Multiscale Statistical Analysis of Massive Corrosion Pits Based on Image Recognition of High Resolution and Large Field-of-View Images


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Material and Methods
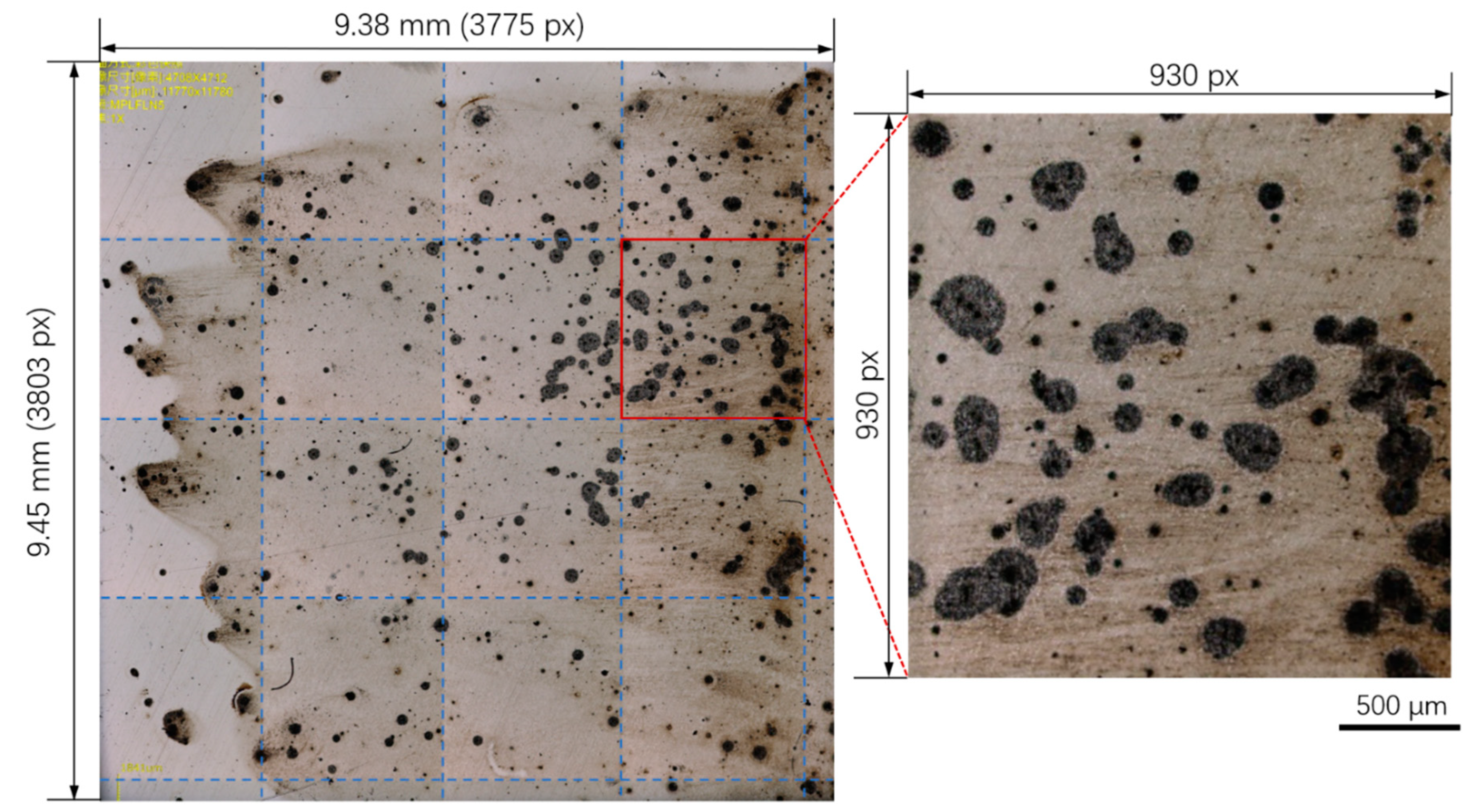
2.1. Material and Corrosion Tests
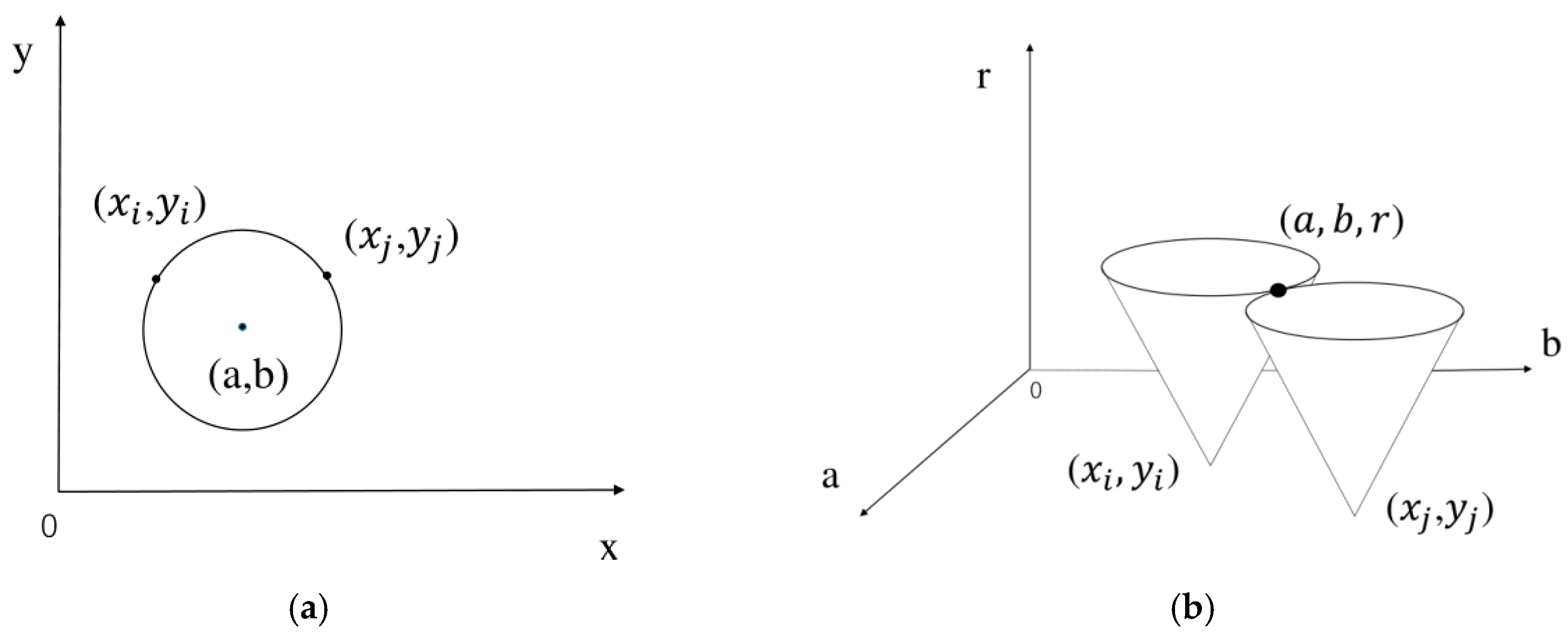
2.2. Image-Recognition Method
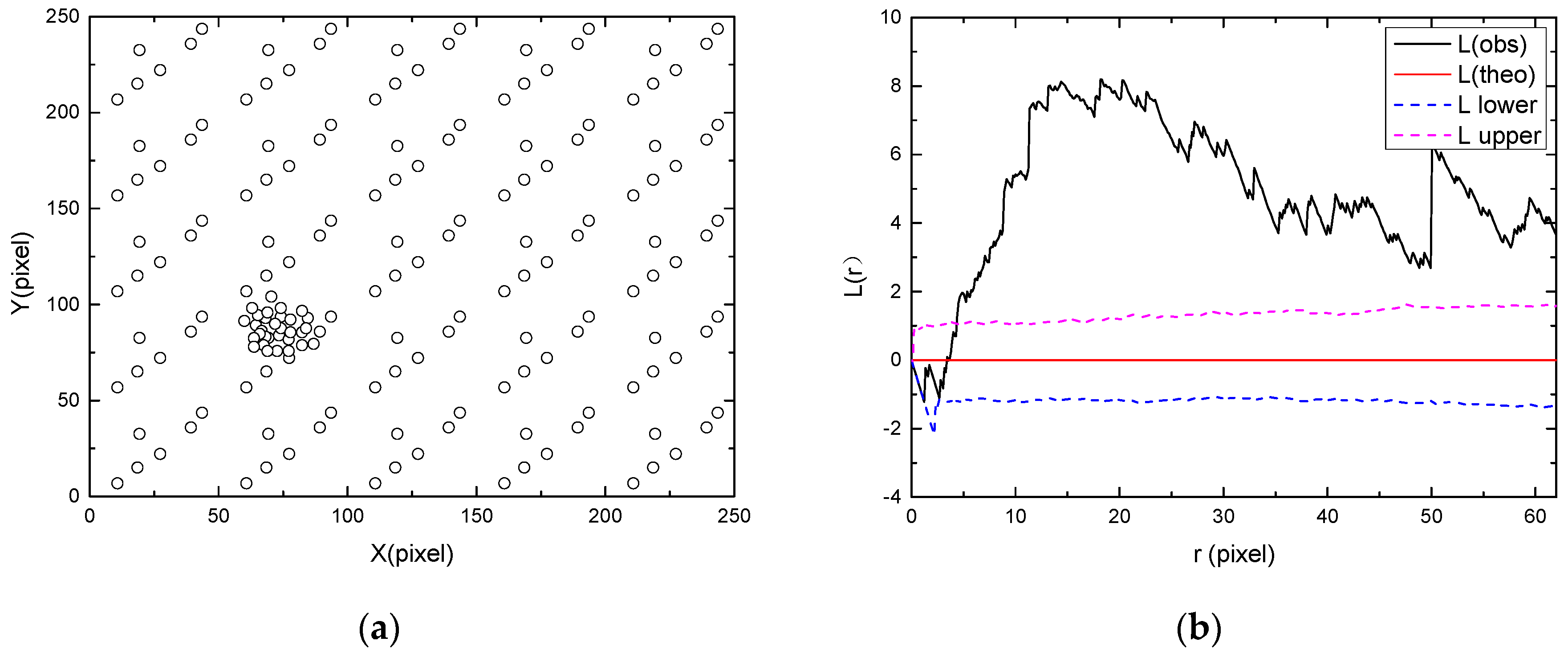
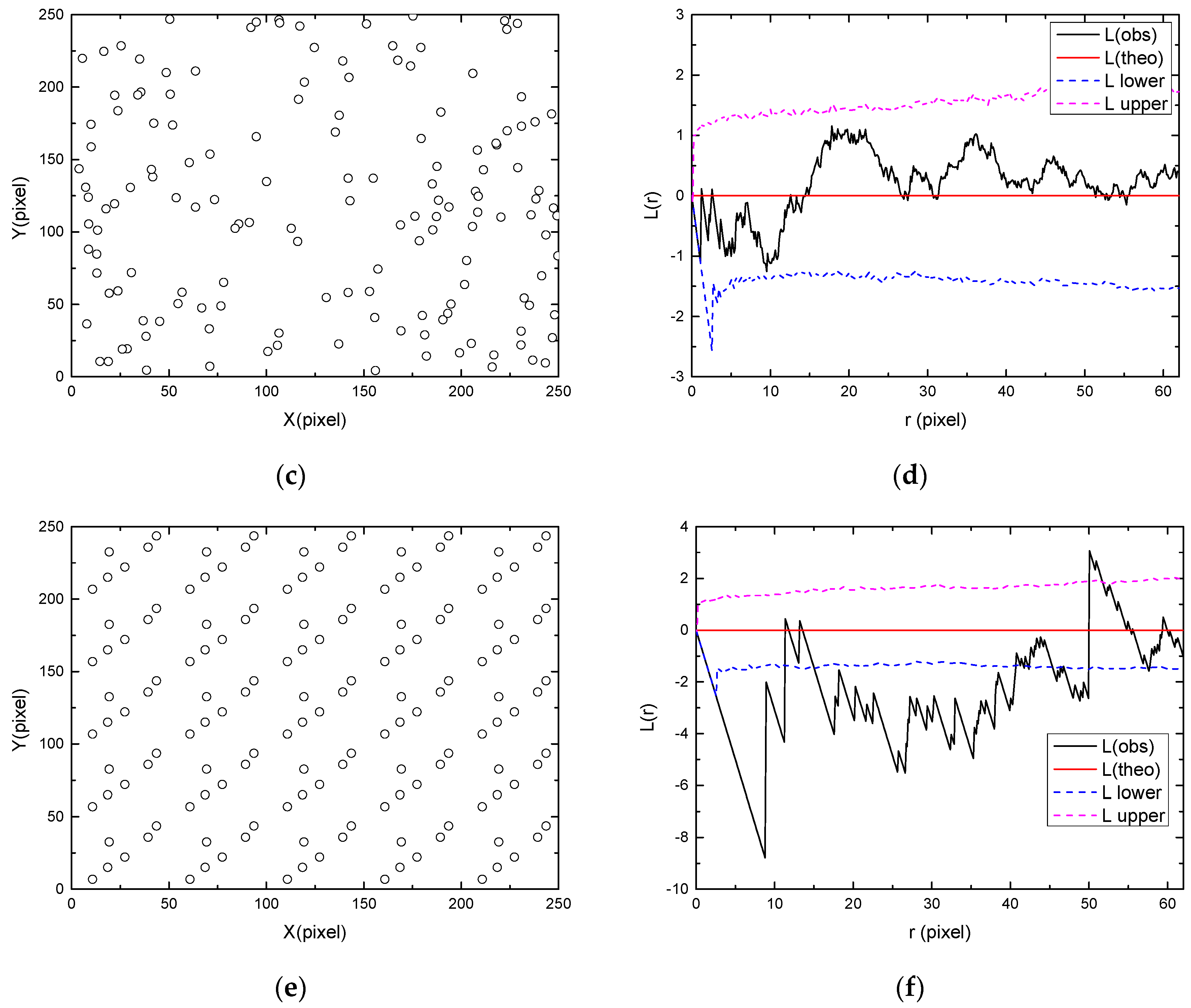
2.3. Multiscale Spatial Point Pattern
3. Results and Discussion
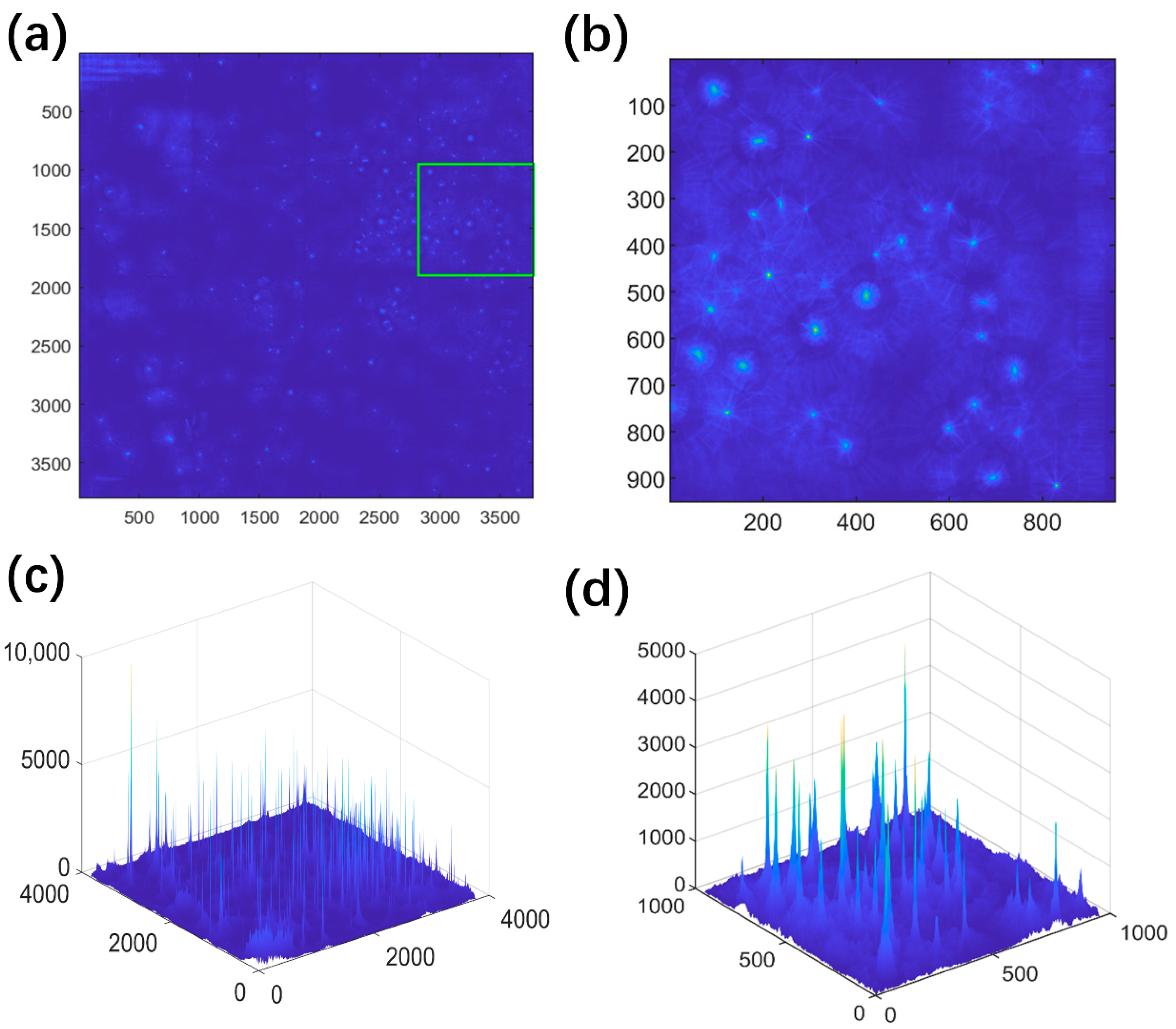
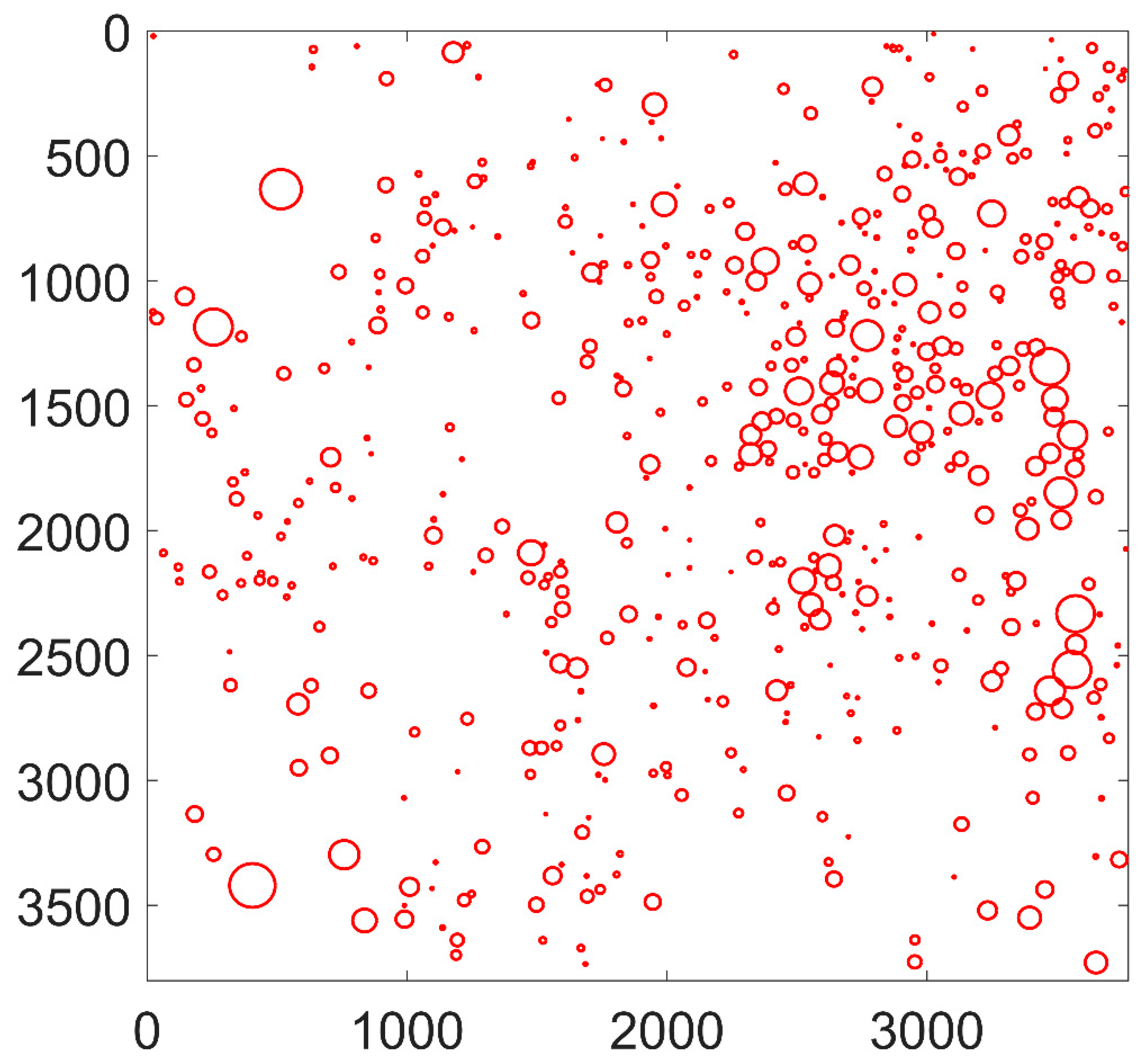
3.1. Image Recognition
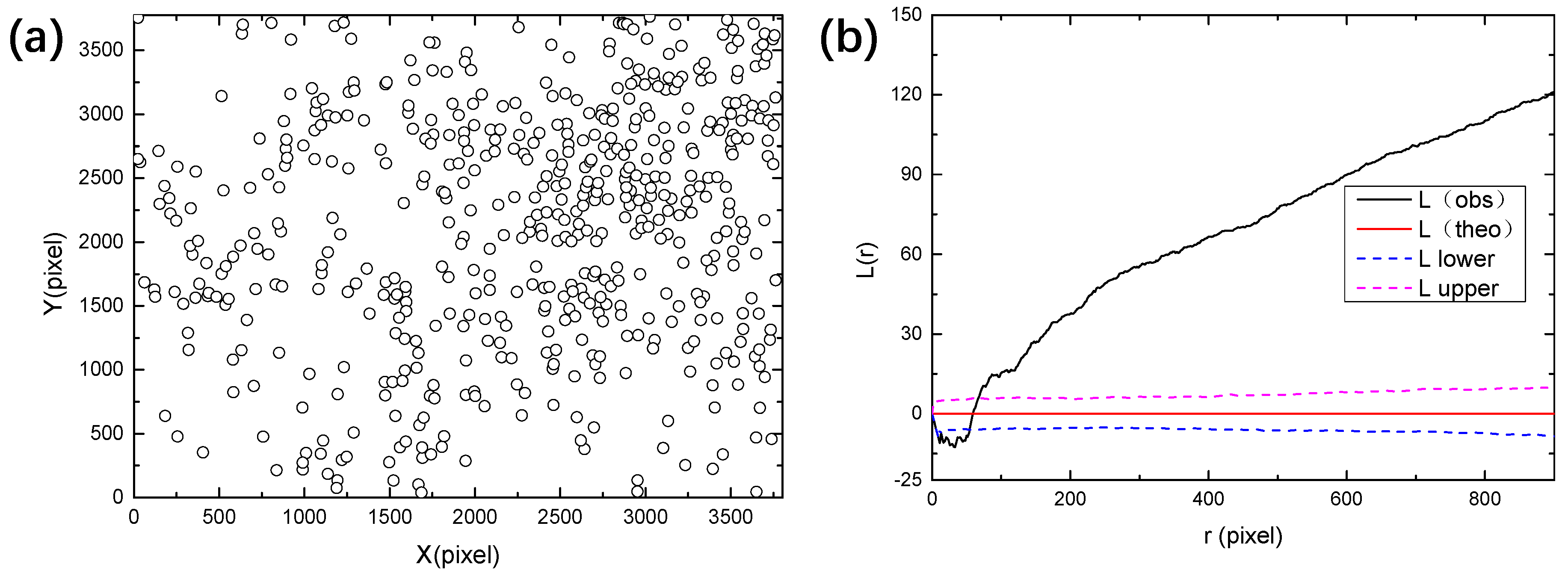
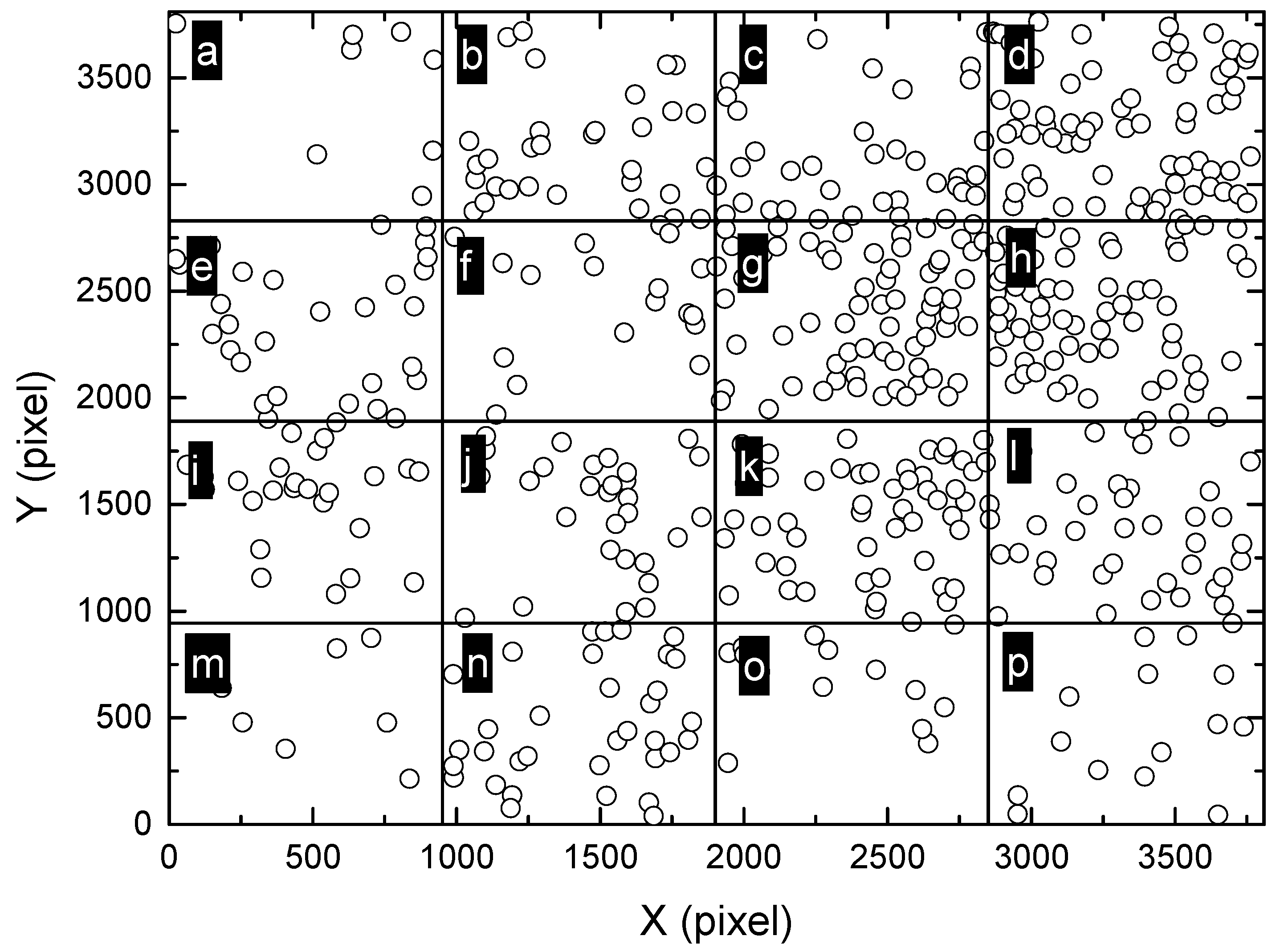
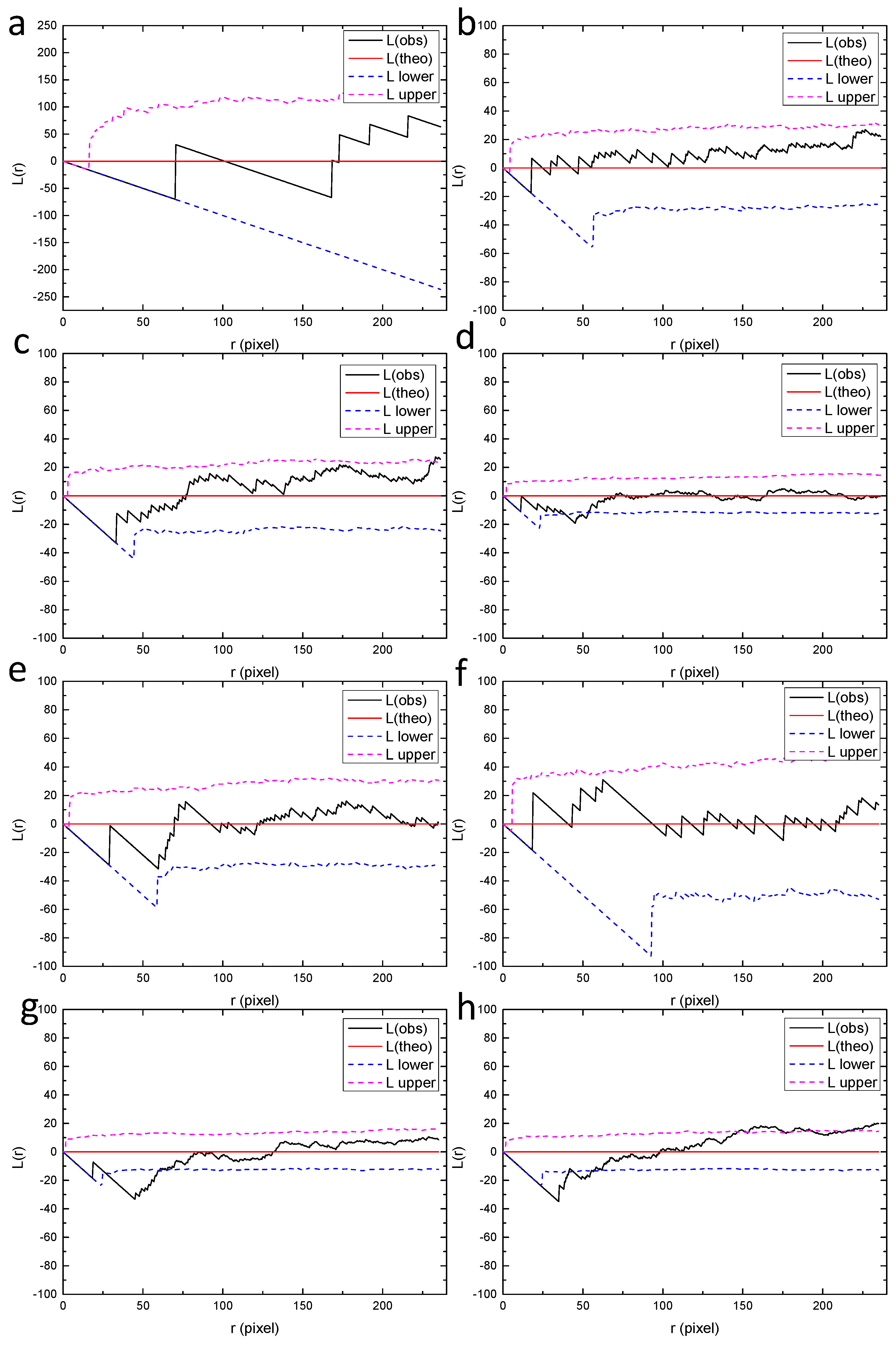
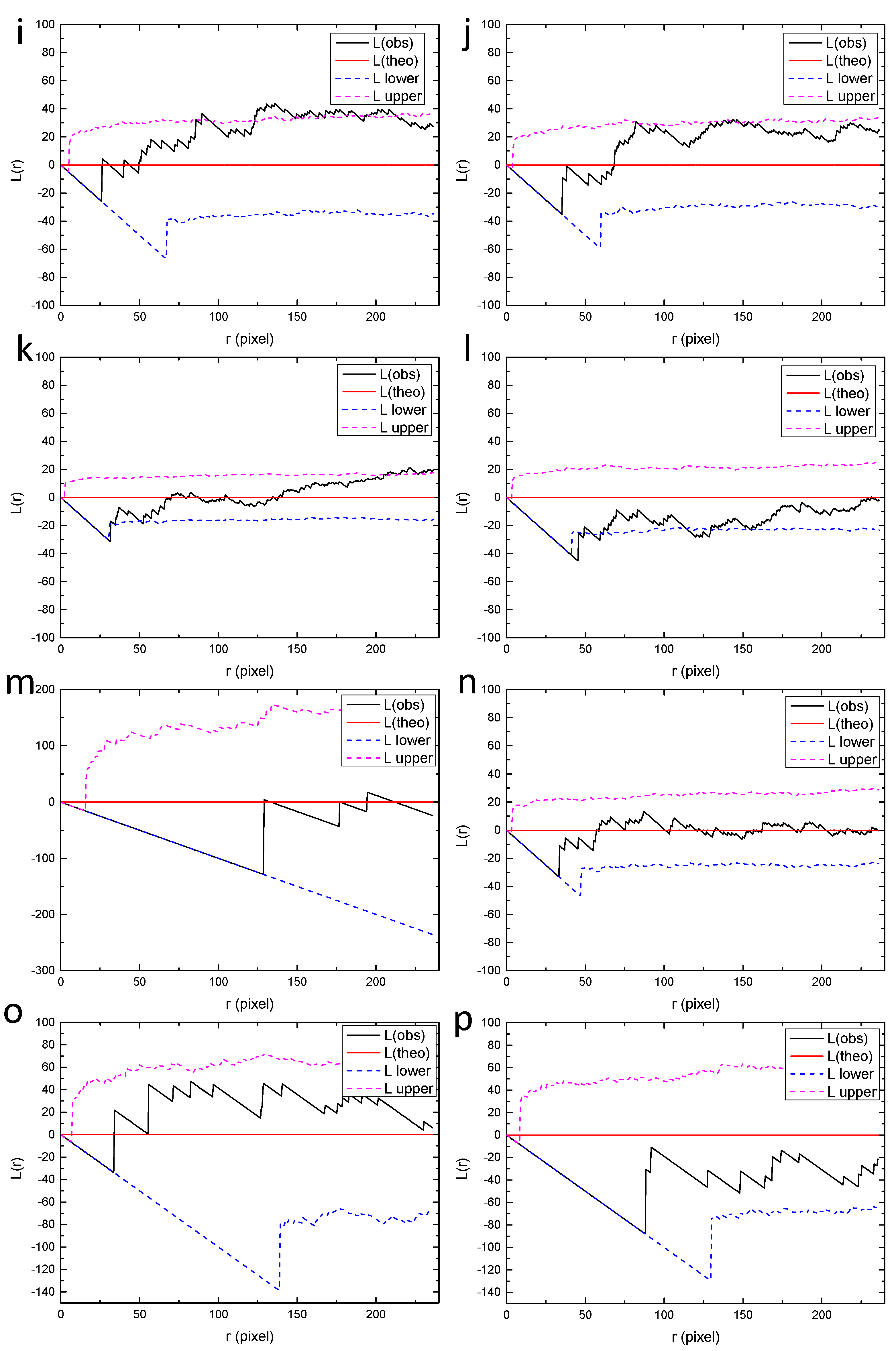
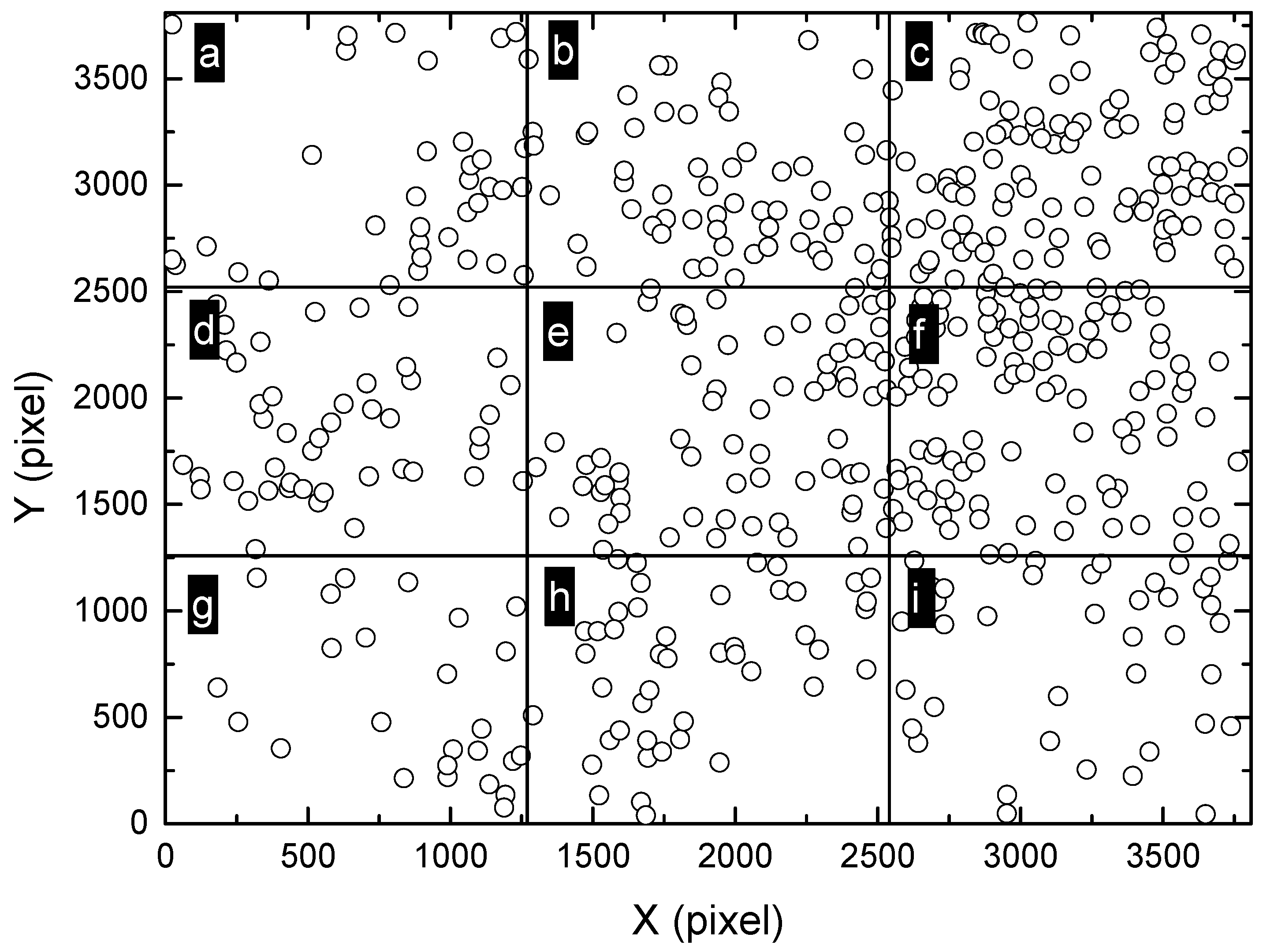
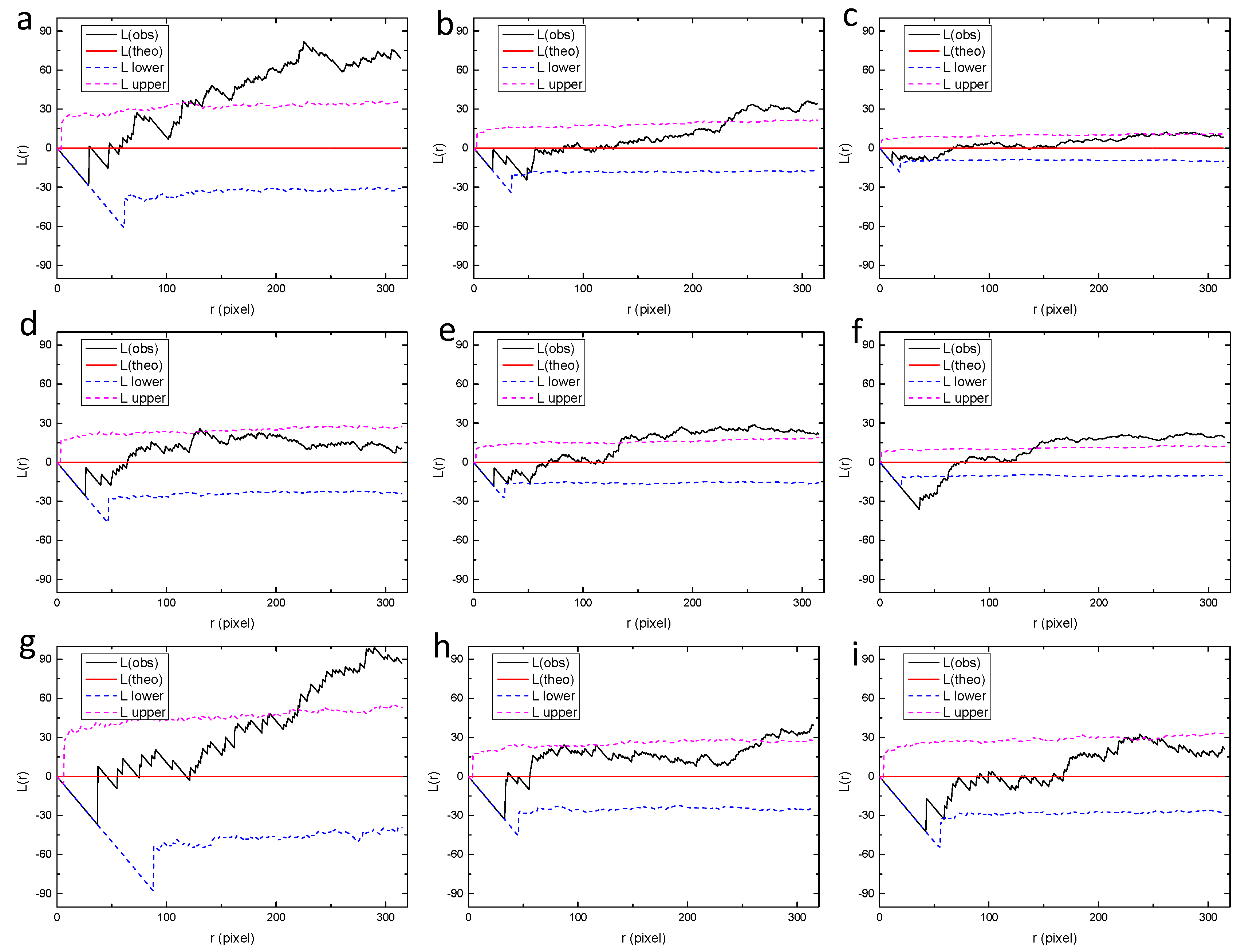
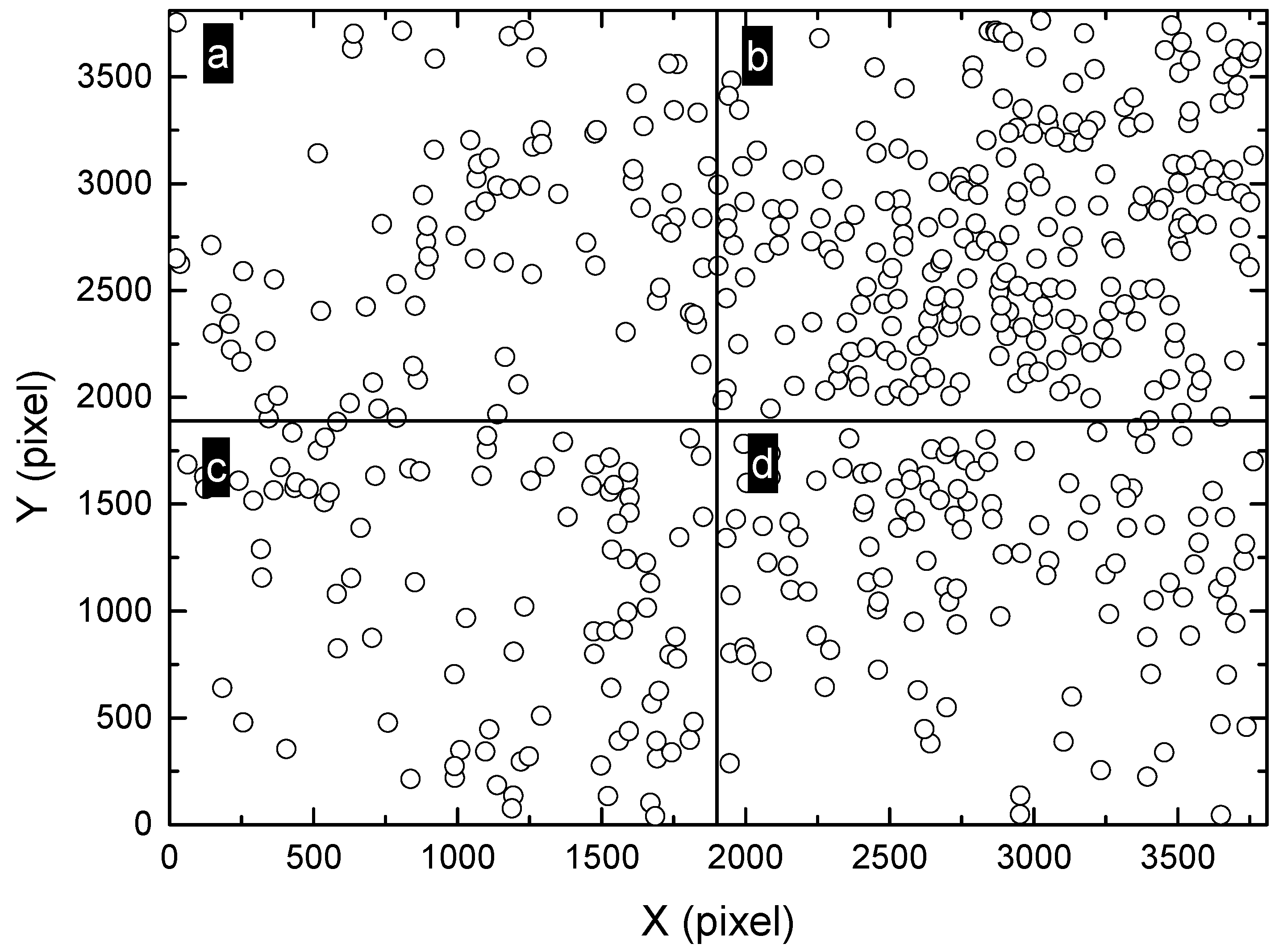
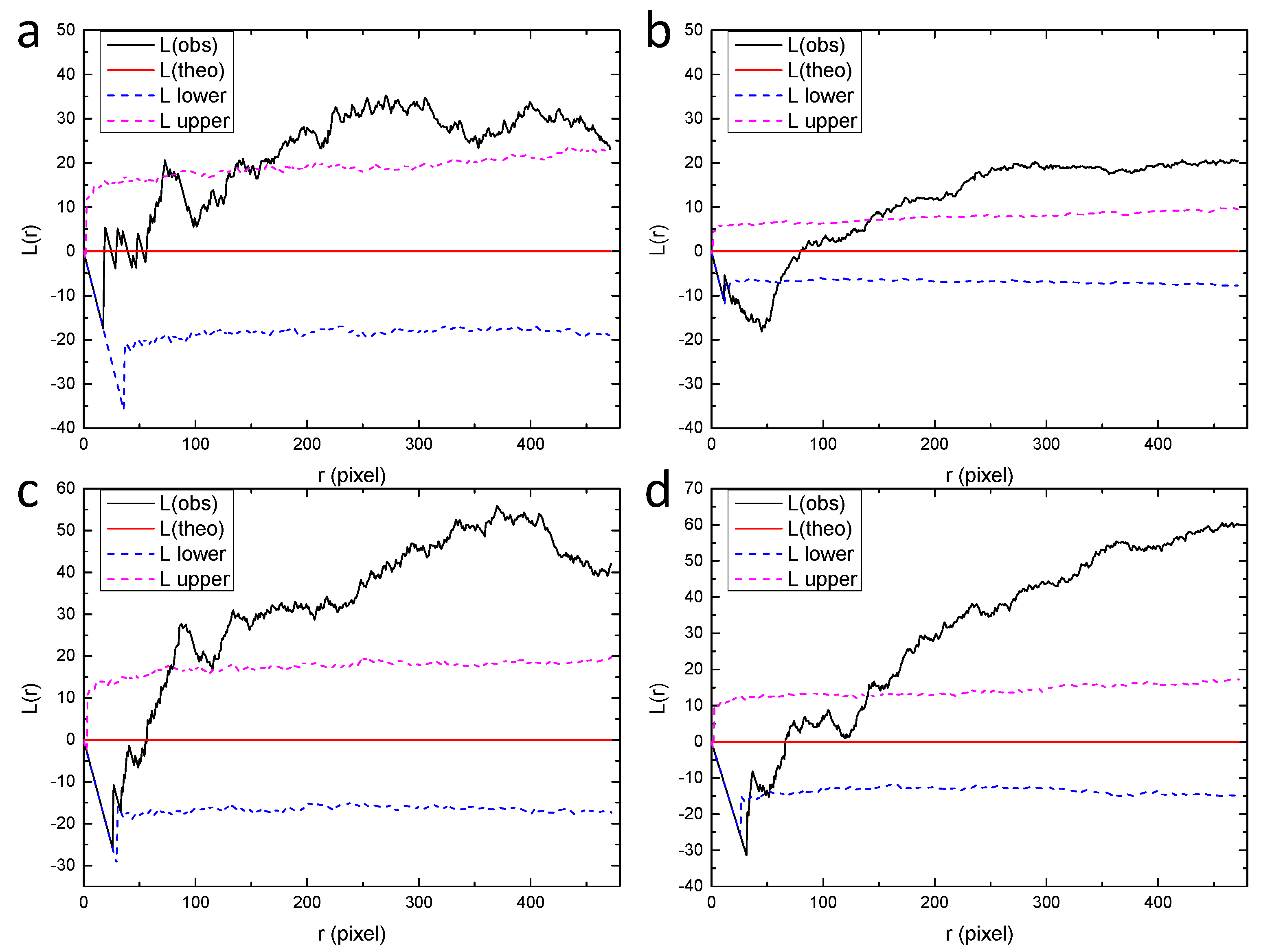
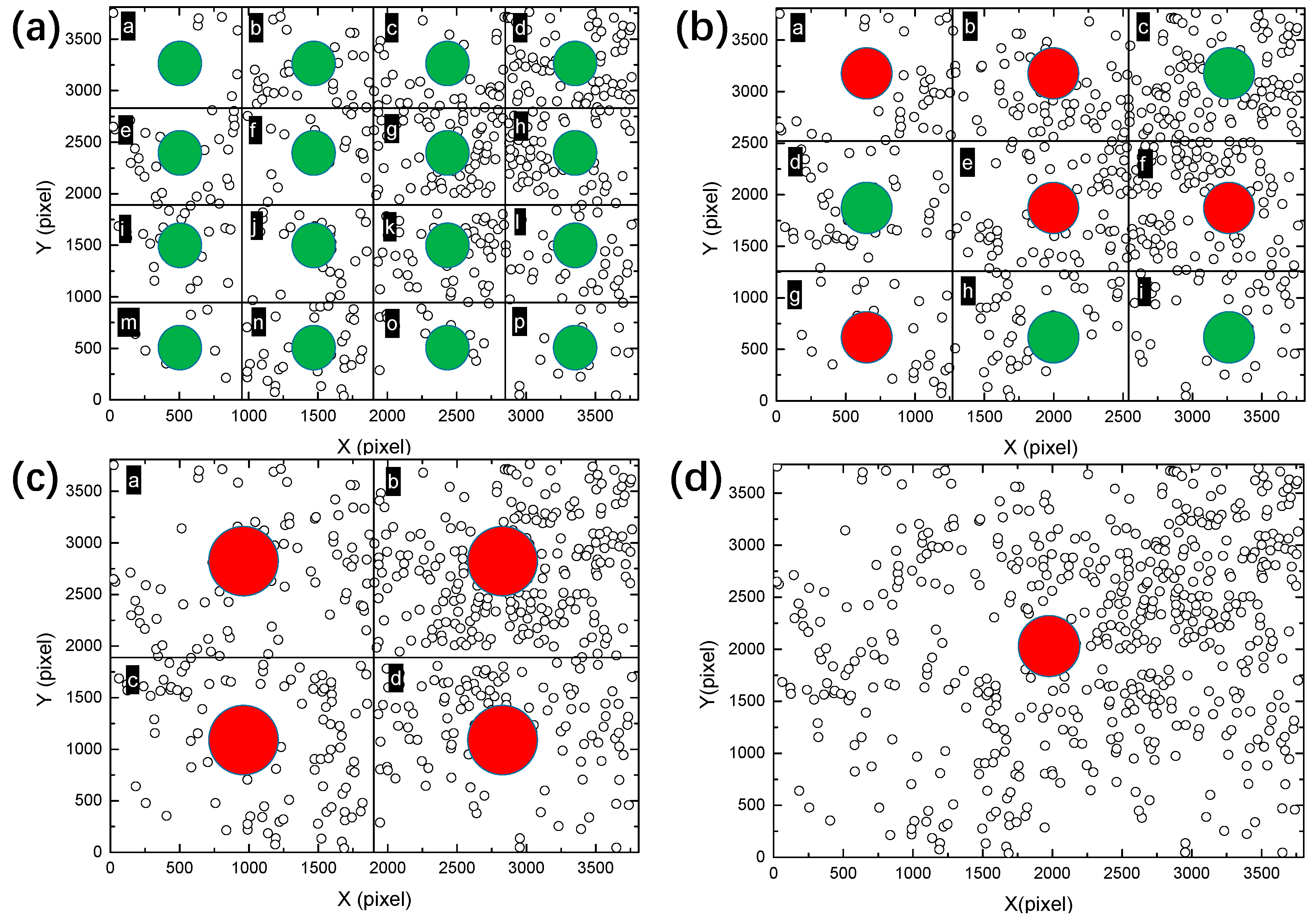
3.2. Multiscale Spatial Distribution
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shibaeva, T.V.; Laurinavichyute, V.K.; Tsirlina, G.A.; Arsenkin, A.M.; Grigorovich, K.V. The effect of microstructure and non-metallic inclusions on corrosion behavior of low carbon steel in chloride containing solutions. Corros. Sci. 2014, 80, 299–308. [Google Scholar] [CrossRef]
