Modeling and Control of a Flux-Modulated Compound-Structure Permanent-Magnet Synchronous Machine for Hybrid Electric Vehicles

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
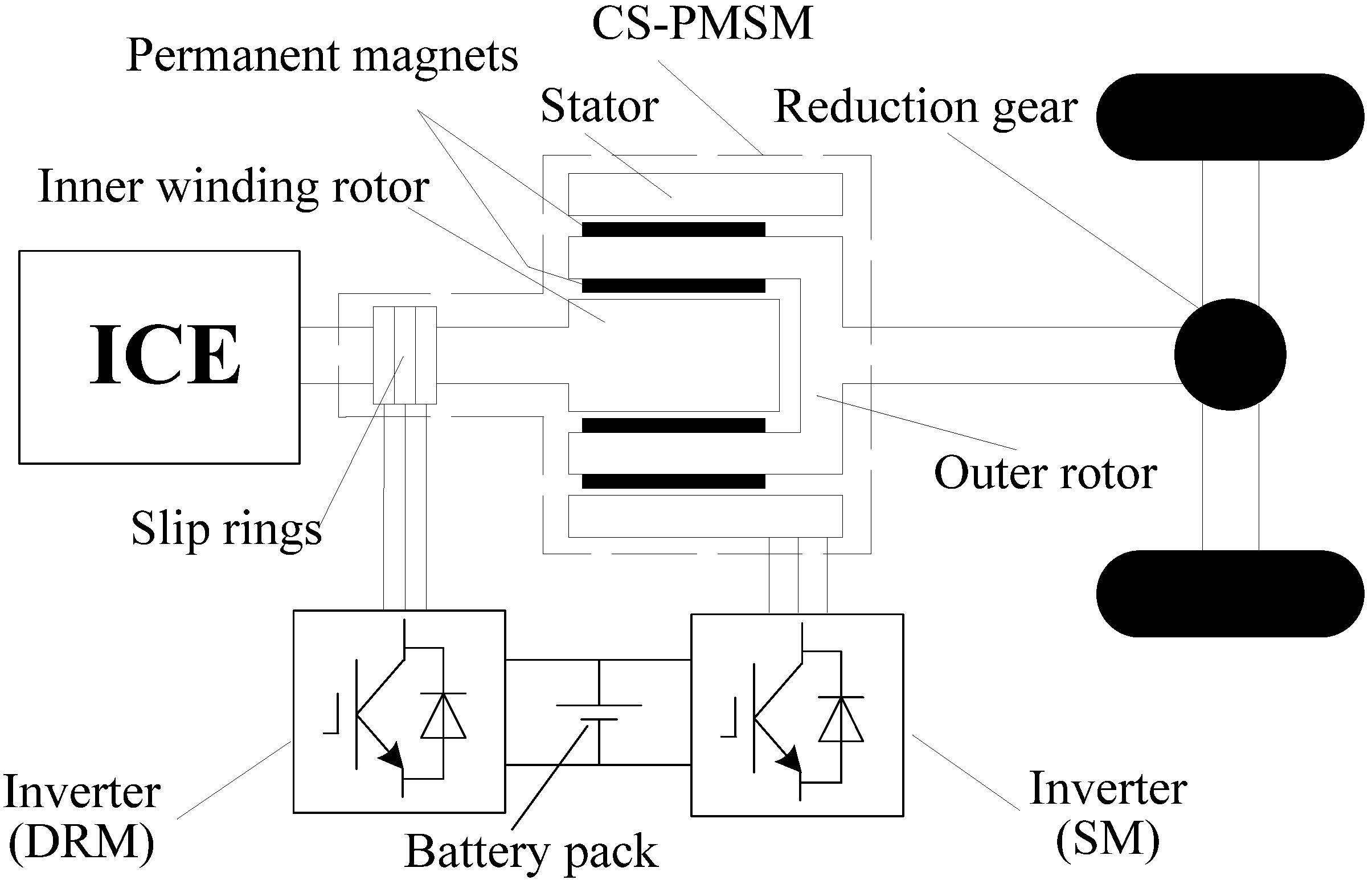
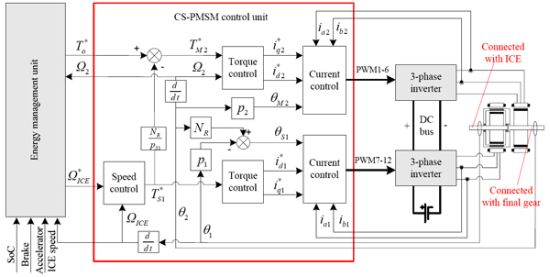
2. The Hybrid Electric Drive System Based on Flux-Modulated CS-PMSM
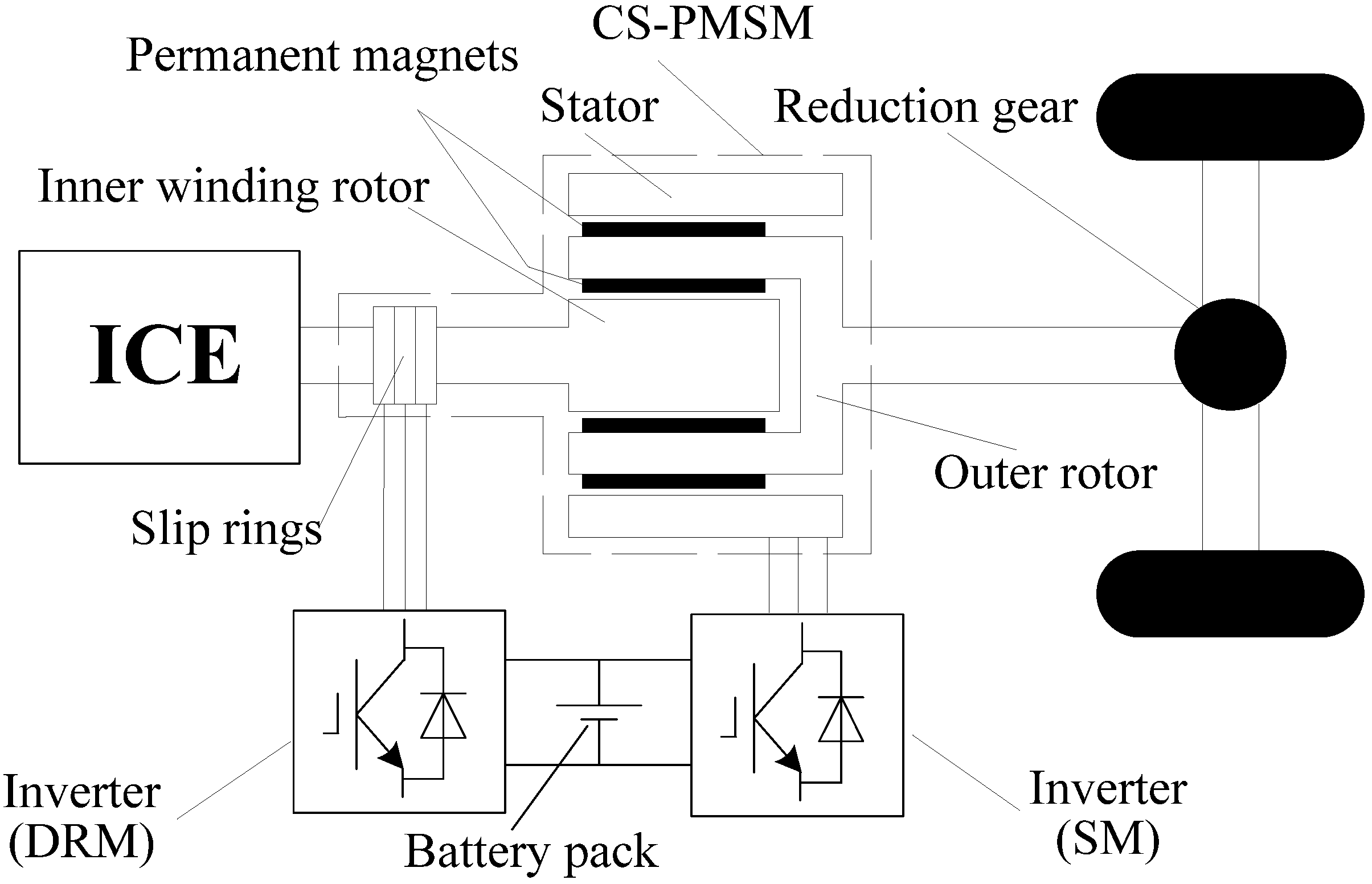
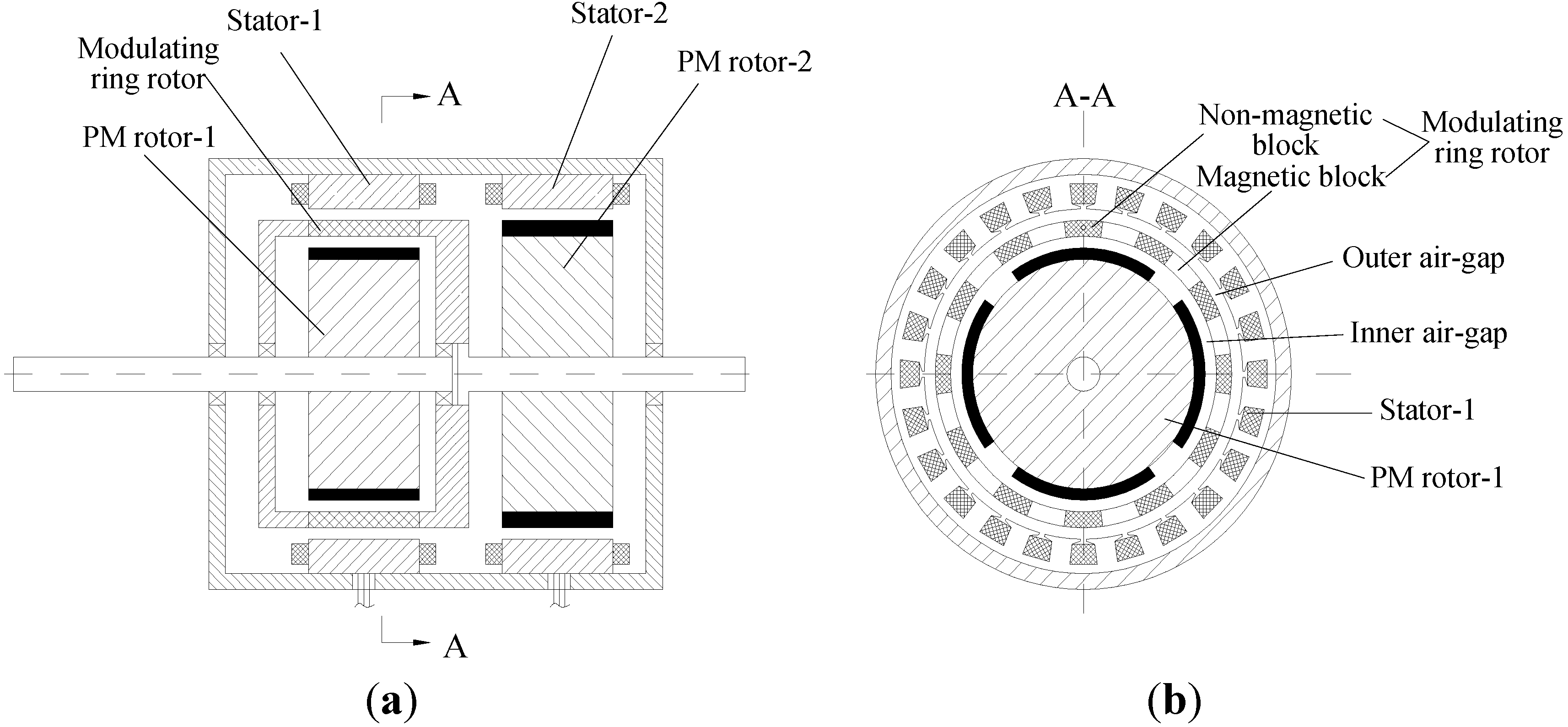
2.1. The Operating Principle of Flux-Modulated CS-PMSM
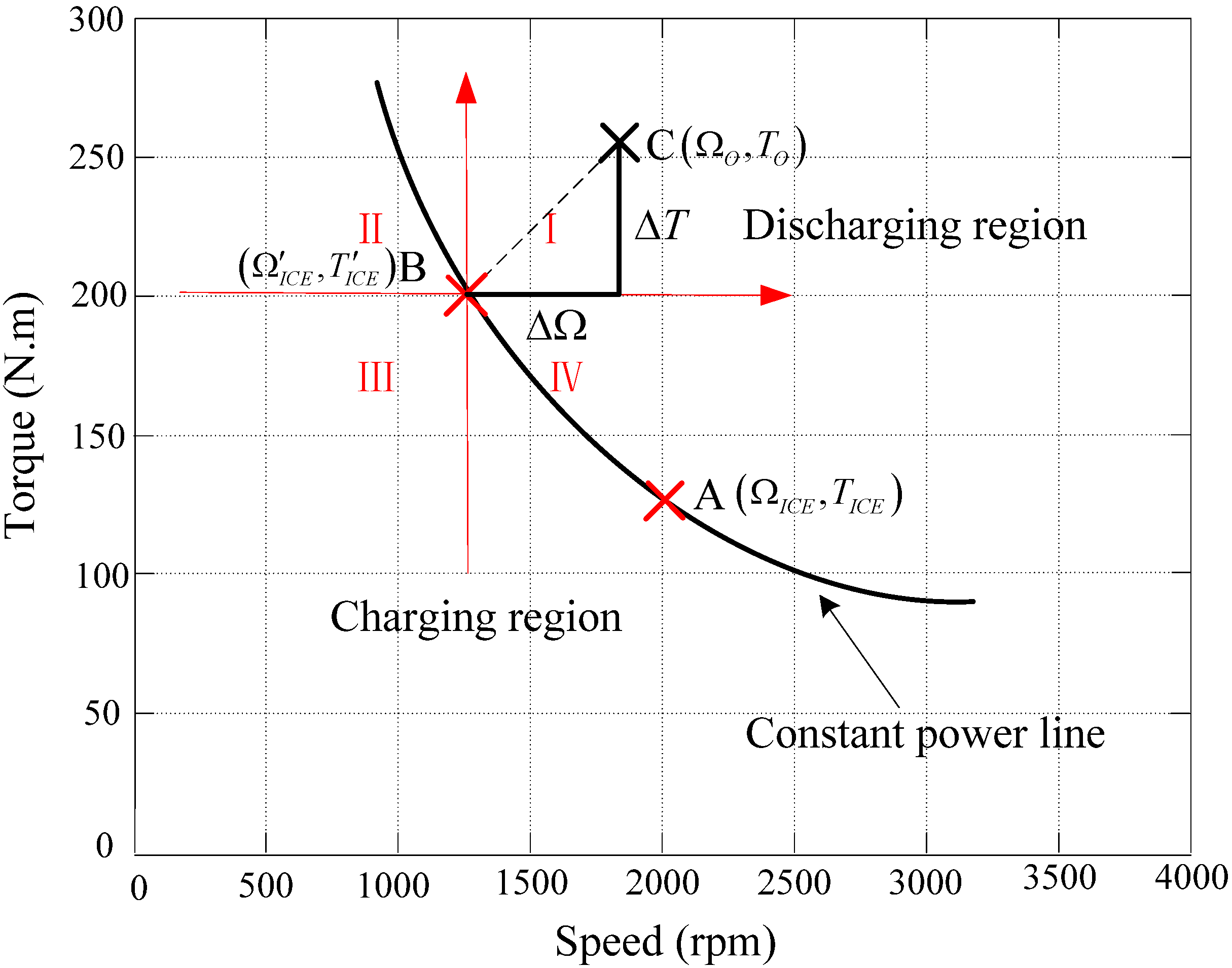
