

Wireless Temperature Monitoring of a Shaft Based on Piezoelectric Energy Harvesting

Abstract
1. Introduction
2. Materials and Methods
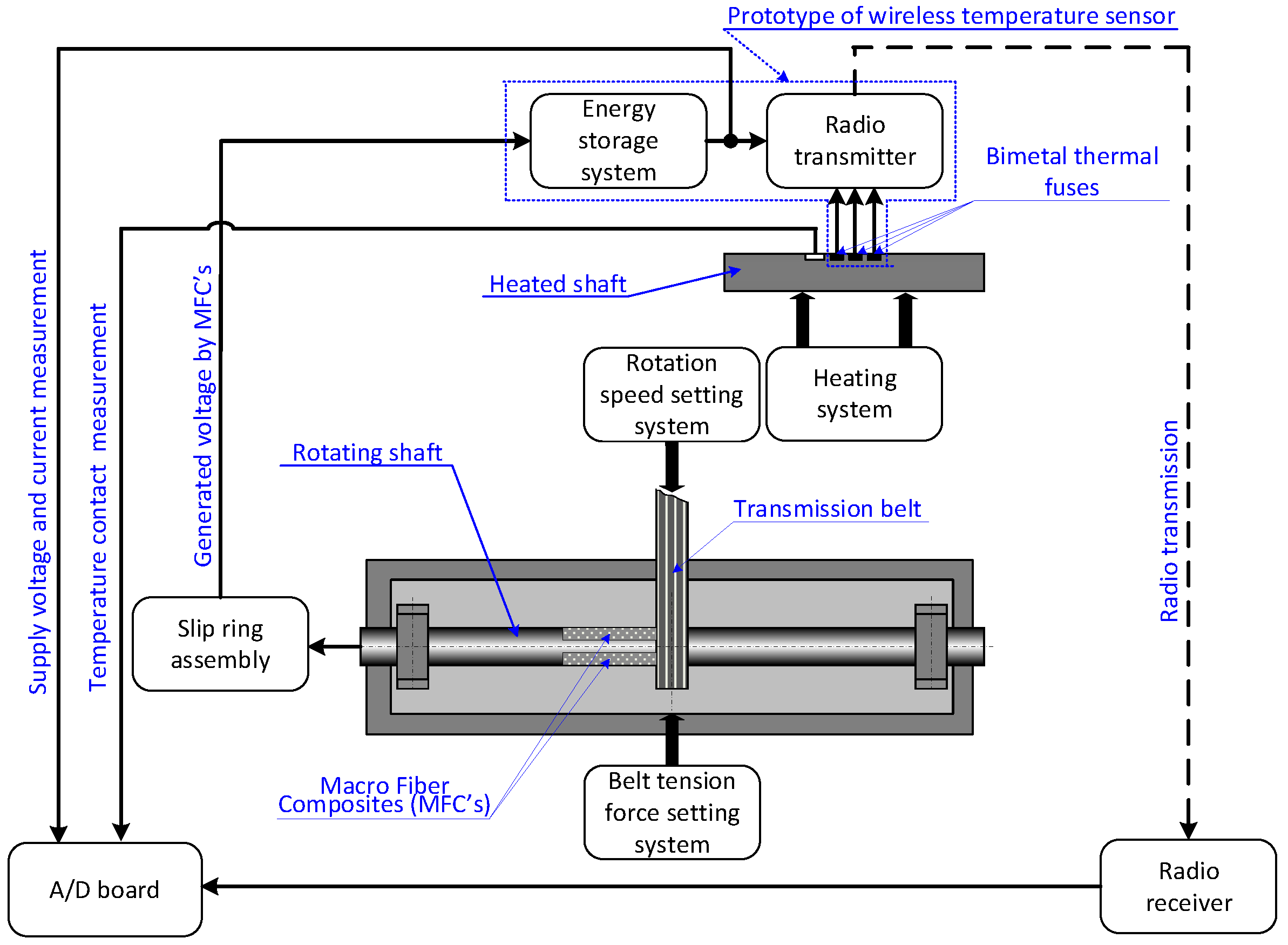
2.1. Laboratory Setup
2.2. Structure of Prototype of Wireless Temperature Monitoring
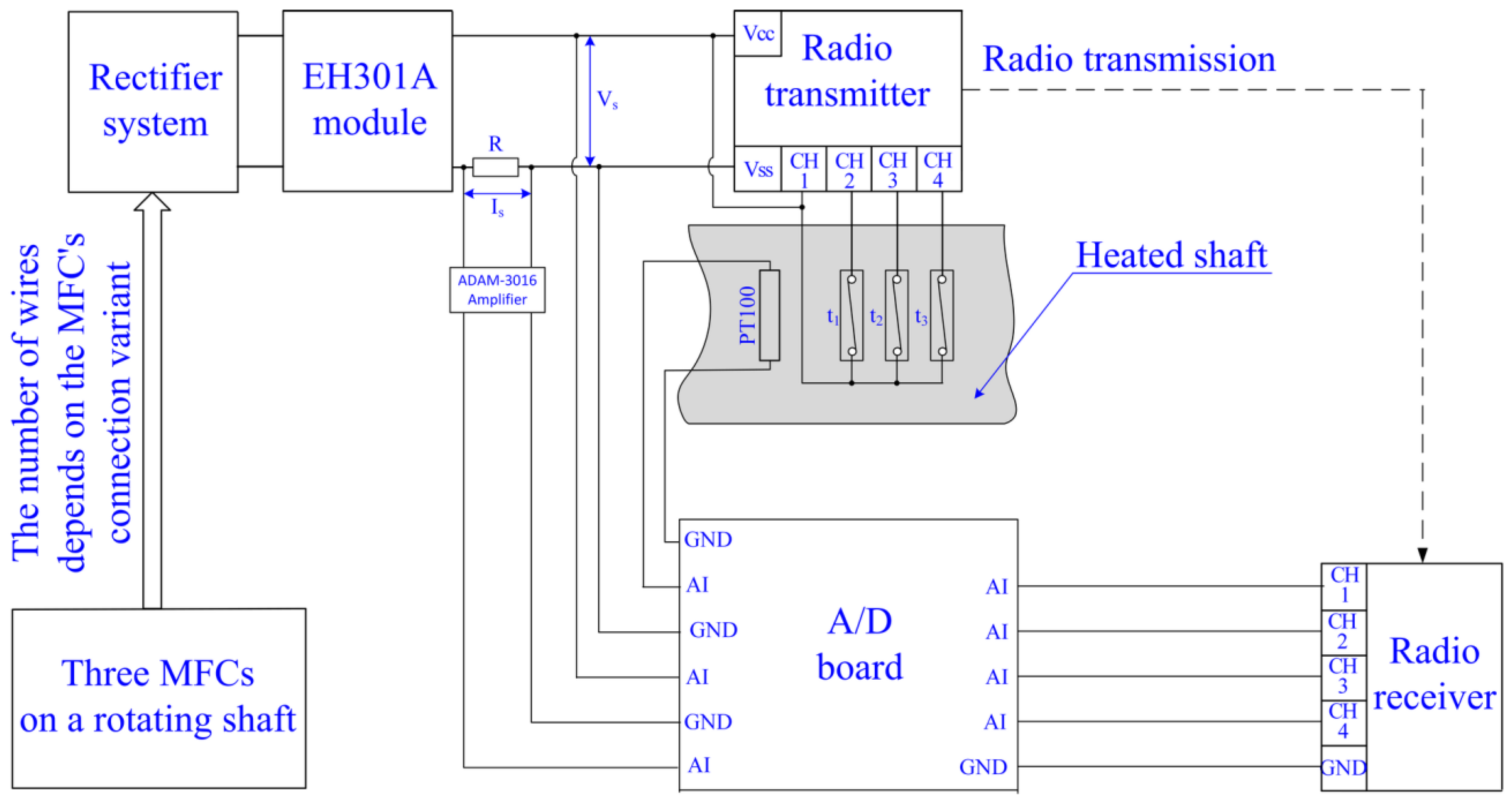
2.3. Measurement System
- A DaqBoard2000 A/D board produced by IOtech was used in the experiments. The parameters of the board were resolution: 16 bit, max frequency: 200 kHz, measuring range: ±10 V, accuracy: 0.0015%, reading: ±0.005% of range, and input resistance: 20 MΩ;
- A resistor of 1 Ω with accuracy equal to 0.1% and an ADAM-3016 amplifier produced by Advantech were used to measure the current. The parameters of the amplifier were gain: 1000 and accuracy: 0.1% of range;
- A load cell and an ADAM-3016 amplifier were used to measure the force. The parameters of the load cell were measuring range: 1000 N and accuracy: 0.1%;
- A PT100 sensor was used for wired measurement of the temperature.
