
Non-Centralised Balance Dispatch Strategy in Waked Wind Farms through a Graph Sparsification Partitioning Approach


Abstract
:1. Introduction
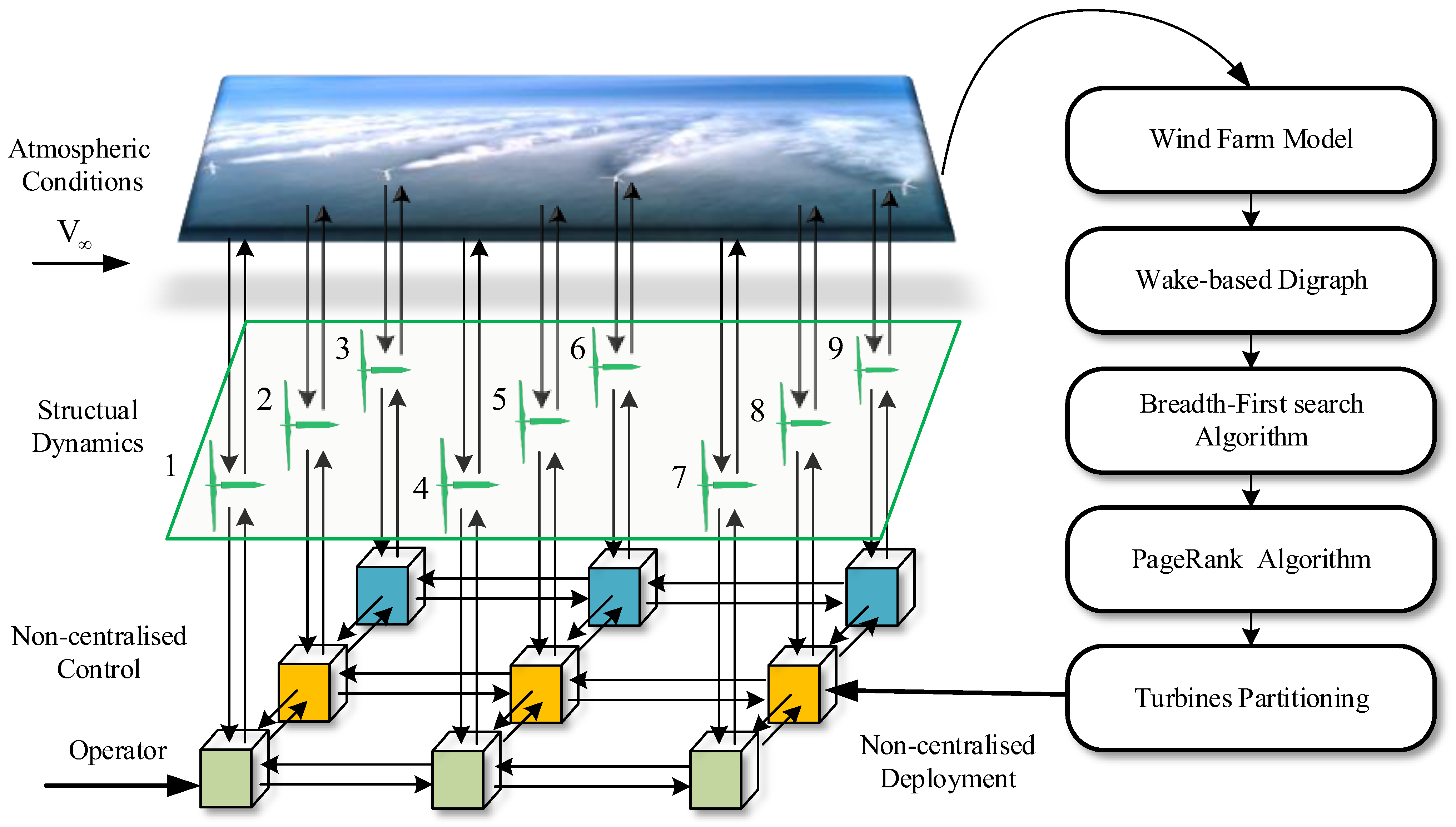
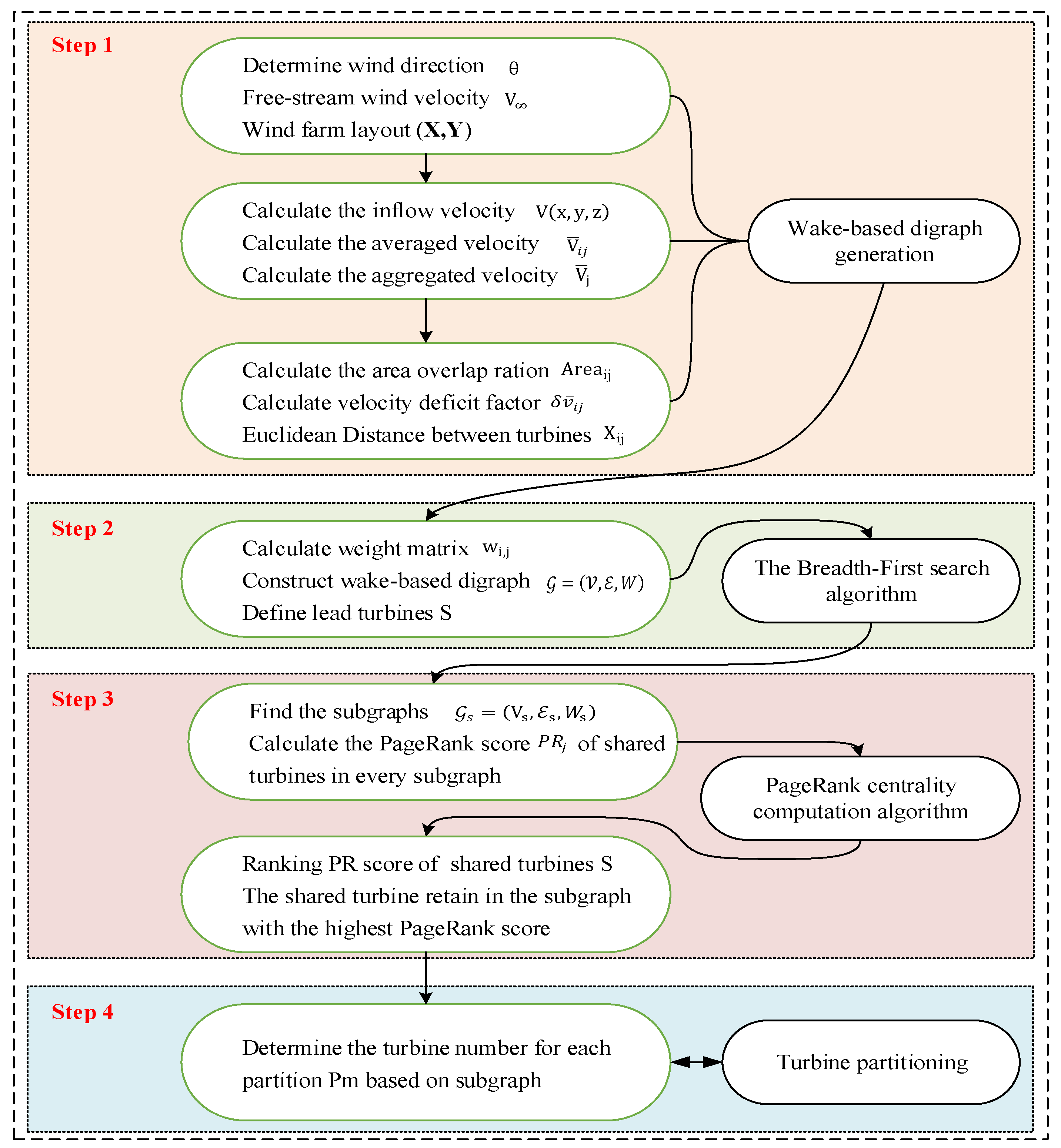
- An edge propagation graph sparsification partitioning strategy is proposed to make an original and important wake coupling relationship between turbines that should be preserved by splitting a large wind farm into several smaller subsets. The breadth-first search (BFS) algorithm finds the subgraphs of the wake-based digraph, and the PageRank centrality computation algorithm determines the optimal turbine partitioning.
- A load-balancing power dispatch strategy is explored that maximises power production of the whole wind farm while minimising the fatigue distribution of wind turbines within the wind farm. By using a single cost function, optimisation is performed, which includes a penalty function that reflects the fatigue distribution standard derivation of a power-controlling optimisation problem that can be combined with optimisation.
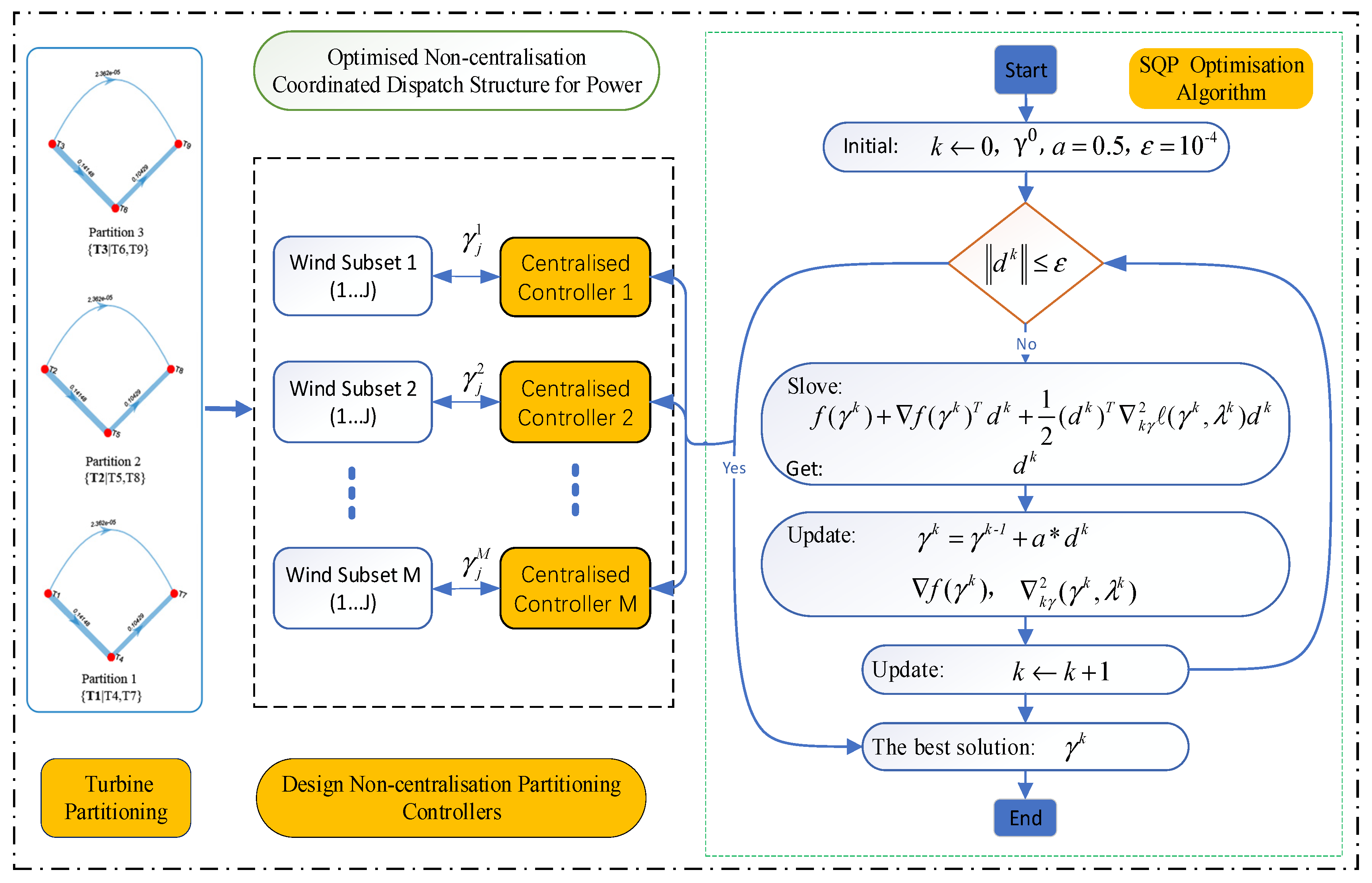
- Non-centralisation sequential quadratic programming (SQP) coordinated optimisation algorithms are developed. The algorithm involves, in addition to the information available to local controllers about communication, the coordination capacity of the distributed system in general solving the nonlinear OWFs power production and fatigue distribution optimisation problem.
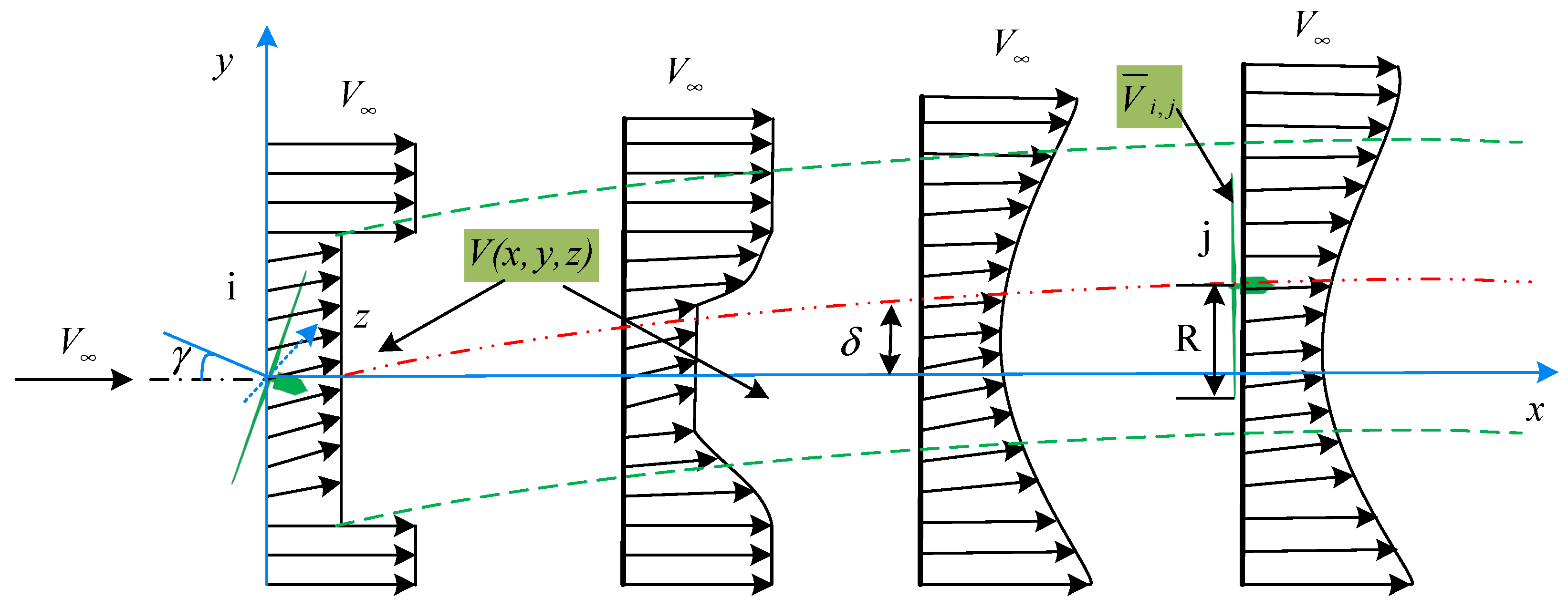
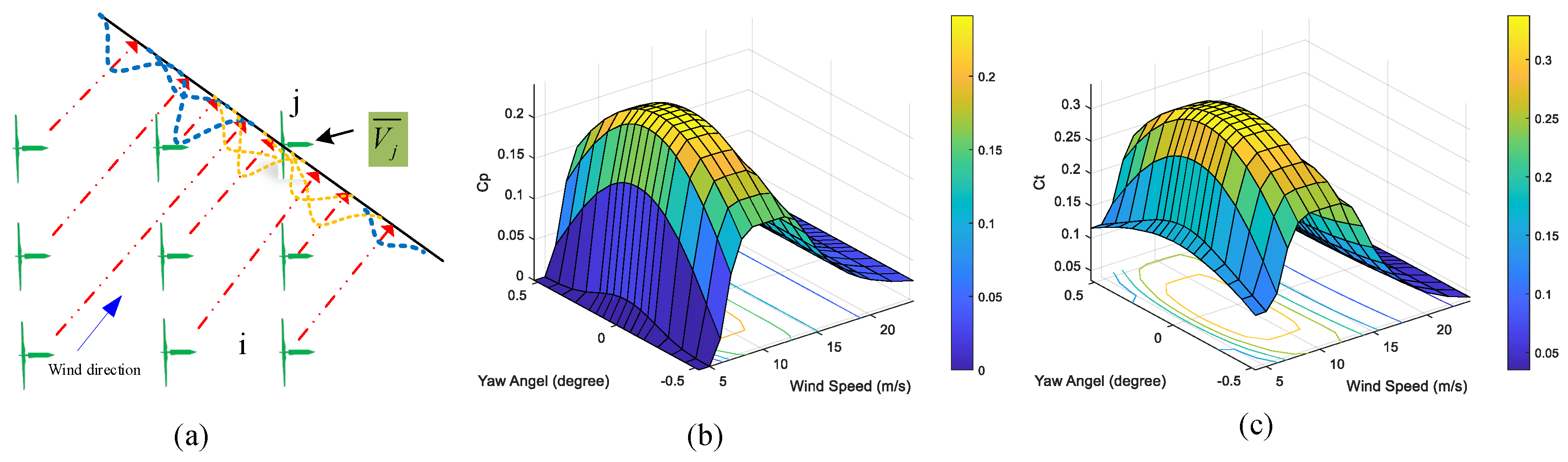
2. Analytical Wake Models