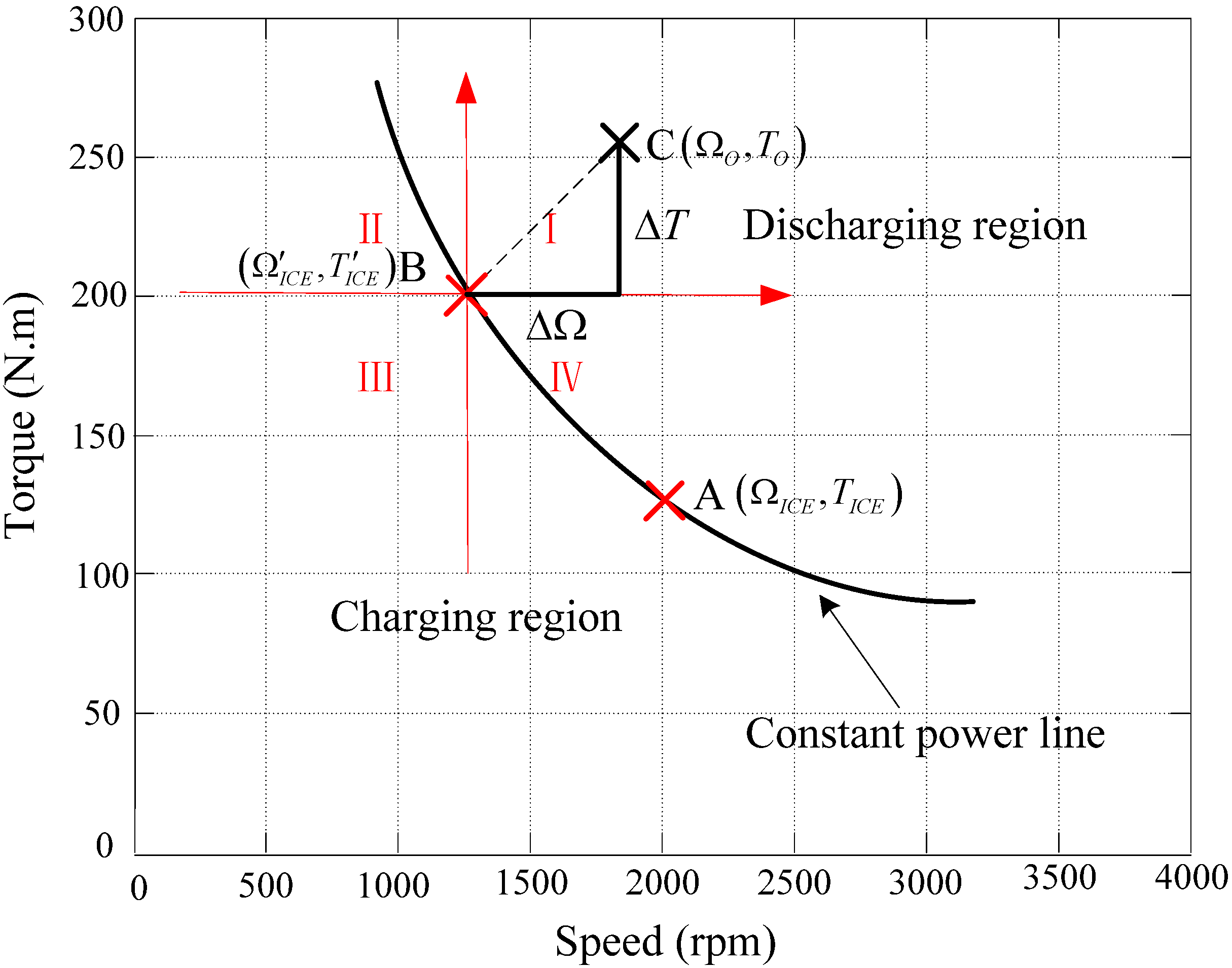
2.2. Basic Operating Modes of Flux-Modulated CS-PMSM
- (1)
- When > 0 and > 0, point C lies in quadrant I and both DRM and motor-2 work as motors. The CS-PMSM draws energy from battery packs to increase the output speed and torque. In this case, the vehicle runs under high speed and heavy load with added battery power. So the maximum lasting time of this mode depends on the state of charge (SOC). Generally, this mode is used for shot-time high-speed acceleration, e.g., overtaking.
