
A CNN-SA-GRU Model with Focal Loss for Fault Diagnosis of Wind Turbine Gearboxes


Abstract
1. Introduction
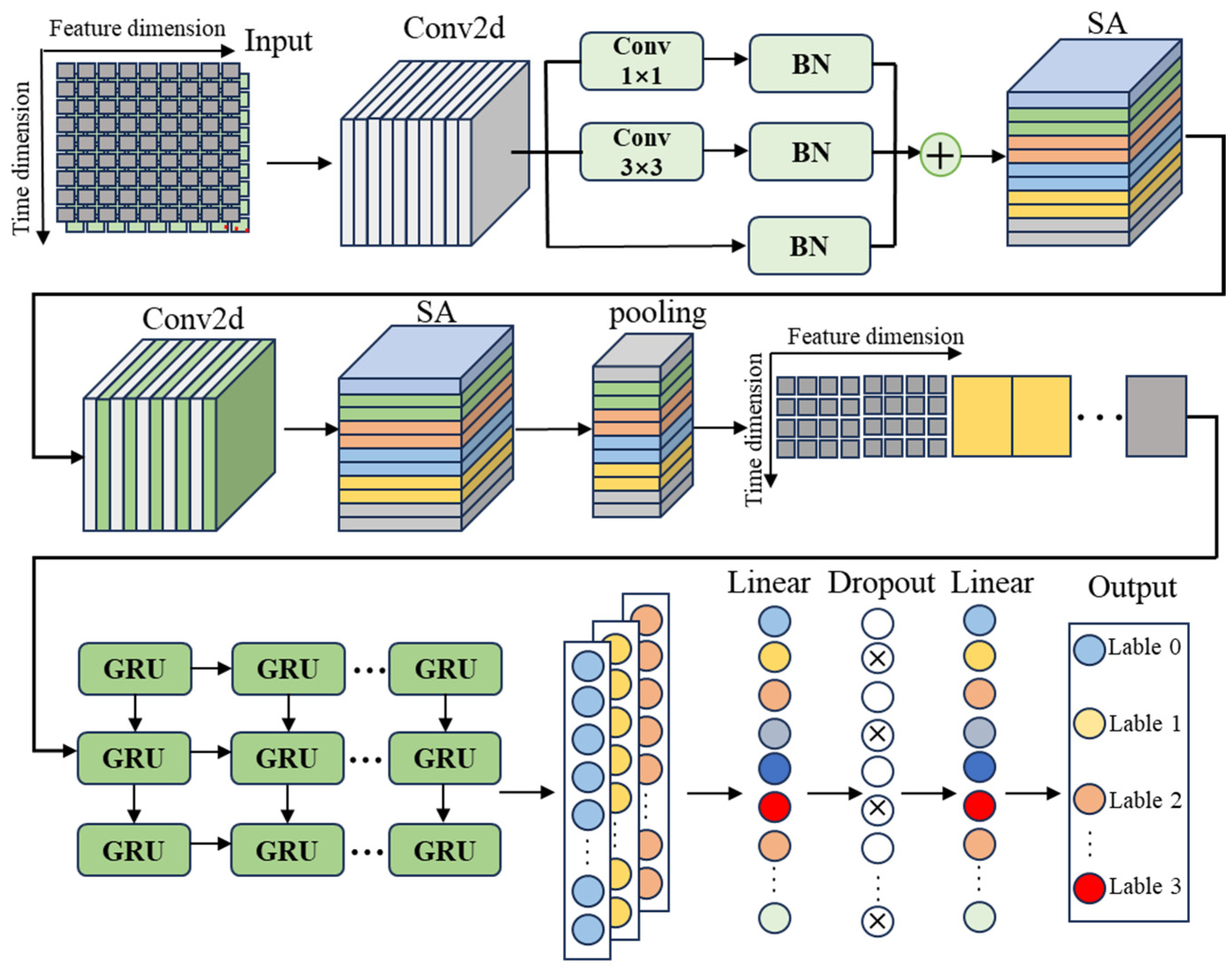
- To capture the spatiotemporal dependencies in SCADA data, a novel CNN-SA-GRU model is proposed. This model enables the deep mining of multi-scale spatiotemporal features embedded in SCADA data, thereby enhancing fault classification accuracy.
- To mitigate the negative impact of fault sample scarcity and class imbalance on diagnostic performance, Focal Loss is employed in place of traditional cross-entropy loss. By assigning higher weights to hard-to-classify samples, the model’s diagnostic capability is significantly improved.
