1. Introduction
In recent years, environmental concerns, fossil fuel resource depletion and advances in technology have resulted in the increase of distributed generation (DG) in distribution networks [
1,
2]. Reasonable application of DGs can bring many advantages, such as voltage profile improvement and pollutant emission reduction [
3,
4,
5]. However, inappropriate allocation of DGs may also lead to voltage fluctuations and system instability due to the uncertain nature of renewable resources [
6,
7]. It is crucial to develop proper models and methodologies to identify the optimal allocation of DGs, the aim of which is to determine the best types, locations and sizes of DGs taking into account system uncertainties.
The optimal DG allocation (ODGA) problem in distribution networks has been investigated in the literature from different perspectives. In [
8], an optimization model was proposed for optimizing DG allocation problem, but it mainly focused on total planning cost minimization. In [
9], four indices including real and reactive power loss, voltage profile and feeder capacity were considered for the ODGA problem in distribution systems with different load models. The optimization model was more comprehensive, but the environmental benefits were not taken into account. An analytical approach was developed in [
10] in order to determine the optimal location of DG to minimize the power loss of the system. However, the optimal sizes and types of DGs were not discussed. The authors in [
11] applied Game Optimization Theory (GOT) and Distance Entropy Multi-Objective Particle Swarm Optimization (DEMPSO) algorithm to solve the multi-objective optimization problem. However, the issues relating to DG types and uncertain outputs of DGs were not involved in the work. Studies in [
12,
13,
14,
15] applied various algorithms such as PSO, Honey Bee Mating Optimization (HBMO) algorithm, two-layer Simulation-Based Optimization (SBO) and modified Fire Fly (MFF) algorithm to obtain the optimal allocation of DGs, but all of them were based on deterministic methods, which may not be consistent with the actual situations.
Although renewable energy source (RES) generators are essential elements in the future distribution networks, only a few papers have considered the stochastic nature of RES-based DGs in system planning. The authors in [
16] proposed an improved adaptive genetic algorithm (IAGA) for solving the ODGA problem. The timing characteristics of DG outputs and loads as well as the environmental benefits are taken into account. The planning results considering uncertainties were more feasible in practical application. The authors in [
