
Optimal Day-Ahead Scheduling of a Smart Distribution Grid Considering Reactive Power Capability of Distributed Generation

Abstract
:1. Introduction
2. Reactive Power Capabilities of Different DG Systems
2.1. Wind System
2.2. PV System
2.3. Diesel Generator
3. The Proposed Scheduling Framework
3.1. Objection Function
3.1.1. Operation Cost F1(x, u)
3.1.2. Emission Cost F2(x, u)
3.1.3. Network Loss Cost F3(x, u)
3.2. Constraints
3.2.1. Load Flow Equations Constraint
3.2.2. Purchasing Power Constraint
3.2.3. WTs and PVs Limits
3.2.4. DG Generations Limits
3.2.5. RL Constraints
3.2.6. Steady-State Security Constraints
4. Optimization Technique
4.1. Original Differential Evolution Algorithm
4.2. Modified Differential Evolution Algorithm
4.2.1. Self-Learning Parameters Strategy
4.2.2. Boundary Handling
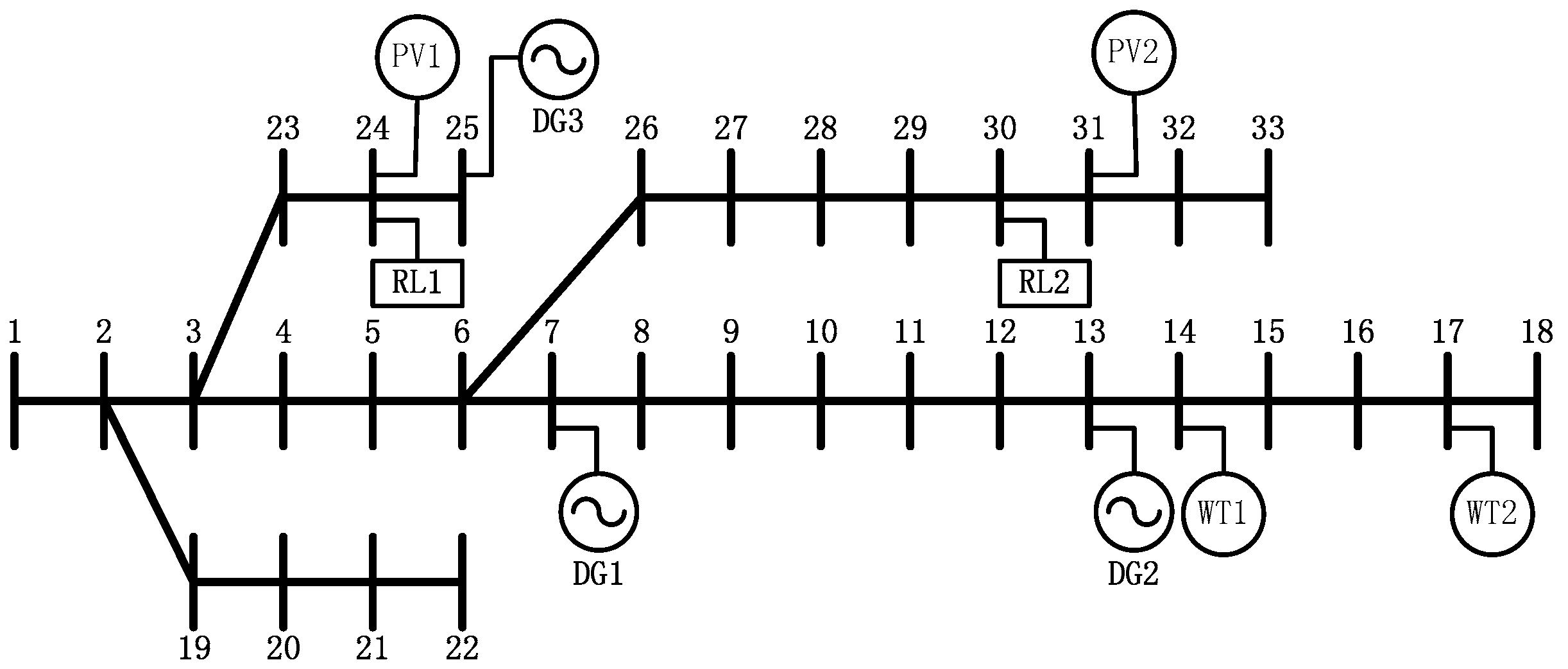
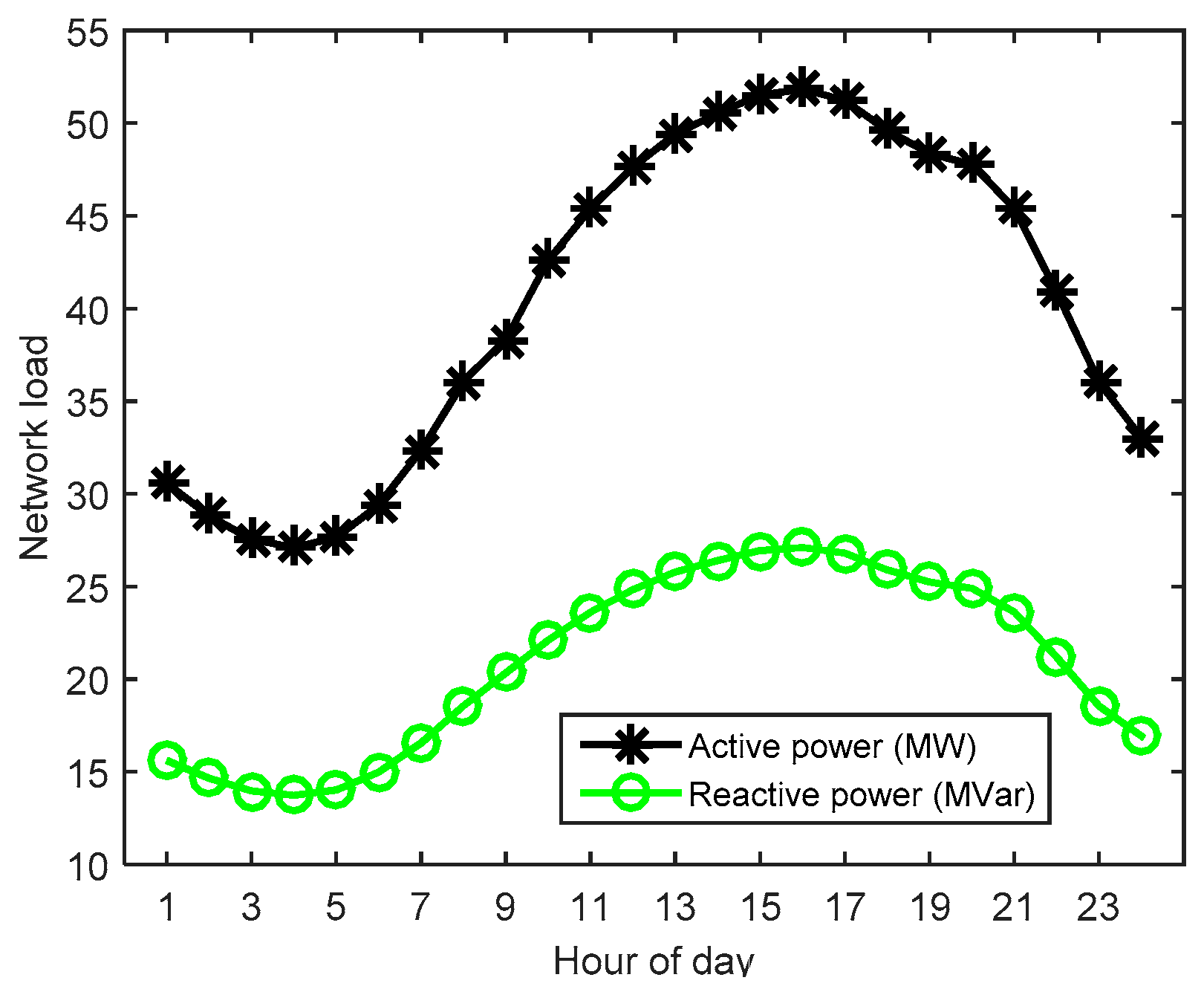
