1. Introduction
There exist more and more proposals to organize some parts of the power system as microgrids (MGs), in particular in rural or island regions. A microgrid can be defined as a weak electric grid formed by different renewable sources, auxiliary sources, energy storage systems, power converters, loads and control systems. Generally, microgrids are not opposite but complementary to the interconnected power system. They can be as efficient and self-sufficient as possible, and they can island rapidly during emergencies [
1]. However, when operating in islanded mode, they become weak grids and are thus less stable and more vulnerable to variable sources and loads.
Many different issues concerning control in islanded MGs can be found in the scientific literature. One of them concerns frequency regulation. For instance in [
2], the increase of the frequency stability of islanded microgrids during both primary and secondary frequency control is carried out through a cooperative frequency control method. In [
3], single master and multi master operations are tested. Simulation results show that both control strategies are effective and ensure efficient and stable MG operation.
Another typical issue is related to power quality. In [
4], two improved control strategies associated to a three-phase, four-leg distributed generation grid-interfacing converter, are proposed. They have the capacity to compensate current harmonic, provide proper power sharing in the MG, reduce the degree of voltage unbalance and eliminate the impact of voltage sags, voltage swells, and distortions in the utility grid on the micro-grid when transitioning from grid-connected mode to islanded mode. The voltage unbalance issue is also considered in [
5], where the distributed generation units are operated by the voltage-based droop control and an additional control loop for unbalance mitigation and sharing.
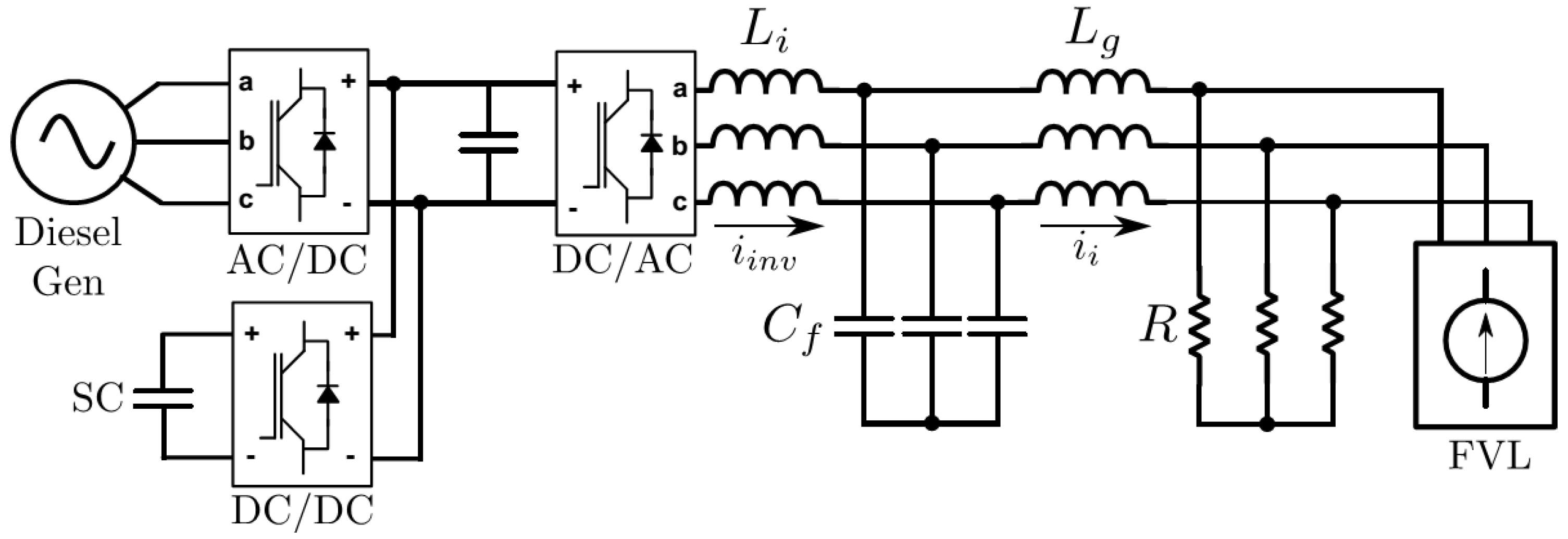
The aim of this research study is to design robust controllers to control, via an inverter associated to an inductance-capacitor-inductance (LCL) filter, the voltage of a mostly resistive isolated microgrid disturbed by Fast Varying Loads (FVL) (see
Figure 1).
Most of the elements of a microgrid are interconnected through power converters, which allow controlling the power flow of each element. In this context, inverters play a vital role in order to keep the stability of the microgrid. An inverter can use different types of passive filters to eliminate the harmonics generated by the commutation. Mainly three types of filters are used, inductance (L), inductance-capacitor (LC) or LCL [
6].
The L filter is the simplest one from the point of view of the design and control. However, if the power is higher than several kilowatts, the value of the inductance should be high enough to eliminate the harmonics and therefore the price would be high too [
7]. Furthermore, a high inductance would deteriorate the dynamic response of the system and due to the high voltage loss it would be necessary to increase the direct current (DC) bus voltage [
8].
A capacitor may be connected in parallel with the inductance to form an LC filter, which allows reducing the size of the inductance. However, the value of the capacitor should be high enough to reduce the size of the inductance, which is not recommended due to the high inrush currents and high reactive currents that it would generate as well as the dependence of the filter on the grid impedance [
9].
The LCL filter is the most used one as it has a good harmonic attenuation using low size, and therefore low price, passive elements in comparison with the other types of filters. Besides, the dependence on the grid impedance is lower than in the case of the LC filter [
9]. However, this kind of filter usually makes its electrical variables being oscillatory. This fact has to be considered when designing the inverter controller.
The design of the controller of an inverter that uses an LCL filter is carried out in several research works assuming that the effect of the capacitor is low enough to neglect it, knowing that due to the bandwidth of the controller, it only affects to the current harmonics of low order [
10,
11]. In these references, once a proportional-integral (PI) type controller is designed, its stability is analyzed using the complete dynamic model of the LCL filter. Passive [
7] or active [
12] damping methods are used to minimize the effect of the inherent resonance of the filter.
The control of the inverter is generally based on two regulation loops, an inner one of current (the current of the converter or alternatively the current of load side inductance is controlled by this loop) and an external one of voltage or power (the one of converter or load side). If the current of the converter side inductance is controlled, the obtained system is more stable than the system obtained controlling the load side inductance current. The feedback of the converter side inductance current inserts an attenuation of the resonance of the filter [
13]. However, if the objective of the outer loop is to control the voltage or the power of the load, this strategy implies that the outer loop control model has also a resonance.
In this work the inner loop has been designed to control the current of the load side inductance, and the outer loop to control the voltage of the microgrid. As analyzed in
Section 2, the isolated/islanded nature of the microgrid induces a nonlinear behavior of the plant. To face this non-linearity, on top of a robust controller, an adaptive/gain scheduling (GS) controller is designed. The main objectives of these controllers are to damp the oscillating dynamic of the plant, to reject disturbances and to obtain robustness in stability, dynamic characteristics and in stability margins on the entire operation zone of the plant.
The remainder of this paper is organized as follows:
Section 2 describes the considered microgrid and the current disturbances occurring there, the dynamic model of the plant and an analysis of the nonlinearity of the model.
Section 3 explains the design of the two controllers of the inverter.
Section 4 shows and analyses some simulation results carried out to test the quality of the designed controllers. Finally,
Section 5 gives the conclusions related to this work.
