1. Introduction
The amount of distributed generation (DG) in the electric power system has been increasing significantly in the last few years due to the technical, economic and environmental benefits they offer. However, the distribution networks are not designed to cope with large amounts of generation, as in the past, only loads were connected to them, and large power plants were connected to the transmission network. This gives rise to many challenges, such as dealing with current congestion and voltage problems in the feeders and bi-directional power flows that change, e.g., protection device requirements. To deal with these issues, more flexibility is needed in the distribution network. Some concepts that focus on providing flexibility are the microgrid concept, assisting the grid in a bottom-up approach, and the smart grid concept, assisting the grid by means of more metering, sensing and communication.
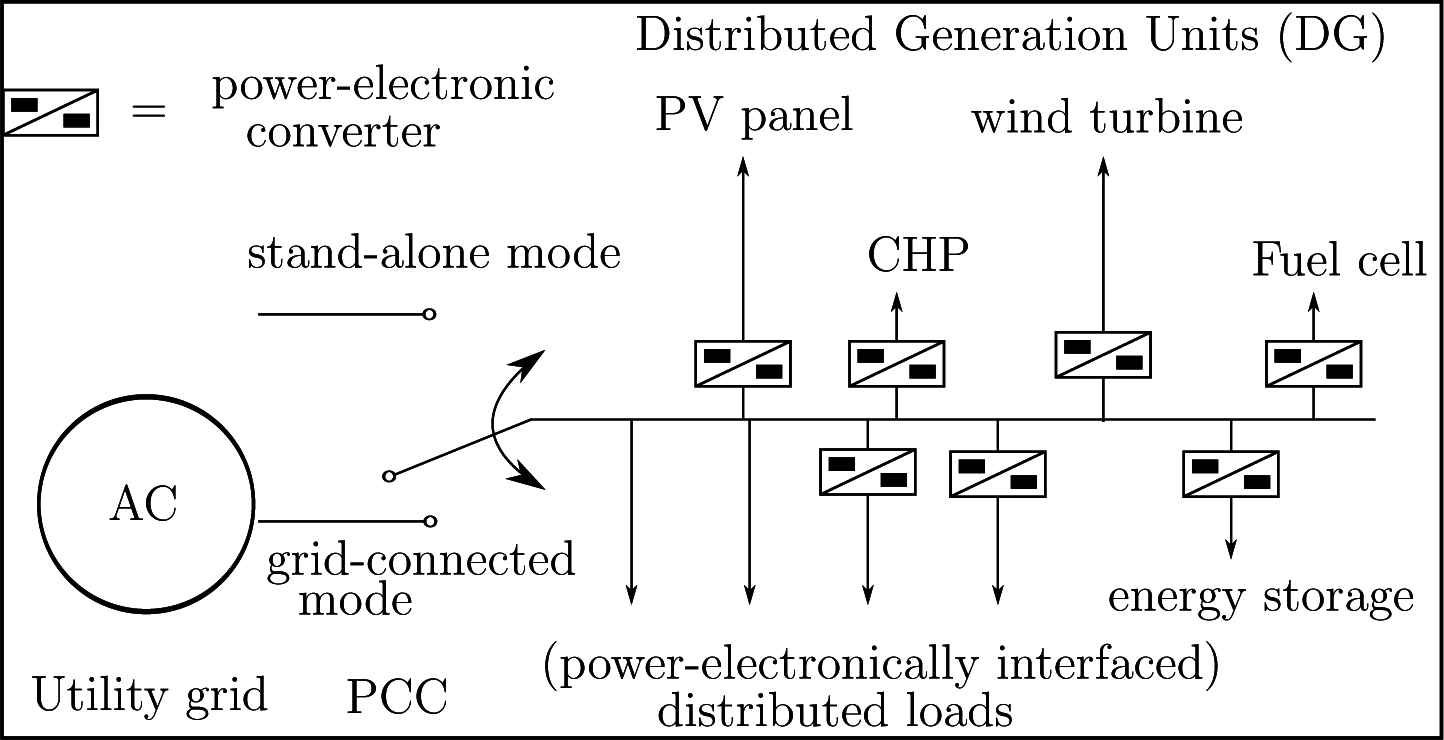
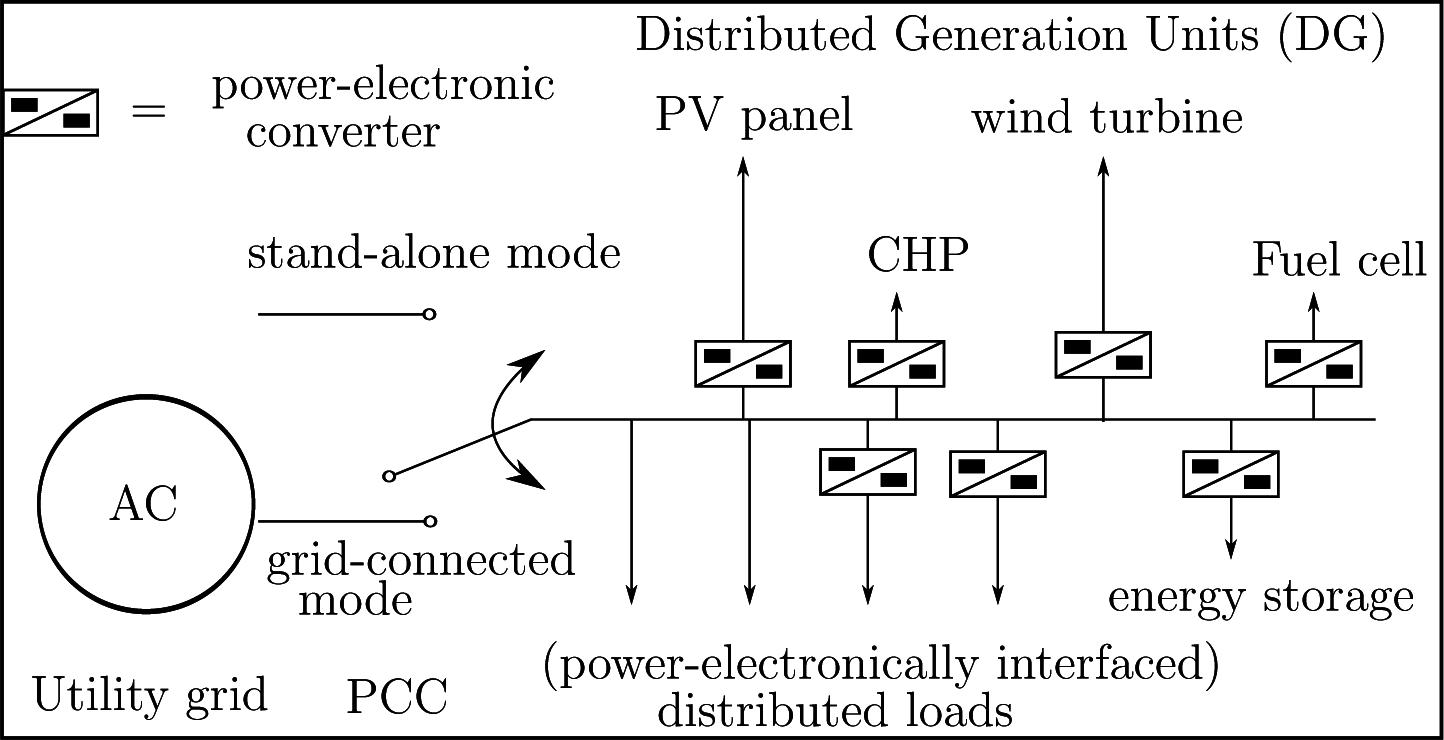