- Calculating power production and fatigue thrust loads of the downstream turbine by using the aggregated velocity
3. Turbine Partitioning for Non-Centralised Control Deployment
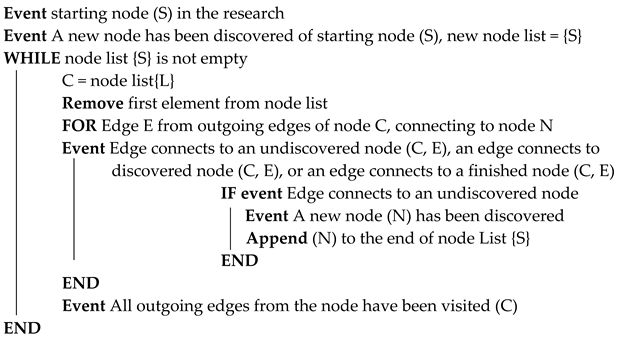
3.1. Finding Subgraph Using the BFS Algorithm
| Algorithm 1: The BFS algorithm finds the subgraph of a lead turbine. |
 |
3.2. Calculating and Ranking the PageRank Score of Subgraphs
3.3. Partitioning Using the Edge Propagation Graph Sparse Strategy
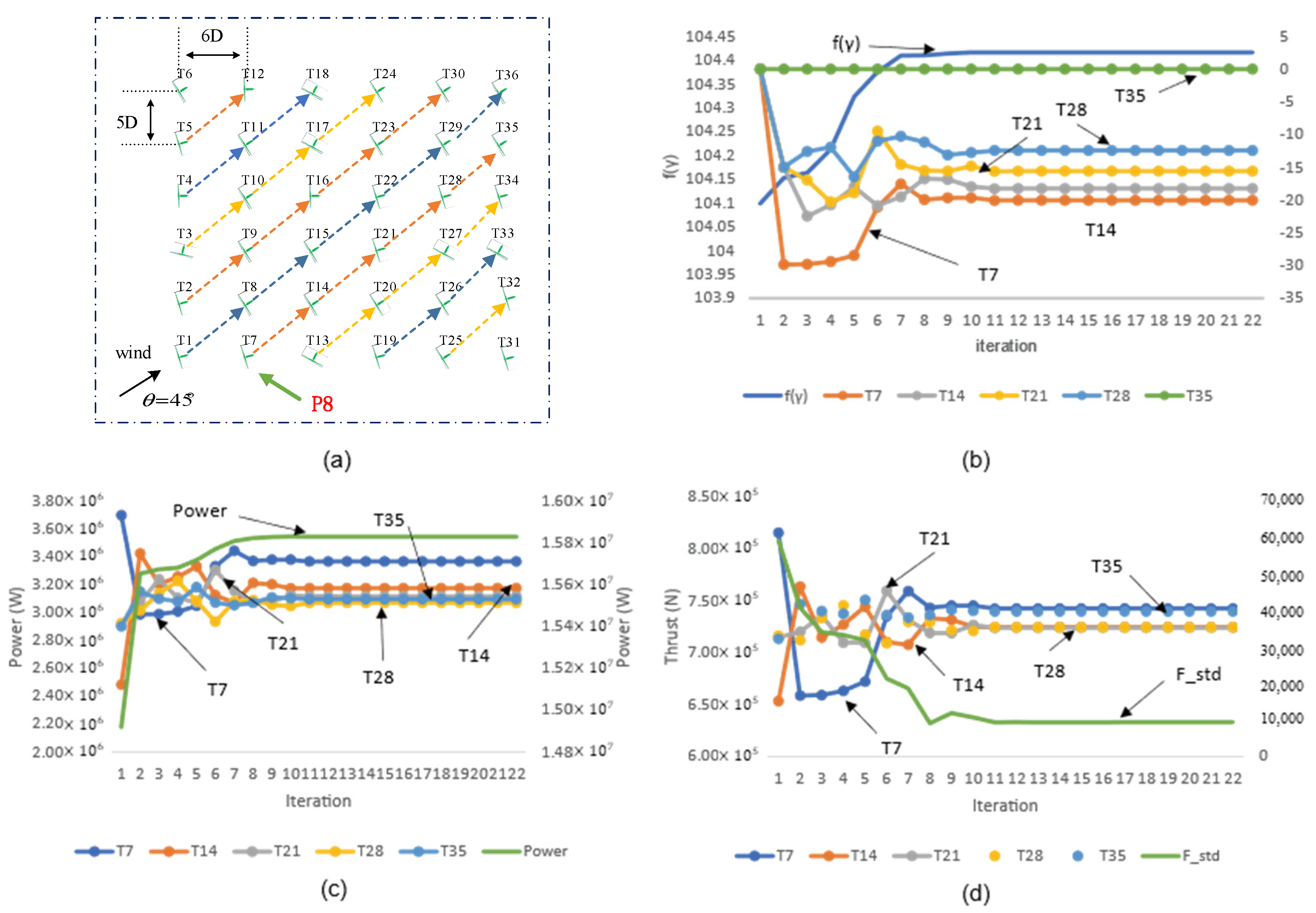
3.4. A Nine-Turbine Case for Turbine Partitioning
4. Problem Formulation and Optimisation
4.1. Optimisation Problem
- maximising the whole production of electricity from wind farms:
- minimising the wind farm standard deviation of the fatigue loading:
4.2. Optimisation Method
5. Validations and Discussion
- Strategy A: MPPT strategy of WF power [41];
- Strategy B: centralised fatigue load-balancing power dispatch strategy [42] (the wind turbines in the wind farm are not partitioned);
- Strategy C: non-centralised fatigue load-balancing power dispatch strategy (the wind turbines in the wind farm are partitioned).
5.1. Turbine Partitioning
5.2. Wind Farm Control Considering a Single Wind Direction
5.3. Expected Improvement in the Wind Farm
5.4. Discussion of the Penalty Factor
6. Conclusions
- Using the edge propagation sparse graph method, a large wind farm can divide into multiple smaller turbine partitioning subsets. The breadth-first search and PageRank centrality computation algorithm were appropriately applied to reduce computation complexity while preserving the important wake coupling relationship between turbines;
