
Multi-Timescale Battery-Charging Optimization for Electric Heavy-Duty Truck Battery-Swapping Stations, Considering Source–Load–Storage Uncertainty

 ,
,
Abstract
1. Introduction
- (1)
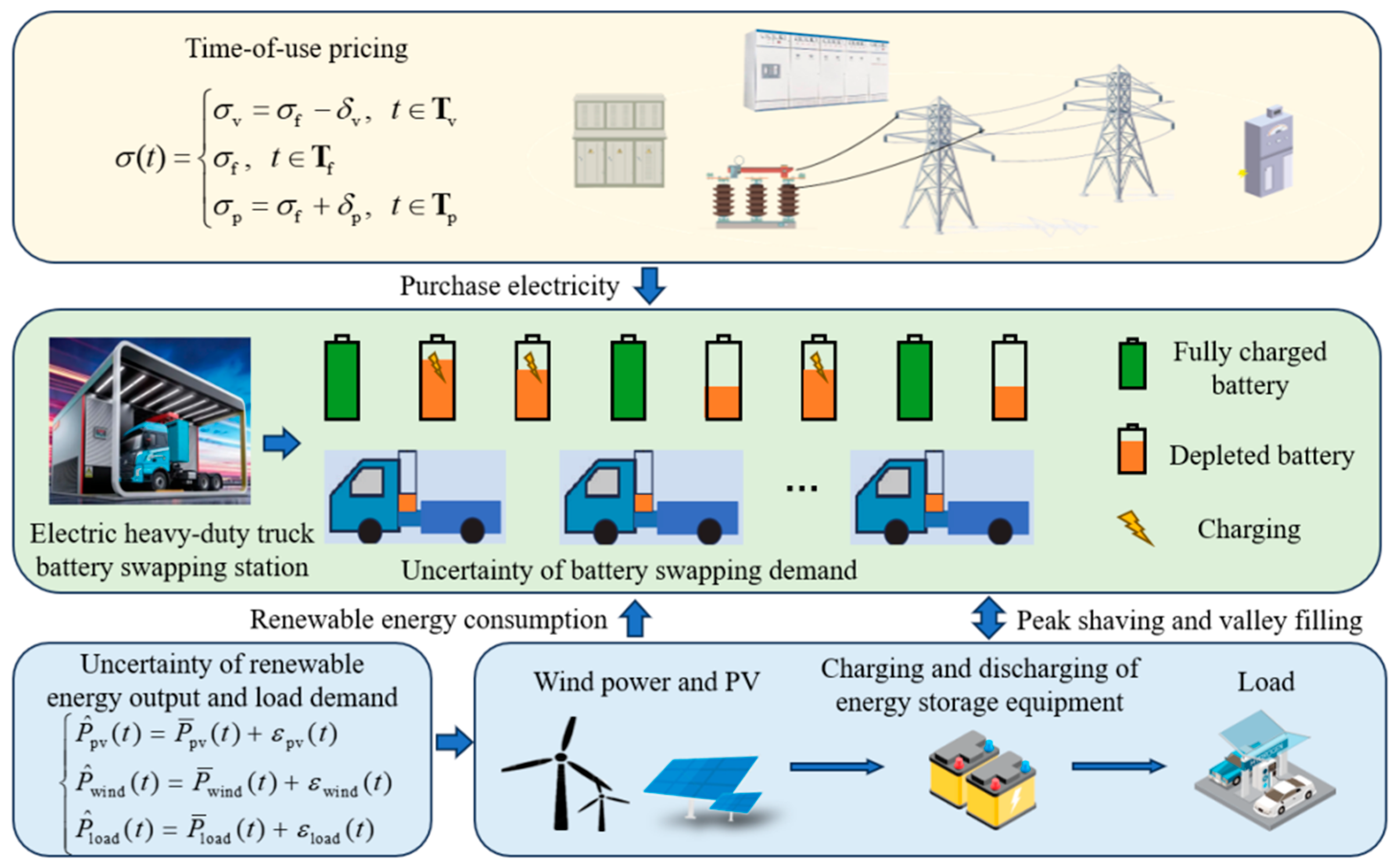
- A battery-charging model for electric heavy-duty truck battery-swapping stations is developed, accounting for the variability in the power output of energy sources, loads, and storage. Under the time-of-use pricing mechanism, the model comprehensively accounts for the uncertainties of renewable energy sources like PV and wind power, as well as the impact of grid-load fluctuations on battery-charging behaviors. It simulates the complexity of the battery-swapping station’s operation under real-world conditions, such as seasonal climate changes and variations in user electricity consumption behavior, enhancing the modeling accuracy.