17] developed a method that embedded genetic-algorithm with Monte Carlo simulation (GA-MCS) to solve the ODGA model under the uncertainties of RES generation and volatile fuel prices. However, only total cost of DGs and energy losses were taken into account in the model, the environmental benefits were not considered. Reference [
18] proposed a multi-objective planning method based on GA considering system uncertainties. However, only the wind-based and photovoltaic-based DG units were considered, and the GA solution method has some shortcomings like premature and slow convergence, which may lose the best solution. In [
19], a novel method based on Cuckoo Search (CS) algorithm was proposed for low-carbon active distribution system planning. The uncertainties of renewable energy had been considered through scenario synthesis method. However, only the wind-based DGs were considered, and other kinds of DGs like photovoltaic generators and micro-gas turbines were not taken into account.
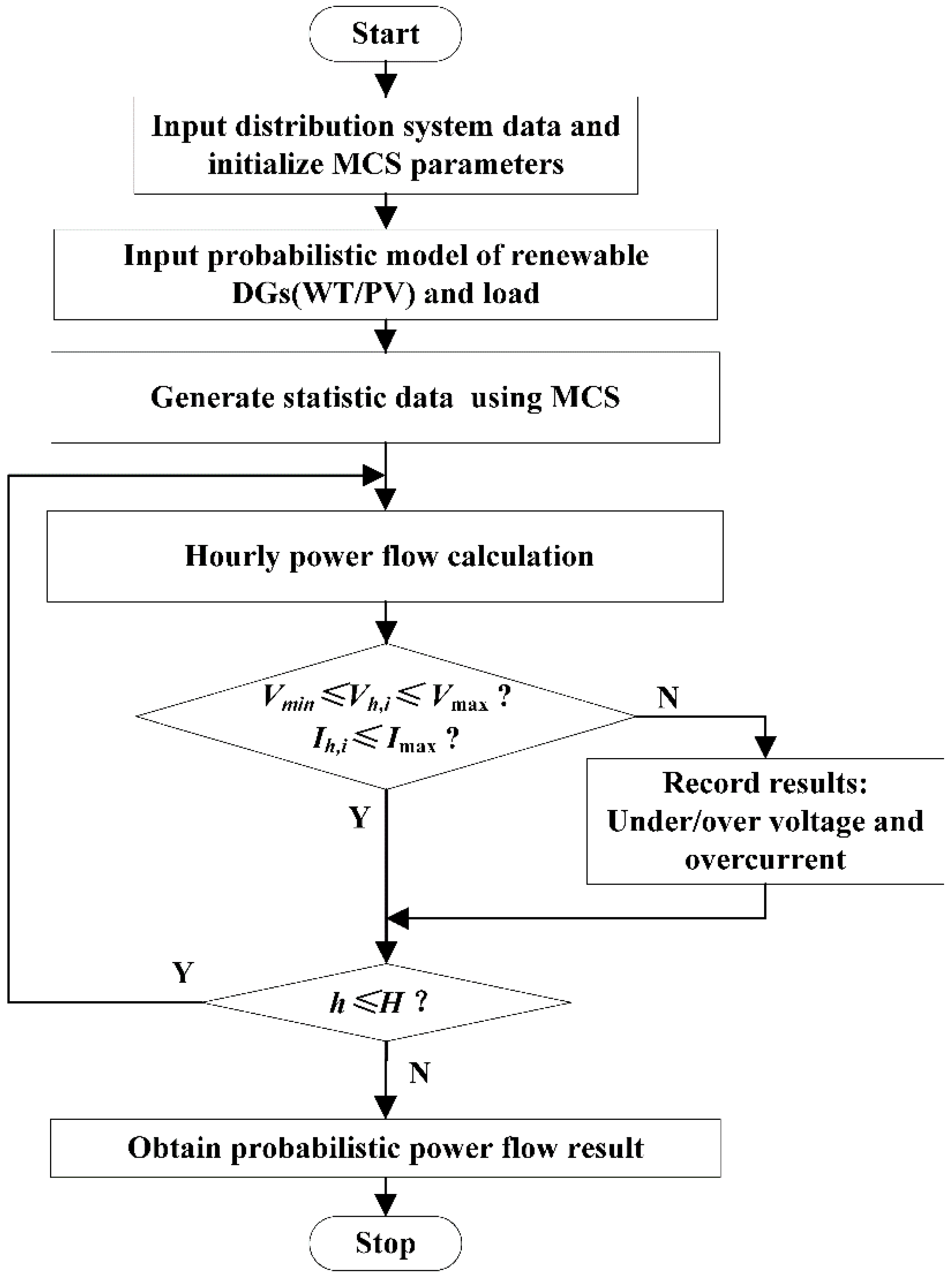
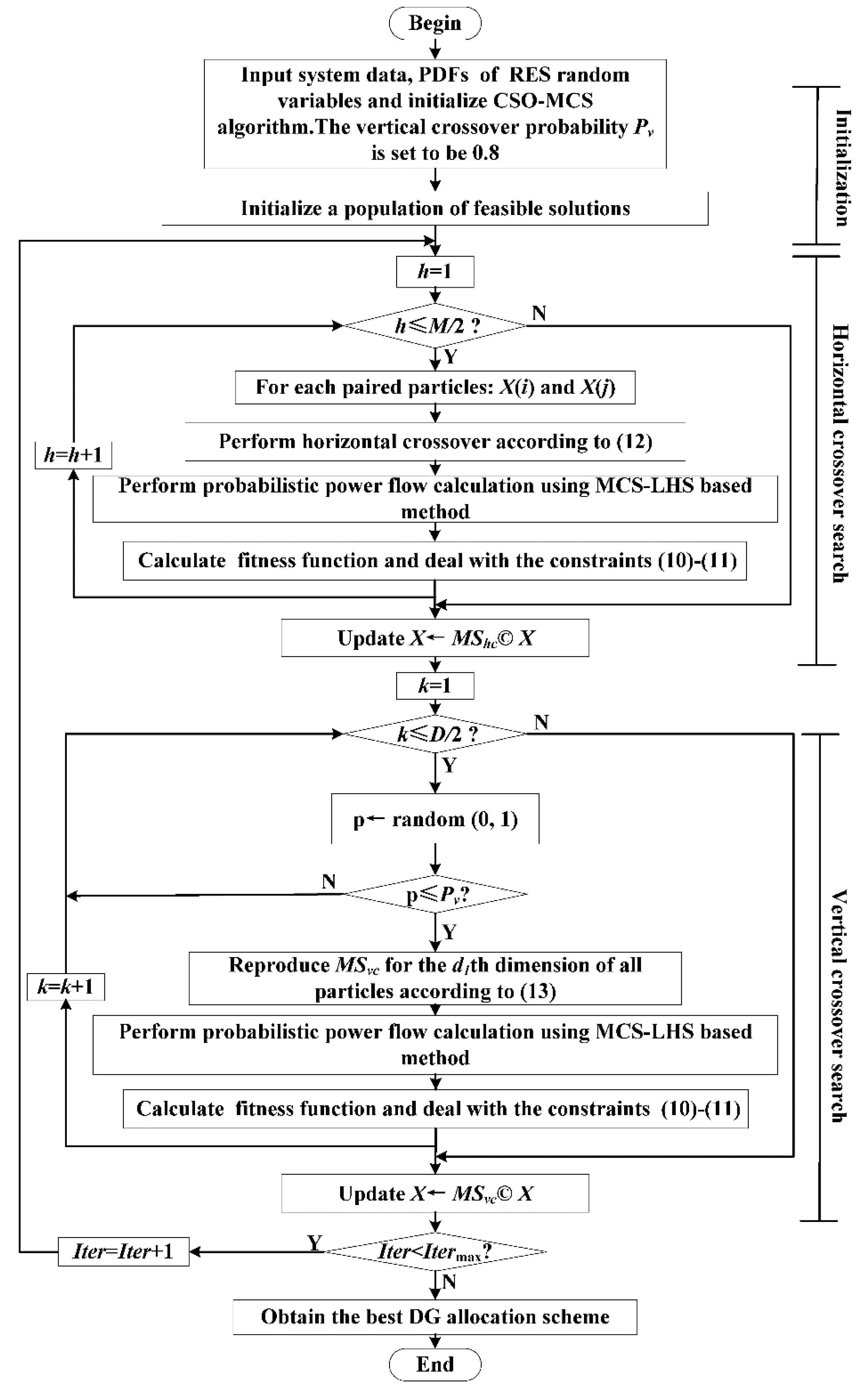
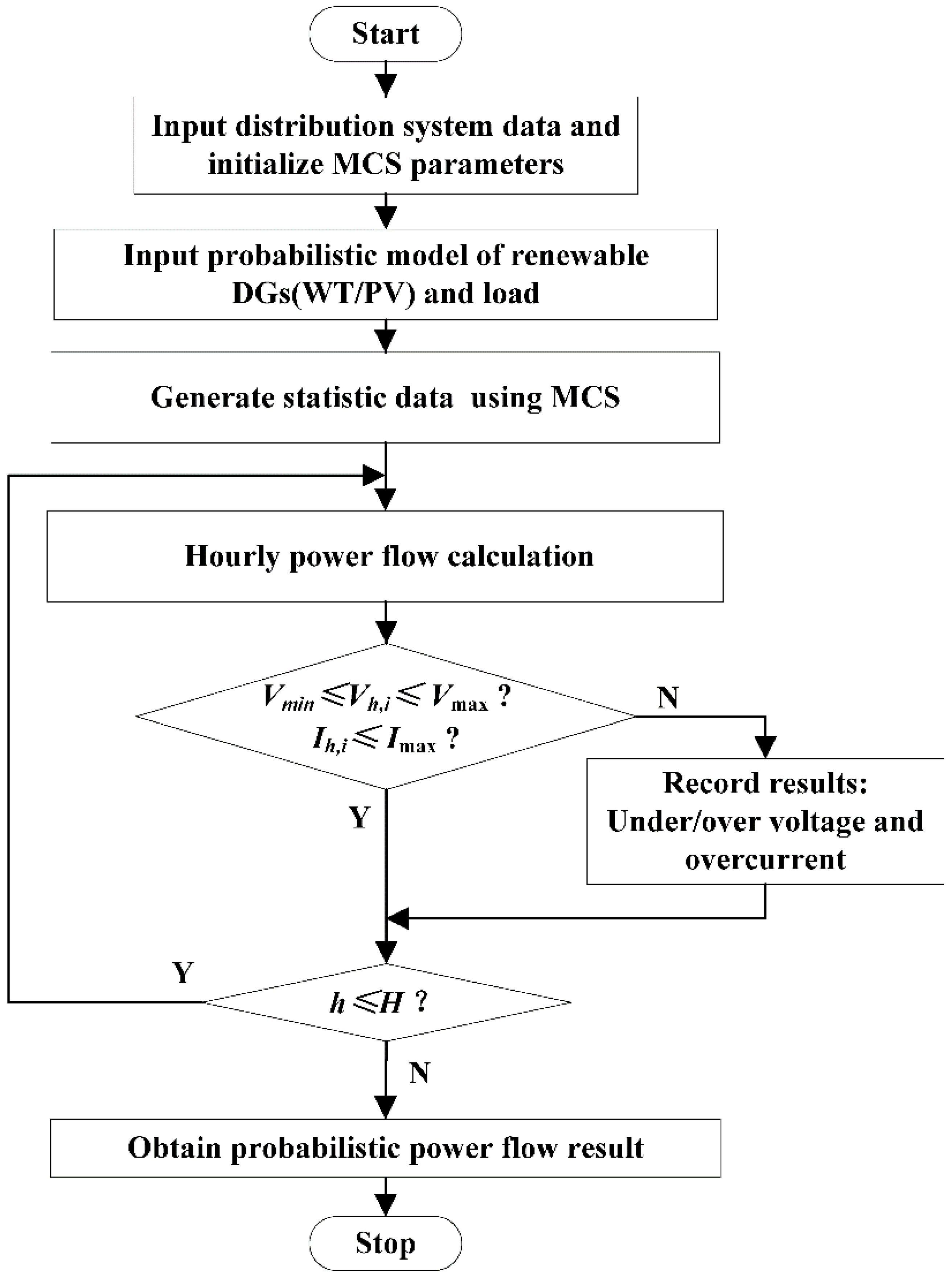
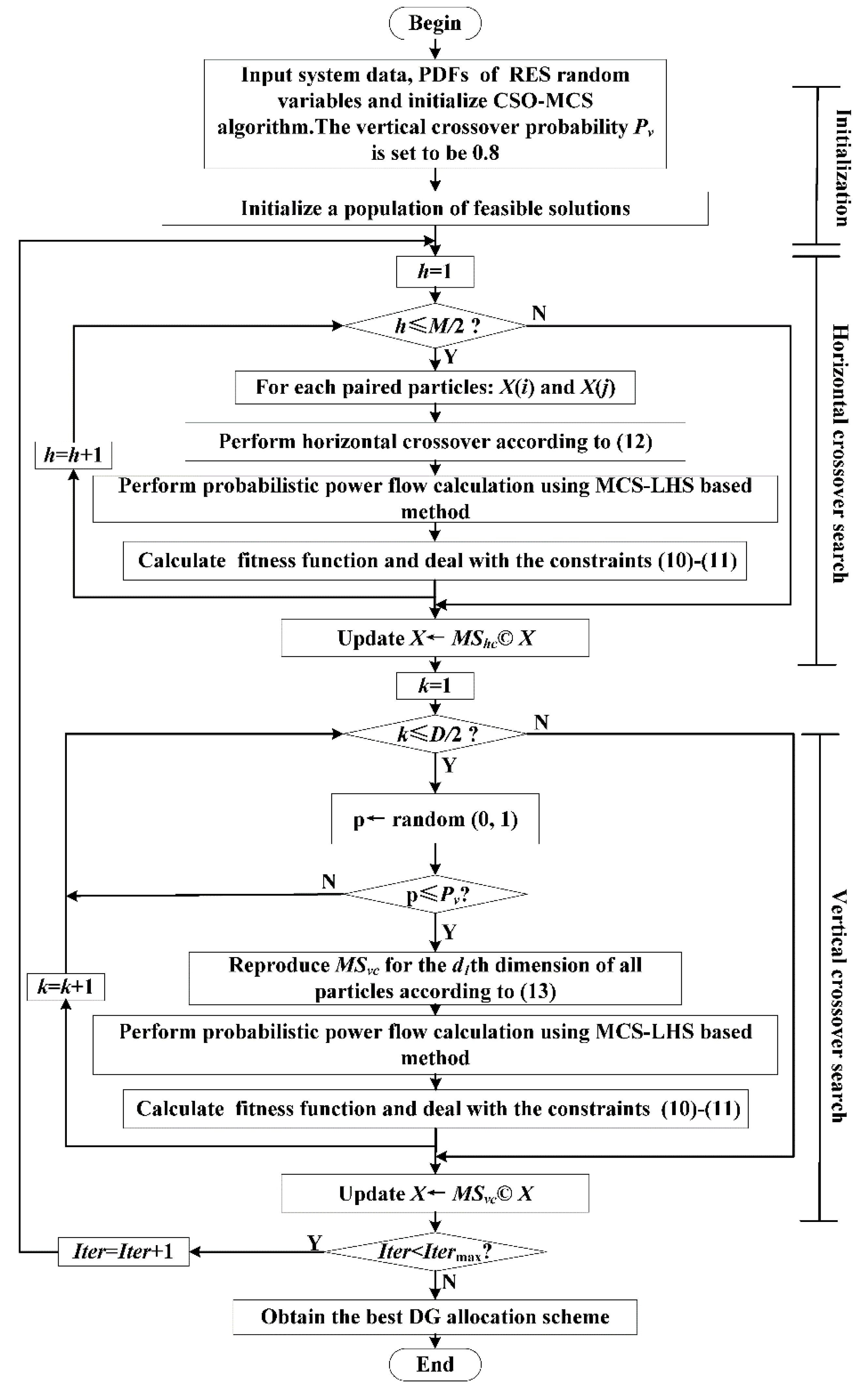
In this paper, we propose a novel approach integrating crisscross optimization algorithm and Monte Carlo simulation (CSO-MCS) for solving the ODGA problem. The crisscross optimization (CSO) algorithm is a recent evolutionary algorithm inspired by Confucian doctrine of gold mean and the crossover operation of genetic algorithm. Compared to other population-based algorithms, it offers lower computational burden and higher convergence speed when solving complex optimization problems. In this study, we firstly attempt to apply the CSO algorithm to solve the complex ODGA problem with technical benefits, economical benefits and environmental benefits taken into account. Meanwhile, to deal with the system uncertainties which have great influence on the DG planning results, an MCS-based method is adopted to solve the probabilistic power flow (PPF). Furthermore, we establish a multi-objective ODGA model based on a chance constrained programming (CCP) framework, aiming to determine the best types, locations and sizes of DGs in the distribution system. The pollutant emission cost, the total DG cost and the power loss costs are used to develop the objective functions. All these costs are represented by their net present values (NPV), which are compounded over the planning period of DGs. Three types of DGs including wind turbine (WT), photovoltaic (PV) generators and micro-gas turbines (MT) are considered in the ODGA problem.