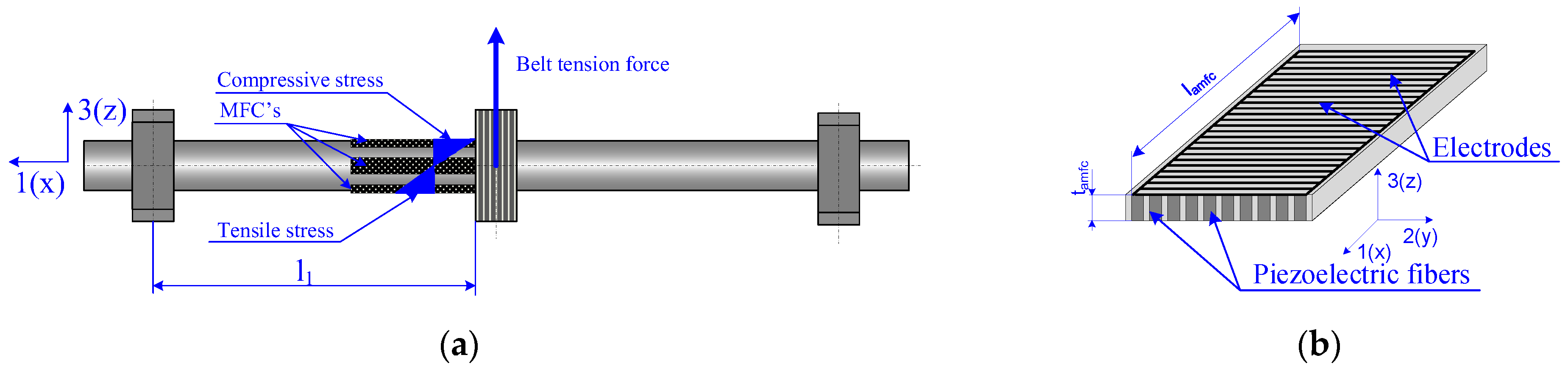
3. Energy Harvesting from Rotating Shaft Based Piezoelectric Materials
- The piezoelectric constant of MFC patch;
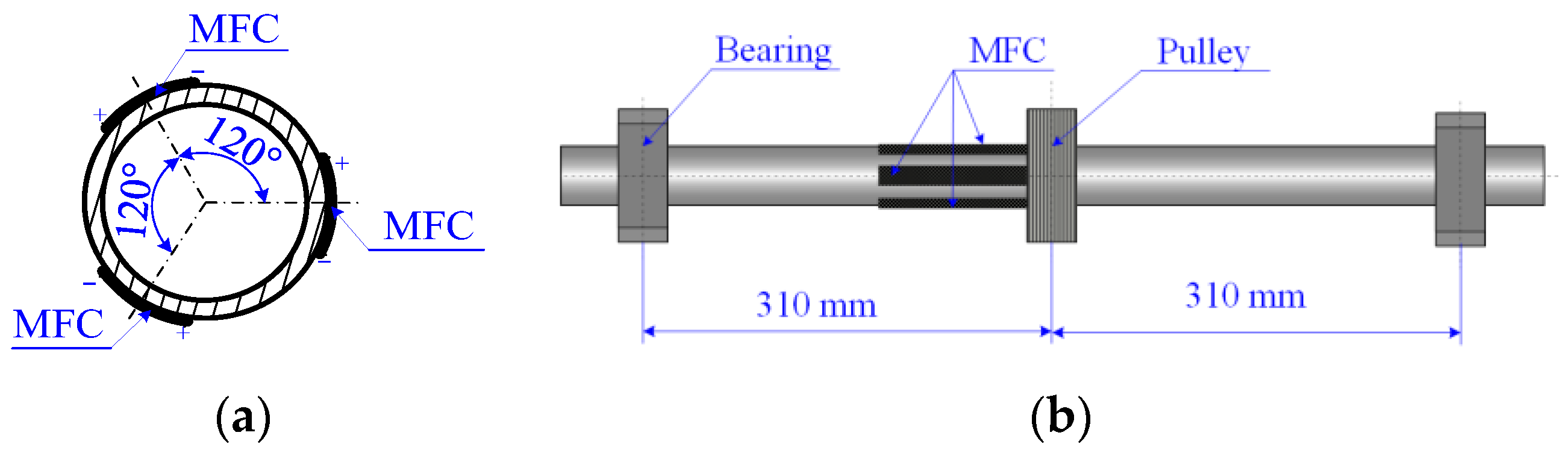
- The dimensions of active part of MFC patch;
- The dimensions of rotating shaft;
- The value of the force acting on the shaft from the transmission belt;
- The shaft’s rotational speed.
- The number of these factors can be reduced by replacing the force acting on the shaft and the shaft dimensions by the stresses generated in the shaft by this force at these shaft dimensions (as shown in (5)). This allows the obtained results to be generalized to shafts of any dimensions and any transverse force loading. Considering these conclusions, the courses of the variables determined in the laboratory experiments were determined as a function of stress in the rotating shaft and as a function of the rotational speed of this shaft for selected values of the dimensions of the piezoelectric composite.