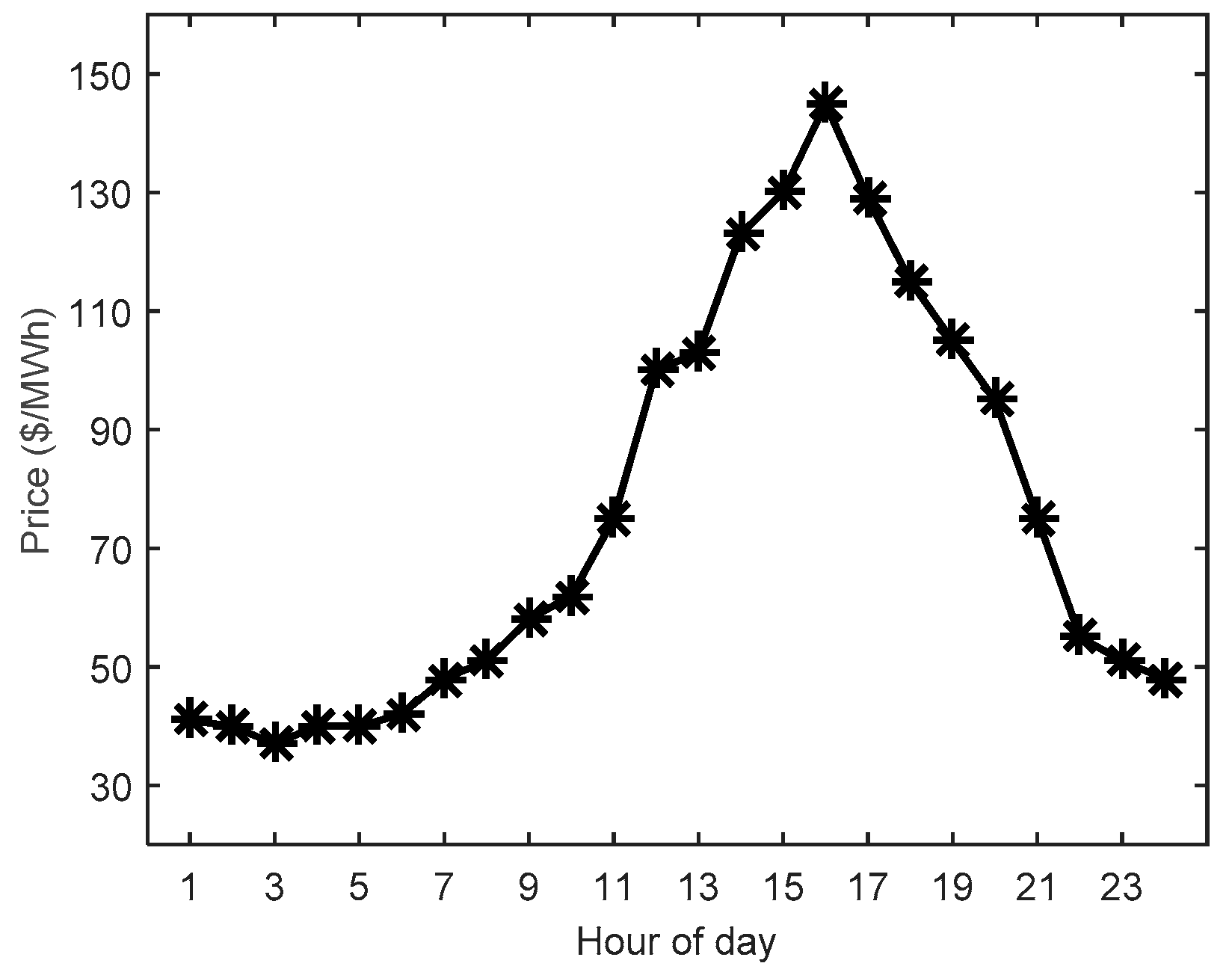
5. Case Studies
5.1. Considering the Reactive Power Support Capabilities of WTs and PVs
- Case 1: the operation cost is considered as the objective function;
- Case 2: the emission cost is considered as the objective function;
- Case 3: the network loss cost is considered as the objective function; and
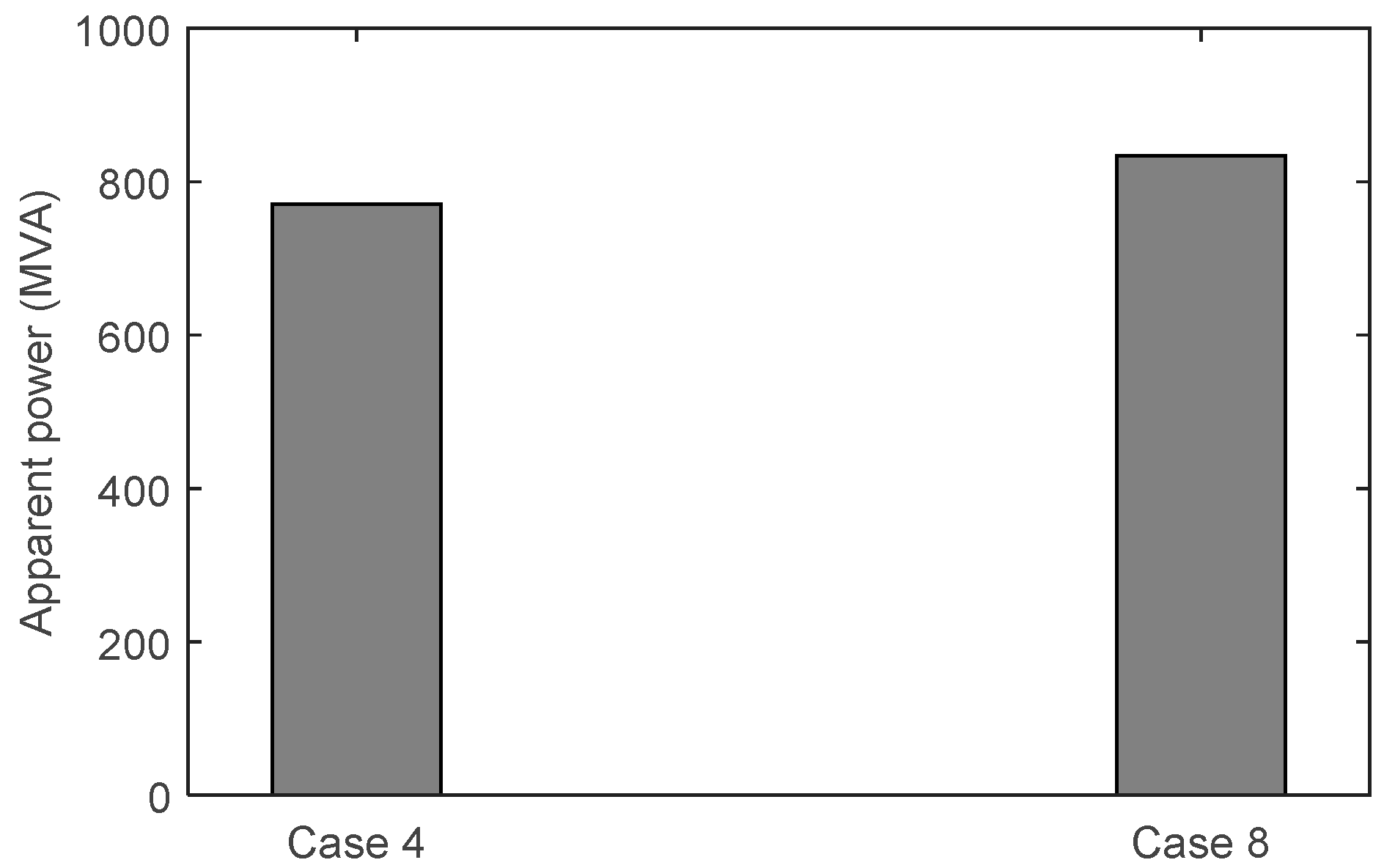
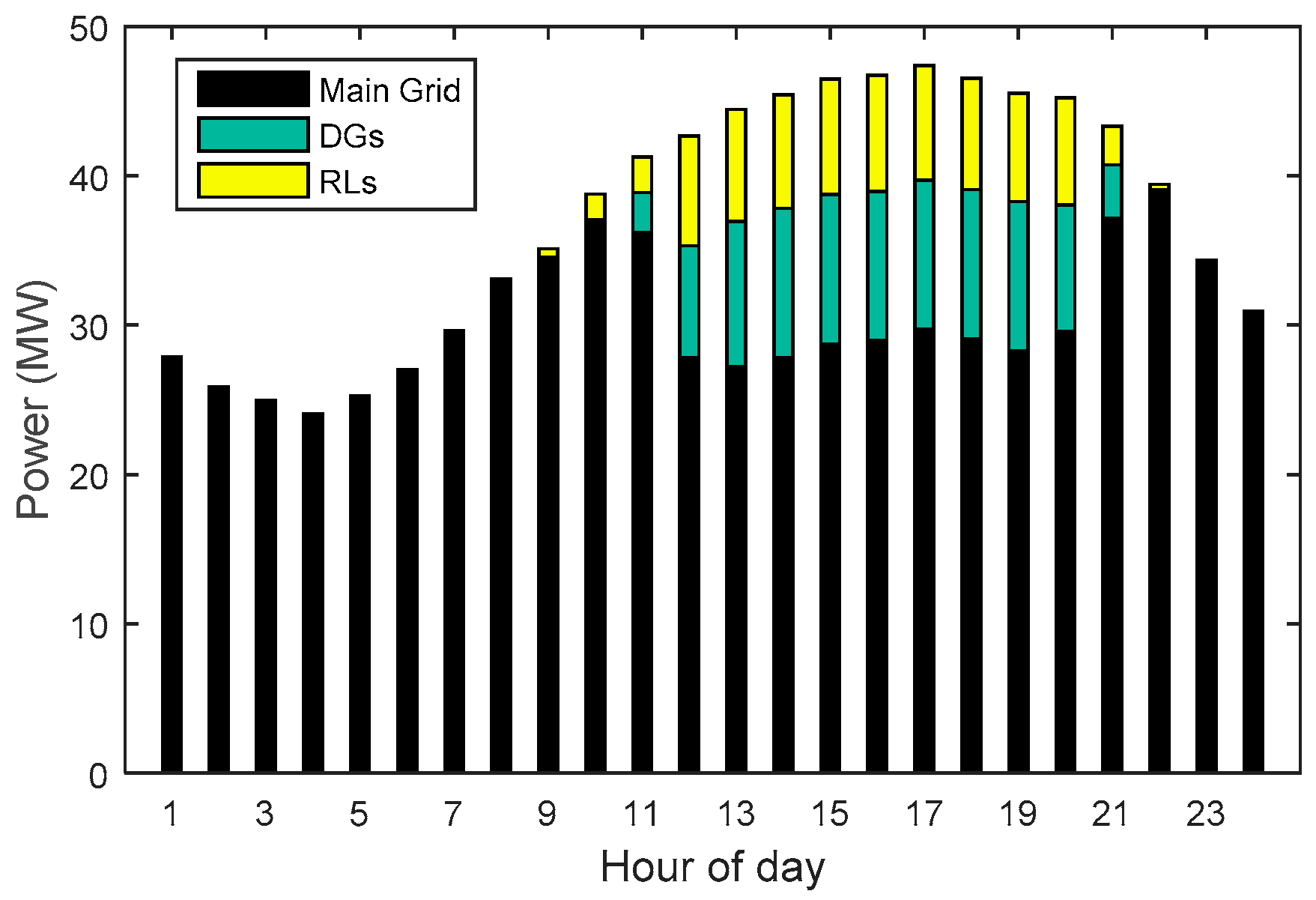
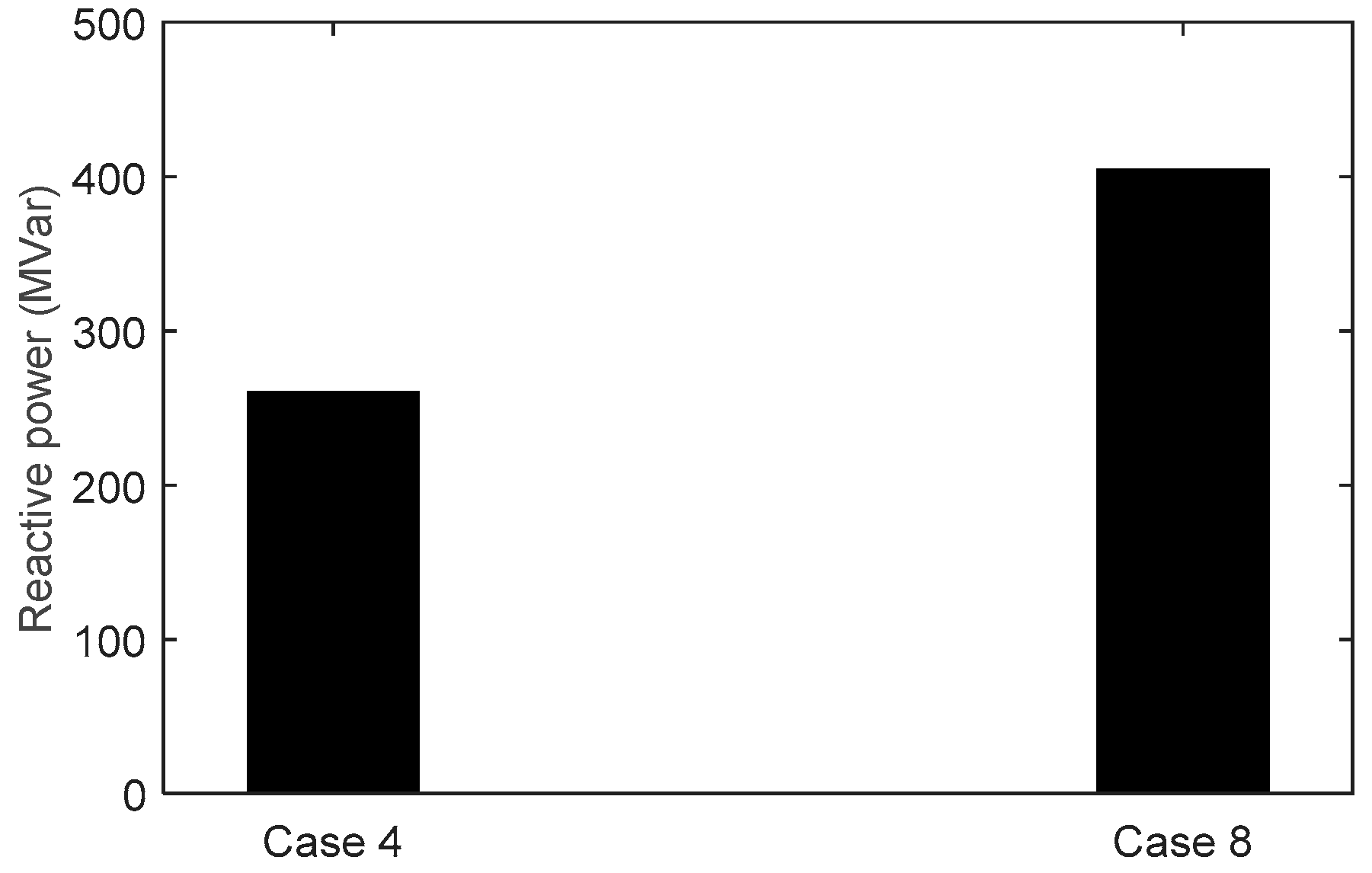
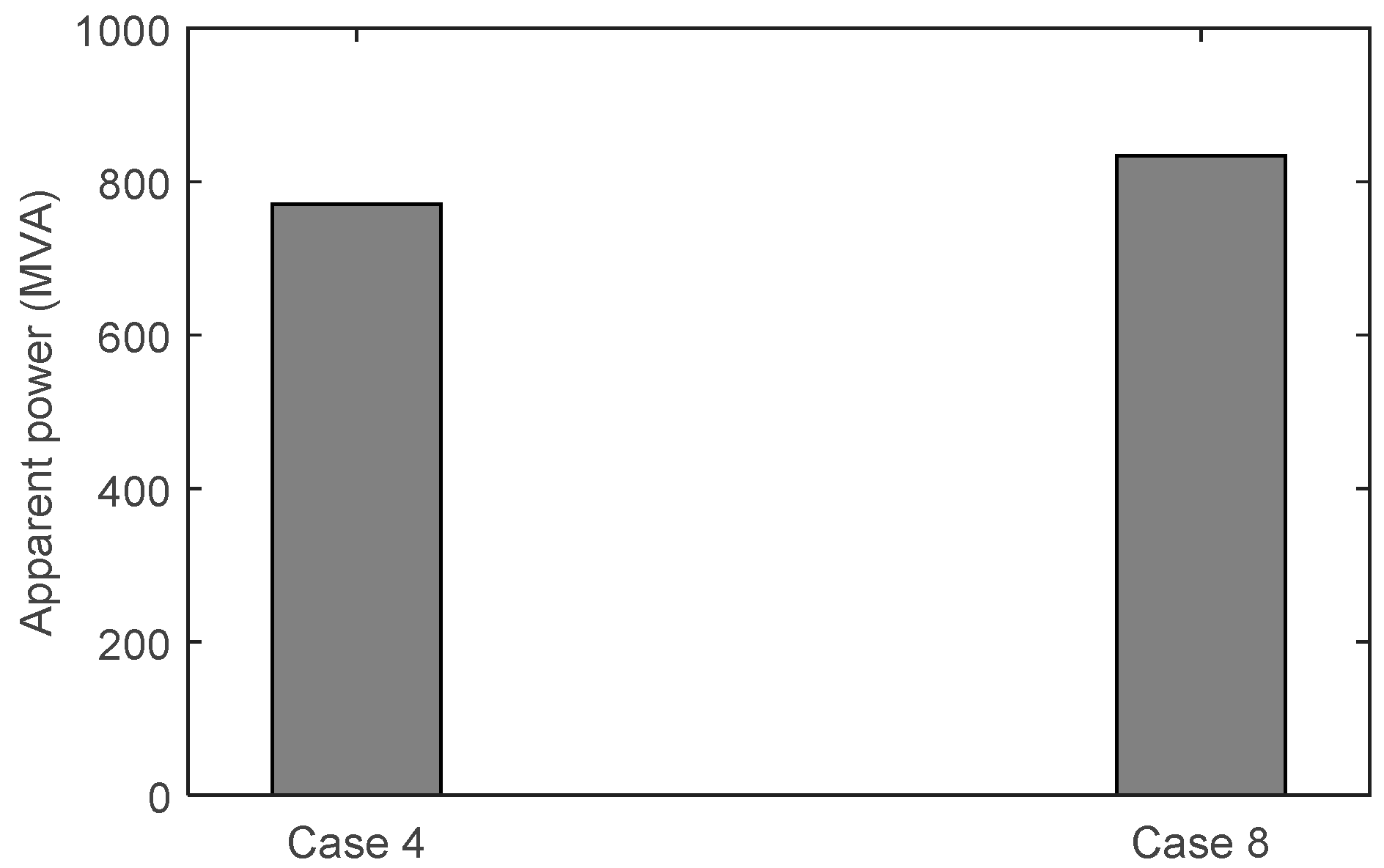
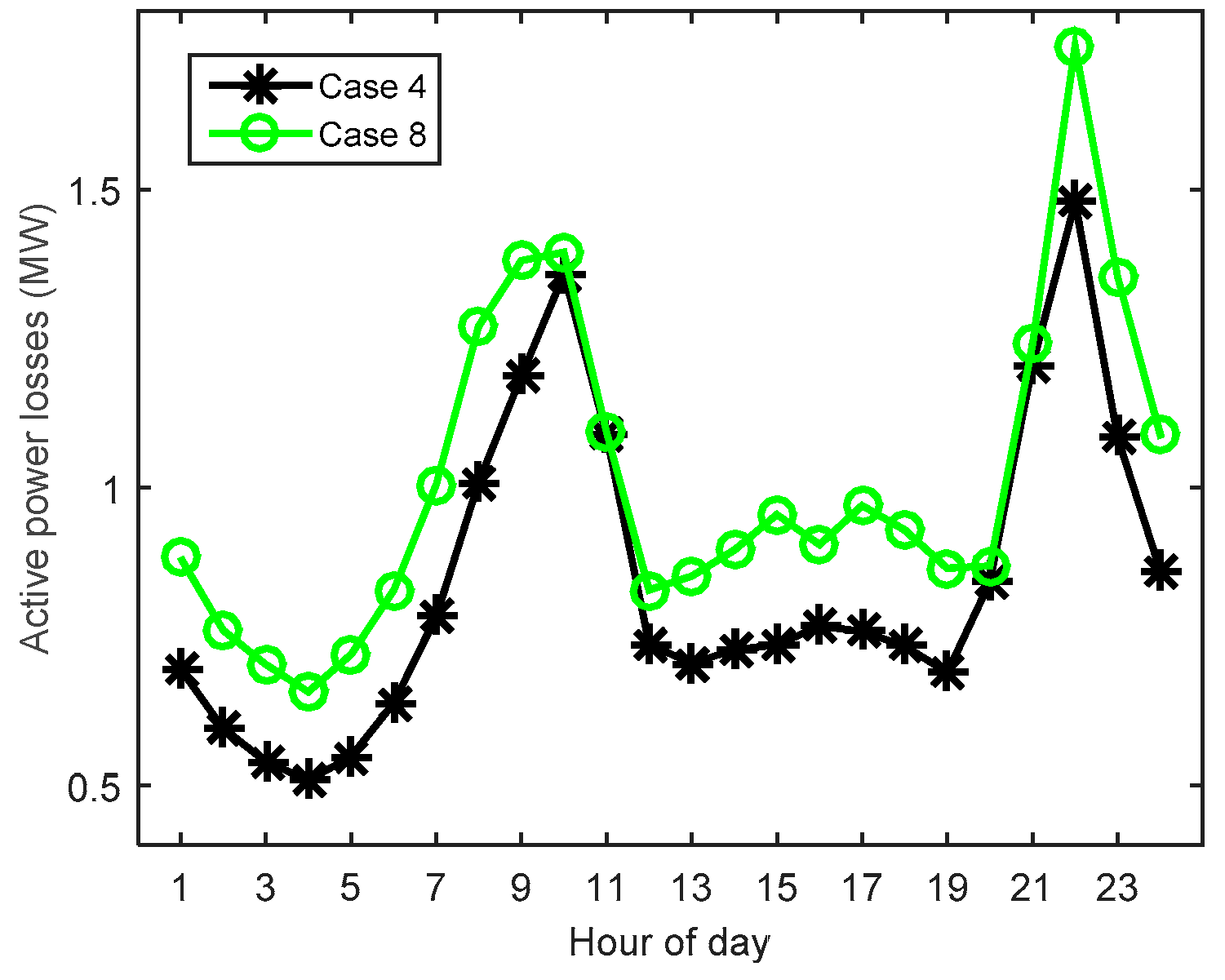
- Case 4: the composite cost including operation cost, emission cost, and network loss cost is considered as the objective function.
5.2. Non-Considering The Reactive Power Support Capabilities of WTs and PVs
- Case 5: the operation cost is considered as the objective function where WTs and PVs are evoked only to output active power.
