
Power Control Strategies of On-Road Charging for Electric Vehicles



Abstract
:1. Introduction
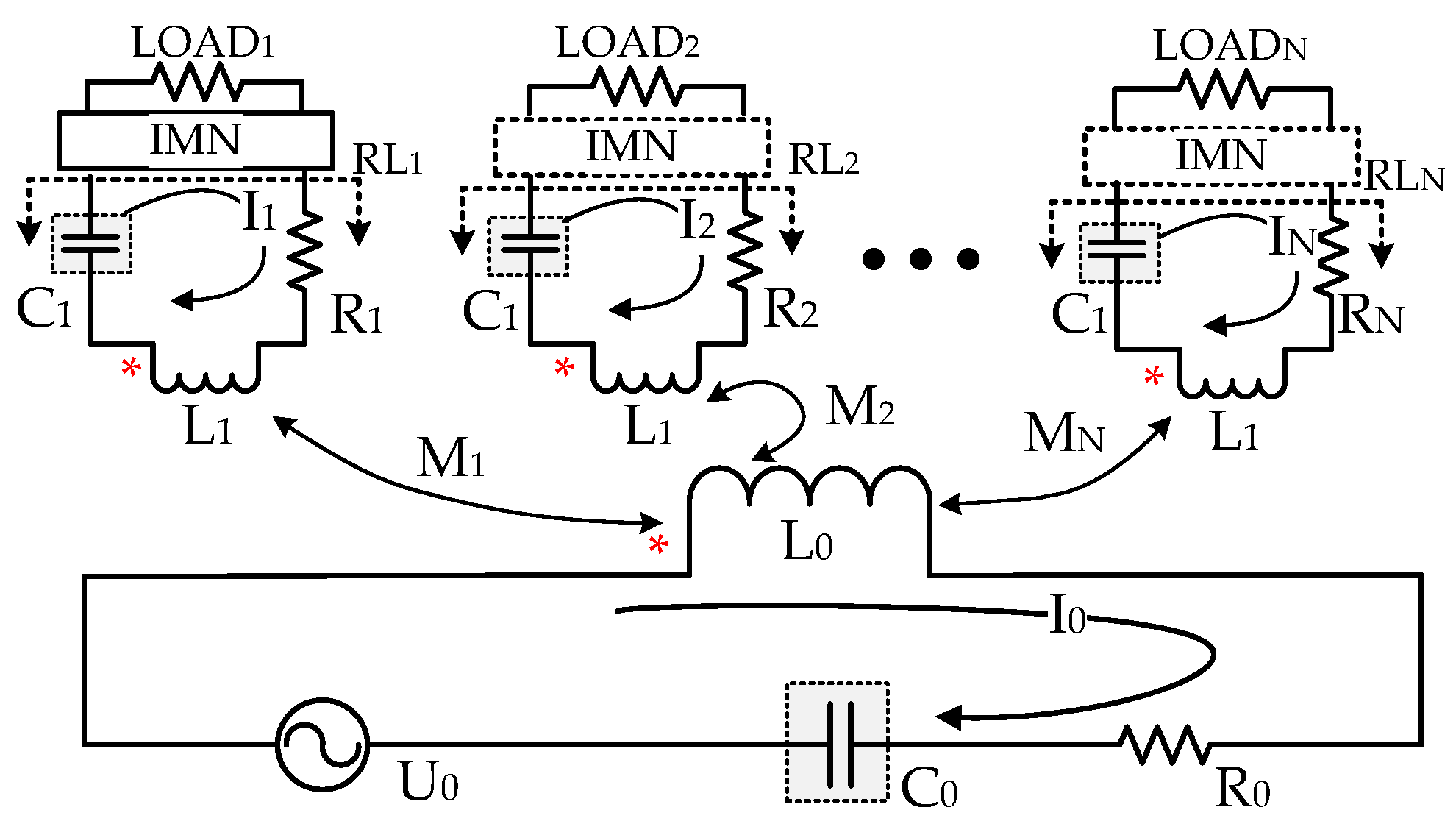
2. Fundamental Analysis
3. Power control Strategy and Simulation Analysis
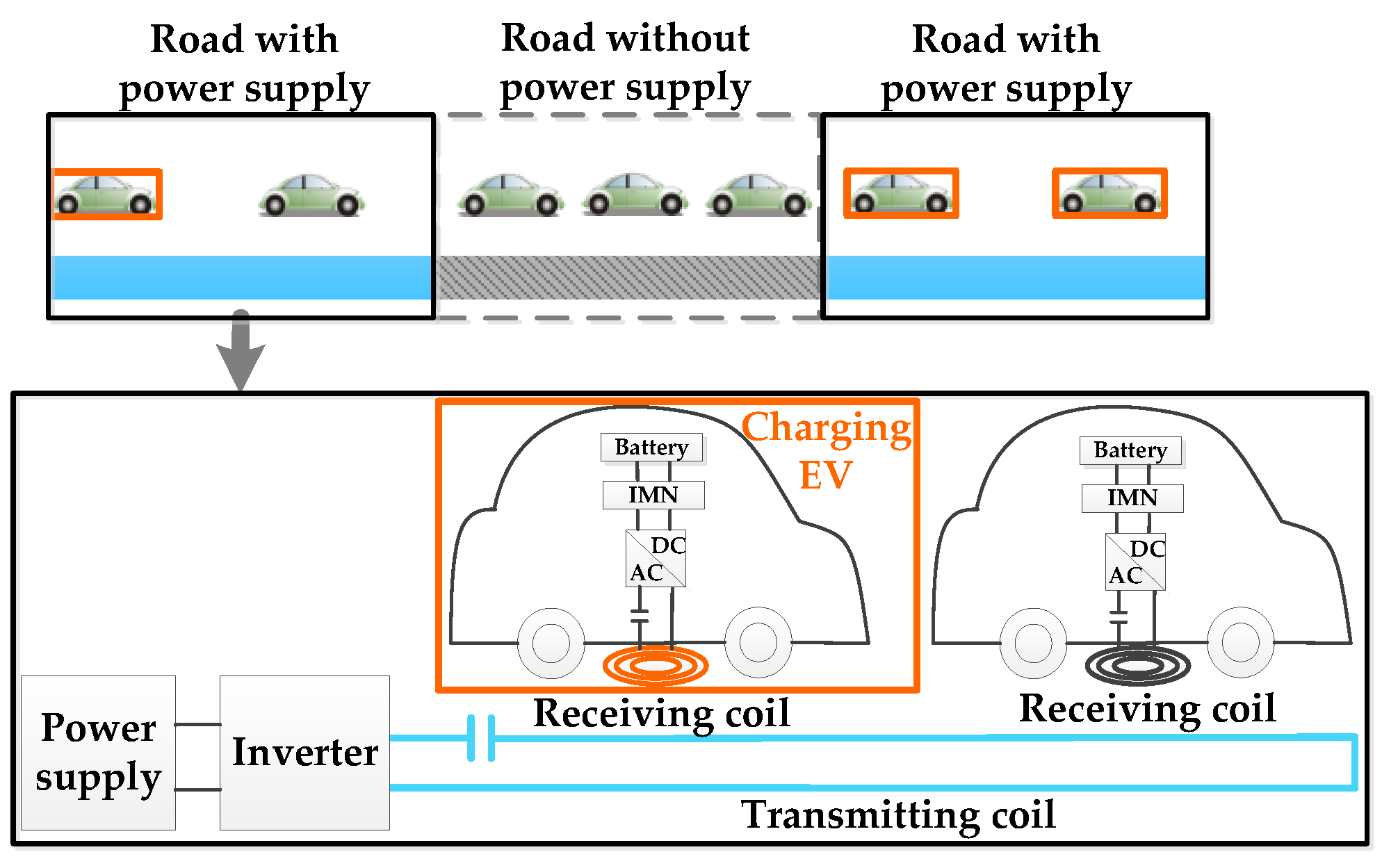
3.1. System Design Considering Practical Applications
3.2. Power Control Strategy
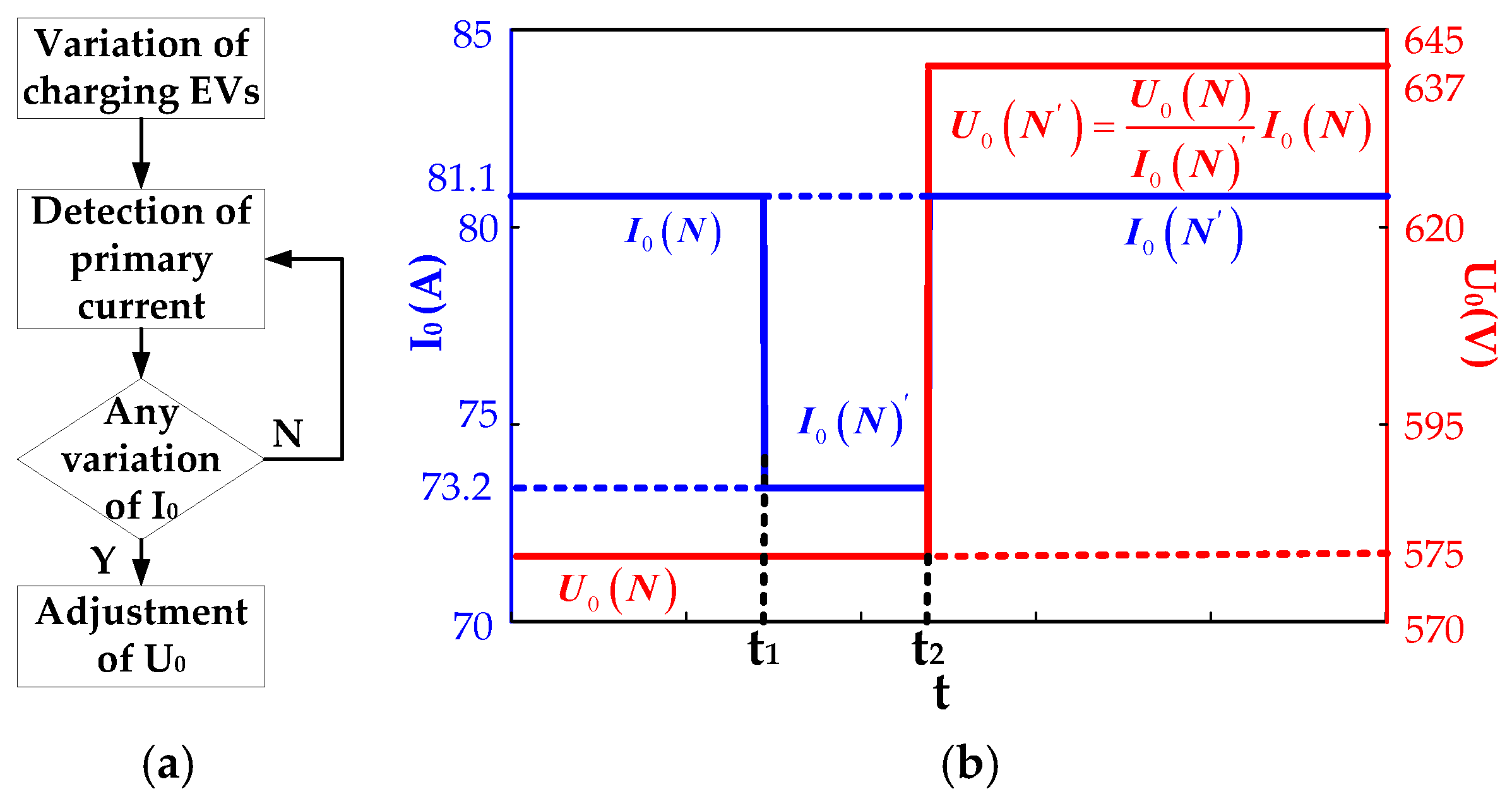
3.2.1. Strategy with Self-Adaptive Source Voltage
3.2.2. Strategy with Constant Source Voltage
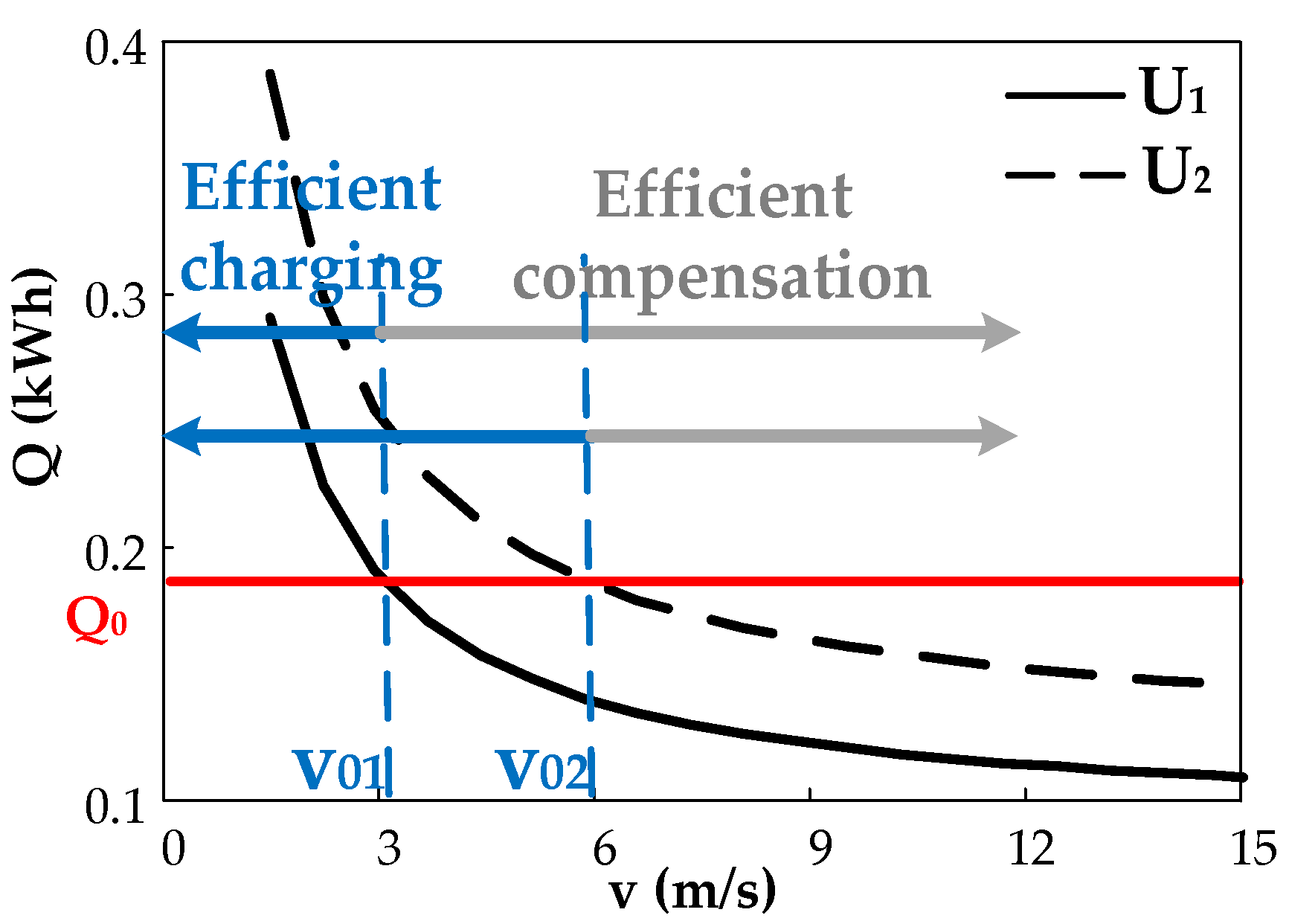
3.2.3. Particular Power Demand
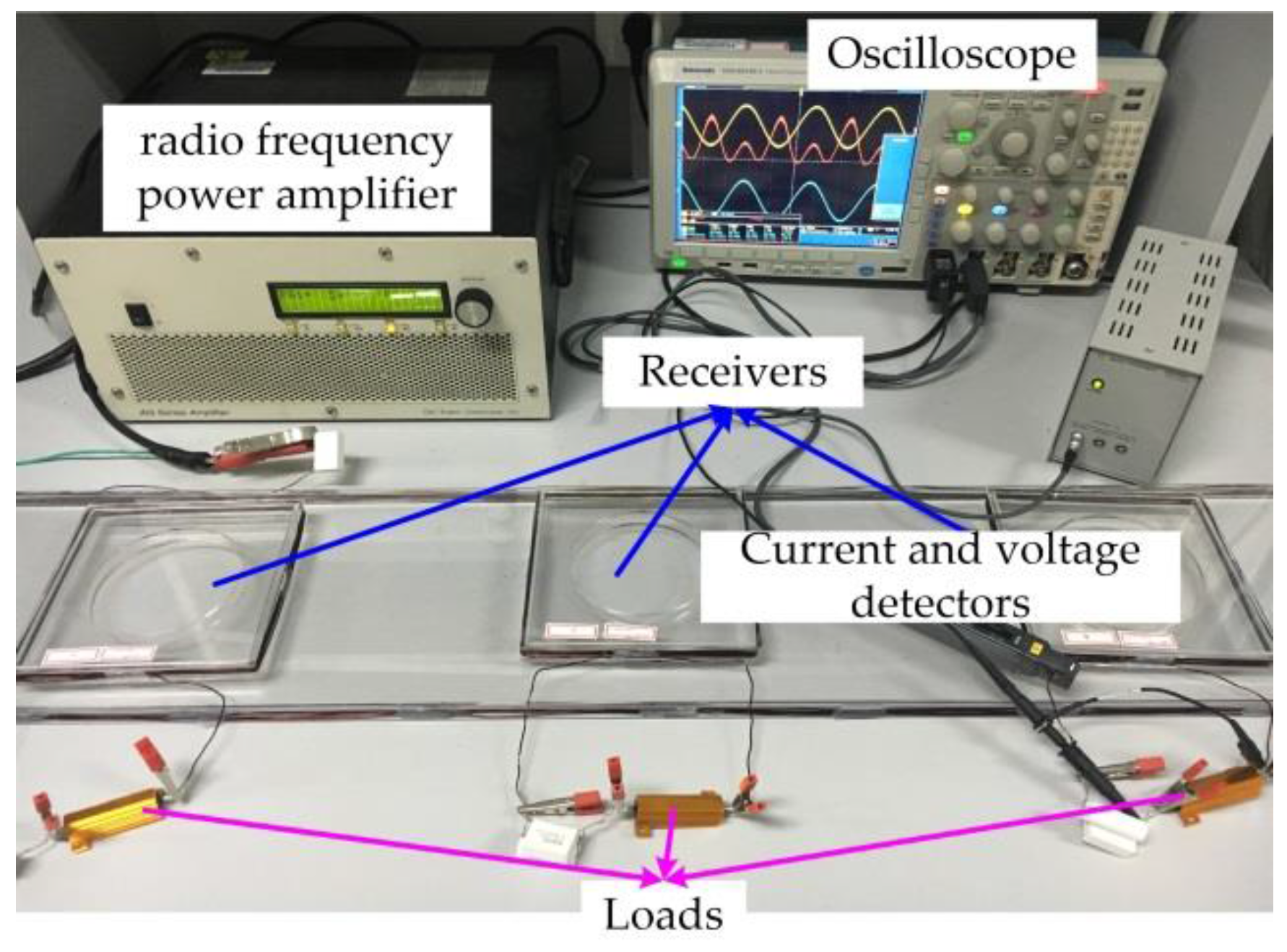
4. Experimental Verifications
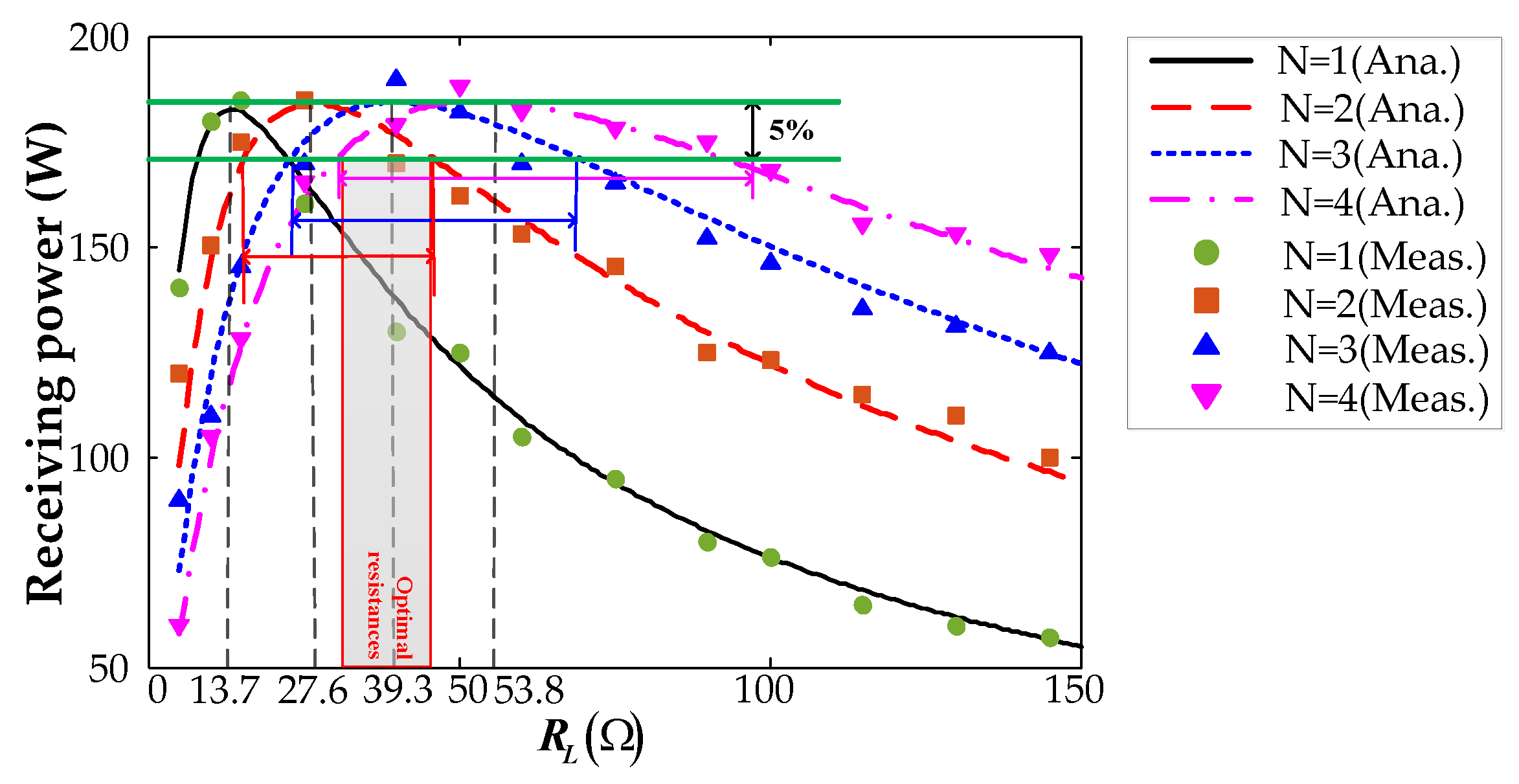
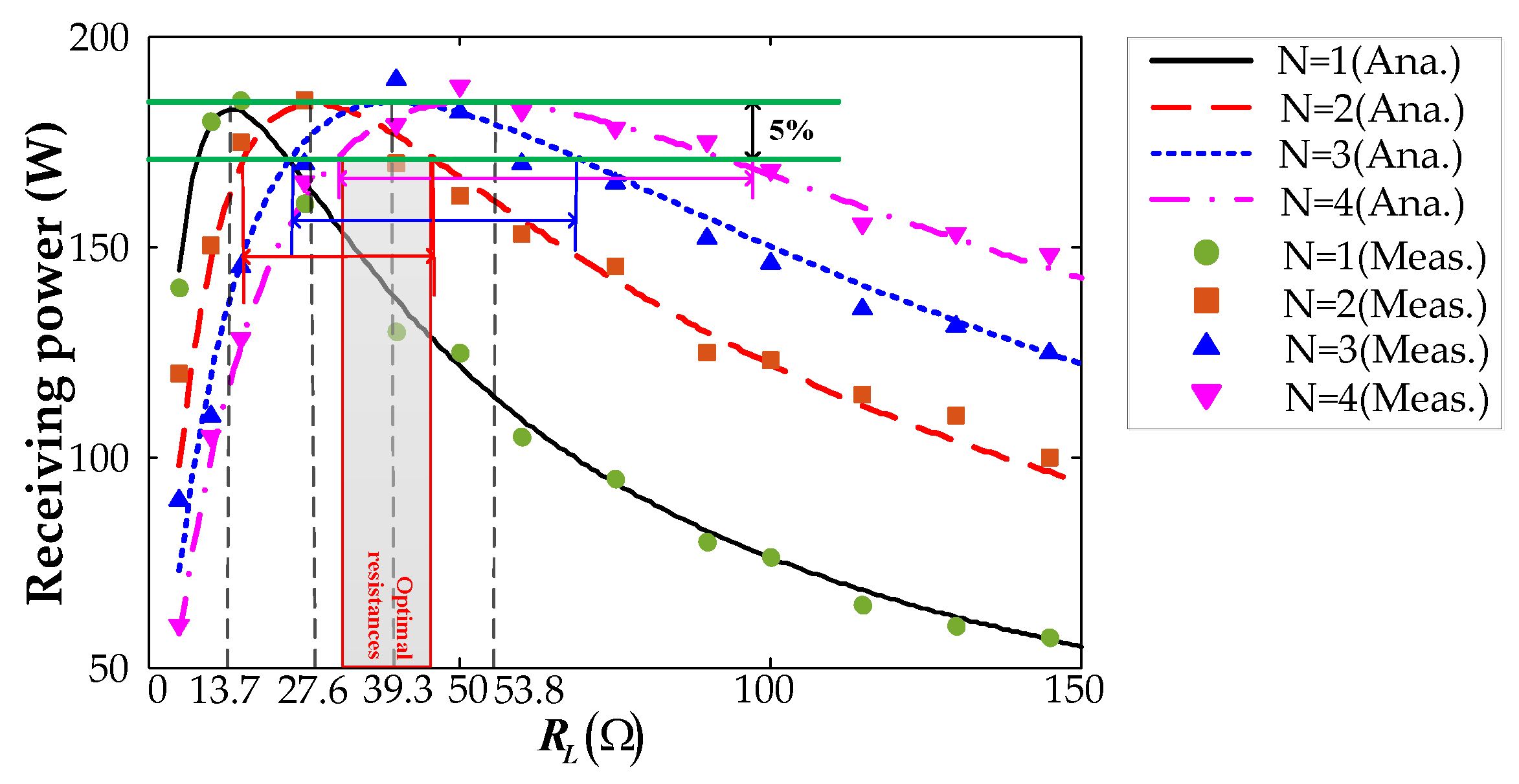
4.1. Output Power Optimization
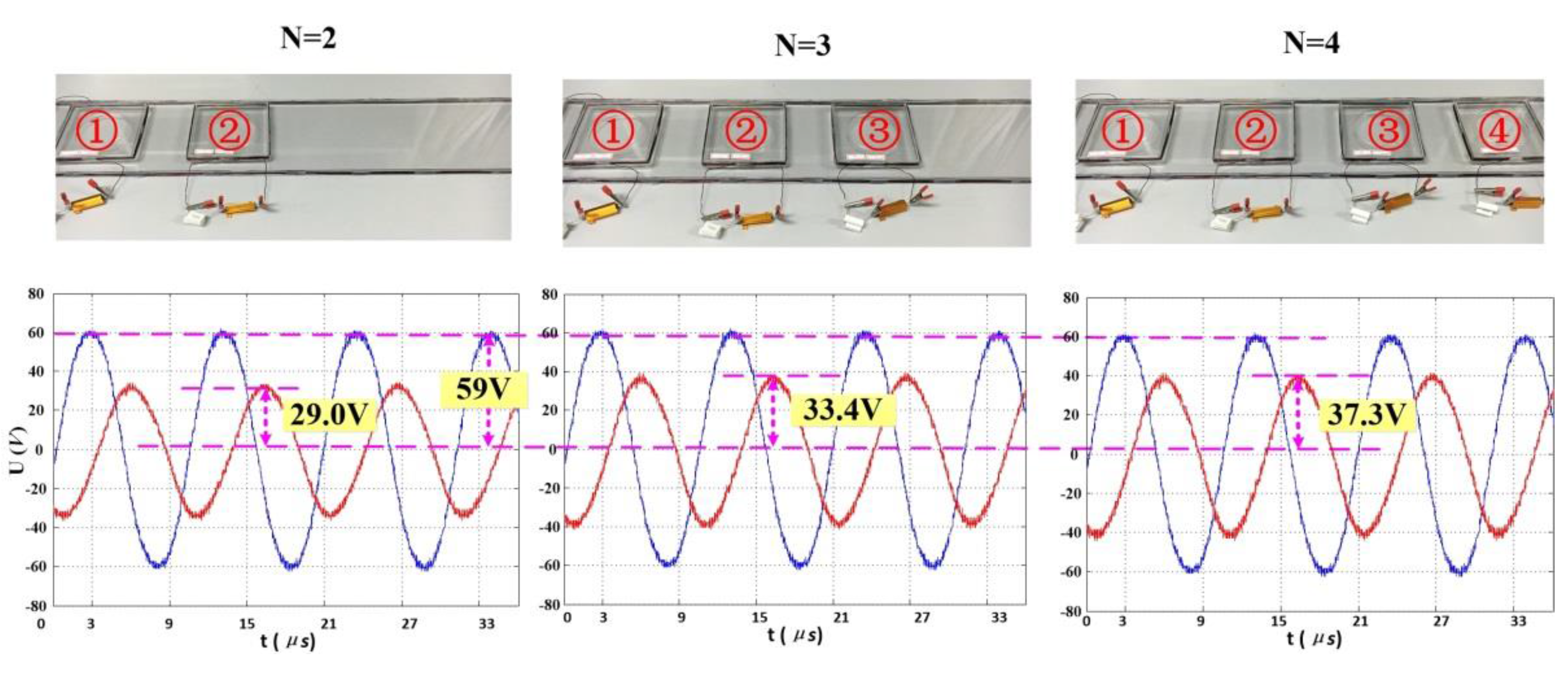
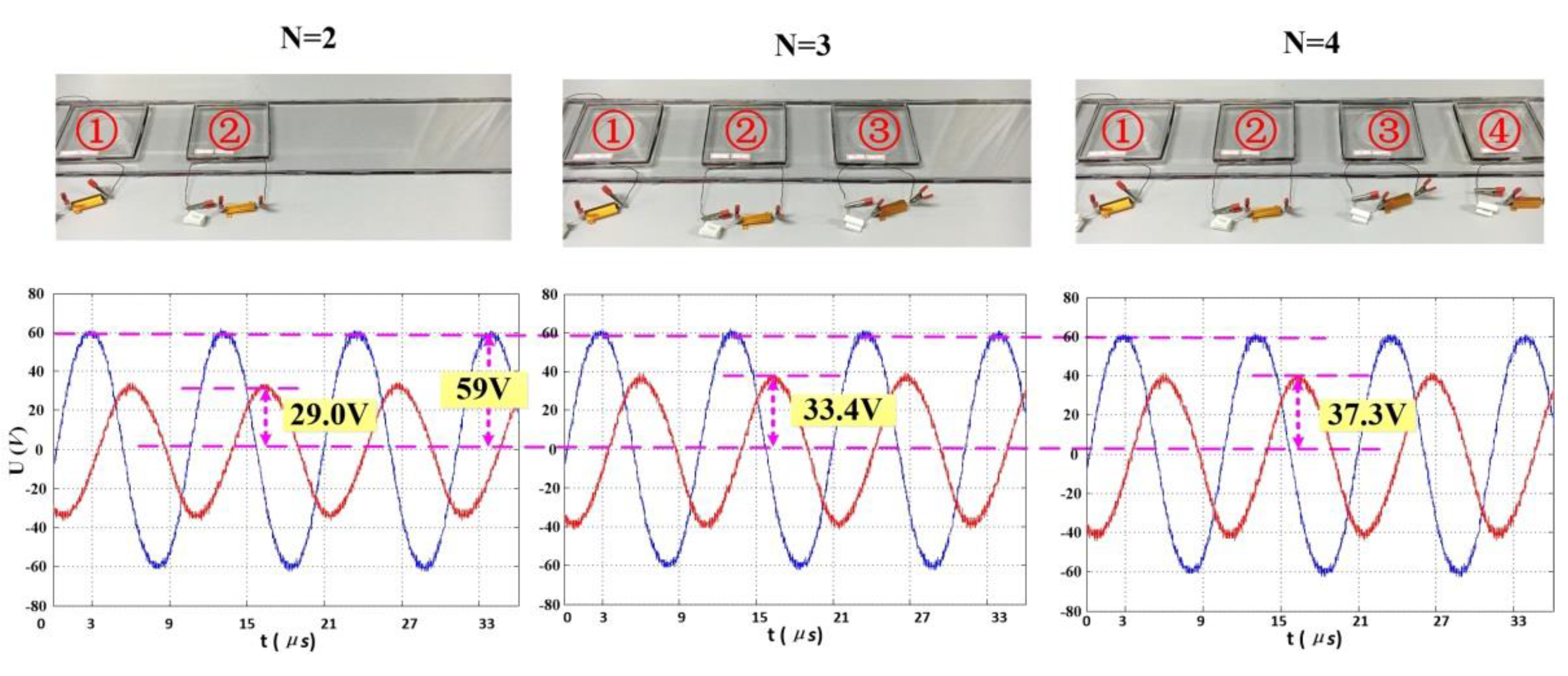
4.2. Receiving Power Control with Self-Adaptive Source Voltage
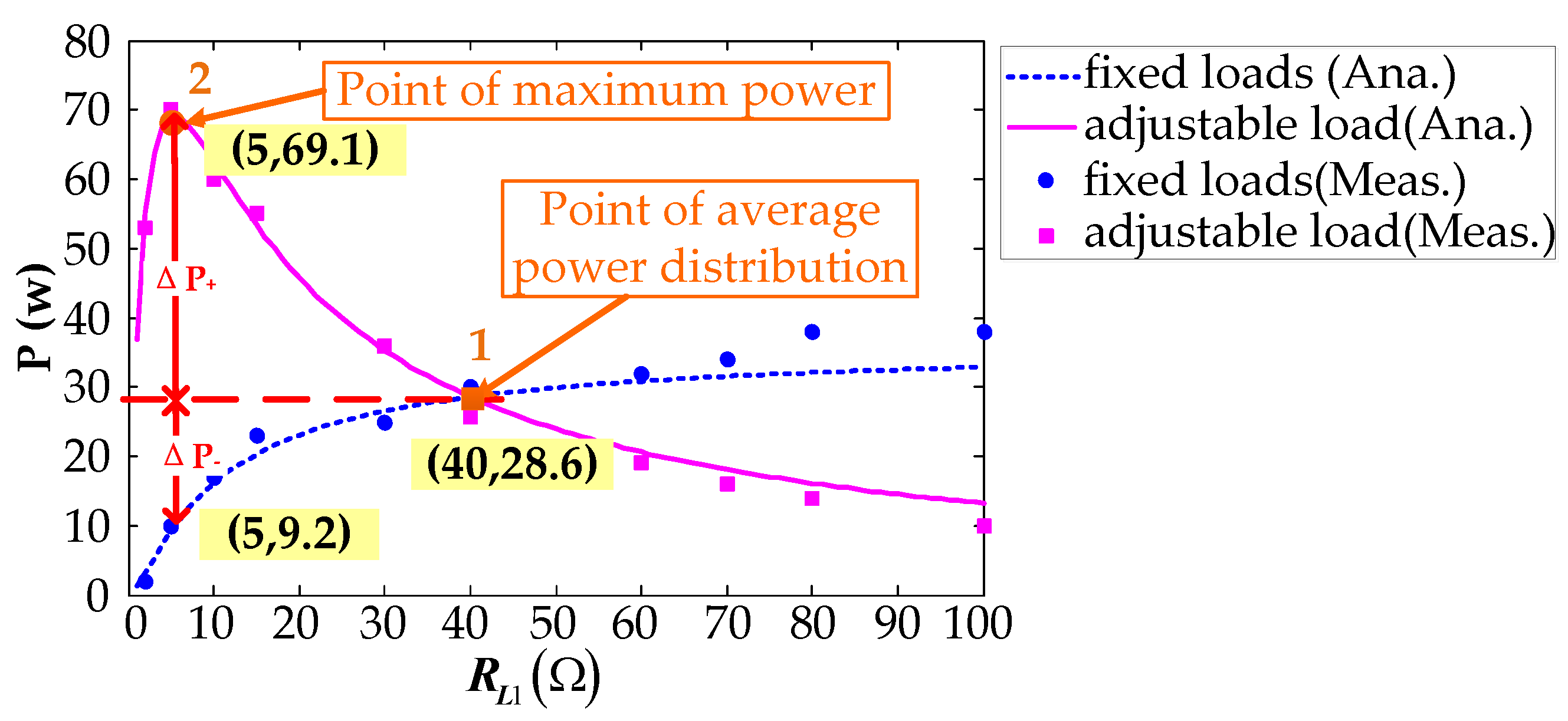
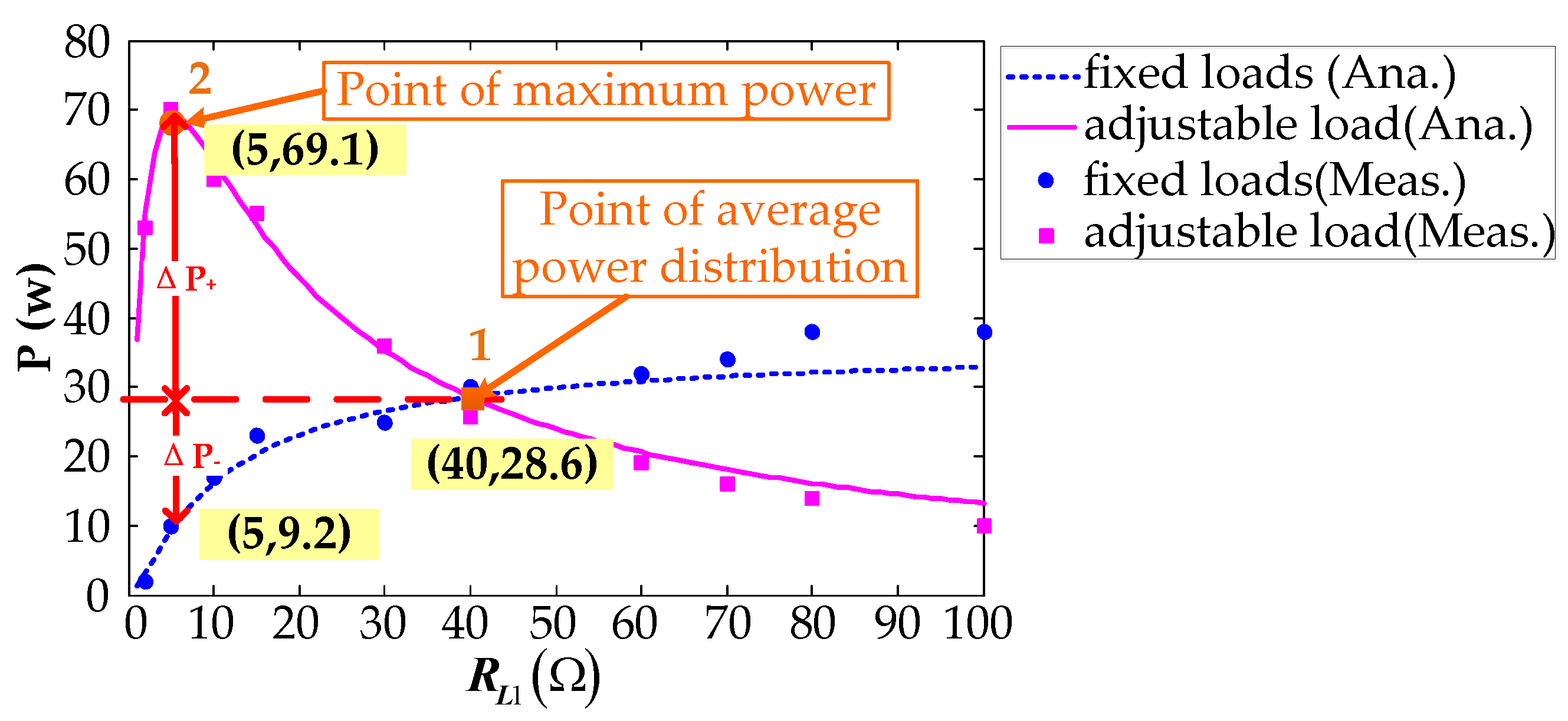
4.3. Receiving Power Control with Adjustment of Load Resistance