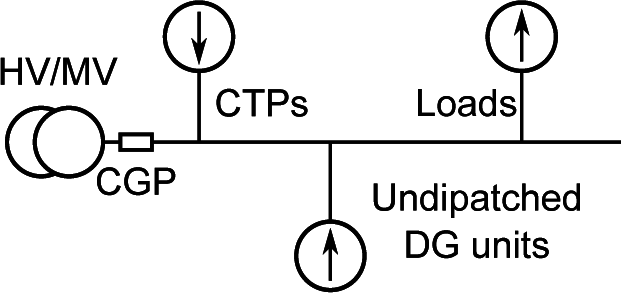
A microgrid consists of an aggregation of generators, loads and storage elements, as depicted in
Figure 1, that can deliver both electrical and heating power and cooperate in order to achieve certain goals. These goals can differ depending on the type of microgrid. For instance, a microgrid can benefit from market participation by flattening the load profile, which lowers the electricity tariffs [
1,
2]. The main advantages of microgrids are that they achieve a coordinated integration of distributed generation (DG) units in the electric power system, improve the reliability of the grid, enable a more efficient usage of energy and become a controllable entity in the power system. Specific for microgrids is that they have clearly-defined electrical boundaries, e.g., with one point of common coupling (PCC) with the electric power system. Furthermore, many of the microgrid assets are power-electronically interfaced with the grid.