- Case 6: the emission cost is considered as the objective function where WTs and PVs are evoked only to output active power.
- Case 7: the network loss cost is considered as the objective function where WTs and PVs are evoked only to output active power.
- Case 8: the composite cost is considered as the objective function where WTs and PVs are evoked only to output active power.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ramachandran, B.; Srivastava, S.K.; Edrington, C.S.; Cartes, D.A. An intelligent auction scheme for smart grid market using a hybrid immune algorithm. IEEE Trans. Ind. Electron. 2011, 58, 4603–4612. [Google Scholar] [CrossRef]
- D’Adamo, C.; Jupe, S.; Abbey, C. Global survey on planning and operation of active distribution networks-Update of CIGRE C6.11 working group activities. In Proceedings of the 20th International Conference and Exhibition on Electricity Distribution (CIRED 2009), Prague, Czech Republic, 8–11 June 2009.
- Algarni, A.A.S.; Bhattacharya, K. Disco operation considering DG units and their goodness factors. IEEE Trans. Power Syst. 2009, 24, 1831–1840. [Google Scholar] [CrossRef]
- Pilo, F.; Pisano, G.; Soma, G.G. Optimal coordination of energy resources with a two-stage online active management. IEEE Trans. Ind. Electron. 2011, 58, 4526–4537. [Google Scholar] [CrossRef]
- Silva, M.; Morais, H.; Vale, Z. An integrated approach for distributed energy resource short-term scheduling in smart grids considering realistic power system simulation. Energy Convers. Manag. 2012, 64, 273–288. [Google Scholar] [CrossRef]
- Doostizadeh, M.; Ghasemi, H. Day-ahead scheduling of an active distribution network considering energy and reserve markets. Int. Trans. Elect. Energy Syst. 2013, 23, 930–945. [Google Scholar] [CrossRef]