- (2)
- A day-ahead battery-charging optimization algorithm for electric heavy-duty truck battery-swapping stations based on intra-day optimization feedback IGDT is proposed. The algorithm solves the day-ahead charging strategy optimization problem with the uncertainties in energy sources, loads, and storage, using both robust optimization and opportunistic optimization models. The former treats uncertainty as a negative factor and provides risk-averse strategies, while the latter views uncertainty as a favorable condition, optimizing decisions to pursue higher returns. This allows decision-makers to create different day-ahead scheduling strategies based on varying risk preferences. Additionally, the algorithm adjusts the day-ahead robust and opportunistic factors dynamically based on feedback from intra-day optimization results, allowing the day-ahead optimization risk attitude to be fine-tuned in response to real-time conditions.
- (3)
- An intra-day battery-charging optimization algorithm based on an improved grasshopper optimization algorithm is proposed. The algorithm uses chaotic sequences for population initialization, ensuring a more even spread of the population across the search space, thus improving the population quality, accelerating the iteration speed, and enhancing stability. Moreover, an elite opposition-based learning strategy is employed to select elite grasshoppers and to assign appropriate influence weights to the individuals, enabling them to collaboratively identify an elite leader. This leader guides the population’s position updates, helping avoid local optima when solving high-dimensional optimization problems.
2. Electric Heavy-Duty Truck Battery-Swapping Station Model, Considering Source–Load–Storage Uncertainty
2.1. Uncertainty Model of Renewable Energy Output and Load Demand
2.1.1. Energy-Storage Model
2.1.2. Interaction Model Between Electric Heavy-Duty Truck Battery-Swapping Stations and Power Grids
2.1.3. Battery-Charging Model
2.1.4. Uncertainty Model of Battery-Swapping Demand
2.1.5. Constraints
- (1)
- Electricity Purchase Constraints
- (2)
- Charging Power Constraints
- (3)
- Battery-swapping Demand Constraints
- (4)
- Energy-storage Charging and Discharging Constraints
- (5)
- Power Balance Constraints
2.1.6. Problem Formulation of Multi-Timescale Battery-Charging Optimization
- (1)
- Day-Ahead Optimization Objective Function
- (2)
- Intra-Day Optimization Objective Function
2.2. Multi-Timescale Battery-Charging Optimization Model for Electric Heavy-Duty Truck Battery-Swapping Stations
2.2.1. Day-Ahead Battery-Charging Optimization Algorithm for Electric Heavy-Duty Truck Battery-Swapping Stations Based on Intra-Day Optimization Feedback IGDT
2.2.2. Intra-Day Battery-Charging Optimization Algorithm for Electric Heavy-Duty Truck Battery-Swapping Stations Based on an Improved Grasshopper Algorithm
- (1)
- Initialization
- (2)
- Calculate Fitness Values, Nonlinear Convergence Parameters, and Lévy Flight Lengths
- (3)
- Elite Opposition-Based Learning Decision-Making Mechanism
- (4)
- Updating the Population Position
- (5)
- For each grasshopper individual, determine whether the constraints of the optimization problem are satisfied. If satisfied, go to step (6); if not, regenerate a grasshopper individual in the search interval instead.
- (6)
- Determine whether to meet the iteration termination conditions, i.e., to reach the preset maximum number of iterations. If the iteration termination conditions are met, the algorithm outputs the position information of the current optimal individual and its fitness value and then terminates. Otherwise, it proceeds to step (2) to continue the iteration.
- (7)
- Evaluate the intra-day real-time optimization results.