In the current and future evolutions of the electric power system, often, the smart grid concept is highlighted. Smart grids add extra communication, measurements and control to the system for a more efficient and better operation. A smarter exploitation of the grid aims at avoiding the large investments required to cope with the increasing grid loads, the integration of new (renewable) production units and the sometimes aged infrastructure. It is not realistic that the smart grid will emerge from a revolution, but rather, a gradual evolution to an increasingly smarter grid is expected [
3,
4]. Because of their flexibility and scalability, microgrids are likely to play a primordial role in the evolution of the smart grid [
5], with smart microgrids as pilot versions or building blocks of the future electricity system [
6]. Instead of investing in extra smart grid facilities on a large scale, investing in smart microgrids at critical locations will be achieved more quickly and more cost efficiently. The smart grid will therefore probably consist of integrated smart microgrids [
3]. In essence, the aim of microgrids and smart grids is equal,
i.e., cost minimization, coping with the increasing demand, integration of renewable power sources, maximizing the asset utilization and increasing the efficiency of the power system.
In microgrid research, much attention has been given to the primary control of microgrids [
2,
7–
12] and developing a hierarchical control structure [
13–
17]. However, an important aspect of microgrids is delivering ancillary services to the electric power system. For example, microgrids can mitigate the required costs for increasing the penetration of renewable DG units in the electric power system by allowing for the theoretical occurrence of congestion in the planning stage, but solving the actual congestion issues (
i.e., voltage and current congestion) in the operational stage of the system. In this paper, current congestion in a microgrid feeder is solved by controlling the DG units. By controlling the DG units, the considered distribution network feeder is more flexible, with flexibility given in a bottom-up approach. This shows an initial case for integrating microgrid operation in the conventional electric power system, as microgrids are expected to emerge step by step in a gradual evolution of the traditional power system [
3].
Many distribution network operators (DNOs) are facing the challenge of an increasing share of distributed generation (DG) units in their networks. Simultaneously and related to this, a clear trend for the DNOs is to achieve a better monitoring of their network by using different metering infrastructures coupled to advanced supervisory control and data acquisition (SCADA) systems and high-speed data communication [
18]. The evolution of power distribution networks towards so-called active distribution networks (ADNs) requires the availability of a suitable distribution management system (DMS) to achieve specific operation objectives, such as an optimal voltage/line-congestion control, fault detection and localization, post-fault management, local load balancing and network loss minimization [
19–
21]. Many papers, such as [
22,
23], have dealt with the functionalities of a DMS; however, in practice, generally, only the basic functionalities are being exploited at this time, such as the monitoring and remote switching of the system. The DMS system is often also capable of programming control algorithms and sending various control set points to the grid assets. However, these capabilities are generally not yet effectively used.
Because many DG units are power-electronically interfaced to the electric power system, they can control the output current at their terminals swiftly. Hence, the next step towards fully-active distribution networks is to couple the control functions of the DMS system with those of the available DG units. Many DNOs have the clear vision of strivingtowards a global cost-effective solution to integrate DG units in the network. The hosting capacity of the distribution networks towards DG units is limited because of several challenges, such as dealing with voltage and current congestion problems. Hence, next to investing in the grid assets, smart control strategies for coordinating the DG units can be used as an alternative in order to tackle these challenges if this proves to be more cost effective in the long run. If only network investments and flexibility provision by DG units are taken into account for dealing with current and voltage congestion, depending on the network investment costs and the cost of the loss of renewable energy capturing, a decision between these two methods can be made in the planning stage. Often, the last option proves to be more cost effective. Both feeder and substation transformer congestion can be tackled with this control.
In the European FP7 project INCREASE (Increasing the penetration of renewable energy sources in the distribution grid by developing control strategies and using ancillary services) [
24], a hierarchical control, consisting of a local and an overlaying control, for low- and medium-voltage networks is investigated. The local control is responsible for voltage control and unbalance mitigation without inter-unit communication. The voltage control is based on the
P/
V droop control [
25], and the unbalance mitigation is based on the damping control strategy of [
26]. The damping control can also assist in power quality improvements of the power system via voltage dip mitigation [
27]. The overlaying central control level optimizes the outputs of the local control strategies and handles issues, such as current congestion, which are not sensed locally by the DG units. For the overlaying control, either a multi-agent system (MAS) [
28,
29] or a central control system (such as the DMS) can be used in the case of low-voltage networks. In medium-voltage networks, an overlaying DMS control,
i.e., a central control, is more appropriate than in low-voltage networks, because of the huge amount of small assets in the latter.
In this paper, the DMS system of the DNO is used to centrally control wind turbines in case of line current congestion on the local distribution network. The wind turbines connected to the medium-voltage (MV) networks, which are in the MW range, are generally capable of receiving set points from a remote control system and controlling their active power generation towards this set point. By centrally curtailing these wind turbines: (1) they can be connected more quickly to the grid than when asset investments and the necessary changes in the lines and transformers of the involved feeders need to be made; and (2) investment costs can be delayed or even canceled. For the curtailment, the control strategy has three main requirements: (1) securely operating the grid; (2) limiting the (unnecessary) curtailment; and (3) being generic enough to be easily extended to other feeders.