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Choi, S.Y.; Gu, B.W.; Jeong, S.Y.; Rim, C.T. Advances in Wireless Power Transfer Systems for Roadway-Powered Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 18–36. [Google Scholar] [CrossRef]
- Onar, O.C.; Miller, J.M.; Campbell, S.L.; Coomer, C.; White, C.P.; Seiber, L.E. A novel wireless power transfer for in-motion EV/PHEV charging. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013.
- Covic, G.A.; Boys, J.T. Modern Trends in Inductive Power Transfer for Transportation Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 28–41. [Google Scholar] [CrossRef]
- Chen, Z.; Jing, W.W.; Huang, X.L.; Tan, L.L.; Chen, C.; Wang, W. A Promoted Design for Primary Coil in Roadway-Powered System. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Li, S.; Mi, C.C. Wireless Power Transfer for Electric Vehicle Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Miller, J.M.; Jones, P.T.; Li, J.; Onar, O.C. ORNL Experience and Challenges Facing Dynamic Wireless Power Charging of EV’s. IEEE Circuits Syst. Mag. 2015, 15, 40–53. [Google Scholar] [CrossRef]
- Chopra, S.; Bauer, P. Driving Range Extension of EV with On-Road Contactless Power Transfer—A Case Study. IEEE Trans. Ind. Electron. 2013, 60, 329–338. [Google Scholar] [CrossRef]
- Nagendra, G.R.; Covic, G.A.; Boys, J.T. Determining the Physical Size of Inductive Couplers for IPT EV Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 571–583. [Google Scholar] [CrossRef]
- Bosshard, R.; Kolar, J.W.; Muhlethaler, J.; Stevanovic, I.; Wunsch, B.; Canales, F. Modeling and η-α-Pareto Optimization of Inductive Power Transfer Coils for Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 50–64. [Google Scholar] [CrossRef]
- Tan, L.L.; Huang, X.L.; Zhao, J.F.; Zhao, J.M.; Wang, W.; Zhou, Y.L. Optimization Design for Disc Resonators of a Wireless Power Transmission System. Trans. China Electrotech. Soc. 2013, 28, 1–6. [Google Scholar]
- Li, W.H.; Zhao, H.; Li, S.Q.; Deng, J.J.; Kan, T.Z.; Mi, C.C. Integrated LCC Compensation Topology for Wireless Charger in Electric and Plug-in Electric Vehicles. IEEE Trans. Ind. Electron. 2015, 62, 4215–4225. [Google Scholar] [CrossRef]