3. Numerical Experiment Analysis
3.1. Numerical Experiment Setup
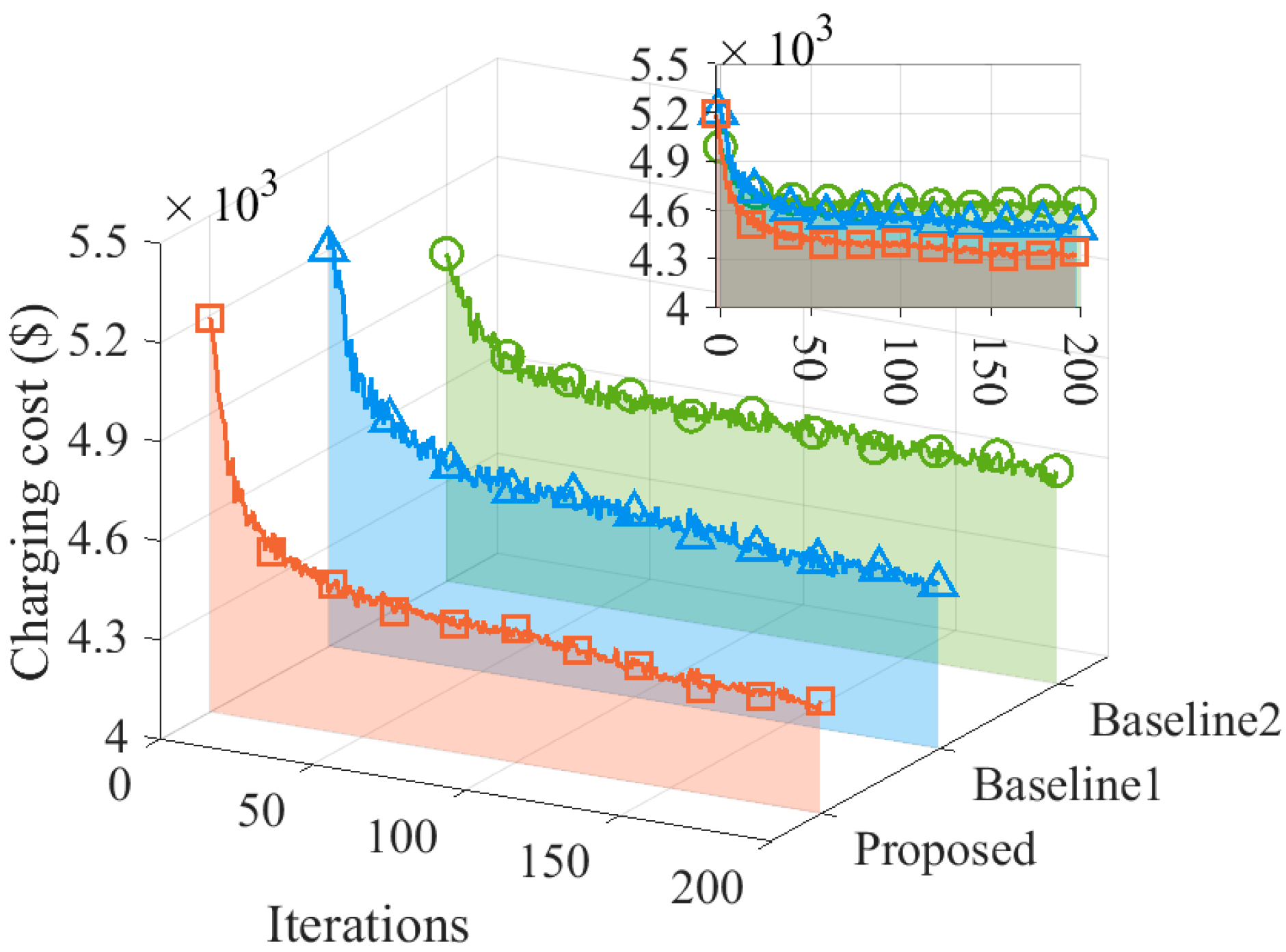
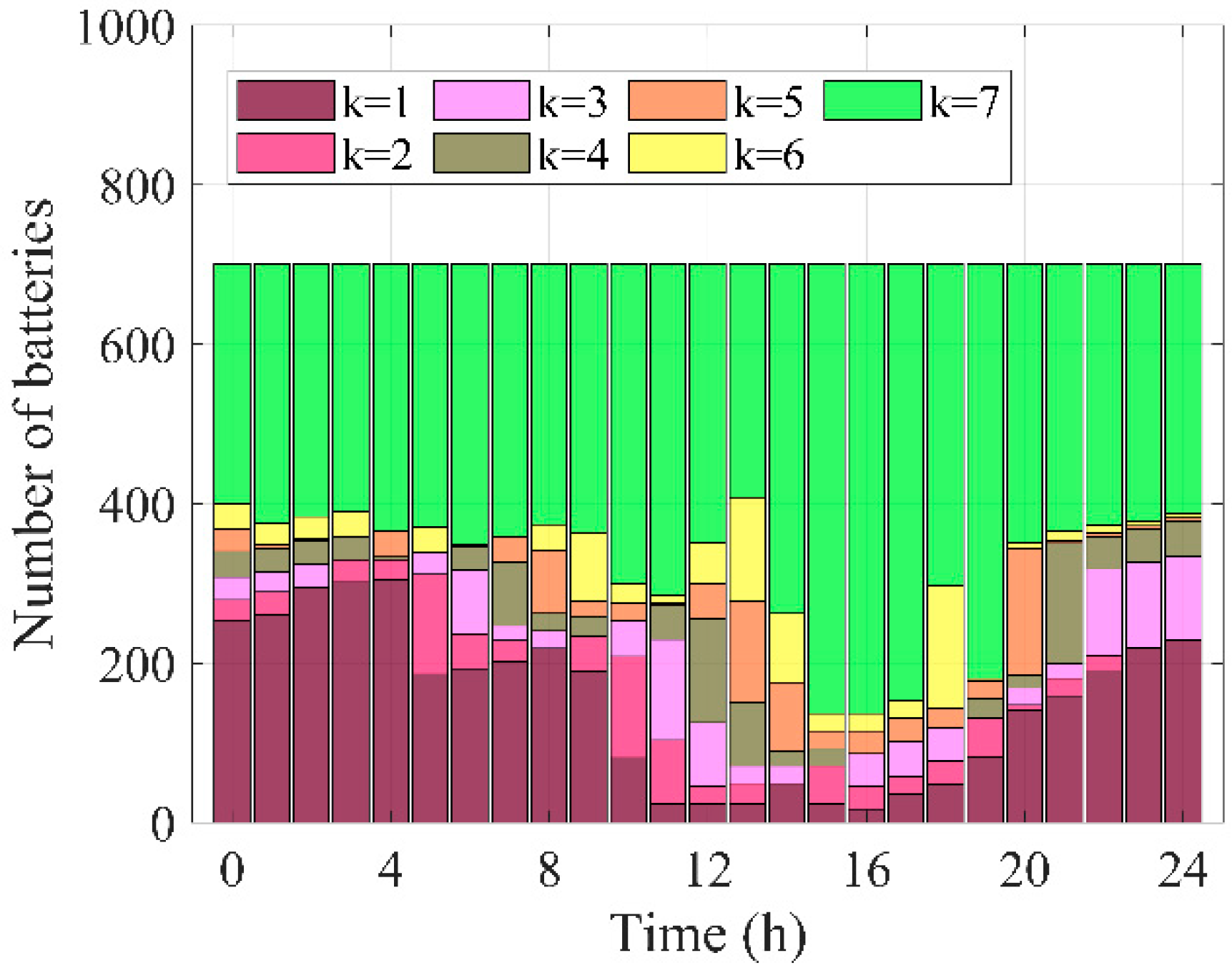
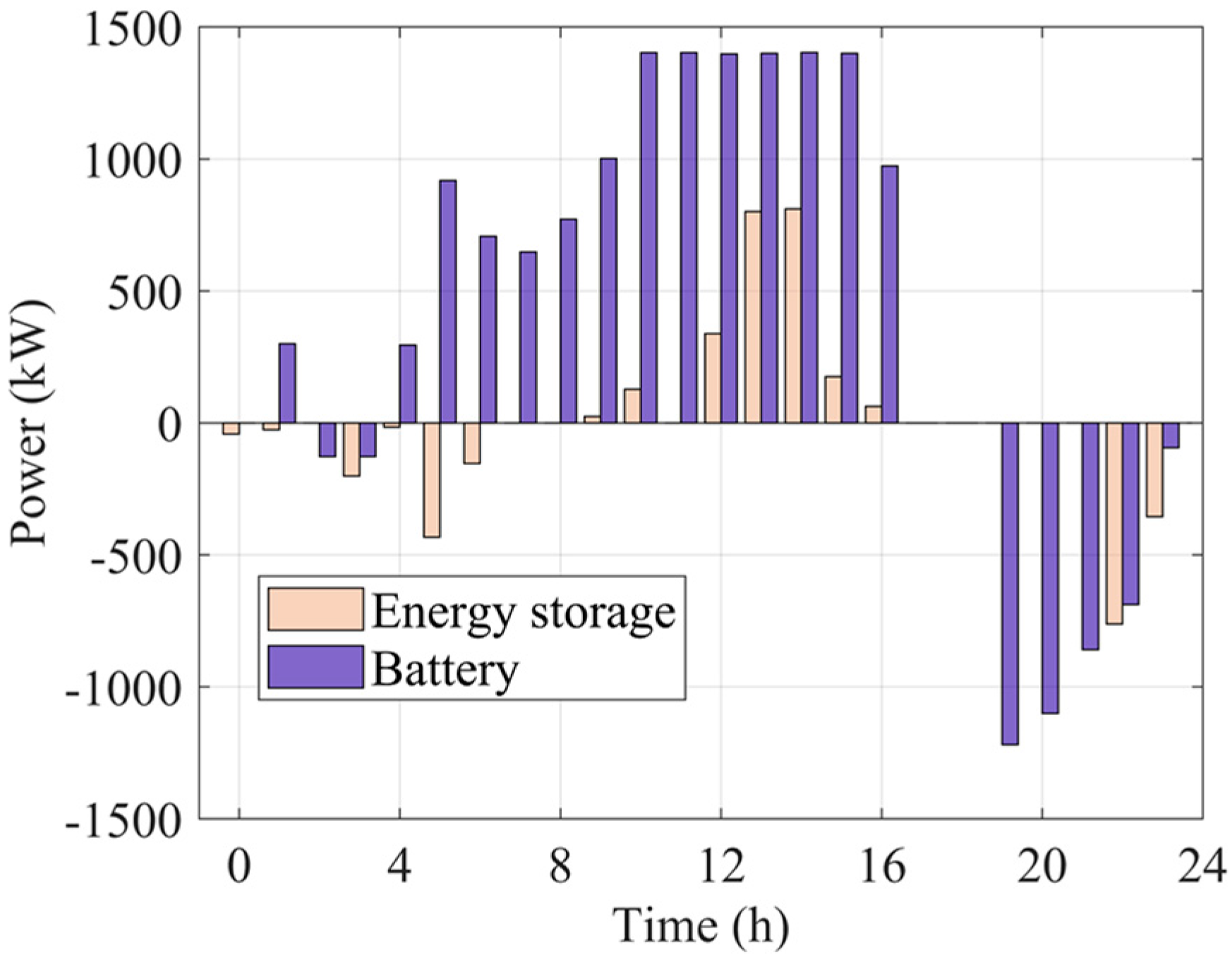
3.2. Analysis of Simulation Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ghandriz, T.; Jacobson, B.; Murgovski, N.; Nilsson, P.; Laine, L. Real-Time Predictive Energy Management of Hybrid Electric Heavy Vehicles by Sequential Programming. IEEE Trans. Veh. Technol. 2021, 70, 4113–4128. [Google Scholar] [CrossRef]
- Li, Z.; Xu, Y.; Wang, P.; Xiao, G. Coordinated preparation and recovery of a post-disaster multi-energy distribution system considering thermal inertia and diverse uncertainties. Appl. Energ. 2023, 336, 120736. [Google Scholar] [CrossRef]
- Tarar, M.O.; Hassan, N.U.; Naqvi, I.H.; Pecht, M. Techno-Economic Framework for Electric Vehicle Battery Swapping Stations. IEEE Trans. Transp. Electrif. 2023, 9, 4458–4473. [Google Scholar] [CrossRef]
- Wang, R.; Ju, Y.; Allybokus, Z.; Zeng, W.; Obrecht, N.; Moura, S. Optimal Sizing, Operation, and Efficiency Evaluation of Battery Swapping Stations for Electric Heavy-Duty Trucks. In Proceedings of the 2024 American Control Conference (ACC), Toronto, ON, Canada, 10–12 July 2024. [Google Scholar]
- Li, Z.; Wu, L.; Xu, Y.; Moazeni, S.; Tang, Z. Multi-Stage Real-Time Operation of a Multi-Energy Microgrid With Electrical and Thermal Energy Storage Assets: A Data-Driven MPC-ADP Approach. IEEE Trans. Smart Grid. 2022, 13, 213–226. [Google Scholar] [CrossRef]