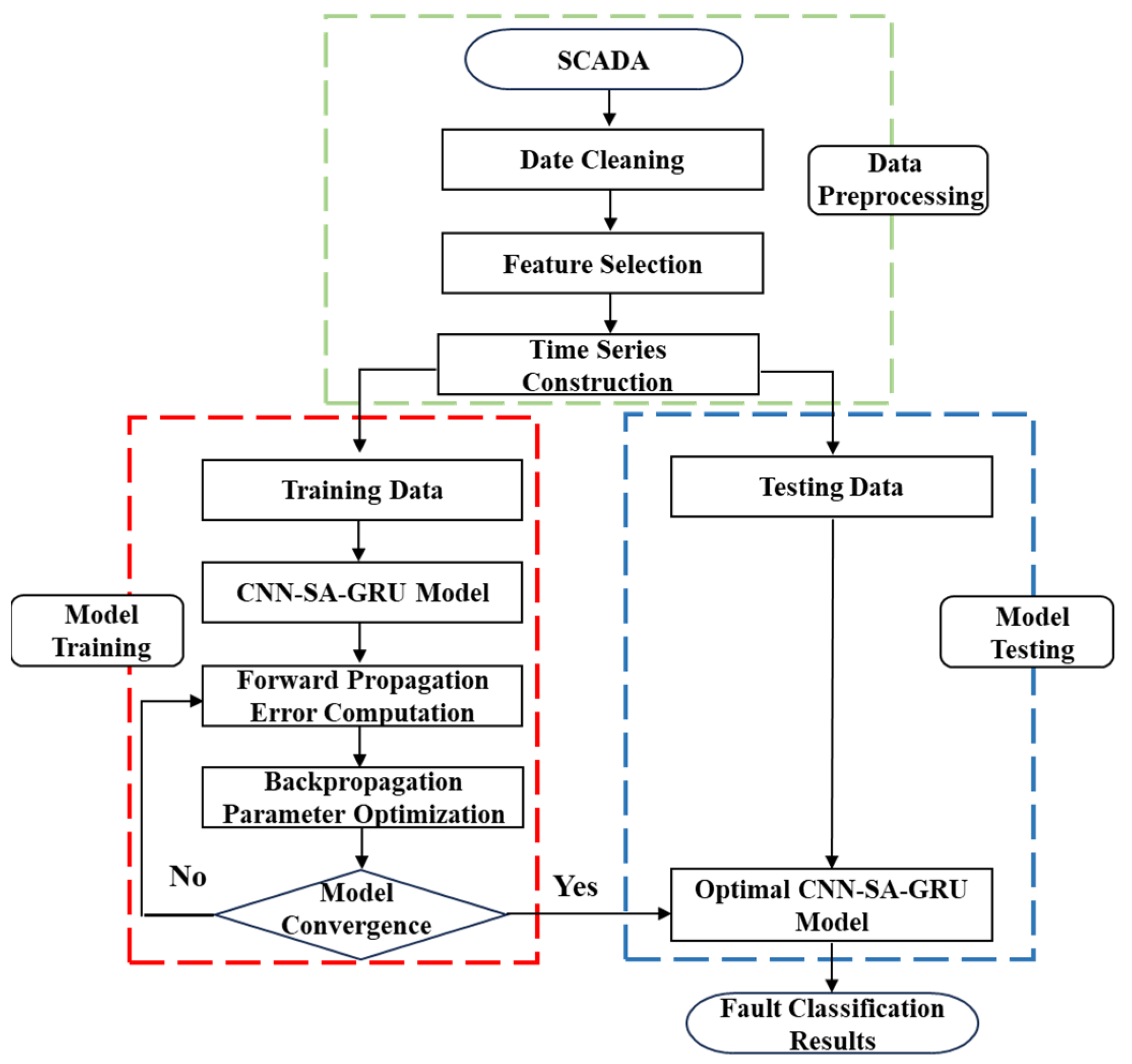
2. Fault Diagnosis Process for Wind Turbine Gearboxes
2.1. Data Normalization
2.2. Feature Selection Feature Extraction
2.3. Evaluation Metrics
3. Model Architecture and Principles
3.1. Convolutional Neural Network