- Zhang, S.; Hou, L.; Du, H.; Wei, H.; Liu, B.; Wei, Y. A study on the interaction between chloride ions and CO2 towards carbon steel corrosion. Corros. Sci. 2020, 167, 108531. [Google Scholar] [CrossRef]
- Yu, J.; Wang, H.; Yu, Y.; Luo, Z.; Liu, W.; Wang, C. Corrosion behavior of X65 pipeline steel: Comparison of wet–Dry cycle and full immersion. Corros. Sci. 2018, 133, 276–287. [Google Scholar] [CrossRef]
- Pesinis, K.; Tee, K.F. Statistical model and structural reliability analysis for onshore gas transmission pipelines. Eng. Fail. Anal. 2017, 82, 1–15. [Google Scholar] [CrossRef]
- Belvederesi, C.; Thompson, M.S.; Komers, P.E. Statistical analysis of environmental consequences of hazardous liquid pipeline accidents. Heliyon 2018, 4, e00901. [Google Scholar] [CrossRef]
- Chen, C.-H.; Sheen, Y.-N.; Wang, H.-Y. Case analysis of catastrophic underground pipeline gas explosion in Taiwan. Eng. Fail. Anal. 2016, 65, 39–47. [Google Scholar] [CrossRef]
- Biezma, M.V.; Andrés, M.A.; Agudo, D.; Briz, E. Most fatal oil & gas pipeline accidents through history: A lessons learned approach. Eng. Fail. Anal. 2020, 110, 104446. [Google Scholar]
