
Toward Sustainable Mobility: AI-Enabled Automated Refueling for Fuel Cell Electric Vehicles

 ,
,  , , and
, , and
Abstract
1. Introduction
2. Technological Background and Research Contribution
2.1. BEVs vs. FCEVs: Working Principles, Infrastructure and Challenges
2.2. Related Work
2.3. Research Contribution
3. Data Acquisition and Energy Consumption Simulation
3.1. Original Datasets and Preprocessing
3.2. Demand and Stop Probability Assessment
3.3. Artificial Dataset Generation
4. Methodology
4.1. Energy Consumption Forecasting
4.1.1. Data Preparation
4.1.2. Model Training
4.1.3. Model Evaluation
4.2. Automation of the Refueling Procedure
5. Experimental Results
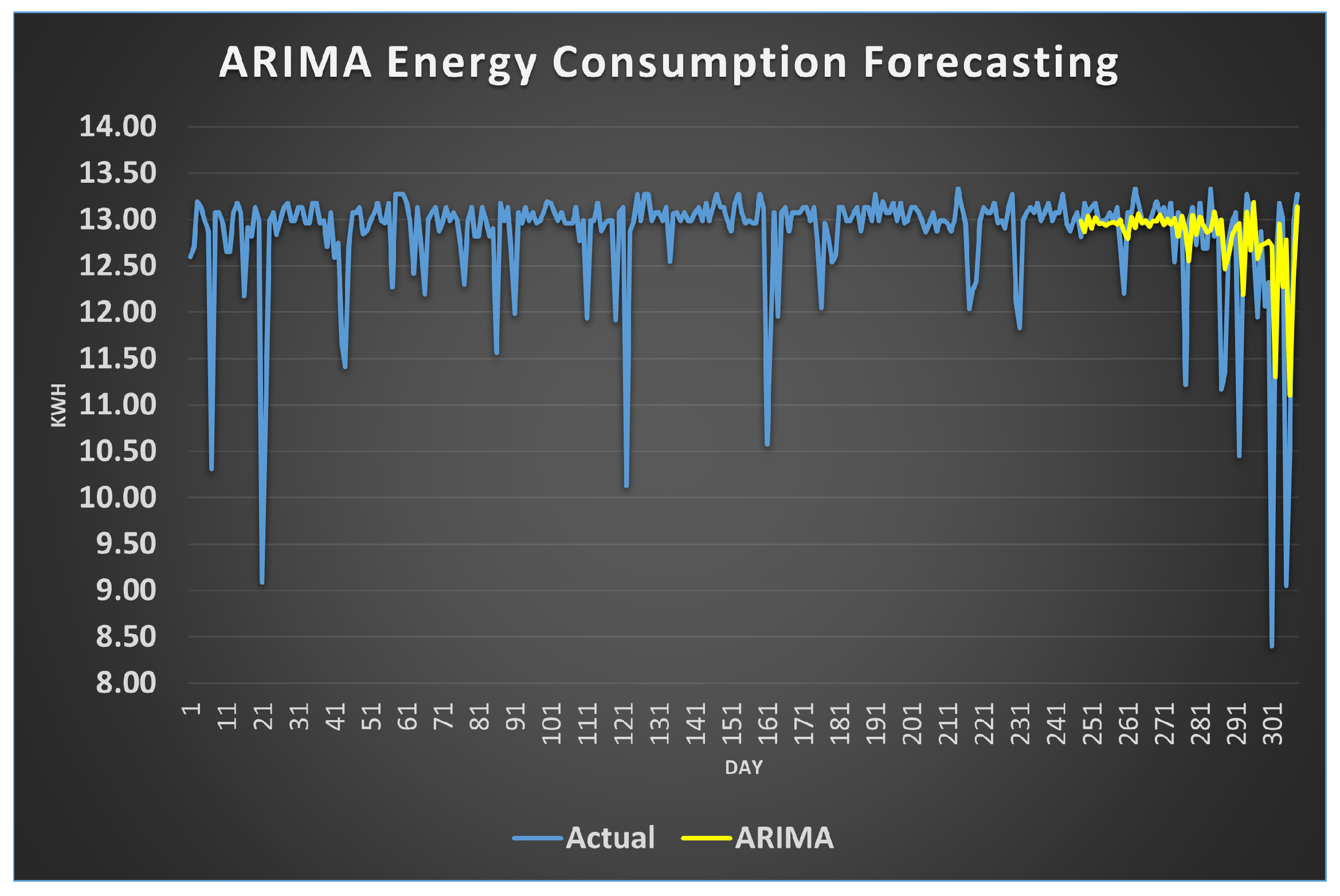
5.1. ARIMA Model Performance
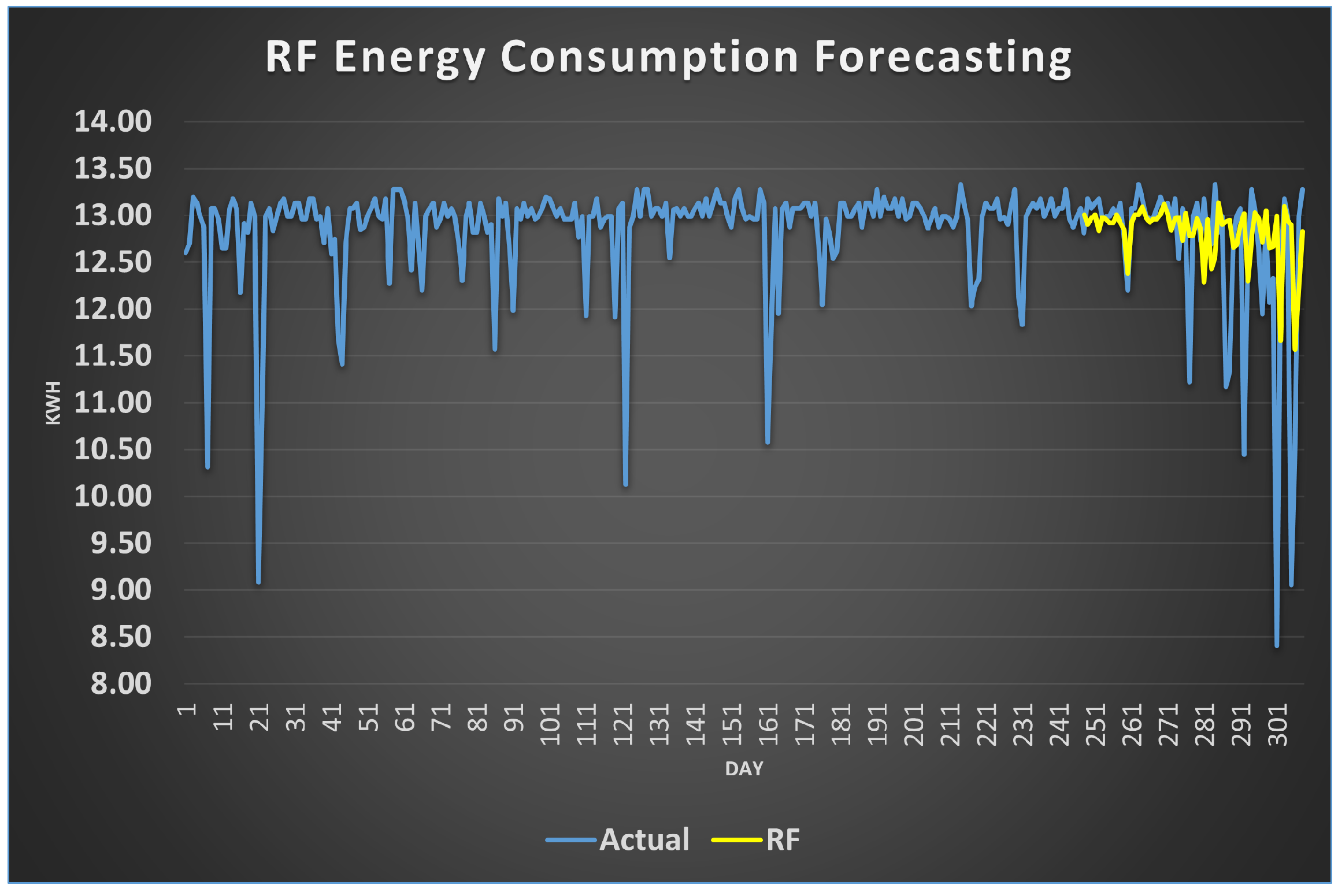
5.2. RF Model Performance
5.3. LSTM Model Performance
5.4. Model Comparison
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Muthukumar, M.; Rengarajan, N.; Velliyangiri, B.; Omprakas, M.; Rohit, C.; Raja, U.K. The development of fuel cell electric vehicles—A review. Mater. Today Proc. 2021, 45, 1181–1187. [Google Scholar] [CrossRef]
- Parikh, A.; Shah, M.; Prajapati, M. Fuelling the sustainable future: A comparative analysis between battery electrical vehicles (BEV) and fuel cell electrical vehicles (FCEV). Environ. Sci. Pollut. Res. 2023, 30, 57236–57252. [Google Scholar] [CrossRef] [PubMed]
- U.S. Department of Energy. Hydrogen’s Role in Transportation. 2022. Available online: https://www.energy.gov/eere/vehicles/articles/hydrogens-role-transportation#:~:text=Hydrogen%20fuel%20allows%20vehicles%20to,of%20miles%20at%20a%20time (accessed on 14 May 2024).
- Acar, C.; Dincer, I. The potential role of hydrogen as a sustainable transportation fuel to combat global warming. Int. J. Hydrogen Energy 2020, 45, 3396–3406. [Google Scholar] [CrossRef]
- Polymeni, S.; Skoutas, D.N.; Sarigiannidis, P.; Kormentzas, G.; Skianis, C. Smart Agriculture and Greenhouse Gas Emission Mitigation: A 6G-IoT Perspective. Electronics 2024, 13, 1480. [Google Scholar] [CrossRef]
- Dincer, I.; Acar, C. Review and evaluation of hydrogen production methods for better sustainability. Int. J. Hydrogen Energy 2015, 40, 11094–11111. [Google Scholar] [CrossRef]
