
Review on the Development and Applications of Permanent Magnet Vernier Motors




Abstract
1. Introduction
- Analysis of the operating principles of Vernier motors based on air-gap magnetic field modulation theory;
- Methods for improving torque density and optimizing power factor;
- Comprehensive optimization considering both cost and performance;
- Research on conventional and special application scenarios.
2. Analysis Methods of PMVM
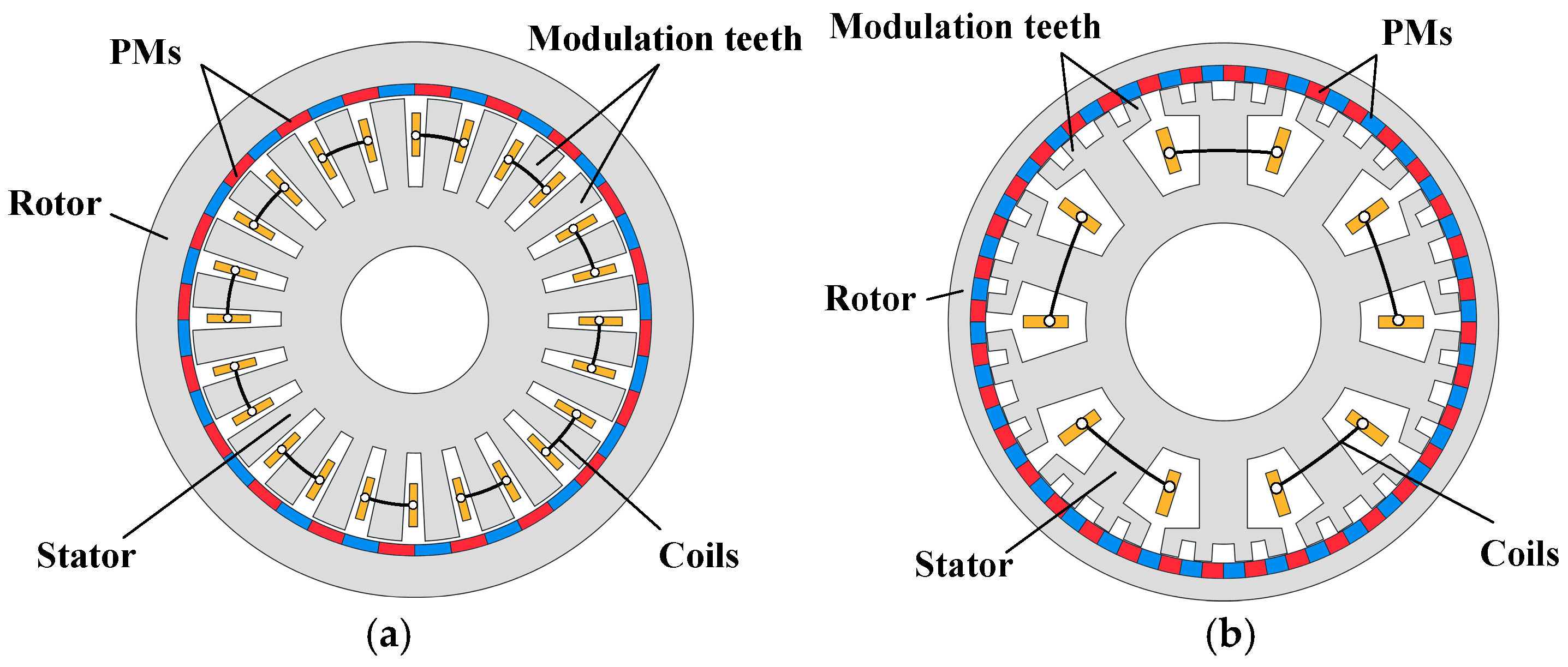
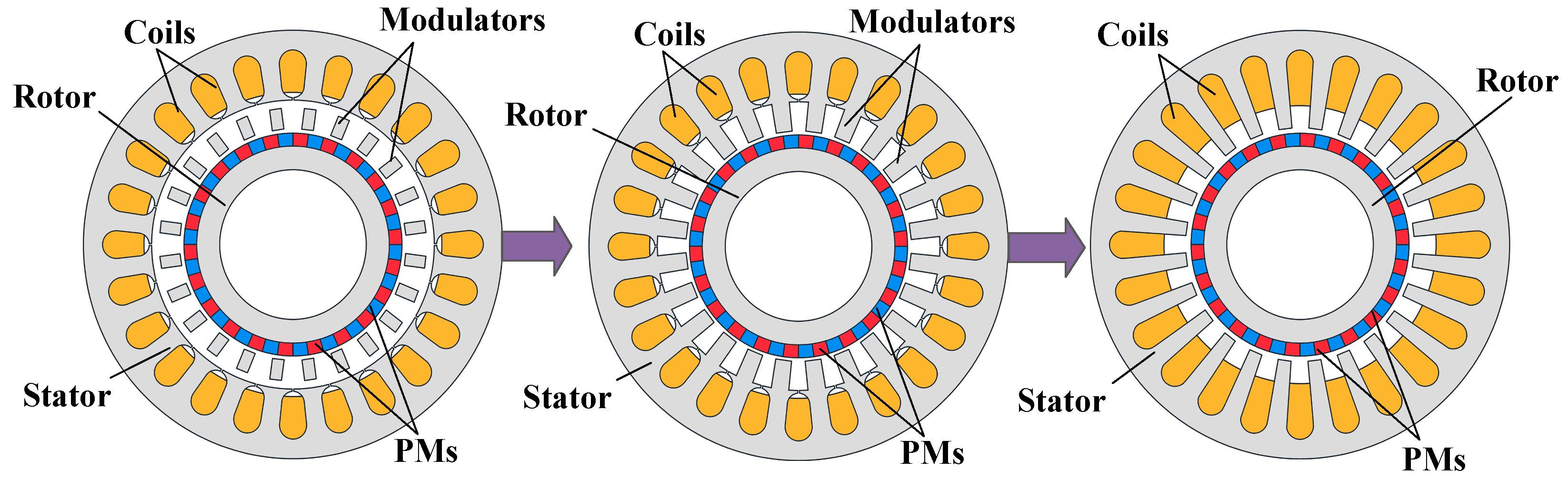
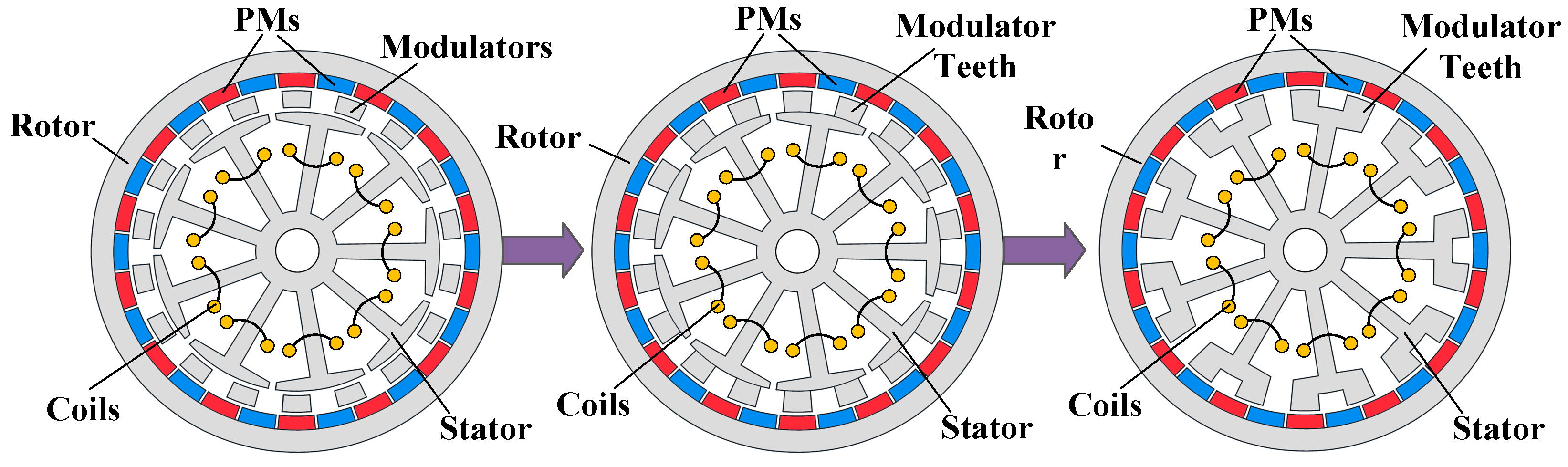
2.1. Topological Evolution of Vernier Motors
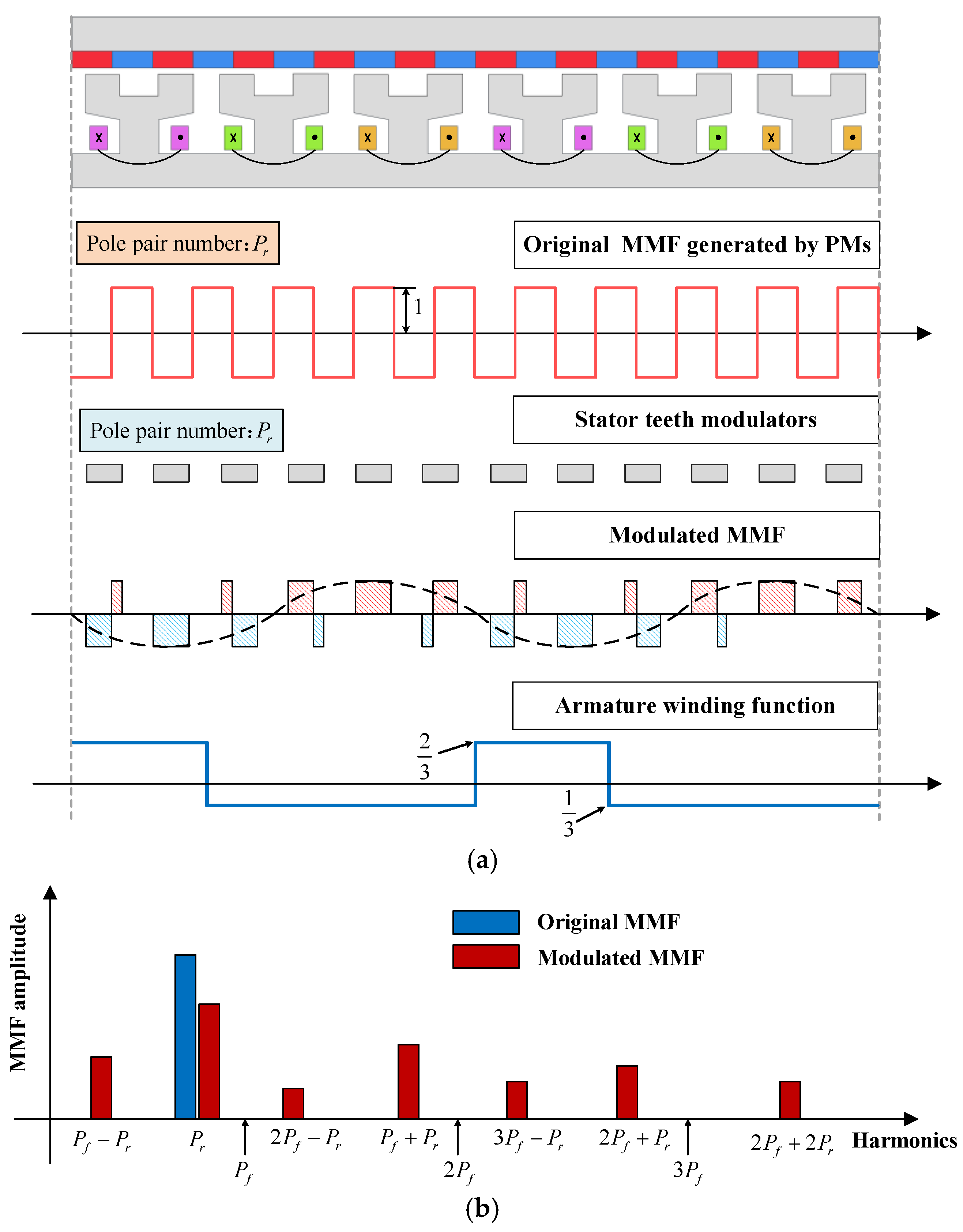
2.2. Working Principles of PMVM from the Prospect of Air-Gap Field Modulation Theory
3. Methods for Increasing the Torque of PMVM
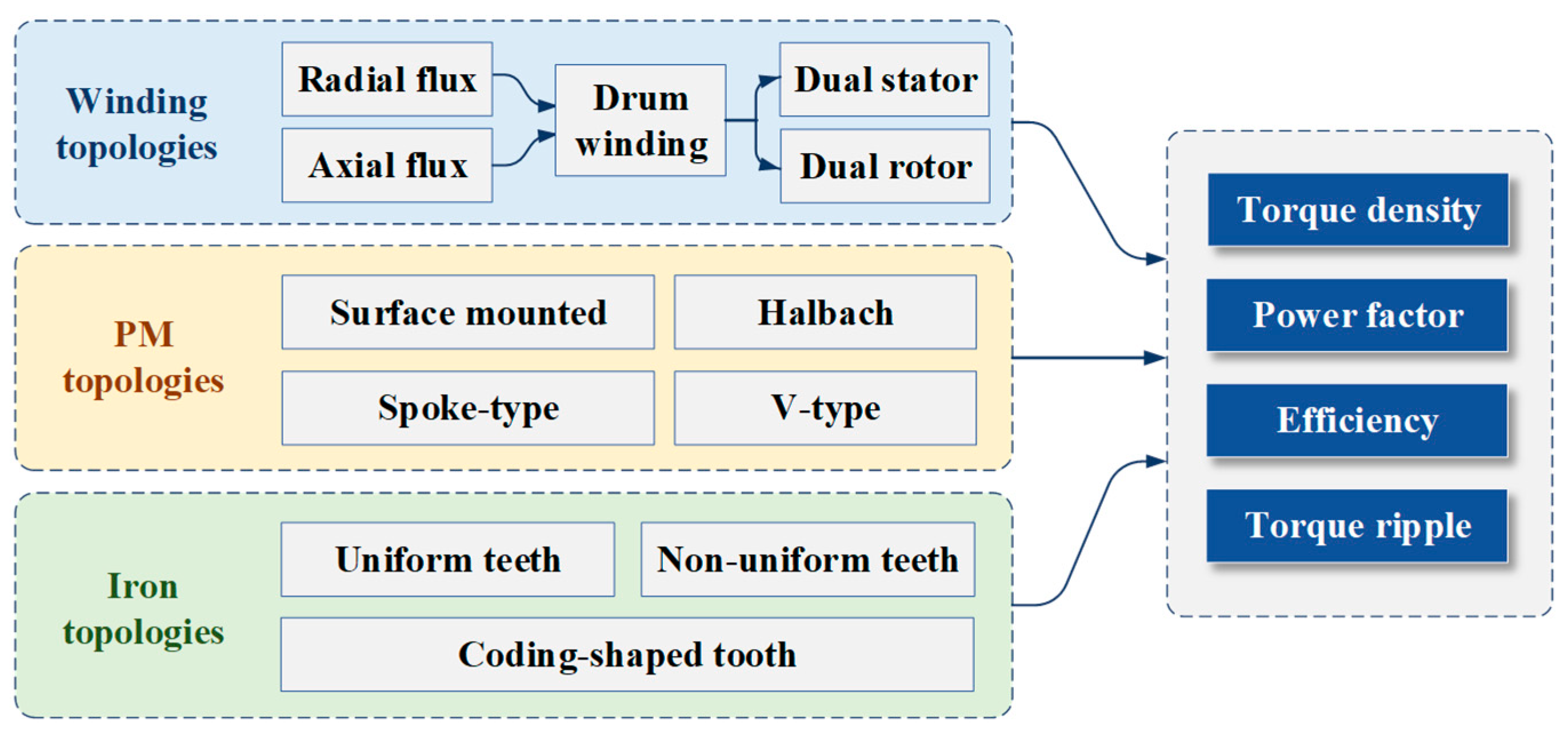
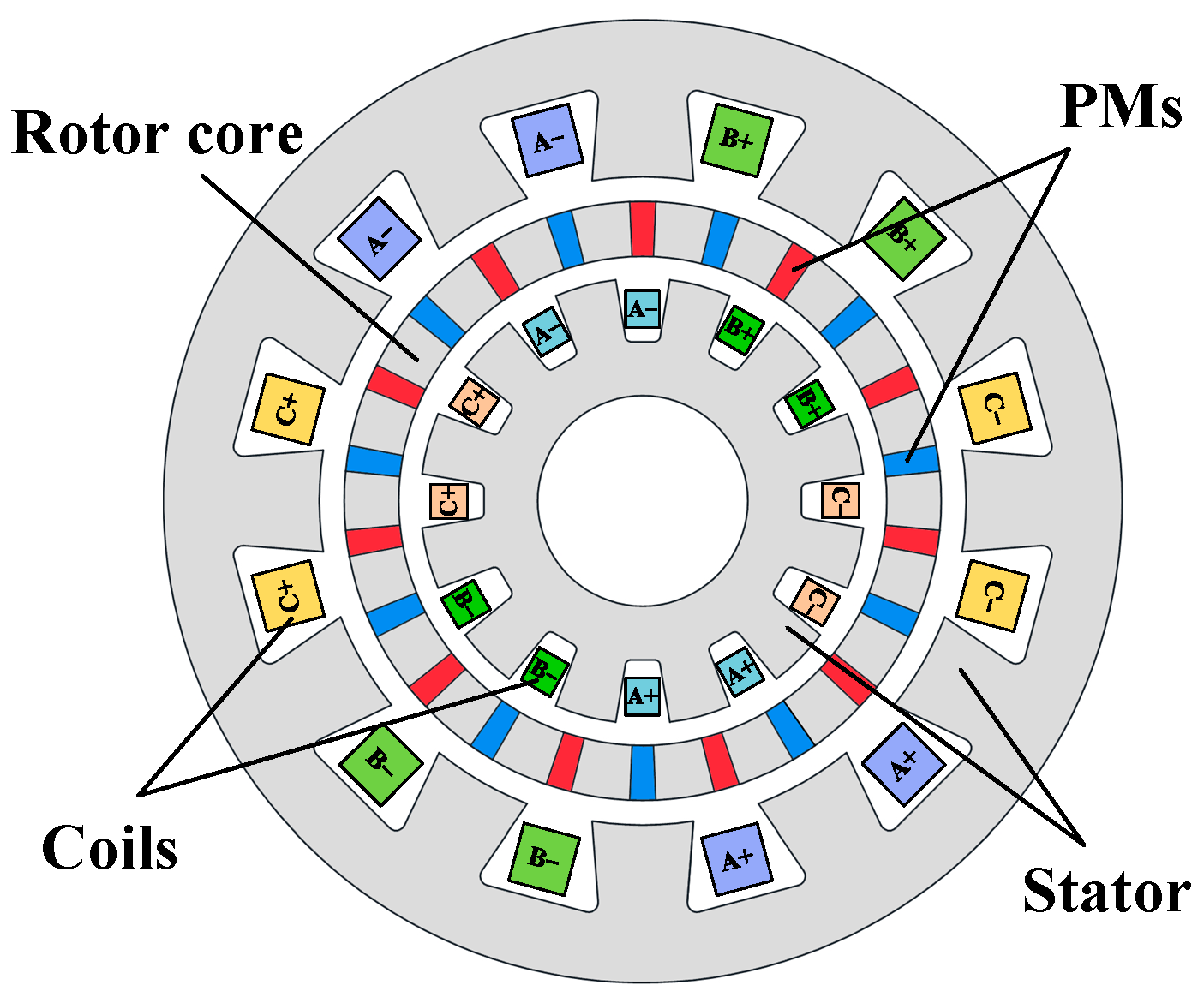
3.1. Winding Type
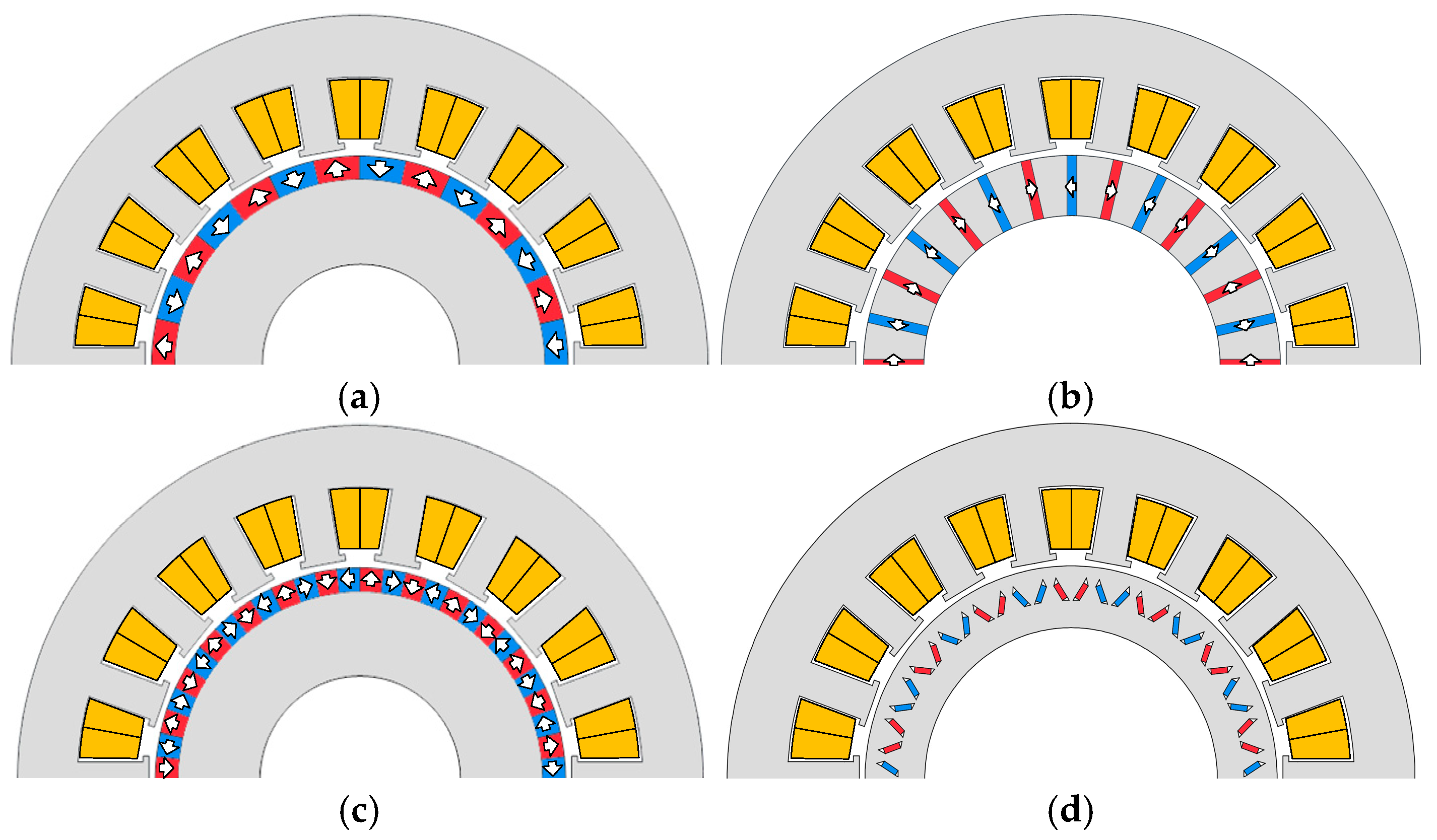
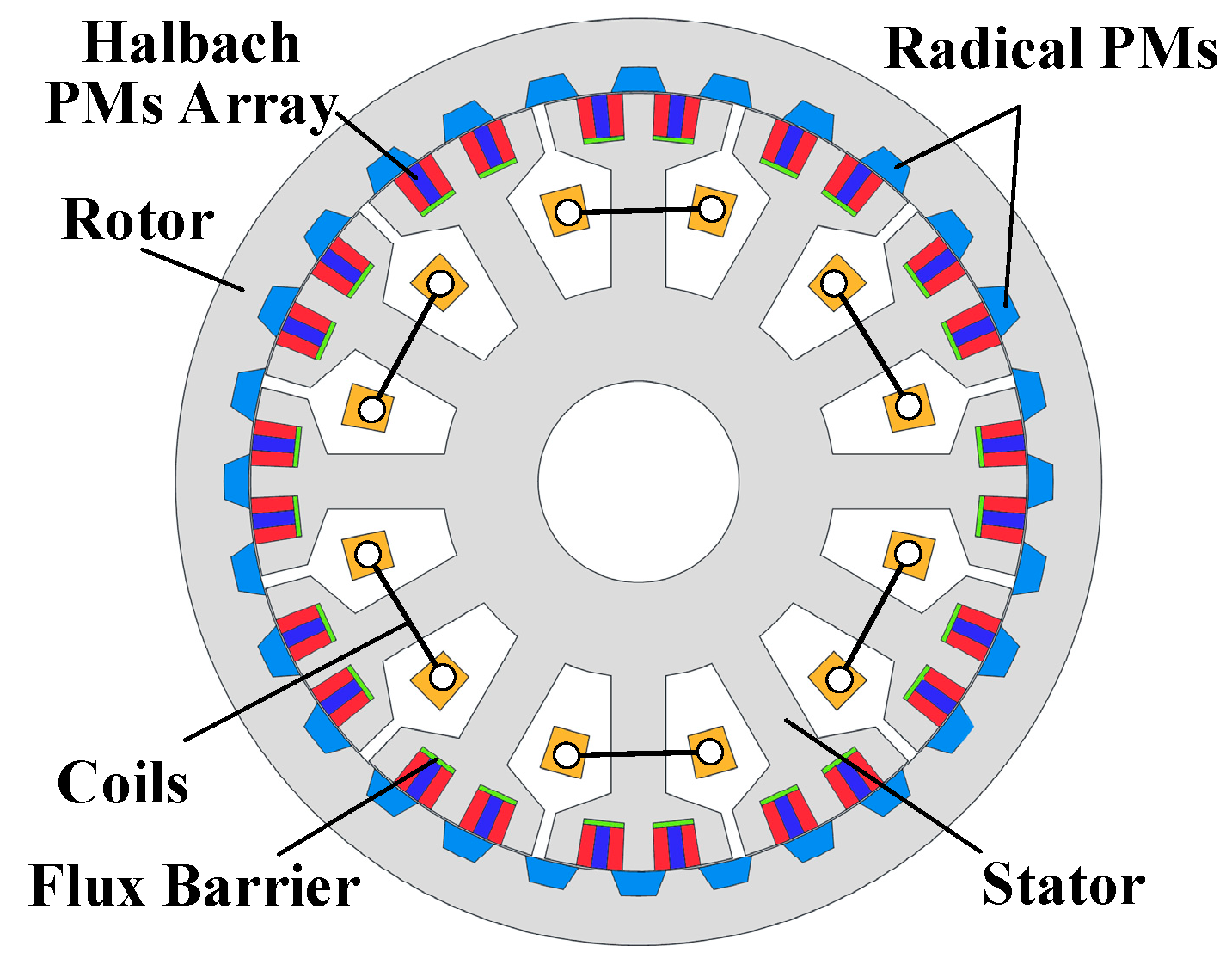
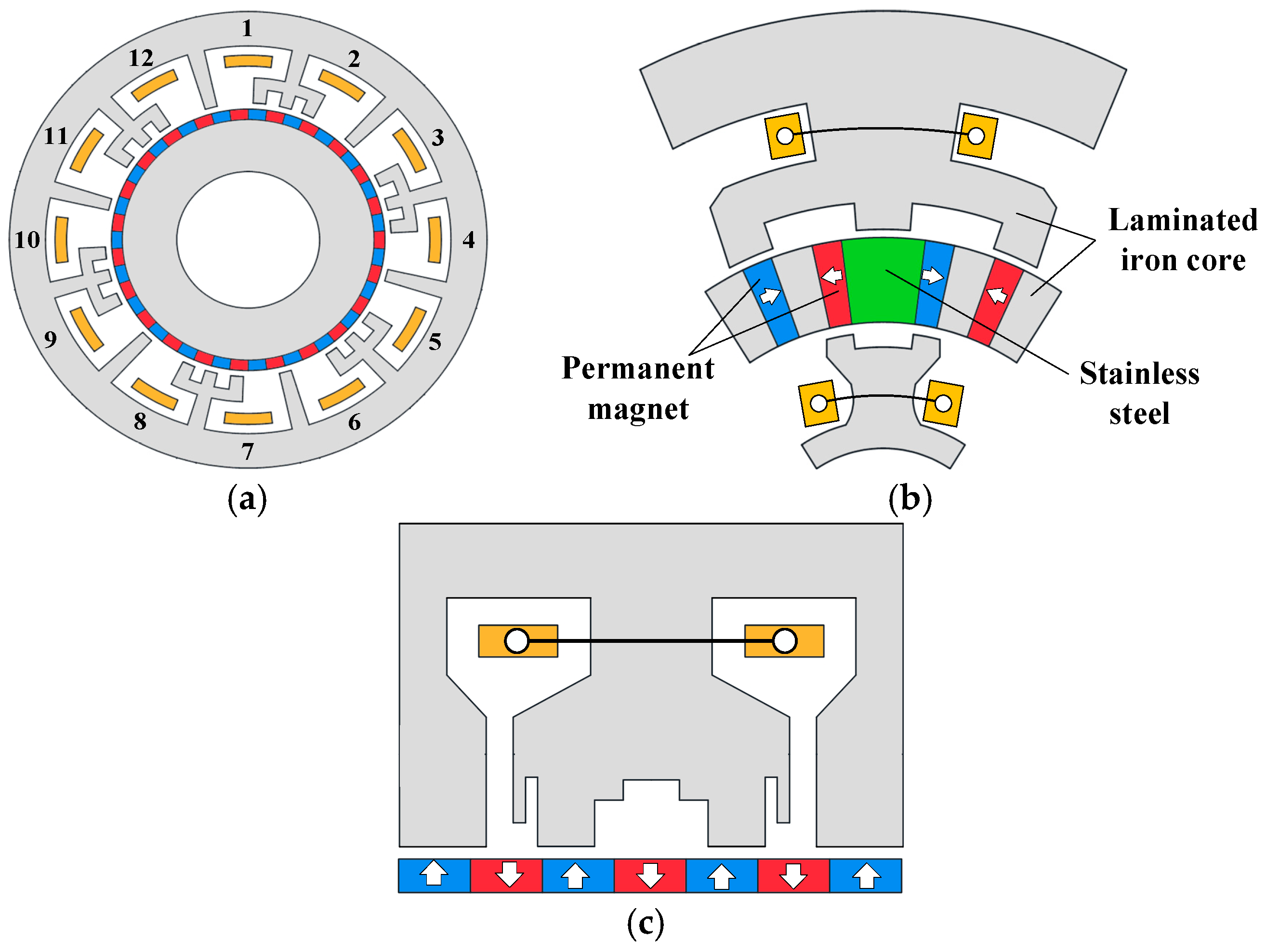
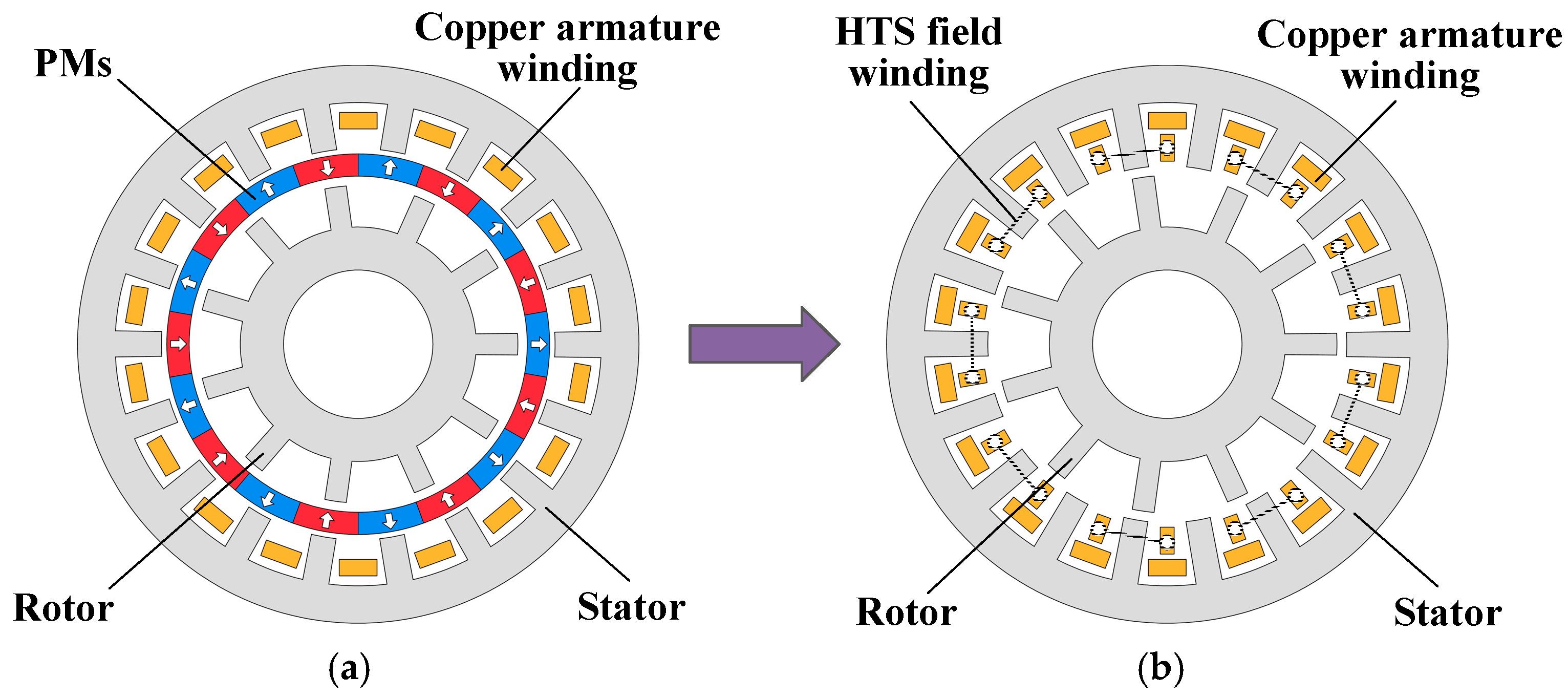
3.2. Permanent Magnet Type
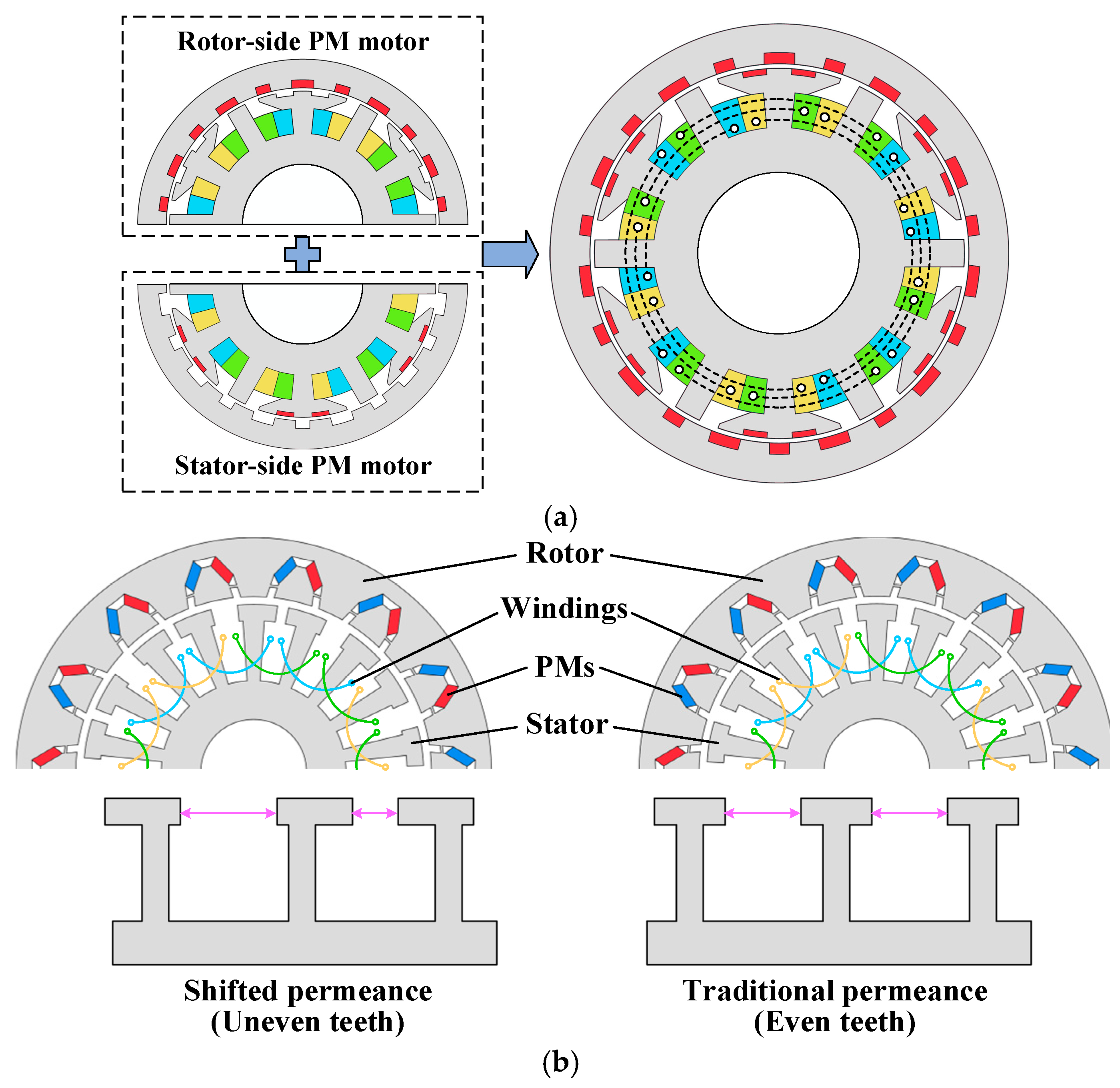
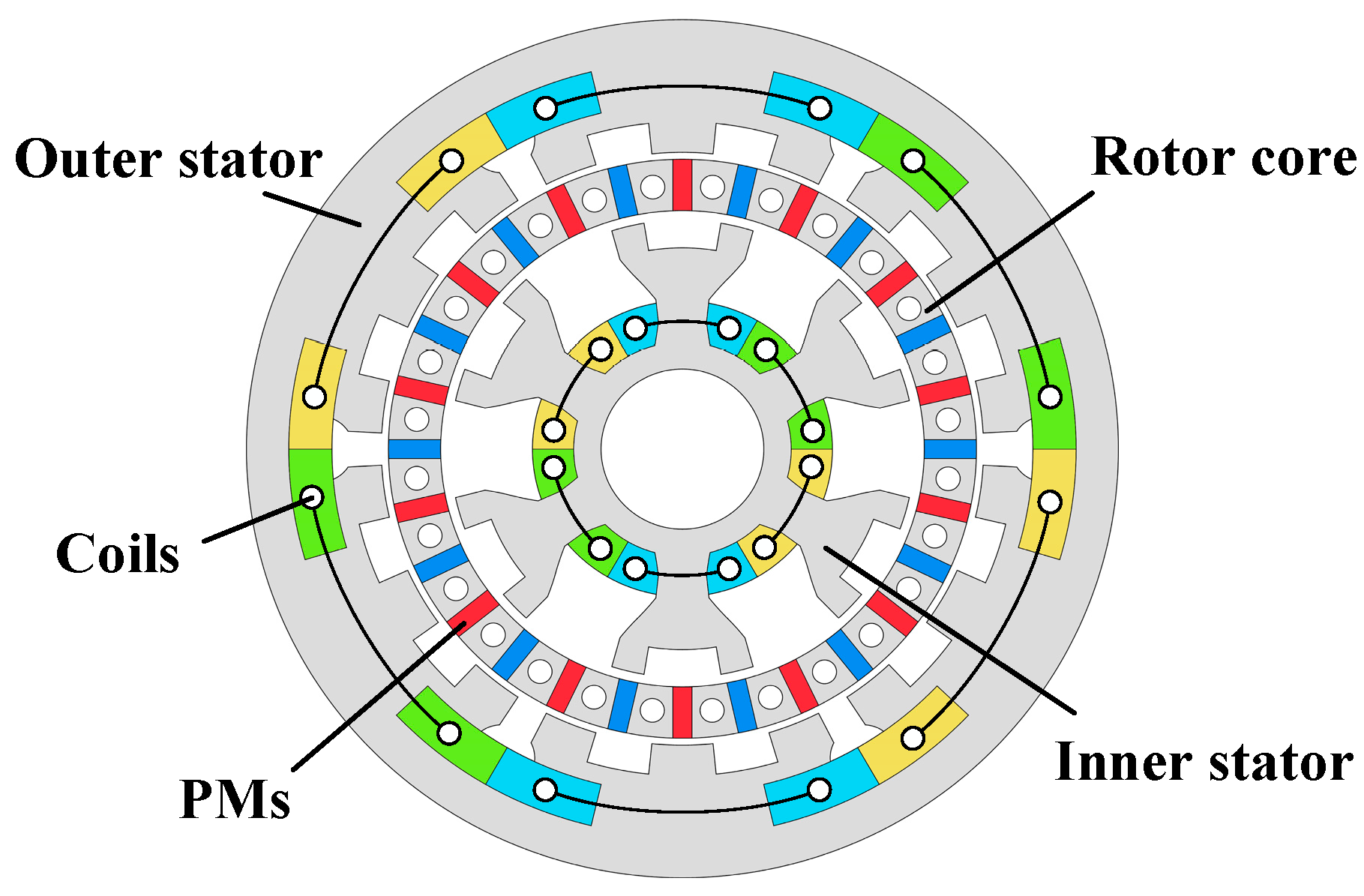
3.3. Stator Core Shape
3.4. Comprehensive Comparison of the Typical PM Motors
4. Challenges and Optimization Methods for PMVM
4.1. Challenges and Limitations of PMVMs
- Low power factor: PMVMs often exhibit a relatively low power factor due to the magnetic gearing effect, which leads to inefficient utilization of the input electrical power.
- Complex structure: The motor’s intricate design, including flux-modulation poles and specialized stator–rotor configurations, increases manufacturing difficulty and cost.
- High dependence on rare-earth magnets: PMVMs typically require a large number of small-sized rare-earth permanent magnets, such as NdFeB, which are expensive and sensitive to temperature.
- Manufacturing and assembly challenges: The use of many small magnet segments demands high precision in machining, alignment, and assembly, complicating large-scale production.
- Thermal management issues: Due to high flux density and concentrated magnetic fields, PMVMs may face localized heating, requiring effective thermal management strategies.
- Limited experimental validation: Many PMVM designs are still in the research or prototype stage, with limited validation under real-world load variations and long-term operation.
4.2. Improving Power Factor
4.3. Reducing Torque Ripple
4.4. Reducing Costs
5. Applications of PMVM
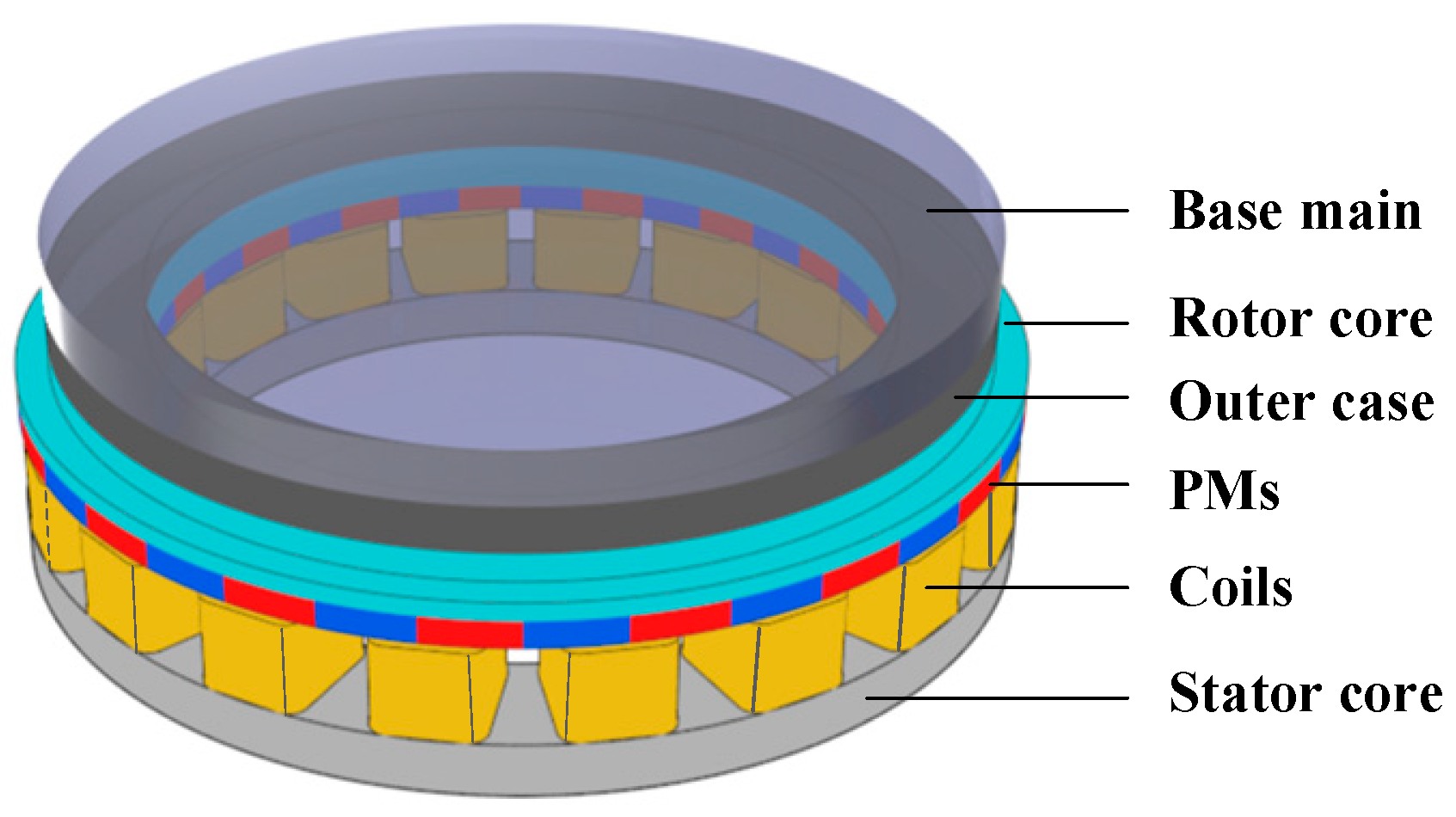
5.1. Robotics Automation and Servo Systems
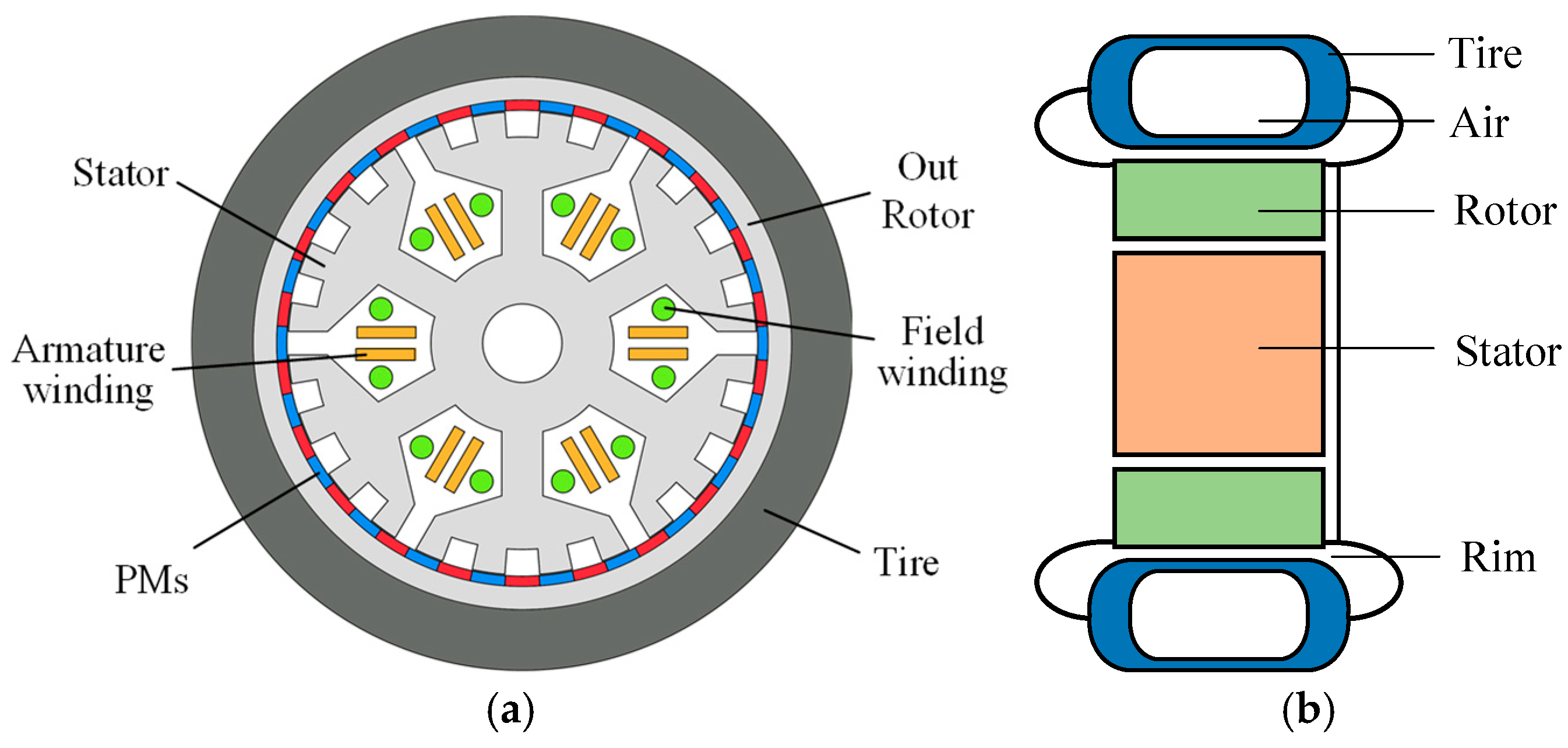
5.2. In-Wheel Drive for Electric Vehicles and Marine Propulsion
5.3. Wind Power Generation
5.4. Limitations of PMVMs in Real-World Scenarios
6. Outlook of Future Development for PMVM
6.1. Air-Gap Field Modulation Theory
6.2. Multiphysics Coupled Analysis
6.3. The Use of Novel Materials
6.4. Predictions and Suggestions
- In robotics:PMVMs can provide the high torque density and precision control required for sophisticated robotic arms, exoskeletons, and mobile robots. A potential innovation in this field could be the development of compact, high-torque actuators that enable robots to perform more complex and precise movements in confined spaces, such as in microsurgical applications or advanced industrial automation. Another breakthrough could involve the integration of PMVMs with artificial intelligence (AI) algorithms to enable real-time adaptive control, allowing robots to autonomously adjust their movements based on environmental feedback, enhancing versatility and precision.