- Wu, H.; Pang, G.K.H.; Choy, K.L.; Lam, H.Y. An Optimization Model for Electric Vehicle Battery Charging at a Battery Swapping Station. IEEE Trans. Veh. Technol. 2018, 67, 881–895. [Google Scholar] [CrossRef]
- Ko, H.; Pack, S. An Optimal Battery Charging Algorithm in Electric Vehicle-Assisted Battery Swapping Environments. IEEE Trans. Intell. Transp. Syst. 2022, 23, 3985–3994. [Google Scholar] [CrossRef]
- Esmaeili, S.; Anvari-Moghaddam, A. Optimal Operation Scheduling of a Microgrid Incorporating Battery Swapping Stations. IEEE Trans. Power Syst. 2019, 34, 5063–5072. [Google Scholar] [CrossRef]
- Jin, J.; Mao, S. Optimal Priority Rule-Enhanced Deep Reinforcement Learning for Charging Scheduling in an Electric Vehicle Battery Swapping Station. IEEE Trans. Smart Grid. 2023, 14, 4581–4593. [Google Scholar] [CrossRef]
- Davari, M.; Nafisi, H.; Nasr, M.-A.; Blaabjerg, F. A Novel IGDT-Based Method to Find the Most Susceptible Points of Cyberattack Impacting Operating Costs of VSC-Based Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3695–3714. [Google Scholar] [CrossRef]
- Gazijahani, F.; Salehi, J. IGDT-Based Complementarity Approach for Dealing With Strategic Decision Making of Price-Maker VPP Considering Demand Flexibility. IEEE Trans. Ind. Inf. 2020, 16, 2212–2220. [Google Scholar] [CrossRef]
- Jamian, J.J.; Mustafa, M.W.; Mokhlis, H.; Baharudin, M.A. Simulation Study on Optimal Placement and Sizing of Battery Switching Station Units Using Artificial Bee Colony Algorithm. Int. J. Electr. Power Energy Syst. 2014, 55, 592–601. [Google Scholar] [CrossRef]