The main contribution of this paper is to develop the CSO-MCS method to the ODGA problem considering system uncertainties of wind, solar and load consumption. The reminder of this paper is organized as follows:
Section 2 and
Section 3 present the modeling of system uncertainties and the ODGA model under CCP framework.
Section 4 introduces the proposed CSO-MCS solution strategy, and
Section 5 presents the results and discussion, followed by the conclusions in the last section.
5. Numerical Results
To comprehensively demonstrate the validity of the proposed CSO-MCS algorithm, simulation studies are conducted on two test systems which are widely used as benchmarks in the power system planning field for solving the ODGA problems. The two test systems are the 33-bus and 69-bus distribution systems, respectively. The first 33-bus system is a radial system with total load of 3.715 MW. The second 69-bus system is a widely used distribution system in the literature. The detailed data of the systems appear in [
30] and [
31].
The parameters of the proposed model are specified as follows: (1) The planning period of DG is 15 years; the discount rate is 12%; (2) The voltage magnitude cannot exceed ±5% of the nominal voltage and the power flow on the lines should not exceed 4 MVA with the confidence levels of 90% (
i.e., α = β = 0.9); (3) Weighting coefficients of Equation (9): μ = 0.2, λ = 0.38, ξ = 0.42. The electricity price is 0.089 $/kWh. The investment cost, operation, and maintenance cost and other technical parameters of WT/PV/MT generators can be seen in
Table 1. In a practical situation, it cannot be expected that the O&M cost and electricity price always keep constant along the time. However, in order to simplify the problem, it is assumed that the O&M costs and the electricity price are as constant in the simulations.
Table 1.
Technical specification parameters of different types of distributed generation (DGs).
Table 1.
Technical specification parameters of different types of distributed generation (DGs).
| DG type | Investment cost ($/kVA) | O&M cost ($/kWh) | Technical specification | Power factor |
|---|
| WT | 1882 | 0.01 | vio = 4 m/s, vco = 20 m/s, vn = 15 m/s | 0.95 lagging |
| PV | 4004 | 0.01 | Pstc = 1000 W/m2 | 1.0 |
| MT | 2293 | 0.012 | Stable power | 0.9 lagging |
The pollutant emission rates (kg/MWh) of different kinds of DGs are given in
Table 2. The environmental value standard and penalty for pollutant emissions are shown in
Table 3. When planning DG, a series of candidate places that suitable for installing specific types of DGs will be given, from the aspects of climate, geography and technology conditions. Then, the CSO-MCS will be used to determine the best schemes (
i.e., the best types, locations and sizes of DGs) among the given candidate locations taking into account the voltage amplitude, power flow and total costs of the distribution system. It is assumed that the candidate types and locations of DGs in the 33-bus and 69-bus systems are as shown in
Table 7 and
Table 8, respectively; the size of the each DG unit is within the limit between 10 and 500 kVA with discrete interval capacity of 10 kVA.
Table 2.
Pollutant emission rate of different types of DGs.
Table 2.
Pollutant emission rate of different types of DGs.
| Generation type | Emission rate(kg/MWh) |
|---|
| NOx | CO2 | SO2 |
|---|
| WT | 0 | 0 | 0 |
| PV | 0 | 0 | 0 |
| MT | 0.52 | 502.6 | 3628.7 |
| Grid | 2.29 | 921.5 | 3.58 |
Table 3.
Environmental value standard and penalty for pollutant emissions.
Table 3.
Environmental value standard and penalty for pollutant emissions.
| Index | NOx | CO2 | SO2 |
|---|
| Environmental value ($/kg) | 1.00 | 0.002875 | 0.75 |
| Penalty ($/kg) | 0.25 | 0.00125 | 0.125 |
To find the effectiveness and improvement of the developed CSO-MCS algorithm, the test results are compared with those obtained by another algorithm named PSO-MCS in [
32]. All the experiments are implemented using Matlab2009b at a Core2 2.40-GHz machine with 2-GB RAM. The parameters of the algorithms are set as follows: In CSO-MCS, the horizontal crossover probability and vertical crossover probability are set as
Phc = 1 and
Pvc = 0.8 according to the suggestion in [
26]. In PSO-MCS, the acceleration coefficients are set to
c1 =
c2 = 0.8, the inertia weight is set to
w = 0.4 [
32]. In the two algorithms, the population sizes are set to
Npop = 50, the maximum number of iterations is set to
Itermax = 500, the sample sizes of Monte Carlo are set to
Ns = 500, other parameters are set to the same as those used in the optimization model. To reduce statistical errors, the test is repeated 30 times independently.
5.1. Case 1: IEEE 33-Bus System
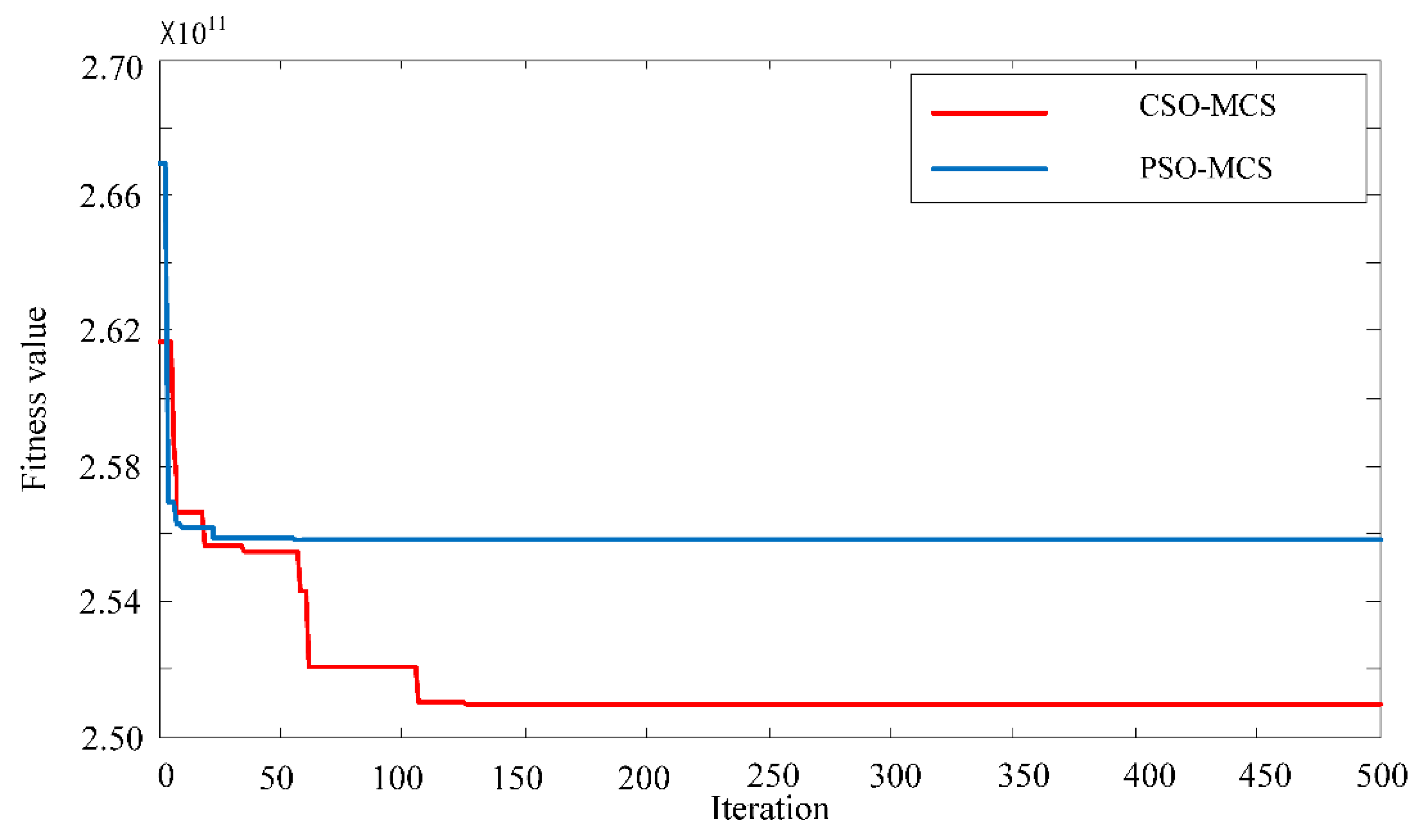
In this case, the typical 33-bus system is used to test the proposed method. The convergence characteristics of the developed CSO-MCS algorithm and PSO-MCS are illustrated in
Figure 3. From this figure, it can be seen that the PSO-MCS algorithm is fast in convergence. The iteration number required by PSO-MCS is only 57. However, the convergence accuracy is not entirely satisfactory. This is due to the shortcoming of PSO that is easily trapped in the local optimum and appeared premature convergence. As to CSO-MCS, the experimental results show that its iteration number is greater than PSO-MCS, while the optimal result of CSO-MCS is 1.88% better than that of PSO-MCS.
Figure 3.
Convergence characteristics of CSO-MCS and PSO-MCS (Case 1).
Figure 3.
Convergence characteristics of CSO-MCS and PSO-MCS (Case 1).
The simulation results including the pollutant emissions, the power losses cost, the total DG cost and the CPU time obtained by CSO-MCS and the compared algorithm are shown in
Table 4. The comparisons of statistics of the above indices, such as mean value, standard deviation, maximum and minimum value are presented as well. In terms of solution quality, we see that the mean pollutant emissions and power losses cost achieved by CSO-MCS is 25.08% and 14.40% less than those by PSO-MCS. The best fitness value CSO-MCS achieved is better than PSO-MCS as analyzed earlier.