3.2. Shuffle Attention
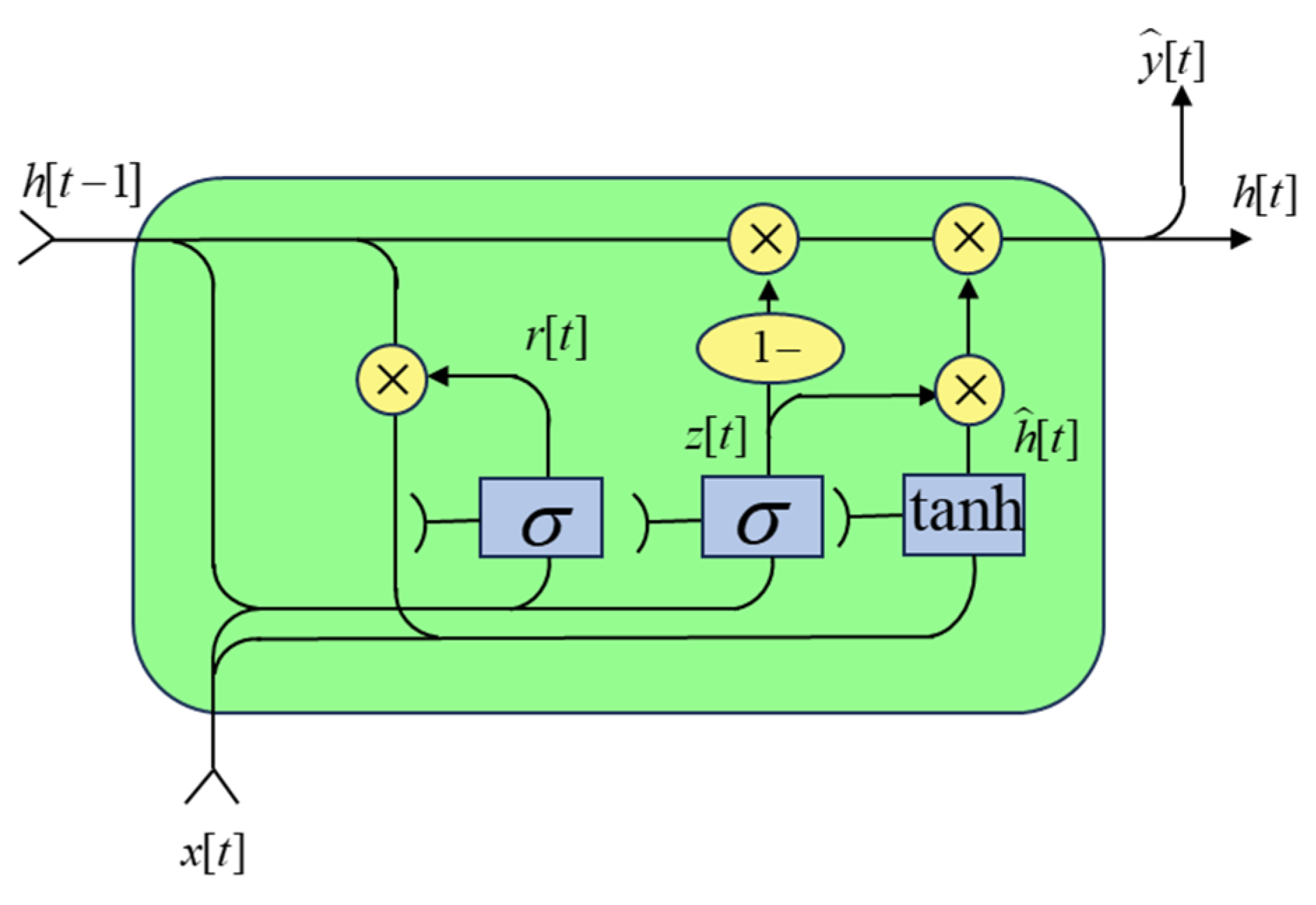
3.3. Gated Recurrent Unit
3.4. Focal Loss
4. Experimental Validation
4.1. Dataset Introduction
4.2. Feature Selection
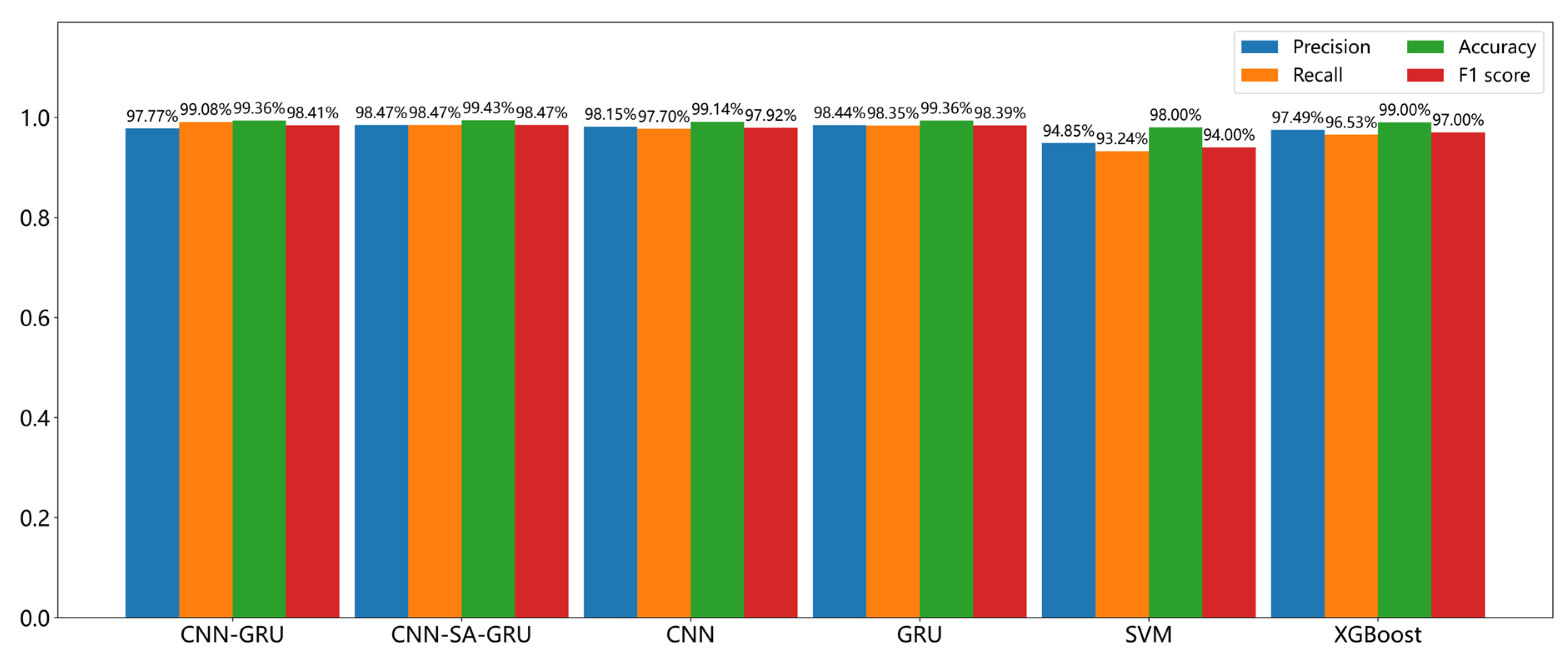
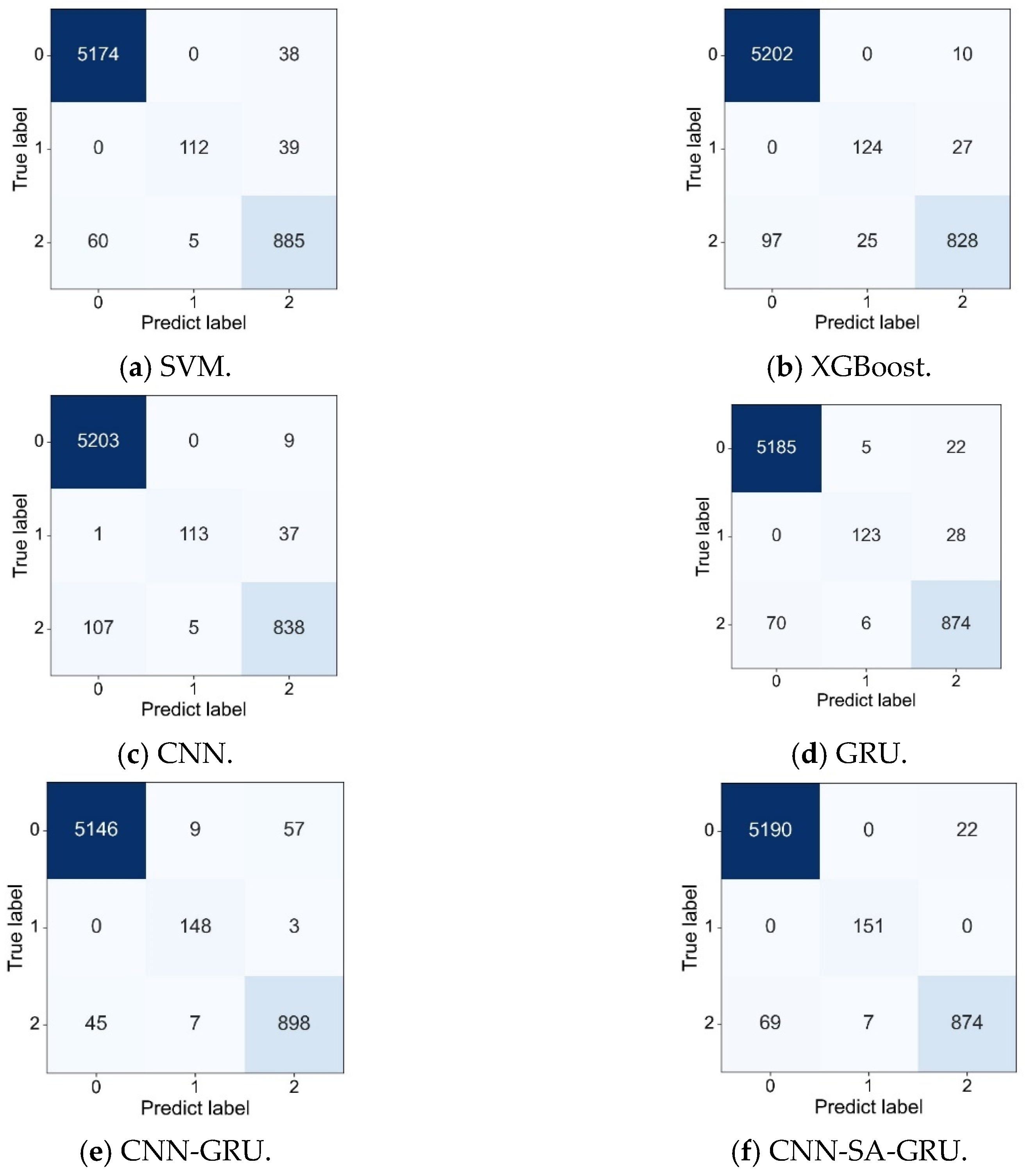