3. Controller Design
This section presents the way the two controllers compared in this paper are designed. The first is defined as the “Robust controller”. The second one is an improved controller containing a GS strategy.
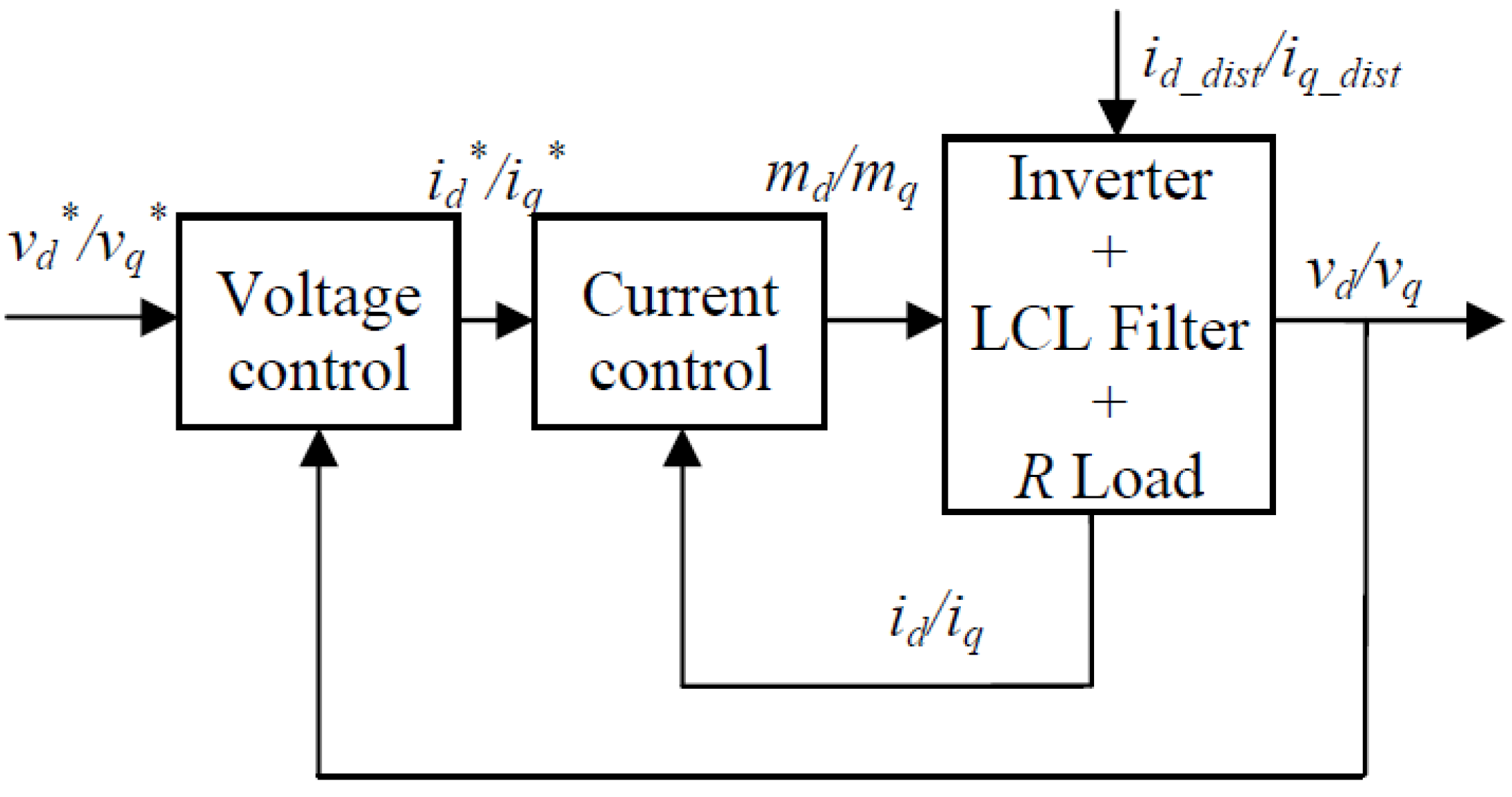
Both controllers are based on two loops in cascade, as depicted in
Figure 4. The inner loop controls the LCL filter output current in
d and
q axes through the duty cycle signals
md and
mq.
id_dist and
iq_dist represent the plant output disturbance current, specially generated by the FVL, in
d and
q axes. The inner control law design is described in
Section 3.1.
The outer loop regulates the inverter filter output voltage in
d and
q axes, generating
id* and
iq* current references for the inner loop. The related control law design is described in
Section 3.2.
Figure 4.
Controllers structure in the dq reference axes.
Figure 4.
Controllers structure in the dq reference axes.
3.1. Current Loop
3.1.1. Control Objectives
The controller of the current loop aims to control
id and
iq through
md and
mq control signals. As seen in
Section 2.3, the plant has an oscillating behavior. The desired dynamical performances are defined in order to damp this behavior, and to obtain a response as fast as possible to reject the output current disturbances. Regarding static specifications, no static error is desired in response to a step of reference and disturbance. As seen in the analysis carried out in
Section 2.3, the plant behavior is nonlinear in the operating zone. Thus, another objective of the controller is to be robust enough in stability in the whole zone, with a modulus margin upper than −6 dB and a delay margin higher than one sample time. On top of these specifications, the GS controller aims also to keep a similar settling time in the whole operating zone.
3.1.2. Control Model
A continuous-time plant model has been obtained analytically in
Section 2.2. The control model is calculated digitizing the continuous transfer functions. For that, the sampling time is selected in order to respect two conditions:
where
fs is the sampling frequency and
fBW_CL is the CL bandwidth.
As seen in
Section 2.3, the maximum resonance frequency of the plant in the operating zone is 1.4 × 10
4 rad/s. Taking a sampling time of
Ts = 2 × 10
−4 s equivalent to a sampling frequency of 3.14 × 10
4 rad/s, the first condition is fulfilled.
Concerning the second condition, fBW_CL depends on the tuning of the controller which will be carried out by trials and errors in order to fulfill all the dynamical and robustness specifications. Thus, this second condition will be verified later, during the controller adjustment.
On the other hand, the operating point of the nominal control model has to be chosen for the robust controller. The analysis carried out in
Section 2.3 has demonstrated that the maximum gain of the plant corresponds to the nominal power production, when the resistive load value is
R = Rnom. If the Robust controller is designed through this nominal control model, it will also be robust in the other operating points, because the gain in these points is lower at all frequencies.
With regard to the dynamical behavior, given this lower gain, the CL system will be slower in the other operating points. In any case, resonance frequency being very similar in the whole operating zone, the CL system should be damped in the whole zone if the controller is designed appropriately in the nominal operating point.
The continuous-time plant model in this nominal point is obtained replacing the parameters of Equation (7) with the values given in
Table 1 and
R =
Rnom = 79.35 Ω. It is represented in its monic form:
The digitalized transfer function with the aforementioned specified sampling time is:
This transfer function contains two stable zeros (inside the unitary circle of
z plane): −0.7259 and −0.1338. Consequently, the numerator of the control model can be canceled out through the controller. Thus, the “tracking and regulation with independent objectives with sensitivity function shaping” method [
16] can be used here to design the controllers.