These results demonstrate the effectiveness of the developed CSO-MCS algorithm in addressing DG allocation problems. With respect to the computing time, the mean CPU time of CSO-MCS is 227.02 s, which is 24.65% faster than PSO-MCS. In stability, we can see that the standard deviation of CPU time of CSO-MCS is 6.42 s, which is 47.38% less than PSO-MCS. Similar results can be found in other indices. For example, the standard deviation value of emissions index obtained by CSO-MCS is 68.89% less than that of PSO-MCS. These results show that CSO-MCS has good performance in robustness.
Table 4.
Results obtained by crisscross optimization algorithm and Monte Carlo simulation (CSO-MCS) and particle swarm optimization and Monte Carlo simulation (PSO-MCS) (30 runs for Case 1).
Table 4.
Results obtained by crisscross optimization algorithm and Monte Carlo simulation (CSO-MCS) and particle swarm optimization and Monte Carlo simulation (PSO-MCS) (30 runs for Case 1).
| Evaluation method | Pollutant emissions (105 t) | Power losses cost (105 $) | Total DG cost (106 $) | CPU time (s) |
|---|
| CSO-MCS | Maximum value | 1.0695 | 5.5983 | 3.8402 | 239.72 |
| Minimum value | 1.0599 | 5.1482 | 3.8367 | 215.34 |
| Mean | 1.0651 | 5.4601 | 3.8387 | 227.02 |
| Standard deviation | 0.0028 | 0.0417 | 0.000975 | 6.42 |
| PSO-MCS | Maximum value | 1.1152 | 6.1232 | 3.6945 | 350.64 |
| Minimum value | 1.0802 | 6.4685 | 3.6448 | 295.75 |
| Mean | 1.0925 | 6.3787 | 3.6716 | 301.27 |
| Standard deviation | 0.0090 | 0.0743 | 0.0157 | 12.20 |
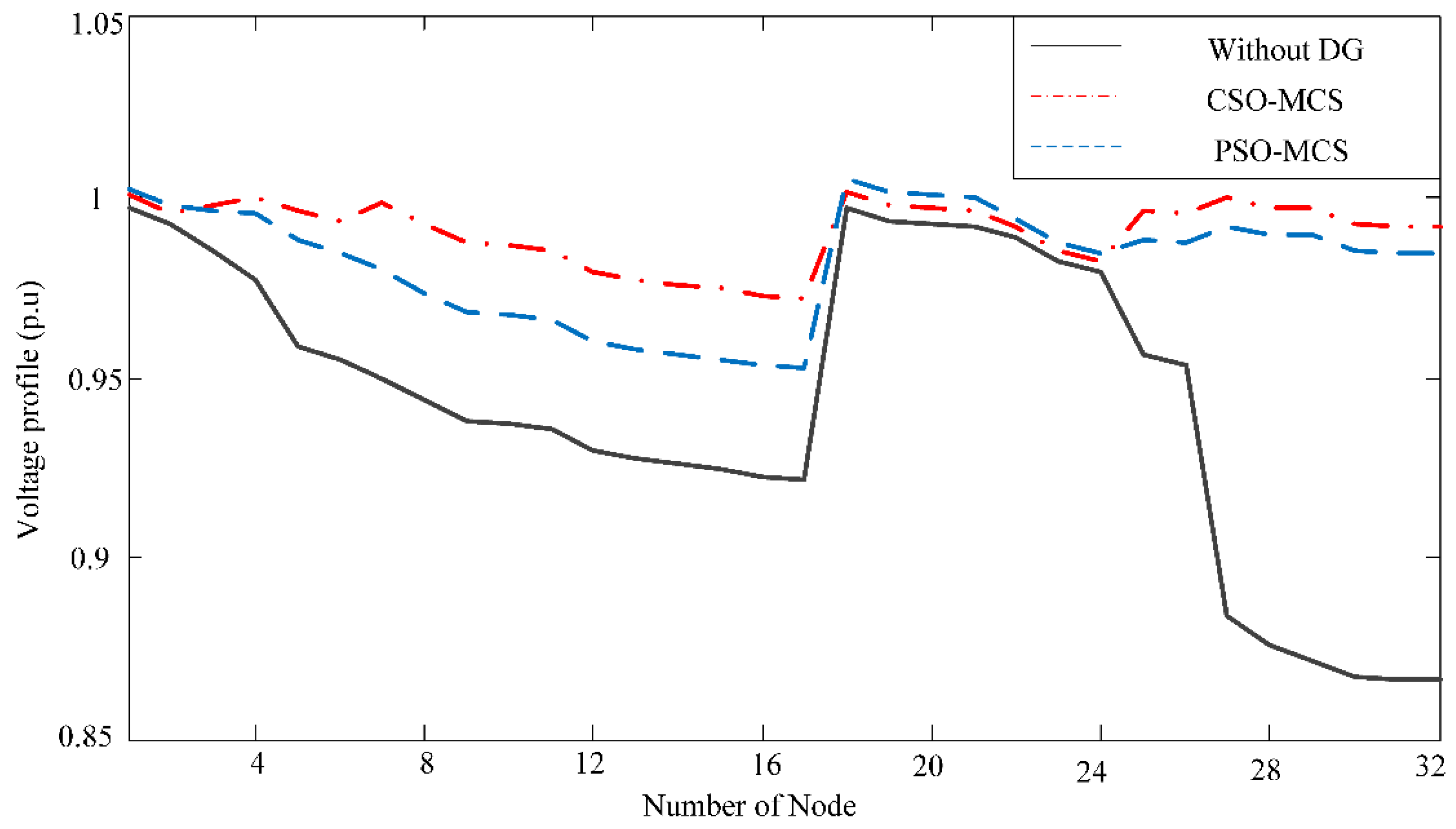
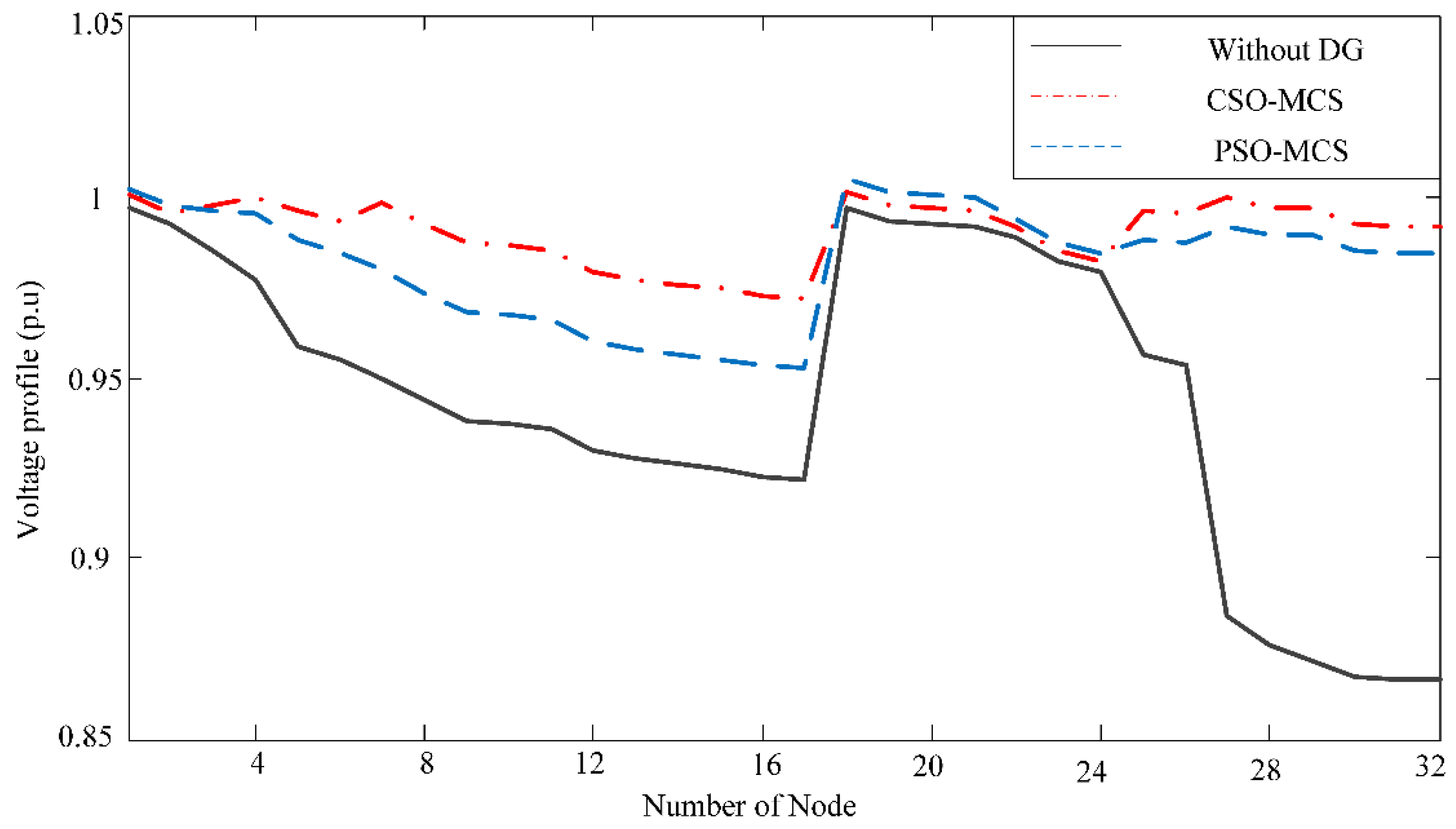
Figure 4 compares the voltage profiles of the 33-buses system before and after DG installation. The voltage profile is one of the main criterions for power quality improvement. As seen in
Figure 4, the voltage quality of the origin system is dissatisfactory. The voltage of many nodes, especially the end nodes like node-31 and node-32, is seriously below the permitted range. After installing DGs according to the optimal schemes, the voltage profile is obviously improved. It can be observed that both of the methods (
i.e., CSO-MCS and PSO-MCS) provide better voltage profile in the simulation. According to the statistical results, the average voltage deviation (AVD) of the scheme obtained by CSO-MCS and that by PSO-MCS is 0.00615 p.u and 0.01472 p.u, which present a reduction of 89.15% and 74.02% compare to the origin system. Meanwhile, we can see that the voltage profile obtained by CSO-MCS method is better than that by PSO-MCS in terms of average voltage deviation and voltage stability.