- Cirimello, P.G.; Otegui, J.L.; Buisel, L.M. Explosion in gas pipeline: Witnesses’ perceptions and expert analyses’ results. Eng. Fail. Anal. 2019, 106, 104142. [Google Scholar] [CrossRef]
- Gong, P.; Zhang, G.; Chen, J. The Corrosion Features of Q235B Steel under Immersion Test and Electrochemical Measurements in Desulfurization Solution. Materials 2020, 13, 3783. [Google Scholar] [CrossRef]
- Hoseinpoor, M.; Momeni, M.; Moayed, M.H.; Davoodi, A. EIS assessment of critical pitting temperature of 2205 duplex stainless steel in acidified ferric chloride solution. Corros. Sci. 2014, 80, 197–204. [Google Scholar] [CrossRef]
- Duan, Z.; Man, C.; Dong, C.; Cui, Z.; Kong, D.; Wang, L.; Wang, X. Pitting behavior of SLM 316L stainless steel exposed to chloride environments with different aggressiveness: Pitting mechanism induced by gas pores. Corros. Sci. 2020, 167, 108520. [Google Scholar] [CrossRef]
- Brewick, P.T.; DeGiorgi, V.G.; Geltmacher, A.B.; Qidwai, S.M. Modeling the influence of microstructure on the stress distributions of corrosion pits. Corros. Sci. 2019, 158, 108111. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, G.; Wu, W.; Li, Y. Role of inclusions in the pitting initiation of pipeline steel and the effect of electron irradiation in SEM. Corros. Sci. 2018, 130, 252–260. [Google Scholar] [CrossRef]