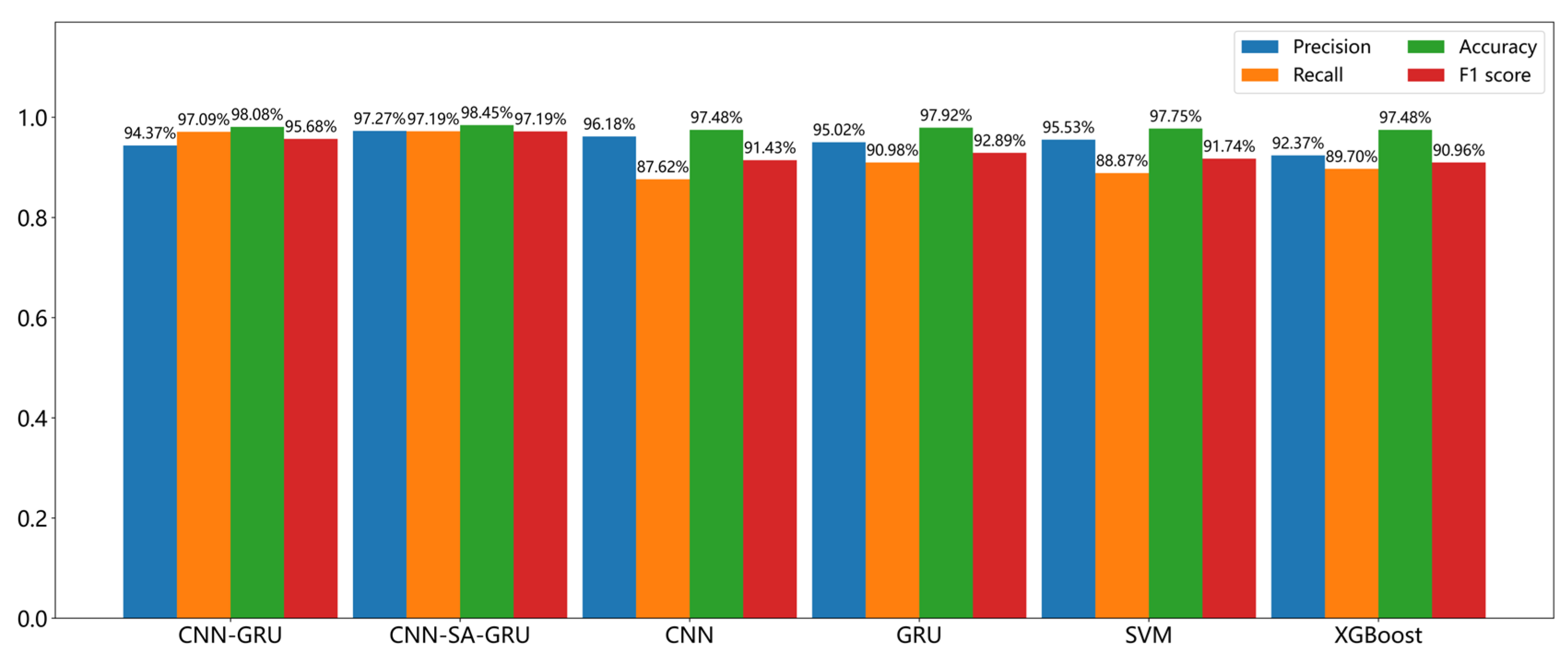
4.3. Comparison of Diagnostic Models
4.4. Performance Evaluation of Focal Loss
5. Conclusions
- (1)
- The proposed CNN-SA-GRU model effectively captures the spatiotemporal features in SCADA data. It achieved an accuracy of 98.45% and an F1 score of 97.19%, representing average improvements of 0.703% and 4.65%, respectively, over the baseline models. These results validate the model’s superiority in feature extraction and fault classification.
