

Integrating Demand Response for Enhanced Load Frequency Control in Micro-Grids with Heating, Ventilation and Air-Conditioning Systems



Abstract
1. Introduction
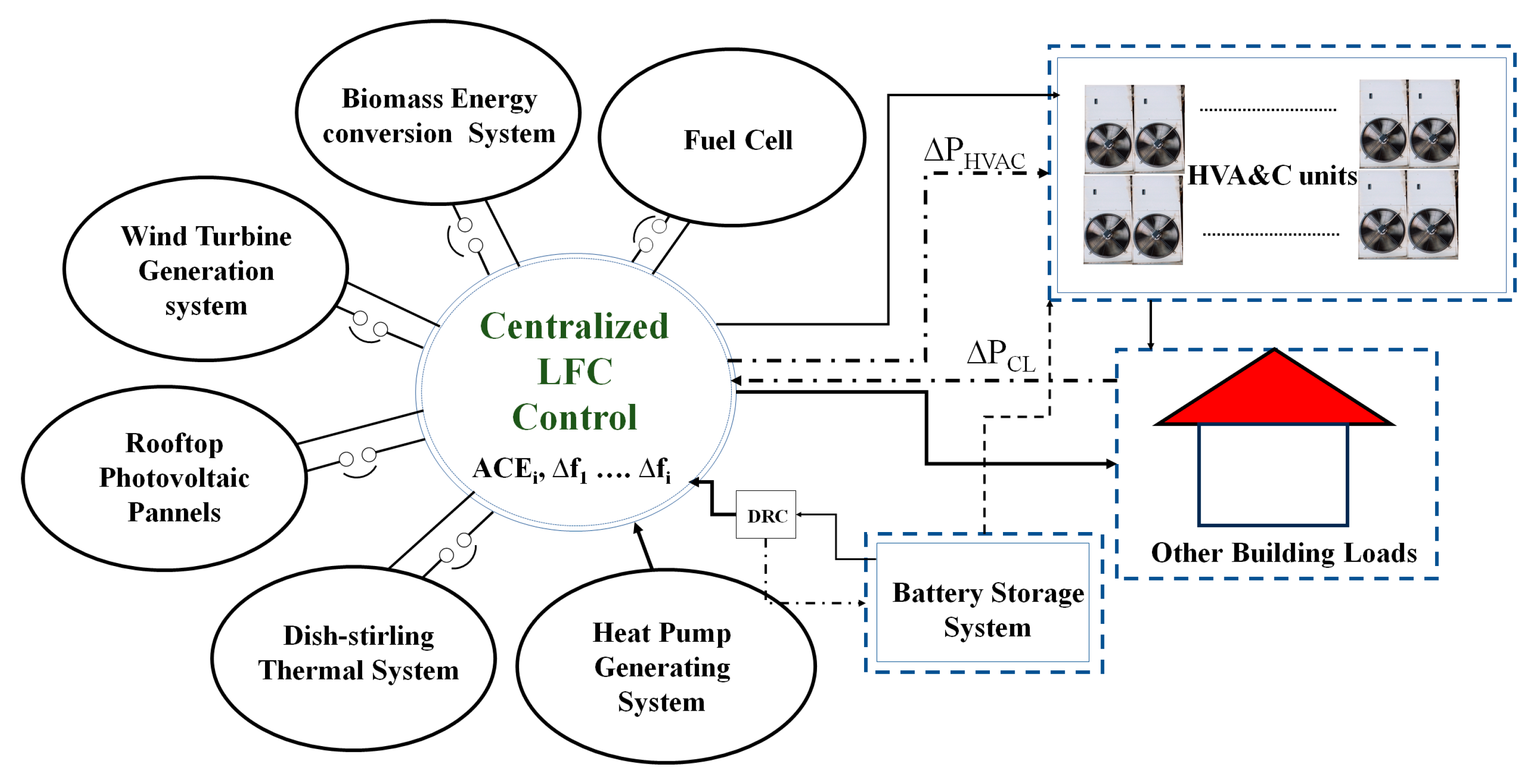
- Development of a micro-grid (µG) model for simulation in MATLAB/Simulink, including an integrated HPG system, RESs (PV, DSTS, WTS, FC), an ESD unit and a developed HVAC system as a critical load. This integration is a novel approach.
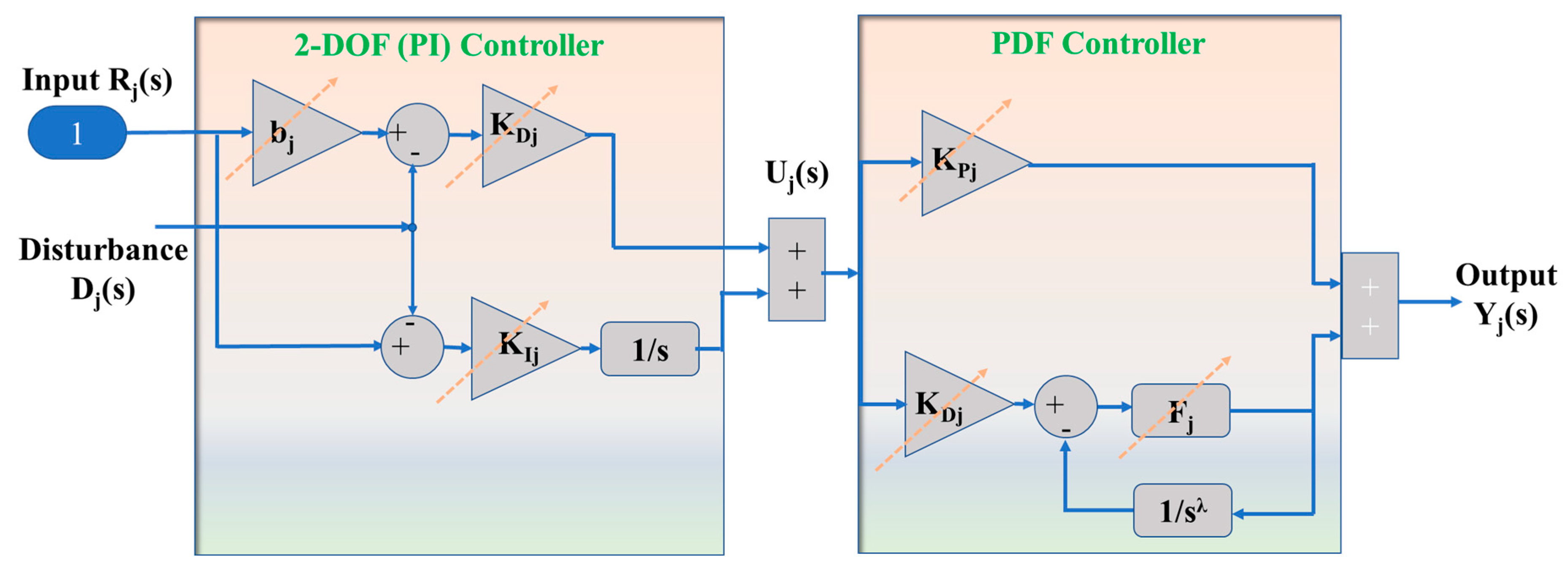
- A new cascaded 2-DOF (PI) and PDF controller is proposed and optimized with a number of recent meta-heuristic search algorithms, including the modified crow search algorithm (mCSA) considering the number of performance indices (PICs) for comparison before finalization regarding the best optimization algorithm and best PIC for reducing the frequency deviation in the µG system.