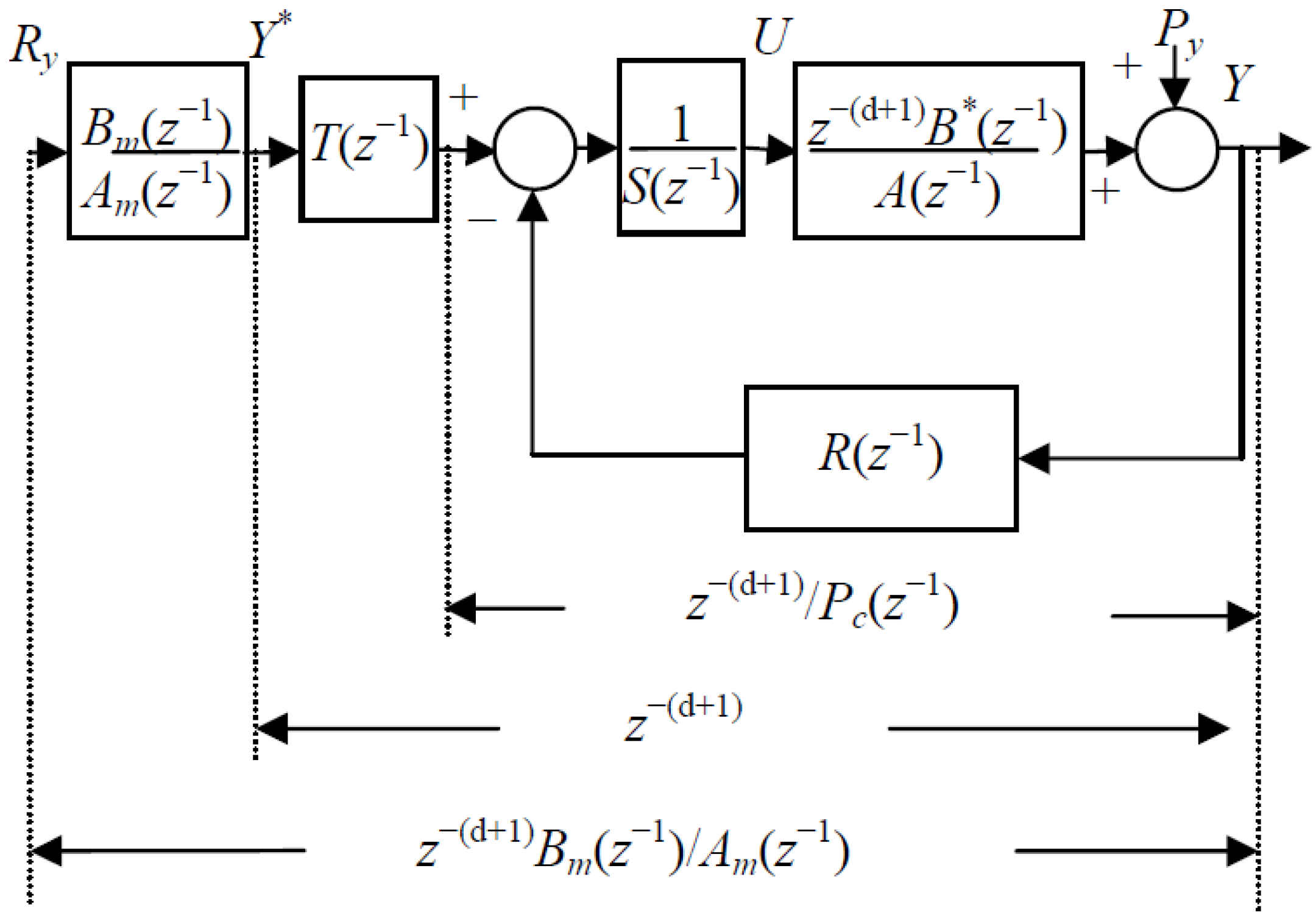
3.1.3. “Tracking and Regulation with Independent Objectives with Sensitivity Function Shaping” Method
The method contains two different steps [
16]. Firstly, the controller is designed in order to adjust the desired behavior in regulation through
R and
S polynomials (see
Figure 5). Secondly, the tracking behavior is adjusted through
T,
Am and
Bm. polynomials. In
Figure 5,
A and
B (
B* without the digitizing delay) represent respectively the denominator and the numerator of the plant.
d is the delay expressed in number of samplings (here
d = 0). Concerning the different signals,
Y is the output of the plant,
Y* the output reference,
U the control signal,
Py the disturbance applied to the output of the plant and
Ry the reference signal before the reference model which is defined by
Am and
Bm polynomials. Finally,
Pc is the characteristic polynomial of the CL system.
Figure 5.
Block-diagram of a RST digital controller.
Figure 5.
Block-diagram of a RST digital controller.
With respect to the behavior in regulation, knowing the plant model (
A,
B and
d) and the desired specifications (
Pc_des), the expression of
R and
S polynomials have to be found in order to fulfill the following relation:
Pre-specifications can be introduced through
S and
R polynomials. Thus, generally, these polynomials are written as follows:
For instance, to obtain a zero static error in response to a step, as the plant has no integrator, one must be introduced in the controller. This is obtained taking:
The desired characteristic polynomial
Pc_des contains dominant poles included in
Pd and auxiliary fast poles (non-dominants) included in
Pf polynomial. Moreover, in this method, in order to cancel out the plant transfer function numerator,
B* is included in
Pc_des:
This way, as it can be seen in Equation (15), the resolution of this equation leads to the presence of
B* in
S, and consequently, to its canceling out (the canceling out of
B* can also be carried out introducing it in
HS, instead of
Pc, and thus simplifying Equation (12) [
16]).
Pre-specifications of
S and
R polynomials, as well as
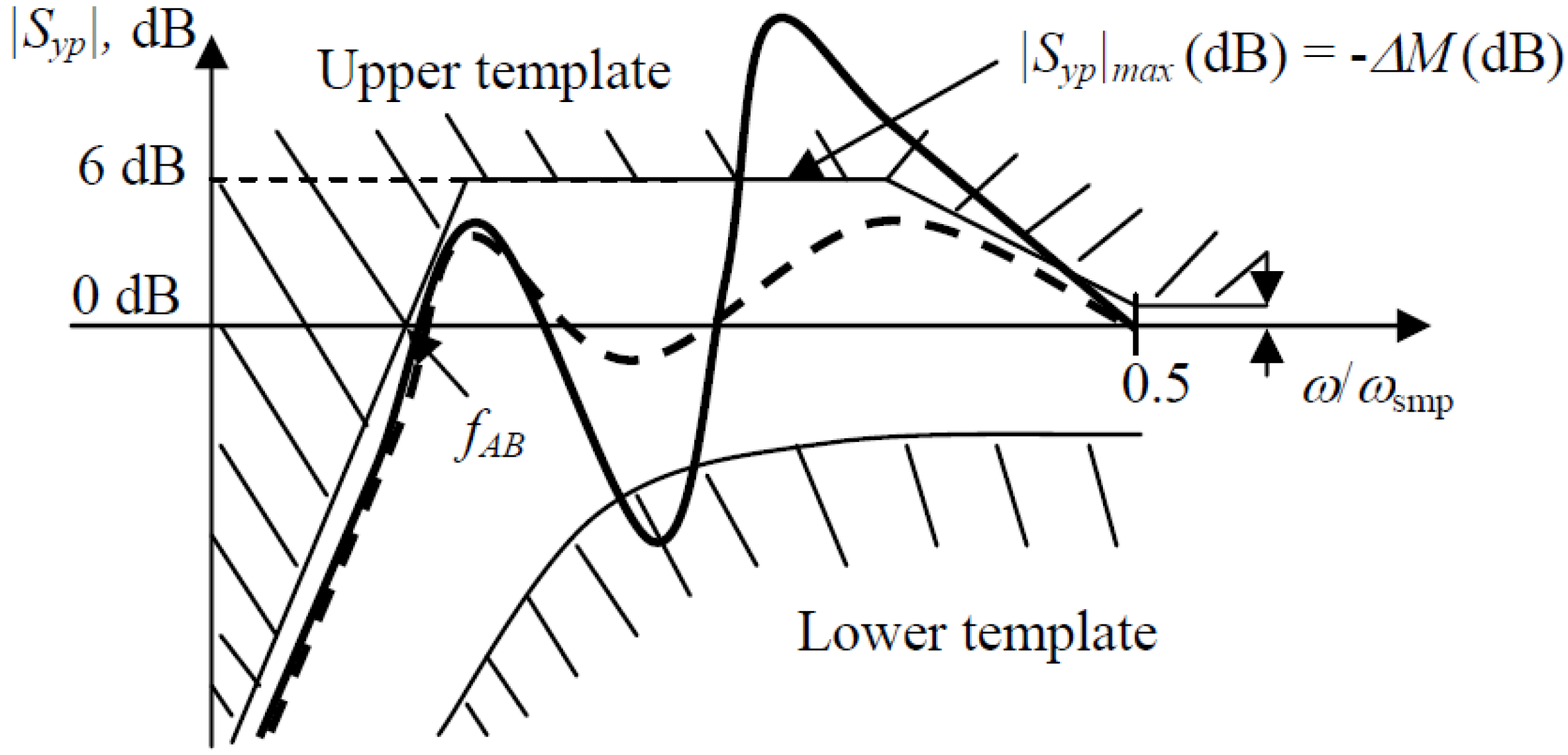
Pf polynomial can be also used to adjust the robustness of the controller. The modulus and delay margins, ∆
M and ∆τ, are better robustness indicators than gain and phase margins [
16]. The modulus margin is related to the maximum gain of the sensibility function
Syp between the output disturbance and the output. The delay margin is also linked to this transfer function. Thus, robustness specifications are generally set defining a template for the Bode magnitude diagram of
Syp, as shown in
Figure 6.