- (2)
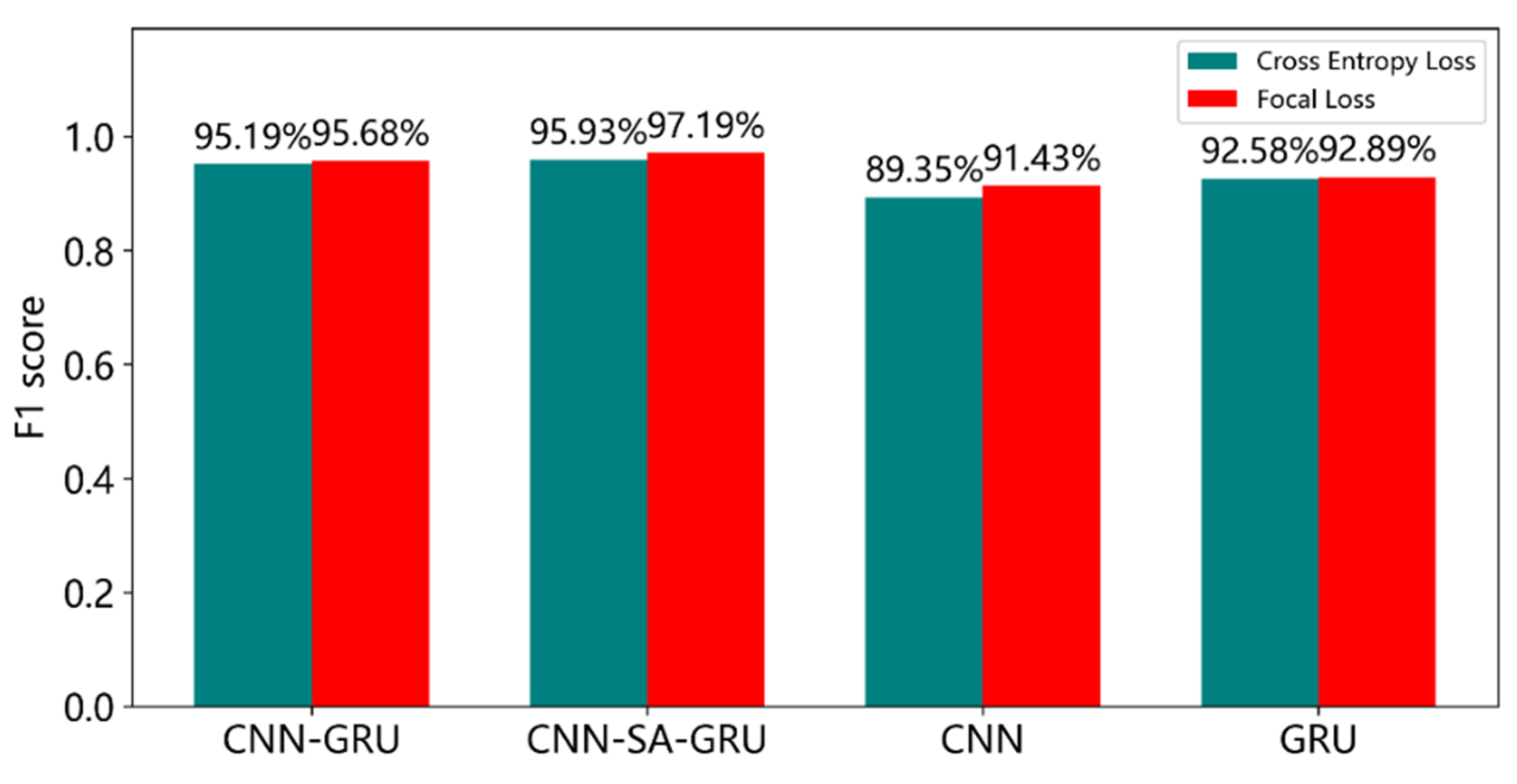
- Neural network models based on Focal Loss can effectively mitigate the performance degradation caused by class imbalance in wind turbine gearbox fault samples. Compared with the traditional cross-entropy loss function, models using Focal Loss achieved an average improvement of 0.24% in accuracy and 1.03% in F1 score, demonstrating the effectiveness of Focal Loss in handling imbalanced classification problems.
- (1)
- Due to the limited types and quantities of fault samples, the proposed method was validated using only two types of fault data. Future research should explore a wider range of fault scenarios to enhance the robustness of the approach.