4. Results and Discussion
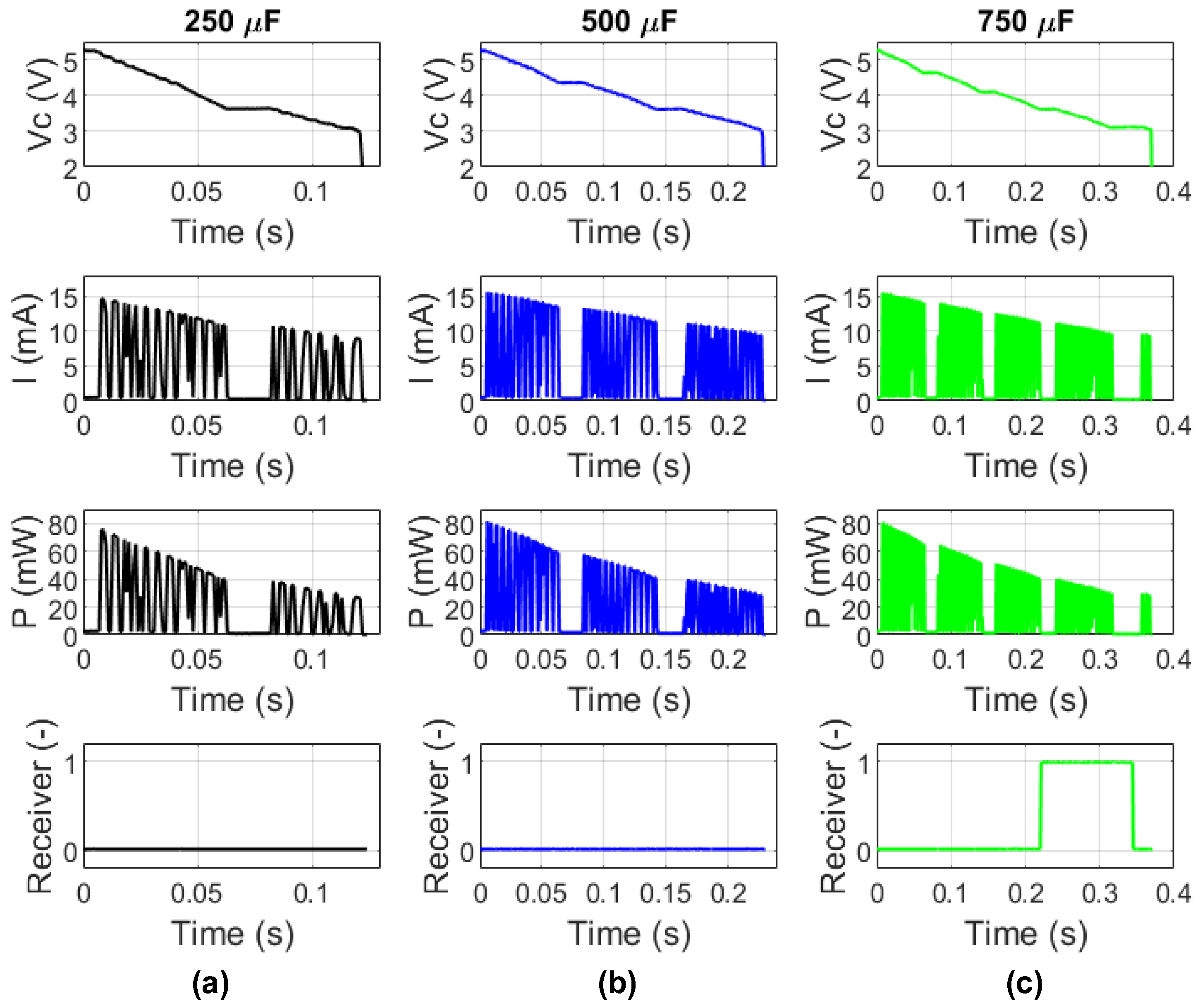
4.1. Selection of the Storage Capacitor
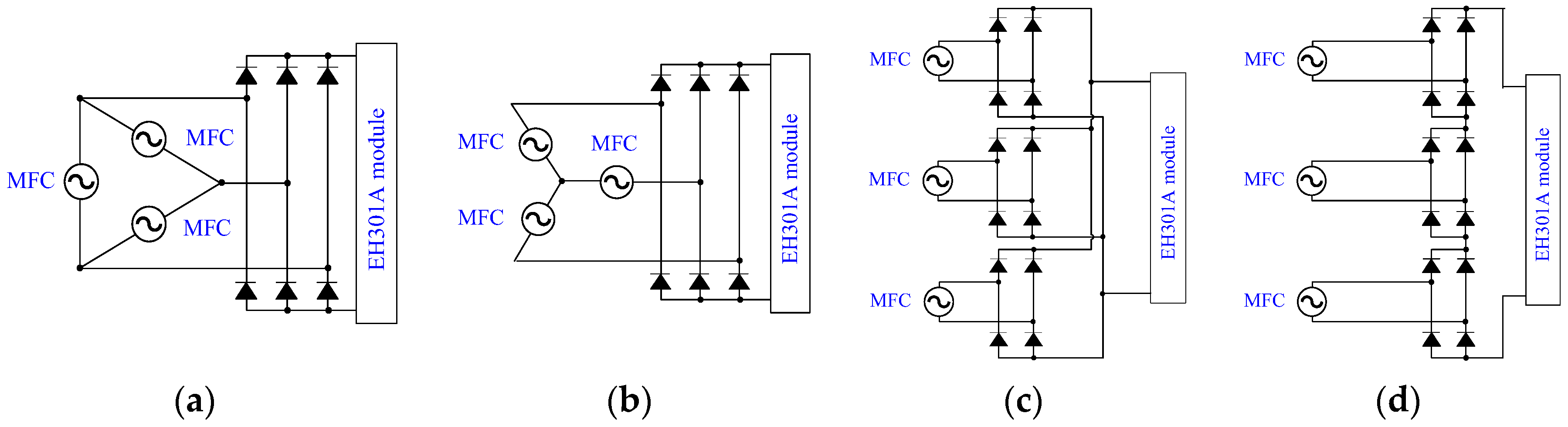
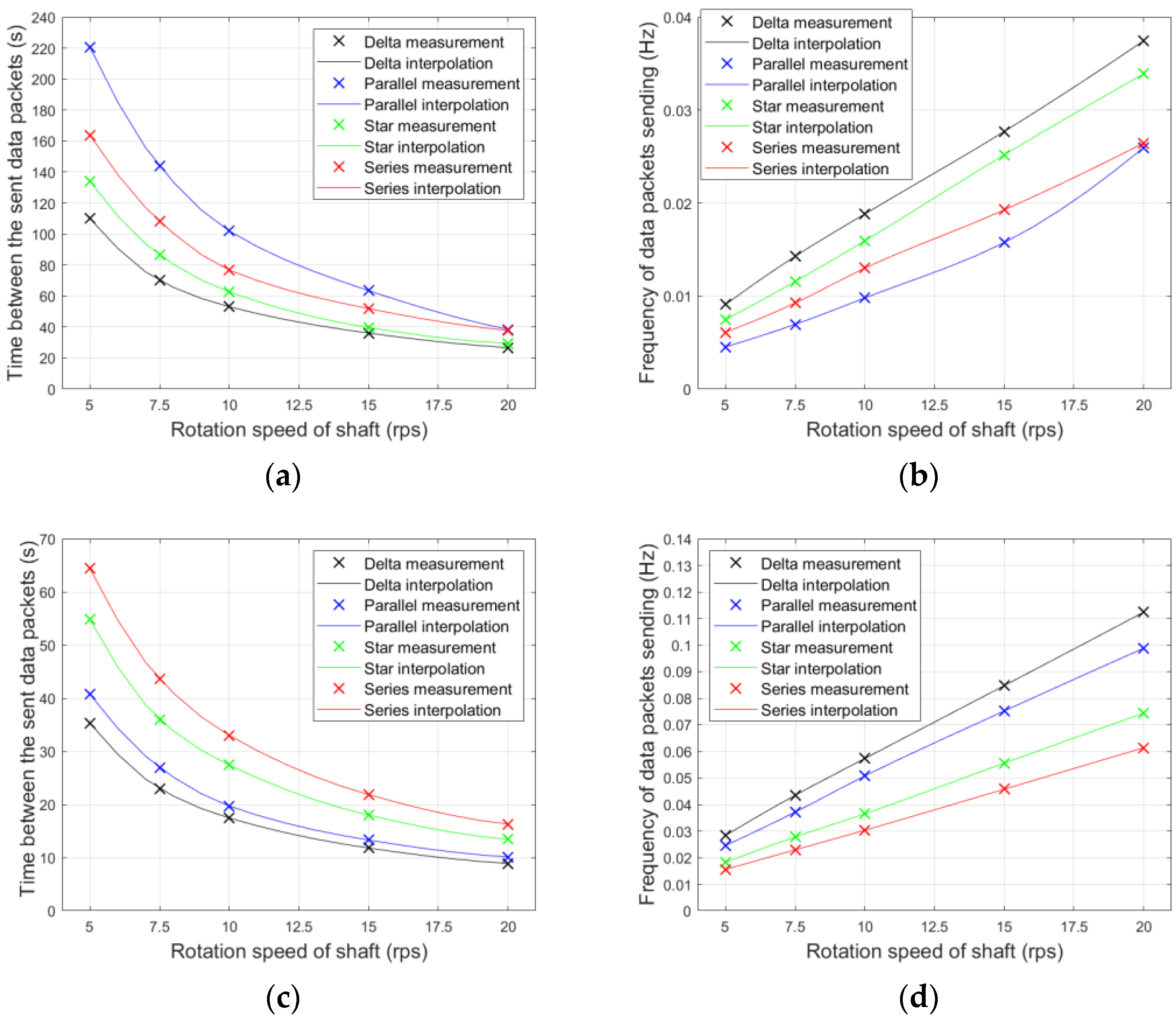
4.2. Selection of the MFCs’ Connection
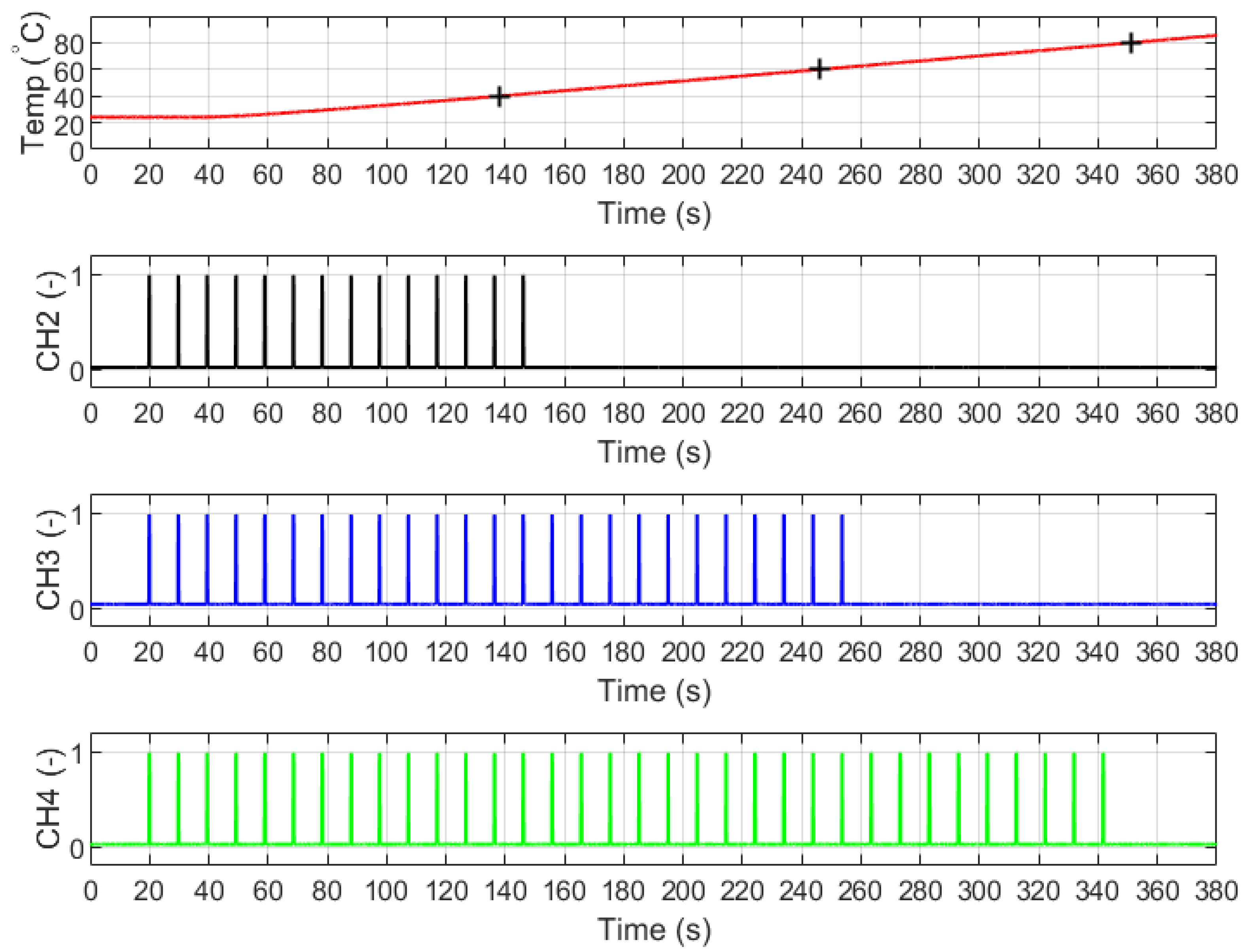
4.3. Operating of Wireless Temperature Monitoring
5. Conclusions
- There are three parameters that influence the frequency of sending data packets by the presented wireless temperature monitoring: (1) amplitude of stress in the rotating shaft, (2) rotation speed of the shaft, (3) and the capacity of a storage capacitor;
- The capacity of a storage capacitor depends on the one hand on the need to send a full data packet, and on the other hand on the need to send data packets as often as possible. It is possible to determine the minimum capacitance of the storage capacitor at which a full data packet is sent. Considering that the larger the capacitance of the capacitor, the longer the time between sending data packets, the capacitance of the capacitor should be slightly larger than the minimum for correct sending of a full data packet;
- A delta connection of MFC patches enables the fastest capacitor charging and therefore the shortest time between the sent data packets in cases of larger values of shaft rotation speed and larger values of shaft stress amplitude. For lower values of these quantities, the star connection of MFC patches becomes a better choice for achieving the shortest time between the sent data packets. For known dimensions of the active part of the MFC patches and the known rotational speed of the shaft, the threshold of stress amplitude in the shaft can be determined, above which the delta connection will be more effective.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Symbols and Abbreviations