- The non-centralised and centralised load-balancing control strategy can increase power production and reduce fatigue standard deviations more than the MPPT strategy does under low-velocity and rated-velocity regions. Nevertheless, there will be a small increase in fatigue of turbines due to the increase in power production;
- However, it is required to balance the accumulated fatigue loading over the wind farm so that the different wind turbines experience similar levels of fatigue loading to reduce maintenance frequency. According to the results, the proposed non-centralised coordination optimisation using SQP algorithm is capable of solving the combined non-convex OWF problems;
- Compared to centralised fatigue load-balancing, the non-centralised strategy consistently reduces calculation time. The whole wind farm optimisation problem is split into several sub-problems, which provide a method to solve the “dimension cruise” of large-scale wind farms.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hosseinzadeh, S.; Etemad-Shahidi, A.; Stewart, R.A. Site Selection of Combined Offshore Wind and Wave Energy Farms: A Systematic Review. Energies 2023, 16, 2074. [Google Scholar] [CrossRef]
- Martínez-Gordón, R.; Sánchez-Diéguez, M.; Fattahi, A.; Morales-España, G.; Sijm, J.; Faaij, A. Modelling a highly decarbonised North Sea energy system in 2050: A multinational approach. Adv. Appl. Energy 2022, 5, 100080. [Google Scholar] [CrossRef]
- Enevoldsen, P.; Jacobson, M.Z. Data investigation of installed and output power densities of onshore and offshore wind turbines worldwide. Energy Sustain. Dev. 2021, 60, 40–51. [Google Scholar] [CrossRef]