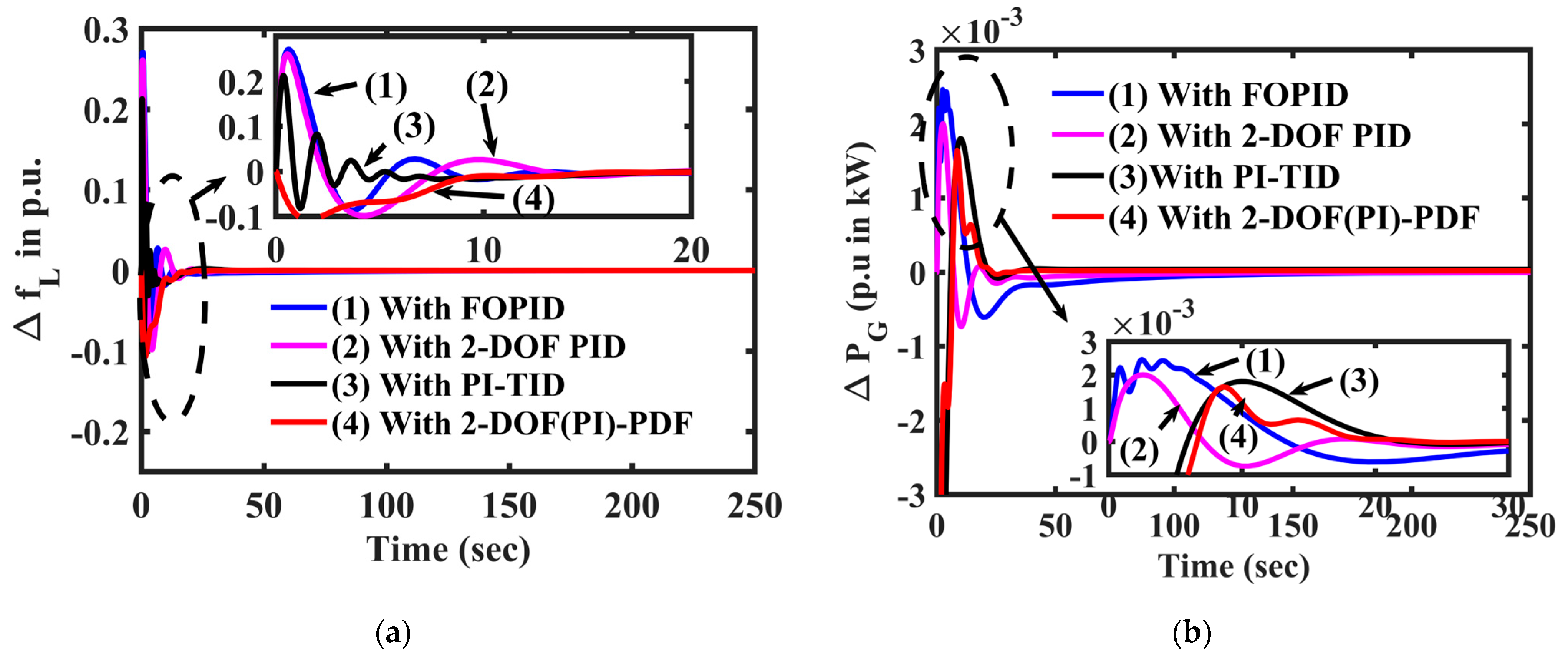
- The superiority of the proposed new cascaded controller as above is established after comparing its dynamic performance with other similar controllers, such as FOPID, 2-DOF with PID and PI-TID, in terms of the settling time, peak overshoot and undershoot and number of oscillations.
- To enhance the dynamic behavior using the proposed control scheme, DR management and a sensitivity analysis of different loading conditions are conducted for different scenarios.