- (2)
- When < 0 and > 0, point C lies in quadrant II. DRM works with negative speed and generates power for motor-2 or charging the battery. Motor-2 draws power from DC bus to increase output torque. This mode is used for low speed and high torque propulsion.
- (3)
- When < 0 and < 0, point C lies in quadrant III. Both DRM and motor-2 operate in generating mode charging the battery. In this case, the ICE delivers additional power as well as power required by driving demand.
- (4)
- When > 0 and < 0, point C lies in quadrant IV. DRM works as a motor to increase output speed while motor-2 as a generator to reduce output torque. This mode can be used for high-speed light-load cruising.
3. Modeling and Control of Flux-Modulated CS-PMSM System
3.1. Mathematical Models of Flux-Modulated CS-PMSM
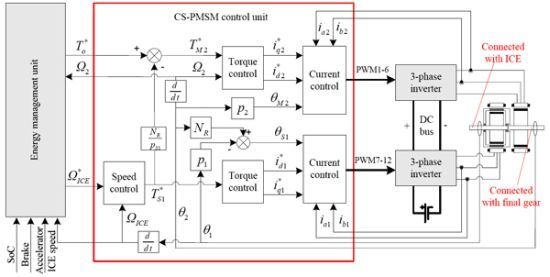
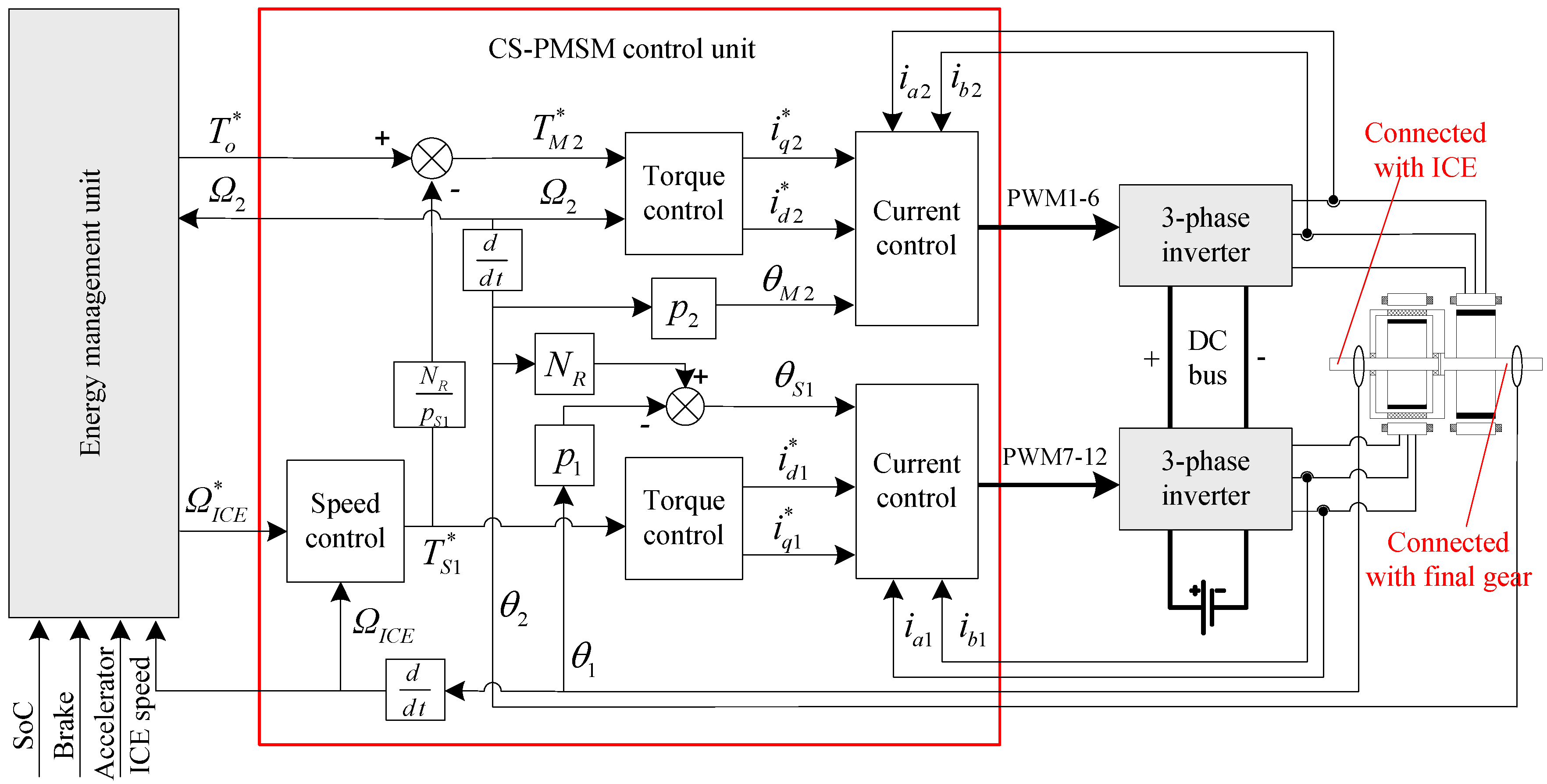
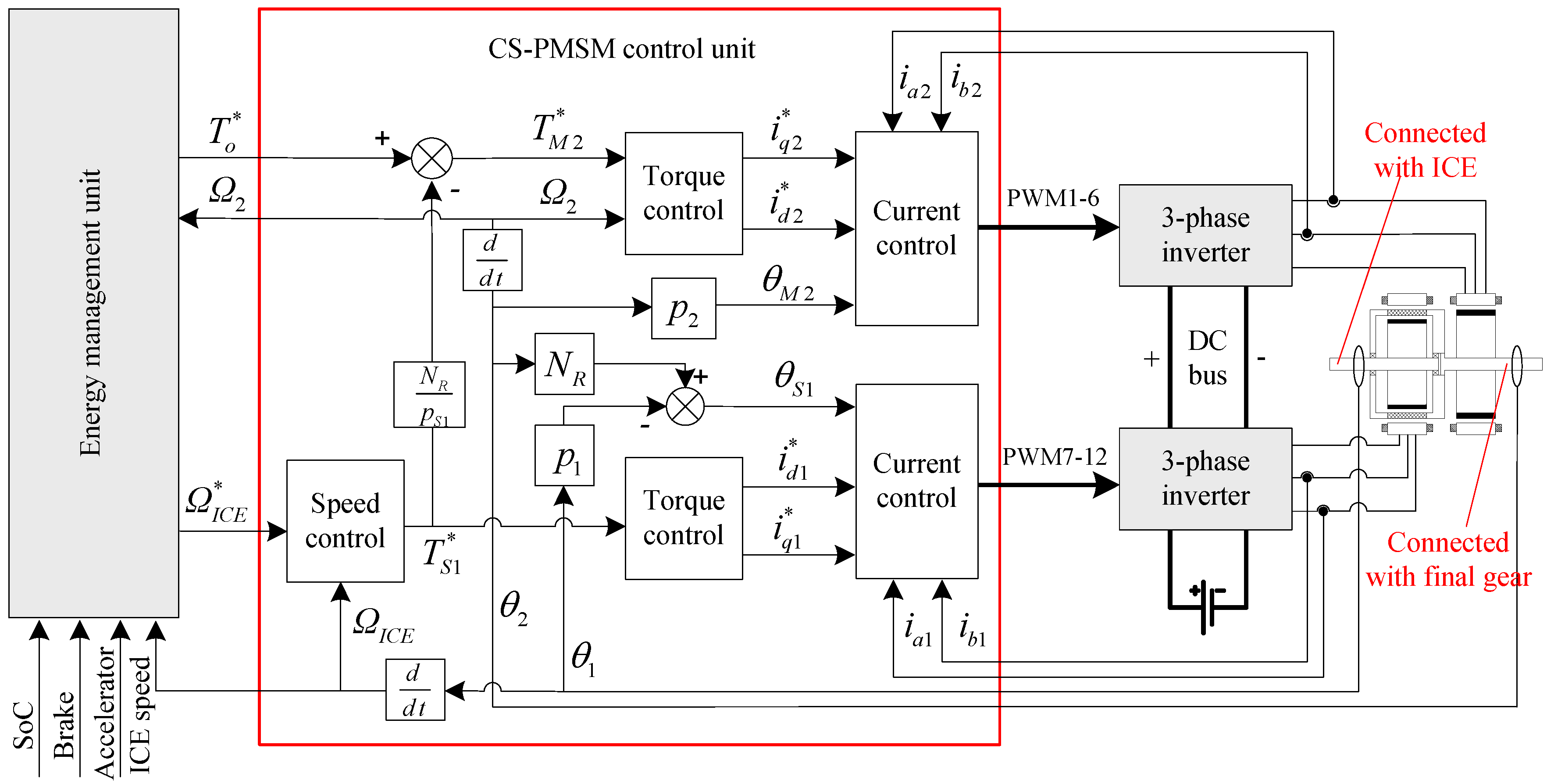
3.2. Control Strategy of Flux-Modulated CS-PMSM System
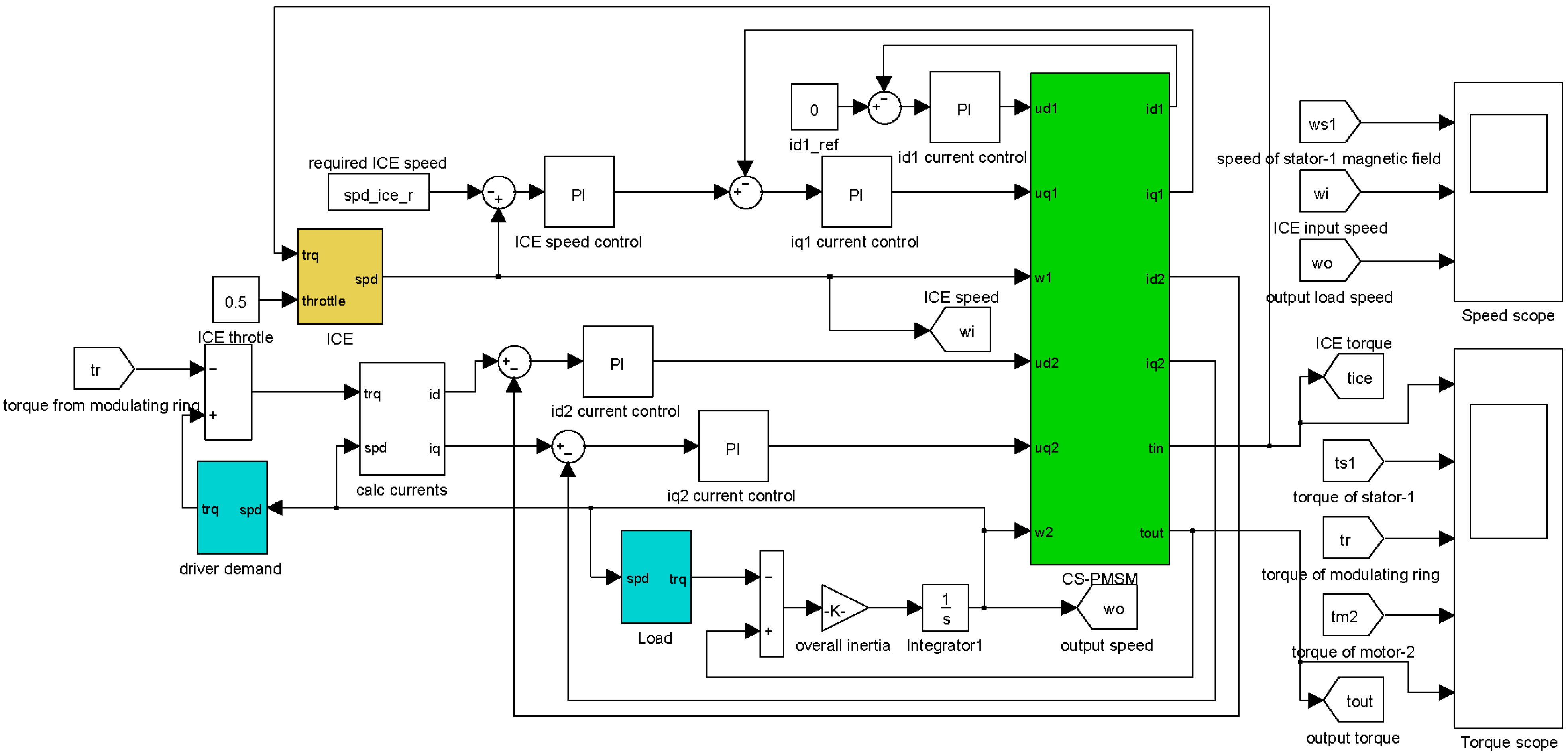
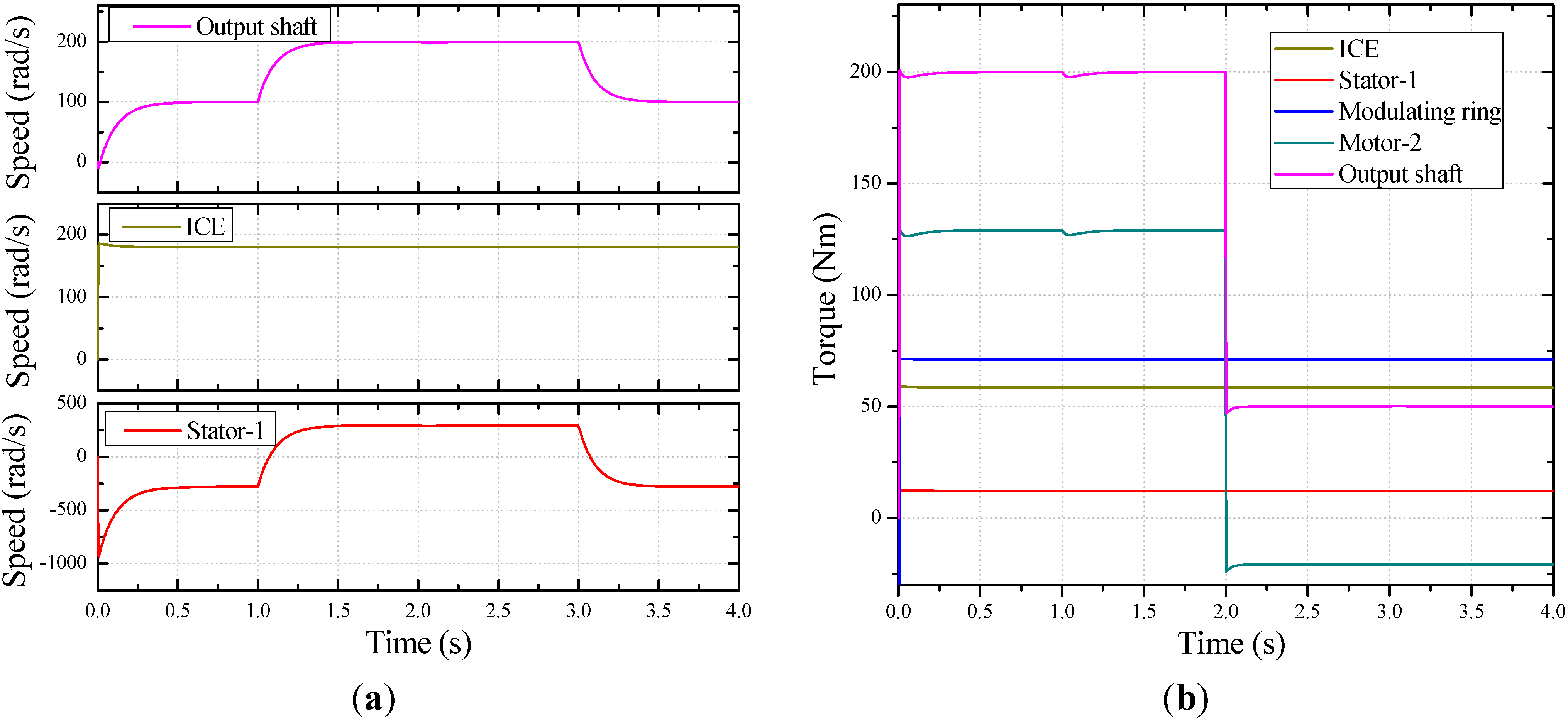
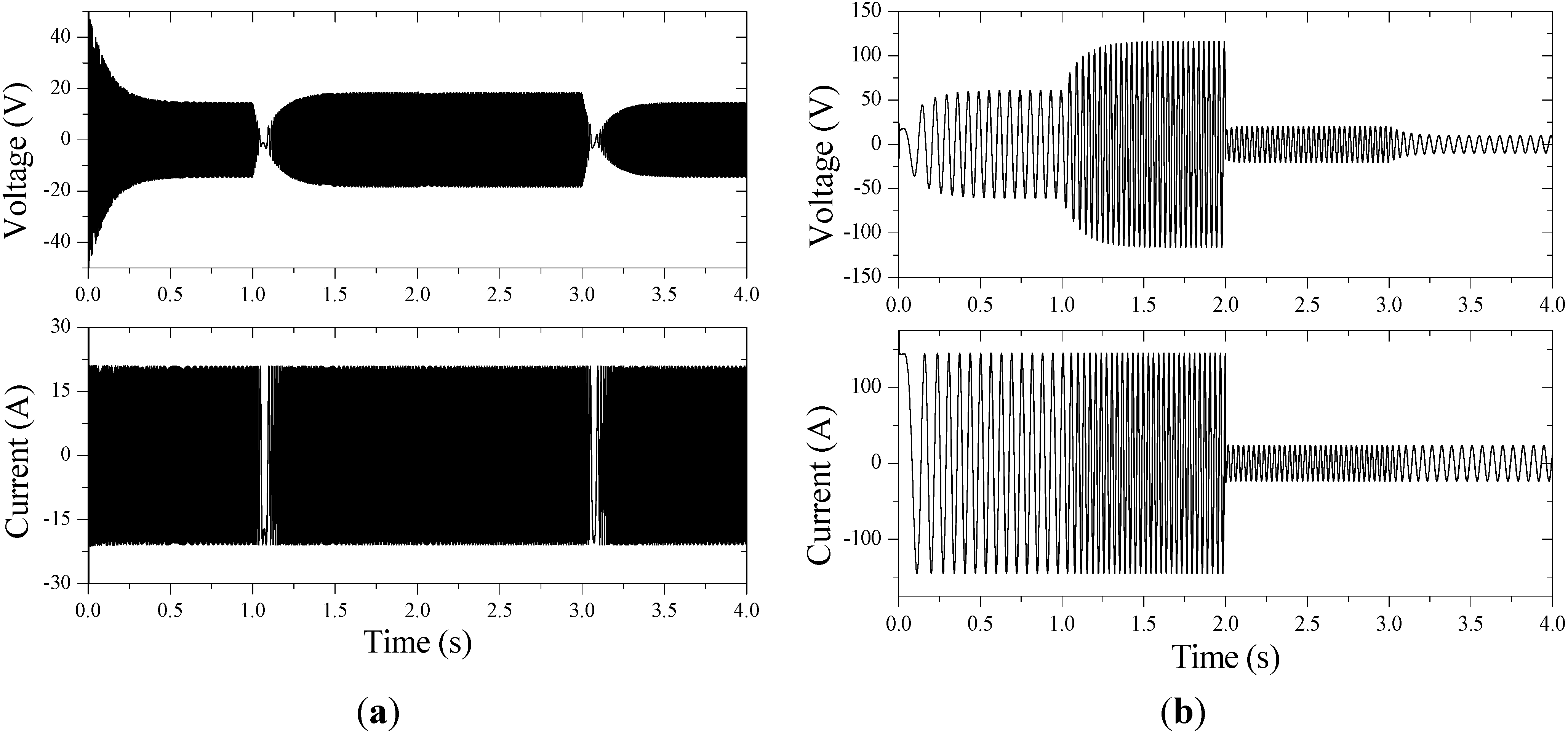