- Boersma, S.; Doekemeijer, B.M.; Gebraad, P.M.O.; Fleming, P.A.; Annoni, J.; Scholbrock, A.K.; Frederik, J.A.; van Wingerden, J.-W. A tutorial on control-oriented modeling and control of wind farms. In Proceedings of the IEEE 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1–18. [Google Scholar]
- Kheirabadi, A.C.; Nagamune, R. A quantitative review of wind farm control with the objective of wind farm power maximization. J. Wind Eng. Ind. Aerodyn. 2019, 192, 45–73. [Google Scholar] [CrossRef]
- Hur, S. Modelling and control of a wind turbine and farm. Energy 2018, 156, 360–370. [Google Scholar] [CrossRef]
- Annoni, J.; Bay, C.; Taylor, T.; Pao, L.; Fleming, P.; Johnson, K. Efficient Optimization of Large Wind Farms for Real-Time Control. In Proceedings of the IEEE 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 6200–6205. [Google Scholar]
- Hagen, L.V.; Petrick, K.; Wilhelm, S.; Schmehl, R. Life-Cycle Assessment of a Multi-Megawatt Airborne Wind Energy System. Energies 2023, 16, 1750. [Google Scholar] [CrossRef]
- Siniscalchi-Minna, S.; Bianchi, F.D.; Ocampo-Martinez, C.; Domínguez-García, J.L.; De Schutter, B. A non-centralized predictive control strategy for wind farm active power control: A wake-based partitioning approach. Renew. Energy 2020, 150, 656–669. [Google Scholar] [CrossRef]
- Asim, T.; Islam, S.; Hemmati, A.; Khalid, M. A Review of Recent Advancements in Offshore Wind Turbine Technology. Energies 2022, 15, 579. [Google Scholar] [CrossRef]