- Asif, U.; Schmidt, K. Fuel cell electric vehicles (FCEV): Policy advances to enhance commercial success. Sustainability 2021, 13, 5149. [Google Scholar] [CrossRef]
- Maggio, G.; Nicita, A.; Squadrito, G. How the hydrogen production from RES could change energy and fuel markets: A review of recent literature. Int. J. Hydrogen Energy 2019, 44, 11371–11384. [Google Scholar] [CrossRef]
- Wong, E.Y.C.; Ho, D.C.K.; So, S.; Tsang, C.W.; Chan, E.M.H. Life cycle assessment of electric vehicles and hydrogen fuel cell vehicles using the greet model—A comparative study. Sustainability 2021, 13, 4872. [Google Scholar] [CrossRef]
- Dulău, L.I. CO2 Emissions of Battery Electric Vehicles and Hydrogen Fuel Cell Vehicles. Clean Technol. 2023, 5, 696–712. [Google Scholar] [CrossRef]
- Álvarez Coomonte, A.; Grande Andrade, Z.; Porras Soriano, R.; Lozano Galant, J.A. Review of the Planning and Distribution Methodologies to Locate Hydrogen Infrastructure in the Territory. Energies 2024, 17, 240. [Google Scholar] [CrossRef]
- Samsun, R.C.; Rex, M.; Antoni, L.; Stolten, D. Deployment of fuel cell vehicles and hydrogen refueling station infrastructure: A global overview and perspectives. Energies 2022, 15, 4975. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Assessment of Technologies for Improving Light-Duty Vehicle Fuel Economy—2025–2035; The National Academies Press: Washington, DC, USA, 2021. [Google Scholar] [CrossRef]
- Hua, Z.; Zheng, Z.; Pahon, E.; Péra, M.C.; Gao, F. A review on lifetime prediction of proton exchange membrane fuel cells system. J. Power Sources 2022, 529, 231256. [Google Scholar] [CrossRef]
- Darwish, A.; Elgenedy, M.A.; Williams, B.W. A review of modular electrical sub-systems of electric vehicles. Energies 2024, 17, 3474. [Google Scholar] [CrossRef]
- Dericioglu, C.; YiriK, E.; Unal, E.; Cuma, M.U.; Onur, B.; Tumay, M. A review of charging technologies for commercial electric vehicles. Int. J. Adv. Automot. Technol. 2018, 2, 61–70. [Google Scholar]
- Sorlei, I.S.; Bizon, N.; Thounthong, P.; Varlam, M.; Carcadea, E.; Culcer, M.; Iliescu, M.; Raceanu, M. Fuel cell electric vehicles—A brief review of current topologies and energy management strategies. Energies 2021, 14, 252. [Google Scholar] [CrossRef]
- Capurso, T.; Stefanizzi, M.; Torresi, M.; Camporeale, S. Perspective of the role of hydrogen in the 21st century energy transition. Energy Convers. Manag. 2022, 251, 114898. [Google Scholar] [CrossRef]