| S | Strain |
| T | Stress |
| D | Electric displacement |
| E | Electric field |
| sE | Compliance constant under constant electric field |
| εT | Permittivity under constant stress |
| ip | Electric current generated by MFC patch |
| Vp | Voltage generated by MFC patch |
| wamfc | Width of active part of MFC patch |
| tamfc | Thickness of piezoelectric fibers in MFC patch |
| lamfc | Length of active part of MFC patch |
| l1 | Distance between bearing and the grooved pulley |
| Mb | Bending moment into MFC patch |
| Ymfc | Young modulus of piezoelectric fibers |
| Ys | Young modulus of shaft material |
| Wy | Resistance moment about the neutral axis |
| Fbt | Force acting on the shaft from the transmission belt |
| dso | External diameter of shaft |
| dsc | Internal diameter of shaft |
| f | Rotation speed of shaft |
| MFC | Macro Fiber Composite |
| A/D | Analog/Digital |
| RF | Radio Frequency |
| IF | Infrared |
References
- Jiao, P.; Egbe, K.J.I.; Xie, Y.; Matin Nazar, A.; Alavi, A.H. Piezoelectric sensing techniques in structural health monitoring: A state-of-the-art review. Sensors 2020, 20, 3730. [Google Scholar] [PubMed]
- Zhang, C.; Mousavi, A.A.; Masri, S.F.; Gholipour, G.; Yan, K.; Li, X. Vibration feature extraction using signal processing techniques for structural health monitoring: A review. Mech. Syst. Signal Process. 2022, 177, 109175. [Google Scholar]
- Butler, Q.; Ziada, Y.; Stephenson, D.; Andrew Gadsden, S. Condition monitoring of machine tool feed drives: A review. J. Manuf. Sci. Eng. 2022, 144, 100802. [Google Scholar]
