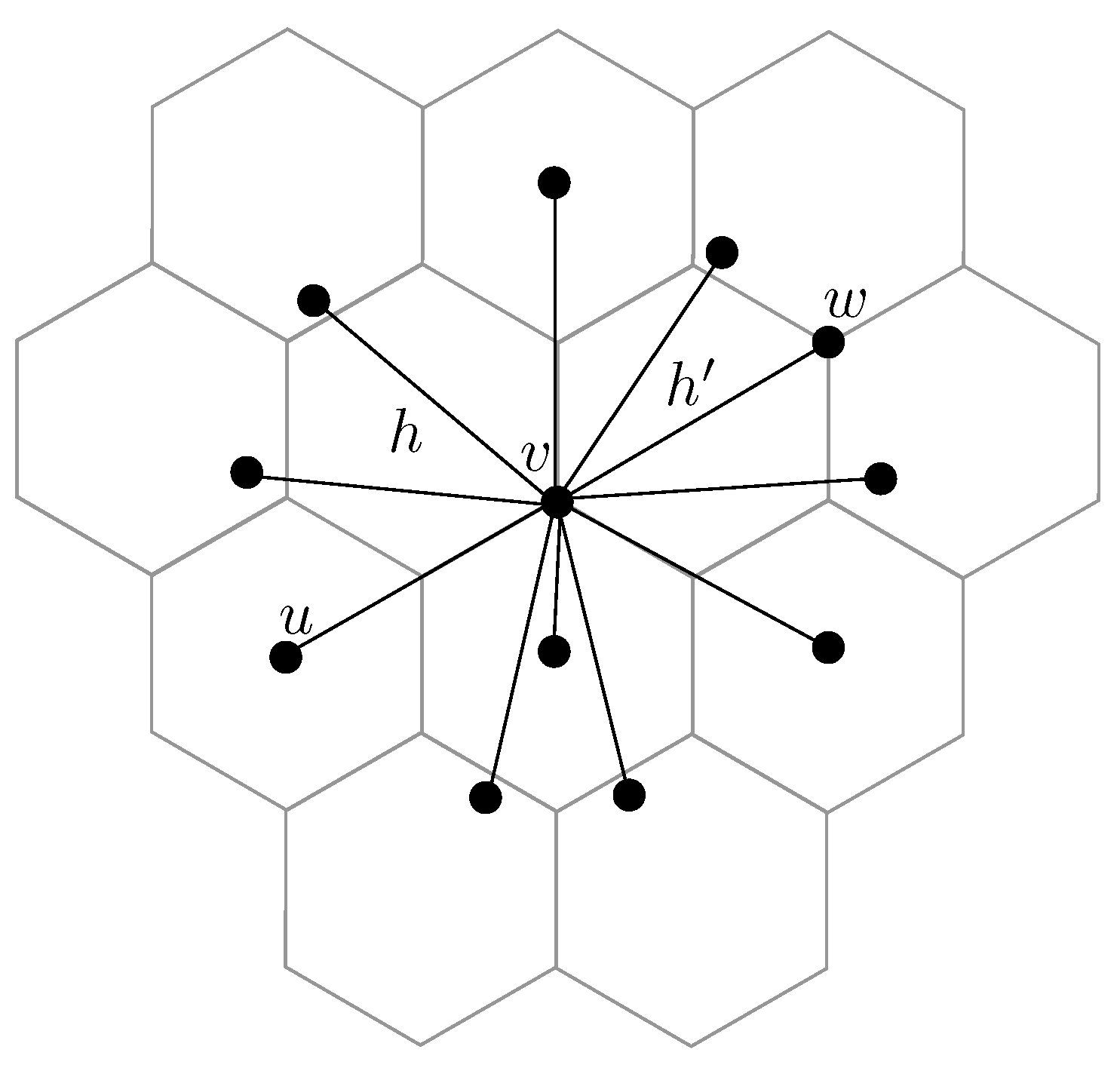
2.2. Algorithm for Unit Disk Graphs
- 1.