Figure 6.
Template of the Bode magnitude diagram of the sensitivity function Syp.
Figure 6.
Template of the Bode magnitude diagram of the sensitivity function Syp.
The maximum of
Syp must be lower than 6 dB. This fulfillment ensures a modulus margin higher than −6 dB. Moreover, the magnitude of
Syp has to be rather close to 0 dB in high frequencies in order to ensure a delay margin higher than a sampling period [
16]. This template allows also specifying the speed of the system behavior in regulation, through the adjustment of the attenuation band frequency
fAB.
One property of the sensitivity function says that “for asymptotically stable CL, and stable open loop, the integral of the logarithm of the modulus of the sensitivity function
Syp form 0 to 0.5
fs is zero”. This means that if changing the controller parameters the gain of
Syp increases in some frequencies, it decrease in other ones. For that reason, a lower template is also defined for
Syp, as can be seen in
Figure 6. The tuning of the controller in order to fulfill the specifications consists in adjusting the Bode magnitude diagram of
Syp through
HS,
HR and
Pc_des, in order to enter it in the defined template. Regarding the tracking behavior design, in this method,
T is used to cancel out the regulation dynamics (
Figure 5), taking
T =
Pc = PdPf. Once the regulation dynamics are canceled out, the tracking dynamics is tuned through
Am and
Bm polynomials related to the reference model.
3.1.4. Robust Controller Design and Adjustment
In a first step, the desired dominant poles included in
Pd are specified with a damping factor ξ = 0.7 and a settling time
ts (5%) = 1 ms. Moreover, in order to fulfill the specification related to the static behavior, an integrator is included in
HS. The other polynomials (
HR and
Pf) are taken equal to 1.
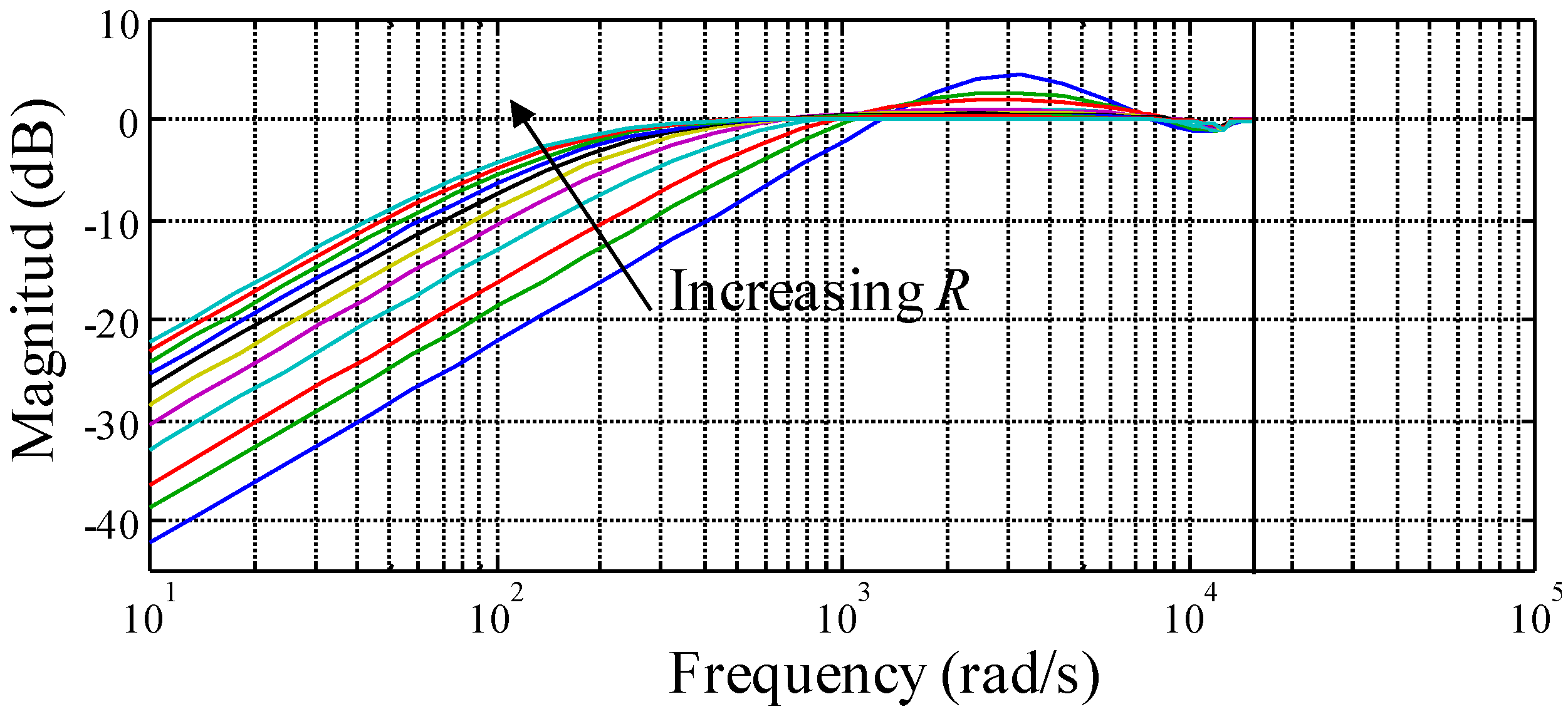
Figure 7 shows the obtained
Syp Bode magnitude diagram.