- Dongran, S.; Liu, J.; Yang, Y.; Yang, J.; Su, M.; Wang, Y.; Gui, N.; Xuebing, Y.; Huang, L.; Joo, Y.H. Maximum wind energy extraction of large-scale wind turbines using nonlinear model predictive control via Yin-Yang grey wolf optimization algorithm. Energy 2021, 221, 119866. [Google Scholar] [CrossRef]
- Liao, H.; Hu, W.; Wu, X.; Wang, N.; Liu, Z.; Huang, Q.; Chen, C.; Chen, Z. Active power dispatch optimization for offshore wind farms considering fatigue distribution. Renew. Energy 2020, 151, 1173–1185. [Google Scholar] [CrossRef]
- Song, D.; Tu, Y.; Wang, L.; Jin, F.; Li, Z.; Huang, C.; Xia, E.; Rizk-Allah, R.M.; Yang, J.; Su, M.; et al. Coordinated optimization on energy capture and torque fluctuation of wind turbines via variable weight NMPC with fuzzy regulator. Appl. Energy 2022, 312, 118821. [Google Scholar] [CrossRef]
- Gebraad, P.M.O.; van Wingerden, J.W. Maximum power-point tracking control for wind farms: Maximum power-point tracking control for wind farms. Wind Energy 2015, 18, 429–447. [Google Scholar] [CrossRef]
- Gionfra, N.; Sandou, G.; Siguerdidjane, H.; Faille, D.; Loevenbruck, P. Wind farm distributed PSO-based control for constrained power generation maximization. Renew. Energy 2019, 133, 103–117. [Google Scholar] [CrossRef]
- Zhong, S.; Wang, X. Decentralized Model-Free Wind Farm Control via Discrete Adaptive Filtering Methods. IEEE Trans. Smart Grid 2018, 9, 2529–2540. [Google Scholar] [CrossRef]
- Huang, S.; Wu, Q.; Guo, Y.; Lin, Z. Bi-level decentralized active and reactive power control for large-scale wind farm cluster. Int. J. Electr. Power Energy Syst. 2019, 111, 201–215. [Google Scholar] [CrossRef]
