

Discussion on Operational Stability of Governor Turbine Hydraulic System Considering Effect of Power System


Abstract
1. Introduction
2. Mathematical Models
2.1. Hydraulic System
2.2. Turbine Generator
2.3. Electric Load in Power System
2.4. Stability Analysis Based on State Equations
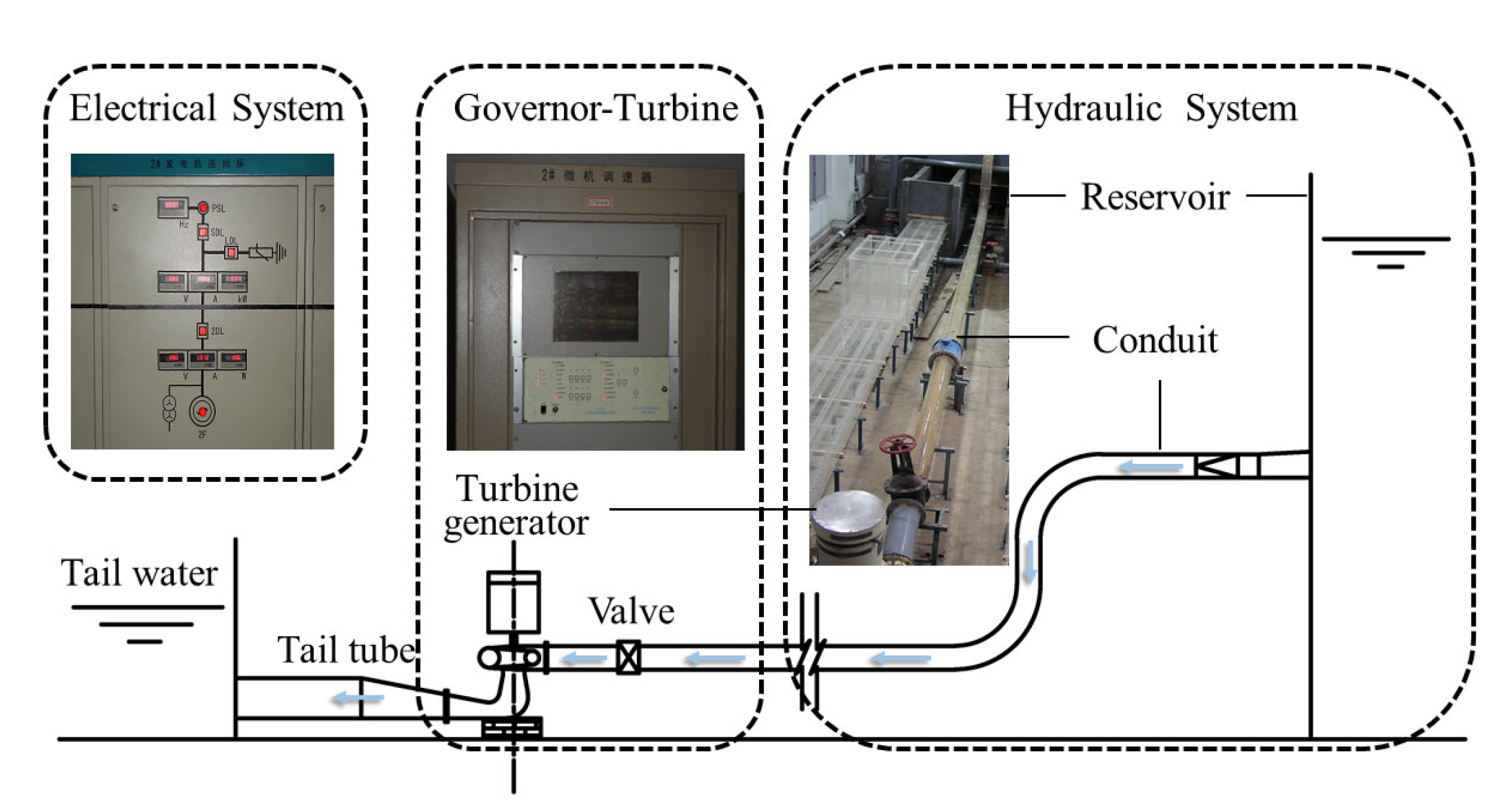
3. Experimental Research on System Stability
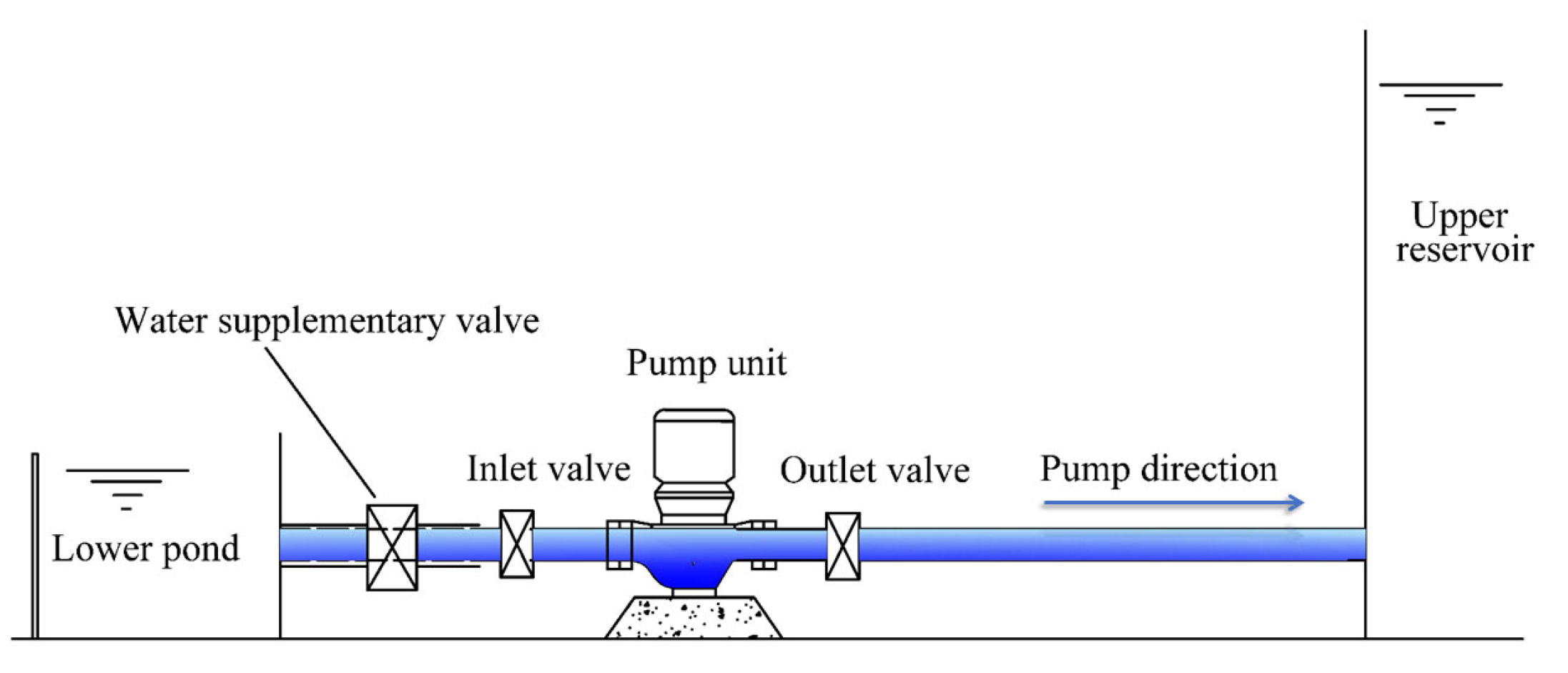
3.1. Experimental Setup
3.2. Electric Load Design
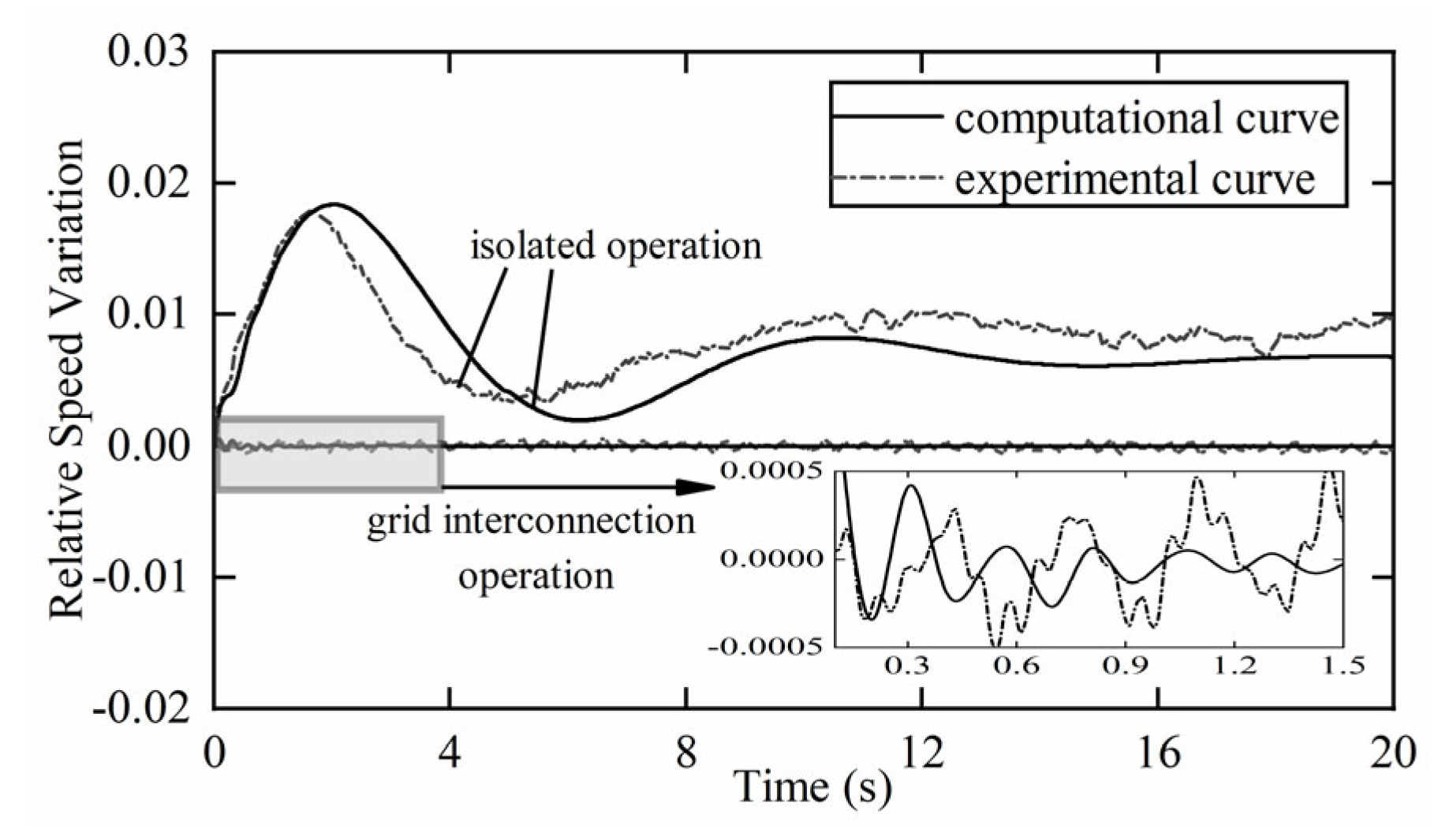
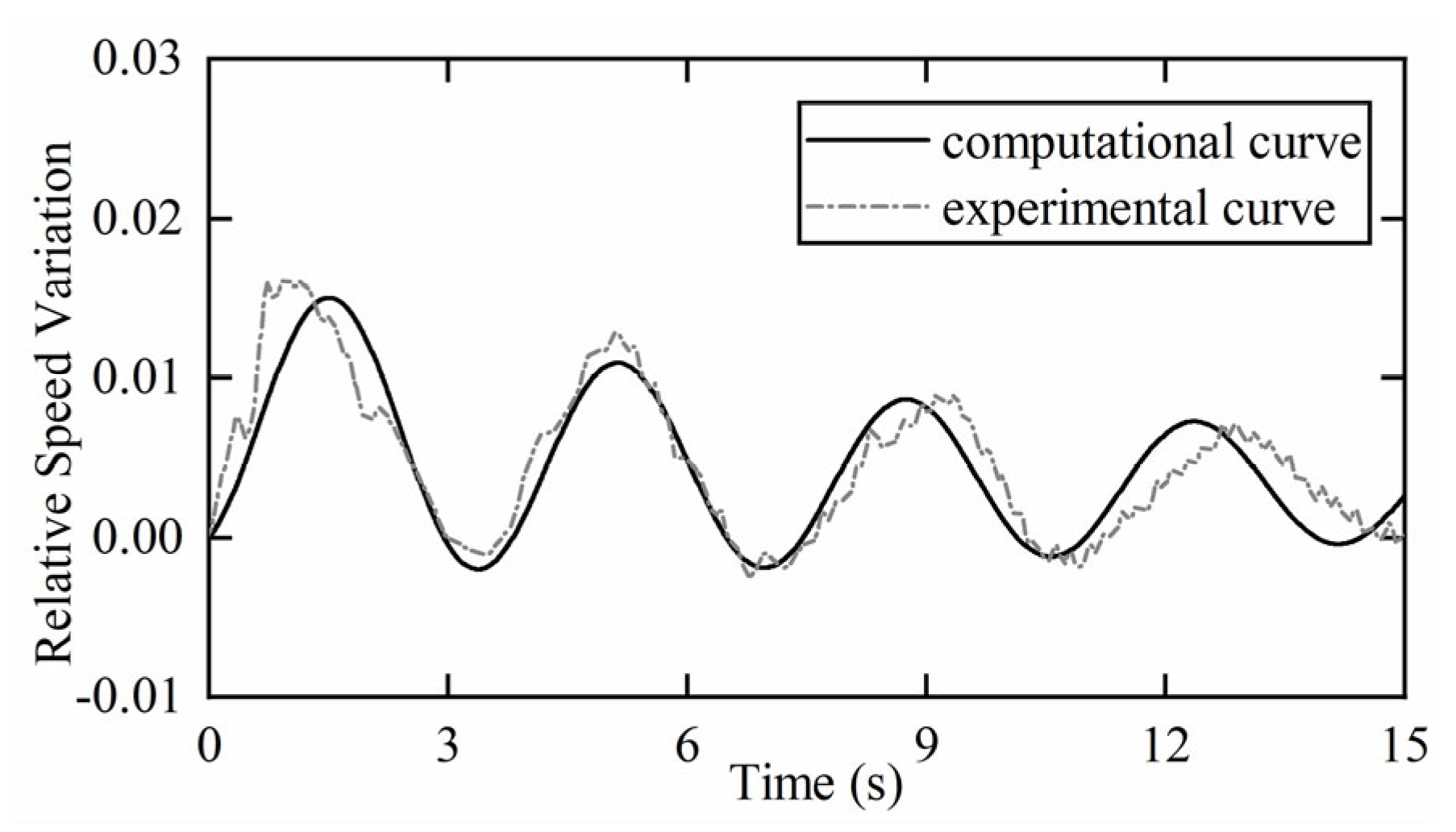
3.3. Computational Verification Based on the Simulated System
4. Numerical Analysis
4.1. Case Description for a Simple Hydropower System
4.2. Further Numerical Analysis with Different Loads
4.3. Effect of Pipe Flow Models on Low-Frequency Oscillation with Different Loads
4.4. Sensitivity Analysis of Pipe Length on Low-Frequency Oscillation with Different Loads
4.5. Discussion on Stability for Two-Unit System with Different Static Loads
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Data of Experimental Setup

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Speed nr/(r/min) | Rated Output Pr/KW | Rated Voltage Ur/V | Rated Current ir/A | Rated Frequency fr/Hz | Power Factor Cos φ | Rotary Inertia GD2/(t·m2) | ||
|---|---|---|---|---|---|---|---|---|
| 600 | 1.0 | 400 | 1.8 | 50 | 0.8 | 0.0056 | ||
| Exciting Voltage uf/V | Reactance xd (d-Axis) | Transient Reactance xd′ | Sub-Transient Reactance xd″ | Reactance xq (q-Axis) | Transient Reactance xq′ | Sub-Transient Reactance xq″ | ||
| 21 | 1.0222 | 0.2505 | 0.1336 | 0.6074 | 0.6074 | 0.1306 | ||