- Tonks, O.; Wang, Q. The detection of wind turbine shaft misalignment using temperature monitoring. CIRP J. Manuf. Sci. Technol. 2017, 17, 71–79. [Google Scholar]
- Mian, T.; Choudhary, A.; Fatima, S. Multi-sensor fault diagnosis for misalignment and unbalance detection using machine learning. IEEE Trans. Ind. Appl. 2023, 59, 5749–5759. [Google Scholar]
- Ji, J.; Yan, B.; Xiao, B.; Wei, Y.; Sun, C.; Ding, M. Design, construction and modeling of a small-scale high temperature field rotor test rig. Case Stud. Therm. Eng. 2023, 49, 103279. [Google Scholar]
- Nembhard, A.D.; Sinha, J.K.; Pinkerton, A.J.; Elbhbah, K. Combined vibration and thermal analysis for the condition monitoring of rotating machinery. Struct. Health Monit. 2014, 13, 281–295. [Google Scholar]
- Klemme, H. Heat exchangers for liquid-free cooling of rotating shafts. CIRP Ann. 2023, 72, 361–364. [Google Scholar]
- Hasegawa, T.; Kawashima, N. A new technique to measure the temperature of a rotating motor shaft. Appl. Therm. Eng. 2009, 29, 317–323. [Google Scholar]
- Kovacs, A.; Peroulis, D.; Sadeghi, F. Early-warning wireless telemeter for harsh-environment bearings. In Proceedings of the SENSORS, 2007 IEEE, Atlanta, GA, USA, 28–31 October 2007; pp. 946–949. [Google Scholar]
- Zhou, X.; Zhang, H.; Hao, X.; Liao, X.; Han, Q. Investigation on thermal behavior and temperature distribution of bearing inner and outer rings. Tribol. Int. 2019, 130, 289–298. [Google Scholar]
- Zhang, Z.; Xiang, H.; Tang, L.; Yang, W. A comprehensive analysis of piezoelectric energy harvesting from bridge vibrations. J. Phys. D Appl. Phys. 2022, 56, 014001. [Google Scholar]