2. Investigation of HVAC Integrated µG System
Problem Formulation of Proposed µG
3. System Components and Their Description
3.1. Proposed Heat Pump Generating System Modeling
3.2. Solar PV System
3.3. Wind Turbine System (WTS)
3.4. Dish–Stirling Solar System (DSTS)
3.5. Fuel Cell
3.6. Energy Storage Device
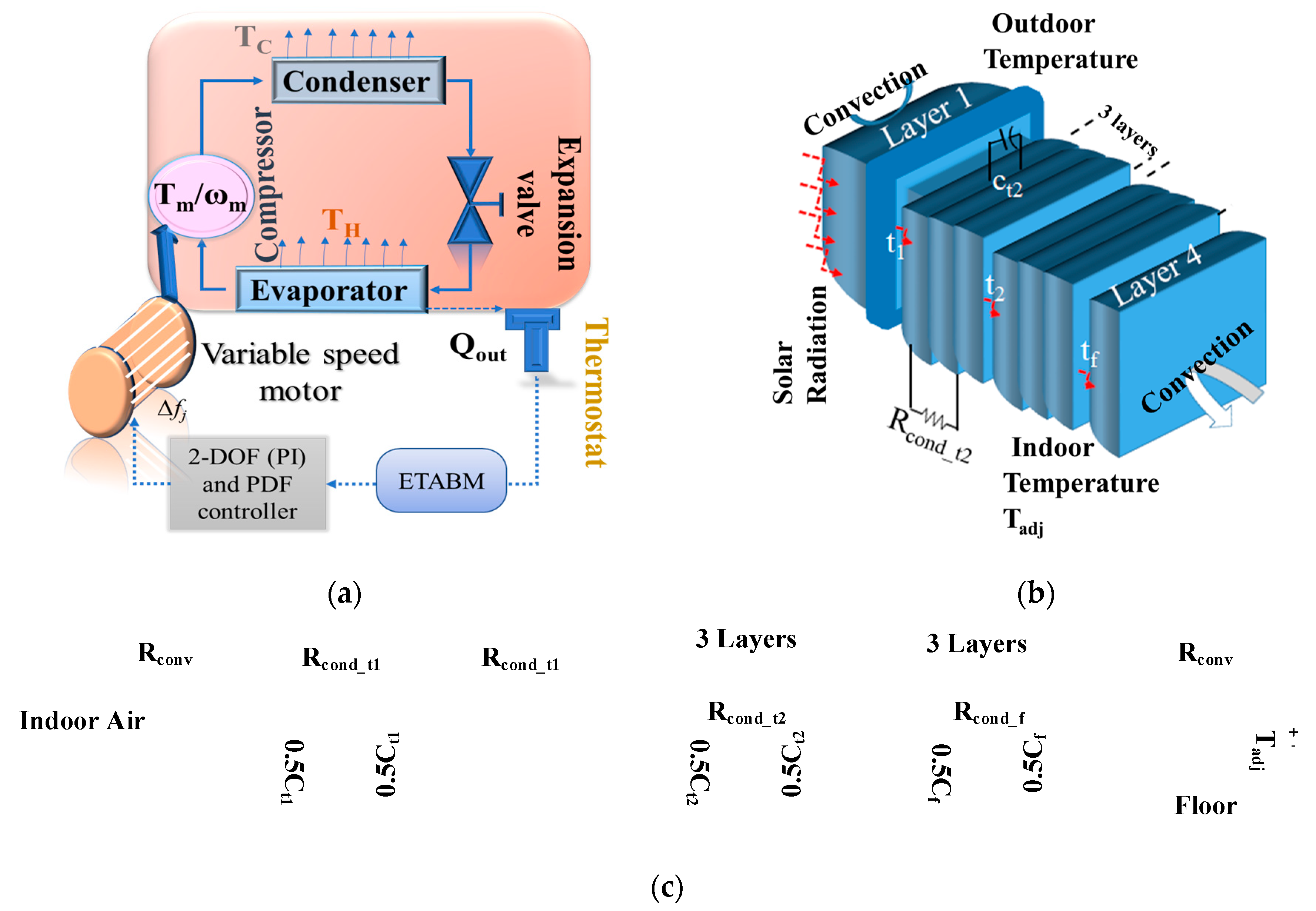
3.7. Proposed Heating, Ventilation and Air-Conditioning System (HVAC) for Aggregated Building Model
3.7.1. Variable Speed Heat Pump (VSHP) for HVAC
3.7.2. Equivalent Thermal Activated Building Model (ETABM)
3.7.3. Thermostat Model
4. The Proposed Control Strategy for LFC in the µG Model
4.1. Controller Formulation
4.2. Flower Pollination Algorithm (FPA)
4.3. Crow Search Algorithm (CSA)
4.4. Modified Crow Search Algorithm (mCSA)
5. Results and Analysis
- Scenario 1: Performance evaluation of the system with various PICs and with the proposed controller to obtain the best PIC.
- Scenario 2: Performance evaluation of the system with various meta-heuristic techniques, one at a time, with the proposed controller and with the best PIC to find the best among all.
- Scenario 3: Comparative analysis to determine the effectiveness of the proposed controller with different evaluation controllers, each one optimized with the best algorithm and the best PIC.
- Scenario 4: Performance evaluation of the system with DR.
- Scenario 5: Assessment of system performance when the system coefficient varies from its nominal loading condition.
5.1. Scenario 1: Performance Evaluation of the System with Various PICs and with the Proposed Controller to Obtain the Best PIC
5.2. Scenario 2: Performance Evaluation of the System with Various Meta-Heuristic Techniques, One at a Time, with the Proposed Controller and with the Best PIC to Find the Best among All
5.3. Scenario 3: Comparative Analysis to Determine the Effectiveness of the Proposed Controller with Different Evaluation Controllers, Each One Optimized with the Best Algorithm and the Best PIC
5.4. Scenario 4: Verification of System Performance with DR
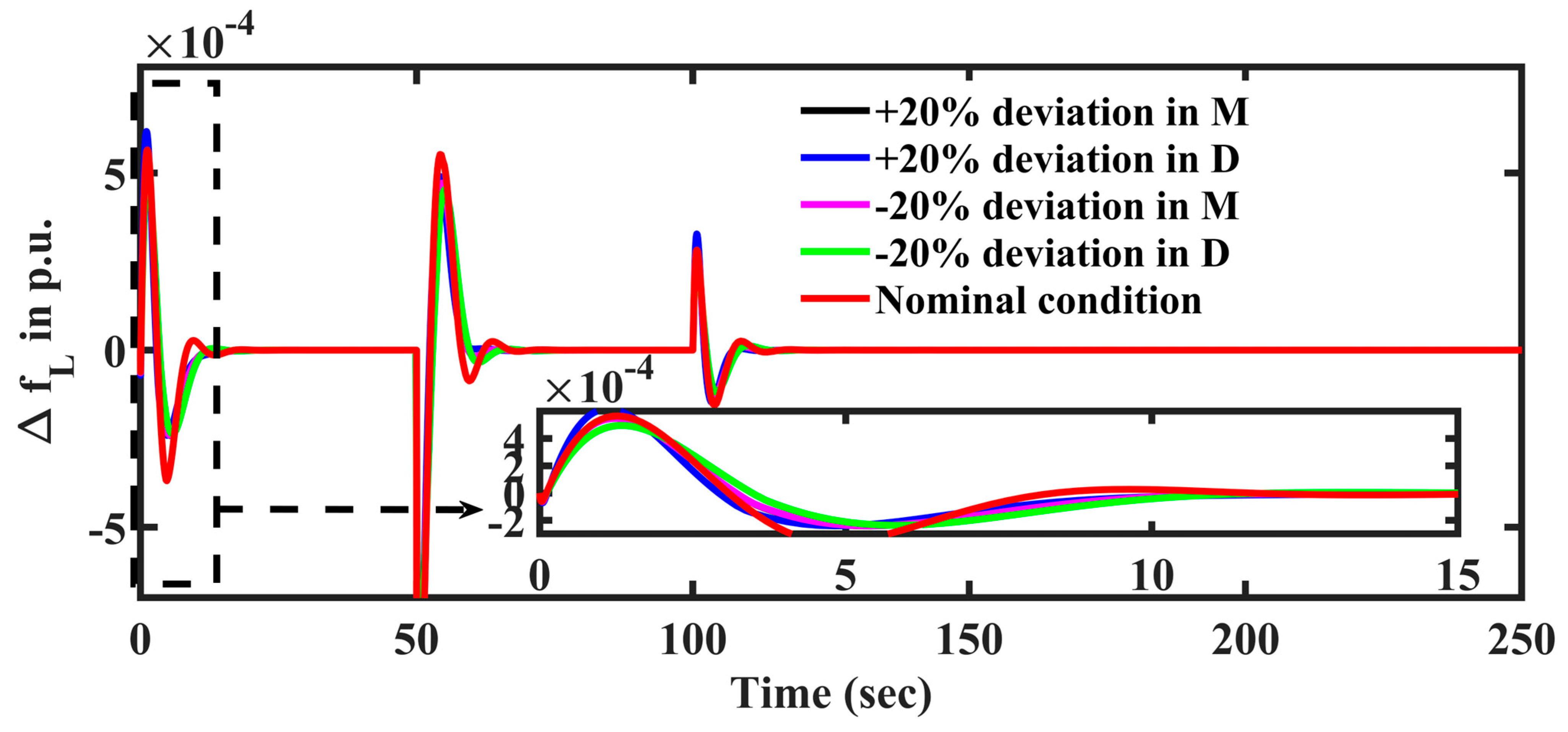
5.5. Scenario 5: Assessment of System Performance when the System Coefficient Varies from Its Nominal Loading Condition
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| a0, a1, a2, | Gain constant for heat gains of HVAC system | KPV | The gain constant of PV system |
| b0, b1, b2 | Time constant for heat gains of HVAC system | KWTG | The gain constant for WTS |
| ΔfL | Load frequency variation in µG | kt | DR participation factor |
| Δf | Reference frequency variation in µG | KDSTS | The gain constant of DSTS |
| PHPG | The power generated by HPG | KFC | The gain constant of FC |
| PPV | The power generated by PV | KHPG | The gain constant of HPG plant |
| PWTS | The power generated by WTS | KESD | The gain constant of ESD |
| PFC | The power generated by FC | KE | The gain constant of ETABM |
| PDSTS | The power generated by DSTS | KTH | The gain of thermostat |
