
Fractional Order PID Optimal Control Method of Regional Load Frequency Containing Pumped Storage Plants

Abstract
:1. Introduction
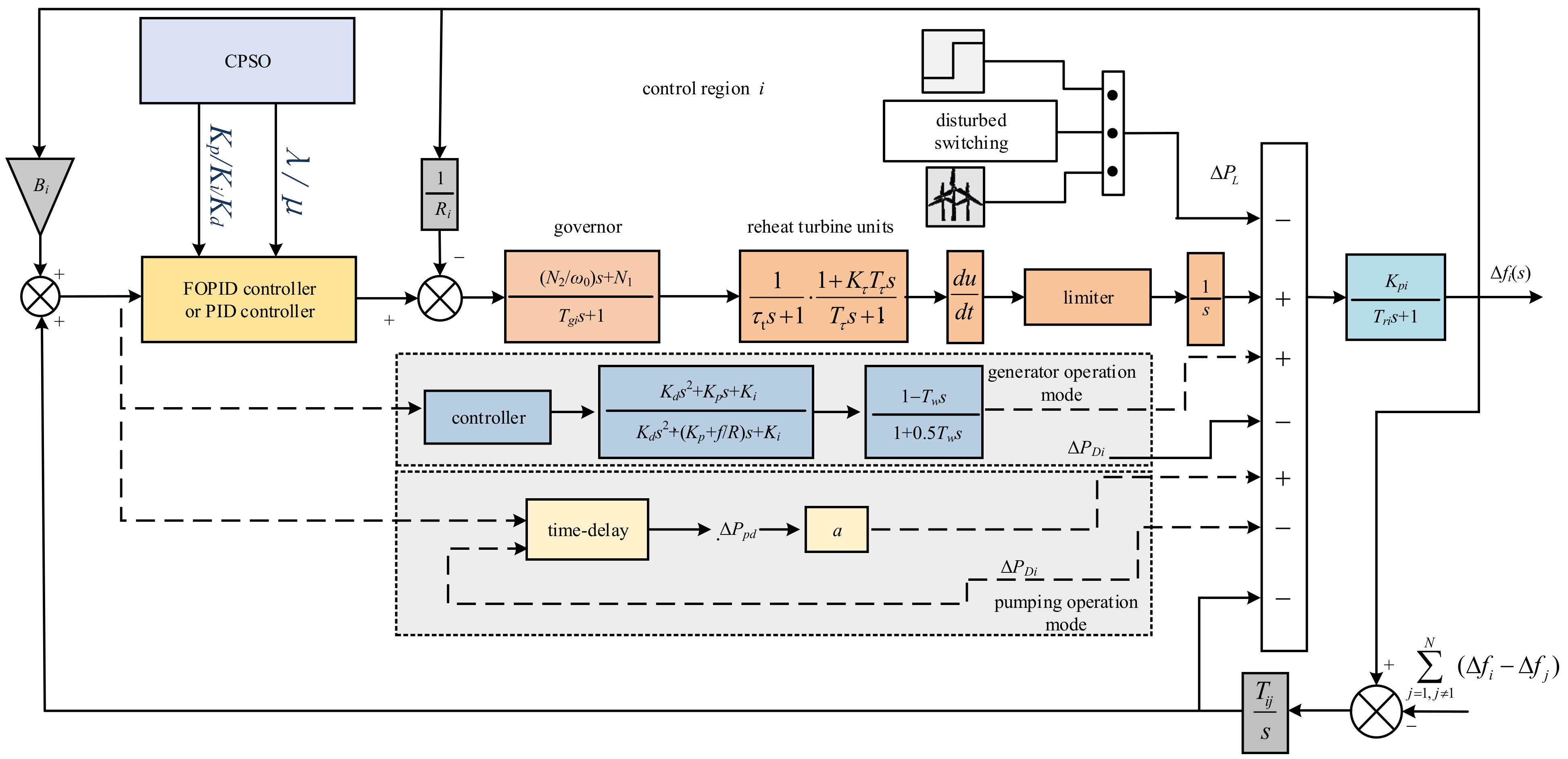
2. Modeling of the Pumped Storage Plant Regulation System
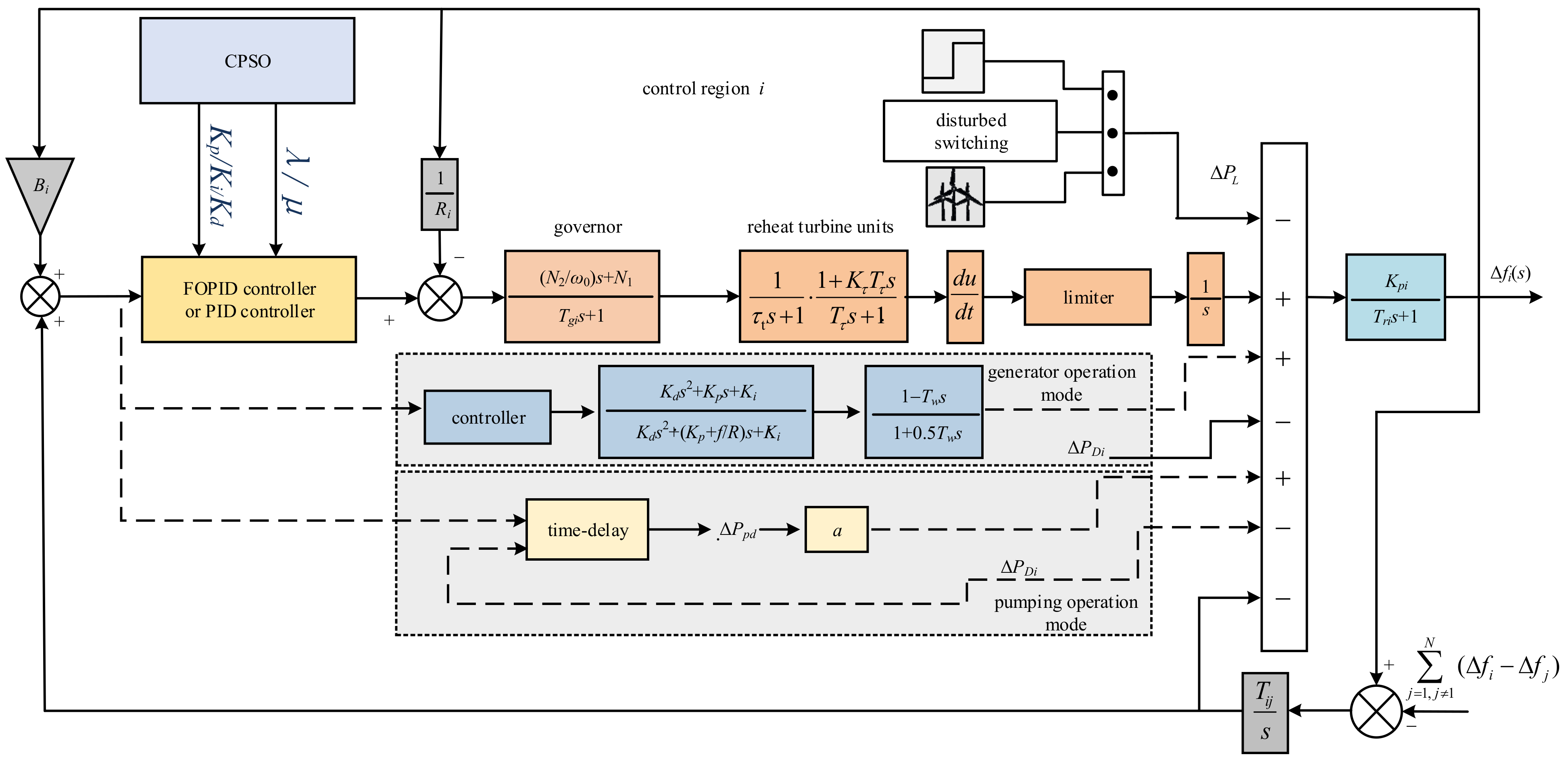
2.1. Control Architecture
2.2. Models of Units
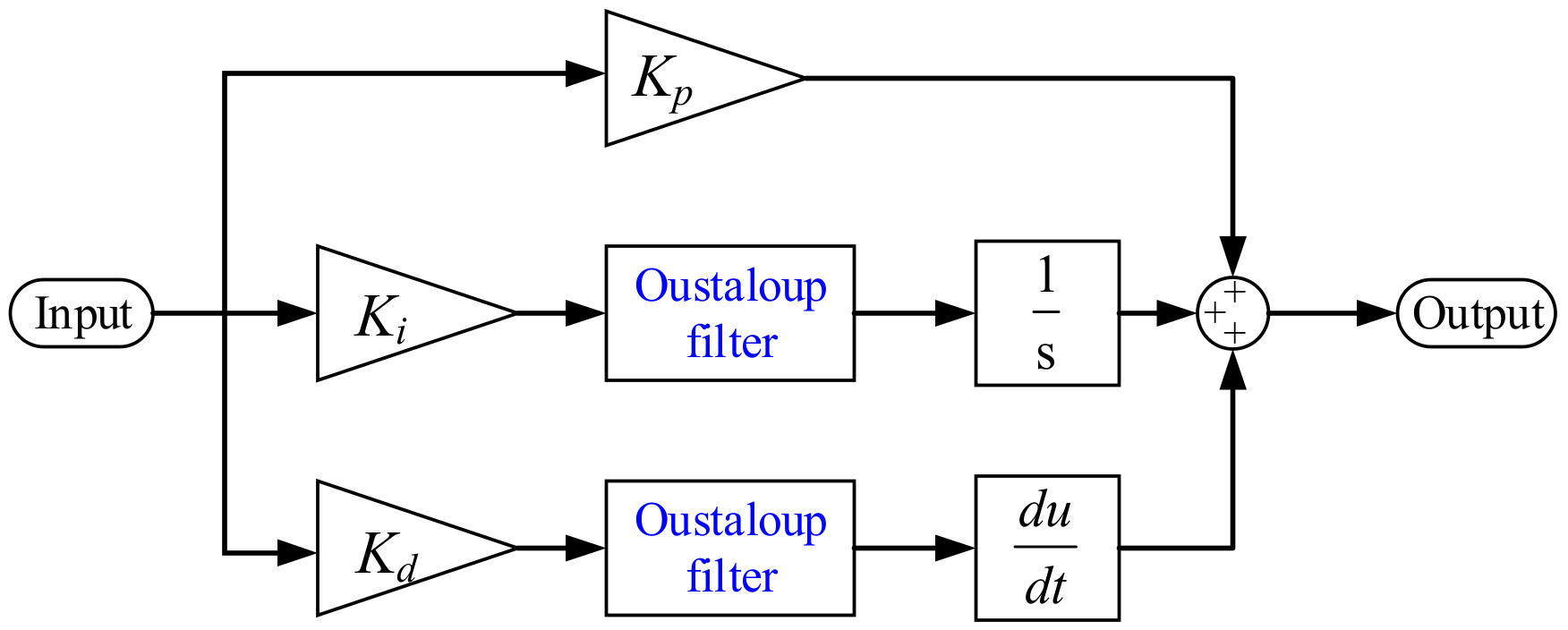