- Sousa, T.; Morais, H.; Vale, Z.; Castro, R. A multi-objective optimization of the active and reactive resource scheduling at a distribution level in a smart grid context. Energy 2015, 85, 236–250. [Google Scholar] [CrossRef]
- Vahidinasab, V.; Jadid, S. Joint economic and emission dispatch in energy markets: A multiobjective mathematical programming approach. Energy 2010, 35, 1497–1504. [Google Scholar] [CrossRef]
- Engelhardt, S.; Erlich, I.; Feltes, C.; Kretschmann, J.; Shewarega, F. Reactive power capability of wind turbines based on doubly fed induction generators. IEEE Trans. Energy Convers. 2011, 26, 364–372. [Google Scholar] [CrossRef]
- Meegahapola, L.; Durairaj, S.; Flynn, D.; Fox, B. Coordinated utilisation of wind farm reactive power capability for system loss optimization. Eur. Trans. Electr. Power 2011, 21, 40–51. [Google Scholar] [CrossRef]
- Zou, K.; Agalgaonkar, A.P.; Muttaqi, K.M.; Perera, S. Distribution system planning with incorporating DG reactive capability and system uncertainties. IEEE Trans. Sustain. Energy 2012, 3, 112–123. [Google Scholar] [CrossRef]
- Rueda-Medina, A.C.; Padilha-Feltrin, A. Distributed generators as providers of reactive power support—A market approach. IEEE Trans. Power Syst. 2013, 28, 490–502. [Google Scholar] [CrossRef]
- El-Shimy, M. Modeling and analysis of reactive power in grid-connected onshore and offshore DFIG-based wind farms. Wind Energy 2014, 17, 279–295. [Google Scholar] [CrossRef]
- Delfino, F.; Denegri, G.B.; Invernizzi, M.; Procopio, R.; Ronda, G. A P-Q capability chart approach to characterize grid connect PV-units. In Proceedings of the Integration of Wide-Scale Renewable Resources into the Power Delivery System, 2009 CIGRE/IEEE PES Joint Symposium, Calgary, AB, Canada, 29–31 July 2009.