- Grzybek, D. Piezoelectric generator for the Power Supply of the Monitoring System. In Proceedings of the 2014 15th International Carpathian Control Conference (ICCC), Velke Karlovice, Czech Republic, 28–30 May 2014; pp. 135–138. [Google Scholar]
- Safaei, M.; Sodano, H.A.; Anton, S.R. A review of energy harvesting using piezoelectric materials: State-of-the-art a decade later (2008–2018). Smart Mater. Struct. 2019, 28, 113001. [Google Scholar]
- Chilabi, H.J.; Salleh, H.; Al-Ashtari, W.; Supeni, E.E.; Abdullah, L.C.; As’arry, A.B.; Rezali, K.A.M.; Azwan, M.K. Rotational piezoelectric energy harvesting: A comprehensive review on excitation elements, designs, and performances. Energies 2021, 14, 3098. [Google Scholar] [CrossRef]
- Micek, P.; Grzybek, D. Impact of a connection structure of Macro Fiber Composite patches on energy storage in piezoelectric energy harvesting from a rotating shaft. Energies 2022, 15, 6254. [Google Scholar] [CrossRef]
- Huang, Q.; Tang, B.; Deng, L.; Wang, J. A divide-and-compress lossless compression scheme for bearing vibration signals in wireless sensor networks. Measurement 2015, 67, 51–60. [Google Scholar]
- Grossi, M. Energy harvesting strategies for wireless sensor networks and mobile devices: A review. Electronics 2021, 10, 661. [Google Scholar] [CrossRef]
- Shirvanimoghaddam, M.; Shirvanimoghaddam, K.; Abolhasani, M.M.; Farhangi, M.; Barsari, V.Z.; Liu, H.; Dohler, M.; Naebe, M. Towards a green and self-powered Internet of Things using piezoelectric energy harvesting. IEEE Access 2019, 7, 94533–94556. [Google Scholar]
- Le Scornec, J.; Guiffard, B.; Seveno, R.; Le Cam, V.; Ginestar, S. Self-powered communicating wireless sensor with flexible aero-piezoelectric energy harvester. Renew. Energy 2022, 184, 551–563. [Google Scholar]