- Fang, S.-C.; Ke, B.-R.; Chung, C.-Y. Minimization of Construction Costs for an All Battery-Swapping Electric-Bus Transportation System: Comparison with an All Plug-In System. Energies 2017, 10, 890. [Google Scholar] [CrossRef]
- Singh, S.; More, V.; Batheri, R. Driving Electric Vehicles Into the Future With Battery Management Systems. IEEE Eng. Manag. Rev. 2022, 50, 157–161. [Google Scholar] [CrossRef]
- González-Romera, E.; Roncero-Clemente, C.; Barrero-González, F.; Milanés-Montero, M.I.; Romero-Cadaval, E. A Comprehensive Control Strategy for Multibus Nanogrids With Power Exchange Between Prosumers. IEEE Access 2021, 9, 104281–104293. [Google Scholar] [CrossRef]
- Zhang, H.; Zhai, X.; Zhang, J.; Bai, X.; Li, Z. Mechanism Analysis of the Effect of the Equivalent Proportional Coefficient of Inertia Control for a Doubly Fed Wind Generator on Frequency Stability in Extreme Environments. Sustainability 2024, 16, 4965. [Google Scholar] [CrossRef]
- Ahmed, H.M.A.; Sindi, H.F.; Azzouz, M.A.; Awad, A.S.A. Optimal Sizing and Scheduling of Mobile Energy Storage Toward High Penetration Levels of Renewable Energy and Fast Charging Stations. IEEE Trans. Energy Convers. 2022, 37, 1075–1086. [Google Scholar] [CrossRef]