In this paper, in Section 2, some characteristics with respect to the control strategy are discussed. In Section 3, different options for implementing the congestion control in a DMS system are compared with respect to the unnecessary curtailment and the over-current. In Section 4, the implementation of the control algorithm in the DMS is discussed.
4. Congestion Management: Parameter Determination
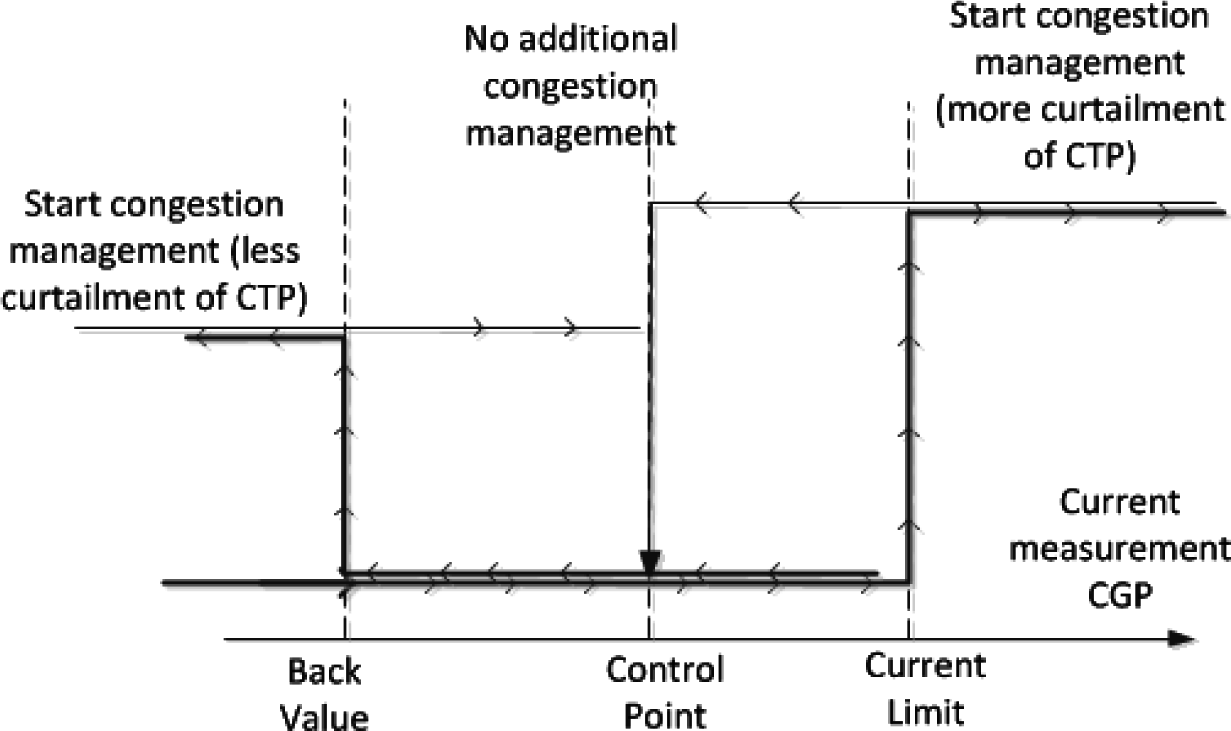
In this section, how to implement the congestion management strategy is discussed, and the choices concerning the parameters are clarified. First, the theoretical curtailment is discussed in Section 4.1, meaning that the control strategy operates infinitely quickly and accurately to lower the current below the current limit. However, as discussed in Section 3.2, an immediate response is not required, as congestion is a temperature issue, rather than a current issue. Therefore, the presented control algorithm works with a hysteresis band. The width of this band should be tuned, which is discussed in Section 4.3. In Section 4.2, different ways of lowering the curtailment of the wind turbines are discussed. Next, the hysteresis controller can be of the proportional (P) or proportional-derivative (PD) control type, as discussed in Section 4.4. Finally, the value of the threshold value is discussed in Section 4.5.