- In new energy:PMVMs can be integral to renewable energy generation systems, such as wind turbines and solar tracking systems. An innovative point could be the development of high-efficiency PMVMs with integrated energy harvesting systems that can optimize energy conversion even under fluctuating conditions. Additionally, advancements in self-healing magnetic materials could increase the durability of PMVMs in harsh environmental conditions, such as those found in offshore wind farms or remote solar installations. A further innovation might be smart grid integration, where PMVMs are used in energy storage systems to improve grid stability and reliability by efficiently adjusting to varying load demands.
- In automation:PMVMs can drive industrial machinery and automated production lines with improved energy efficiency and reduced maintenance costs. A potential innovation in this domain could involve the development of distributed PMVM-based systems that can be easily integrated into modular, flexible manufacturing setups, allowing for highly adaptable and scalable production lines. Another breakthrough could be advanced thermal management systems that enhance the performance and longevity of PMVMs in high-load industrial applications, addressing one of the key challenges in automation. Furthermore, the use of smart sensors and IoT connectivity could enable predictive maintenance, reducing downtime and improving overall operational efficiency.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sankhwar, P. Application of permanent magnet synchronous motor for electric vehicle. Indian J. Des. Eng. 2024, 4, 1–6. [Google Scholar] [CrossRef]
- Shen, J.; Wang, X.; Zhang, Z.; Ren, S.; Ma, D.; Xiao, D. Research on the application of dual three-phase PMSM in renewable energy system. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS), Zhuhai, China, 5–8 November 2023; pp. 3475–3479. [Google Scholar]
- Kashif, M.; Singh, B. Design and geometric optimization of spoke-type PMSM for solar PV based water pump. In Proceedings of the 2020 IEEE 7th Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering (UPCON), Prayagraj, India, 27–29 November 2020; pp. 1–6. [Google Scholar]
- Fu, W.N.; Ho, S.L. A quantitative comparative analysis of a novel flux-modulated permanent-magnet motor for low-speed drive. IEEE Trans. Magn. 2010, 46, 127–134. [Google Scholar] [CrossRef]
- Lee, C.H. Vernier motor and its design. IEEE Trans. Power App. Syst. 1963, 82, 343–349. [Google Scholar] [CrossRef]
- Rhodes, D.J. Assessment of vernier motor design using generalized machine concepts. IEEE Trans. Power App. Syst. 1977, 96, 1346–1352. [Google Scholar] [CrossRef]
- Ishizaki, A.; Tanaka, T.; Takasaki, K.; Nishikata, S. Theory and optimum design of PM Vernier motor. In Proceedings of the 1995 Seventh International Conference on Electrical Machines and Drives, Durham, UK, 11–13 September 1995; pp. 208–212. [Google Scholar]
- Toba, A.; Lipo, T.A. Novel dual-excitation permanent magnet Vernier machine. In Proceedings of the Conference Record of the 1999 IEEE Industry Applications Conference, Phoenix, AZ, USA, 3–7 October 1999; pp. 2539–2544. [Google Scholar]