Figure 4.
Voltage profile contrast (Case 1).
Figure 4.
Voltage profile contrast (Case 1).
From the above analyses, we can draw a conclusion that CSO-MCS has good performance in terms of convergence accuracy and robustness, and it is suitable for solving DG allocation problems.
From the above simulation results, we can also evaluate the benefits brought about by optimal DG allocation. Before placing DGs in the distribution system, the emission of air pollutants is 1.3582 × 10
5 tons. After allocating DGs using CSO-MCS algorithm, a maximal reduction of 0.298 × 10
5 tons or approximately 21.96% of pollutant emissions can be achieved, as shown in
Table 4. The significant reduction in pollutant emission reveals the great contribution of DGs to environmental protection. In terms of power losses, after placing DGs, the system loss costs reduce from 7.8783 × 10
5 $ to 5.1482 × 10
5 $, which proves that reasonable application of DGs can effectively reduce the system network losses.
5.2. Case 2: PG&E 69-Bus System
A larger test system proposed in [
31] is considered in this case. The base power of this system is 10 MVA and the base voltage is 12.66 kV.
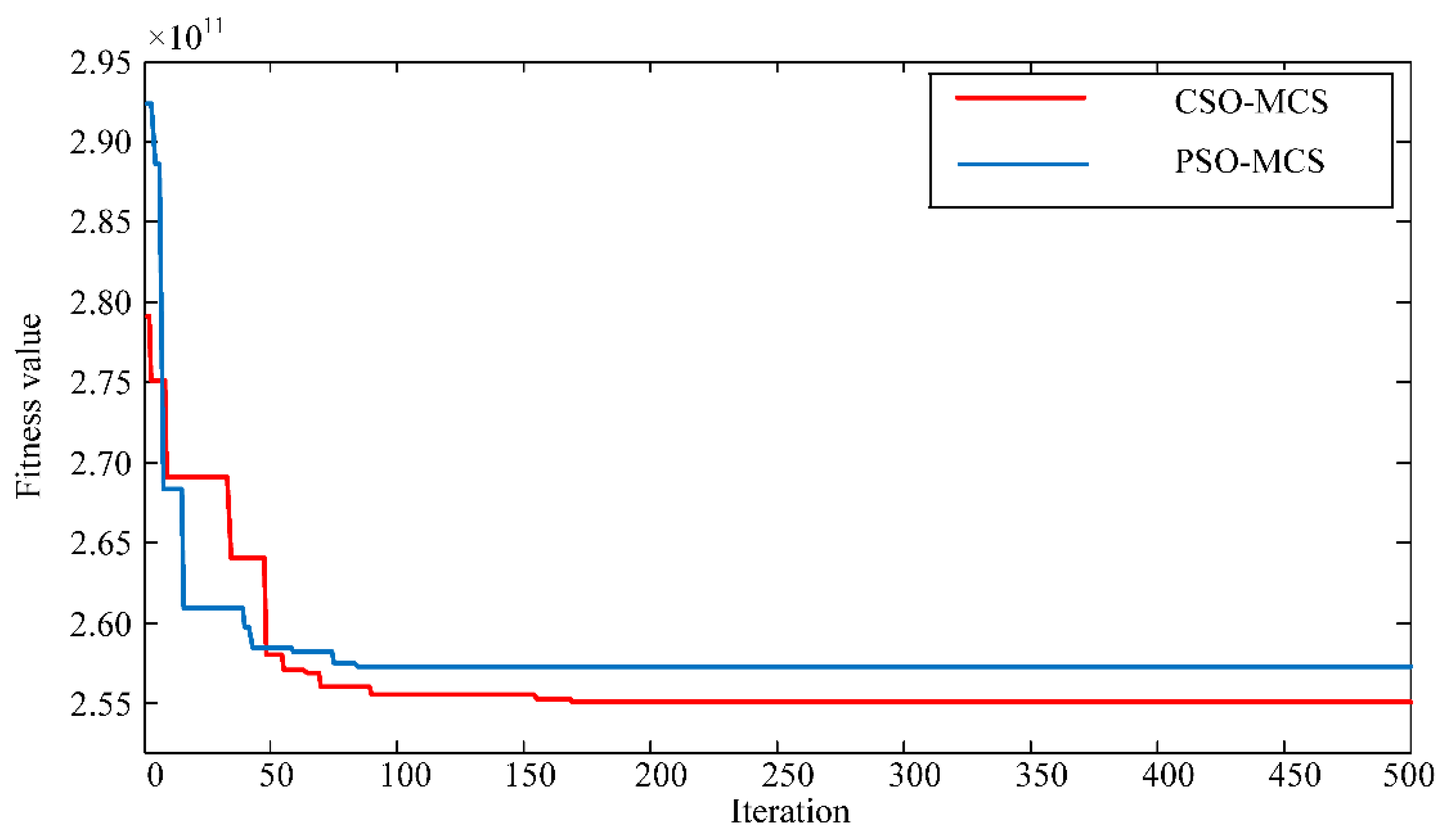
Figure 5 shows the convergence characteristics obtained by CSO-MCS and PSO-MCS. As shown in this figure, it is obvious that CSO-MCS outperforms PSO-MCS in terms of searching for better converged solutions. The optimal fitness value of CSO-MCS is 0.704% better than that of PSO-MCS.
The simulation results obtained by CSO-MCS are shown in
Table 5 and compared with the results of PSO-MCS. According to the results reported in
Table 5, it can be observed that CSO-MCS is capable of finding better solutions. The minimum of pollutant emission applying CSO-MCS is 1.0772 × 10
5 t, which is 0.706% less than the best results of PSO-MCS. Similar results can be found in the power losses cost index. As seen in
Table 5, the power losses cost achieved by CSO-MCS is 22.39% less than that by PSO-MCS.
Figure 5.
Convergence characteristics of CSO-MCS and PSO-MCS (Case 2).
Figure 5.
Convergence characteristics of CSO-MCS and PSO-MCS (Case 2).
Table 5.
Results obtained by CSO-MCS and PSO-MCS (30 runs for Case 2).
Table 5.
Results obtained by CSO-MCS and PSO-MCS (30 runs for Case 2).
| Evaluation method | Pollutant emissions (105 t) | Power losses cost (105$) | Total DG cost (106$) | CPU time (s) |
|---|
| CSO-MCS | Maximum value | 1.0859 | 5.8827 | 5.1555 | 589.92 |
| Minimum value | 1.0772 | 5.4875 | 5.0689 | 572.24 |
| Mean | 1.0820 | 5.7526 | 5.1121 | 583.92 |
| Standard deviation | 0.0027 | 0.0778 | 0.0272 | 5.16 |
| PSO-MCS | Maximum value | 1.1168 | 7.2021 | 4.2893 | 639.38 |
| Minimum value | 1.0848 | 6.7160 | 4.0818 | 595.26 |
| Mean | 1.1002 | 7.0458 | 4.1956 | 615.80 |
| Standard deviation | 0.0097 | 0.1041 | 0.0637 | 14.29 |
With respect to computing speed, the mean CPU time of CSO-MCS is 583.92 s, which is 5.46% less than that of PSO-MCS. Besides, it is worthwhile to note that CSO-MCS also shows good performance on robustness. It can be observed from
Table 5 that the standard deviation of emissions index achieved by CSO-MCS is 0.0027 × 10
5 t, whereas the standard deviation value obtained by PSO-MCS is 0.0097 × 10
5 t. In terms of other indices, the power losses cost index, total DG cost index and CPU time index achieved by the proposed algorithm are smaller than those achieved by PSO-MCS. The above analysis results of 69-bus test system further confirm the effectiveness and robustness of CSO-MCS in solving DG allocation problems.
