
Speed Estimation Method of Active Magnetic Bearings Magnetic Levitation Motor Based on Adaptive Sliding Mode Observer


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
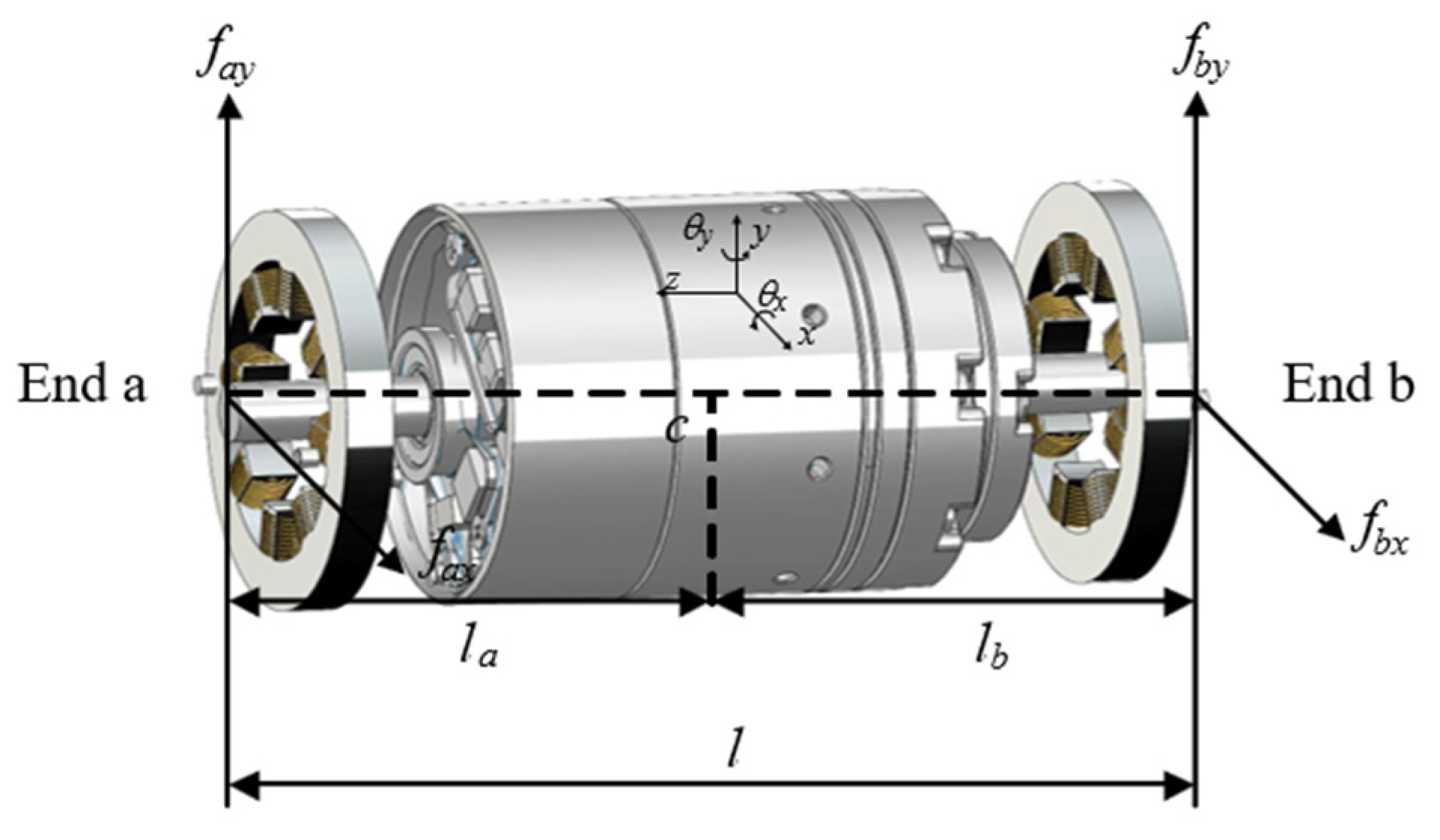
2. Dynamic Modeling of Rigid Rotor System of Electromagnetic Bearing-High Speed Motor
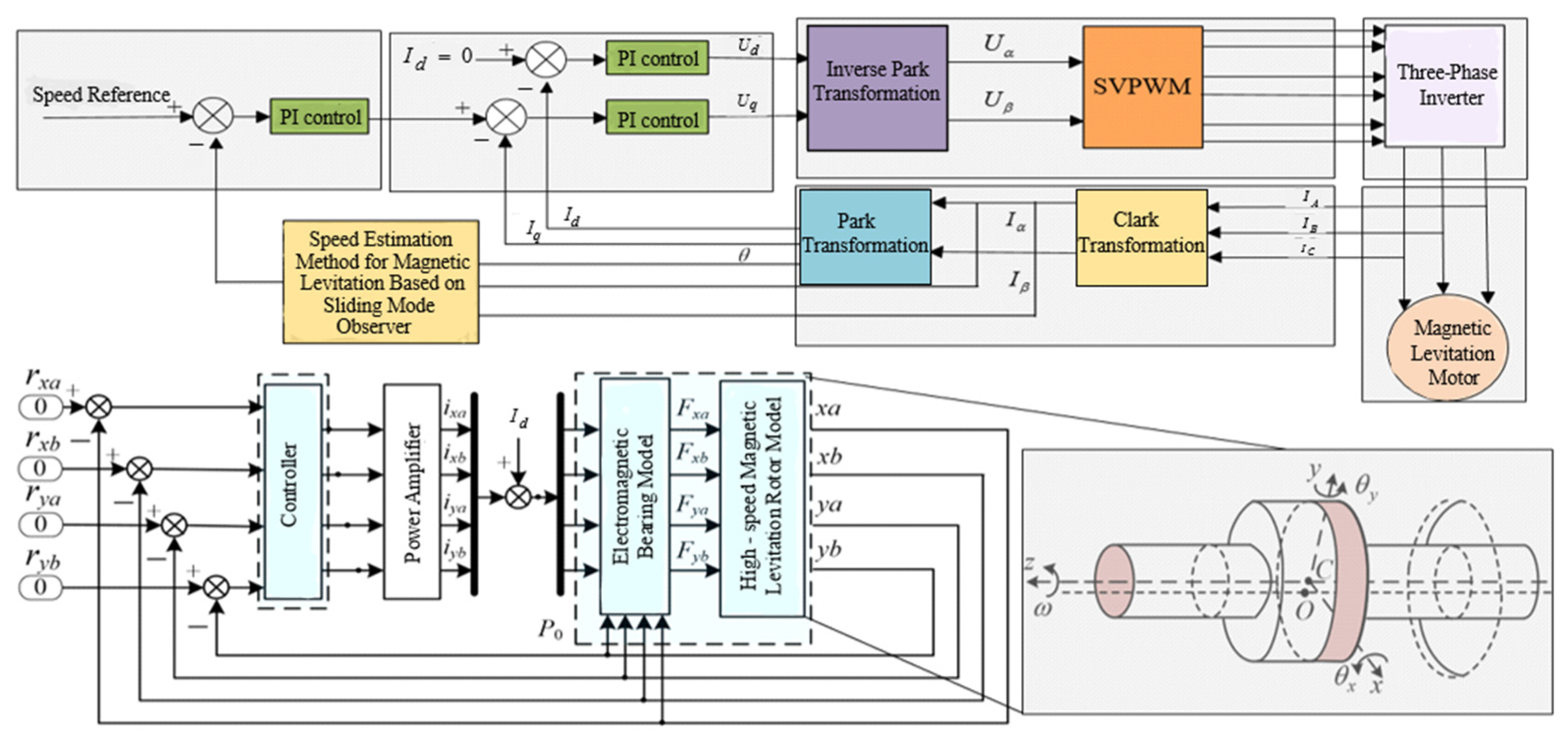
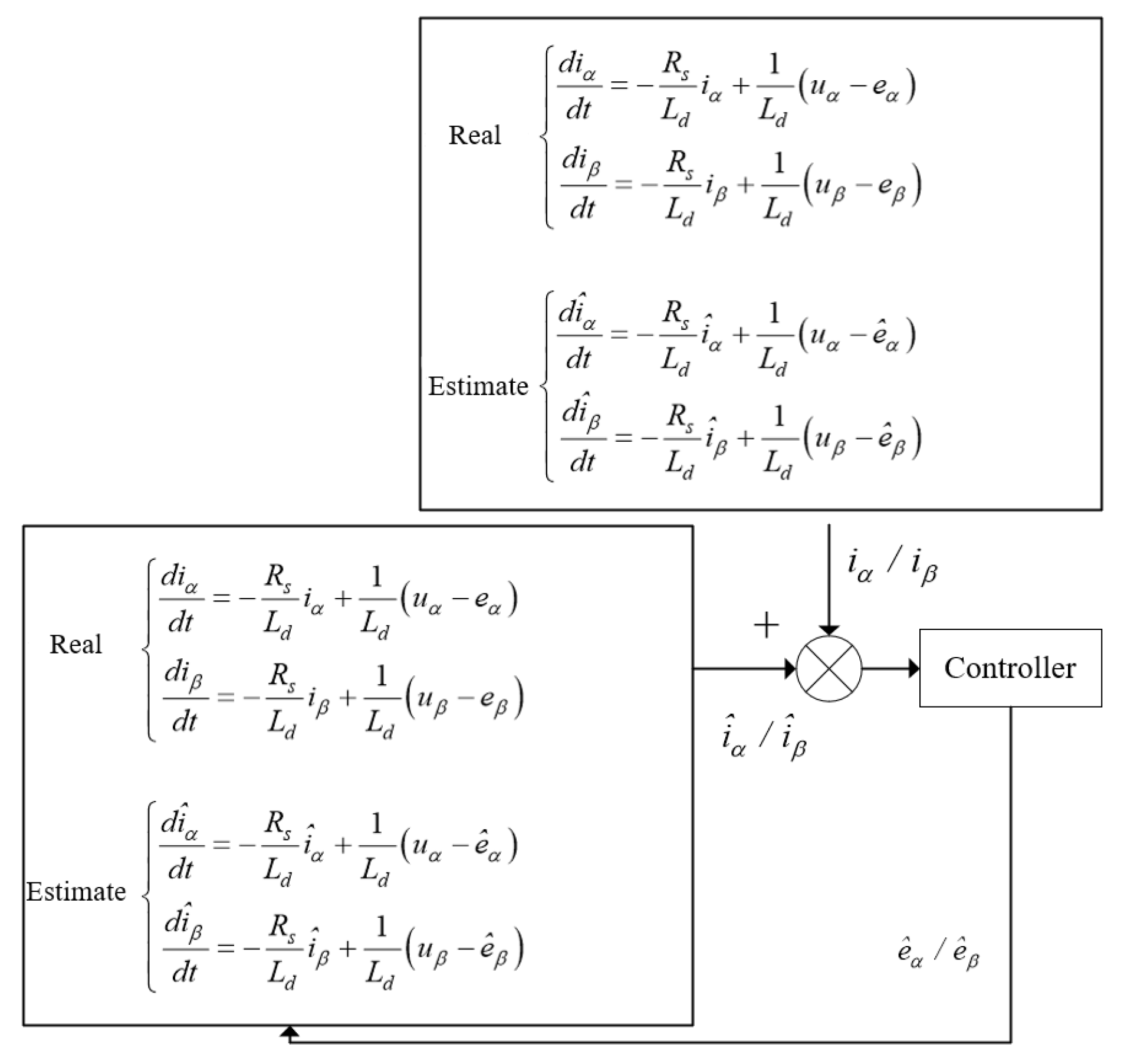
3. Speed Estimation of Maglev Motor Based on Sliding Mode Observer
3.1. Sliding Surface Design
3.2. Rotor Position and Speed Estimation
3.3. Stability Analysis
4. Emulation Analysis
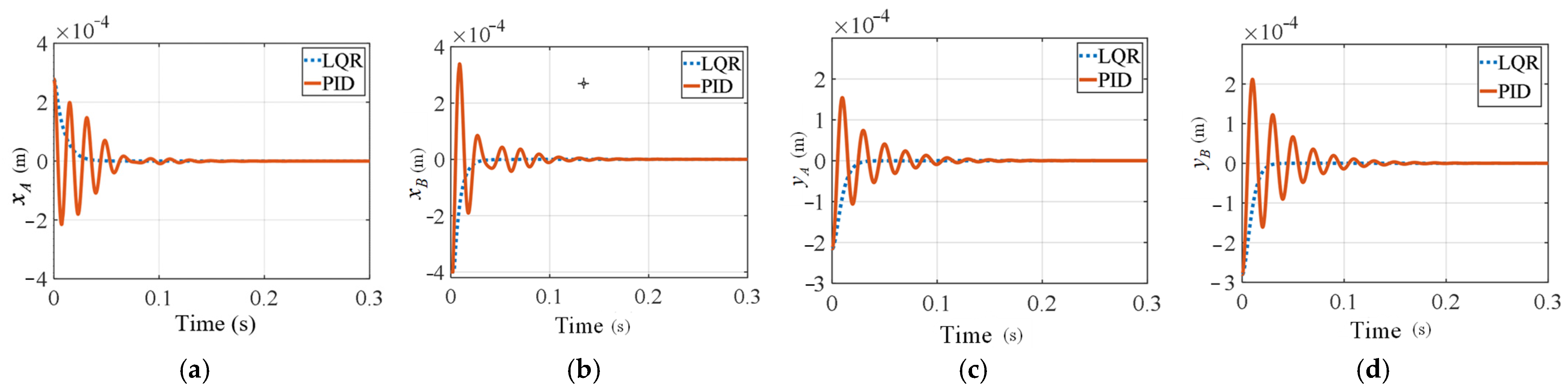
4.1. Verification of Motor Floating Operation
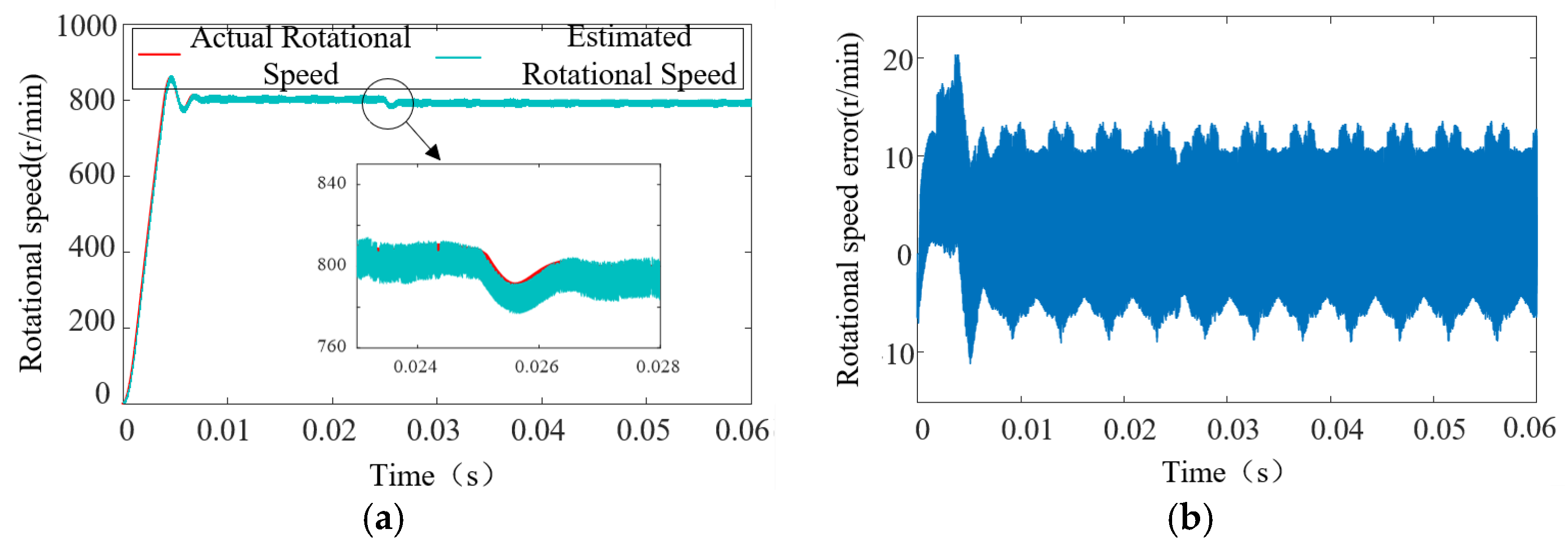
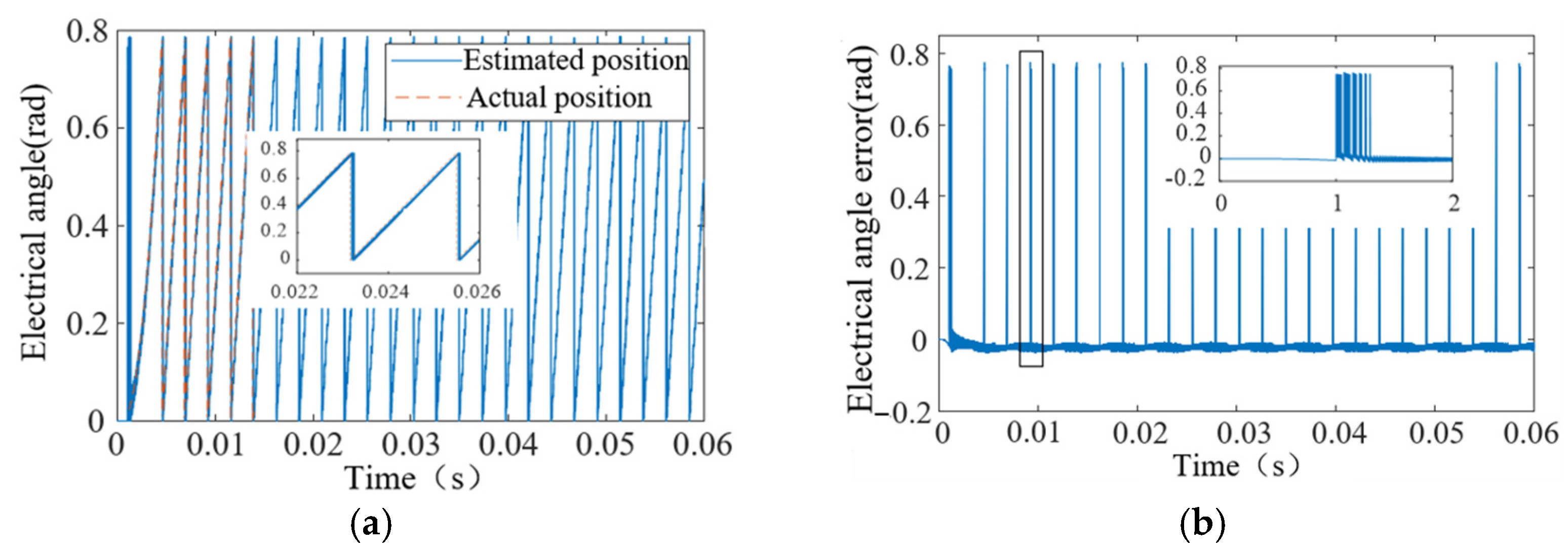
4.2. Verification of Speed Estimation Based on Sliding Mode Observer
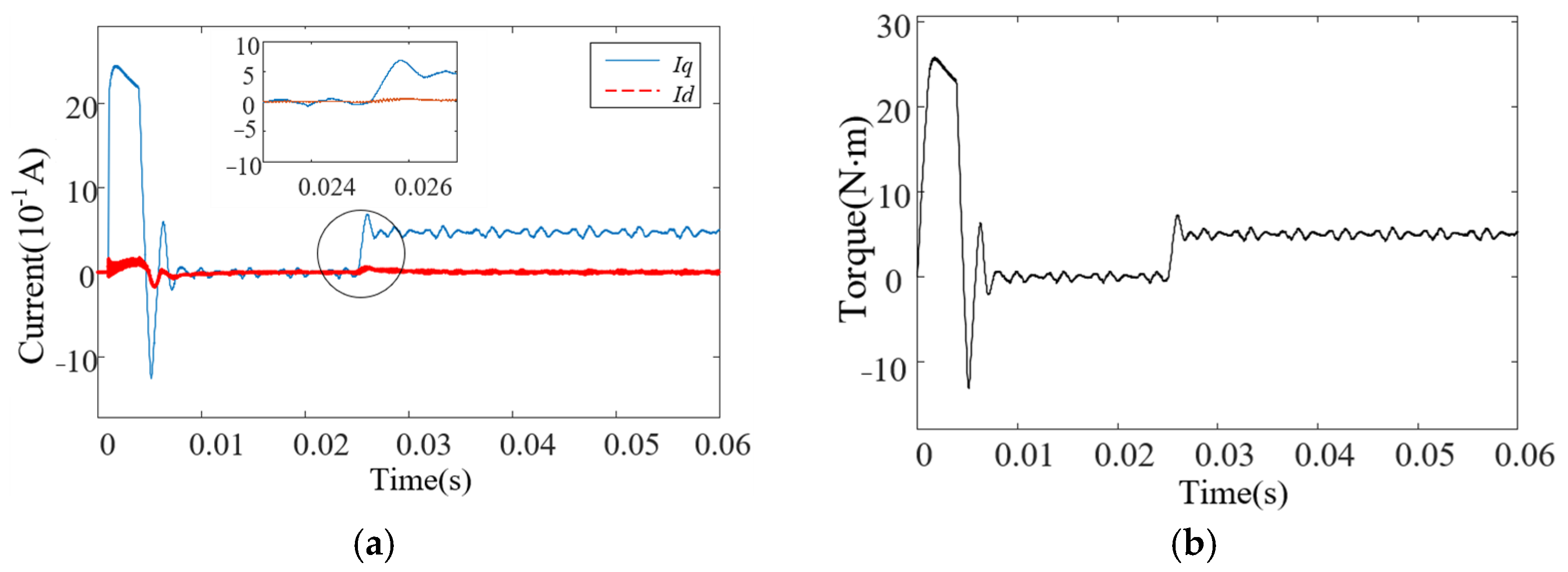
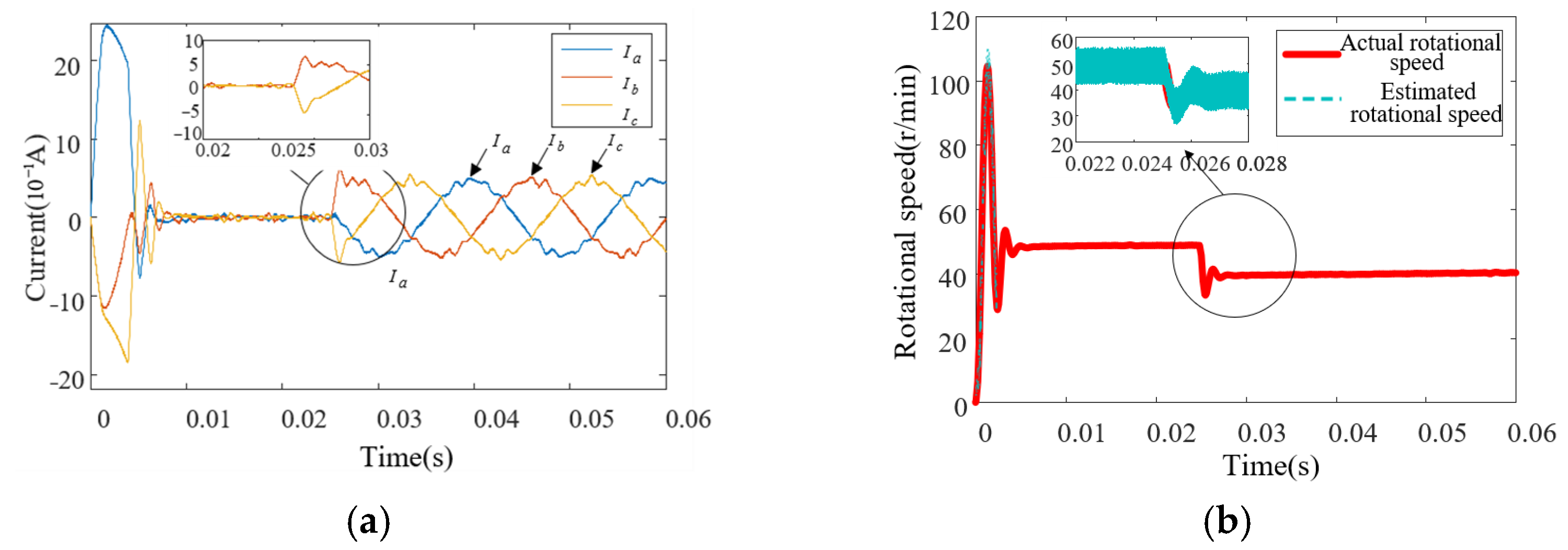
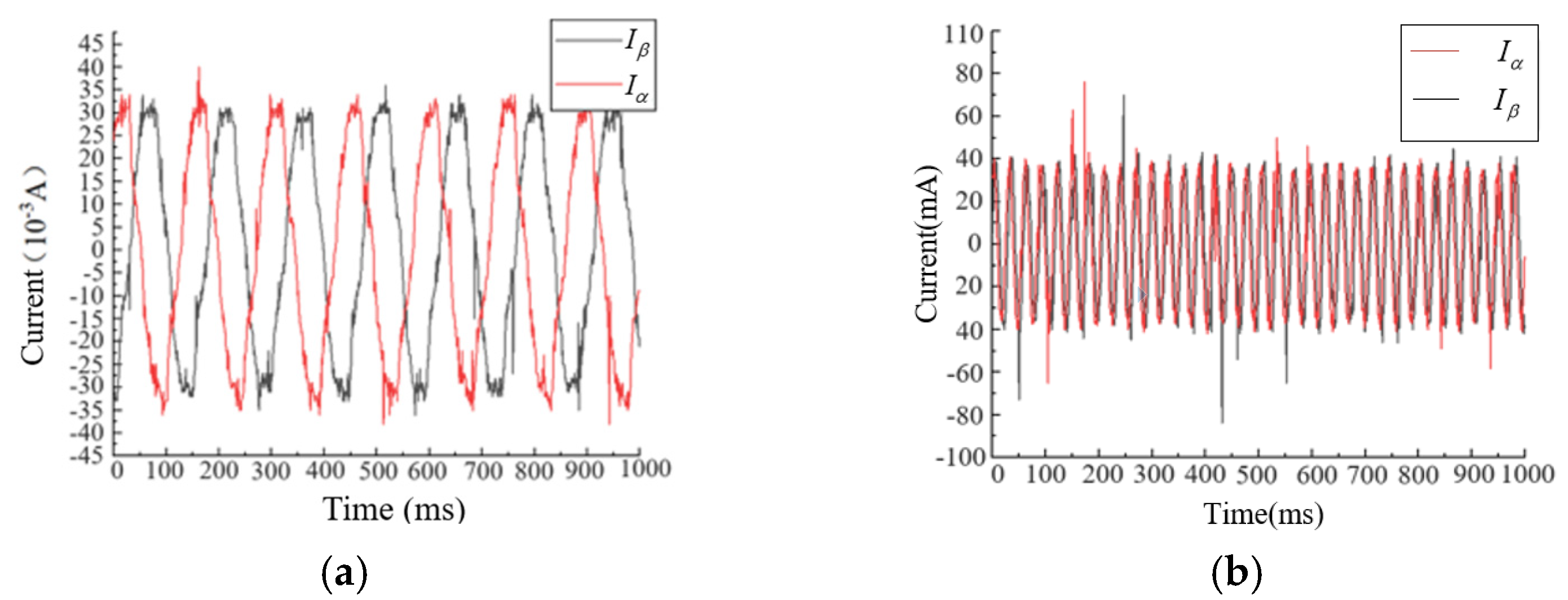
4.3. Verification of Motor Current and Torque