- Atallah, K.; Howe, D. A novel high-performance magnetic gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef]
- Rasmussen, P.O.; Andersen, T.O.; Jorgensen, F.T.; Nielsen, O. Development of a high-performance magnetic gear. IEEE Trans. Ind. Appl. 2005, 41, 764–770. [Google Scholar] [CrossRef]
- Li, X.; Chau, K.T.; Cheng, M.; Hua, W.; Du, Y. An improved coaxial magnetic gear using flux focusing. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–4. [Google Scholar]
- Uppalapati, K.K.; Bomela, W.B.; Bird, J.Z.; Calvin, M.D.; Wright, J.D. Experimental evaluation of low-speed flux-focusing magnetic gearboxes. IEEE Trans. Ind. Appl. 2014, 50, 3637–3643. [Google Scholar] [CrossRef]
- Yin, X.; Pfister, P.-D.; Fang, Y. A novel magnetic gear: Toward a higher torque density. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Atallah, K.; Calverley, S.D.; Howe, D. Design, analysis and realization of a high-performance magnetic gear. IEE Proc.-Electr. Power Appl. 2004, 151, 135–143. [Google Scholar] [CrossRef]
- Toba, A.; Lipo, T.A. Generic torque-maximizing design methodology of surface permanent-magnet vernier machine. IEEE Trans. Ind. Appl. 2000, 36, 1539–1546. [Google Scholar]
- Cheng, M.; Han, P.; Du, Y.; Wen, H.; Li, X. A general air gap field modulation theory for electrical machines. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 1712–1732. [Google Scholar] [CrossRef]
- Xu, G.; Jian, L.; Gong, W.; Zhao, W. Quantitative comparison of flux-modulated interior permanent magnet machines with distributed windings and concentrated windings. Prog. Electromagn. Res. 2012, 129, 109–123. [Google Scholar] [CrossRef]
- Qu, R.; Li, D.; Wang, J. Relationship between magnetic gears and vernier machines. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–6. [Google Scholar]
- Zou, T.; Li, D.; Qu, R.; Jiang, D.; Li, J. Advanced high torque density PM vernier machine with multiple working harmonics. IEEE Trans. Ind. Appl. 2017, 53, 5295–5304. [Google Scholar] [CrossRef]
- Chung, S.-U.; Kim, J.-W.; Woo, B.-C.; Hong, D.-K.; Lee, J.-Y.; Koo, D.-H. A novel design of modular three-phase permanent magnet vernier machine with consequent pole rotor. IEEE Trans. Magn. 2011, 47, 4215–4218. [Google Scholar] [CrossRef]
- Cheng, M.; Han, P.; Hua, W. General airgap field modulation theory for electrical machines. IEEE Trans. Ind. Electron. 2017, 64, 6063–6074. [Google Scholar] [CrossRef]
- Cheng, M.; Wen, H.; Han, P.; Zhu, X. Analysis of airgap field modulation principle of simple salient poles. IEEE Trans. Ind. Electron. 2019, 66, 2628–2638. [Google Scholar] [CrossRef]
- Yu, Y.; Chai, F.; Pei, Y.; Chen, L. Comparisons of torque performance in surface-mounted PM vernier machines with different stator tooth topologies. IEEE Trans. Ind. Appl. 2019, 55, 3671–3684. [Google Scholar] [CrossRef]
- Zou, T.; Qu, R.; Li, J.; Li, D. Analysis and design of a dual-rotor axial-flux vernier permanent magnet machine. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 3906–3913. [Google Scholar]
- Allahyari, A.; Torkaman, H. A novel high-performance consequent pole dual rotor permanent magnet vernier machine. IEEE Trans. Energy Convers. 2020, 35, 1238–1246. [Google Scholar] [CrossRef]