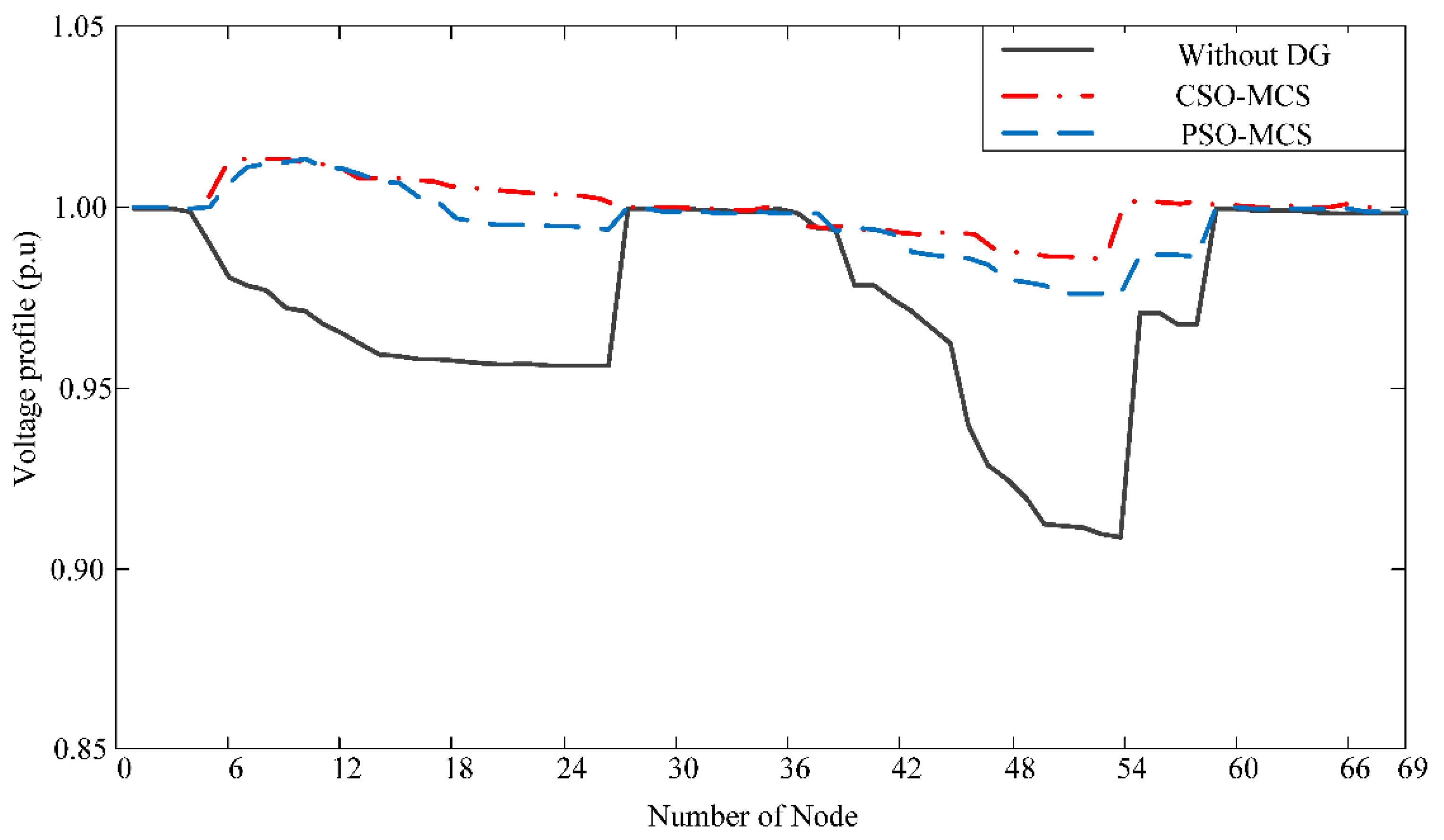
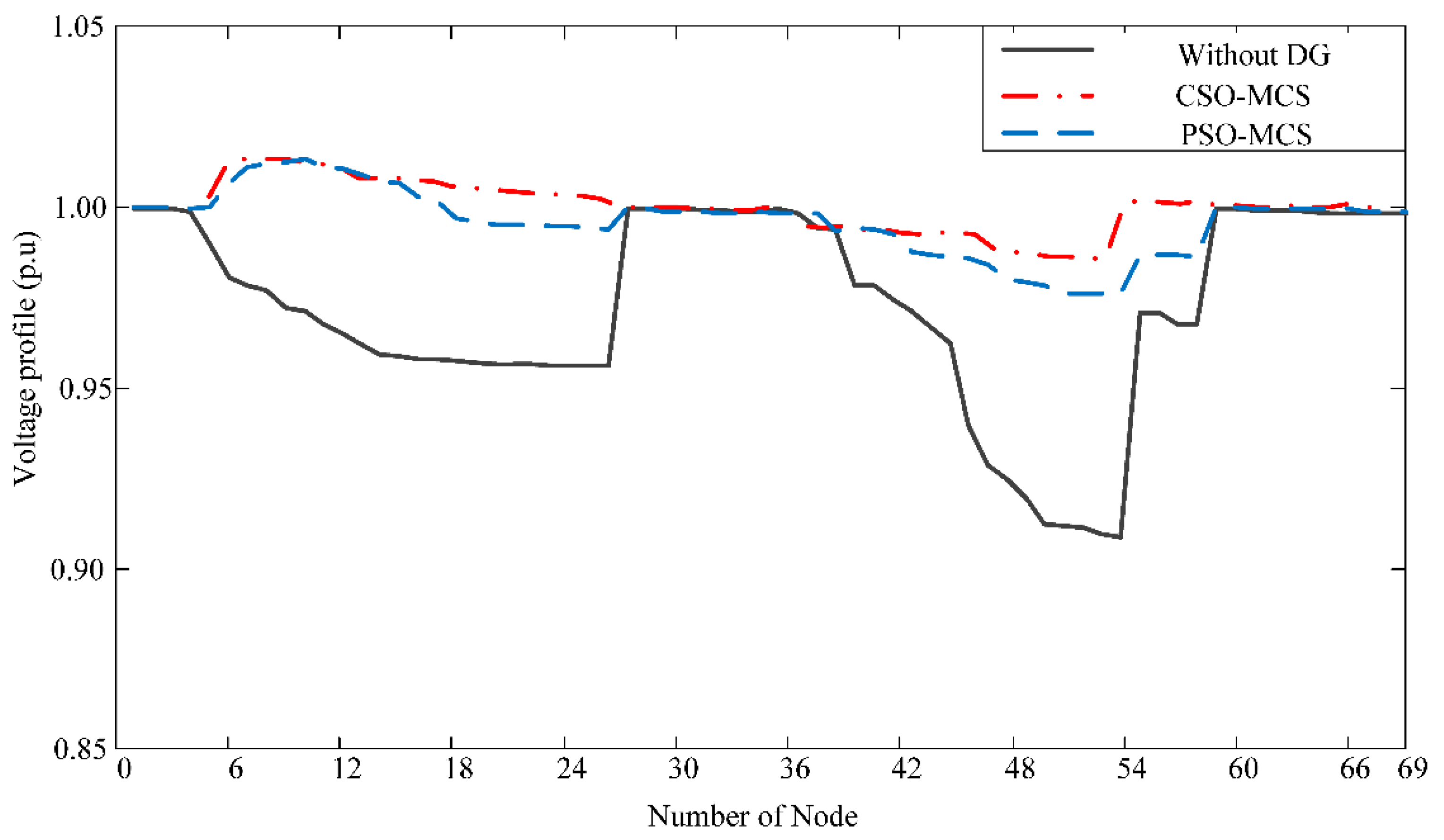
Figure 6 shows and compares the mean voltage magnitude of each node for the 69-bus system using different methods. From this figure, it can be observed that the voltage amplitude of many nodes of the origin system is seriously below the permitted range. After placing DGs using the optimization methods, we can see that a marked improvement in voltage profiles can be achieved. As seen in
Figure 6, before placing DGs, the original voltage magnitude of node 54 is 0.909 p.u. After optimizing DG allocation in the distribution system, the voltage magnitude of node 54 increases to 0.986 p.u. Similar results have been seen in other nodes. In addition, according to the statistical results, the average voltage deviation (AVD) obtained by CSO-MCS is 0.005 p.u, which has a reduction of 81.62% compare to the origin system. When comparing the voltage profiles obtained by the two algorithms (
i.e., CSO-MCS and PSO-MCS), we can see that the AVD achieved by CSO-MCS is also less than the results that of PSO-MCS (0.007 p.u), which also indicates the validity of CSO-MCS in solving ODGA problem.
Figure 6.
Voltage profile contrast (Case 2).
Figure 6.
Voltage profile contrast (Case 2).