- Lof, P.A.; Andersson, G.; Hill, D.J. Voltage-dependent reactive power limits for voltage stability studies. IEEE Trans. Power Syst. 1995, 10, 220–228. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Noman, N.; Iba, H. Differential evolution for economic load dispatch problems. Electr. Power Syst. Res. 2008, 78, 1322–1331. [Google Scholar] [CrossRef]
- Abou El Ela, A.A.; Abido, M.A.; Spea, S.R. Differential evolution algorithm for optimal reactive power dispatch. Electr. Power Syst. Res. 2011, 81, 458–464. [Google Scholar] [CrossRef]
- Abaci, K.; Yamacli, V. Differential search algorithm for solving multi-objective optimal power flow problem. Int. J. Electr. Power Energy Syst. 2016, 79, 1–10. [Google Scholar] [CrossRef]
- Duwuru, N.; Swarup, K.S. A hybrid interior point assisted differential evolution algorithm for economic dispatch. IEEE Trans. Power Syst. 2011, 26, 541–549. [Google Scholar]
- Wong, S.; Bhattacharya, K.; Fuller, J.D. Electric power distribution system design and planning in a deregulated environment. IET Gener. Transm. Distrib. 2009, 3, 1061–1078. [Google Scholar] [CrossRef]
- Sousa, T.; Morais, H.; Vale, Z.; Faria, P.; Soares, J. Intelligent energy resource management considering vehicle-to-grid: A simulated annealing approach. IEEE Trans. Smart Grid 2012, 3, 535–542. [Google Scholar] [CrossRef]
- Ding, M.; Zhang, Y.Y.; Mao, M.Q.; Yang, W.; Liu, X.P. Steady model and operation optimization for microgrids under centralized control. Automat. Electron. Power Sys. 2009, 33, 78–82. [Google Scholar]
- Deng, W.; Li, X.R.; Liu, Z.Y.; Yan, Y.L.; Li, J.X.; Ma, Y.H. Comprehensive optimal allocation of intermittent distributed generation considering reactive power compensation. CSEE J. Power Energy Syst. 2012, 32, 80–88. [Google Scholar]
- Hassan, M.A.; Abido, M.A. Optimal design of microgrids in autonomous and grid-connected modes using particle swarm optimization. IEEE Trans. Power Electron. 2011, 26, 755–769. [Google Scholar] [CrossRef]
- Singh, S.P.; Rao, A.R. Optimal allocation of capacitors in distribution systems using particle swarm optimization. Int. J. Electr. Power Energy Syst. 2012, 43, 1267–1275. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Fuel Cost Function Coefficients | Technical Constraints | ||||||
|---|---|---|---|---|---|---|---|---|
| ai $/MW2 | bi $/MW | ci $ | SUDG,i $ | SDDG,i $ | MW | MW | RRi MW/min | |
| DG1 | 0.0045 | 79 | 27 | 15 | 10 | 0.75 | 3 | 0.025 |
| DG2 | 0.0045 | 87 | 25 | 15 | 10 | 0.75 | 3 | 0.025 |
| DG3 | 0.0035 | 81 | 26 | 15 | 10 | 1 | 4 | 0.03 |
| DG1 $/MW | DG2 $/MW | DG3 $/MW | WT1 & 2 $/MW | PV1 & 2 $/MW | |
|---|---|---|---|---|---|
| Maintenance cost coefficients | 7 | 8 | 9 | 6.8 | 3 |
| Emission Species | Emission Rate (Kg/MW) | Emission Fees $/Kg | |
|---|---|---|---|
| Thermal Power | DGs Power | ||
| CO2 | 889 | 649 | 0.019 |
| SO2 | 1.8 | 0.206 | 0.236 |
| NOx | 1.6 | 9.89 | 0.472 |
| Hour | Case 1 | Case 2 | Case 3 | Case 4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A ($) | B ($) | C ($) | A ($) | B ($) | C ($) | A ($) | B ($) | C ($) | A ($) | B ($) | C ($) | |
| 1 | 1,261.31 | 502.56 | 27.32 | 1,806.09 | 401.23 | 10.14 | 1,806.23 | 401.49 | 9.89 | 1,261.31 | 502.56 | 27.32 |
| 2 | 1,169.68 | 473.02 | 22.60 | 1,926.31 | 362.65 | 5.46 | 1,926.41 | 363.50 | 5.16 | 1,169.68 | 473.02 | 22.60 |
| 3 | 1,065.23 | 457.18 | 19.34 | 1,873.82 | 353.72 | 4.63 | 1,873.82 | 353.82 | 4.61 | 1,065.23 | 457.18 | 19.34 |
| 4 | 1,106.57 | 442.89 | 21.23 | 1,863.17 | 340.13 | 4.40 | 1,862.73 | 340.78 | 4.28 | 1,106.57 | 442.89 | 21.23 |
| 5 | 1,111.34 | 454.64 | 22.27 | 1,914.90 | 358.50 | 4.92 | 1,914.73 | 359.21 | 4.63 | 1,111.34 | 454.64 | 22.27 |
| 6 | 1,238.52 | 486.13 | 27.13 | 2,020.38 | 382.16 | 6.15 | 2,020.17 | 382.51 | 6.02 | 1,238.52 | 486.13 | 27.13 |
| 7 | 1,526.11 | 531.77 | 37.23 | 2,245.65 | 420.57 | 8.67 | 2,245.51 | 420.64 | 8.70 | 1,526.11 | 531.76 | 37.23 |