- Zhu, Q.W.; Wang, L.F.; Liao, C.L. Compensate Capacitor Optimization for Kilowatt-Level Magnetically Resonant Wireless Charging System. IEEE Trans. Ind. Electron. 2014, 61, 6758–6768. [Google Scholar] [CrossRef]
- Li, S.Q.; Li, W.H.; Deng, J.J.; Nguyen, T.D.; Mi, C.C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Tech. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Hao, H.; Covic, G.A.; Boys, J.T. An Approximate Dynamic Model of LCL-T-Based Inductive Power Transfer Power Supplies. IEEE Trans. Power Electron. 2014, 29, 5554–5567. [Google Scholar] [CrossRef]
- Wu, H.H.; Gilchrist, A.; Sealy, K.D.; Bronson, D. A High Efficiency 5 kW Inductive Charger for EVs Using Dual Side Control. IEEE Trans. Ind. Inform. 2012, 8, 585–595. [Google Scholar] [CrossRef]
- Madawala, U.K.; Neath, M.; Thrimawithana, D.J. A Power–Frequency Controller for Bidirectional Inductive Power Transfer Systems. IEEE Trans. Ind. Electron. 2013, 60, 310–317. [Google Scholar] [CrossRef]
- Gao, Y.; Farley, K.B.; Tse, Z.T.H. A uniform voltage gain control for alignment robustness in wireless EV charging. Energies 2015, 8, 8355–8370. [Google Scholar] [CrossRef]