3. Fractional Order PID Controller
4. Algorithm Design
4.1. Basic Principle of CPSO Algorithm
- (1)
- By Equation (13), xgbest is mapped to the domain of the logistic equation [0, 1];
- (2)
- Use Equation (14) to iterate for M times and gain chaotic sequences , , …, ;
- (3)
- According to Equation (15), the chaotic sequence is mapped back to the original solution space and attains the feasible solution sequences , , …, ;
- (4)
- The optimal solution after chaos optimization is obtained by running the two-region load control model, where ;
- (5)
- Randomly substitute the optimal particle swarm in the chaotic sequence for any particle swarm in the current particle swarm;
- (6)
- Update the fitness value. If , then , ;
4.2. Design of Fitness Function
5. Simulation Analysis
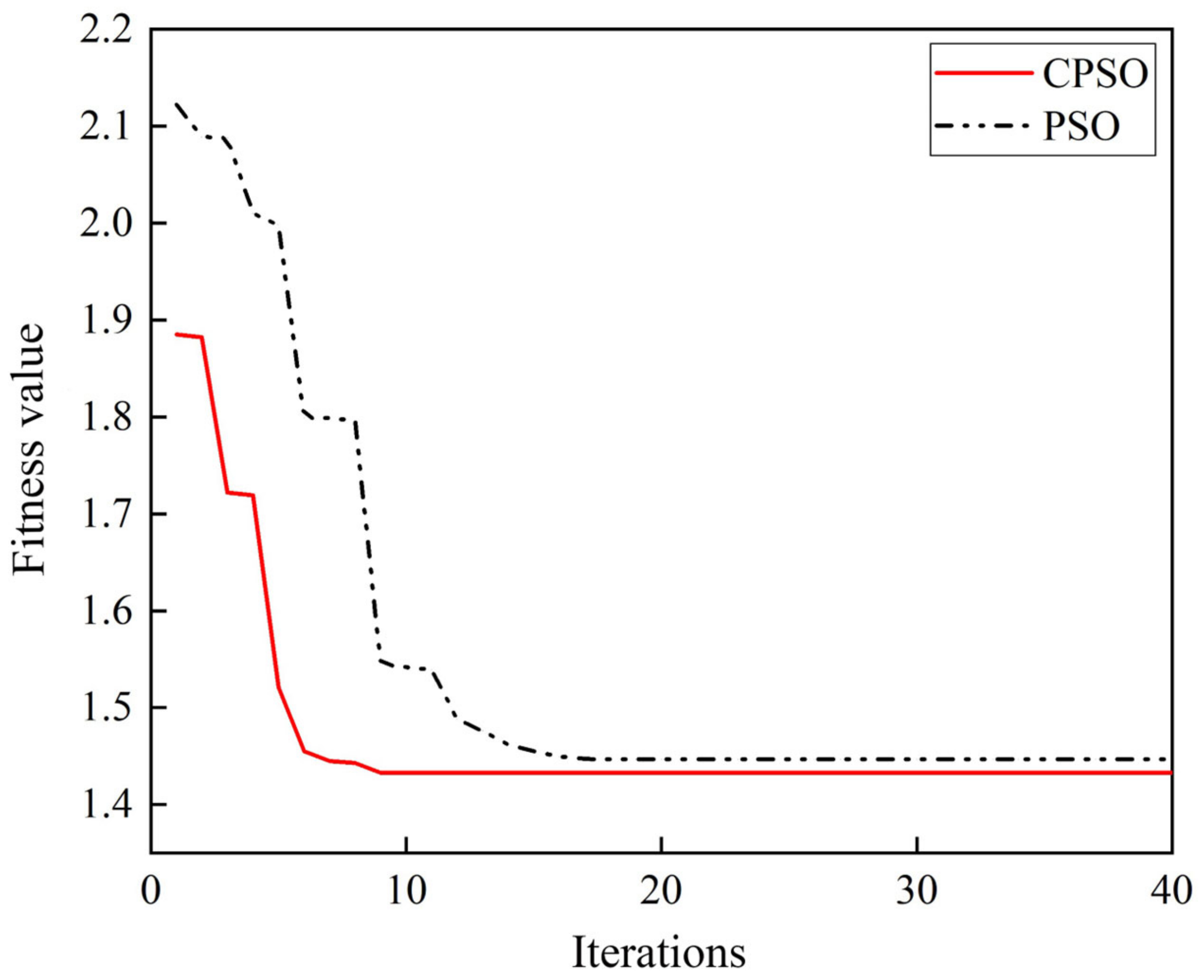
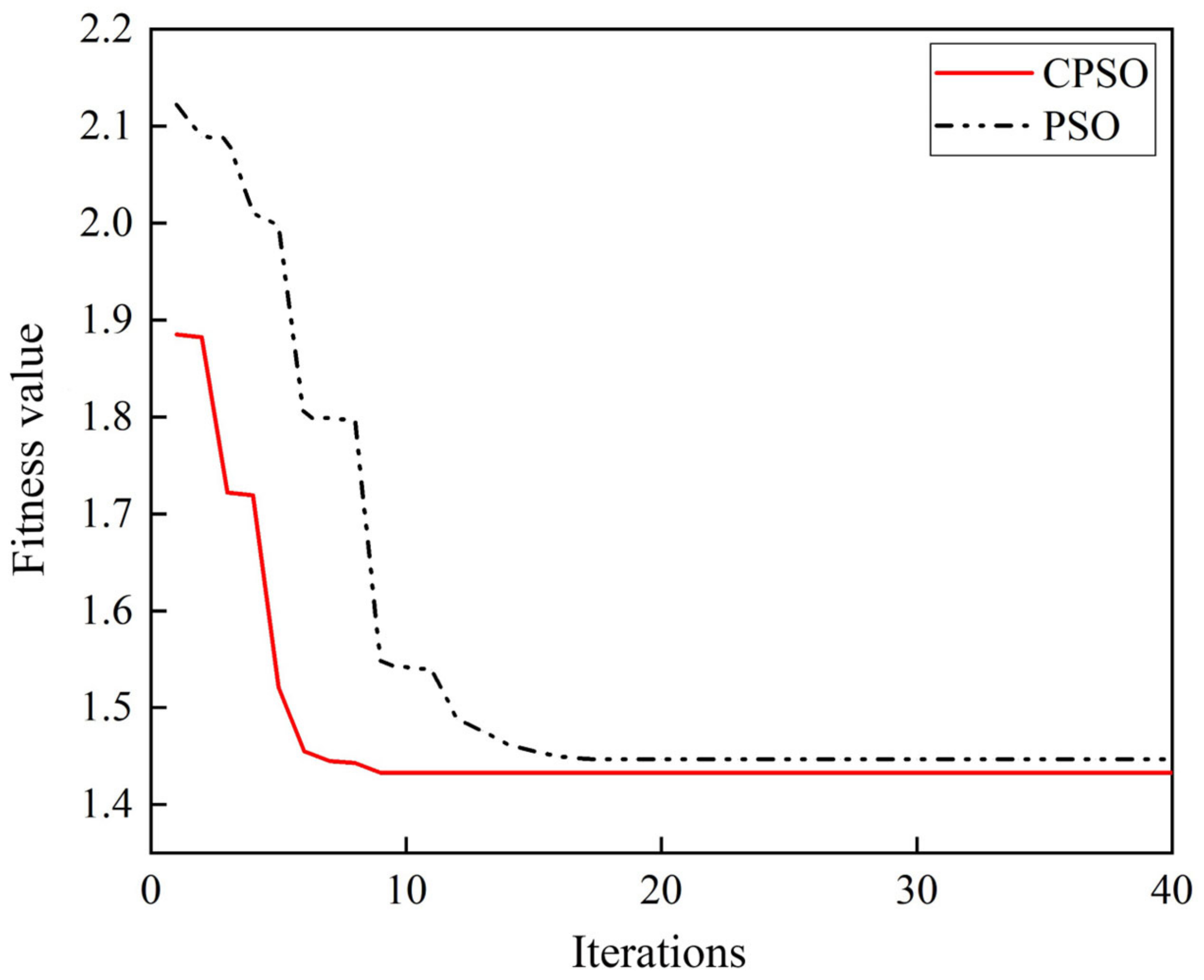
5.1. Comparative Analysis of Optimization Algorithms
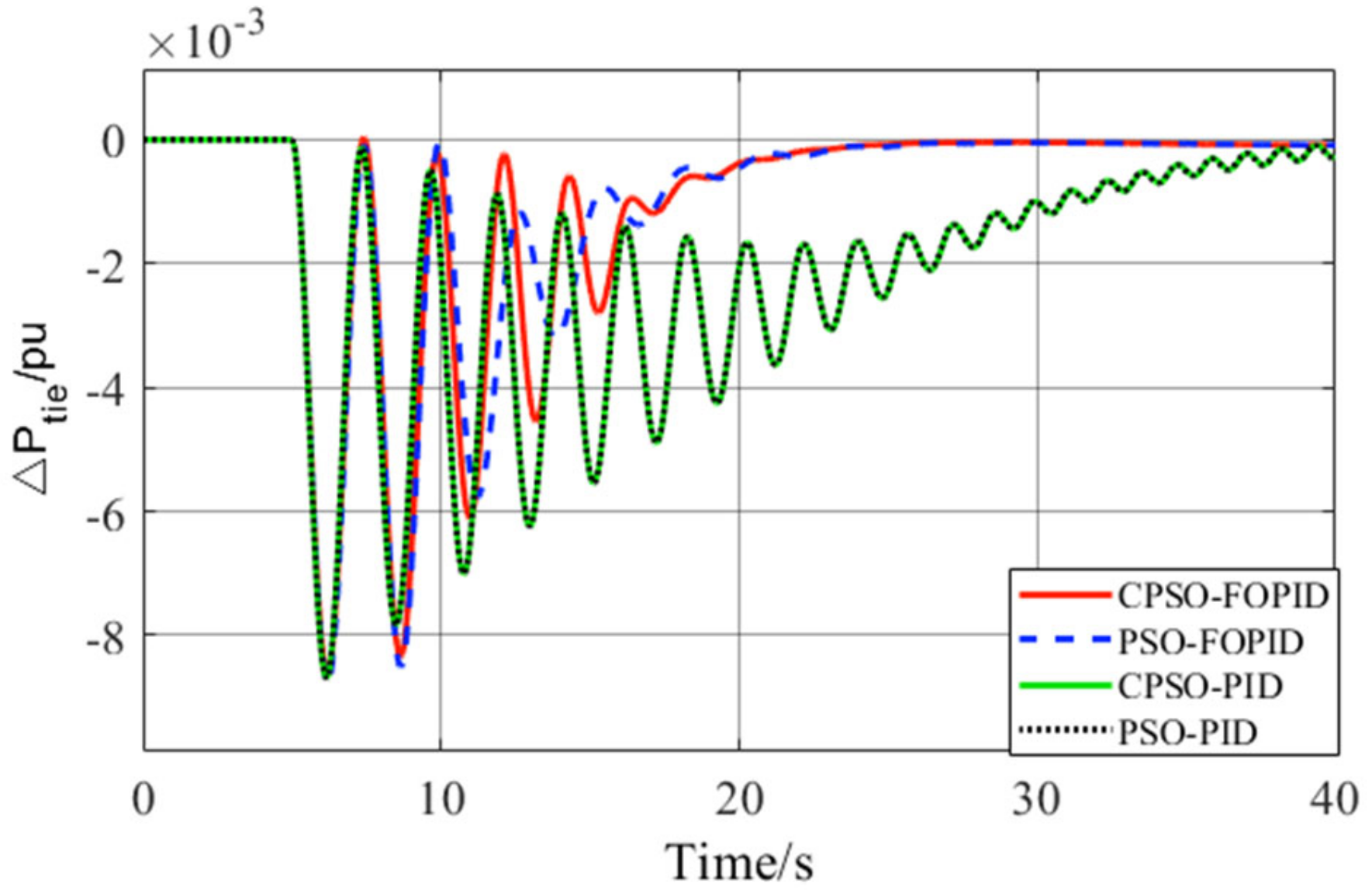
5.2. Comparison of the Controller’s Performance
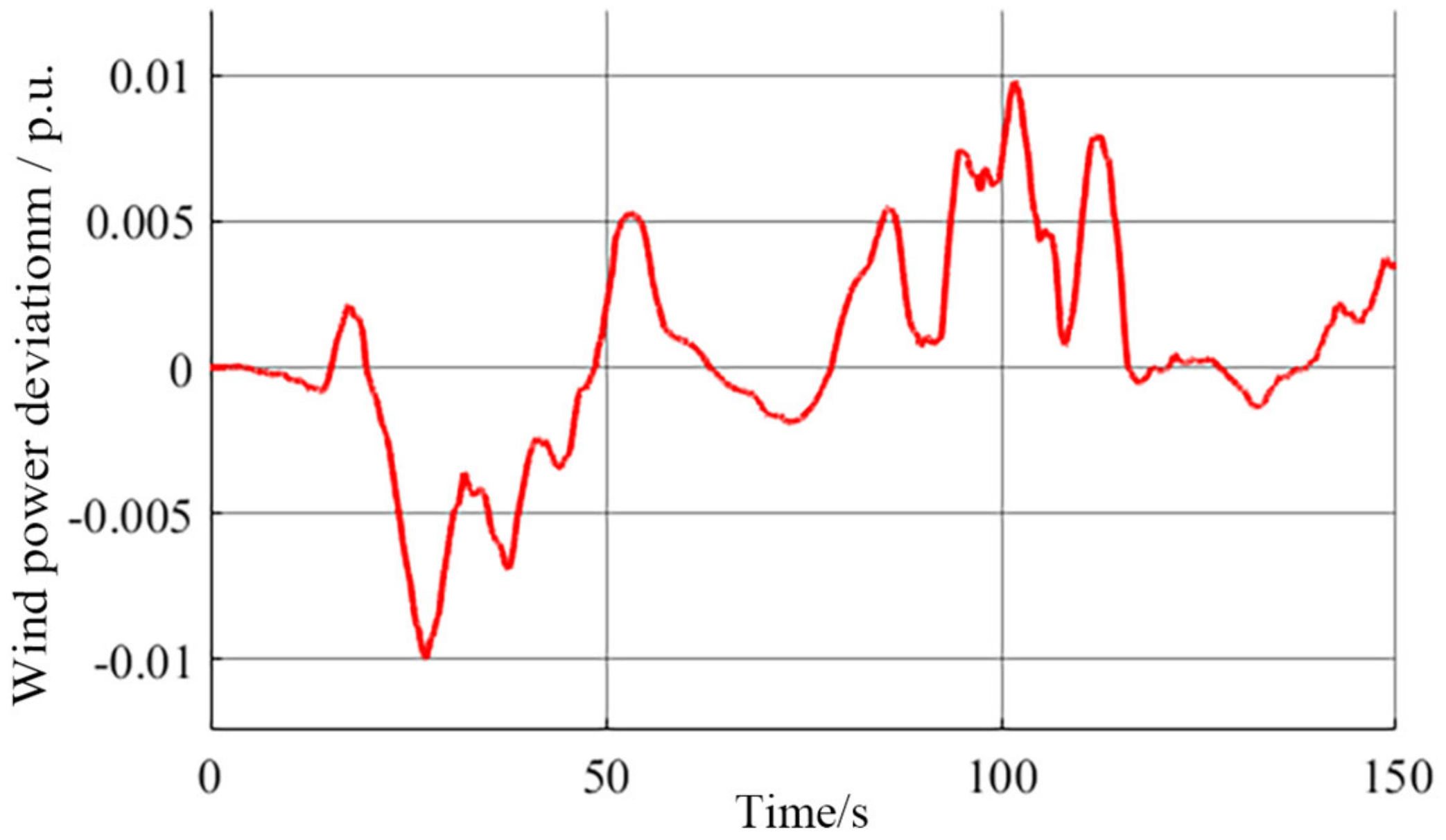
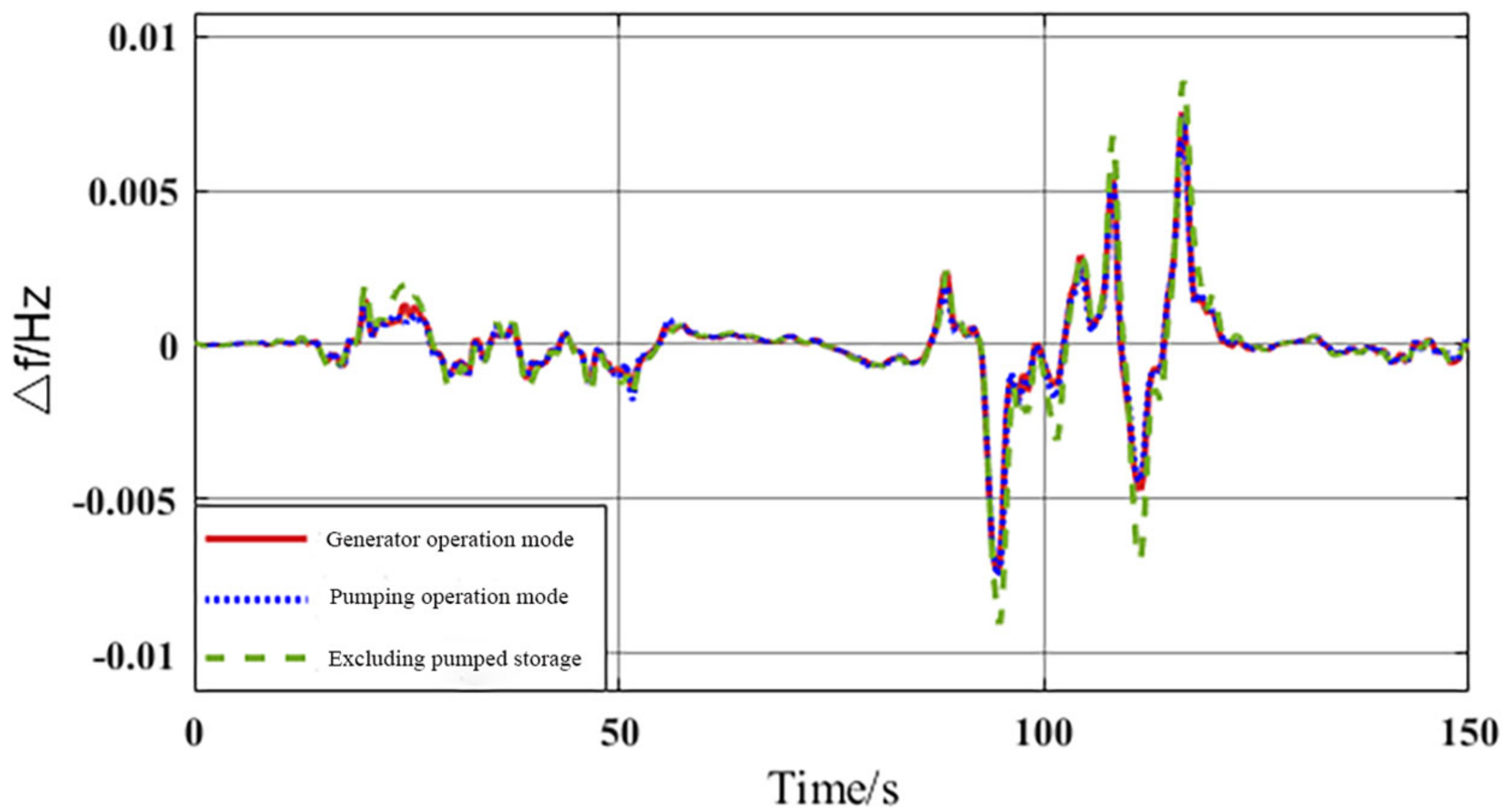
5.3. Pumped Storage Power Station Participation
6. Conclusions
- (1)
- Based on the theory of fractional calculus, a FOPID controller is designed. The performance of the controller in the region model is compared and analyzed under different disturbances. The results show that the FOPID controller has better dynamic performance and can fully exert the frequency regulation potential of traditional units.
- (2)
- The CPSO algorithm is introduced to optimize the controller parameters, and the fitness function containing multiple performance indices is used as the optimization objective, which fully exerts the control performance of the controller and enhances the robustness of the system.