4.1. Theoretical Curtailment as a Function of Installed Power
Theoretically, thus with perfect controllers without delay times, the renewable energy capturing in the considered system is compared for different values of the power installed (from 93% to 130% of the 360-A cyclic current limit). This is also done for different threshold values (TVs) (360 A, or permanent current limit
versus 390 A, or cyclic current limit in the considered feeder) in
Table 5. With the upscaled wind profile used in the following simulations, the installed power of the wind turbines equals 93% of the cyclic current limit. Still, congestion occurs, as there are other traditional,
i.e., uncontrolled DG units that are not flexible connected to the system. For this wind turbine penetration level, only 93.2% of the current is allowable in the CGP when the threshold value is the cyclic value. This drops to 89.6% in the case of the permanent value for the threshold value. The result of 93% is the reference point for further simulations. Here, a rather low energy capturing is obtained, as in the feeder, the traditional DG output is already significantly upscaled. For increasing penetration of wind turbines up to 130%, it is shown that the renewable energy capturing relatively drops less than the increase of wind turbine penetration. Therefore, with the presented control algorithm, a relatively large wind turbine penetration in the system is allowed with minimal energy loss due to curtailment.
4.2. Relief of Curtailment
Below, several possibilities to implement the hysteresis control in the DMS are compared, for a threshold value of 360 A (the permanent current).
When the current in the CGP drops below the back value and the CTPs are being curtailed, higher set points need to be sent to the CTPs. For this, several possibilities are discussed with respect to the control algorithm and the effect on the captured energy and the congestion control results:
full relief of set point, i.e., sending 100% to the CTP
stepwise reliefuntil the CGP measurement is close to the control point
reliefcalculated until the CGP measurement equals the control point (discussed above)
The different strategies for relieving the curtailment are only applied when there is sufficient wind; when the CGP measurement does not increase after sending set points, a 100% set point is sent, and the curtailment is stopped.
4.2.1. Full Relief
When the current in the CGP drops below the back value, the curtailment of the wind turbine is fully stopped; hence, a set point of 100% is sent to the turbine. If the CGP is under its back limit because the load has increased, the wind turbine output will increase. This may lead again to an over-current condition and the calculation of a new set point (now with less curtailment of the wind output) to the wind turbines. Hence, this strategy is beneficial for the capturing of renewable energy, but not for the safeguarding of the CGP.
A full relief has the following characteristics:
easy to implement
when current in CGP drops below the back value because the wind has dropped; full relief of control has no effect, as the output of the CTP will not change
lower loss in the capturing of the available renewable energy
more exceeding of the TV is possible
In
Table 6, the results of this strategy implemented with different hysteresis bands are compared for a TV of 360 A. Note that a comparison between different hysteresis band widths is made in the next paragraph. The value “set point control” signifies the percentage of time that the DMS sends a set point to the wind turbines. The value “current above the threshold value” is the percentage of the available current that is still above the threshold value. This is an intrinsic feature of the control strategy, as it only starts acting on currents that are above this limit, and the sampling time equals one minute. From
Table 6, it is clear that the “full relief” strategy leads to a higher renewable energy capturing compared to the case with controlled relief of curtailment; at the cost of more current in the CGP above the TV. Therefore, a controlled relief is more beneficial with respect to safeguarding the thermal limits of the distribution lines.
4.2.2. Stepwise Relief
Another methodology for relieving the congestion control is by including a stepwise relief of the curtailment. If the current in the CGP is lower than the back value, the set point, i.e., the upper limit of the output of the wind turbine, is increased by a value that is here referred to as the “step”. When the wind output is lower than the set point, the curtailment is omitted, and 100% is sent to the CTP.
In
Table 7, for a hysteresis band of 20 A, the simulation results for different values of the parameter step are compared. The case where the step is in between 38 and 500 A is the same as the case with full relief. The reason is that the wind turbine output changes are limited to 38 A per minute, thus per step. Hence, the step needs to be less than the rate limit; otherwise, the control action needs to wait for the wind turbine to react.
The table shows that this leads to unnecessary delays in the control and a significantly disadvantageous effect on the wind energy capturing.
4.2.3. Controlled Relief
The “controlled relief” strategy is implemented in such way that when the current in the CGP drops below the back value, a new set point is calculated for the CTPs in order to increase this current back to the control point if sufficient wind is available.
Another way of relieving the control strategy is doing so by using the controlled relief strategy. A controlled relief of the settling points is included. The “controlled relief” strategy is implemented in such way that when the current in the CGP drops below the back value, a new set point is calculated for the CTPs in order to increase this current back to the control point if sufficient wind is available. A disadvantage of this strategy is that set points can be increased to a significant extent in one step, whereas in the previous sections, set points were increased more slowly. The main advantage is that it is similar to the way for curtailing the wind turbine. The results are presented in
Table 8. Again, the effect of different hysteresis band widths is discussed further in Section 4.3.
In conclusion, it is the best strategy to relieving the curtailment set point. The wind energy capturing is significantly higher than that in case of the stepwise relief. Furthermore, the current above the TV is lower than in the case of the full relief of control action, as this control strategy calculates a new maximal power output, i.e., a set point for avoiding current congestion, while the full relief omits the curtailment, which may lead to the current again increasing above the TV.