| Transient Open-Circuit Time Constant Td0′/s (d-Axis) | Sub-Transient Open-Circuit Time Constant Td0″/s (d-Axis) | Sub-Transient Open-Circuit Time Constant Tq0″/s (q-Axis) | ||||||
| 1.5~9.0 | 0.01~0.05 | 0.01~0.09 | ||||||
| Rated Head Hr/m | Rated Flow Qr/(m3/ s) | Rated Speed nr/(r/min) | Diameter D1/cm | Designed Output Psr/KW | Runaway Speed nf/(r/min) | Design Efficiency η/% |
|---|---|---|---|---|---|---|
| 3.2 | 0.045 | 600 | 20 cm | 1.15 | 1120 | 78.2 |
References
- Zhang, D.; Wang, J.; Lin, Y.; Si, Y.; Huang, C.; Yang, J.; Huang, B.; Li, W. Present situation and future prospect of renewable energy in China. Renew. Sustain. Energy Rev. 2017, 76, 865–871. [Google Scholar] [CrossRef]
- Chang, X.; Liu, X.; Zhou, W. Hydropower in China at present and its further development. Energy 2010, 35, 4400–4406. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, Q.; Ma, Z.; Wang, X. Transient vibration analysis of unit-plant structure for hydropower station in sudden load increasing process. Mech. Syst. Sig. Process. 2019, 120, 486–504. [Google Scholar] [CrossRef]
- Hamann, A.; Hug, G.; Rosinski, S. Real-Time Optimization of the Mid-Columbia Hydropower System. IEEE Trans. Power Syst. 2017, 32, 157–165. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, J.; Egusquiza, M.; Chen, D.; Li, F.; Behrens, P.; Egusquiza, E. A review of dynamic models and stability analysis for a hydro-turbine governing system. Renew. Sustain. Energy Rev. 2021, 144, 110880. [Google Scholar] [CrossRef]
- Xu, J.; Ni, T.; Zheng, B. Hydropower development trends from a technological paradigm perspective. Energy Convers. Manag. 2015, 90, 195–206. [Google Scholar] [CrossRef]