| 8 | 1,788.20 | 594.91 | 51.05 | 2,489.30 | 470.71 | 12.58 | 2,489.87 | 471.46 | 12.54 | 1,788.20 | 594.91 | 51.05 |
| 9 | 2,135.39 | 631.60 | 69.72 | 2,733.23 | 494.64 | 18.70 | 2,733.10 | 497.25 | 18.05 | 2,135.39 | 631.60 | 69.72 |
| 10 | 2,520.88 | 703.82 | 94.31 | 3,075.75 | 553.19 | 26.72 | 3,073.45 | 554.63 | 26.12 | 2,542.32 | 655.32 | 66.20 |
| 11 | 3,259.46 | 753.15 | 136.36 | 3,580.62 | 600.87 | 43.22 | 3,580.08 | 602.08 | 42.66 | 3,312.37 | 660.08 | 74.87 |
| 12 | 4,381.75 | 712.27 | 100.53 | 4,358.70 | 623.62 | 64.36 | 4,357.32 | 623.94 | 62.13 | 4,388.53 | 627.31 | 66.71 |
| 13 | 4,592.62 | 749.21 | 87.94 | 4,626.23 | 653.72 | 71.87 | 4,626.14 | 654.30 | 71.11 | 4,590.40 | 652.45 | 71.34 |
| 14 | 5,238.74 | 660.30 | 88.52 | 5,283.81 | 658.17 | 88.14 | 5,283.17 | 667.45 | 86.08 | 5,283.74 | 663.43 | 89.86 |
| 15 | 5,569.56 | 678.75 | 98.03 | 5,571.54 | 675.30 | 99.41 | 5,570.10 | 686.73 | 96.04 | 5,569.83 | 677.88 | 96.33 |
| 16 | 6,027.52 | 680.43 | 115.49 | 6,031.16 | 679.52 | 111.25 | 6,030.55 | 688.53 | 110.43 | 6,027.52 | 679.62 | 111.87 |
| 17 | 5,661.43 | 703.67 | 101.32 | 5,668.57 | 694.87 | 101.54 | 5,668.80 | 704.82 | 99.68 | 5,661.51 | 694.90 | 98.73 |
| 18 | 5,191.29 | 691.41 | 86.01 | 5,200.92 | 689.02 | 86.79 | 5,198.72 | 691.58 | 84.05 | 5,191.30 | 689.14 | 84.60 |
| 19 | 4,800.46 | 787.10 | 107.53 | 4,795.81 | 670.36 | 74.60 | 4,796.56 | 670.62 | 74.46 | 4,796.37 | 670.71 | 74.68 |
| 20 | 4,471.30 | 790.63 | 131.68 | 4,489.46 | 668.01 | 67.22 | 4,487.32 | 671.06 | 64.92 | 4,510.21 | 678.83 | 80.25 |
| 21 | 3,409.43 | 791.02 | 146.62 | 3,738.31 | 632.78 | 44.91 | 3,737.65 | 635.53 | 43.25 | 3,465.17 | 697.57 | 81.64 |
| 22 | 2,265.71 | 703.55 | 83.41 | 2,926.10 | 566.81 | 24.56 | 2,926.31 | 567.51 | 24.01 | 2,265.52 | 703.82 | 83.63 |
| 23 | 1,850.37 | 613.53 | 56.35 | 2,543.82 | 491.53 | 15.08 | 2,543.49 | 491.88 | 14.90 | 1,850.37 | 613.53 | 56.36 |
| 24 | 1,586.72 | 554.93 | 42.49 | 2,310.37 | 437.01 | 10.31 | 2,310.36 | 437.29 | 10.22 | 1,586.72 | 554.93 | 42.49 |
| Total | 7,3229.59 | 1,5148.47 | 1,774.48 | 8,3074.02 | 1,2879.09 | 1,005.63 | 8,3062.59 | 12,938.61 | 983.94 | 73,444.23 | 1,4494.21 | 1,477.45 |
| S | 90,152.54 | 96,958.74 | 96,985.14 | 89,415.89 | ||||||||
| Algorithm | Average Operation Cost ($) | Average Emission Cost ($) | Average Network Loss Cost ($) | Average Composite Cost ($) | Composite Cost Standard Deviation |
|---|---|---|---|---|---|
| PSO | 7,3671.87 | 1,4539.39 | 1,480.83 | 89,692.09 | 41.22 |
| DE | 7,3657.02 | 1,4535.07 | 1,481.64 | 89,673.73 | 39.67 |
| MDE | 7,3452.51 | 1,4498.25 | 1,479.38 | 89,430.14 | 11.60 |
| Total Operation Cost ($) | Total Emission Cost ($) | Total Network Loss Cost ($) | Total Composite Cost ($) | |
|---|---|---|---|---|
| Case 5 | 73,637.41 | 15,283.04 | 2,166.86 | 91,087.31 |
| Case 6 | 83,462.27 | 13,021.11 | 1,309.14 | 97,792.52 |
| Case 7 | 83,446.58 | 13,118.72 | 1,286.50 | 97,851.80 |
| Case 8 | 73,983.52 | 14,617.26 | 1,799.23 | 90,400.01 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, R.; Li, T.; Deng, X.; Ye, J. Optimal Day-Ahead Scheduling of a Smart Distribution Grid Considering Reactive Power Capability of Distributed Generation. Energies 2016, 9, 311. https://doi.org/10.3390/en9050311
Yuan R, Li T, Deng X, Ye J. Optimal Day-Ahead Scheduling of a Smart Distribution Grid Considering Reactive Power Capability of Distributed Generation. Energies. 2016; 9(5):311. https://doi.org/10.3390/en9050311
Chicago/Turabian StyleYuan, Rongxiang, Timing Li, Xiangtian Deng, and Jun Ye. 2016. "Optimal Day-Ahead Scheduling of a Smart Distribution Grid Considering Reactive Power Capability of Distributed Generation" Energies 9, no. 5: 311. https://doi.org/10.3390/en9050311
APA StyleYuan, R., Li, T., Deng, X., & Ye, J. (2016). Optimal Day-Ahead Scheduling of a Smart Distribution Grid Considering Reactive Power Capability of Distributed Generation. Energies, 9(5), 311. https://doi.org/10.3390/en9050311