- Wang, Z.; He, L.; Gu, X.; Yang, S.; Wang, S.; Wang, P.; Cheng, G. Rotational energy harvesting systems using piezoelectric materials: A review. Rev. Sci. Instrum. 2021, 92, 041501. [Google Scholar]
- EH300/301 Epad® Energy HarvestingTM Modules. Available online: https://www.mouser.pl/datasheet/2/8/EH300-1651600.pdf (accessed on 4 June 2025).
- Yang, Y.; Tang, L.; Li, H. Vibration energy harvesting using macro-fiber composites. Smart Mater. Struct. 2009, 18, 115025. [Google Scholar]
- Wang, Q.M.; Cross, L.E. Constitutive equations of symmetrical triple layer piezoelectric benders. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1999, 46, 1343–1351. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bending Force (N) | Bending Moment (N × mm) | Stress Amplitude (MPa) |
|---|---|---|
| 100 | 25,000 | 11.575725 |
| 125 | 31,250 | 14.469656 |
| 150 | 37,500 | 17.363587 |
| 225 | 56,250 | 26.045381 |
| 300 | 75,000 | 34.727174 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Micek, P.; Grzybek, D. Wireless Temperature Monitoring of a Shaft Based on Piezoelectric Energy Harvesting. Energies 2025, 18, 3620. https://doi.org/10.3390/en18143620
Micek P, Grzybek D. Wireless Temperature Monitoring of a Shaft Based on Piezoelectric Energy Harvesting. Energies. 2025; 18(14):3620. https://doi.org/10.3390/en18143620
Chicago/Turabian StyleMicek, Piotr, and Dariusz Grzybek. 2025. "Wireless Temperature Monitoring of a Shaft Based on Piezoelectric Energy Harvesting" Energies 18, no. 14: 3620. https://doi.org/10.3390/en18143620
APA StyleMicek, P., & Grzybek, D. (2025). Wireless Temperature Monitoring of a Shaft Based on Piezoelectric Energy Harvesting. Energies, 18(14), 3620. https://doi.org/10.3390/en18143620