5.3. Influence of Uncertainties of Renewable DGs
In order to investigate the effect of uncertainties of renewable energy on the planning results, two scenarios have been designed in
Table 6. The stochastic characteristics of renewable energy can be described by their probability density functions (PDF). In this simulation, we design two sets of PDF parameters of renewable energy (
i.e., shape and scale parameters of the Weibull distribution of wind speed; shape parameters of the Beta distribution of solar radiation). Scenario B shows higher level of wind speed and lower level of solar illumination in comparison to Scenario A. The results associated with the schemes for the 33-bus and 69-bus systems are shown in
Table 7 and
Table 8. With respect to the chance constraints of voltage amplitude and power flow, statistical results indicate that, for the 33-bus system, the probabilities of voltage chance constraint Pr{V
min ≤ V ≤ V
max} are 0.954 and 0.962; for the 69-bus system, the probabilities of voltage chance constraint Pr{V
min ≤ V ≤ V
max} are 0.937 and 0.942. In terms of the chance constraint of power flow, the probabilities Pr{S
ij ≤ S
max} are 0.922 and 0.937 for the 33-bus system; 0.920 and 0.929 for the 69-bus system. Both of the probabilities can satisfy the given value (
i.e., α = β = 0.9), so the optimization results are acceptable. Besides, from
Table 7, we can observe that the obtained results vary with the uncertain characteristics of renewable energy. The penetration of WT-based DG is increased from 300 kW (Scenario A) to 500 kW (Scenario B), whereas the installation of PV-based DG is decreased from 610 kW (Scenario A) to 370 kW (Scenario B). Similar change of optimization results appeared in the 69-bus system. The main reason for this change is due to the higher level of wind speed and the lower level of solar illumination intensity in Scenario B. Using the stochastic feeder loads, wind power outputs, photovoltaic power outputs and other data in
Table 1,
Table 2 and
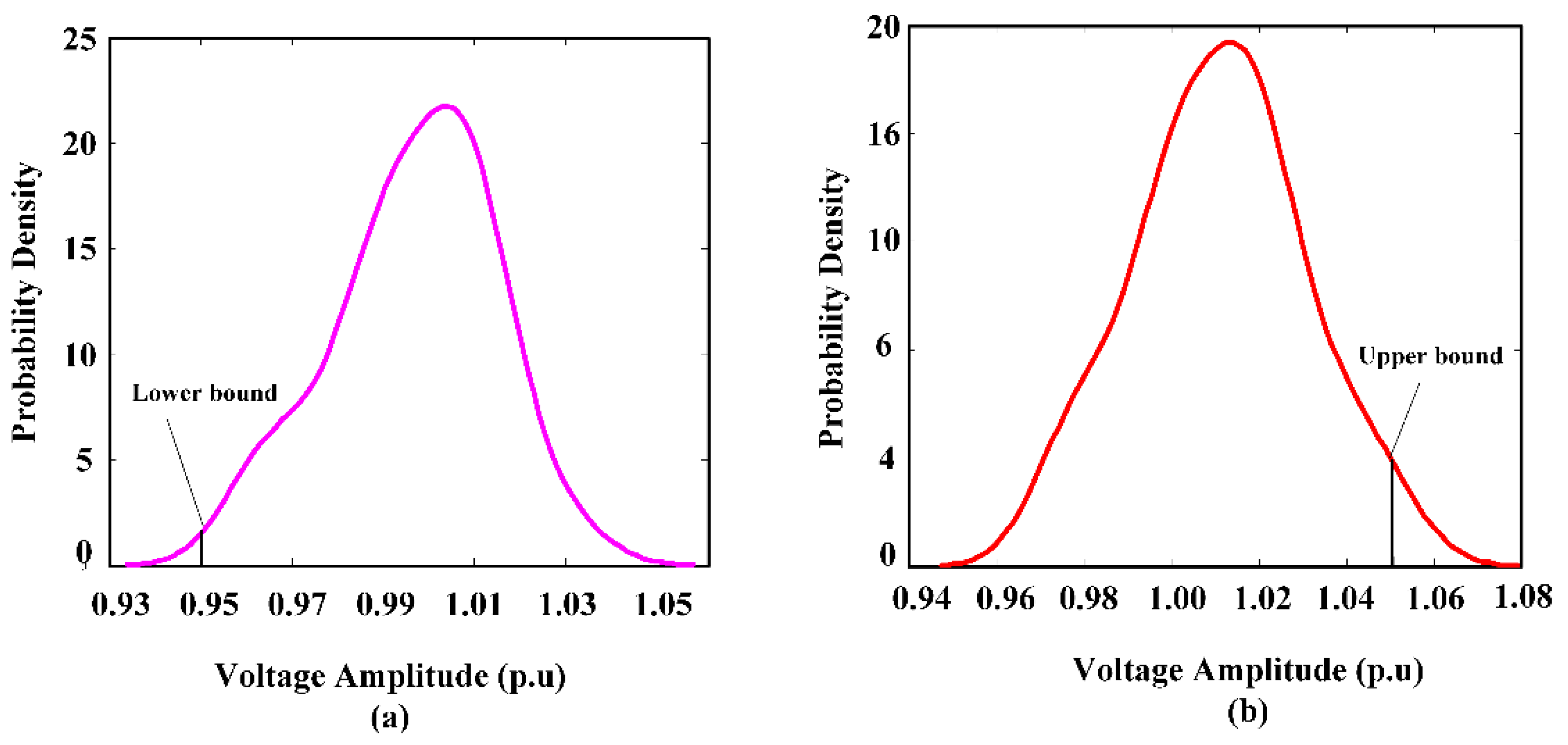
Table 3, the voltage distributions under different scenarios can be evaluated by using the proposed method. To investigate the variation of voltage profile of the distributed system caused by embedded renewable DGs, we select two representative nodes from the two test systems respectively, and draw their voltage probability density curves in
Figure 7,
Figure 8,
Figure 9 and
Figure 10. In the 33-bus system, one of the representative nodes is the 4th node, which has large sizes of DGs. Another is the 32nd node, which has no DGs and locates at the end of the system. In the 69-bus system, the representative node with large capacity of DGs is the 14th node, and the other node without DGs is the 50th node.
Table 6.
Definition of two scenarios.
Table 6.
Definition of two scenarios.
| Scenario | Wind speed parameters | Solar radiation parameters |
|---|
| A | k = 1.80, c = 6 | α = 2.0, β = 2.0 |
| B | k = 2.15, c = 9 | α = 0.9, β = 0.9 |
Table 7.
Optimization results of different scenarios (33-bus system).
Table 7.
Optimization results of different scenarios (33-bus system).
| DG type | Candidate location | DG sizes (kW) |
|---|
| Scenario A | Scenario B |
|---|
| WT | 4 | 120 | 200 |
| 18 | 180 | 300 |
| 25 | 0 | 0 |
| 32 | 0 | 0 |
| PV | 4 | 220 | 120 |
| 7 | 200 | 150 |
| 25 | 100 | 40 |
| 29 | 90 | 60 |
| MT | 4 | 120 | 40 |
| 7 | 80 | 120 |
| 17 | 150 | 50 |
| 29 | 0 | 40 |
Table 8.
Optimization results of different scenarios (69-bus system).
Table 8.
Optimization results of different scenarios (69-bus system).
| DG type | Candidate location | DG sizes (kW) |
|---|
| Scenario A | Scenario B |
|---|
| WT | 14 | 150 | 100 |
| 20 | 30 | 0 |
| 26 | 0 | 20 |
| 46 | 80 | 20 |
| 49 | 60 | 30 |
| 52 | 120 | 80 |
| 53 | 200 | 120 |
| PV | 14 | 100 | 200 |
| 20 | 0 | 40 |
| 26 | 0 | 0 |
| 46 | 20 | 50 |
| 49 | 50 | 90 |
| 52 | 100 | 170 |
| 53 | 100 | 150 |
| MT | 14 | 150 | 90 |
| 20 | 0 | 20 |
| 26 | 10 | 0 |
| 46 | 0 | 0 |
| 49 | 60 | 80 |
| 52 | 150 | 100 |
| 53 | 100 | 80 |
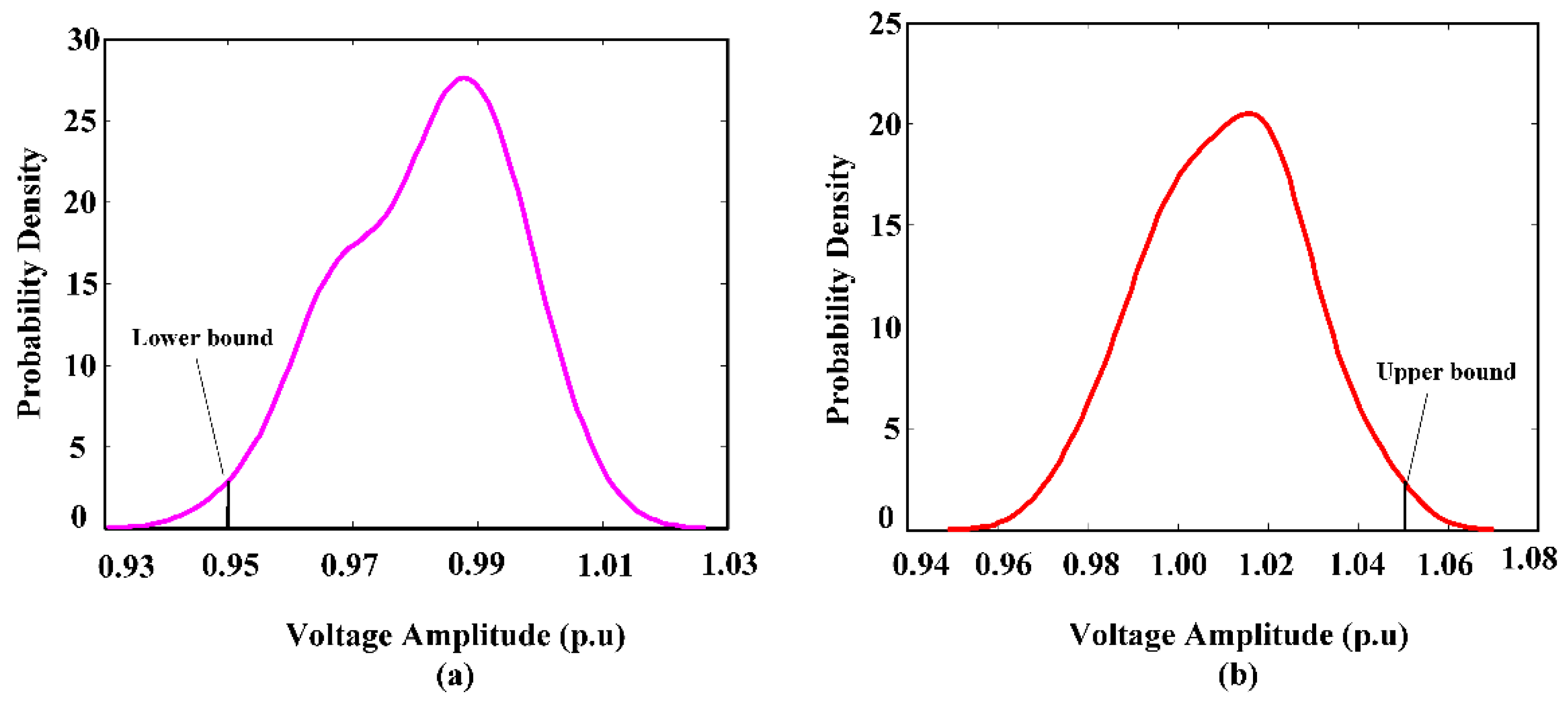
Figure 7.
PDF curve of voltage amplitude in Scenario A of 33-bus system: (a) Node 32 and (b) Node 4.
Figure 7.
PDF curve of voltage amplitude in Scenario A of 33-bus system: (a) Node 32 and (b) Node 4.