- (3)
- The simulation results under the generator operation mode and pumping operation mode indicates that the FOPID controller optimized by CPSO can effectively stabilize the grid frequency fluctuation caused by different disturbances, which has a certain guiding significance for the study of the grid frequency control.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Y.; Zhuo, Y.; Liu, Y.; Guan, L.; Lu, C.; Xiao, L. Development and Recommendation of Fast Frequency Response Market for Power System with High Proportion of Renewable Energy. Autom. Electr. Power Syst. 2021, 45, 174–183. [Google Scholar]
- Chang, Y.; Liu, R.; Ba, Y.; Wang, H.; Lu, Q.; Li, W. Frequency Control Mode and Performance Assessment in UHV Grid with High Proportion of Renewable Energy Resources. Power Syst. Technol. 2019, 43, 43621–43629. [Google Scholar]
- Chen, G.; Dong, Y.; Liang, Z. Analysis and Reflection on High-quality Development of New Energy with Chinese Characteristics in Energy Transition. Proc. Chin. Soc. Electr. Eng. 2020, 40, 5493–5505. [Google Scholar]
- Merayo, N.; Juarez, D.; Aguado, J.C.; de Miguel, I.; Duran, R.J.; Fernandez, P.; Lorenzo, R.M.; Abril, E.J. PID Controller Based on a Self-Adaptive Neural Network to Ensure QoS Bandwidth Requirements in Passive Optical Networks. J. Opt. Commun. Netw. 2017, 9, 433–445. [Google Scholar] [CrossRef]
- Wen, Y.; Yang, W.; Lin, X. Review and prospect of frequency stability analysis and control of low-inertia power systems. Electr. Power Autom. Equip. 2020, 40, 211–222. [Google Scholar]
- Shayeghi, H.; Shayanfar, H.; Jalili, A. Load frequency control strategies: A state-of-the-art survey for the researcher. Energy Convers. Manag. 2009, 50, 344–353. [Google Scholar] [CrossRef]
- Xiahou, K.; Liu, Y.; Wu, Q. Robust load frequency control of power systems against random time-delay attacks. IEEE Trans. Smart Grid 2020, 12, 909–911. [Google Scholar] [CrossRef]
- Yan, Z.; Xu, Y. Data-driven load frequency control for stochastic power systems: A deep reinforcement learning method with continuous action search. IEEE Trans. Power Syst. 2018, 34, 1653–1656. [Google Scholar] [CrossRef]
- Tian, E.; Peng, C. Memory-based event-triggering H∞ load frequency control for power systems under deception attacks. IEEE Trans. Cybern. 2020, 50, 4610–4618. [Google Scholar] [CrossRef]
- Guo, H.; Wang, X. Improved Load Frequency Sliding Mode Control for Multi-area Interconnected Power Systems. Control Eng. China 2021, 28, 944–948. [Google Scholar]
- Kocaarslan, I.; Cam, E. Fuzzy logic controller in interconnected electrical power systems for load-frequency control. Int. J. Electr. Power Energy Syst. 2005, 27, 542–549. [Google Scholar] [CrossRef]
- Bao, X.; Gao, F.; Gu, L.; He, X.; Cai, Y. Area Load Frequency Control with Pumped Storage Power Station. J. Shanghai Jiaotong Univ. 2015, 49, 1701–1705. [Google Scholar]
- Sondhi, S.; Hote, Y.V. Fractional order PID controller for load frequency control. Energy Convers. Manag. 2014, 85, 343–353. [Google Scholar] [CrossRef]
- Shan, H.; He, J.; Fan, L.; Gao, C.; Mei, R.; Luo, Z. Research on Fractional Order PID Control of Regional Load Frequency of Pumped Storage Power Station. Power Syst. Technol. 2020, 44, 1410–1418. [Google Scholar]
- Abdulkhader, H.K.; Jacob, J.; Mathew, A.T. Robust type-2 fuzzy fractional order PID controller for dynamic stability enhancement of power system having RES based microgrid penetration. Int. J. Electr. Power Energy Syst. 2019, 110, 357–371. [Google Scholar] [CrossRef]
- Kumar, A.; Pan, S. Design of fractional order PID controller for load frequency control system with communication delay. ISA Trans. 2022, 129, 138–149. [Google Scholar] [CrossRef]
- Mughees, A.; Mohsin, S.A. Design and control of magnetic levitation system by optimizing fractional order PID controller using ant colony optimization algorithm. IEEE Access 2020, 8, 116704–116723. [Google Scholar] [CrossRef]
- Abumeteir, H.A.; Vural, A.M. Design and Optimization of Fractional Order PID Controller to Enhance Energy Storage System Contribution for Damping Low-Frequency Oscillation in Power Systems Integrated with High Penetration of Renewable Sources. Sustainability 2022, 14, 5095. [Google Scholar] [CrossRef]
- Han, Z.; Qi, H.; Wang, L.; Menhas, M.I.; Fei, M. Water level control of nuclear power plant steam generator based on intelligent virtual reference feedback tuning. In Advances in Green Energy Systems and Smart Grid; Springer: Singapore, 2018; pp. 14–23. [Google Scholar]
- Wen, Y.; Wang, L.; Peng, W.; Menhas, M.I.; Qian, L. Application of intelligent virtual reference feedback tuning to temperature control in a heat exchanger. In Intelligent Computing and Internet of Things; Springer: Singapore, 2018; pp. 311–320. [Google Scholar]