| PESD | The output power of ESD | KE | The gain of ETABM |
| Pm | Mechanical output of VSHP | Tm1, Tm2, Tm3 | The gain constants of compressor |
| ∆Pr | Reference power error | τPV | Time constant for PV |
| ∆Pgov | Small deviation in governor power | τWTG | Time constant for WTG |
| ∆Pv | Change in valve output | τDSTS | Time constant for DSTS |
| ∆PTur | Turbine power deviations | τgov | Time constant for governor |
| ∆PHPG | Perturbation in generator output | τE | Time constant for ETABM |
| ∆PCL | Step load change | τm1, τm2, τm3 | Time constants for compressor for VSHP |
| ΔPG | Discrepancy between the load and the generation | τFC | Time constant for FC |
| ΔPg | µG power generation deviation | τESD | Time constant for ESD |
| ∆Pm | Small fluctuations in mechanical output of VSHP | τGen,1, τGen,2 | Time constants for HPG generators |
| ∆PHVAC | Change in HVAC output | ∆ϕ | Solar insolation |
| Ggov | Governor transfer function for HPG | ∆ν | Wind input variation |
| Gsys | µG system transfer function | R | Droop constant |
| GHPG | Transfer function of HPG | ∆xV | Change in valve position |
| GPV | Transfer function of PV | ky | Fluid constant for governor |
| GWTG | Transfer function of WTS | Yj | Output of the cascaded controller |
| GDSSP | Transfer function of DSTS | Uj | Primary control output |
| GFC | Transfer function of FC | J | The moment of inertia of the motor VSHP |
| GC | Controller transfer function | B | and friction coefficient of the motor VSHP |
| GESD | Transfer function of ESD | M | Equivalent inertia constant |
| GVSHP | Transfer function of VSHP | D | Damping constant (p.u. MW/Hz) |
| GTh | Transfer function of thermostat | IAE | Integrating absolute error |
| GCom | Transfer function of compressor | ISE | Integrating square error |
| GETABM | Transfer function of ETABM | ITAE | Integrating time absolute error |
| ∆ωv | Change in speed | ITSE | Integrating time square error |
| ωr | Reference speed of the VSHP output |
Appendix A
- FPA algorithm: maximum iterations = 140; population size = 20; switching probability = 0.8; Lévy flight = 1.5.
- CSA algorithm: population size = 20; number of iterations = 140; AP = 0.5; fl = 0.5.
- mCSA algorithm: population size = 50; number of iterations = 140; AP = 0.5; fl = 2; wmax = 0.9; wmin = 0.1; CO1 and CO2 = 2; Smax = 25; and Smin = 5.
References
- Awad, B.; Ekanayake, J.; Jenkins, N. Intelligent Load Control for Frequency Regulation in Microgrids. Intell. Autom. Soft Comput. 2010, 16, 303–318. [Google Scholar] [CrossRef]
- Kaja, N. An Overview of Energy Sector in India. Int. J. Sci. Res. 2015, 6, 2319–7064. [Google Scholar]
- Ma, Y.; Saha, S.; Miller, W.; Guan, L. Comparison of Different Solar-Assisted Air Conditioning Systems for Australian Office Buildings. Energies 2017, 10, 1463. [Google Scholar] [CrossRef]
- CBECS_2018_Building_Characteristics_Flipbook. Available online: https://www.eia.gov/consumption/commercial/data/2018/pdf/CBECS%202018%20CE%20Release%202%20Flipbook.pdf (accessed on 18 July 2023).