- Yu, X.; Zhang, J.; Fan, C.; Chen, S. Stability analysis of governor-turbine-hydraulic system by state space method and graph theory. Energy 2016, 114, 613–622. [Google Scholar] [CrossRef]
- Yu, X.D.; Zhou, Q.; Zhang, L.; Zhang, J. Hydraulic Disturbance in Multiturbine Hydraulically Coupled Systems of Hydropower Plants Caused by Load Variation. J. Hydraul. Eng. 2019, 145, 04018078. [Google Scholar] [CrossRef]
- Cassano, S.; Sossan, F. Model predictive control for a medium-head hydropower plant hybridized with battery energy storage to reduce penstock fatigue. Electr. Power Syst. Res. 2022, 213, 108545. [Google Scholar] [CrossRef]
- Reigstad, T.I.; Uhlen, K. Optimized Control of Variable Speed Hydropower for Provision of Fast Frequency Reserves. Electr. Power Syst. Res. 2020, 189, 106668. [Google Scholar] [CrossRef]
- Makarov, Y.V.; Maslennikov, V.A.; Hill, D.J. Revealing loads having the biggest influence on power system small disturbance stability. IEEE Trans. Power Syst. 1996, 11, 2018–2023. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill Professional: New York, NY, USA, 1994; pp. 377–417. [Google Scholar]
- Garmroodi, M.; Hill, D.J.; Verbic, G.; Ma, J. Impact of Load Dynamics on Electromechanical Oscillations of Power Systems. IEEE Trans. Power Syst. 2018, 33, 6611–6620. [Google Scholar] [CrossRef]
- Jiang, C.X.; Zhou, J.H.; Shi, P.; Huang, W.; Gan, D.Q. Ultra-low frequency oscillation analysis and robust fixed order control design. Int. J. Electr. Power Energy Syst. 2019, 104, 269–278. [Google Scholar] [CrossRef]
- Mo, W.; Chen, Y.; Chen, H.; Liu, Y.; Zhang, Y.; Hou, J.; Gao, Q.; Li, C. Analysis and Measures of Ultra-Low-Frequency Oscillations in a Large-Scale Hydropower Transmission System. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 6, 1077–1085. [Google Scholar] [CrossRef]