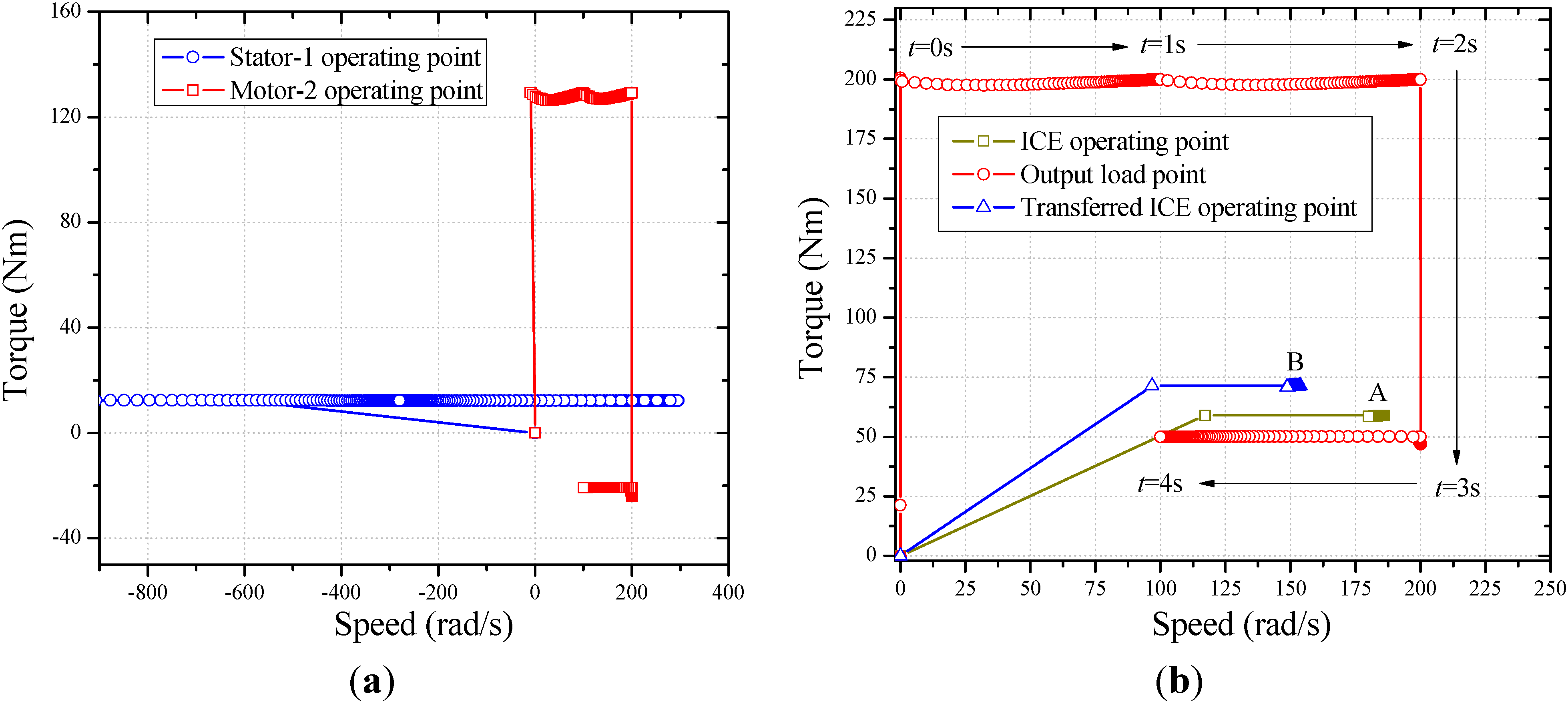
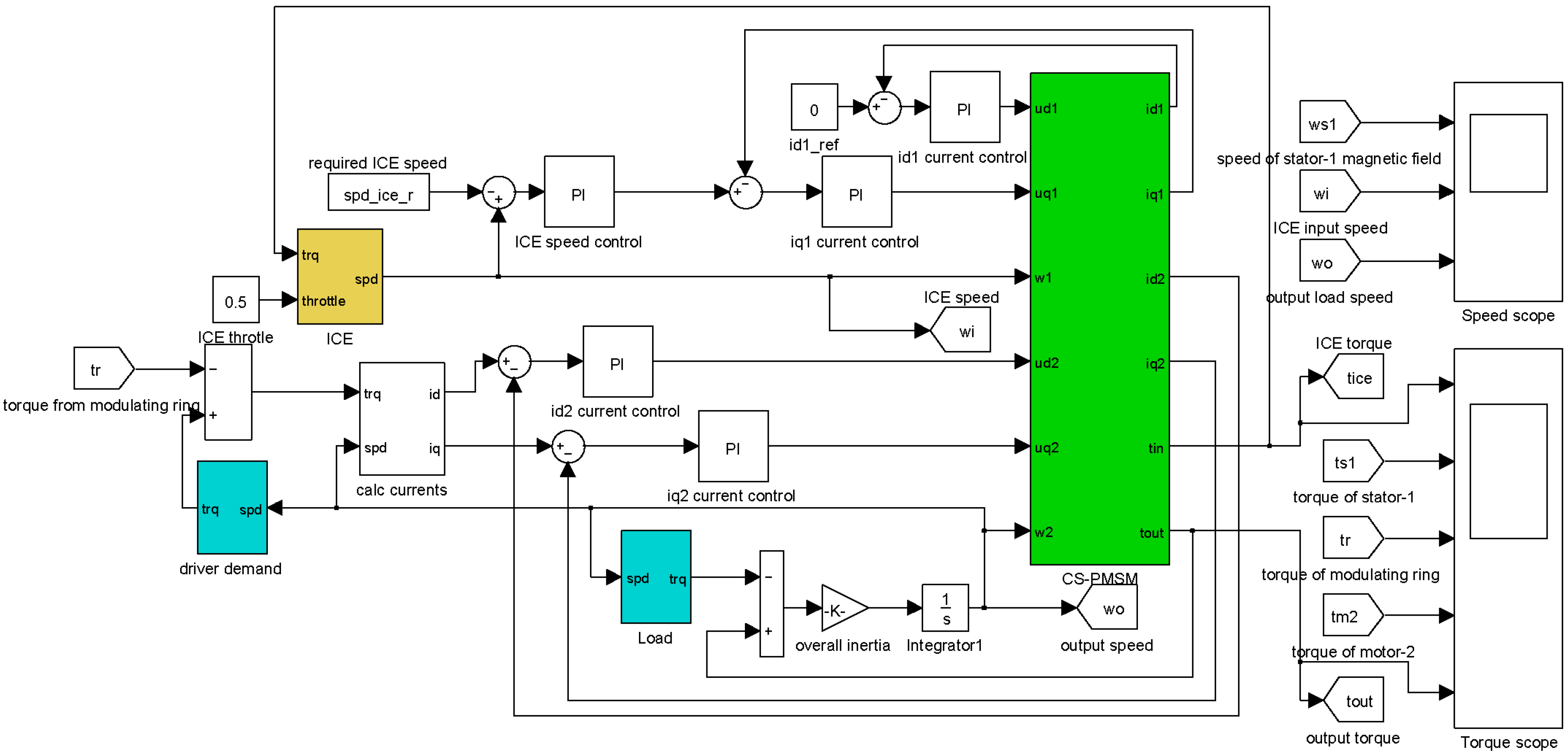
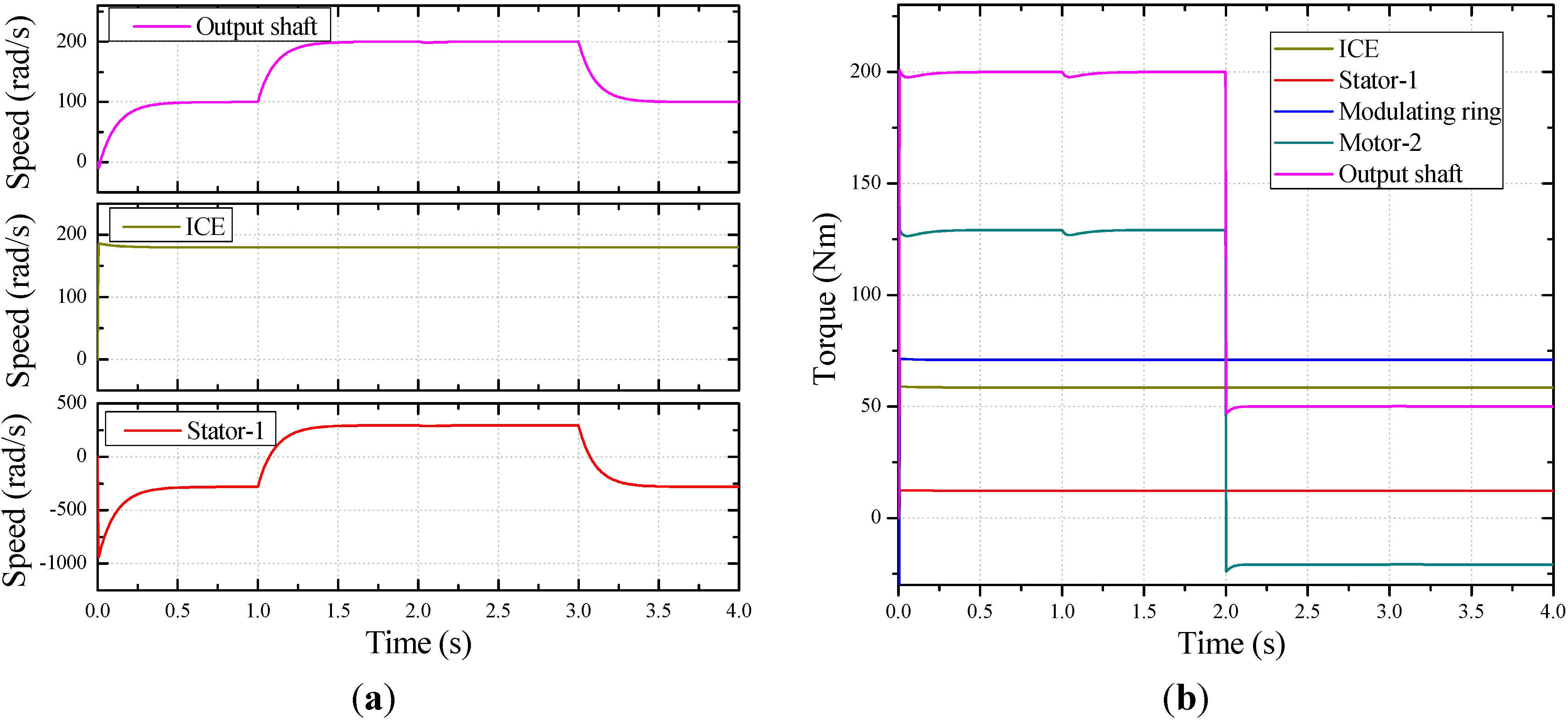
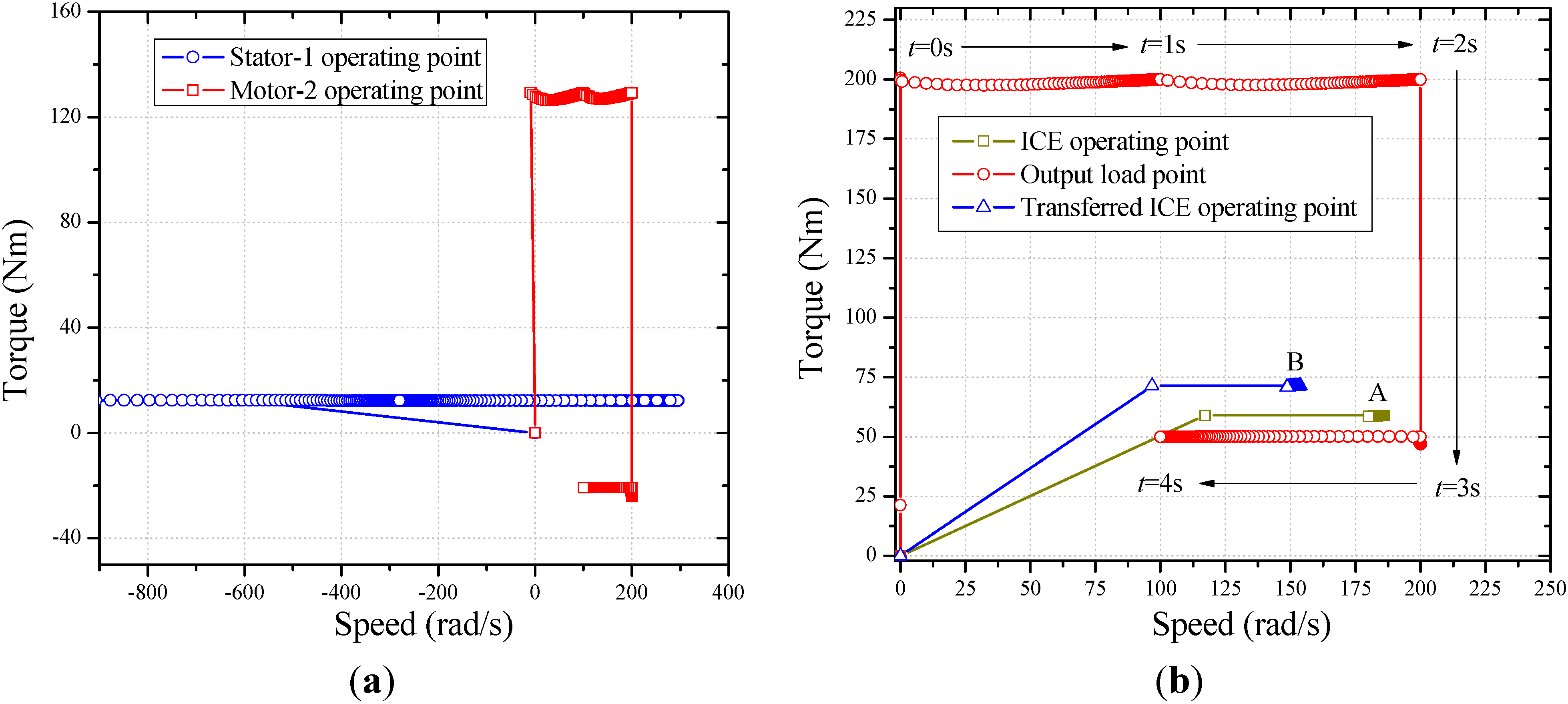
3.3. System Simulation

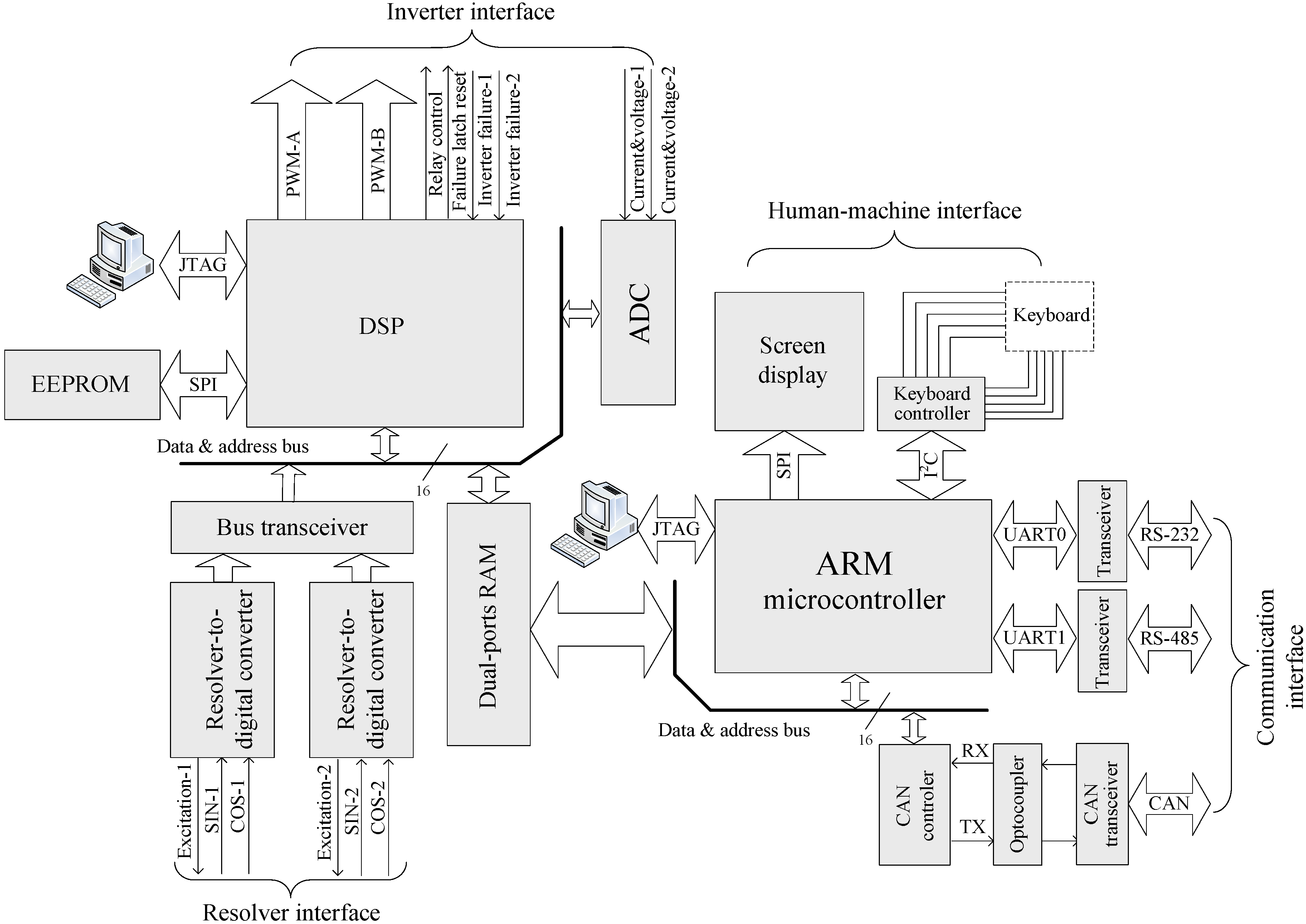
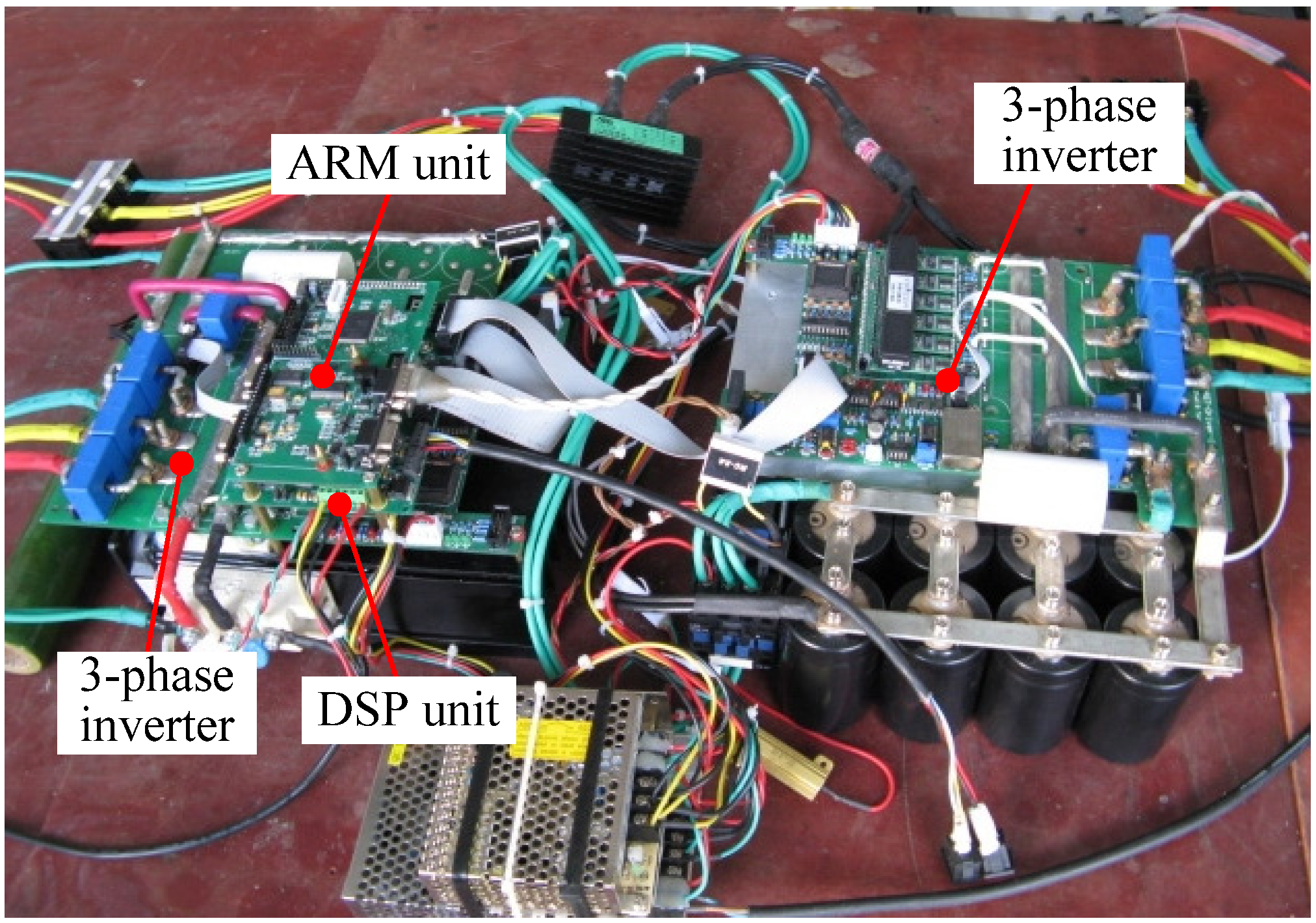
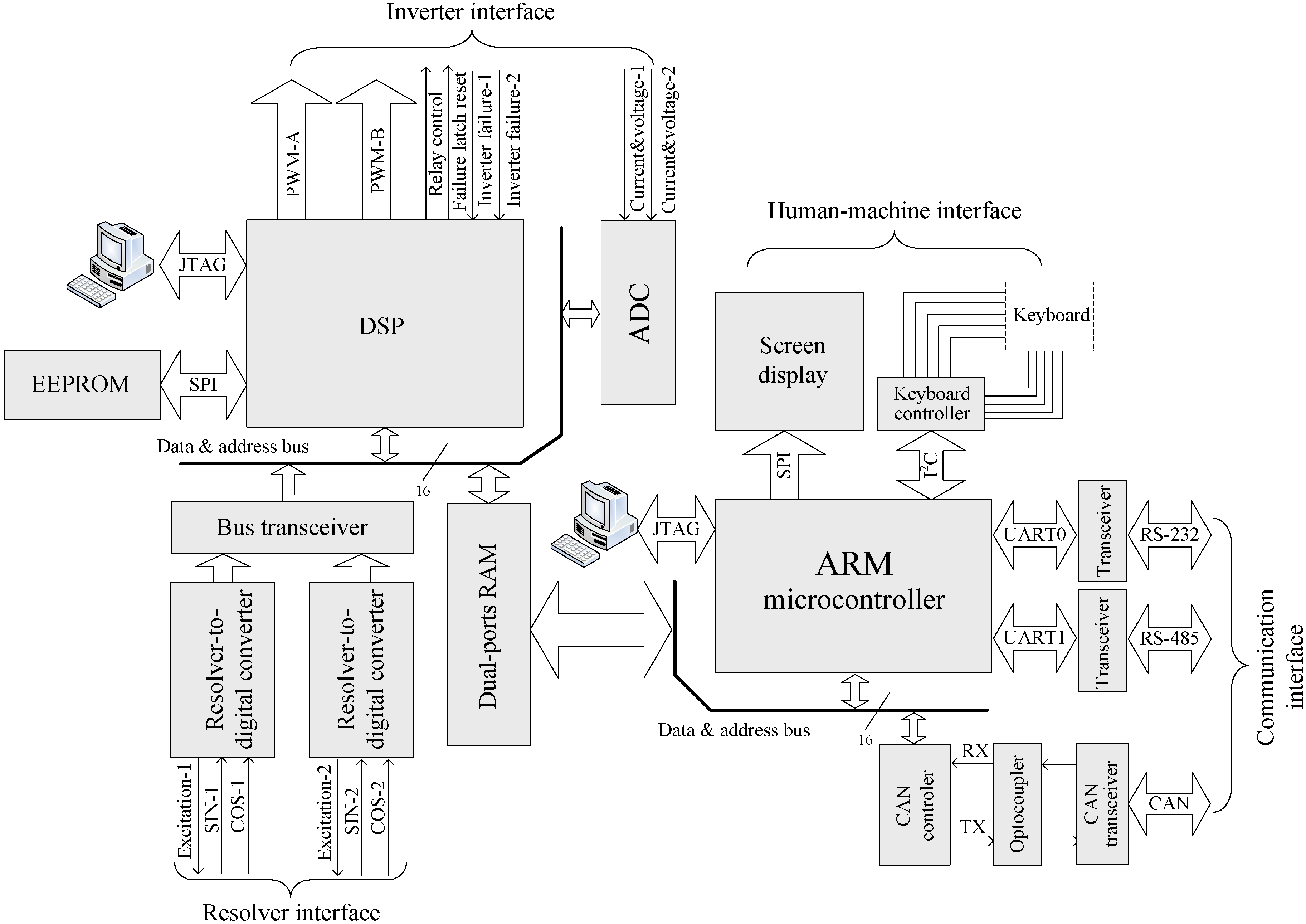
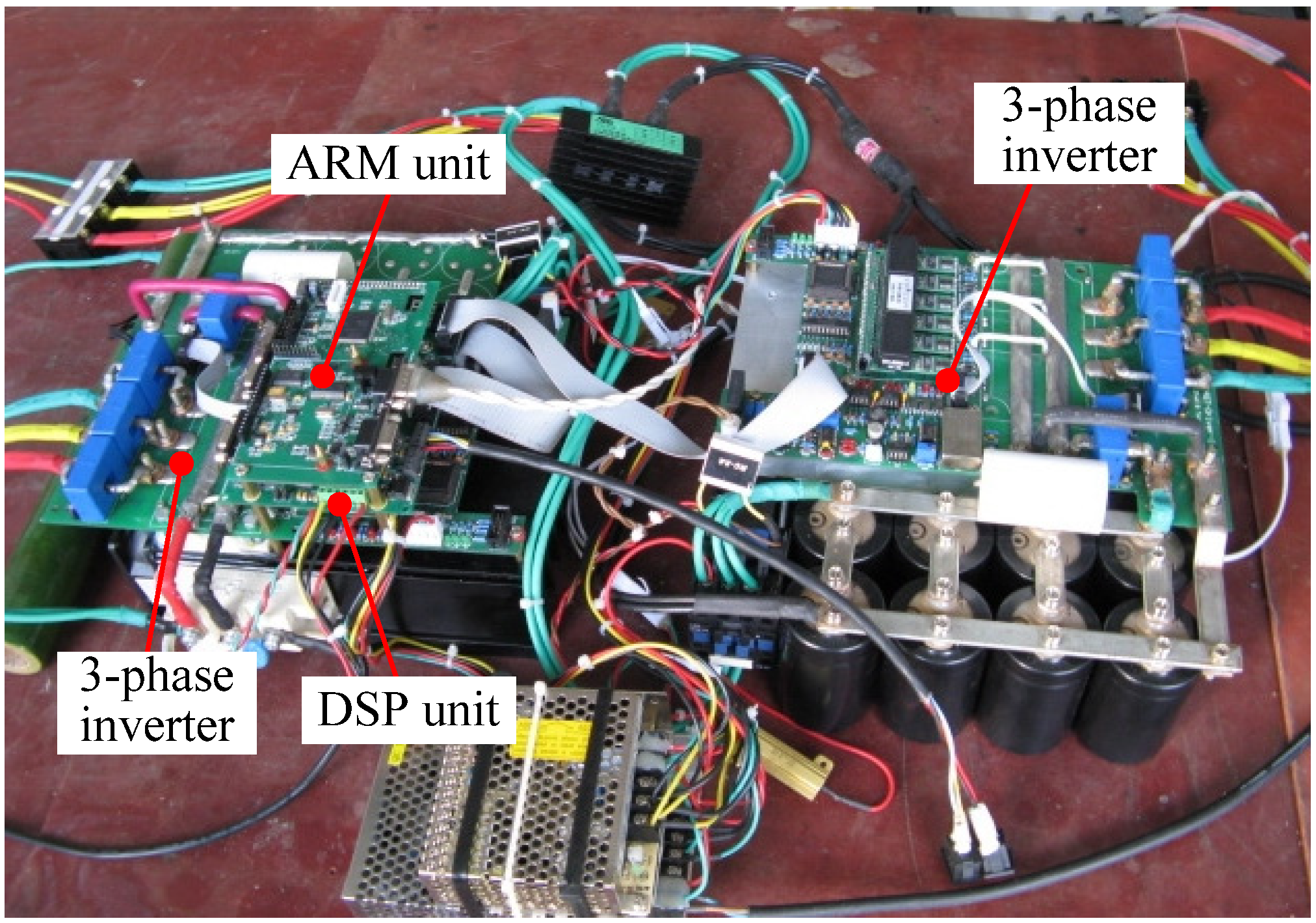
4. Implementation of the CS-PMSM Controller
5. Conclusions and Future Work
Acknowledgments
References
- Chan, C.C. The state of the art of electric, hybrid, and fuel cell vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Chau, K.T.; Chan, C.C. Emerging energy-efficient technologies for hybrid electric vehicles. Proc. IEEE 2007, 95, 821–835. [Google Scholar] [CrossRef]
- Zheng, P.; Liu, R.R.; Wu, Q.; Tong, C.D.; Tang, Z.J. Compound-Structure Permanent-Magnet Synchronous Machine Used for HEVs. In Proceedings of the International Conference on Electrical Machines and Systems, Wuhan, China, October 2008; pp. 2916–2920.