- Li, N.; Kwak, J.; Becerik-Gerber, B.; Tambe, M. Predicting HVAC Energy Consumption in Commercial Buildings Using Multiagent Systems. In Proceedings of the 30th International Symposium on Automation and Robotics in Construction and Mining (ISARC 2013), Montreal, QC, Canada, 11–15 August 2013. [Google Scholar]
- Knight, I.P. Assessing Electrical Energy Use in HVAC Systems. REHVA J. 2012, 49, 6–11. [Google Scholar]
- Mohsenian-Rad, A.-H.; Wong, V.W.S.; Jatskevich, J.; Schober, R.; Leon-Garcia, A. Autonomous Demand-Side Management Based on Game-Theoretic Energy Consumption Scheduling for the Future Smart Grid. IEEE Trans. Smart Grid. 2010, 1, 320–331. [Google Scholar] [CrossRef]
- Neves, D.; Silva, C.A.; Connors, S. Design and Implementation of Hybrid Renewable Energy Systems on Micro-Communities: A Review on Case Studies. Renew. Sustain. Energy Rev. 2014, 31, 935–946. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. State-of-the-Art of Controllers and Soft Computing Techniques for Regulated Load Frequency Management of Single/Multi-Area Traditional and Renewable Energy Based Power Systems. Appl. Energy 2020, 266, 114858. [Google Scholar] [CrossRef]
- Ramapragada, P.; Tejaswini, D.; Garg, V.; Mathur, J.; Gupta, R. Investigation on Air Conditioning Load Patterns and Electricity Consumption of Typical Residential Buildings in Tropical Wet and Dry Climate in India. Energy Inform. 2022, 5, 61. [Google Scholar] [CrossRef]
- Tasnin, W.; Saikia, L.C.; Raju, M. Deregulated AGC of Multi-Area System Incorporating Dish-Stirling Solar Thermal and Geothermal Power Plants Using Fractional Order Cascade Controller. Int. J. Electr. Power Energy Syst. 2018, 101, 60–74. [Google Scholar] [CrossRef]
- Alayi, R.; Zishan, F.; Seyednouri, S.R.; Kumar, R.; Ahmadi, M.H.; Sharifpur, M. Optimal Load Frequency Control of Island Microgrids via a Pid Controller in the Presence of Wind Turbine and Pv. Sustainability 2021, 13, 10728. [Google Scholar] [CrossRef]
- Iksan, N.; Ubaid Firdaus, M.; Apriaskar, E.; Nugroho, A.; Devi Udayanti, E.; Adi Widodo, D. Electronic Load Controller Based on Modified Firefly Algorithm to Reduce Frequency Fluctuation of Generator in Micro Hydro Power Plants. Int. J. Renew. Energy Res. 2023, 13, 601–611. [Google Scholar]
- Das, D.C.; Roy, A.K.; Sinha, N. GA Based Frequency Controller for Solar Thermal-Diesel-Wind Hybrid Energy Generation/Energy Storage System. Int. J. Electr. Power Energy Syst. 2012, 43, 262–279. [Google Scholar] [CrossRef]
- Mahto, T.; Mukherjee, V. Fractional Order Fuzzy PID Controller for Wind Energy-Based Hybrid Power System Using Quasi-Oppositional Harmony Search Algorithm. IET Gener. Transm. Distrib. 2017, 11, 3299–3309. [Google Scholar] [CrossRef]
- Ali, M.; Kotb, H.; Aboras, K.M.; Abbasy, N.H. Design of Cascaded Pi-Fractional Order PID Controller for Improving the Frequency Response of Hybrid Microgrid System Using Gorilla Troops Optimizer. IEEE Access 2021, 9, 150715–150732. [Google Scholar] [CrossRef]
- Nayak, P.C.; Prusty, U.C.; Prusty, R.C.; Panda, S. Imperialist Competitive Algorithm Optimized Cascade Controller for Load Frequency Control of Multi-Microgrid System. Energy Sources Part A Recovery Util. Environ. Eff. 2021, 1–23. [Google Scholar] [CrossRef]
- Kumar, A.; Khadanga, R.K.; Panda, S. Reinforced Modified Equilibrium Optimization Technique-Based MS-PID Frequency Regulator for a Hybrid Power System with Renewable Energy Sources. Soft Comput. 2022, 26, 5437–5455. [Google Scholar] [CrossRef]
- Nayak, P.C.; Prusty, R.C.; Panda, S. Grasshopper Optimisation Algorithm of Multistage PDF+ (1 + PI) Controller for AGC with GDB and GRC Nonlinearity of Dispersed Type Power System. Int. J. Ambient. Energy 2022, 43, 1469–1481. [Google Scholar] [CrossRef]
- Sahu, P.C.; Prusty, R.C.; Panda, S. Frequency Regulation of an Electric Vehicle-Operated Micro-Grid under WOA-Tuned Fuzzy Cascade Controller. Int. J. Ambient. Energy 2022, 43, 2900–2911. [Google Scholar] [CrossRef]
- Sarif, M.; Kumar, D.V.A.; Venu, M.; Rao, G. Comparison Study of PID Controller Tuning Using Classical/Analytical Methods. Int. J. Appl. Eng. Res. 2018, 13, 5618–5625. [Google Scholar]
- Saponara, S.; Saletti, R.; Mihet-Popa, L. Hybrid Micro-Grids Exploiting Renewables Sources, Battery Energy Storages, and Bi-Directional Converters. Appl. Sci. 2019, 9, 4973. [Google Scholar] [CrossRef]
- Barik, A.K.; Jaiswal, S.; Das, D.C. Recent Trends and Development in Hybrid Microgrid: A Review on Energy Resource Planning and Control. Int. J. Sustain. Energy 2022, 41, 308–322. [Google Scholar] [CrossRef]
- Ranjan, S.; Das, D.C.; Latif, A.; Sinha, N. LFC for Autonomous Hybrid Micro Grid System of 3 Unequal Renewable Areas Using Mine Blast Algorithm. Int. J. Renew. Energy Res. 2018, 8, 1297–1308. [Google Scholar] [CrossRef]
- Prusty, U.C.; Nayak, P.C.; Prusty, R.C.; Panda, S. An Improved Moth Swarm Algorithm Based Fractional Order Type-2 Fuzzy PID Controller for Frequency Regulation of Microgrid System. Energy Sources Part A Recovery Util. Environ. Eff. 2022, 1–23. [Google Scholar] [CrossRef]