- Villegas Pico, H.; Mccalley, J.D.; Angel, A.; Leon, R.; Castrillon, N.J. Analysis of Very Low Frequency Oscillations in Hydro-Dominant Power Systems Using Multi-Unit Modeling. IEEE Trans. Power Syst. 2012, 27, 1906–1915. [Google Scholar] [CrossRef]
- Wang, G.; Zheng, X.; Guo, X.; Liang, X. Mechanism analysis and suppression method of ultra-low-frequency oscillations caused by hydropower units. Int. J. Electr. Power Energy Syst. 2018, 103, 102–114. [Google Scholar] [CrossRef]
- Li, Y.; Chiang, H.D.; Choi, B.K.; Chen, Y.T.; Huang, D.H.; Lauby, M.G. Load models for modeling dynamic behaviors of reactive loads: Evaluation and comparison. Int. J. Electr. Power Energy Syst. 2008, 30, 497–503. [Google Scholar] [CrossRef]
- Maslennikov, V.A.; Milanovic, J.V.; Ustinov, S.M. Robust ranking of loads by using sensitivity factors and limited number of points from a hyperspace of uncertain parameters. IEEE Trans. Power Syst. 2002, 22, 565–570. [Google Scholar] [CrossRef]
- Price, A.W.W.; Taylor, C.W.; Rogers, G.J. Bibliography on load models for power flow and dynamic performance simulation. IEEE Trans. Power Syst. 1995, 10, 523–538. [Google Scholar] [CrossRef]
- Yang, Y.; Zhao, S.Q. Load characteristics’ effect on low-frequency oscillation damping of power systems. Electr. Power Autom. Equip. 2003, 23, 13–16. [Google Scholar] [CrossRef]
- Kao, W.S. The effect of load models on unstable low-frequency oscillation damping in taipower system experience w/wo power system stabilizers. IEEE Trans. Power Syst. 2001, 16, 463–472. [Google Scholar] [CrossRef]