- (2)
- The hyperparameters of the proposed model were selected empirically without systematic optimization or sensitivity analysis. Future work could investigate the use of automated hyperparameter optimization methods to further improve model performance.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bertling, L.; Ribrant, J. Survey of Failures in Wind Power Systems with Focus on Swedish Wind Power Plants 1997-2005. IEEE Trans. Energy Convers. 2007, 22, 167–173. [Google Scholar] [CrossRef]
- Qiu, Y.; Feng, Y.; Sun, J.; Zhang, W.; Infield, D. Applying Thermophysics for Wind Turbine Drivetrain Fault Diagnosis Using SCADA Data. IET Renew. Power Gen. 2016, 10, 661–668. [Google Scholar] [CrossRef]
- Corley, B.; Koukoura, S.; Carroll, J.; McDonald, A. Combination of Thermal Modelling and Machine Learning Approaches for Fault Detection in Wind Turbine Gearboxes. Energies 2021, 14, 1375. [Google Scholar] [CrossRef]
- Shao, H.; Gao, Z.; Liu, X.; Busawon, K. Parameter-Varying Modelling and Fault Reconstruction for Wind Turbine Systems. Renew. Energy 2018, 116, 145–152. [Google Scholar] [CrossRef]
- Zhang, C.; Hu, D.; Yang, T. Anomaly Detection and Diagnosis for Wind Turbines Using Long Short-Term Memory-Based Stacked Denoising Autoencoders and XGBoost. Reliability Engineering & System Safety 2022, 222, 108445. [Google Scholar] [CrossRef]
- Wang, D.; Cao, C.; Chen, N.; Pan, W.; Li, H.; Wang, X. A Correlation-Graph-CNN Method for Fault Diagnosis of Wind Turbine Based on State Tracking and Data Driving Model. Sustain. Energy Technol. Assess. 2023, 56, 102995. [Google Scholar] [CrossRef]
- Xiang, L.; Wang, P.; Yang, X.; Hu, A.; Su, H. Fault Detection of Wind Turbine Based on SCADA Data Analysis Using CNN and LSTM with Attention Mechanism. Measurement 2021, 175, 109094. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, B.; Wang, Z.; Zhang, J. An FSK-MBCNN Based Method for Compound Fault Diagnosis in Wind Turbine Gearboxes. Measurement 2021, 172, 108933. [Google Scholar] [CrossRef]
- Zhang, K.; Tang, B.; Deng, L.; Liu, X. A Hybrid Attention Improved ResNet Based Fault Diagnosis Method of Wind Turbines Gearbox. Measurement 2021, 179, 109491. [Google Scholar] [CrossRef]
- Zhang, Y.; Lv, Y.; Ge, M. Time–Frequency Analysis via Complementary Ensemble Adaptive Local Iterative Filtering and Enhanced Maximum Correlation Kurtosis Deconvolution for Wind Turbine Fault Diagnosis. Energy Rep. 2021, 7, 2418–2435. [Google Scholar] [CrossRef]
- Ma, Z.; Zhao, M.; Luo, M.; Gou, C.; Xu, G. An Integrated Monitoring Scheme for Wind Turbine Main Bearing Using Acoustic Emission. Signal Process. 2023, 205, 108867. [Google Scholar] [CrossRef]
- Schlechtingen, M.; Ferreira Santos, I. Comparative Analysis of Neural Network and Regression Based Condition Monitoring Approaches for Wind Turbine Fault Detection. Mech. Syst. Signal Process. 2011, 25, 1849–1875. [Google Scholar] [CrossRef]
- Liu, J.; Yang, G.; Li, X.; Hao, S.; Guan, Y.; Li, Y. A Deep Generative Model Based on CNN-CVAE for Wind Turbine Condition Monitoring. Meas. Sci. Technol. 2023, 34, 035902. [Google Scholar] [CrossRef]
- Zhang, G.; Li, Y.; Zhao, Y. A Novel Fault Diagnosis Method for Wind Turbine Based on Adaptive Multivariate Time-Series Convolutional Network Using SCADA Data. Adv. Eng. Inform. 2023, 57, 102031. [Google Scholar] [CrossRef]
- Xiang, L.; Yang, X.; Hu, A.; Su, H.; Wang, P. Condition Monitoring and Anomaly Detection of Wind Turbine Based on Cascaded and Bidirectional Deep Learning Networks. Appl. Energy 2022, 305, 117925. [Google Scholar] [CrossRef]
- Jiang, G.; He, H.; Yan, J.; Xie, P. Multiscale Convolutional Neural Networks for Fault Diagnosis of Wind Turbine Gearbox. IEEE Trans. Ind. Electron. 2019, 66, 3196–3207. [Google Scholar] [CrossRef]
- Chen, B.; Xie, L.; Li, Y.; Gao, B. Acoustical Damage Detection of Wind Turbine Yaw System Using Bayesian Network. Renew. Energy 2020, 160, 1364–1372. [Google Scholar] [CrossRef]