- Zhao, F.; Lipo, T.A.; Kwon, B.-I. A novel dual-stator axial-flux spoke-type permanent magnet vernier machine for direct-drive applications. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Kwon, J.-W.; Kwon, B.-I. Investigation of dual-stator spoke-type vernier machine for EV application. IEEE Trans. Magn. 2018, 54, 8206505. [Google Scholar] [CrossRef]
- Kim, B.; Lipo, T.A. Design of a surface PM vernier motor for a practical variable speed application. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 776–783. [Google Scholar]
- Yu, Y.; Chai, F.; Pei, Y.; Zhu, J.; Xie, S.; Cao, L.; Lee, C.H.T. Investigation of a novel phase-unit axial-modular permanent magnet vernier machine with integral-slot non-overlapping concentrated windings. IEEE Trans. Ind. Appl. 2024, 60, 6144–6157. [Google Scholar] [CrossRef]
- Li, D.; Qu, R.; Xu, W.; Li, J.; Lipo, T.A. Design process of dual-stator, spoke-array vernier permanent magnet machines. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 2350–2357. [Google Scholar]
- Yu, Y.; Chai, F.; Pei, Y.; Doppelbauer, M. Investigation of PM loss in spoke-type permanent magnet vernier motors with different stator topologies for in-wheel direct drive. IEEE Trans. Ind. Appl. 2022, 58, 4562–4574. [Google Scholar] [CrossRef]
- Jing, L.; Kui, Z.; Yang, K.; Min, Z. Characteristic analysis and optimization of U-PM vernier machine with alternating flux bridge. J. Electr. Eng. Technol. 2023, 18, 281–290. [Google Scholar] [CrossRef]
- Li, Y.; Jing, L. Analysis and optimization of a novel dual PM vernier machine with Halbach array. J. Electr. Eng. Technol. 2023, 18, 4159–4167. [Google Scholar] [CrossRef]
- Li, Y.; Jing, L. Design and research of novel consequent-pole dual PM vernier machines with spoke and Halbach array. J. Electr. Eng. Technol. 2024, 19, 2987–2994. [Google Scholar] [CrossRef]
- Kataoka, Y.; Takayama, M.; Matsushima, Y.; Anazawa, Y. Design of surface permanent magnet-type vernier motor. In Proceedings of the 2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 21–24 October 2012; pp. 1–6. [Google Scholar]
- Wei, L.; Nakamura, T. A novel dual-stator hybrid excited permanent magnet vernier machine with Halbach-array PMs. IEEE Trans. Magn. 2021, 57, 1–5. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, X.; Quan, L.; Xiang, Z.; Du, Y.; Bu, X. A V-shaped PM vernier motor with enhanced flux-modulated effect and low torque ripple. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar] [CrossRef]
- Shen, F.; Yan, Y.; Shih Onn, B.C.; Gajanayake, C.J.; Wang, S.; Lee, C.H.T. Analysis of a vernier machine with spoke-V array permanent magnets. In Proceedings of the IECON 2022—48th Annual Conference of the IEEE Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022; pp. 1–6. [Google Scholar]
- Zhao, W.; Sun, X.; Ji, J.; Liu, G. Design and analysis of new vernier permanent-magnet machine with improved torque capability. IEEE Trans. Appl. Supercond. 2016, 26, 5201505. [Google Scholar] [CrossRef]
- Li, D.; Cao, Y.; Wang, B. Analysis and design of a new type of polymer-magnet permanent magnet fault-tolerant vernier motor. In Proceedings of the 2024 IEEE 7th International Electrical and Energy Conference (CIEEC), Harbin, China, 10–12 May 2024; pp. 4517–4522. [Google Scholar]
- Zou, T.; Li, D.; Qu, R.; Li, J.; Jiang, D. Analysis of a dual-rotor, toroidal-winding, axial-flux vernier permanent magnet machine. IEEE Trans. Ind. Appl. 2017, 53, 1920–1930. [Google Scholar] [CrossRef]
