
A Deep Learning Method Based on Bidirectional WaveNet for Voltage Sag State Estimation via Limited Monitors in Power System


Abstract
:1. Introduction
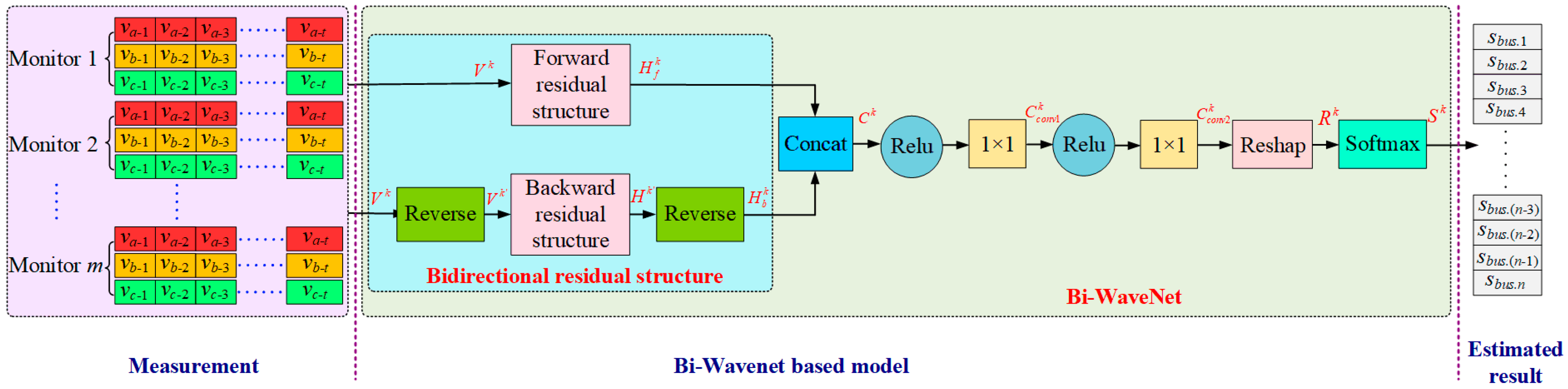
- A deep learning architecture via Bi-WaveNet was designed to explore the long-term and long-range temporal dependencies in both the forward and backward directions;
- Original measured voltages through limited monitors, without restructuring of the raw monitored data, can be directly used for feature extractions with high accuracy;
- Only with a single model, the VSSE results at multiple non-monitored buses can be simultaneously estimated;
- The effectiveness of the Bi-WaveNet-based algorithm was further compared with other methods including the one-way