- Wang, L.; Xin, J.; Cheng, L.; Zhao, K.; Sun, B.; Li, J.; Wang, X.; Cui, Z. Influence of inclusions on initiation of pitting corrosion and stress corrosion cracking of X70 steel in near-neutral pH environment. Corros. Sci. 2019, 147, 108–127. [Google Scholar] [CrossRef]
- Liu, C.; Revilla, R.I.; Zhang, D.; Liu, Z.; Lutz, A.; Zhang, F.; Zhao, T.; Ma, H.; Li, X.; Terryn, H. Role of Al2O3 inclusions on the localized corrosion of Q460NH weathering steel in marine environment. Corros. Sci. 2018, 138, 96–104. [Google Scholar] [CrossRef]
- Liu, C.; Revilla, R.I.; Liu, Z.; Zhang, D.; Li, X.; Terryn, H. Effect of inclusions modified by rare earth elements (Ce, La) on localized marine corrosion in Q460NH weathering steel. Corros. Sci. 2017, 129, 82–90. [Google Scholar] [CrossRef]
- Zheng, S.; Li, C.; Qi, Y.; Chen, L.; Chen, C. Mechanism of (Mg,Al,Ca)-oxide inclusion-induced pitting corrosion in 316L stainless steel exposed to sulphur environments containing chloride ion. Corros. Sci. 2013, 67, 20–31. [Google Scholar] [CrossRef]
- Liu, C.; Jiang, Z.; Zhao, J.; Cheng, X.; Liu, Z.; Zhang, D.; Li, X. Influence of rare earth metals on mechanisms of localised corrosion induced by inclusions in Zr-Ti deoxidised low alloy steel. Corros. Sci. 2020, 166, 108463. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, G.; Wu, W.; Qiao, Q.; Li, Y.; Li, X. Effect of pH and chloride on the micro-mechanism of pitting corrosion for high strength pipeline steel in aerated NaCl solutions. Appl. Surf. Sci. 2015, 349, 746–756. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, G.; Li, Y. Observation of the pitting corrosion and uniform corrosion for X80 steel in 3.5 wt.% NaCl solutions using in-situ and 3-D measuring microscope. Corros. Sci. 2016, 111, 508–517. [Google Scholar] [CrossRef]
- Abass, A.; Wada, K.; Matsunaga, H.; Remes, H.; Vuorio, T. Quantitative characterization of the spatial distribution of corrosion pits based on nearest neighbor analysis. Corrosion 2020, 76, 861–870. [Google Scholar] [CrossRef]
- Sauzay, M.; Kubin, L.P. Scaling laws for dislocation microstructures in monotonic and cyclic deformation of fcc metals. Prog. Mater. Sci. 2011, 56, 725–784. [Google Scholar] [CrossRef]
- Lebyodkin, M.; Bougherira, Y.; Lebedkina, T.; Entemeyer, D. Scaling in the local strain-rate field during Jerky flow in an Al-3%Mg alloy. Metals 2020, 10, 134. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, G. Application of gradient-based Hough transform to the detection of corrosion pits in optical images. Appl. Surf. Sci. 2016, 366, 9–18. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, G. Quantitative evaluation of pit sizes for high strength steel: Electrochemical noise, 3-D measurement, and image-recognition-based statistical analysis. Mater. Des. 2016, 94, 176–185. [Google Scholar] [CrossRef]
- Peng, T.; Balijepalli, A.; Gupta, S.K.; Lebrun, T.W. Algorithms for on-line monitoring of micro spheres in an optical tweezers-based assembly cell. J. Comput. Inf. Sci. Eng. 2006, 7, 330–338. [Google Scholar] [CrossRef]
- Ballard, D.H. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recognit. 1981, 13, 111–122. [Google Scholar] [CrossRef]
- Illingworth, J.; Kittler, J. A survey of the hough transform. Comput. Vis. Graph. Image Process. 1988, 44, 87–116. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Baddeley, A.; Turner, R. spatstat: An R package for analyzing spatial point patterns. J. Stat. Softw. 2005, 12, 1–42. [Google Scholar] [CrossRef]
- Ward, J.S.; Parker, G.R.; Ferrandino, F.J. Long-term spatial dynamics in an old-growth deciduous forest. For. Ecol. Manag. 1996, 83, 189–202. [Google Scholar] [CrossRef]
- Kiskowski, M.; Hancock, J.F.; Kenworthy, A.K. On the use of Ripley’s K-function and its derivatives to analyze domain size. Biophys. J. 2009, 97, 1095–1103. [Google Scholar] [CrossRef] [PubMed]