- Liu, X. Optimization design on fractional order PID controller based on adaptive particle swarm optimization algorithm. Nonlinear Dyn. 2016, 84, 379–386. [Google Scholar] [CrossRef]
- Yang, Y.; Xiang, L.; Guo, X.; Zheng, Y. Active Disturbance Rejection Controller Optimization of Load Frequency in Interconnected Power Grid with Pumped Storage Power Station. Power Syst. Technol. 2021, 45, 276–283. [Google Scholar]
- Shah, R.; Khan, H.; Farooq, U.; Baleanu, D.; Kumam, P.; Arif, M. A New Analytical Technique to Solve System of Fractional-Order Partial Differential Equations. IEEE Access 2019, 7, 150037–150050. [Google Scholar] [CrossRef]
- Yang, J.; Yao, H.; Shi, G. Analysis of DC-side Voltage Control of Shunt Active Power Filter. Proc. CSU-EPSA 2018, 30, 69–74. [Google Scholar]
- Liu, L.; Pan, F.; Xue, D. A Fractional-Order Kalman Filter. J. Northeast Univ. Nat. Sci. 2014, 35, 1069–1072. [Google Scholar]
- Dingyu, X.U.E.; Chunna, Z. Fractional order PID controller design for fractional order system. Control Theory Appl. 2007, 24, 771–776. [Google Scholar]
- Qi, Z.; Shi, Q.; Zhang, H. Tuning of Digital PID Controllers Using Particle Swarm Optimization Algorithm for a CAN-Based DC Motor Subject to Stochastic Delays. IEEE Trans. Ind. Electron. 2020, 67, 5637–5646. [Google Scholar] [CrossRef]
- Liu, K.; Gou, J.; Luo, Z.; Wang, K.; Xu, X.; Zhao, Y. Prediction of Dissolved Gas Concentration in Transformer Oil Based on PSO-LSTM Model. Power Syst. Technol. 2020, 44, 2778–2784. [Google Scholar]
- Ai, X.; Li, Y.; Wang, K.; Hu, J. Locating and sizing of electric vehicle charging station based on chaotic simulated annealing particle swarm optimization algorithm. Electr. Power Autom. Equip. 2018, 38, 9–14. [Google Scholar]
- Verma, B.; Padhy, P.K. Robust Fine Tuning of Optimal PID Controller with Guaranteed Robustness. IEEE Trans. Ind. Electron. 2020, 67, 4911–4920. [Google Scholar] [CrossRef]
- Yang, J.; Tang, F.; Liao, Q.; Zhu, X.; Yan, B. Microgrid economy and stability coordinated optimization considering randomness of renewable energy resource. Electr. Power Autom. Equip. 2017, 37, 179–184, 200. [Google Scholar]
- Xu, Y.; Zhou, J.; Xue, X.; Xia, X.; Pei, X.; Li, C. Fractional Order PID-based Regulation and Control of Pumped Storage Units Under No-load Condition. Autom. Electr. Power Syst. 2015, 39, 43–48. [Google Scholar]
- Padula, F.; Visioli, A. Tuning rules for optimal PID and fractional-order PID controllers. J. Process Control 2011, 21, 69–81. [Google Scholar] [CrossRef]
- Mu, G.; Cui, Y.; Yan, G. A Static Optimization Method to Determine Integrated Power Transmission Capacity of Clustering Wind Farms. Proc. Chin. Soc. Electr. Eng. 2011, 31, 15–19. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | c1 | c2 | ω | Size | Maximum Iterations |
|---|---|---|---|---|---|
| Value | 2 | 2 | 0.6 | 40 | 40 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| Tij | 0.545 p.u. | τt | 10 s | Tri | 20 s |
| αij | −1 p.u. | Kτ | 5 s | 4 | |
| βi | 0.425 p.u. MW/Hz | TW | 1 s | 1 | |
| Ri | 2.4 Hz/p.u. | Tg | 0.08 s | 5 | |
| Tτ | 0.3 s | Kpi | 120 s | PL_nom | 1000 MW |
| Algorithm | Controller | ||||||
|---|---|---|---|---|---|---|---|
| MIN | MAX | AVG | MIN | MAX | AVG | ||
| PSO | PID | 4.118 | 5.561 | 4.625 | 4.045 | 4.062 | 4.058 |
| FOPID | 2.122 | 5.004 | 3.237 | 1.447 | 1.906 | 1.488 | |
| CPSO | PID | 4.118 | 5.561 | 4.618 | 4.036 | 4.062 | 4.058 |
| FOPID | 1.885 | 3.609 | 2.655 | 1.433 | 1.499 | 1.463 | |
| Algorithm | Controller | Parameters | ||||
|---|---|---|---|---|---|---|
| Kp | Ki | Kd | μ | λ | ||
| PSO | PID | 67.8069 | 8.8716 | 14.4256 | - | - |
| FOPID | 49.0901 | 14.3847 | 13.5162 | 1.7108 | 0.9092 | |
| CPSO | PID | 49.5711 | 6.5176 | 10.5171 | - | - |
| FOPID | 198.98 | 50.1701 | 25.2283 | 1.6806 | 0.9156 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, X.; Yang, K.; Dong, X.; Jiang, X.; Liu, D.; Luo, Z. Fractional Order PID Optimal Control Method of Regional Load Frequency Containing Pumped Storage Plants. Energies 2023, 16, 1703. https://doi.org/10.3390/en16041703
Gong X, Yang K, Dong X, Jiang X, Liu D, Luo Z. Fractional Order PID Optimal Control Method of Regional Load Frequency Containing Pumped Storage Plants. Energies. 2023; 16(4):1703. https://doi.org/10.3390/en16041703
Chicago/Turabian StyleGong, Xundong, Kejun Yang, Xiaofeng Dong, Xuelei Jiang, Dewen Liu, and Zhao Luo. 2023. "Fractional Order PID Optimal Control Method of Regional Load Frequency Containing Pumped Storage Plants" Energies 16, no. 4: 1703. https://doi.org/10.3390/en16041703
APA StyleGong, X., Yang, K., Dong, X., Jiang, X., Liu, D., & Luo, Z. (2023). Fractional Order PID Optimal Control Method of Regional Load Frequency Containing Pumped Storage Plants. Energies, 16(4), 1703. https://doi.org/10.3390/en16041703