WaveNet-based method and the Bi-GRU-based method. The results illustrated that the Bi-WaveNet-based model could achieve the highest accuracy and quickest convergence speed.
2. Proposed Method
2.1. Problem Description
2.2. Reason for Choosing WaveNet
2.3. WaveNet and Bi-WaveNet
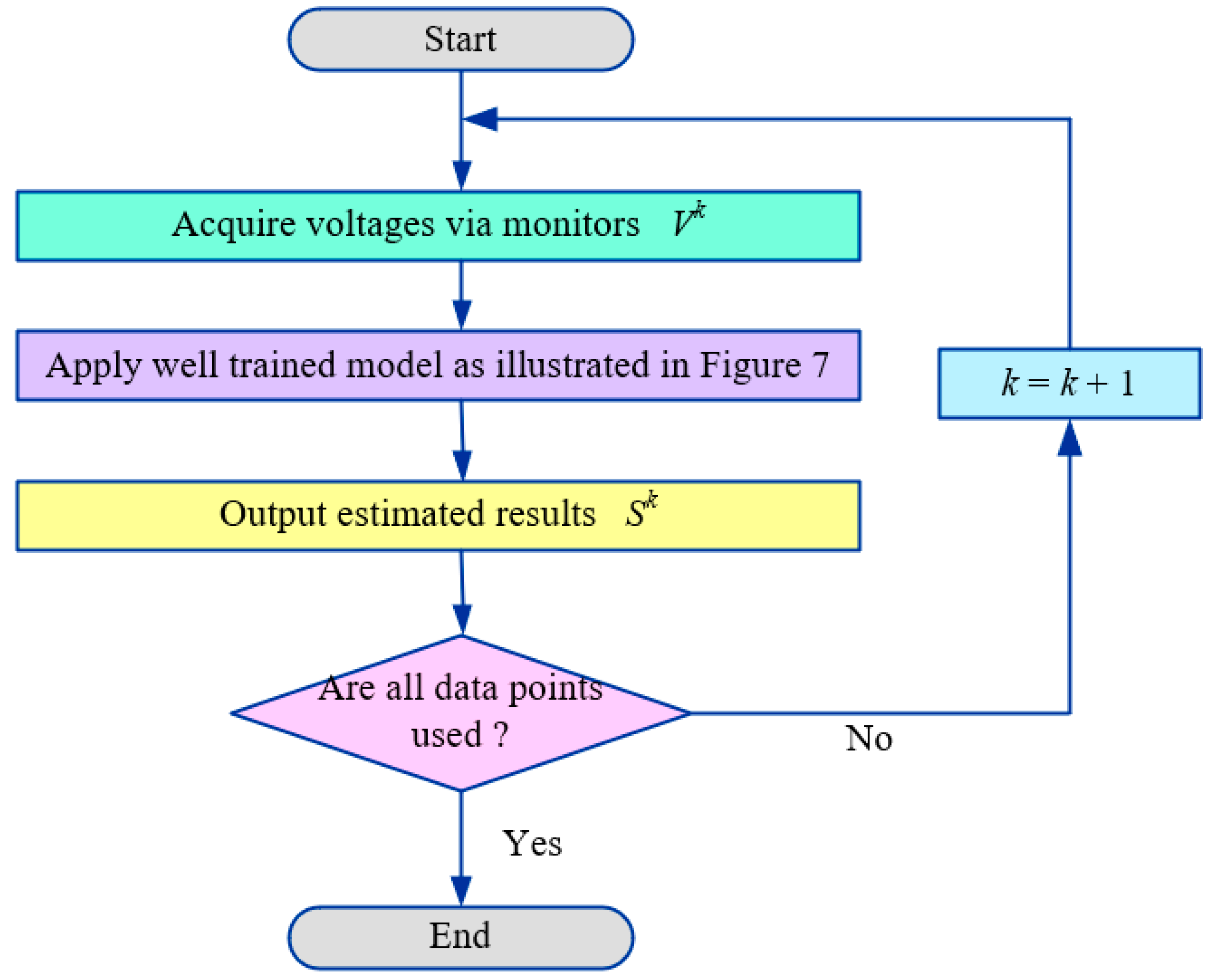
2.4. Proposed Bi-WaveNet Model for VSSE Solutions
3. Experimentation and Results
3.1. Data Set Description
3.2. Verification for Effectiveness of the Proposed Model
- (1)
- From Figure 10, the loss with the proposed Bi-WaveNet model was less than that of the model based on Bi-GRU and one-way WaveNet. Specifically, the minimum loss value of the Bi-WaveNet model could achieve 1 × 10−8, whereas, the minimum loss value of Bi-GRU model