- Marcoux, M.; Larocque, G.; Auger-Méthé, M.; Dutilleul, P.; Humphries, M.M. Statistical analysis of animal observations and associated marks distributed in time using Ripley’s functions. Anim. Behav. 2010, 80, 329–337. [Google Scholar] [CrossRef]
- Budiansky, N.D.; Organ, L.; Hudson, J.L.; Scully, J.R. Detection of interactions among localized pitting sites on stainless steel using spatial statistics. J. Electrochem. Soc. 2005, 152, B152–B160. [Google Scholar] [CrossRef]
- Liu, Q.; Li, Z.; Deng, M.; Tang, J.; Mei, X. Modeling the effect of scale on clustering of spatial points. Comput. Environ. Urban Syst. 2015, 52, 81–92. [Google Scholar] [CrossRef]
- Cawley, N.; Harlow, D. Spatial statistics of particles and corrosion pits in 2024-T3 aluminium alloy. J. Mater. Sci. 1996, 31, 5127–5134. [Google Scholar] [CrossRef]
- López De La Cruz, J.; Lindelauf, R.H.A.; Koene, L.; Gutiérrez, M.A. Stochastic approach to the spatial analysis of pitting corrosion and pit interaction. Electrochem. Commun. 2007, 9, 325–330. [Google Scholar] [CrossRef]
- Organ, L.; Scully, J.R.; Mikhailov, A.S.; Hudson, J.L. A spatiotemporal model of interactions among metastable pits and the transition to pitting corrosion. Elctrochem. Acta 2005, 51, 225–241. [Google Scholar] [CrossRef]