- Nagendra, G.R.; Chen, L.; Covic, G.A.; Boys, J.T. Detection of EVs on IPT Highways. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 584–597. [Google Scholar] [CrossRef]
- Kim, J.; Kim, D.; Park, Y. Analysis of Capacitive Impedance Matching Networks for Simultaneous Wireless Power Transfer to Multiple Devices. IEEE Trans. Ind. Electron. 2014, 62, 2807–2813. [Google Scholar] [CrossRef]
- Kurs, A.; Moffatt, R.; Soljacic, M. Simultaneous mid-range power transfer to multiple devices. Appl. phys. Lett. 2010, 96, 044102. [Google Scholar] [CrossRef]
- Zhang, Y.M.; Lu, T.; Zhao, Z.M.; Chen, K.N.; He, F.B.; Yuan, L.Q. Wireless Power Transfer to Multiple Loads Over Various Distances Using Relay Resonators. IEEE Microw. Wirel. Compon. Lett. 2015, 25, 337–339. [Google Scholar] [CrossRef]
- Lee, K.; Cho, D. Analysis of Wireless Power Transfer for Adjustable Power Distribution among Multiple Receivers. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 950–953. [Google Scholar] [CrossRef]
- Hui, S.Y.R. Magnetic Resonance for Wireless Power Transfer [A Look Back]. IEEE Power Electron. Mag. 2016, 3, 14–31. [Google Scholar] [CrossRef]