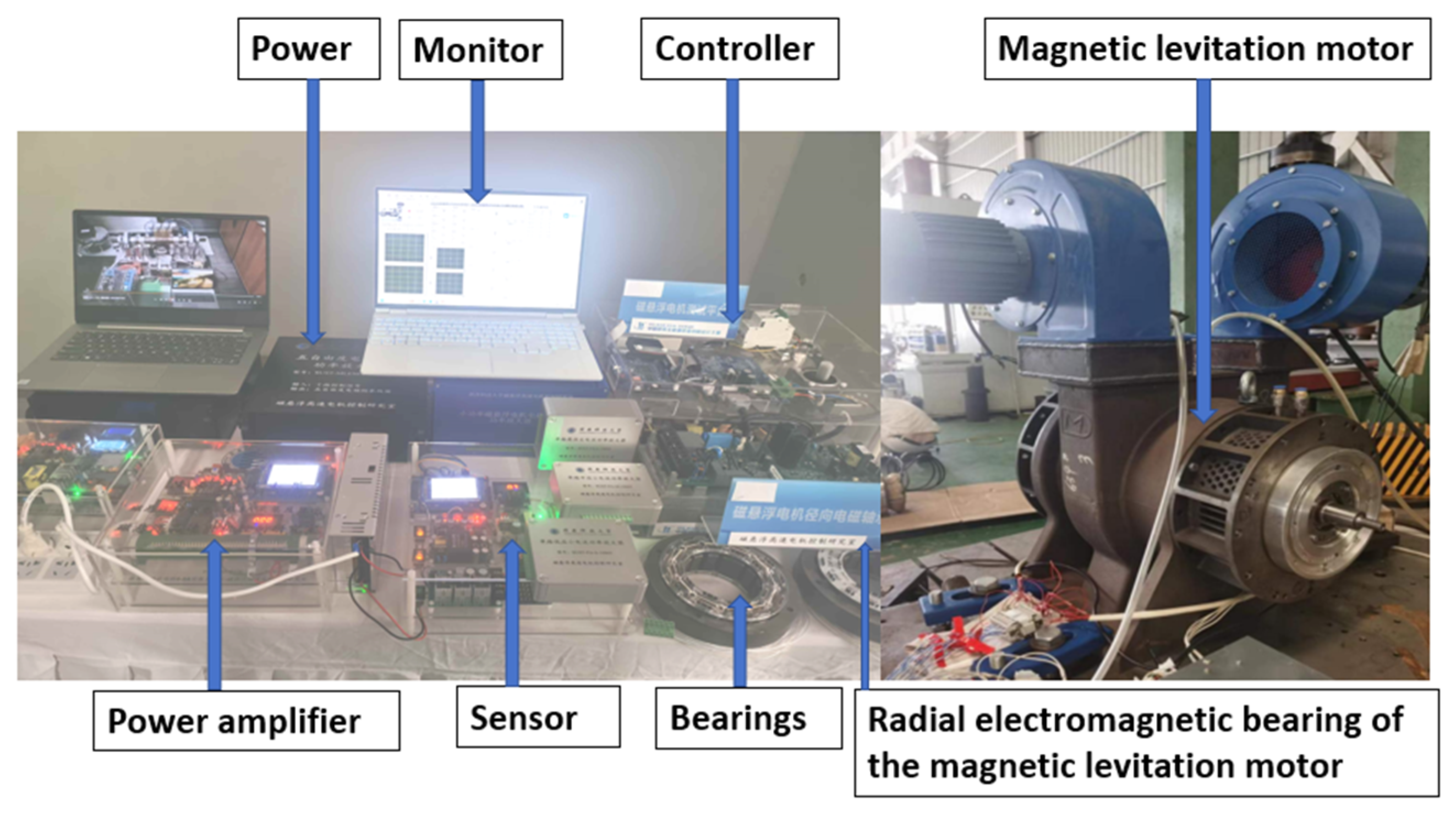
5. Experimental Verification
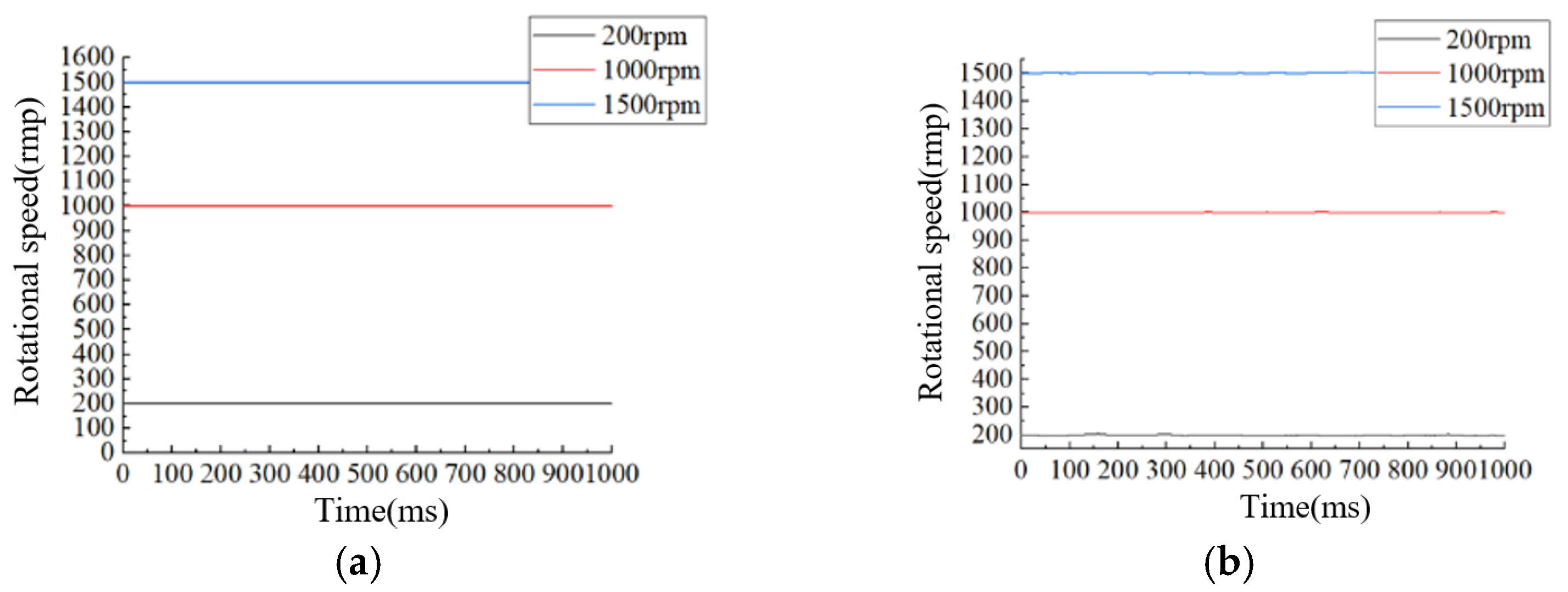
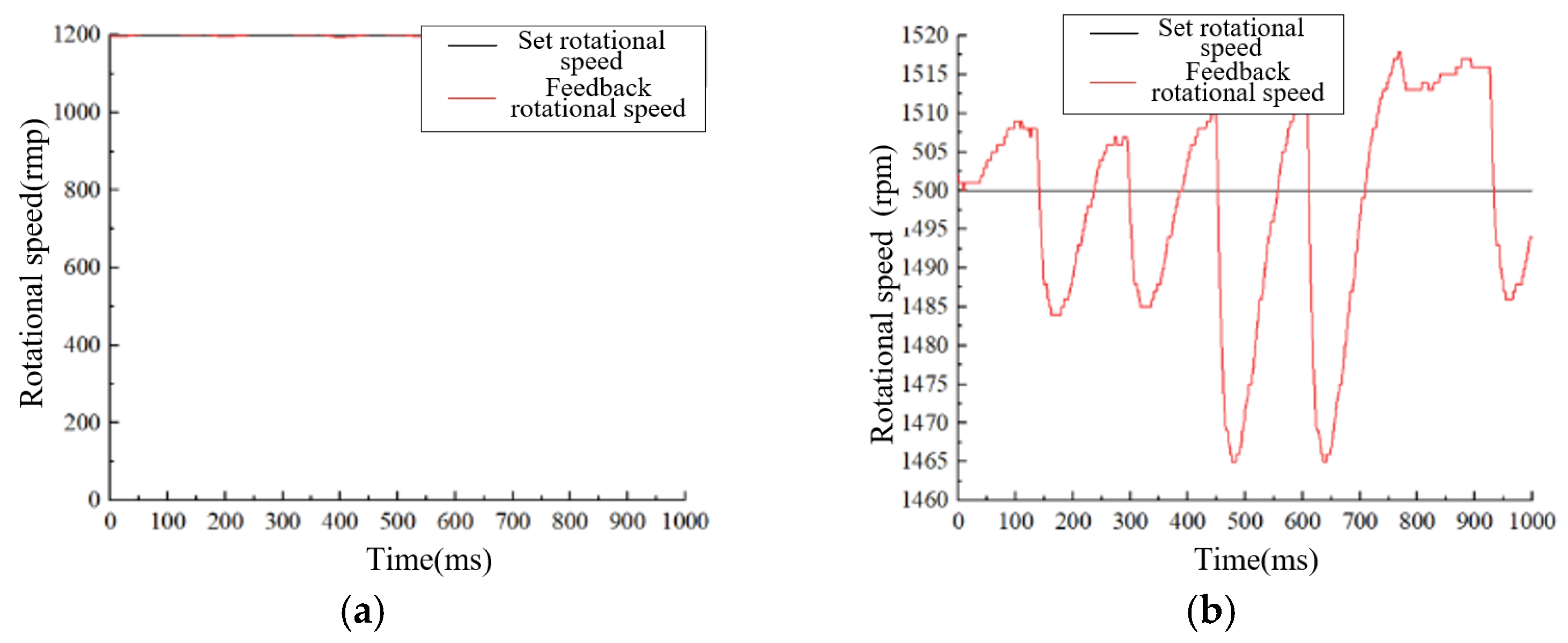
5.1. Observation of Motor Speed Under No-Load
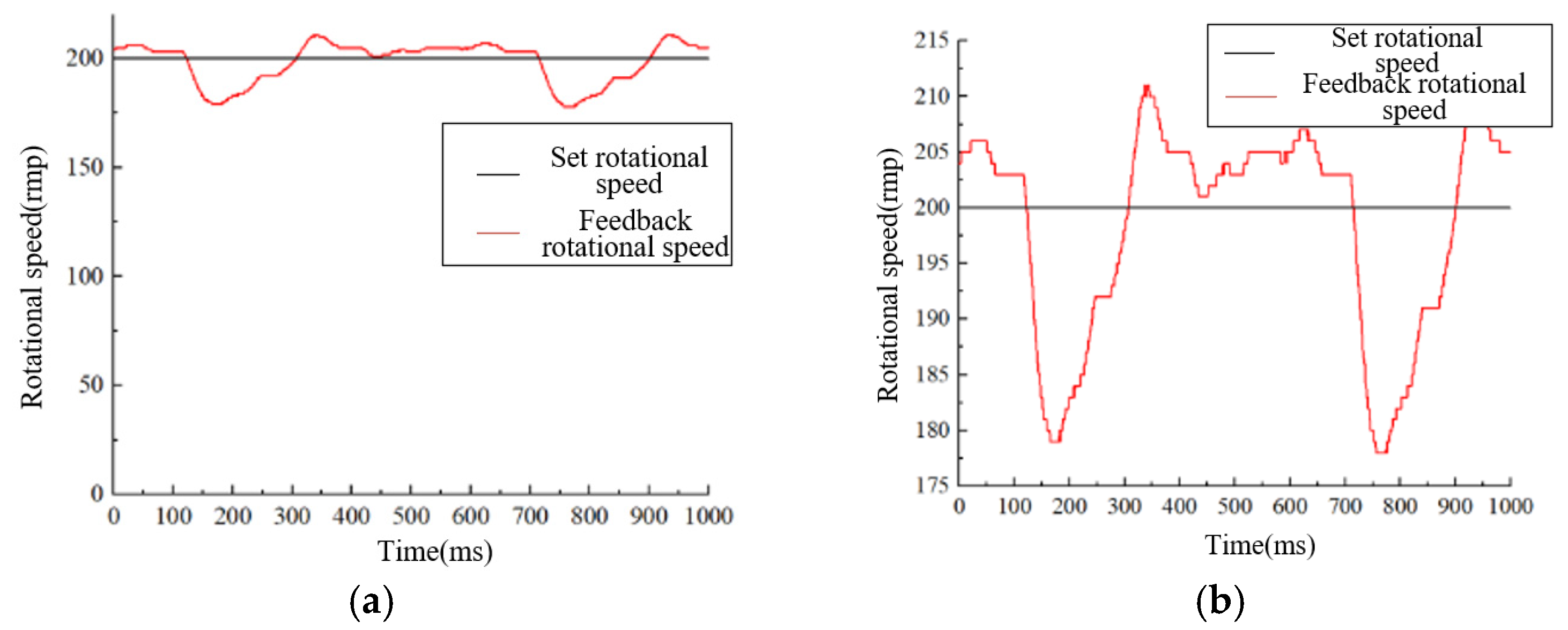
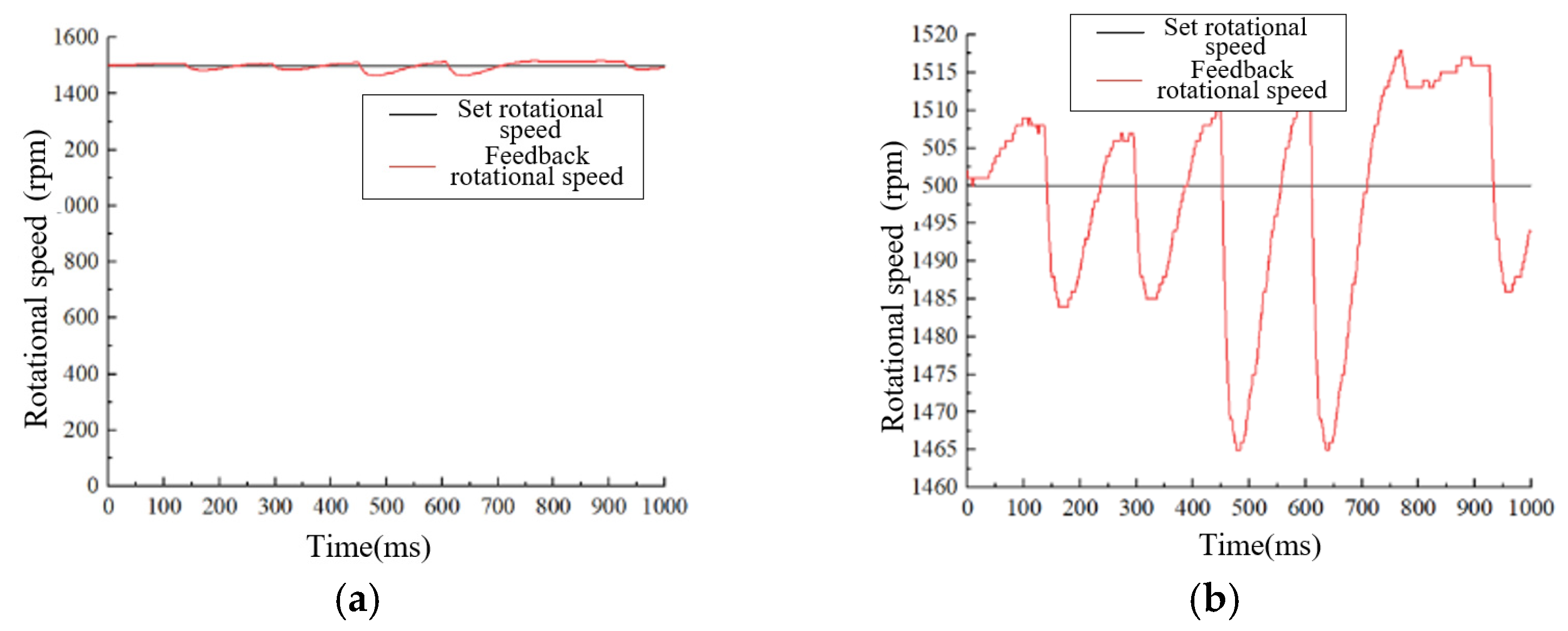
5.2. Observation of Motor Speed During Loading
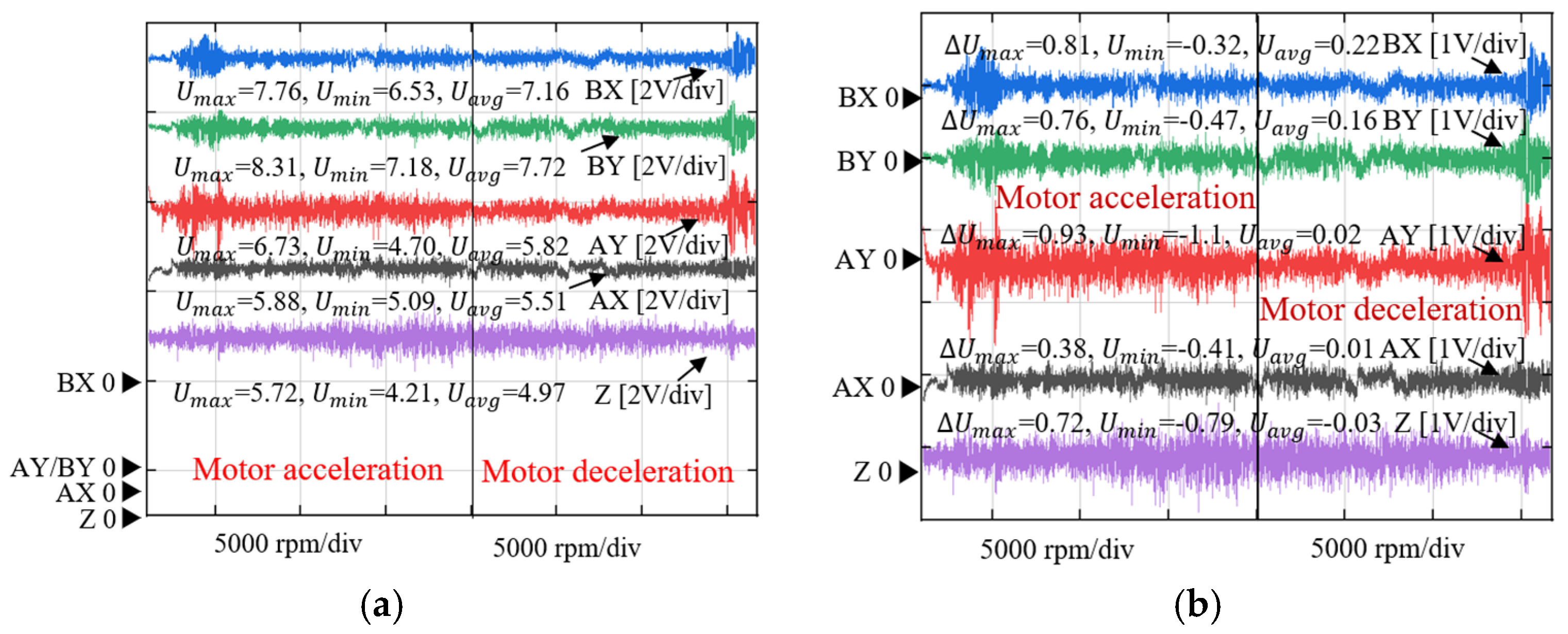
5.3. Acceleration and Deceleration Experiments
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MLM | Magnetic levitation motor |
| AMBs | Active magnetic bearings |
| SMO | Sliding mode observer |
References
- Jiang, H.; Su, Z.; Wang, D. Analytical Calculation of Active Magnetic Bearing Based on Distributed Magnetic Circuit Method. IEEE Trans. Energy Convers. 2020, 36, 1841–1851. [Google Scholar] [CrossRef]
- Gong, L.; Yang, Z.; Zhu, C.; Li, P. Automatic Balancing of Rigid Rotor for Magnetic Levitation High-Speed Motor Based on Polarity Switching Adaptive Trap. J. Electrotechnol. 2020, 35, 1410–1421. [Google Scholar]