- Wu, C.; Zhou, D.; Ma, Y.; Sui, Q.; Lin, X.; Wei, F. Restoration Enhancement for Distribution Systems Based on Multiple Battery Swapping Stations. IEEE Trans. Ind. Appl. 2024, 60, 2025–2036. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Z.; Xue, Y.; Chang, X.; Su, J.; Wang, P. A Stochastic Bi-Level Optimal Allocation Approach of Intelligent Buildings Considering Energy Storage Sharing Services. IEEE Trans. Consum. Electron. 2024, 70, 5142–5153. [Google Scholar] [CrossRef]
- Nojavan, S.; Zare, K.; Feyzi, M.R. Optimal Bidding Strategy of Generation Station in Power Market Using Information Gap Decision Theory (IGDT). Electr. Power Syst. Res. 2013, 96, 56–63. [Google Scholar] [CrossRef]
- Ghaleb, S. Feature Selection by Multiobjective Optimization: Application to Spam Detection System by Neural Networks and Grasshopper Optimization Algorithm. IEEE Access 2022, 10, 98475–98489. [Google Scholar] [CrossRef]
- Zhao, X.; Yang, Y.; Xu, Q. Day-ahead Robust Optimal Dispatch of Integrated Energy Station Considering Battery Exchange Service. J. Energy Storage 2022, 50, 104228. [Google Scholar] [CrossRef]
- Yang, J.; Wang, W.; Ma, K.; Yang, B. Optimal Dispatching Strategy for Shared Battery Station of Electric Vehicle by Divisional Battery Control. IEEE Access 2019, 1, 1. [Google Scholar] [CrossRef]
- Zhang, W. Multi-Objective Optimization of Charging Dispatching for Electric Vehicle Battery Swapping Station. Master’s thesis, Jilin University, Changchun, China, 2020. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value | Parameter Name | Parameter Value | Parameter Name | Parameter Value |