and one-way WaveNet could only achieve 5 × 10−4 and 1 × 10−5, respectively. This means that the deep relationship or function between the monitored voltage and VSSE results can be more accurately extracted by the Bi-WaveNet model, consequently obtaining higher accuracy for VSSE. The main reason for this result is that the Bi-WaveNet can process both forward and backward information;
- (2)
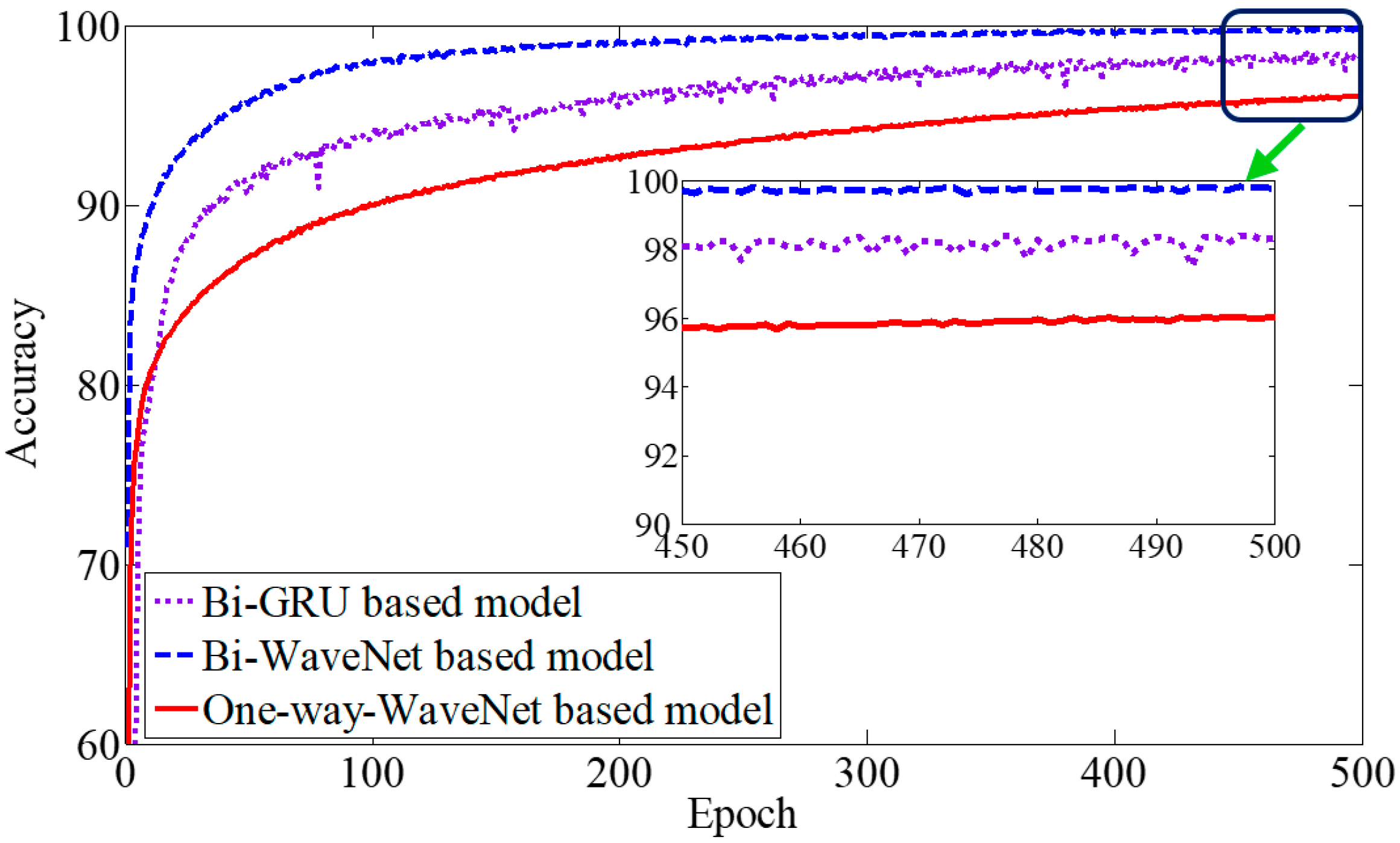
- The accuracy of the one-way WaveNet-based model (marked by the red line) was nearly 96%, approximately 4% lower than the Bi-WaveNet-based network (marked by the blue line). This is because the Bi-WaveNet-based network can learn input sequential data in both the forward and backward directions, leading to high accuracy.