- Roslan, M.F.; Abd Rahman, H.; Abd Karim, R.; Osman, S.H. Advancements in Fuel Cell Technology for Electric Vehicles. Malays. J. Invent. Innov. 2024, 3, 11–20. [Google Scholar]
- European Commission. COPERNIC: COst and PERformaNces Improvement for CGH2 Composite Tanks. 2017. Available online: https://cordis.europa.eu/project/id/325330/reporting (accessed on 22 August 2024).
- Oladosu, T.L.; Pasupuleti, J.; Kiong, T.S.; Koh, S.P.J.; Yusaf, T. Energy management strategies, control systems, and artificial intelligence-based algorithms development for hydrogen fuel cell-powered vehicles: A review. Int. J. Hydrogen Energy 2024, 61, 1380–1404. [Google Scholar] [CrossRef]
- Sun, J.; Peng, Y.; Lu, D.; Chen, X.; Xu, W.; Weng, L.; Wu, J. Optimized configuration and operating plan for hydrogen refueling station with on-site electrolytic production. Energies 2022, 15, 2348. [Google Scholar] [CrossRef]
- Yan, M.; Peng, S.E.; Lai, C.S.; Chen, S.Z.; Liu, J.; Xu, J.; Xu, F.; Lai, L.L.; Chen, G. Two-Layer Optimization Planning Model for Integrated Energy Systems in Hydrogen Refueling Original Station. Sustainability 2023, 15, 7941. [Google Scholar] [CrossRef]
- Yang, W.; Dong, J.; Ren, Y. Hydrogen Safety Prediction and Analysis of Hydrogen Refueling Station Leakage Accidents and Process Using Multi-Relevance Machine Learning. World Electr. Veh. J. 2021, 12, 185. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, H.; Li, D.; Zhang, G. Smart online charging algorithm for electric vehicles via customized actor-critic learning. IEEE Internet Things J. 2021, 9, 684–694. [Google Scholar] [CrossRef]
- Hirz, M.; Lippitsch, S. Automated Charging of Electric Cars for Improving User Experience and Charging Infrastructure Utilization. In Proceedings of the AHFE 2023 Conference Proceedings Edited Books: Applied Human Factors and Ergonomics International, San Francisco, CA, USA, 20–24 July 2023. [Google Scholar]
- Zhang, W.; Liu, H.; Wang, F.; Xu, T.; Xin, H.; Dou, D.; Xiong, H. Intelligent electric vehicle charging recommendation based on multi-agent reinforcement learning. In Proceedings of the Web Conference 2021, Ljubljana, Slovenia, 19–23 April 2021; pp. 1856–1867. [Google Scholar]