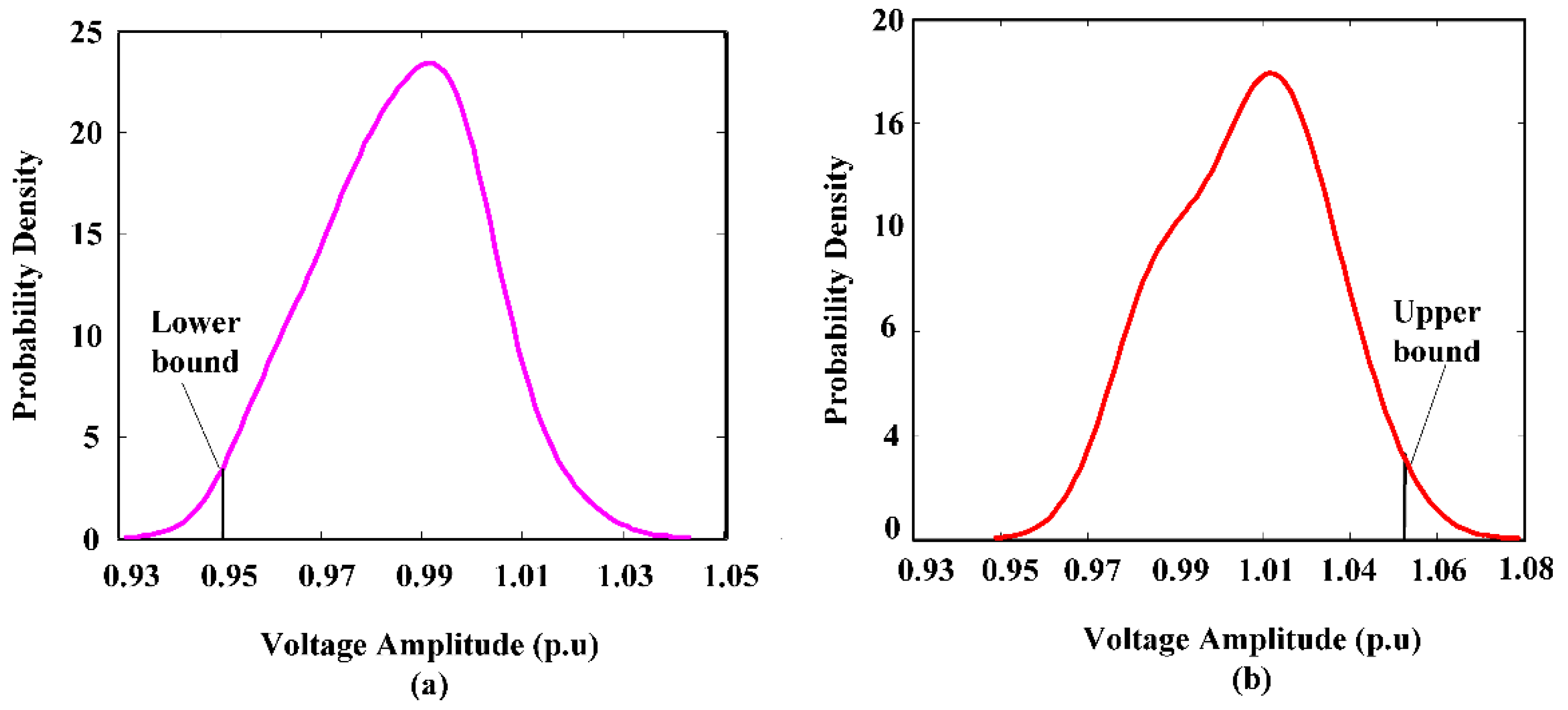
Figure 8.
PDF curve of voltage amplitude in Scenario B of 33-bus system: (a) Node 32; (b) Node 4.
Figure 8.
PDF curve of voltage amplitude in Scenario B of 33-bus system: (a) Node 32; (b) Node 4.
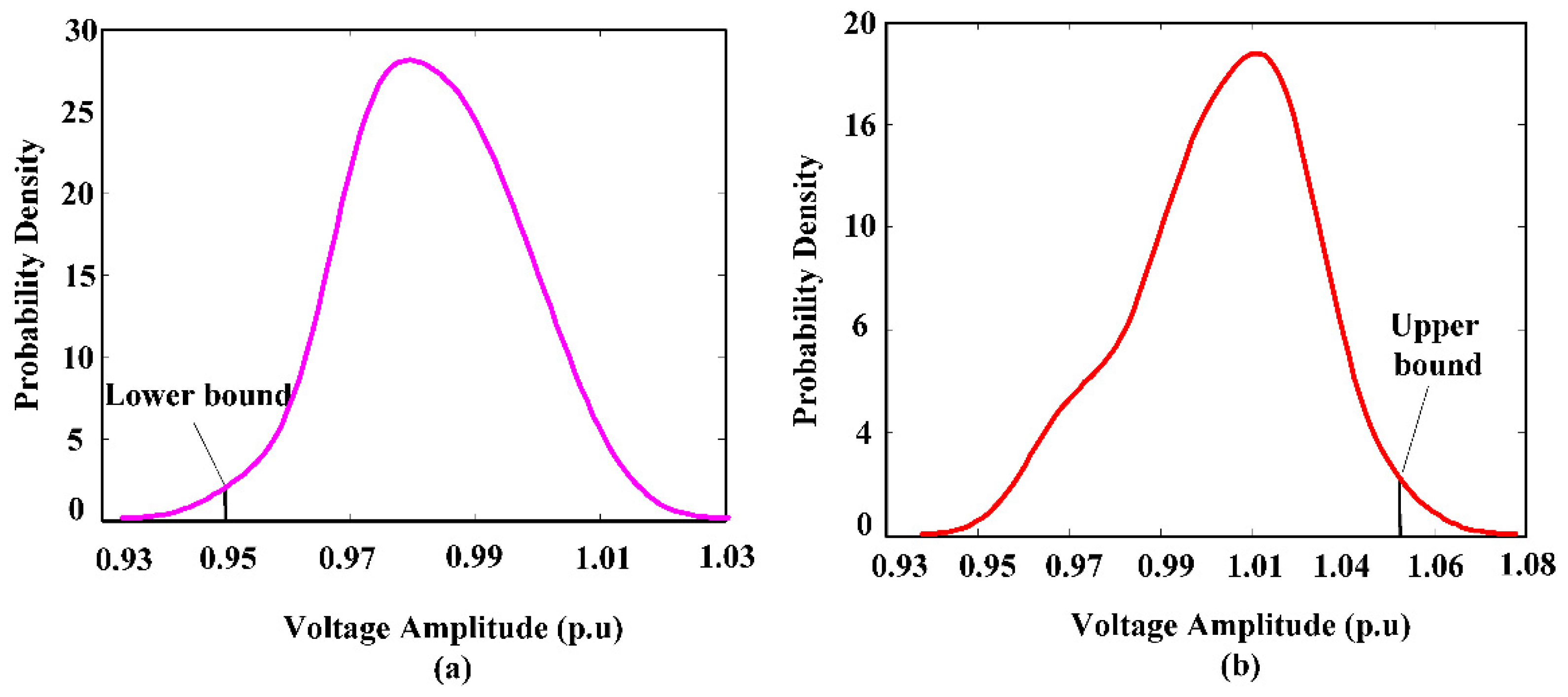
The voltage probability density curves of node 4 and node 32 indicate that the voltage profile is obviously improved after placing DGs properly. From
Figure 7 to
Figure 10, we can see that in most cases of the 33-bus system, the voltage of node 32 distributes between 0.98 p.u and 1.00 p.u, and the voltage of node 4 distributes between 0.99 p.u and 1.03 p.u. As for the 69-bus system, we can observe that the voltage of node 50 distributes between 0.985 p.u and 0.995 p.u, and the voltage of node 14 distributes between 0.98 p.u and 1.02 p.u. Both of them are within the allowable range for power systems to ensure the operation safety. However, it is worthwhile to note that the voltage amplitudes of the two nodes may sometimes exceed the limitation, due to the intermittent of DG power supply. Thus, for those important customers whom are sensitive to voltage quality and locate close to DG connected nodes, it is necessary to make measures to keep stable voltage quality.
Figure 9.
PDF curve of voltage amplitude in Scenario A of 69-bus system: (a) Node 50 and (b) Node 14.
Figure 9.
PDF curve of voltage amplitude in Scenario A of 69-bus system: (a) Node 50 and (b) Node 14.
Figure 10.
PDF curve of voltage amplitude in Scenario B of 69-bus system: (a) Node 50 and (b) Node 14.
Figure 10.
PDF curve of voltage amplitude in Scenario B of 69-bus system: (a) Node 50 and (b) Node 14.
6. Conclusions
Integration of distributed generations into the distribution system may change various operating characteristics of the system, especially at increased penetration of renewable DGs like wind power and photovoltaic generation. This paper has proposed a novel approach integrating crisscross optimization algorithm and Monte Carlo simulation called CSO-MCS is proposed to effectively obtain the best sizes, locations and types of DGs in the distribution system. The proposed CSO-MCS method is compared with PSO-MCS in terms of convergence and computation time to demonstrate its effectiveness and feasibility. Furthermore, an optimization framework for optimal DG allocation problem using chance constrained programming (CCP) is presented in this paper. The objective functions encompass minimization of total pollutant emission, DG cost and active power losses over the planning period. In order to assure the feasibility of planning results, the system uncertainties covering wind speed, solar radiation and load consumption are taken into account using their probabilistic models.
This proposed work can help the system operators in evaluating DG allocation schemes to decide the best feasible solution for practical implementation and enable them to evaluate the impact of system uncertainties on DG planning work. As future work, we are preparing to apply CSO-MCS to address more practical ODGA problems considering reliability impacts and other factors, then conduct a research on the system operation and energy management of a smart distribution grid connecting large numbers of DGs and PEVs.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}