- The computed set D is a dominating set for G.
- 2.
- Let DOPT be an optimal dominating set. It holds that |D| ≤ 12 · |DOPT|.
- 3.
- Whether or not a vertex v is in D depends only on the vertices at most one hop away from v, i.e. Algorithm 1 is local.
- 4.
- The processing time for a vertex v is linear in the number of vertices adjacent to v.
| Algorithm 1: Local algorithm for finding a dominating set in a unit disk graph |
| 1 // Algorithm is executed independently by each node v; |
| 2 // Denote by Vh all vertices in h; |
| 3 Find all vertices in N(v) and compute Vh; |
| 4 if v is the vertex closest to the center of h among all v′ ∈ Vh then become part of D else Do not become part of D |
2.3. Tightness of Approximation Factor
2.4. Lower Bound

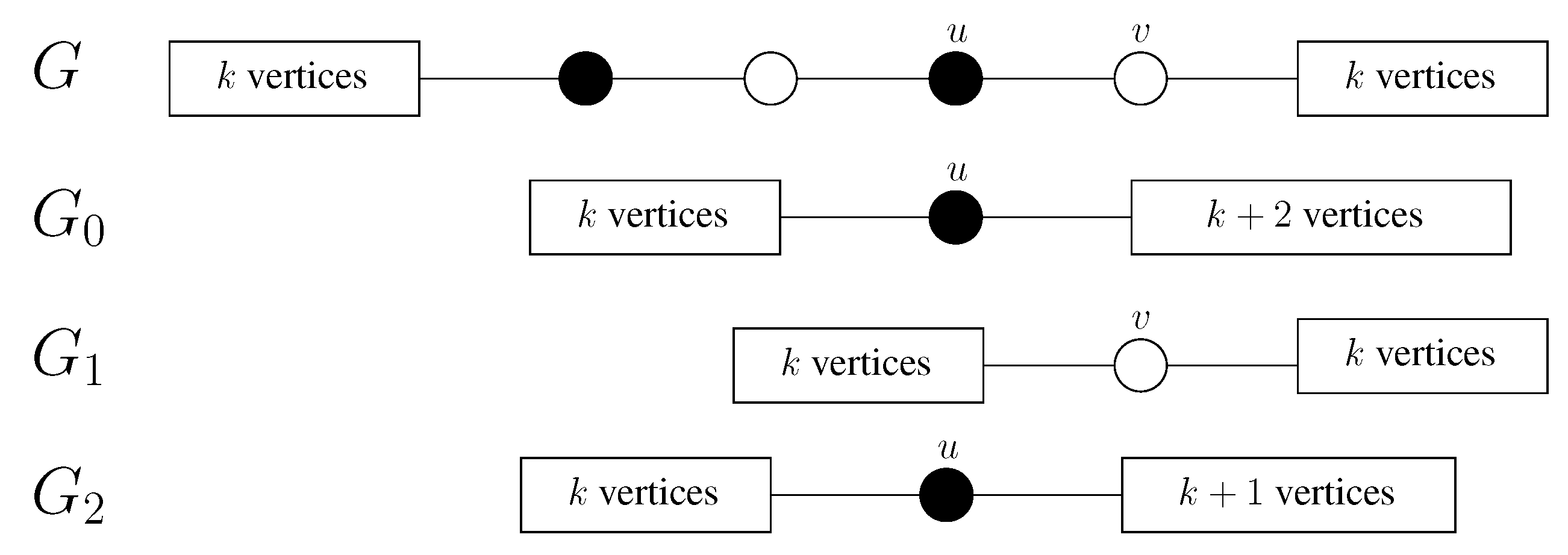
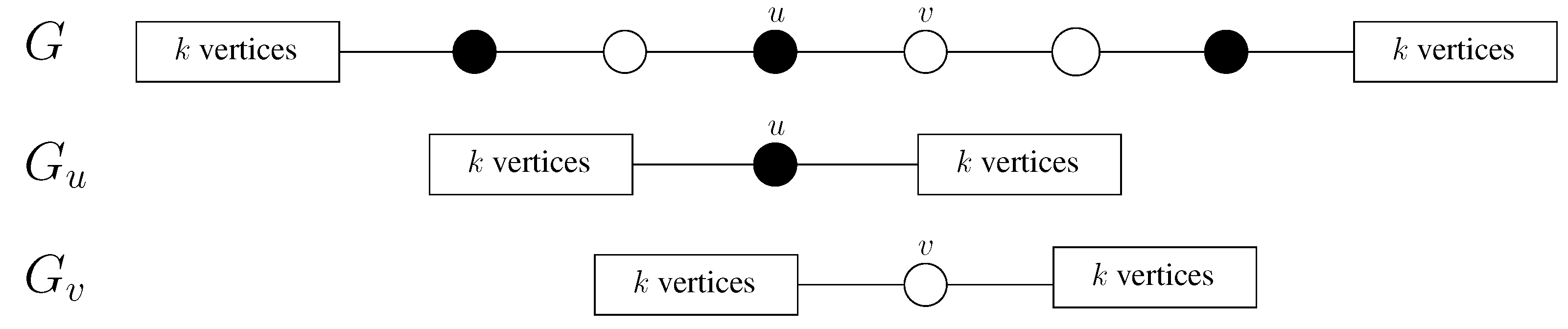
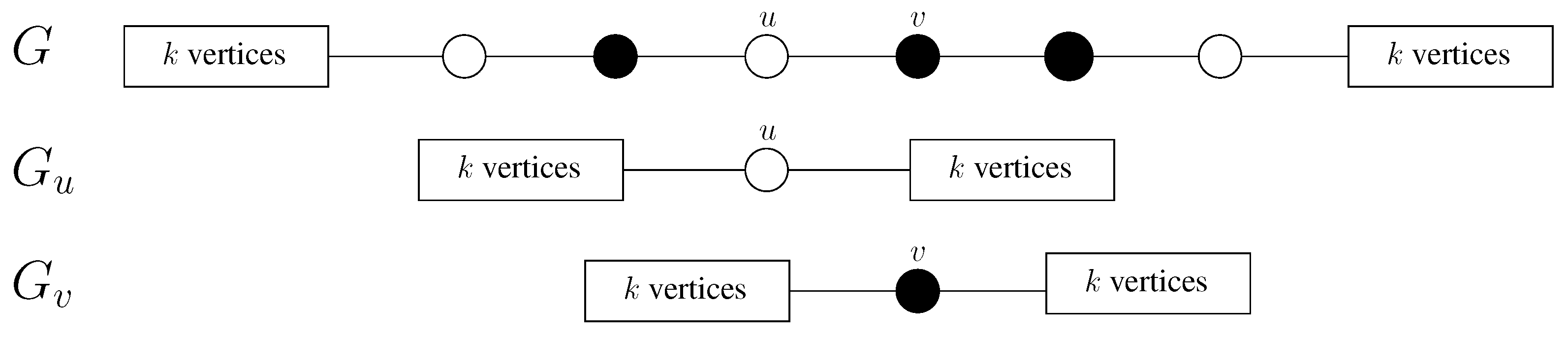
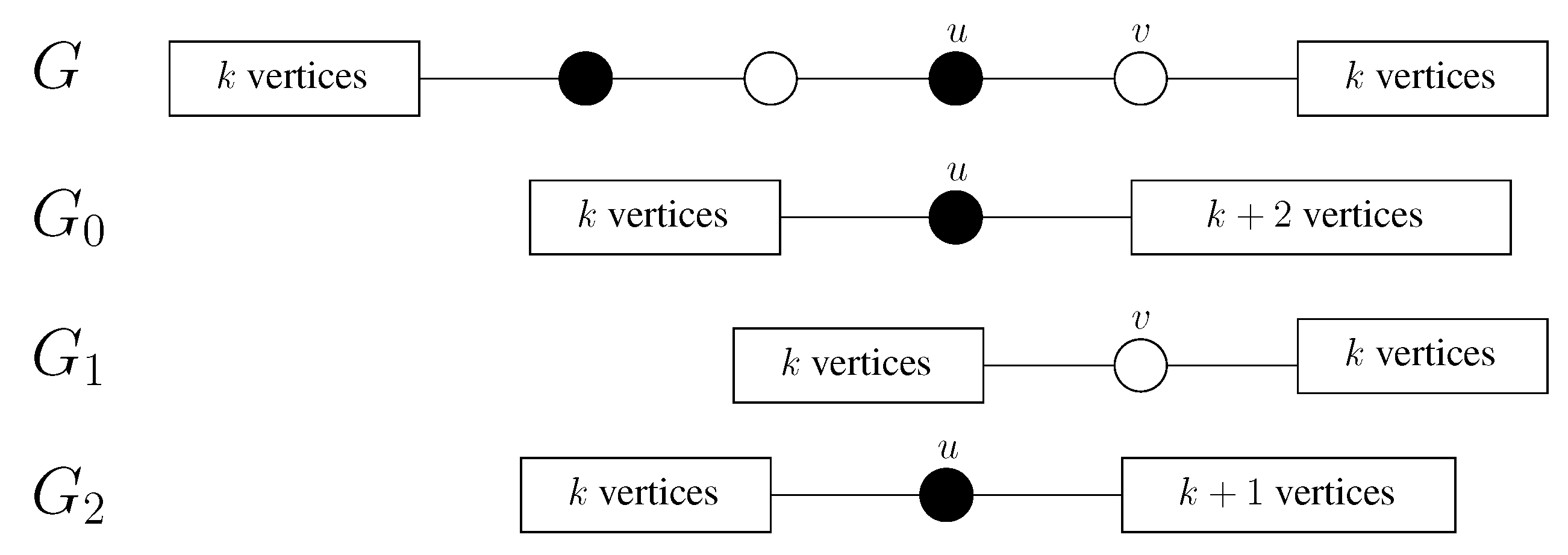
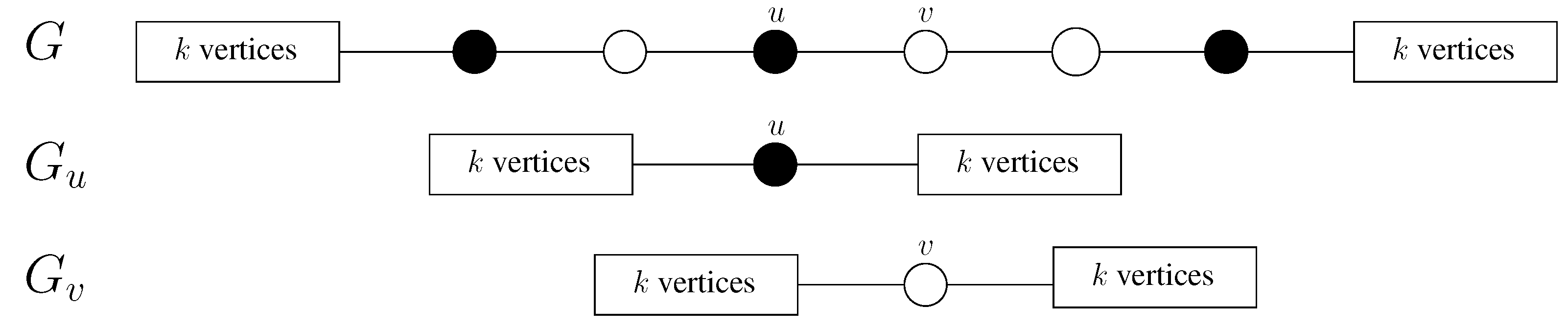
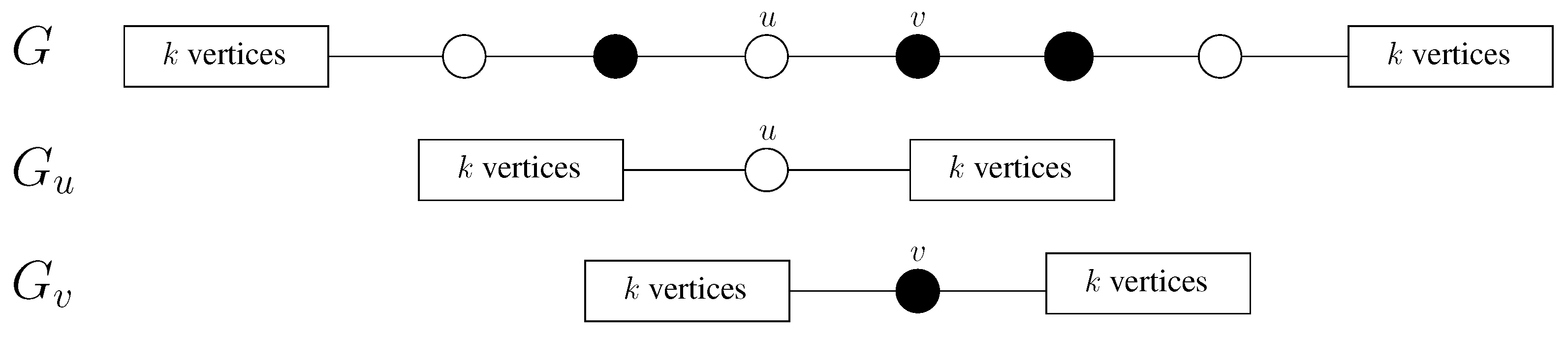
- k ≡ 0 mod 3. Then there must be at least one vertex u ∈ VM such that u ∈ D (otherwise D would not be a dominating set). Consider the graph G0 consisting of u and k vertices on the left and k + 2 vertices on the right of u (see Figure 6). Let D0 be the dominating set which is computed by 𝒜 for G0. An optimal dominating set for G0 has vertices. However, as u ∈ D and the locality of 𝒜 is