|---|---|---|---|---|---|
| 24, 144 | 1 h, 10 min | 700 | |||
| 7 | 1000 kW | 1000 kW | |||
| 0.93 | 0.92 | 0.062 USD/(kW·h) | |||
| 0.089 USD/(kW·h) | 0.118 USD/(kW·h) | 300 | |||
| 5000 kW | 5 kW | 1000 kW | |||
| 3000 kW·h | 1 | 0.00001 | |||
| 0.3 | 0.2 | 0.2 | |||
| 0.3 | 1 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, P.; Ni, G.; Jin, R.; Wang, H.; Wang, J.; Sun, Z.; Qiu, G. Multi-Timescale Battery-Charging Optimization for Electric Heavy-Duty Truck Battery-Swapping Stations, Considering Source–Load–Storage Uncertainty. Energies 2025, 18, 241. https://doi.org/10.3390/en18020241
Shi P, Ni G, Jin R, Wang H, Wang J, Sun Z, Qiu G. Multi-Timescale Battery-Charging Optimization for Electric Heavy-Duty Truck Battery-Swapping Stations, Considering Source–Load–Storage Uncertainty. Energies. 2025; 18(2):241. https://doi.org/10.3390/en18020241
Chicago/Turabian StyleShi, Peijun, Guojian Ni, Rifeng Jin, Haibo Wang, Jinsong Wang, Zhongwei Sun, and Guizhi Qiu. 2025. "Multi-Timescale Battery-Charging Optimization for Electric Heavy-Duty Truck Battery-Swapping Stations, Considering Source–Load–Storage Uncertainty" Energies 18, no. 2: 241. https://doi.org/10.3390/en18020241
APA StyleShi, P., Ni, G., Jin, R., Wang, H., Wang, J., Sun, Z., & Qiu, G. (2025). Multi-Timescale Battery-Charging Optimization for Electric Heavy-Duty Truck Battery-Swapping Stations, Considering Source–Load–Storage Uncertainty. Energies, 18(2), 241. https://doi.org/10.3390/en18020241