- Liu, S.; Xia, X.; Cao, Y.; Ni, Q.; Zhang, X.; Xu, L. Reservation-based EV charging recommendation concerning charging urgency policy. Sustain. Cities Soc. 2021, 74, 103150. [Google Scholar] [CrossRef]
- Chellaswamy, C.; Balaji, L.; Kaliraja, T. Renewable energy based automatic recharging mechanism for full electric vehicle. Eng. Sci. Technol. Int. J. 2020, 23, 555–564. [Google Scholar] [CrossRef]
- Palani, G.; Sengamalai, U. A critical review on inductive wireless power transfer charging system in electric vehicle. Energy Storage 2023, 5, e407. [Google Scholar] [CrossRef]
- Tian, Z.; Jung, T.; Wang, Y.; Zhang, F.; Tu, L.; Xu, C.; Tian, C.; Li, X.Y. Real-time charging station recommendation system for electric-vehicle taxis. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3098–3109. [Google Scholar] [CrossRef]
- Suanpang, P.; Jamjuntr, P. Optimizing Electric Vehicle Charging Recommendation in Smart Cities: A Multi-Agent Reinforcement Learning Approach. World Electr. Veh. J. 2024, 15, 67. [Google Scholar] [CrossRef]
- Brooker, A.; Gonder, J.; Wang, L.; Wood, E.; Lopp, S.; Ramroth, L. FASTSim: A Model to Estimate Vehicle Efficiency, Cost and Performance; Technical Report, SAE Technical Paper; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- Banerjee, N.; Morton, A.; Akartunalı, K. Passenger demand forecasting in scheduled transportation. Eur. J. Oper. Res. 2020, 286, 797–810. [Google Scholar] [CrossRef]
- Zambrano, J.L.; Calafate, C.T.; Soler, D.; Cano, J.C.; Manzoni, P. Using real traffic data for its simulation: Procedure and validation. In Proceedings of the 2016 Intl IEEE Conferences on Ubiquitous Intelligence & Computing, Advanced and Trusted Computing, Scalable Computing and Communications, Cloud and Big Data Computing, Internet of People, and Smart World Congress (UIC/ATC/ScalCom/CBDCom/IoP/SmartWorld), Toulouse, France, 18–21 July 2016; pp. 161–170. [Google Scholar]
- Hamza, K.; Chu, K.C.; Favetti, M.; Benoliel, P.K.; Karanam, V.; Laberteaux, K.P.; Tal, G. Comparisons of Real-World Vehicle Energy Efficiency with Dynamometer-Based Ratings and Simulation Models. World Electr. Veh. J. 2021, 12, 161. [Google Scholar] [CrossRef]
- Vatanparvar, K.; Faezi, S.; Burago, I.; Levorato, M.; Al Faruque, M.A. Extended range electric vehicle with driving behavior estimation in energy management. IEEE Trans. Smart Grid 2018, 10, 2959–2968. [Google Scholar] [CrossRef]