- Eriksson, S.; Sadarangani, C. A Four-Quadrant HEV Drive System. In Proceedings of the 56th IEEE Vehicular Technology Conference, Vancouver, BC, Canada, September 2002; Volume 3, pp. 1510–1514.
- Nordlund, E. The Four-Quadrant Transducer System for Hybrid Electric Vehicles. Ph.D. Thesis, Royal Institute of Technology, Stockholm, Sweden, May 2005. [Google Scholar]
- Xu, L.Y. A New Breed of Electrical Machines-Basic Analysis and Applications of Dual Mechanical Port Electric Machines. In Proceedings of the 8th International Conference on Electric Machines and Systems, Nanjing, China, 27–29 September 2005; Volume 1, pp. 24–31.
- Sun, X.; Cheng, M.; Hua, W.; Xu, L. Optimal design of double-layer permanent magnet dual mechanical port machine for wind power application. IEEE Trans. Magn. 2009, 45, 4613–4616. [Google Scholar] [CrossRef]
- Atallah, K.; Howe, D. A novel high-performance magnetic gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef]
- Jian, L.N.; Chau, K.T.; Zhang, D.; Jiang, J.Z.; Wang, Z. A magnetic-geared outer-rotor permanent-magnet brushless machine for wind power generation. IEEE Trans. Ind. Appl. 2009, 45, 954–962. [Google Scholar] [CrossRef]