4.3. Hysteresis Band
In this section, again, a TV of 360 A is assumed.
Here, the effect of the width of the hysteresis band (i.e., the threshold value minus the back value) is investigated. In the control, the reaction time of the CTPs is taken into account before sending new set points. A controlled relief of the settling points is included.
Table 8 shows the results of this simulation. From the theoretical results, already a highly congested line is studied (only wind capturing of 93% in this theoretical case, because of the upscaling of the wind and other traditional DG output). The table shows that during around 12% of the time, a set point is sent to the CTPs (set point control). Around 0.5% of the current in the CGP is above the threshold value (TV), and about 3%–5% of the current, depending on the width of the hysteresis band, in the CGP is in between the back value and the TV, while a set point is being sent to the CTP. The wind turbine is curtailed for about 12%–15% of the current in the CTP. The simulations show that using a hysteresis band has a slight effect on the wind capturing; however, this is limited and the advantages of:
avoiding frequent set point changes to the CTP
allowing some load variations
dealing with measurement error (good current measurements in the distribution network obtain a measurement error of about 3%)
dealing with slight load variations without resending set points to the CTPs
outweigh this. Hence, a hysteresis band of 20 A or 6% of the 360 A TV is a good compromise. If the hysteresis band equals 20 A, the back value equals 340 A and the control point is 350 A. Furthermore, the captured wind is close to its theoretical value, so that only minor benefits can be realized from investing in more advanced control options, such as model-based