- Neubauer, J.; Wood, E. Thru-life impacts of driver aggression, climate, cabin thermal management, and battery thermal management on battery electric vehicle utility. J. Power Sources 2014, 259, 262–275. [Google Scholar] [CrossRef]
- Ozturk, S.; Ozturk, F. Forecasting energy consumption of Turkey by Arima model. J. Asian Sci. Res. 2018, 8, 52. [Google Scholar] [CrossRef]
- Chen, Y.T.; Piedad, E., Jr.; Kuo, C.C. Energy Consumption Load Forecasting Using a Level-Based Random Forest Classifier. Symmetry 2019, 11, 956. [Google Scholar] [CrossRef]
- Mahjoub, S.; Chrifi-Alaoui, L.; Marhic, B.; Delahoche, L. Predicting energy consumption using LSTM, multi-layer GRU and drop-GRU neural networks. Sensors 2022, 22, 4062. [Google Scholar] [CrossRef] [PubMed]
- Sherstinsky, A. Fundamentals of recurrent neural network (RNN) and long short-term memory (LSTM) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Spanos, G.; Angelis, L.; Toloudis, D. Assessment of vulnerability severity using text mining. In Proceedings of the 21st Pan-Hellenic conference on Informatics, Larissa, Greece, 28–30 September 2017; pp. 1–6. [Google Scholar]
- Spanos, G.; Angelis, L. A multi-target approach to estimate software vulnerability characteristics and severity scores. J. Syst. Softw. 2018, 146, 152–166. [Google Scholar] [CrossRef]
- Aivatoglou, G.; Anastasiadis, M.; Spanos, G.; Voulgaridis, A.; Votis, K.; Tzovaras, D.; Angelis, L. A RAkEL-based methodology to estimate software vulnerability characteristics & score-an application to EU project ECHO. Multimed. Tools Appl. 2022, 81, 9459–9479. [Google Scholar]
- Polymeni, S.; Spanos, G.; Tsiktsiris, D.; Athanasakis, E.; Votis, K.; Tzovaras, D.; Kormentzas, G. everWeather: A Low-Cost and Self-Powered AIoT Weather Forecasting Station for Remote Areas. In Advances and New Trends in Environmental Informatics; Wohlgemuth, V., Kranzlmüller, D., Höb, M., Eds.; Springer: Cham, Switzerland, 2023; pp. 141–158. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. Statistical Learning. In An Introduction to Statistical Learning; Springer: New York, NY, USA, 2021; pp. 15–57. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Year | Main Focus | EV Category | AI Integration |
|---|---|---|---|---|