The obtained modulus margin is too low (∆
M = −11.88 dB). It is also observed that the gain is very small in high frequencies. Thus, two slightly damped auxiliary poles (ξ = 0.16) are introduced in high frequencies (ω
n = 1.45 × 10
4 rad/s), increasing the gain in high frequencies and thus decreasing the gain in medium frequencies and raising the modulus margin. With this new tuning, the robustness margin takes the following values: ∆
M = −4.42 dB and ∆τ = 3.94
Ts (see also
Figure 7).
Figure 7.
Bode magnitude diagram of Syp of the Robust current controller at different operating points.
Figure 7.
Bode magnitude diagram of Syp of the Robust current controller at different operating points.
The adjustment of the controller being appropriate, the aforementioned second condition related to the sampling time can be verified. With the tuned speed, the sampling frequency is 10 times higher than the desired CL bandwidth. Thus, the second condition is fulfilled.
A study of the CL system in regulation in the other operating points is carried out.
Figure 7 shows, as it was supposed, that the attenuation band is lower when the resistance increases, while the robustness margins are higher. Thus, this way, the stability and robustness in stability are ensured in the whole operating zone. Regarding the tracking dynamics, the reference model is chosen as a first order with unitary static gain and a settling time of
ts (5%) = 1 ms.
3.1.5. Gain Scheduling Controller Design
Different kinds of GS strategies exist [
17]. The first types of methods are based on a Linear Parameter-Varying description of the plant. They ensure global properties of the CL system. The second class of methods consists in computing a set of local controllers on a bank of linearized models. This second method provides control systems which only ensure local properties. Consequently, global stability and global performance have to be checked
a posteriori, generally through simulations.
In this study the used method has been the second type one. Considering the study carried out in
Section 2.3, the load resistance is chosen as scheduling parameter. It is estimated through filtered current and voltage measures at the inverter filter output.
Nine operating points are considered, those corresponding to Rnom, 1.5 Rnom, 2 Rnom, 3 Rnom, 4 Rnom, 5 Rnom, 6 Rnom, 8 Rnom and 10 Rnom. The scheduling regions are delimited in function of these points. For the identification of the scheduling region, a hysteresis filter is applied to the estimated load in order to avoid unnecessary switching.
A controller is designed for each considered operating point following the same aforementioned methodology, through the digital control model obtained in each operating point. The specifications are the same as those of the Robust controller. Only
Pf polynomial is changed in order to obtain the best robustness margins in each operating point.
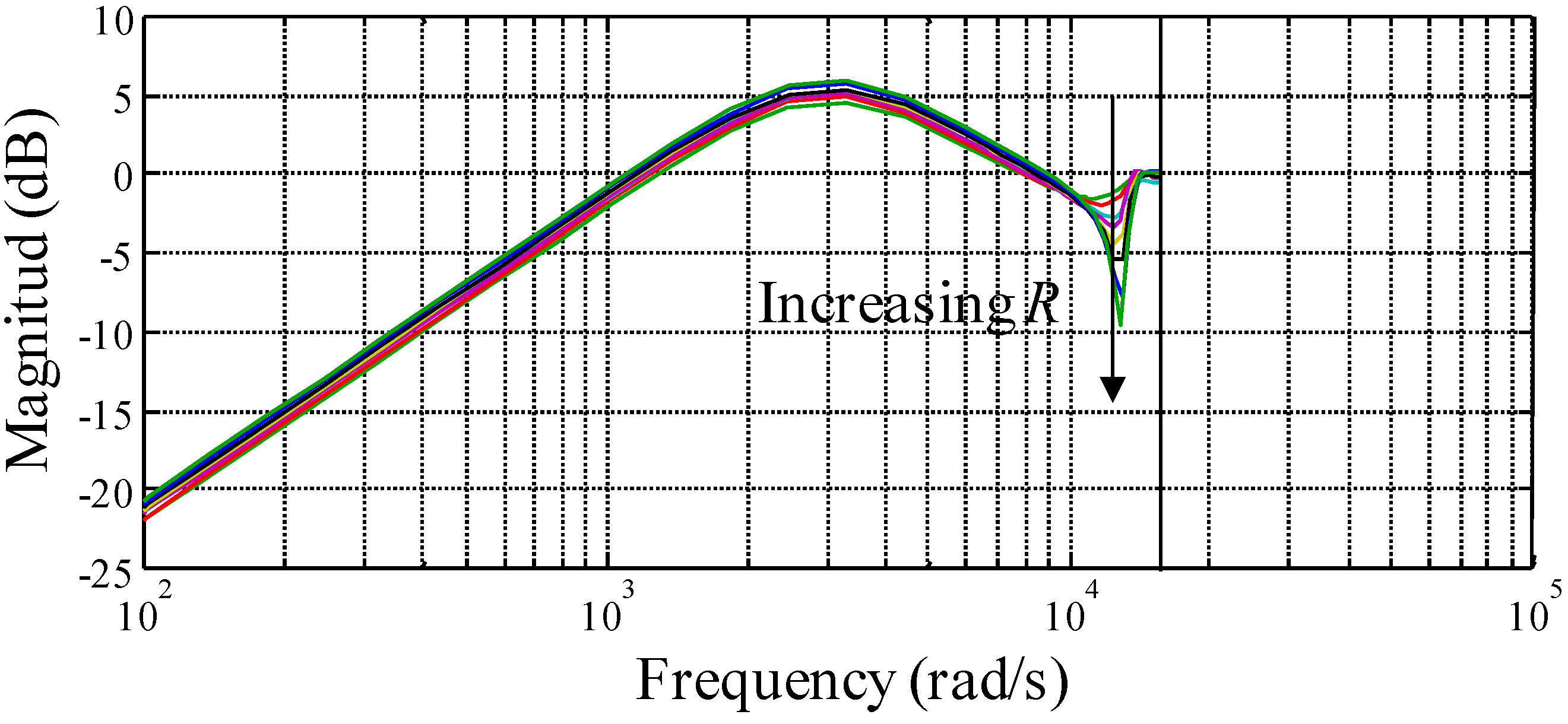
Figure 8 shows the Bode magnitude diagram of
Syp obtained with each controller. The modulus margin is always between −4.59 and −5.84 dB. Regarding the delay margin, it is higher than
Ts for all controllers.
Figure 8 shows also that
fAB is similar for all controllers, contrary to what it is observed in
Figure 7 for the Robust controller. The switching between different controllers is carried out with a bumpless strategy.
Figure 8.
Bode magnitude diagram of Syp of the current GS controller at different operating points.
Figure 8.
Bode magnitude diagram of Syp of the current GS controller at different operating points.