- Ahmad, I.; Ikram, J.; Yousuf, M.; Badar, R.; Bukhari, S.S.H.; Ro, J. Performance improvement of multi-rotor axial flux vernier permanent magnet machine by permanent magnet shaping. IEEE Access 2021, 9, 143188–143197. [Google Scholar] [CrossRef]
- He, Z.; Xiao, F.; Du, Y.; Zhu, X. Comparison of permanent magnet vernier motors with evenly and unevenly distributed modulation teeth. IEEE Trans. Magn. 2023, 59, 1–5. [Google Scholar] [CrossRef]
- Park, J.H.; Lukman, G.F.; Kang, D.; Ahn, J.-W. Optimization of non-uniform flux modulation poles of a dual-stator permanent magnet vernier machine for performance improvement. J. Electr. Eng. Technol. 2022, 17, 2203–2211. [Google Scholar] [CrossRef]
- Yang, G.; Li, J.; Lin, M. Design and analysis of novel modular stator axial-flux permanent magnet vernier machine with improved power factor. IEEE Access 2023, 11, 108580–108590. [Google Scholar] [CrossRef]
- Fang, L.; Li, D.; Ren, X.; Qu, R. A novel permanent magnet vernier machine with coding-shaped tooth. IEEE Trans. Ind. Electron. 2022, 69, 6058–6068. [Google Scholar] [CrossRef]
- Yanlei, Y.; Feng, C.; Yulong, P.; Xi, Z.; Lee, C.H.T. Comparative study of thermal characteristic in permanent magnet synchronous machine and vernier machine for in-wheel drive. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS), Zhuhai, China, 5–8 November 2023; pp. 1218–1222. [Google Scholar]
- Liu, Y.; Li, H.Y.; Zhu, Z.Q. A high-power factor vernier machine with coil pitch of two slot pitches. IEEE Trans. Magn. 2018, 54, 8206505. [Google Scholar] [CrossRef]
- Wu, L.; Qu, R. A novel dual-stator vernier permanent magnet machine with improved power factor. IEEE Trans. Ind. Appl. 2022, 58, 3486–3496. [Google Scholar] [CrossRef]
- Jia, S.; Qu, R.; Li, J.; Li, D.; Fang, H. Hybrid excited vernier PM machines with novel DC-biased sinusoidal armature current. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Thyroff, D.; Hahn, I. Optimization of the flux modulation poles for vernier machines with concentrated windings. In Proceedings of the 2017 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Nottingham, UK, 20–21 April 2017; pp. 113–118. [Google Scholar]
- Thyroff, D.; Hittinger, C.; Hahn, I. Analytic power factor calculation for vernier machines with concentrated windings. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–6. [Google Scholar]
- Kim, S.-J.; Kim, C.-H.; Jung, S.-Y.; Kim, Y.-J. Optimal design of novel pole piece for power density improvement of magnetic gear using polynomial regression analysis. IEEE Trans. Energy Convers. 2015, 30, 1171–1179. [Google Scholar] [CrossRef]
- Nakagawa, H.; Sato, T.; Todaka, T. Development of a new stator module type vernier motor utilizing amorphous cut core. In Proceedings of the 2018 IEEE International Magnetics Conference (INTERMAG), Singapore, 23–27 April 2018; pp. 1–5. [Google Scholar]
- Zhao, Y.; Ren, X.; Fan, X.; Li, D.; Qu, R. A high power factor permanent magnet vernier machine with modular stator and yokeless rotor. IEEE Trans. Ind. Electron. 2023, 70, 7141–7152. [Google Scholar] [CrossRef]
- Xiang, Z.; Gui, S.; Zhu, X.; Wei, J.; Quan, L.; Chen, K. Design and analysis of a high torque performance dual-side PM vernier motor with synergetic modulation enhancement. IEEE Trans. Magn. 2024, 60, 8204807. [Google Scholar] [CrossRef]
- Wang, T.; Zhu, X.; Xiang, Z.; Fan, D.; Quan, L. Torque ripple suppression of a permanent magnet vernier motor from perspective of shifted air-gap permeance distribution. IEEE Trans. Magn. 2022, 58, 8203006. [Google Scholar] [CrossRef]