- Zhang, D.; Jiang, J.; Wang, B. Multisource Oscillation Suppression Control of Magnetic Levitation High-Speed Permanent Magnet Motor. IEEE Access 2022, 10, 106506–106512. [Google Scholar] [CrossRef]
- Ozturk, U.K.; Abdioglu, M.; Ozkat, E.C.; Mollahasanoglu, H. Extended 2-D Magnetic Field Modeling of Linear Motor to Investigate the Magnetic Force Parameters of High-Speed Superconducting Maglev. IEEE Trans. Appl. Supercond. 2023, 33, 1–8. [Google Scholar] [CrossRef]
- Liao, Z.; Yue, J.; Lin, G. Application Research of HTS Linear Motor Based on Halbach Array in High-Speed Maglev System. IEEE Trans. Appl. Supercond. 2021, 31, 1–7. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awwad, E.M.; El-Meligy, M.A.; Nasr, E.S.A. Radial versus Cartesian Control Strategies to Stabilize the Nonlinear Whirling Motion of the Six-Pole Rotor-AMBs. IEEE Access 2020, 8, 138859–138883. [Google Scholar] [CrossRef]
- Wu, H.; Yu, M.; Song, C.; Wang, N. Unbalance Vibration Suppression of Maglev High-Speed Motor Based on the Least-Mean-Square. Actuators 2022, 11, 348. [Google Scholar] [CrossRef]
- Li, J.; Ma, X. Vibration Mechanism and Compensation Strategy of Magnetic Suspension Rotor System Under Unbalanced Magnetic Pull. IEEE Access 2022, 10, 31235–31243. [Google Scholar]
- Le, Y.; Wang, D.; Zheng, S. Design and Optimization of a Radial Magnetic Bearing Considering Unbalanced Magnetic Pull Effects for Magnetically Suspended Compressor. IEEE/ASME Trans. Mechatron. 2022, 27, 5760–5770. [Google Scholar] [CrossRef]
- Gong, L.; Zhu, C. Coincident Vibration Suppression of Rigid Rotor of Magnetic Levitation High-Speed Motor Based on Four-Factor Variable Polarity Control. Chin. J. Electr. Eng. 2021, 41, 1515–1524. [Google Scholar]
- Yao, C.; Zhou, Y. Active Disturbance Rejection and Ripple Suppression Control Strategy with Model Compensation of Single-Winding Bearingless Flux-Switching Permanent Magnet Motor. IEEE Trans. Ind. Electron. 2022, 69, 7708–7719. [Google Scholar]