- López De Calle, K.; Ferreiro, S.; Roldán-Paraponiaris, C.; Ulazia, A. A Context-Aware Oil Debris-Based Health Indicator for Wind Turbine Gearbox Condition Monitoring. Energies 2019, 12, 3373. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Xie, F.; Wu, S.; Li, D. Condition Monitoring of Wind Turbines with the Implementation of Spatio-Temporal Graph Neural Network. Eng. Appl. Artif. Intell. 2023, 121, 106000. [Google Scholar] [CrossRef]
- Pang, Y.; He, Q.; Jiang, G.; Xie, P. Spatio-Temporal Fusion Neural Network for Multi-Class Fault Diagnosis of Wind Turbines Based on SCADA Data. Renew. Energy 2020, 161, 510–524. [Google Scholar] [CrossRef]
- Feng, C.; Liu, C.; Jiang, D. Root Cause Localization for Wind Turbines Using Physics Guided Multivariate Graphical Modeling and Fault Propagation Analysis. Knowl.-Based Syst. 2024, 295, 111838. [Google Scholar] [CrossRef]
- Wang, Z.; Jiang, X.; Xu, Z.; Cai, C.; Wang, X.; Xu, J.; Zhong, X.; Yang, W.; Li, Q. An Early Anomaly Detection of Wind Turbine Gearbox Based on SLFormer Neural Network. Ocean Eng. 2024, 311, 118925. [Google Scholar] [CrossRef]
- Lei, J.; Liu, C.; Jiang, D. Fault Diagnosis of Wind Turbine Based on Long Short-Term Memory Networks. Renew. Energy 2019, 133, 422–432. [Google Scholar] [CrossRef]
- Wang, T.; Yin, L. A Hybrid 3DSE-CNN-2DLSTM Model for Compound Fault Detection of Wind Turbines. Expert Syst. Appl. 2024, 242, 122776. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-Based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Zhang, Q.-L.; Yang, Y.-B. SA-Net: Shuffle Attention for Deep Convolutional Neural Networks. In Proceedings of the ICASSP 2021–2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 2235–2239. [Google Scholar]
- Tao, C.; Tao, T.; Bai, X.; Liu, Y. Wind Turbine Blade Icing Prediction Using Focal Loss Function and CNN-Attention-GRU Algorithm. Energies 2023, 16, 5621. [Google Scholar] [CrossRef]
- Cai, J.; Wang, S.; Xu, C.; Guo, W. Unsupervised Deep Clustering via Contractive Feature Representation and Focal Loss. Pattern Recognit. 2022, 123, 108386. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. WT | Fault Type | Fault Code |
|---|---|---|
| #32 | / | 0 |
| #15, #14 | High-Speed Shaft Temperature Exceeds Limit | 1 |
| #26, #7 | Gearbox Lubricating Oil Overtemperature | 2 |
| / | Correlation Coefficient | |
|---|---|---|
| Feature | Gearbox Oil Temperature | Gearbox High-Speed Shaft Bearing Temperature |
| Wind Speed | 0.586 | 0.759 |
| Active Power on Grid Side | 0.557 | 0.722 |
| Rotor Speed | 0.582 | 0.771 |
| Phase A Current | 0.556 | 0.722 |
| Nacelle Temperature | 0.487 | 0.257 |
| Gearbox Oil Temperature | 1.000 | 0.936 |
| Stator Winding Temperature | 0.519 | 0.494 |
| Gearbox Low-Speed Shaft Bearing Temperature | 0.849 | 0.969 |
| Gearbox High-Speed Shaft Bearing Temperature | 0.936 | 1.000 |
| Generator Bearing A Temperature | 0.440 | 0.281 |
| Generator Bearing B Temperature | 0.797 | 0.682 |
| CNN-SA-GRU | Kernel Size | Channels | Activation Function | Padding |
|---|---|---|---|---|
| Conv2d | 3 × 3 | 128 | Relu | 1 |
| MSConv2d | 1 × 1,3 × 3 | 64,64 | Relu | 0,1 |
| SA | / | 64 | / | / |
| Conv2d | 3 × 3 | 64 | Relu | 1 |
| BN | / | 64 | / | / |
| SA | / | 64 | / | / |
| Avg Pooling | 2 × 2 | / | / | 0 |
| GRU | / | 128 | Relu | / |
| GRU | / | 128 | Relu | / |
| Linear | / | 64 | Relu | / |
| Linear | / | 3 | Relu | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Dai, S.; Kang, Z.; Han, S.; Zhang, G.; Liu, Y. A CNN-SA-GRU Model with Focal Loss for Fault Diagnosis of Wind Turbine Gearboxes. Energies 2025, 18, 3696. https://doi.org/10.3390/en18143696
Wang L, Dai S, Kang Z, Han S, Zhang G, Liu Y. A CNN-SA-GRU Model with Focal Loss for Fault Diagnosis of Wind Turbine Gearboxes. Energies. 2025; 18(14):3696. https://doi.org/10.3390/en18143696
Chicago/Turabian StyleWang, Liqiang, Shixian Dai, Zijian Kang, Shuang Han, Guozhen Zhang, and Yongqian Liu. 2025. "A CNN-SA-GRU Model with Focal Loss for Fault Diagnosis of Wind Turbine Gearboxes" Energies 18, no. 14: 3696. https://doi.org/10.3390/en18143696
APA StyleWang, L., Dai, S., Kang, Z., Han, S., Zhang, G., & Liu, Y. (2025). A CNN-SA-GRU Model with Focal Loss for Fault Diagnosis of Wind Turbine Gearboxes. Energies, 18(14), 3696. https://doi.org/10.3390/en18143696