- Chen, Y.; Joo, Y.H.; Song, D. Multi-Objective Optimisation for Large-Scale Offshore Wind Farm Based on Decoupled Groups Operation. Energies 2022, 15, 2336. [Google Scholar] [CrossRef]
- Chen, Y.; Joo, Y.-H.; Song, D. Modified Beetle Annealing Search (BAS) Optimization Strategy for Maxing Wind Farm Power through an Adaptive Wake Digraph Clustering Approach. Energies 2021, 14, 7326. [Google Scholar] [CrossRef]
- Shu, T.; Song, D.; Hoon Joo, Y. Decentralised optimisation for large offshore wind farms using a sparsified wake directed graph. Appl. Energy 2022, 306, 117986. [Google Scholar] [CrossRef]
- Shu, T.; Song, D.; Joo, Y.H. Non-centralised coordinated optimisation for maximising offshore wind farm power via a sparse communication architecture. Appl. Energy 2022, 324, 119705. [Google Scholar] [CrossRef]
- Li, Q.; Su, Y.; Tan, M. Coordinative optimization on fatigue distribution and active power in wind farms. IEEE 2016 International Symposium on Electrical Engineering (ISEE), Hong Kong, China, 4 December 2016; pp. 1–6. [Google Scholar]
- Zhang, B.; Soltani, M.; Hu, W.; Hou, P.; Huang, Q.; Chen, Z. Optimized Power Dispatch in Wind Farms for Power Maximizing Considering Fatigue Loads. IEEE Trans. Sustain. Energy 2018, 9, 862–871. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Huang, S.; Shahidehpour, M.; Guo, Q.; Sun, H. Fatigue Load Sensitivity-Based Optimal Active Power Dispatch For Wind Farms. IEEE Trans. Sustain. Energy 2017, 8, 1247–1259. [Google Scholar] [CrossRef]
- Data-Driven Control (TU Delft). 2021. Available online: https://github.com/TUDelft-DataDrivenControl/FLORISSE_M (accessed on 18 April 2021).