- Nomikos, B.M.; Vournas, C.D. Evaluation of motor effects on the electromechanical oscillations of multimachine systems. In Proceedings of the 2003 IEEE Bologna Power Tech Conference, Bologna, Italy, 23–26 June 2003. [Google Scholar] [CrossRef]
- Hiskens, I.A.; Milanovic, J.V. Load modelling in studies of power system damping. IEEE Trans. Power Syst. 1995, 10, 1781–1788. [Google Scholar] [CrossRef]
- Milanovic, J.V.; Hiskens, I.A. Effects of load dynamics on power system damping. IEEE Trans. Power Syst. 1995, 10, 1022–1028. [Google Scholar] [CrossRef]
- Yang, J.; Li, J.; Wang, D.; Chen, J.; Wu, R. Study on the physical simulation of transient process in conduits of hydropower stations. J. Hydroelectr. Eng. 2004, 23, 57–63. [Google Scholar]
- Zeng, W.; Yang, J.; Hu, J. Pumped storage system model and experimental investigations on S-induced issues during transients. Mech. Syst. Sig. Process. 2017, 90, 350–364. [Google Scholar] [CrossRef]
- Yang, W.; Yang, J.; Zeng, W.; Tang, R.; Hou, L.; Ma, A.; Zhao, Z.; Peng, Y. Experimental investigation of theoretical stability regions for ultra-low frequency oscillations of hydropower generating systems. Energy 2019, 186, 115816. [Google Scholar] [CrossRef]
- Zhou, J.; Chen, G. Effect Analysis of Load Characteristic on Operation Stability of Hydropower Stations. In Proceedings of the 2012 International Conference on Future Electrical Power and Energy Systems, Sanya, China, 21–22 February 2012. [Google Scholar] [CrossRef]
- Zhou, J.; Hu, M.; Cai, F.; Hu, R. Experimental Research on Stability of Hydro-Mechanical-Electrical System in Hydropower Station. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, New York, NY, USA, 28–30 March 2009. [Google Scholar] [CrossRef]