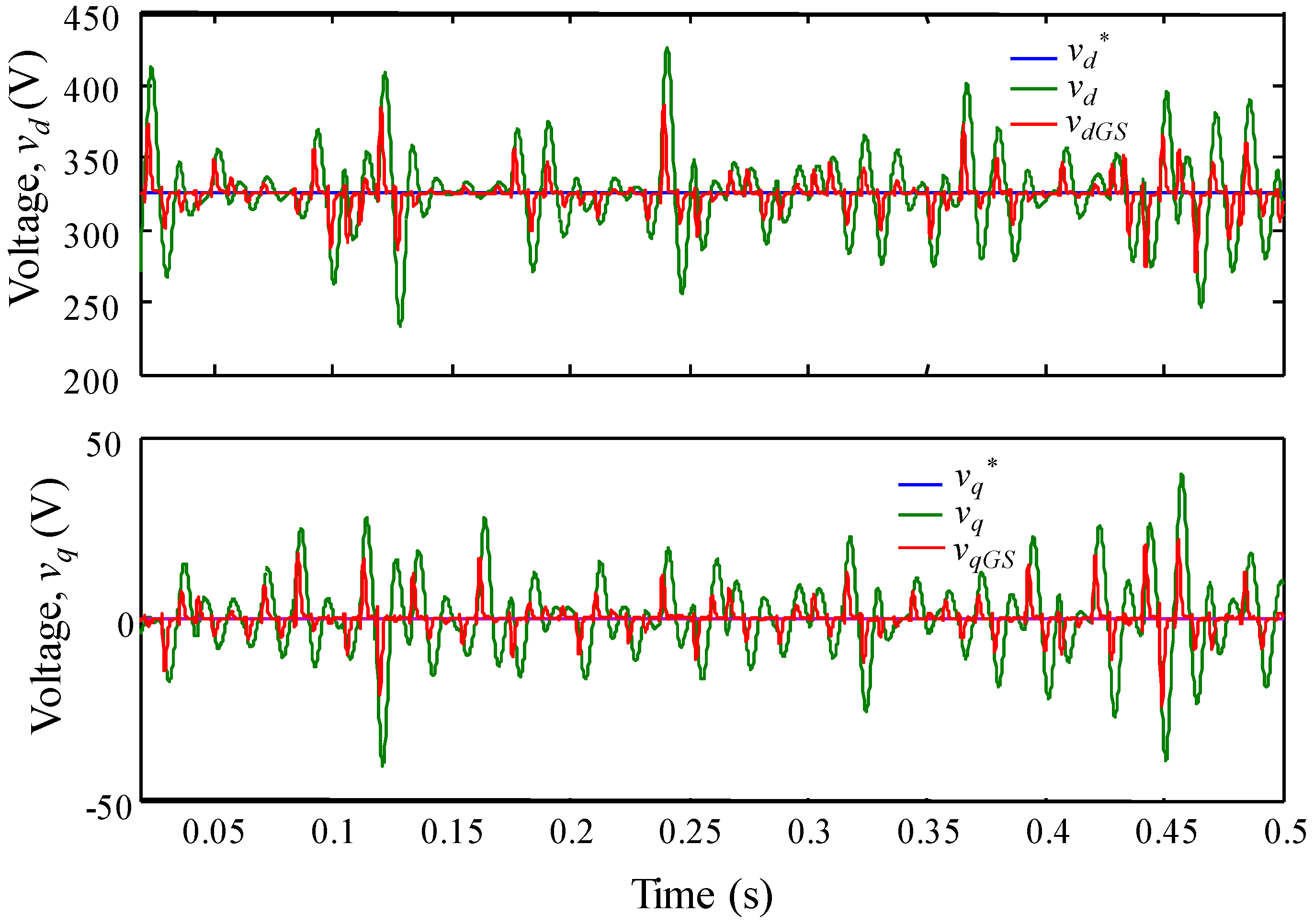
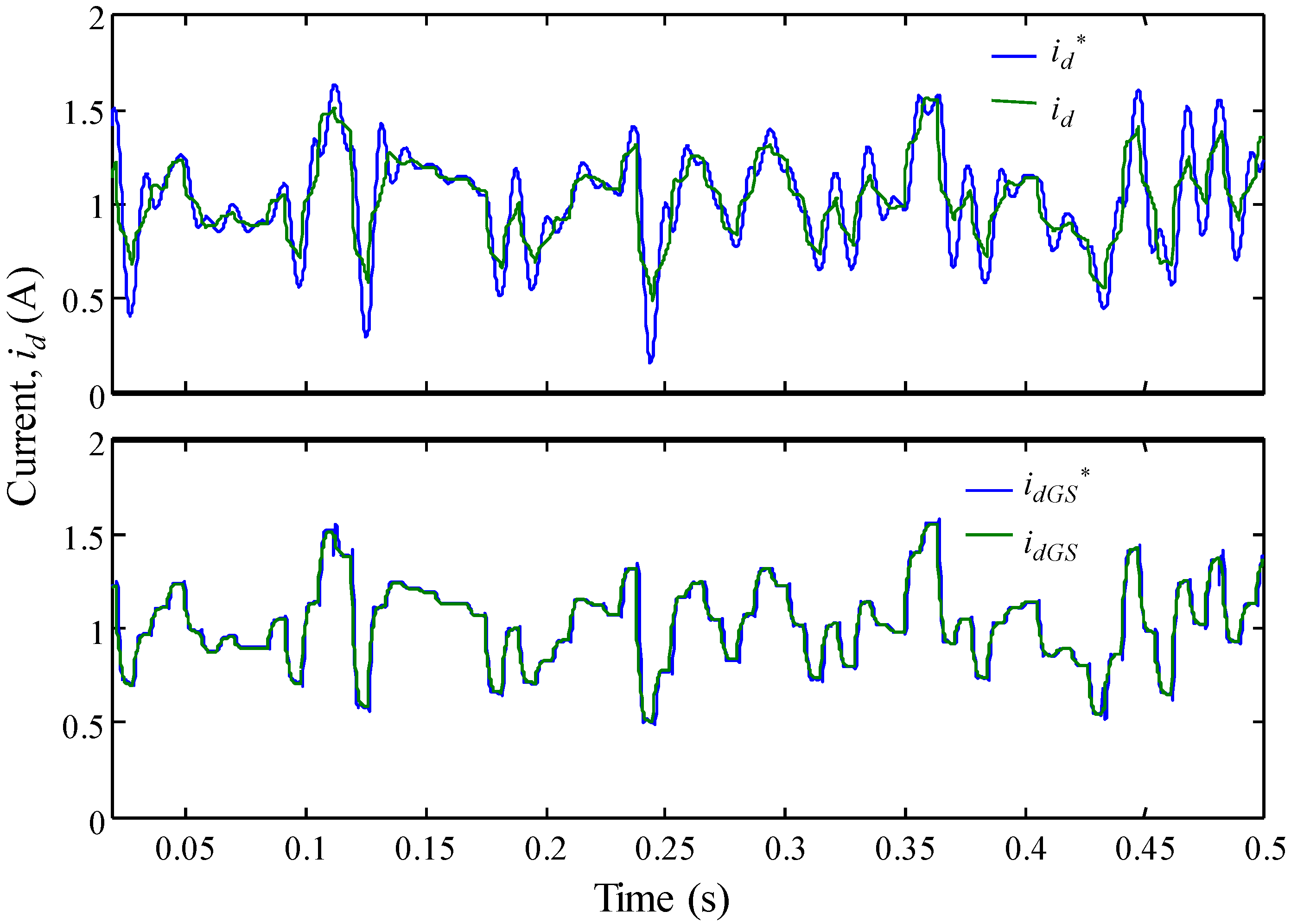
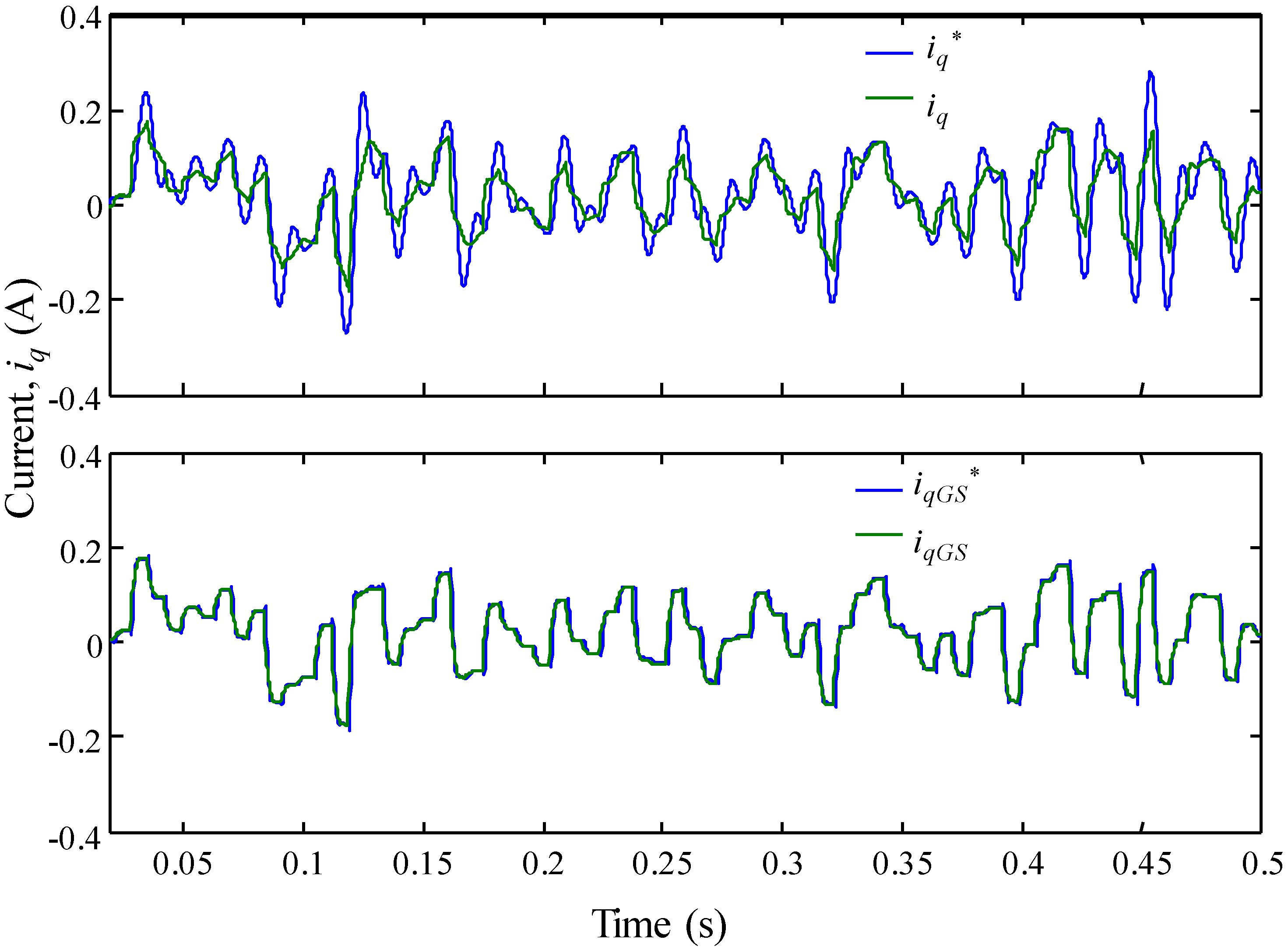
3.2. Voltage Loop
For this outer loop, as for the current loop, two different controllers are designed: a robust one and a GS type one. The plant is still nonlinear here. Postulating that the current controller has been appropriately designed, the plant model is composed by the product of the inner loop reference model and the resistance value R. Thus, as for the plant of the current loop, the nonlinearity is related to the resistive load value.
3.2.1. Control Objectives
The objective of the voltage controller is to regulate vd and vq voltages through the current references in d and q reference axes id* and iq*. Moreover, as for the current loop, the Robust controller has to be stable and robust in stability in the whole operating zone, with the same robustness margins defined previously. Concerning the specifications related to the static behavior, the response to a step of reference and disturbance should be zero. Regarding the GS controller, on top of these specifications, it has to keep the same CL system settling time in the whole operating zone.
3.2.2. Control Model
As mentioned above, the control model is composed by the product of the inner loop reference model and the resistance value
R:
The desired settling time for the voltage loop being the same as that of the current loop, the chosen sampling time is also the same. For the Robust controller, the nominal operating point has to be chosen. From Equation (16), it can be easily seen that the gain of the transfer function is proportional