- Chen, C.J.; Chu, T.H.; Lin, C.L.; Jou, Z.C. A Study of Loosely Coupled Coils for Wireless Power Transfer. IEEE Trans. Circuits Syst. II: Express Briefs 2010, 57, 536–540. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Ma, C.; Zhu, X. Efficiency and Optimal Loads Analysis for Multiple-Receiver Wireless Power Transfer Systems. IEEE Trans. Microw. Theory Tech. 2015, 63, 801–812. [Google Scholar] [CrossRef]
- Pantic, Z.; Lukic, S.M. Framework and Topology for Active Tuning of Parallel Compensated Receivers in Power Transfer Systems. IEEE Trans. Power Electron. 2012, 27, 4503–4513. [Google Scholar] [CrossRef]
- Kusaka, K.; Itoh, J. Experimental verification and analysis of AC-DC converter with an input impedance matching for wireless power transfer systems. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013.
- Lim, Y.; Tang, H.; Lim, S.; Park, J. An Adaptive Impedance-Matching Network Based on a Novel Capacitor Matrix for Wireless Power Transfer. IEEE Trans. Power Electron. 2013, 29, 4403–4413. [Google Scholar] [CrossRef]
- Duong, T.P.; Lee, J. A dynamically adaptable impedance-matching system for midrange wireless power transfer with misalignment. Energies 2015, 8, 7593–7617. [Google Scholar] [CrossRef]
- Prasanth, V.; Bauer, P. Study of misalignment for On Road Charging. In Proceedings of the 2013 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 16–19 June 2013.
- Zhang, W.; Wong, S.; Tse, C.K.; Chen, Q.H. A study of sectional tracks in roadway inductive power transfer system. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011.
- Byd Electric Vehicles, Photovoltaic, LED Lighting, Energy Storage. Available online: http://bydauto.com/ (accessed on 10 June 2016).
- Budhia, M.; Covic, G.A.; Boys, J.T. Design and Optimization of Circular Magnetic Structures for Lumped Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2011, 26, 3096–3108. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Source voltage | 100V ~ 700V |
| Working frequency | 85 kHz |
| Wire radius | 5.89 mm |
| Size of transmitter | 160 m × 1.2 m |
| Inductance of transmitter | 14.5 mH |
| Size of receiver | 1 m × 1 m |
| Inductance of receiver | 153 μH |
| Parameters | Value |
|---|---|