k it follows that u ∈ D0. Therefore it follows that |D0| ≥ + 1 + = . So the approximation ratio of 𝒜 is a least .
- k ≡ 1 mod 3. We distinguish whether or not there are vertices in VM which are not in D. If all vertices in VM are in D then it holds that |D| ≥ + 4 + = . However, an optimal dominating set for G has at most vertices. So then the approximation ratio of 𝒜 is at least .If there is a vertex v ∈ VM with v ∉ D then we consider the graph G1 which consists of v and k vertices on the left and on the right of v (see Figure 6). Let D1 be the dominating set which is computed by 𝒜 for G1. An optimal dominating set for G1 has vertices. However, as v ∉ D and the locality of 𝒜 is k it follows that v ∉ D1. This implies that |D1| ≥ + 2 + = . So the approximation ratio of 𝒜 is a least . As 1 + ≤ 1 + it follows that if k ≡ 1 mod 3 then the approximation ratio of 𝒜 is a least 1 + .
- k ≡ 2 mod 3. Then there must be at least one vertex u ∈ VM such that u ∈ D (otherwise D would not be a dominating set). Consider the graph G2 consisting of u and k vertices on the left and k + 1 vertices on the right of u (see Figure 6). Let D2 be the dominating set which is computed by 𝒜 for G2. An optimal dominating set for G2 has vertices. However, as u ∈ D and the locality of 𝒜 is k it follows that u ∈ D0. Therefore it follows that |D0| ≥ + 1 + = . So the approximation ratio of 𝒜 is a least .