- Xiang, Z.; Wei, J.; Zhu, X. Torque ripple suppression of a PM vernier machine from perspective of time and space harmonic magnetic field. IEEE Trans. Ind. Electron. 2024, 71, 10150–10161. [Google Scholar] [CrossRef]
- Cetin, E.; Daldaban, F. Analyzing the profile effects of the various magnet shapes in axial flux PM motors by means of 3D-FEA. Electronics 2018, 7, 13. [Google Scholar] [CrossRef]
- Yousuf, M.; Khan, F.; Ikram, J.; Badar, R.; Bukhari, S.S.H.; Ro, J. Reduction of torque ripples in multi-stack slotless axial flux machine by using right angled trapezoidal permanent magnet. IEEE Access 2021, 9, 22760–22773. [Google Scholar] [CrossRef]
- Fan, Y.; Mei, Y.; Zhang, Q. Torque ripple reduction of outer rotor permanent magnet vernier machine with concentrated winding. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 543–549. [Google Scholar]
- Li, R.; Shi, C.; Qu, R.; Li, D.; Ren, X.; Fedida, V.; Zhou, Y. A novel modular stator fractional pole-pair permanent-magnet vernier machine with low torque ripple for servo applications. IEEE Trans. Magn. 2021, 57, 8102406. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, J.; Hu, Z.; Xiao, J.; Zhou, L.; Wang, H. Design of consequent pole permanent magnet vernier motor for downhole electric drilling system. In Proceedings of the 2021 IEEE 4th Student Conference on Electric Machines and Systems (SCEMS), Huzhou, China, 1–3 December 2021; pp. 1–6. [Google Scholar]
- Siddiqi, M.R.; Humza, M.; Yazdan, T.; Hur, J. Cost-effective design of dual airgap permanent magnet vernier machine having a yokeless consequent pole rotor. IEEE Access 2024, 12, 108224–108232. [Google Scholar] [CrossRef]
- Baloch, N.; Kwon, B.-I.; Gao, Y. Low-cost high-torque-density dual-stator consequent-pole permanent magnet vernier machine. IEEE Trans. Magn. 2018, 54, 8206105. [Google Scholar] [CrossRef]
- Kang, M.; Xu, L.; Ji, J.H.; Zhu, X.H. Design and analysis of a high torque density hybrid permanent magnet excited vernier machine. Energies 2022, 15, 1723. [Google Scholar] [CrossRef]
- Rehman, A.; Kim, B. Characteristics analysis of consequent-pole ferrite magnet vernier machine using novel equivalent magnetic circuit. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 1823–1833. [Google Scholar] [CrossRef]
- Gong, C.; Deng, F. Demagnetization analysis of a split-tooth concentrated-winding vernier machine using Halbach-array-based ferrite magnets. In Proceedings of the 2021 IEEE International Electric Machines & Drives Conference (IEMDC), Hartford, CT, USA, 17–20 May 2021; pp. 1–6. [Google Scholar]
- Lee, C.H.T.; Chau, K.T.; Liu, C. Design and analysis of an electronic-geared magnetless machine for electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6705–6714. [Google Scholar] [CrossRef]
- Woo, H.; Kang, D.; Oh, Y.; Park, G.-S. Design and characteristics analysis of double air-gap vernier motor with high torque for robot gripper. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS), Zhuhai, China, 5–8 November 2023; pp. 2921–2925. [Google Scholar]
- Duong, M.-T.; Luu, T.-P.; Do, T.D.; Perriard, Y. Design of high torque density permanent magnet motors and drives for collaborative robot applications. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October 2021–3 November 2021. [Google Scholar]