- Haase, P. Spatial pattern analysis in ecology based on Ripley’s K-function: Introduction and methods of edge correction. J. Veg. Sci. 1995, 6, 575–582. [Google Scholar] [CrossRef]
- Illian, J.; Penttinen, A.; Stoyan, H.; Stoyan, D. Statistical Analysis and Modelling of Spatial Point Patterns; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Tian, Z.; Hu, S. Multiscale Statistical Analysis of Massive Corrosion Pits Based on Image Recognition of High Resolution and Large Field-of-View Images. Materials 2020, 13, 4695. https://doi.org/10.3390/ma13214695
Wang Y, Tian Z, Hu S. Multiscale Statistical Analysis of Massive Corrosion Pits Based on Image Recognition of High Resolution and Large Field-of-View Images. Materials. 2020; 13(21):4695. https://doi.org/10.3390/ma13214695
Chicago/Turabian StyleWang, Yafei, Zhiqiang Tian, and Songyan Hu. 2020. "Multiscale Statistical Analysis of Massive Corrosion Pits Based on Image Recognition of High Resolution and Large Field-of-View Images" Materials 13, no. 21: 4695. https://doi.org/10.3390/ma13214695
APA StyleWang, Y., Tian, Z., & Hu, S. (2020). Multiscale Statistical Analysis of Massive Corrosion Pits Based on Image Recognition of High Resolution and Large Field-of-View Images. Materials, 13(21), 4695. https://doi.org/10.3390/ma13214695