- Jian, L.N.; Chau, K.T.; Jiang, J.Z. An Integrated Magnetic-Geared Permanent-Magnet in-Wheel Motor Drive for Electric Vehicles. In Proceedings of the IEEE Vehicle Power Propulsion Conference (VPPC), Harbin, China, 3–5 September 2008; pp. 1–6.
- Chau, K.T.; Zhang, D.; Jiang, J.Z.; Liu, C.H.; Zhang, Y. Design of a magnetic-geared outer-rotor permanent-magnet brushless motor for electric vehicles. IEEE Trans. Magn. 2007, 43, 2504–2506. [Google Scholar] [CrossRef]
- Wang, L.L.; Shen, J.X.; Luk, P.C.K.; Fei, W.Z.; Wang, C.F.; Hao, H. Development of a magnetic-geared permanent-magnet brushless motor. IEEE Trans. Magn. 2009, 45, 4578–4581. [Google Scholar] [CrossRef]
- Fu, W.N.; Ho, S.L. A quantitative comparative analysis of a novel flux-modulated permanent-magnet motor for low-speed drive. IEEE Trans. Magn. 2010, 46, 127–134. [Google Scholar] [CrossRef]
- Atallah, K.; Calverley, S.D.; Howe, D. Design, analysis and realization of a high performance magnetic gear. IEEE Proc. Electr. Power Appl. 2004, 151, 135–143. [Google Scholar] [CrossRef]