- Qian, G.-W.; Ishihara, T. Wind farm power maximization through wake steering with a new multiple wake model for prediction of turbulence intensity. Energy 2021, 220, 119680. [Google Scholar] [CrossRef]
- Gao, X.; Li, B.; Wang, T.; Sun, H.; Yang, H.; Li, Y.; Wang, Y.; Zhao, F. Investigation and validation of 3D wake model for horizontal-axis wind turbines based on filed measurements. Appl. Energy 2020, 260, 114272. [Google Scholar] [CrossRef]
- Doekemeijer, B.M.; van der Hoek, D.; van Wingerden, J.-W. Closed-loop model-based wind farm control using FLORIS under time-varying inflow conditions. Renew. Energy 2020, 156, 719–730. [Google Scholar] [CrossRef]
- Park, J.; Park, J. Physics-induced graph neural network: An application to wind-farm power estimation. Energy 2019, 187, 115883. [Google Scholar] [CrossRef]
- Wen, J.; Zhou, L.; Zhang, H. Mode interpretation of blade number effects on wake dynamics of small-scale horizontal axis wind turbine. Energy 2023, 263, 125692. [Google Scholar] [CrossRef]
- Doekemeijer, B.; van Wingerden, J. Observability of the ambient conditions in model-based estimation for wind farm control: A focus on static models. Wind Energy 2020, 23, 1777–1791. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. Experimental and theoretical study of wind turbine wakes in yawed conditions. J. Fluid Mech. 2016, 806, 506–541. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. A new analytical model for wind-turbine wakes. Renew. Energy 2014, 70, 116–123. [Google Scholar] [CrossRef]
- Park, J.; Law, K.H. Cooperative wind turbine control for maximizing wind farm power using sequential convex programming. Energy Convers. Manag. 2015, 101, 295–316. [Google Scholar] [CrossRef]
- Dou, B.; Qu, T.; Lei, L.; Zeng, P. Optimization of wind turbine yaw angles in a wind farm using a three-dimensional yawed wake model. Energy 2020, 209, 118415. [Google Scholar] [CrossRef]
- Zhang, Y.; Zang, W.; Zheng, J.; Cappietti, L.; Zhang, J.; Zheng, Y.; Fernandez-Rodriguez, E. The influence of waves propagating with the current on the wake of a tidal stream turbine. Appl. Energy 2021, 290, 116729. [Google Scholar] [CrossRef]
- Muggiasca, S.; Taruffi, F.; Fontanella, A.; Di Carlo, S.; Giberti, H.; Facchinetti, A.; Belloli, M. Design of an aeroelastic physical model of the DTU 10MW wind turbine for a floating offshore multipurpose platform prototype. Ocean Eng. 2021, 239, 109837. [Google Scholar] [CrossRef]
- Skiena, S.S. Sorting and Searching. In The Algorithm Design Manual; Springer: London, UK, 2012; pp. 103–144. ISBN 978-1-84800-069-8. [Google Scholar]
- Oldham, S.; Fulcher, B.; Parkes, L.; Arnatkevičiūtė, A.; Suo, C.; Fornito, A. Consistency and differences between centrality measures across distinct classes of networks. PLoS ONE 2019, 14, e0220061. [Google Scholar] [CrossRef] [PubMed]
- Gu, B.; Meng, H.; Ge, M.; Zhang, H.; Liu, X. Cooperative multiagent optimization method for wind farm power de-livery maximization. Energy 2021, 233, 121076. [Google Scholar] [CrossRef]
- Gebraad, P.M.O.; Teeuwisse, F.W.; Van Wingerden, J.W.; Fleming, P.A.; Ruben, S.D.; Marden, J.R.; Pao, L.Y. Wind plant power optimization through yaw control using a parametric model for wake effects a CFD simulation study: Wind plant optimization by yaw control using a parametric wake model. Wind Energ. 2016, 19, 95–114. [Google Scholar] [CrossRef]
- Van Dijk, M.T.; Van Wingerden, J.-W.; Ashuri, T.; Li, Y. Wind farm multi-objective wake redirection for optimizing power production and loads. Energy 2017, 121, 561–569. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Event | Node | Edge | |