predictive control. For very small hysteresis band widths, slightly more than the theoretical wind capturing is obtained. This increased capturing is because the threshold value is chosen to be equal to the permanent current, and with the studied control algorithm, this value is exceeded for short amounts of time. This is allowed in practice, as temperature, rather than current, is the critical factor, whereas in the theoretical case, this current is not exceeded.
4.4. PD Action
In this section, a PD action (see further in
Figure 6) on the measurement of the CGP is turned on in order to anticipate fast changes in the CGP current, while still calculating the value for relieving the control action. The input for the limiter depends on the measurement of CGP (
ICGP,k) at the present time, as well as on this at the previous time step (
ICGP,k−1):
Depending on the value of the mitigation parameter
α, the D (Derivative) action is changed, which has an effect on the results, as depicted in
Table 9.
The case with α = 1 is the same as the one without D action. This shows that the D action can improve the capturing of renewable energy; however, this leads to more current above the TV.
4.5. Threshold Value: Results
For variable amounts of installed CTP power, the wind energy capturing (% of available current) and the percentages of
ICGP above the 360/390 A or
iCGP,360 and
iCGP,390 are compared in
Table 10 for the control strategy with controlled relief of the control action without D action. The one with 360–390 A shows the results for when the threshold value depends on the load factor. The results of this are very close to the results of when the cyclic current defines the TV, meaning that the wind profile is mostly cyclical.
For comparison, the theoretical wind capture (without control) results are depicted in