- Jian, L.; Chau, K.T. Design and analysis of a magnetic-geared electronic-continuously variable transmission system using finite element method. Prog. Electromagn. Res. 2010, 107, 47–61. [Google Scholar] [CrossRef]
- Nordlund, E.; Sadarangani, C. The Four-quadrant Energy Transducer. In Proceedings of the 37th ISA Annual Meeting Conference, Pittsburgh, PA, USA, October 2002; Volume 1, pp. 390–397.
- Pillay, P.; Krishnan, R. Modeling, simulation, and analysis of permanent-magnet motor drives. I. The permanent-magnet synchronous motor drive. IEEE Trans. IA 1989, 25, 265–273. [Google Scholar]
- Staunton, R.H.; Ayers, C.W.; Marlino, L.D.; Chiasson, J.N. Evaluation of 2004 Toyota Prius Hybrid Electric Drive System; Oak Ridge National Laboratory Technical Report, ORNL/TM-2006/423; U.S. Department of Energy FreedomCAR and Vehicle Technologies: Washington, D.C., USA, 2006. [Google Scholar]
- Kawahashi, A. A New-Generation Hybrid Electric Vehicle and Its Supporting Power Semiconductor Devices. In Proceedings of the 16th International Symposium on Power Semiconductor Devices and ICs, Kitakyushu, Japan, May 2004; pp. 23–29.