- Li, Y.; Hu, Y.; Zhu, Z.Q. Current Harmonics and Unbalance Suppression of Dual Three-Phase PMSM Based on Adaptive Linear Neuron Controller. IEEE Trans. Energy Convers. 2023, 38, 2353–2363. [Google Scholar] [CrossRef]
- Zhou, T.; Zhu, C. Design of Robust Output Feedback Controllers for Rigid Rotor Systems of High-Speed Motors with Electromagnetic Bearings Based on Feature Structure Configurations. Chin. J. Electr. Eng. 2022, 42, 3775–3786. [Google Scholar]
- Cao, Z.; Huang, Y.; Peng, F.; Dong, J. Driver Circuit Design for a New Eddy Current Sensor in Displacement Measurement of Active Magnetic Bearing Systems. IEEE Sens. J. 2022, 22, 16945–16951. [Google Scholar] [CrossRef]
- Hutterer, M.; Schroedl, M. Stabilization of Active Magnetic Bearing Systems in the Case of Defective Sensors. IEEE/ASME Trans. Mechatron. 2021, 27, 3672–3682. [Google Scholar] [CrossRef]
- Yu, K.; Wang, Z. Position Sensorless Control of IPMSM Using Adjustable Frequency Setting Square-Wave Voltage Injection. IEEE Trans. Power Electron. 2022, 37, 12973–12979. [Google Scholar] [CrossRef]
- Liu, Z.-H.; Nie, J.; Wei, H.-L.; Chen, L.; Li, X.-H.; Lv, M.-Y. Switched PI Control Based on MARS for Sensorless Control of PMSM Drives Using Fuzzy-Logic-Controller. IEEE Open J. Power Electron. 2022, 3, 368–381. [Google Scholar] [CrossRef]
- Wang, Z.; Yu, K.; Li, Y.; Gu, M. Position Sensorless Control of Dual Three-Phase IPMSM Drives with High-Frequency Square-Wave Voltage Injection. IEEE Trans. Ind. Electron. 2022, 70, 9925–9934. [Google Scholar] [CrossRef]
- Zhang, Y.; Yin, Z.; Tang, R.; Liu, J. Moment of Inertia and Load Torque Identification Based on Adaptive Extended Kalman Filter for Interior Permanent Magnet Synchronous Motors. IEEE Trans. Instrum. Meas. 2025, 74, 1–12. [Google Scholar] [CrossRef]
- Zhang, L.; Li, S. Performance Analysis of High-Frequency Signal Injection Methods for Sensorless Control of PMSM in Low-Speed Range. Sensors 2021, 21, 1234. [Google Scholar]