to R. Thus, the maximum gain is obtained for the maximum value of R, it is to say the operating point corresponding to the lowest power consumption. If the Robust controller is designed through the control model corresponding to this operating point, the controller should be robust in the rest of the operating zone where the gain of the plant is lower. Regarding the CL behavior, it will be slower when R decreases.
The obtained control model in the selected nominal operating point (
R = 10
Rnom) is:
This transfer function does not contain zeros. The “Pole placement with sensitivity function calibration” method is used to design the voltage controllers [
16]. It is very similar to the previous method. The only difference is that the plant numerator is not canceled out (
B* is not included in
Pc_des).
3.2.3. Robust Controller Design
The obtained controller is relatively simple. An integrator is included in
Hs. Moreover, the desired CL polynomial characteristic is that of the current loop reference model,
Am. Thus, the used controller design method is equivalent to the “Internal Model Control”. Concerning the
Pf polynomial, it is taken equal to 1.
HR is used to fix
Syp gain to 0 dB in 0.5
fs in order to ensure a good delay margin. The obtained robustness margins are: ∆
M = −3.9 dB and ∆τ = 2.23
Ts.
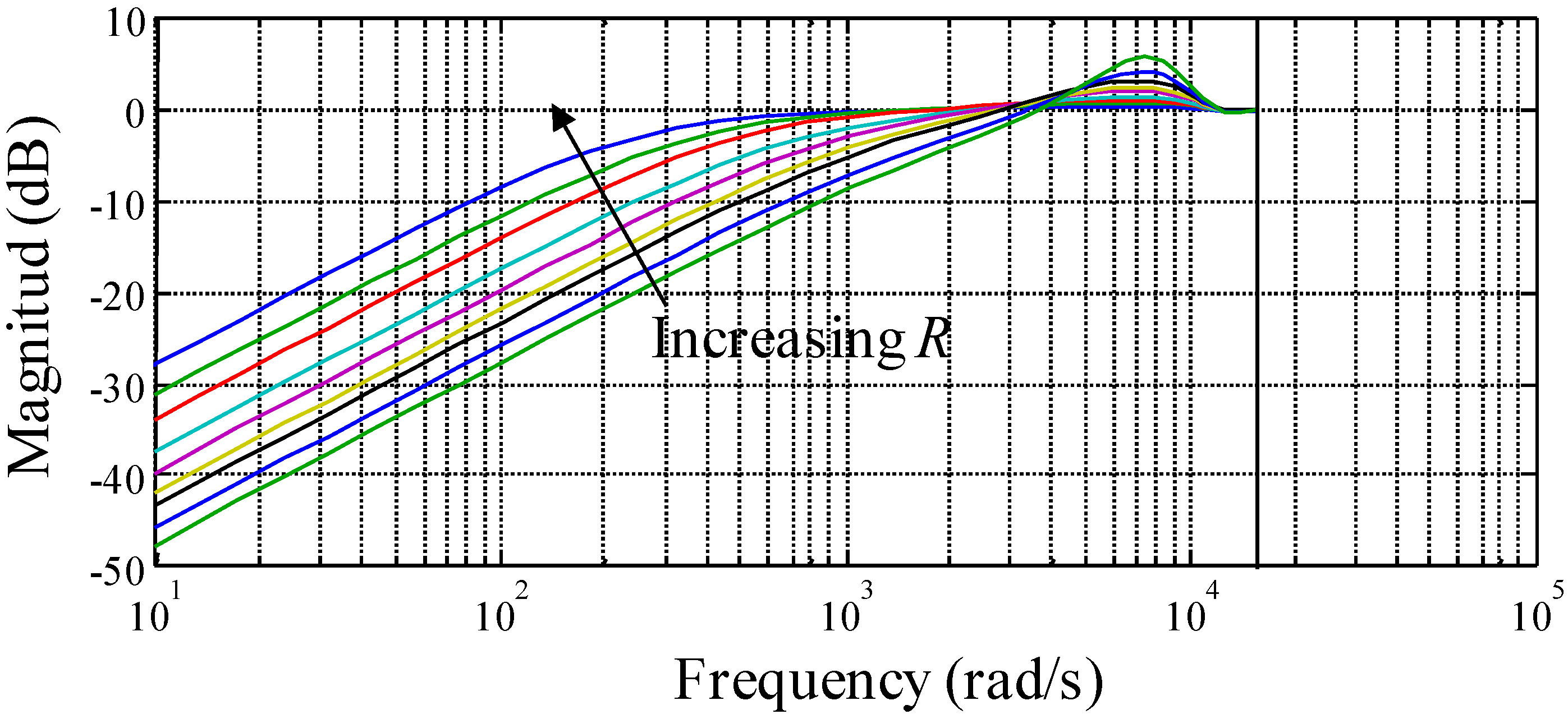
Figure 9 shows the Bode magnitude diagram of the sensitivity function for this controller in different operating points. As predicted before, the robustness margins obtained for lower value of
R are higher than those corresponding to the nominal point
R = 10
Rnom, while
fAB is lower.