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Zheng, P.; Tong, C.; Bai, J.; Zhao, J.; Sui, Y.; Song, Z. Modeling and Control of a Flux-Modulated Compound-Structure Permanent-Magnet Synchronous Machine for Hybrid Electric Vehicles. Energies 2012, 5, 45-57. https://doi.org/10.3390/en5010045
Zheng P, Tong C, Bai J, Zhao J, Sui Y, Song Z. Modeling and Control of a Flux-Modulated Compound-Structure Permanent-Magnet Synchronous Machine for Hybrid Electric Vehicles. Energies. 2012; 5(1):45-57. https://doi.org/10.3390/en5010045
Chicago/Turabian StyleZheng, Ping, Chengde Tong, Jingang Bai, Jing Zhao, Yi Sui, and Zhiyi Song. 2012. "Modeling and Control of a Flux-Modulated Compound-Structure Permanent-Magnet Synchronous Machine for Hybrid Electric Vehicles" Energies 5, no. 1: 45-57. https://doi.org/10.3390/en5010045
APA StyleZheng, P., Tong, C., Bai, J., Zhao, J., Sui, Y., & Song, Z. (2012). Modeling and Control of a Flux-Modulated Compound-Structure Permanent-Magnet Synchronous Machine for Hybrid Electric Vehicles. Energies, 5(1), 45-57. https://doi.org/10.3390/en5010045