- Sahoo, S.C.; Barik, A.K.; Das, D.C. A Novel Green Leaf-Hopper Flame Optimization Algorithm for Competent Frequency Regulation in Hybrid Microgrids. Int. J. Numer. Model. Electron. Netw. Devices Fields 2022, 35, e2982. [Google Scholar] [CrossRef]
- Murugesan, D.; Jagatheesan, K.; Shah, P.; Sekhar, R. Fractional Order PIλDμ Controller for Microgrid Power System Using Cohort Intelligence Optimization. Results Control. Optim. 2023, 11, 100218. [Google Scholar] [CrossRef]
- Rouzbahani, H.M.; Karimipour, H.; Lei, L. Optimizing Scheduling Policy in Smart Grids Using Probabilistic Delayed Double Deep Q-Learning (P3DQL) Algorithm. Sustain. Energy Technol. Assess. 2022, 53, 102712. [Google Scholar] [CrossRef]
- Bao, Y.; Li, Y.; Hong, Y.; Wang, B. Design of a Hybrid Hierarchical Demand Response Control Scheme for the Frequency Control. IET Gener. Transm. Distrib. 2015, 9, 2303–2310. [Google Scholar] [CrossRef]
- Liu, L.; Matayoshi, H.; Lotfy, M.; Datta, M.; Senjyu, T. Load Frequency Control Using Demand Response and Storage Battery by Considering Renewable Energy Sources. Energies 2018, 11, 3412. [Google Scholar] [CrossRef]
- Jiang, H.; Lin, J.; Song, Y.; Gao, W.; Xu, Y.; Shu, B.; Li, X.; Dong, J. Demand Side Frequency Control Scheme in an Isolated Wind Power System for Industrial Aluminum Smelting Production. In Proceedings of the 2014 IEEE PES General Meeting|Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; IEEE: New York City, NY, USA, 2014; pp. 844–853. [Google Scholar]
- Gouveia, C.; Moreira, J.; Moreira, C.L.; Pecas Lopes, J.A. Coordinating Storage and Demand Response for Microgrid Emergency Operation. IEEE Trans. Smart Grid 2013, 4, 1898–1908. [Google Scholar] [CrossRef]
- Wei, H.; Xin, W.; Jiahuan, G.; Jianhua, Z.; Jingyan, Y. Discussion on Application of Super Capacitor Energy Storage System in Microgrid. In Proceedings of the 2009 International Conference on Sustainable Power Generation and Supply, Nanjing, China, 6–7 April 2009; pp. 1–4. [Google Scholar]
- Safdarian, A.; Fotuhi-Firuzabad, M.; Lehtonen, M. Benefits of Demand Response on Operation of Distribution Networks: A Case Study. IEEE Syst. J. 2016, 10, 189–197. [Google Scholar] [CrossRef]
- Malik, A.; Ravishankar, J. A Hybrid Control Approach for Regulating Frequency through Demand Response. Appl. Energy 2018, 210, 1347–1362. [Google Scholar] [CrossRef]
- Eissa, M.M.; Ali, A.A.; Abdel-Latif, K.M.; Al-Kady, A.F. Emergency Frequency Control by Using Heavy Thermal Conditioning Loads in Commercial Buildings at Smart Grids. Electr. Power Syst. Res. 2019, 173, 202–213. [Google Scholar] [CrossRef]
- Saxena, S.; Fridman, E. Event-Triggered Load Frequency Control via Switching Approach. IEEE Trans. Power Syst. 2020, 35, 4484–4494. [Google Scholar] [CrossRef]
- Jiang, T.; Ju, P.; Wang, C.; Li, H.; Liu, J. Coordinated Control of Air-Conditioning Loads for System Frequency Regulation. IEEE Trans. Smart Grid 2021, 12, 548–560. [Google Scholar] [CrossRef]
- Zhang, D.; Li, C.; Luo, S.; Luo, D.; Shahidehpour, M.; Chen, C.; Zhou, B. Multi-Objective Control of Residential HVAC Loads for Balancing the User’s Comfort with the Frequency Regulation Performance. IEEE Trans. Smart Grid 2022, 13, 3546–3557. [Google Scholar] [CrossRef]
- Ozturk, Y.; Senthilkumar, D.; Kumar, S.; Lee, G. An Intelligent Home Energy Management System to Improve Demand Response. IEEE Trans. Smart Grid 2013, 4, 694–701. [Google Scholar] [CrossRef]
- Latif, A.; Ranjan, S.; Hussain, I.; Das, D.C.; Ranjan, S.; Hussain, I. Integrated Demand Side Management and Generation Control for Frequency Control of a Microgrid Using PSO and FA Based Controller. Int. J. Renew. Energy Res. 2018, 8, 188–199. [Google Scholar]
- Rasmussen, T.B.H.; Wu, Q.; Zhang, M. Combined Static and Dynamic Dispatch of Integrated Electricity and Heat System: A Real-Time Closed-Loop Demonstration. Int. J. Electr. Power Energy Syst. 2022, 143, 107964. [Google Scholar] [CrossRef]
- Babu, N.R.; Saikia, L.C. Load Frequency Control of a Multi-Area System Incorporating Realistic High-Voltage Direct Current and Dish-Stirling Solar Thermal System Models under Deregulated Scenario. IET Renew. Power Gener. 2021, 15, 1116–1132. [Google Scholar] [CrossRef]
- Lee, D.J.; Wang, L. Small-Signal Stability Analysis of an Autonomous Hybrid Renewable Energy Power Generation/Energy Storage System Part I: Time-Domain Simulations. IEEE Trans. Energy Convers. 2008, 23, 311–320. [Google Scholar] [CrossRef]
- Zhao, P.; Suryanarayanan, S.; Simoes, M.G. An Energy Management System for Building Structures Using a Multi-Agent Decision-Making Control Methodology. IEEE Trans. Ind. Appl. 2013, 49, 322–330. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Emami-Naeini, A. Feedback Control of Dynamic Systems, 5th ed.; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2006. [Google Scholar]
- Jordehi, A.R.; Javadi, M.S.; Catalão, J.P. Optimal Placement of Battery Swap Stations in Microgrids with Micro Pumped Hydro Storage Systems, Photovoltaic, Wind and Geothermal Distributed Generators. Int. J. Electr. Power Energy Syst. 2021, 125, 106483. [Google Scholar] [CrossRef]
- Hu, X.; Wang, B.; Yang, S.; Short, T.; Zhou, L. A Closed-Loop Control Strategy for Air Conditioning Loads to Participate in Demand Response. Energies 2015, 8, 8650–8681. [Google Scholar] [CrossRef]