Figure 9.
Bode magnitude diagram of Syp of the Robust voltage controller at different operating points.
Figure 9.
Bode magnitude diagram of Syp of the Robust voltage controller at different operating points.
Regarding the tracking dynamics, it is not so important because the voltage set-points in
d and
q reference axes are constant:
T is used to cancel out the regulation dynamics and ensure a unitary static gain. For the startup dynamics, a first order reference model with a settling time ts (5%) = 1.5 ms and unitary static gain is considered.
3.2.4. Gain Scheduling Controller Design
The GS controller is designed following the same process as for the current loop. The same scheduling parameter (estimated and filtered in the same way) and scheduling regions are considered. The controllers in the different points are designed and tuned with the same specifications as the Robust controller of the voltage loop. The obtained Syp and robustness margins for all local controllers are the same as those of the Robust controller in the nominal operating point: ∆M = −3.9 dB and ∆τ = 2.23 Ts.
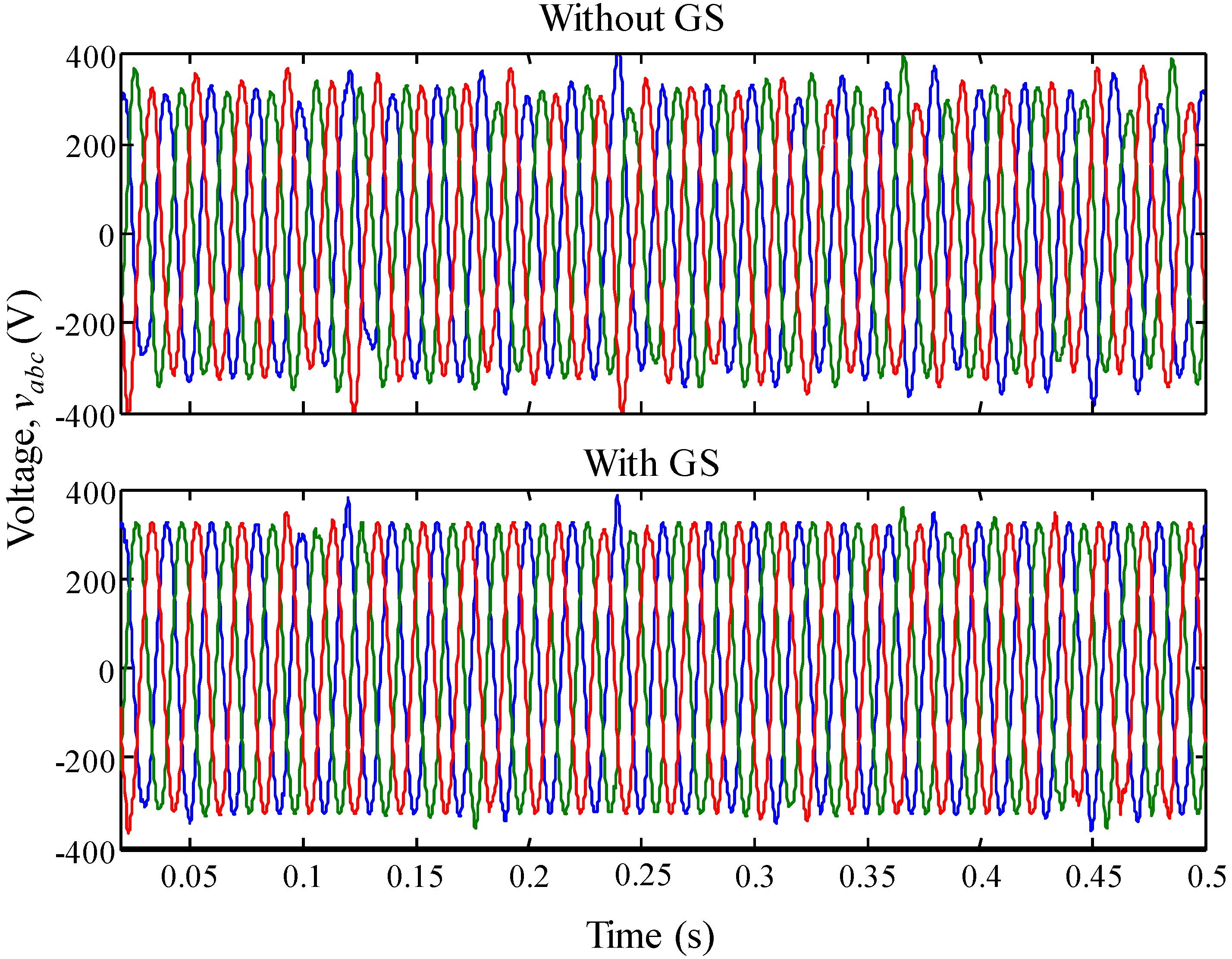
5. Conclusions and Perspectives
As predicted in the design of the controllers, unlike the Robust controller, the GS controller allows ensuring the same dynamical behavior in the whole operating zone. The design of the Robust controller is conservative because its main objective is to ensure the fulfillment of the specified robustness margins in the entire nonlinear operating zone. For this controller, the operating zone related to low values of consumed power (or high values of the load) is a bit problematic, because there, the inner loop dynamics is relatively slow. Moreover, in this case, the inner loop is slower than the outer one. Anyway, it has been proved that both controllers damp the oscillatory behavior of the plant and that they reject output disturbances relatively quickly. But, in presence of FVL, the THD produced with the Robust controller could be excessive, while it is acceptable with the GS controller.
Regarding the controllers’ robustness, the stability has been ensured in all carried out tests. Moreover, the GS controller is also robust in performance. However, as with this GS strategy the global stability is not guaranteed analytically, more trials should be carried out in order to test it. That is one of our perspectives, to make more tests in order to ensure the stability robustness of the GS controller, as explained in [
17]. Furthermore, experimental trials (including robustness tests) are planned in the EneR-GEA experimental microgrid [
14]. Moreover, for the design of the controllers which will be tested in that platform, it is foreseen to obtain the different control models corresponding to the considered operating points by identification, and to decrease the GS regions number considered here, in order to reduce the computational time.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





