- Gong, L.; He, P.; Yichen, W.; Zhaoyang, D.; Zhu, C. Vibration Control of Full Rotational Speed Range for Magnetically Levitated High-Speed Motors Based on Linear Quadratic Regulator. J. Vib. Eng. Technol. 2025, 13, 97. [Google Scholar] [CrossRef]
- Liang, J.; Wu, J.; Wang, Y.; Zhong, Z.; Bai, X. Sensorless Control for a Permanent Magnet Synchronous Motor Based on a Sliding Mode Observer. Eng 2024, 5, 1737–1751. [Google Scholar] [CrossRef]
- Liu, W.; Luo, B.; Yang, Y.; Niu, H.; Zhang, X.; Zhou, Y.; Zeng, C. An Adaptive-Gain Sliding Mode Observer with Precise Compensation for Sensorless Control of PMSM. Energies 2023, 16, 7968. [Google Scholar] [CrossRef]
- Park, S.; Ban, J.; Doh, S. Hybrid Reaching Law of Sliding Mode Position-Sensorless Speed Control for Switched Reluctance Motors. Electronics 2025, 14, 577. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, L.; Li, Y.; Luo, W.; Chen, J.; Hua, Z.; Dai, D. Speed Estimation Method of Active Magnetic Bearings Magnetic Levitation Motor Based on Adaptive Sliding Mode Observer. Energies 2025, 18, 1539. https://doi.org/10.3390/en18061539
Gong L, Li Y, Luo W, Chen J, Hua Z, Dai D. Speed Estimation Method of Active Magnetic Bearings Magnetic Levitation Motor Based on Adaptive Sliding Mode Observer. Energies. 2025; 18(6):1539. https://doi.org/10.3390/en18061539
Chicago/Turabian StyleGong, Lei, Yu Li, Wenjuan Luo, Jingwen Chen, Zhiguang Hua, and Dali Dai. 2025. "Speed Estimation Method of Active Magnetic Bearings Magnetic Levitation Motor Based on Adaptive Sliding Mode Observer" Energies 18, no. 6: 1539. https://doi.org/10.3390/en18061539
APA StyleGong, L., Li, Y., Luo, W., Chen, J., Hua, Z., & Dai, D. (2025). Speed Estimation Method of Active Magnetic Bearings Magnetic Levitation Motor Based on Adaptive Sliding Mode Observer. Energies, 18(6), 1539. https://doi.org/10.3390/en18061539