- Kim, Y.J.; Norford, L.K.; Kirtley, J.L. Modeling and Analysis of a Variable Speed Heat Pump for Frequency Regulation through Direct Load Control. IEEE Trans. Power Syst. 2015, 30, 397–408. [Google Scholar] [CrossRef]
- Pathak, N.; Hu, Z. Hybrid-Peak-Area-Based Performance Index Criteria for AGC of Multi-Area Power Systems. IEEE Trans. Ind. Inf. 2019, 15, 5792–5802. [Google Scholar] [CrossRef]
- Yashiki, T.; Nagafuchi, N. Heat Pump Power Generation System. European Patent EP2482002A1, 1 August 2012. [Google Scholar]
- Babu, N.R.; Saikia, L.C. Automatic Generation Control of a Solar Thermal and Dish-Stirling Solar Thermal System Integrated Multi-Area System Incorporating Accurate HVDC Link Model Using Crow Search Algorithm Optimised FOPI Minus FODF Controller. IET Renew. Power Gener. 2019, 13, 2221–2231. [Google Scholar] [CrossRef]
- Zakula, T. Heat Pump Simulation Model and Optimal Variable-Speed Control for a Wide Range of Cooling Conditions. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2010. [Google Scholar]
- Shah, N.; Phadke, A.; Waide, P. Cooling the Planet: Opportunities for Deployment of Superefficient Room Air Conditioners Cooling the Planet: Opportunities for Deployment of Superefficient Room Air Conditioners; Lawrence Berkeley National Laboratory: Berkeley, CA, USA, 2013. [Google Scholar]
- Katipamula, S. Evaluation of Residential HVAC Control. ASHRAE Trans. 2006, 112, 535–546. [Google Scholar]
- Parshin, M.; Majidi, M.; Ibanez, F.; Pozo, D. On the Use of Thermostatically Controlled Loads for Frequency Control. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Sariki, M.; Shankar, R. Optimal CC-2DOF(PI)-PDF Controller for LFC of Restructured Multi-Area Power System with IES-Based Modified HVDC Tie-Line and Electric Vehicles. Eng. Sci. Technol. Int. J. 2022, 32, 101058. [Google Scholar] [CrossRef]
- Gupta, N.K.; Kar, M.K.; Singh, A.K. Design of a 2-DOF-PID Controller Using an Improved Sine–Cosine Algorithm for Load Frequency Control of a Three-Area System with Nonlinearities. Prot. Control. Mod. Power Syst. 2022, 7, 33. [Google Scholar] [CrossRef]
- Alyasseri, Z.A.A.; Khader, A.T.; Al-Betar, M.A.; Awadallah, M.A.; Yang, X.S. Variants of the Flower Pollination Algorithm: A Review. Stud. Comput. Intell. 2018, 744, 91–118. [Google Scholar] [CrossRef]
- Askarzadeh, A. A Novel Metaheuristic Method for Solving Constrained Engineering Optimization Problems: Crow Search Algorithm. Comput. Struct. 2016, 169, 1–12. [Google Scholar] [CrossRef]
- Mohammadi, F.; Abdi, H. A Modified Crow Search Algorithm (MCSA) for Solving Economic Load Dispatch Problem. Appl. Soft Comput. J. 2018, 71, 51–65. [Google Scholar] [CrossRef]
- Hussain, I.; Das, D.C.; Sinha, N.; Latif, A.; Suhail Hussain, S.M.; Ustun, T.S. Performance Assessment of an Islanded Hybrid Power System with Different Storage Combinations Using an FPA-Tuned Two-Degree-of-Freedom (2DOF) Controller. Energies 2020, 13, 5610. [Google Scholar] [CrossRef]
- Hongesombut, K.; Keteruksa, R. Fractional Order Based on a Flower Pollination Algorithm PID Controller and Virtual Inertia Control for Microgrid Frequency Stabilization. Electr. Power Syst. Res. 2023, 220, 109381. [Google Scholar] [CrossRef]
- Hussain, I.; Das, D.C.; Latif, A.; Sinha, N.; Hussain, S.M.S.; Ustun, T.S. Active Power Control of Autonomous Hybrid Power System Using Two Degree of Freedom PID Controller. Energy Rep. 2022, 8, 973–981. [Google Scholar] [CrossRef]
- Bhuyan, M.; Chandra Das, D.; Kumar Barik, A. Combined Voltage and Frequency Response in a Solar Thermal System with Thermostatically Controlled Loads in an Isolated Hybrid Microgrid Scheme. Int. J. Sustain. Energy 2022, 41, 2020–2043. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values (p.u.) |
|---|---|
| KPV, τPV [14] | 1, 1.8 |
| KWTS, τWTS [14] | 1, 1.5 |
| KDSTS, τDSTS [43] | 1, 0.5 |
| KFC, τFC [44] | 1, 0.1 |
| kGen, τGen,1, τGen,2, τgov, τTur [11] | 0.25, 0.1, 0.2, 0.1, 0.3 |
| KESD, τESD [45] | −0.003, 1 |
| State of charge (SOC) [45] | With ideal conditions |
| KTH, TTH [46] | 5, 5.5 |
| KTcom, TTcom [47] | 1, 3 |
| a0, a1, a2, b0, b1 and b2 [48] | 0.37, 0.01, 0.43, 0.00108, 0.017, 1 |
| KE, TE [49] | 1, 0.8 |
| J, B [49] | 1, 0.3 |
| M, D [45] | 0.2, 0.3 |
| PICs | bj | KPj | KIj | KPj | KDj | Nj | ȠPIC |
|---|---|---|---|---|---|---|---|
| IAE | 0.193 | 0.450 | 0.926 | 0.831 | 0.496 | 10.448 | 0.000131801 |
| ITAE | 0.091 | 0.245 | 0.273 | 0.119 | 0.734 | 19.230 | 0.000085462 |
| ITSE | 0.934 | 0.401 | 0.946 | 0.603 | 0.650 | 29.805 | 0.0000802926 |
| ISE | 0.549 | 0.473 | 0.703 | 0.917 | 0.129 | 15.975 | 0.0000575913 |
| Response Type | Settling Time (s) | Peak Overshoot (p.u.) ⨯ 10−3 | First Undershoot (p.u.) ⨯ 10−3 |
|---|---|---|---|
| PICs | ∆f1 | ∆f1 | ∆f1 |
| HPA-IAE | 101.15 | 0.265 | - |
| HPA-ITAE | 61.15 | 0.255 | 0.013 |
| HPA-ITSE | 44.23 | 0.152 | −0.047 |
| HPA-ISE | 21.95 | −0.008 | −0.106 |
| Algorithms | Time of Execution for 100 Runs | Mean | Max | Best | Standard Deviation |
|---|---|---|---|---|---|
| FPA [62] | 39 min | 14.5483 | 28.659 | 0.184418 | 7.8278 |