2.5. Algorithm for Unit Line Graphs
| Algorithm 2: Local algorithm for finding a dominating set in a unit line graph |
| 1 // Algorithm is executed independently by each node v; |
| 2 // let i be the integer such that v ∈ Vi; |
| 3 // let v[i] be vertex with the smallest x-coordinate in Vi; |
| 4 Find all vertices in N(v) and determine Vi; |
| 5 if v = v[i] then become part of the dominating set D else Do not become part of D |
- 1.
- The computed set D is a dominating set for G.
- 2.
- Let DOPT be an optimal dominating set. It holds that |D| ≤ 3 · |DOPT|.
- 3.
- Whether or not a vertex v is in D depends only on the vertices at most one hop away from v, i.e. Algorithm 2 is local.
- 4.
- The processing time for a vertex v is linear in the number of vertices adjacent to v.
3. Connected Dominating Set
3.1. Algorithm for Unit Disk Graphs
- 1.
- The computed set CD is a connected dominating set for G.
- 2.
- Let CDOPT be an optimal connected dominating set. It holds that |CD| ≤ 216 · |CDOPT|.
- 3.
- Whether or not a vertex v is in CD depends only on the vertices, i.e. Algorithm 3 is local.
- 4.
- The processing time for a vertex v is quadratic in the number of vertices adjacent to v.
| Algorithm 3: Local algorithm for finding a connected dominating set in a unit disk graph |
 |

3.2. No Constant Ratio Approximation Algorithm with Locality One


3.3. Lower Bound
3.4. Algorithm for Unit Line Graphs
| Algorithm 4: Local algorithm for finding a connected dominating set in a unit line graph |
| 1 // Algorithm is executed independently by each node v; |
| 2 // let i be the integer such that v ∈ Vi; |
| 3 Find all vertices in N (v) and determine Vi; |
| 4 if v = v[i] or v = v′[i] then become part of the dominating set CD else Do not become part of CD |
- 1.
- The computed set CD is a connected dominating set for G.
- 2.
- Let CDOPT be an optimal connected dominating set. It holds that |D| ≤ 6 · |DOPT|.
- 3.
- Whether or not a vertex v is in CD depends only on the vertices at most one hop away from v, i.e. Algorithm 4 is local.
- 4.
- The processing time for a vertex v is linear in the number of vertices adjacent to v.

4. Independent Set
4.1. Tiling of the Plane
4.2. lgorithm for Unit Disk Graphs
| Algorithm 5: Local algorithm for finding an independent set in a unit disk graph |
 |
- 1.
- The computed set I is an independent set for G.
- 2.
- Let IOPT be an optimal independent set. It holds that|I| ≥ |IOPT|.
- 3.
- Whether or not a vertex v is in I depends only on the vertices at most one hop away from v, i.e. Algorithm 5 is local.
- 4.
- The processing time for a vertex v is linear in the number of vertices adjacent to v.

4.3. Lower Bound
4.4. Algorithm for Unit Line Graphs
| Algorithm 6: Local algorithm for finding an independent set in a unit line graph |
 |
- 1.
- The computed set I is an independent set for G.
- 2.
- Let IOPT be an optimal independent set. It holds that|I| ≥ ⌊ · |IOPT|⌋ and|I| ≥ 1.
- 3.
- Whether or not a vertex v is in I depends only on the vertices which are at most k hops away from v, i.e. Algorithm 6 is local.
- 4.
- The processing time for a vertex v is linear in the number of vertices adjacent to v.
5. Vertex Cover
5.1. Factor 6 Upper Bound
5.2. Algorithm for Unit Disk Graphs
| Algorithm 7: Local algorithm for computing a vertex cover for a unit disk graph G = (V, E) |
| 1 // Algorithm is executed independently by each node v; |
| 2 if |V| ≥ 2 then assign v to V C; |
| 3 else Do not assign v to V C; |
- 1.