Table 11.
Hence, the control captures approximately 97% of the allowed wind power.
5. Implementation in the DMS
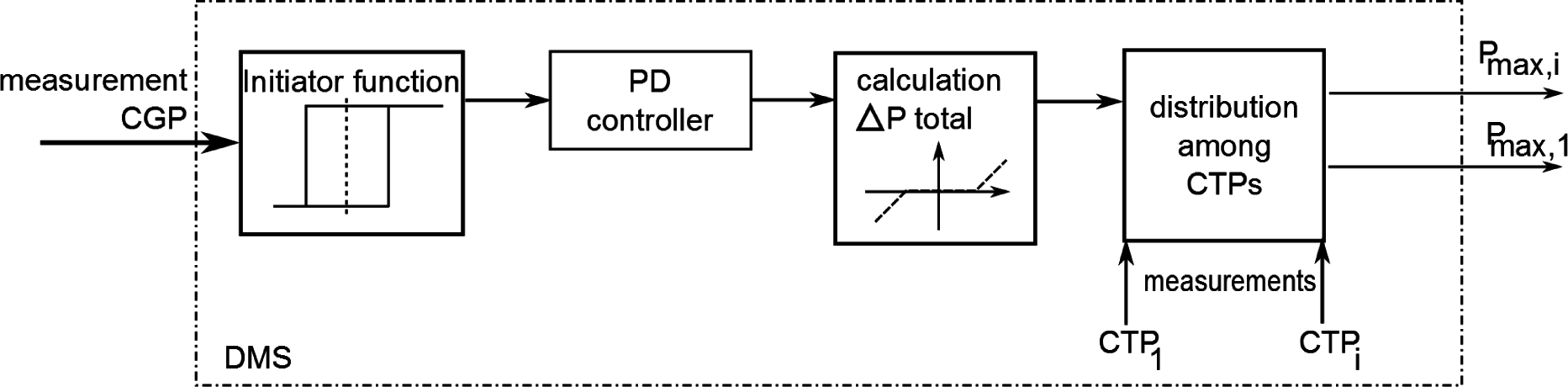
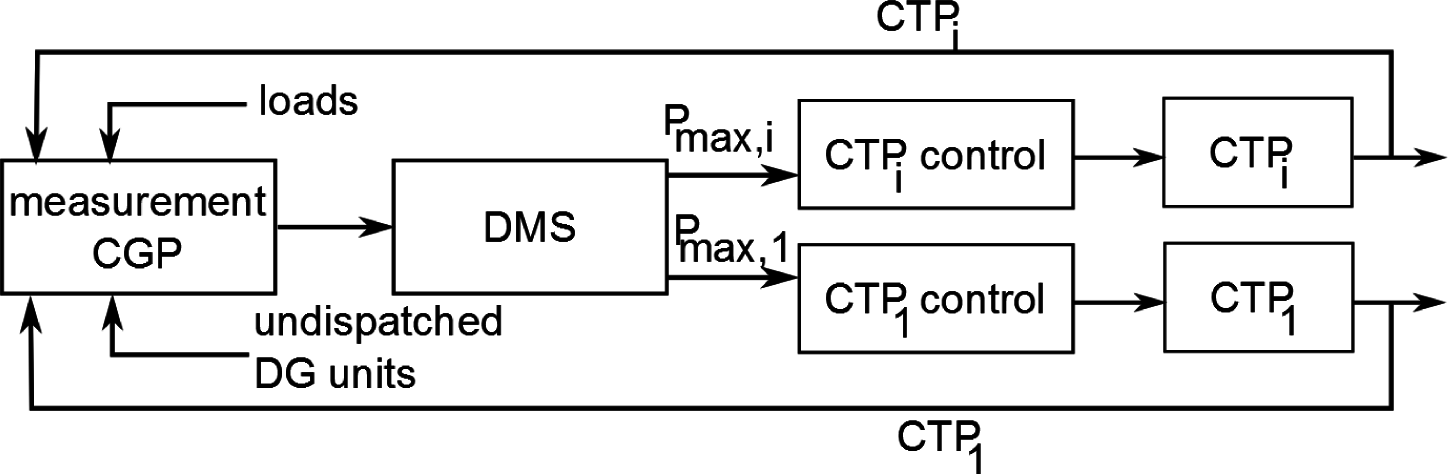
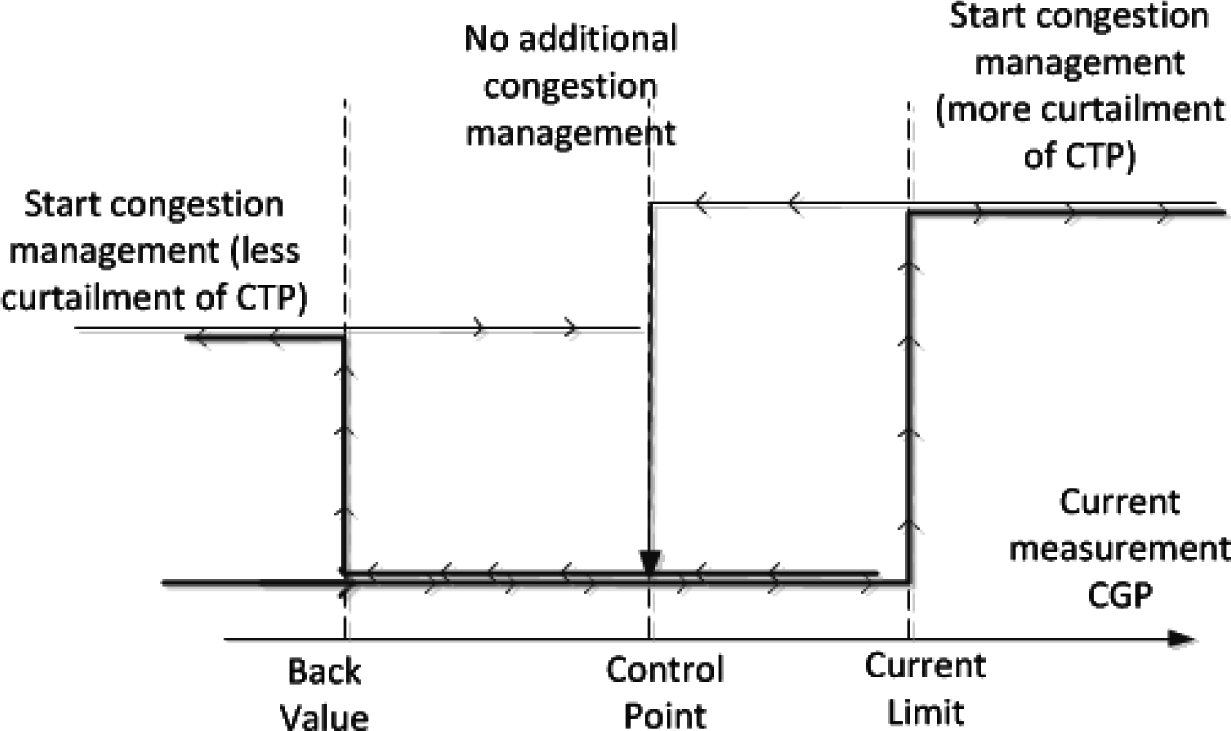
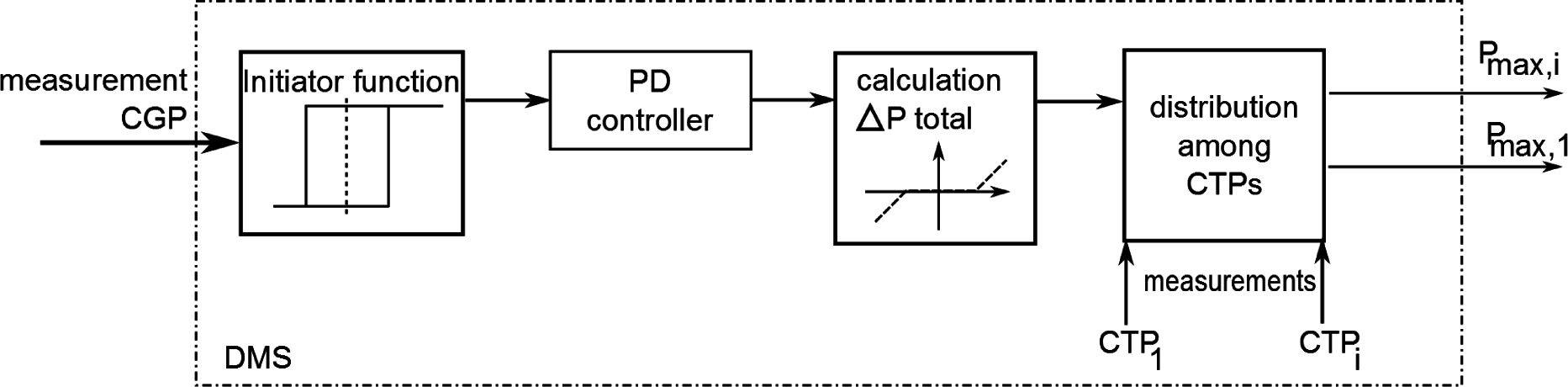
The DMS controller has as input a measurement in the CGP as depicted in
Figure 6. The operation of the control strategy is triggered by a comparison of this CGP measurement with the congestion management initiator function (“trigger”). Hereafter, a PD controller can be included. The D-action can anticipate a fast change of the current in the CGP. The internal controller (“distribution over CTPs”) distributes the total amount of power to be changed in the CGP Δ
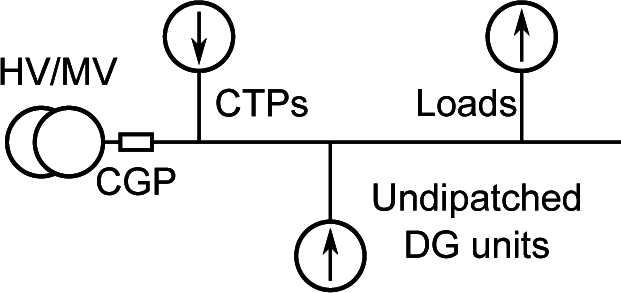
P among the CTPs. For this, a tracing of the feeder is performed in order to determine which assets on the feeder are CTPs,
i.e., flexible distributed generation units. For the distribution of the curtailment on multiple CTPs, different strategies can be followed, such as LIFO (last in first out) or
pro rata [
40]. In
pro rata, each CTP is curtailed proportionally to its ratings, while in LIFO, first, the units that are most recently connected to the system are curtailed. In this project,
pro rata curtailment is assumed. In a
pro rata strategy, each CTP receives the same set point
Pmax. Recalculation is required when: (1) it is
a priori known that the CTP will not react (e.g., because of insufficient wind to increase the output power); or (2)
ex post the congestion issue in the CGP is not yet solved after sending set points to the CTPs.
Note that a set point of active power for a wind turbine denotes an upper limit of active power.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}