- Zhou, J.; Cai, F.; Wang, Y. New Elastic Model of Pipe Flow for Stability Analysis of the Governor-Turbine-Hydraulic System. J. Hydraul. Eng. 2011, 137, 1238–1247. [Google Scholar] [CrossRef]
- Zhou, J.X.; Mao, Y.T.; Shen, A.L.; Zhang, J. Modeling and stability investigation on the governor-turbine-hydraulic system with a ceiling-sloping tail tunnel. Renew. Energy 2023, 204, 812–822. [Google Scholar] [CrossRef]
- Jaeger, E.D.; Janssens, N. Hydro turbine model for system dynamic studies. IEEE Trans. Power Syst. 1994, 9, 1709–1715. [Google Scholar] [CrossRef]
- Hannett, L.N.; Feltes, J.W.; Fardanesh, B. Field tests to validate hydro turbine-governor model structure and parameters. IEEE Trans. Power Syst. 1994, 9, 1744–1751. [Google Scholar] [CrossRef]












| Load Model | ap | bp | 2 ap + bp | Low-Frequency Oscillation Mode | ||
|---|---|---|---|---|---|---|
| Td = 5.0 s, bt = 0.50 | Td = 5.0 s, bt = 0.32 | |||||
| Static load | Constant resistance | 1.0 | 0.0 | 2.0 | −0.4316 ± j12.94 | −0.4017 ± j12.94 |
| Constant current | 0.0 | 1.0 | 1.0 | −0.4005 ± j13.02 | −0.3723 ± j13.01 | |
| Constant output | 0.0 | 0.0 | 0.0 | −0.3697 ± j13.09 | −0.3431 ± j13.08 | |
| 0.6 | 0.2 | 1.4 | −0.4129 ± j12.99 | −0.3840 ± j12.98 | ||
| Dynamic load | −0.5599 ± j12.50 | −0.5198 ± j12.54 | ||||
| Flow Model | Static Load | Dynamic Load |
|---|---|---|
| Stiff model (zeroth-order) | −0.5411 ± j12.80 | −0.5036 ± j12.31 |
| First-order elastic model | −0.4316 ± j12.94 | −0.5599 ± j12.50 |
| Second-order elastic model | −0.4278 ± j12.95 | −0.5695 ± j12.50 |
| Third-order elastic model | −0.4264 ± j12.95 | −0.5735 ± j12.49 |
| Flow Model | 150 m Pipe | 250 m Pipe | 400 m Pipe |
|---|---|---|---|