| Working frequency | 85 kHz |
| Size of transmitter | 1 m × 0.2 m |
| Inductance of transmitter | 74.8 μH |
| Compensated capacitor of transmitter | 47 nF |
| Size of receiver | 0.2 m × 0.2 m |
| Inductance of receiver | 21.4 μH |
| Compensated capacitor of receiver | 168 nF |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, L.; Guo, J.; Huang, X.; Liu, H.; Yan, C.; Wang, W. Power Control Strategies of On-Road Charging for Electric Vehicles. Energies 2016, 9, 531. https://doi.org/10.3390/en9070531
Tan L, Guo J, Huang X, Liu H, Yan C, Wang W. Power Control Strategies of On-Road Charging for Electric Vehicles. Energies. 2016; 9(7):531. https://doi.org/10.3390/en9070531
Chicago/Turabian StyleTan, Linlin, Jinpeng Guo, Xueliang Huang, Han Liu, Changxin Yan, and Wei Wang. 2016. "Power Control Strategies of On-Road Charging for Electric Vehicles" Energies 9, no. 7: 531. https://doi.org/10.3390/en9070531
APA StyleTan, L., Guo, J., Huang, X., Liu, H., Yan, C., & Wang, W. (2016). Power Control Strategies of On-Road Charging for Electric Vehicles. Energies, 9(7), 531. https://doi.org/10.3390/en9070531