| CSA [60] | 28 min | 0.5727 | 1.225 | 0.000192 | 0.3548 |
| mCSA | 22 min | 0.0000578 | 0.0000585 | 0.000057 | 0.000000415 |
| Algorithms | bj | KPj | KIj | KPj | KDj | Fj | ηISE |
|---|---|---|---|---|---|---|---|
| FPA [62] | 0.887 | 0.802 | 0.088 | 0.058 | 0.504 | 25.673 | 0.184418 |
| CSA [60] | 0.481 | 0.331 | 0.561 | 0.872 | 0.917 | 29.360 | 0.000192 |
| mCSA | 0.549 | 0.473 | 0.703 | 0.917 | 0.129 | 15.975 | 0.000057 |
| Deviation in µG Power (∆Pg) | Deviation in Load Frequency (∆fL) | % Improvement from Initial Peaks | |||||
|---|---|---|---|---|---|---|---|
| Controllers | Settling Time (s) | Magnitude of Peak Overshoot | Magnitude of Peak Undershoot (−ve) | Settling Time (s) | Magnitude of Peak Overshoot | Magnitude of Peak Undershoot (−ve) | |
| FPA [62] | 36.2210 | 0.1521 | −0.0125 | 89.25 | 0.2705 | −0.0935 | 6.69% |
| CSA [60] | 29.0051 | 0.05829 | −0.02256 | 29.31 | 0.2471 | - | 9.03% |
| mCSA | 25.7048 | 0.0015 | 0.00062 | 21.95 | - | −0.106 | 27.22% |
| Controllers | mCSA Optimized Controller Parameters | ƞISE | |||||
|---|---|---|---|---|---|---|---|
| FOPID [63] | KPj = 0.575 | KIj = 0.351 | KDj = 0.864 | λ j = 0.506 | βj = 0.920 | 0.068513 | |
| 2-DOF with PID [64] | bj = 0.908 | KPj = 0.192 | KIj = 0.131 | KDj = 0.577 | N = 53.572 | 0.009563 | |
| PI-TID [65] | KP = 0.691 | KI = 0.357 | KT = 63.961 | KI = 0.757 | KD = 0.789 | 0.004956 | |
| 2-DOF (PI) and PDF | bj = 0.549 | KPj = 0.473 | KIj = 0.703 | KPj = 0.917 | KDj = 0.129 | Fj = 15.975 | 0.000057 |
| Deviation in µG Power (∆Pg) | Deviation in Load Frequency (∆fL) | % Improvement from Initial Peaks | ||||||
|---|---|---|---|---|---|---|---|---|
| Controllers | Settling Time (s) | Magnitude of Peak Overshoot | Magnitude of Peak Undershoot (−ve) | Settling Time (s) | Magnitude of Peak Overshoot | Magnitude of Peak Undershoot (−ve) | No. of Oscillations | |
| FOPID [63] | 88 | 0.0024 | 0.0015 | 39.54 | 0.27 | 0.08 | 3 | 8.26% |
| 2-DOF with PID [64] | 47.25 | 0.0019 | 0.0007 | 37.04 | 0.25 | 0.09 | 2 | 16.82% |
| PI-TID [65] | 38.41 | 0.0017 | 0 | 32.79 | 0.21 | 0.07 | 4 | 23.74% |
| 2-DOF (PI) and PDF | 25.7048 | 0.0015 | 0.00062 | 21.95 | −0.008 | 0.106 | 1 | 27.22% |
| Conditions | Case I | Case II | Case III |
|---|---|---|---|
| Change in the input of generation units | |||
| Sudden change in demand | - | ||
| DR management |
| Deviation in µG Power (∆Pg) | Deviation in Load Frequency (∆fL) | |||||
|---|---|---|---|---|---|---|
| Case I | Case II | Case III | Case I | Case II | Case III | |
| Settling Time (s) | 21.02 | 19.67 | 14.64 | 19.16 | 18.32 | 12.38 |
| Magnitude of Peak Overshoot | 0.00967 | 0.00738 | 0.00561 | 0.00116 | 0.00110 | 0.000562 |
| Magnitude of Peak Undershoot (−ve) | −0.00073 | −0.000504 | −0.000367 | −0.000574 | −0.00086 | −0.00036 |
| Scenario | Cases | Controller Values | Net ISE | |||||
|---|---|---|---|---|---|---|---|---|
| bj | KPj | KIj | KPj | KDj | Fj | ηPI | ||
| Scenario 4 | With Case I | 0.762 | 0.142 | 0.897 | 0.112 | 0.513 | 27.989 | 0.0000067537 |
| With Case II | 0.254 | 0.587 | 0.997 | 0.463 | 0.547 | 5.919 | 0.0000070596 | |
| With Case III | 0.954 | 0.548 | 0.548 | 0.505 | 0.803 | 24.975 | 0.00000160984 | |
| Scenario 5 | With +20% deviation in M | 0.543 | 0.293 | 0.692 | 0.562 | 0.012 | 9.326 | 0.00000160596 |
| With +20% deviation in D | 0.908 | 0.162 | 0.878 | 0.669 | 0.839 | 33.81 | 0.00000160810 | |
| With -20% deviation in M | 0.991 | 0.830 | 1.671 | 0.892 | 0.921 | 28.669 | 0.00000161058 | |
| With -20% deviation in D | 0.438 | 0.155 | 0.978 | 0.654 | 0.845 | 14.059 | 0.00000168952 | |
| Response Type | Nominal Condition | With +20% Deviation in M | With +20% Deviation in D | With −20% Deviation in M | With −20% Deviation in D |
|---|---|---|---|---|---|
| Settling Time (s) | 12.38 | 11.80 | 12.18 | 11.87 | 12.61 |
| Magnitude of Peak Overshoot | 0.000562 | 0.000549 | 0.000617 | 0.000547 | 0.00049 |
| Magnitude of Peak Undershoot (−ve) | −0.00036 | −0.00023 | −0.00023 | 0.00023 | −0.00022 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bal, T.; Ray, S.; Sinha, N.; Devarapalli, R.; Knypiński, Ł. Integrating Demand Response for Enhanced Load Frequency Control in Micro-Grids with Heating, Ventilation and Air-Conditioning Systems. Energies 2023, 16, 5767. https://doi.org/10.3390/en16155767
Bal T, Ray S, Sinha N, Devarapalli R, Knypiński Ł. Integrating Demand Response for Enhanced Load Frequency Control in Micro-Grids with Heating, Ventilation and Air-Conditioning Systems. Energies. 2023; 16(15):5767. https://doi.org/10.3390/en16155767
Chicago/Turabian StyleBal, Tanima, Saheli Ray, Nidul Sinha, Ramesh Devarapalli, and Łukasz Knypiński. 2023. "Integrating Demand Response for Enhanced Load Frequency Control in Micro-Grids with Heating, Ventilation and Air-Conditioning Systems" Energies 16, no. 15: 5767. https://doi.org/10.3390/en16155767
APA StyleBal, T., Ray, S., Sinha, N., Devarapalli, R., & Knypiński, Ł. (2023). Integrating Demand Response for Enhanced Load Frequency Control in Micro-Grids with Heating, Ventilation and Air-Conditioning Systems. Energies, 16(15), 5767. https://doi.org/10.3390/en16155767