- The computed set V C is a vertex cover for G.
- 2.
- Let V COPT be an optimal vertex cover. It holds that|V C| ≤ 6 · |V COPT|.
- 3.
- Whether or not a vertex v is in V C depends only on the vertices at most one hop away from v, i.e. Algorithm 1 is local.
- 4.
- The processing time for a vertex v is constant.
5.3. Lower Bound
5.4. Algorithm for Unit Line Graphs
| Algorithm 8: Local algorithm for computing a vertex cover in a unit line graph |
| 1 // Algorithm is executed independently by each node v; |
| 2 // let vL be the leftmost vertex of G; |
| 3 Explore the vertices in N (v); |
| 4 if v = vL then become part of the vertex cover V C else do not become part of V C |
- 1.
- The computed set V C is a vertex cover for G.
- 2.
- Let V COPT be an optimal dominating set. It holds that |V C| ≤ 2 · |V COPT|.
- 3.
- Whether or not a vertex v is in V C depends only on the vertices which are at most one hop away from v, i.e. Algorithm 8 is local.
- 4.
- The processing time for a vertex v is linear in the number of vertices adjacent to v.
6. Conclusion
References
- Dulman, S.; van Hoesel, L.; Nieberg, T.; Havinga, P. Collaborative Communication Protocols for Wireless Sensor Networks. In IEEE ISADS, European Research on Middleware and Architectures for Complex and Embedded Systems Workshop, Pisa, Italy, April 9-11 2003.
- Linial, N. Locality in distributed graph algorithms. SIAM J. Comput. 1992, 21(1), 193–201. [Google Scholar] [CrossRef]
- Naor, M.; Stockmeyer, L. What can be computed locally? In STOC ’93: Proceedings of the twenty-fifth annual ACM symposium on Theory of computing; ACM Press: New York, NY, USA, 1993; pp. 184–193. [Google Scholar]
- Peleg, D. Distributed Computing: A Locality-Sensitive Approach SIAM. 2000.
- Garay, M.; Johnson, D. Computers and Intractability: A Guide to the theory of NP-completeness; Freeman NY, 1979. [Google Scholar]
- Raz, R.; Safra, S. A sub-constant error-probability low-degree test, and a sub-constant error-probability PCP characterization of NP. In Proceedings of the 29th Annual ACM Symposium on the Theory of Computing (STOC ’97), New York, 1997; Association for Computing Machinery; pp. 475–484.
- Håstad, J. Clique is hard to approximate within n1 − ϵ. Electronic Colloquium on Computational Complexity (ECCC) 1997, 4(38). [Google Scholar]
- Bar-Yehuda, R.; Even, S. A local-ratio theorem for approximating the weighted vertex cover prob-lem. Annals of Discrete Mathematics 1985, 25, 27–45. [Google Scholar]
- Clark, B. N.; Colbourn, C. J.; Johnson, D. S. Unit disk graphs. Discrete Math 1990, 86(1-3), 165–177. [Google Scholar] [CrossRef]
- Marathe, M. V.; Breu, H.; Hunt, H. B., III; Ravi, S. S.; Rosenkrantz, D. J. Simple heuristics for unit disk graphs. Networks 1995, 25(1), 59–68. [Google Scholar] [CrossRef]
- Hunt, H. B., III; Marathe, M. V.; Radhakrishnan, V.; Ravi, S. S.; Rosenkrantz, D. J.; Stearns, R. E. NC-approximation schemes for NP-and PSPACE-hard problems for geometric graphs. J. Algorithms 1998, 26(2), 238–274. [Google Scholar] [CrossRef]