- Yu, J.; Liu, C. Design of a double-stator magnetless vernier machine for direct-drive robotics. IEEE Trans. Magn. 2018, 54, 8105805. [Google Scholar] [CrossRef]
- Zhao, F.; Kim, M.-S.; Kwon, B.-I.; Baek, J.-H. A small axial-flux vernier machine with ring-type magnets for the auto-focusing lens drive system. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Muteba, M. Performance evaluation of a four-port PM vernier motor for hybrid electric vehicles. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 345–350. [Google Scholar]
- Liu, C. Design of a new outer-rotor flux-controllable vernier PM in-wheel motor drive for electric vehicle. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–6. [Google Scholar]
- Pei, Y.; Yu, Y.; Chai, F.; Yu, Y. Design and comparative analysis of a novel PM vernier motor with trapezoidal magnets and flux barriers for in-wheel traction application. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar]
- Mohammadi, A.; Chulaee, Y.; Cramer, A.M.; Boldea, I.; Ionel, D.M. Axial flux permanent magnet vernier machine with single-wound dual-stator and spoke permanent magnet rotor for electric vehicle in-wheel traction. In Proceedings of the 2023 IEEE Transportation Electrification Conference & Expo (ITEC), Detroit, MI, USA, 21–23 June 2023; pp. 1–5. [Google Scholar]
- Mohammadi, A.; Cramer, A.M.; Ionel, D.M. Comparative analysis of vernier machines with spoke, surface mounted, and Halbach PM rotors for in-wheel traction. In Proceedings of the 2024 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 19–21 June 2024; pp. 1–6. [Google Scholar]
- Xu, L.; Liu, G.; Zhao, W.; Ji, J. Stator-excited vernier high-temperature superconducting machine for direct drive propulsion. IEEE Trans. Appl. Supercond. 2016, 26, 5207505. [Google Scholar] [CrossRef]
- Yu, Y.; Chai, F.; Pei, Y.; Lee, C.H.T. A novel axial-flux permanent magnet vernier machine with H-core stator modules and toroidal windings for electric aircraft propulsion system. In Proceedings of the 2024 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Xi’an, China, 10–13 October 2024; pp. 712–717. [Google Scholar]
- Yu, J.; Mi, W.; Cai, Z.; Song, Z.; Liu, S.; Liu, C. Design principle considering structural mutual effects of double-stator V-shape-PM vernier machines for electric ship propulsion. IEEE Trans. Transp. Electrif. 2024, 10, 496–508. [Google Scholar] [CrossRef]
- Cai, Y.; Zhu, J.; Liu, Q. Slot-pole combination and optimization of a flux-concentrating fault-tolerant permanent magnet vernier rim-driven motor. In Proceedings of the 2024 IEEE 7th International Electrical and Energy Conference (CIEEC), Harbin, China, 10–12 May 2024; pp. 1830–1835. [Google Scholar]
- Tlali, P.M.; Wang, R.-J. PM vernier machine for utility scale wind generator applications: Design and evaluation. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 2637–2643. [Google Scholar]
- Li, X.; Chau, K.T.; Cheng, M. Analysis, design and experimental verification of a field-modulated permanent-magnet machine for direct-drive wind turbines. IET Electr. Power Appl. 2015, 9, 150–159. [Google Scholar] [CrossRef]
- Tlali, P.M.; Wang, R.-J.; Gerber, S. Comparison of PM vernier and conventional synchronous 15 kW wind generators. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 2065–2071. [Google Scholar]