|---|---|---|---|---|
| Start Node | End Node | |||
| 1 | Starting node 2. | 2 | ||
| 2 | Discover a new node 2. | 2 | ||
| 3 | Discover an edge between node 2 and node 5. | 2 | 5 | |
| 4 | Discover a new node 5. | 5 | ||
| 5 | Discover an edge between node 2 and node 8. | 2 | 8 | |
| 6 | Discover a new node 8. | 8 | ||
| 7 | Discover an edge between node 2 and node 9. | 2 | 9 | |
| 8 | Discover a new node 9. | 9 | ||
| 9 | Starting from node 2, it visits all outgoing edges. | 2 | ||
| 10 | Previously discovered nodes (5 and 8) are connected by an edge. | 5 | 8 | |
| 11 | Previously discovered nodes (5 and 9) are connected by an edge. | 5 | 9 | |
| 12 | Starting from node 5, it visits all outgoing edges. | 5 | ||
| 13 | Starting from node 8, it visits all outgoing edges. | 8 | ||
| 14 | Starting from node 9, it visits all outgoing edges. | 9 | ||
| Subgraph Subsets | PR Scores | Partitioned Subsets |
|---|---|---|
| } | } | |
| S2:{T19|T26,T33} | P2:{T19|T26,T33} | |
| } | } | |
| S4:{T4|T11,T18} | P4:{T4|T11,T18} | |
| S5:{T3|T10,T17,T24} | T24:0.3742 | P5:{T3|T10,T17,T24} |
| S6:{T2|T9,T16,T23,T24,T30} | T23:0.2354 T24:0.0763 T30:0.2834 | P6:{T2|T30,T23,T16,T9} |
| S7:{T13|T20,T27,T34,T35} | T35: 0.1053 | P7:{T13|T20,T27,T34} |
| S8:{T7|T14, T21,T28,T29,T35,T36} | T29:0.0670 T35:0.2479 T36: 0.1251 | P8:{T7|T14,T21,T28,T35} |
| S9:{T1|T8,T15,T22,T23,T29,T30,T36} | T23:0.0528 T29:0.1890 T30:0.0985 T36:0.2195 | P9:{T1|T8,T15,T22,T29,T36} |
| S10:{T25|T32} | P10:{T25|T32} | |
| S11:{T5|T12} | P11:{T5|T12} |
| Strategy | Output Power (MW) | Fatigue Distribution () | Fatigue Thrust (MN) | Computational Time (S) |
|---|---|---|---|---|
| A | 109.5372 | 6.2596 | 26.2778 | 0.1663 |
| B | 115.5104 | 0.9579 | 26.6392 | 436.3909 |
| C | 114.7742 | 2.1228 | 26.4134 | 266.1419 |
| Wind Speed (m/s) | Strategy A | Strategy B | Strategy C | (B−A)/A | (C−A)/A | |
|---|---|---|---|---|---|---|
| Output Power (W) | 8 | 4.1209 | 4.2659 | 4.2467 | 3.75% | 3.25% |
| 11.4 | 1.1537 | 1.1760 | 1.1724 | 2.10% | 1.77% | |
| 18 | 1.3320 | 1.3320 | 1.3320 | 0.00% | 0.00% | |
| Fatigue Std | 8 | 2.2814 | 7.0534 | 9.9224 | −61.29% | −49.96% |
| 11.4 | 2.6728 | 1.2532 | 1.3845 | −34.77% | −32.45% | |
| 18 | 4.4428 | 1.4848 | 3.1529 | −94.57% | −63.12% | |
| Thrust loads (N) | 8 | 9.8307 | 9.8639 | 9.8312 | 0.36% | 0.02% |
| 11.4 | 1.8324 | 1.8494 | 1.8491 | 0.96% | 0.95% | |
| 18 | 1.0630 | 1.0691 | 1.1454 | 0.57% | 7.72% |
| Wind Speed | Calculation Time (s) | ||
|---|---|---|---|
| Strategy A | Strategy B | Strategy C | |
| 8 m/s | 0.1652 | 391.4392 | 209.4987 |
| 11.4 m/s | 0.1503 | 215.9121 | 127.6709 |
| 18 m/s | 0.1616 | 395.4584 | 201.5212 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shu, T.; Joo, Y.H. Non-Centralised Balance Dispatch Strategy in Waked Wind Farms through a Graph Sparsification Partitioning Approach. Energies 2023, 16, 7131. https://doi.org/10.3390/en16207131
Shu T, Joo YH. Non-Centralised Balance Dispatch Strategy in Waked Wind Farms through a Graph Sparsification Partitioning Approach. Energies. 2023; 16(20):7131. https://doi.org/10.3390/en16207131
Chicago/Turabian StyleShu, Tong, and Young Hoon Joo. 2023. "Non-Centralised Balance Dispatch Strategy in Waked Wind Farms through a Graph Sparsification Partitioning Approach" Energies 16, no. 20: 7131. https://doi.org/10.3390/en16207131
APA StyleShu, T., & Joo, Y. H. (2023). Non-Centralised Balance Dispatch Strategy in Waked Wind Farms through a Graph Sparsification Partitioning Approach. Energies, 16(20), 7131. https://doi.org/10.3390/en16207131