- Nieberg, T.; Hurink, J. L.; Kern, W. A robust PTAS for maximum weight independent sets in unit disk graphs. In Graph-Theoretic Concepts in Computer Science: 30th International Workshop, WG 2004, Bad Honnef, Germany; volume 3353 of Lecture Notes in Computer Science. c, J. H., Nagel, M., Westfechtel, B., Eds.; Springer LNCS: Berlin, 2004; pp. 214–221. [Google Scholar]
- Nieberg, T.; Hurink, J. L. A PTAS for the minimum dominating set problem in unit disk graphs. In 3rd International Workshop on Approximation and Online Algorithms, WAOA 2005, Palma de Mallorca, Spain; volume 3879 of Lecture Notes in Computer Science. Erlebach, T., Persiano, G., Eds.; Springer LNCS: Heidelberg, Germany, 2006; pp. 296–306. [Google Scholar]
- Kuhn, F.; Nieberg, T.; Moscibroda, T.; Wattenhofer, R. Local approximation schemes for ad hoc and sensor networks. In DIALM-POMC ’05: Proceedings of the 2005 joint workshop on Foundations of mobile computing; ACM Press: New York, NY, USA, 2005; pp. 97–103. [Google Scholar]
- Gfeller, B.; Vicari, E. A faster distributed approximation scheme for the connected dominating set problem for growth-bounded graphs. In ADHOC-NOW; Kranakis, E., Opatrny, J., Eds.; volume 4686 of Lecture Notes in Computer Science. Springer LNCS, 2007; pp. 59–73. [Google Scholar]
- Dai, F.; Wu, J. An Extended Localized Algorithm for Connected Dominating Set Formation in Ad Hoc Wireless Networks. In IEEE TRANSACTIONS ON PARALLEL AND DISTRIBUTED SYSTEMS 2004; 2004; pp. 908–920. [Google Scholar]
- Czyzowicz, J.; Dobrev, S.; Fevens, T.; González-Aguilar, H.; Kranakis, E.; Opatrny, J.; Urrutia, J. Local algorithms for dominating and connected dominating sets of unit disk graphs with location aware nodes. Laber, E. S., Bornstein, C. F., Nogueira, L. T., Faria, L., Eds.; volume 4957 of Lecture Notes in Computer Science; Springer, 2008; pp. 158–169. [Google Scholar]
- Wiese, A.; Kranakis, E. Local PTAS for Dominating and Connected Dominating Set in Location Aware UDGs. In 6th Workshop on Approximation and Online Algorithms (WAOA), Universitaet Karlsruhe, Germany, September 18-19, 2008; Springer LNCS, 2008. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Problem | UDG one hop | ULG one hop | Lower bound for locality k |
| Dominating Set | 12 · OPT | 3 · OPT | 1 + 3/(2k + 3) |
| Independent Set | 1/1801 · OPT | ⌊1/2 · OPT⌋ | 1 + 1/k |
| Vertex Cover | 6 · OPT | 2 · OPT | 1 + 1/k |
| Connected Dominating Set | |
| UDG one hop | no local constant ratio algorithm |
| UDG two hops | 216 · OPT |
| ULG one hop | 6 · OPT |
| Lower bound for locality k | 1 + 1/k |
© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wiese, A.; Kranakis, E. Impact of Locality on Location Aware Unit Disk Graphs. Algorithms 2008, 1, 2-29. https://doi.org/10.3390/a1010002
Wiese A, Kranakis E. Impact of Locality on Location Aware Unit Disk Graphs. Algorithms. 2008; 1(1):2-29. https://doi.org/10.3390/a1010002
Chicago/Turabian StyleWiese, Andreas, and Evangelos Kranakis. 2008. "Impact of Locality on Location Aware Unit Disk Graphs" Algorithms 1, no. 1: 2-29. https://doi.org/10.3390/a1010002
APA StyleWiese, A., & Kranakis, E. (2008). Impact of Locality on Location Aware Unit Disk Graphs. Algorithms, 1(1), 2-29. https://doi.org/10.3390/a1010002