- Gao, Y.; Qu, R.; Li, D.; Li, J.; Zhou, G. Design of a dual-stator LTS vernier machine for direct-drive wind power generation. IEEE Trans. Appl. Supercond. 2016, 26, 5204505. [Google Scholar] [CrossRef]
- Mao, Y.; Zhao, W.; Zhu, S.; Chen, Q.; Ji, J. Vibration investigation of spoke-type PM machine with asymmetric rotor considering modulation effect of stator teeth. IEEE Trans. Ind. Electron. 2021, 68, 9092–9103. [Google Scholar] [CrossRef]
- Zhu, S.; Zhao, W.; Ji, J.; Liu, G.; Mao, Y.; Liu, T. Investigation of bread-loaf magnet on vibration performance in FSCW PMSM considering force modulation effect. IEEE Trans. Transp. Electrif. 2021, 7, 1379–1389. [Google Scholar] [CrossRef]
- Li, W.; Ching, T.W.; Chau, K.T.; Lee, C.H.T. A superconducting vernier motor for electric ship propulsion. IEEE Trans. Appl. Supercond. 2018, 28, 1–6. [Google Scholar] [CrossRef]
- Liu, C.; Wang, K.; Wang, S.; Niu, F.; Wang, Y. Analysis and design optimization of a low-cost axial flux vernier machine with SMC cores and ferrite magnets. Electr. Eng. 2020, 102, 2595–2604. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Permanent Magnet Vernier Motor (PMVM) | Brushless DC Motor (BLDC) | Permanent Magnet Synchronous Motor (PMSM) | PM Assistant Synchronous Reluctance Motor (PMaSynRM) |
|---|---|---|---|---|
| Efficiency | High | High | High | Medium |
| Torque density | High | Low | High | Medium to high |
| Power factor | Low | High | High | Medium to high |
| Suitable condition | Low-speed, High-torque | High-speed, Low-torque | Precision control | High-speed, Low-torque |
| Control method | Precision control | Simple, suitable for high-speed applications | Precision control | Complex control strategy |
| Cost | High Complex structure | Low Mature technology | Medium to High Rare-earth PM material | Medium Complex control system |
| Applications | Precision positioning, automation, robotics | High-speed power tools, electric vehicles, home appliances | High-precision servos, industrial automation, robotics | Electric vehicles, wind power generation |
| Disadvantages | Complex structure, low power factor, high manufacturing cost | Poor adaptability, performance instability with load changes | High cost, complex design and control | High control requirements, complex design, difficult startup |
| Future research directions | Improve power factor, expand operational range, reduce cost | Improve control precision, increase load adaptability | Enhance feasibility for high-power applications, optimize control strategies | Improve control precision, reduce torque ripple, and adapt to more application fields |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Guo, X.; Zhou, J.; Hua, W. Review on the Development and Applications of Permanent Magnet Vernier Motors. Energies 2025, 18, 2353. https://doi.org/10.3390/en18092353
Zhang G, Guo X, Zhou J, Hua W. Review on the Development and Applications of Permanent Magnet Vernier Motors. Energies. 2025; 18(9):2353. https://doi.org/10.3390/en18092353
Chicago/Turabian StyleZhang, Gan, Xiaoye Guo, Junjie Zhou, and Wei Hua. 2025. "Review on the Development and Applications of Permanent Magnet Vernier Motors" Energies 18, no. 9: 2353. https://doi.org/10.3390/en18092353
APA StyleZhang, G., Guo, X., Zhou, J., & Hua, W. (2025). Review on the Development and Applications of Permanent Magnet Vernier Motors. Energies, 18(9), 2353. https://doi.org/10.3390/en18092353