| Stiff model (zeroth-order) | −0.5347 ± j12.80 | −0.5411 ± j12.80 | −0.5447 ± j12.80 |
| First-order elastic model | −0.5537 ± j12.79 | −0.4316 ± j12.94 | −0.5258 ± j12.80 |
| Second-order elastic model | −0.5571 ± j12.80 | −0.4278 ± j12.95 | −0.5483 ± j12.79 |
| Third-order elastic model | −0.5585 ± j12.80 | −0.4264 ± j12.95 | −0.5539 ± j12.79 |
| Oscillation Modes | Static Load (Constant Output) | Static Load (Constant Resistance) |
|---|---|---|
| Low-frequency oscillation | −0.9480 ± j6.834 | −0.9569 ± j6.838 |
| −0.8839 ± j6.693 | −1.1060 ± j5.471 | |
| Hydraulic oscillation | −0.005636 ± j3.322 | −0.005365 ± j3.322 |
| −0.005635 ± j6.643 | −0.005632 ± j6.643 | |
| −0.005627 ± j9.964 | −0.005637 ± j9.964 | |
| Water level oscillation | −0.008115 ± j0.5201 | −0.008112 ± j0.5202 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Li, C.; Mao, Y. Discussion on Operational Stability of Governor Turbine Hydraulic System Considering Effect of Power System. Energies 2023, 16, 4459. https://doi.org/10.3390/en16114459
Zhou J, Li C, Mao Y. Discussion on Operational Stability of Governor Turbine Hydraulic System Considering Effect of Power System. Energies. 2023; 16(11):4459. https://doi.org/10.3390/en16114459
Chicago/Turabian StyleZhou, Jianxu, Chaoqun Li, and Yutong Mao. 2023. "Discussion on Operational Stability of Governor Turbine Hydraulic System Considering Effect of Power System" Energies 16, no. 11: 4459. https://doi.org/10.3390/en16114459
APA StyleZhou, J., Li, C., & Mao, Y. (2023). Discussion on Operational Stability of Governor Turbine Hydraulic System Considering Effect of Power System. Energies, 16(11), 4459. https://doi.org/10.3390/en16114459