| Tian et al. [31] | 2016 | Dynamic Wireless Charging | BEV | Full |
| Chellaswamy et al. [29] | 2020 | Renewable Energy for Charging | N/A | N/A |
| Cao et al. [25] | 2021 | EV Charging System Optimization | BEV | Full |
| Liu et al. [28] | 2021 | Renewable Energy for Charging | BEV | Partial |
| Yang et al. [24] | 2021 | H2 Refueling Station Optimization | N/A | Partial |
| Zhang et al. [27] | 2021 | EV Charging System Optimization | EV | Full |
| Sun et al. [22] | 2022 | H2 Refueling Station Optimization | N/A | Partial |
| Hirz and Lippitsch [26] | 2023 | EV Charging System Optimization | BEV | Partial |
| Palani and Sengamalai [30] | 2023 | Dynamic Wireless Charging | BEV | N/A |
| Yan et al. [23] | 2023 | H2 Refueling Station Optimization | N/A | N/A |
| Suanpang and Jamjuntr [32] | 2024 | Dynamic Wireless Charging | BEV | Full |
| Proposed Service | 2024 | H2 Vehicle Refueling Automation | FCEV | Full |
| Dataset | Size (MB) | Duration (Days) | Time Frame (Hours) | Sampling Time (Seconds) | Samples |
|---|---|---|---|---|---|
| Bookings | 0.506 | 22 | 14 | – | 1074 |
| Traffic | 0.440 | 30 | 24 | 1800 | 14,376 |
| Bookings-II | 0.393 | 22 | 14 | – | 840 |
| Traffic-II | 26.751 | 22 | 14 | 1 | 1,108,800 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Polymeni, S.; Pitsiavas, V.; Spanos, G.; Matthewson, Q.; Lalas, A.; Votis, K.; Tzovaras, D. Toward Sustainable Mobility: AI-Enabled Automated Refueling for Fuel Cell Electric Vehicles. Energies 2024, 17, 4324. https://doi.org/10.3390/en17174324
Polymeni S, Pitsiavas V, Spanos G, Matthewson Q, Lalas A, Votis K, Tzovaras D. Toward Sustainable Mobility: AI-Enabled Automated Refueling for Fuel Cell Electric Vehicles. Energies. 2024; 17(17):4324. https://doi.org/10.3390/en17174324
Chicago/Turabian StylePolymeni, Sofia, Vasileios Pitsiavas, Georgios Spanos, Quentin Matthewson, Antonios Lalas, Konstantinos Votis, and Dimitrios Tzovaras. 2024. "Toward Sustainable Mobility: AI-Enabled Automated Refueling for Fuel Cell Electric Vehicles" Energies 17, no. 17: 4324. https://doi.org/10.3390/en17174324
APA StylePolymeni, S., Pitsiavas, V., Spanos, G., Matthewson, Q., Lalas, A., Votis, K., & Tzovaras, D. (2024). Toward Sustainable Mobility: AI-Enabled Automated Refueling for Fuel Cell Electric Vehicles. Energies, 17(17), 4324. https://doi.org/10.3390/en17174324