- (3)
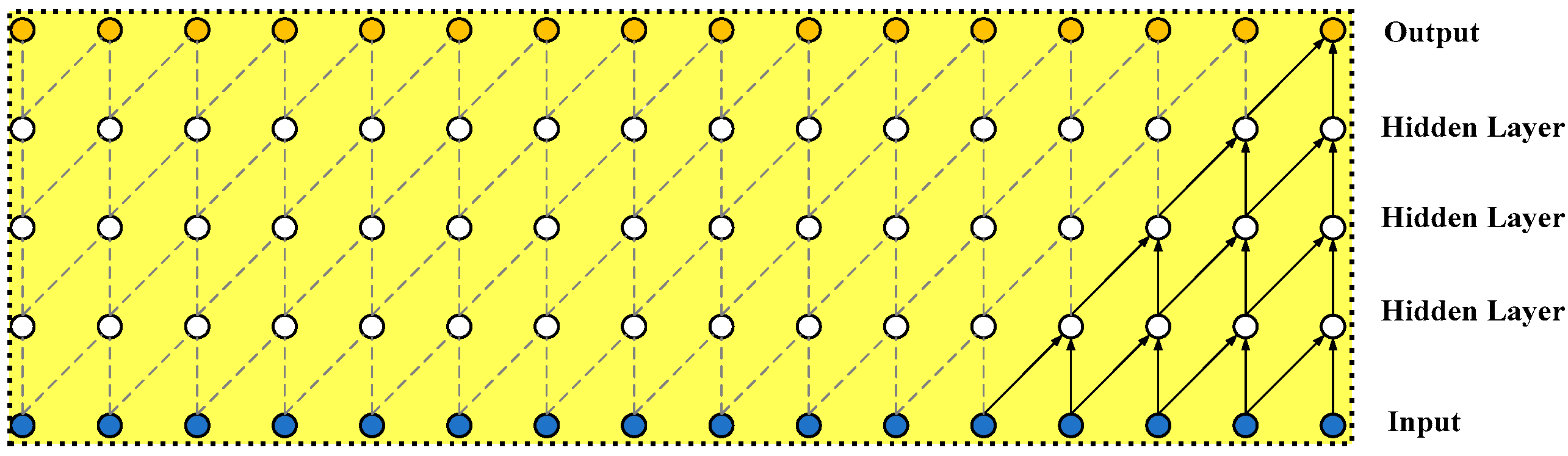
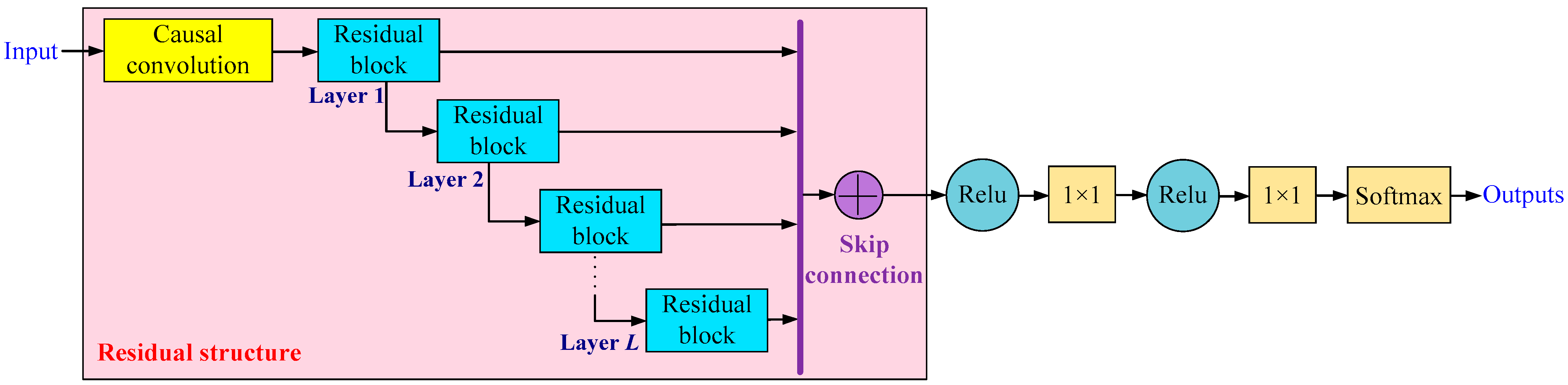
- The accuracy of the Bi-GRU-based model was nearly 98% (marked by the purple line), approximately 2% lower than the Bi-WaveNet-based network (marked by the blue line). This was due to the fact that the WaveNet network, based on causal convolutions (as illustrated in Figure 3) and dilated causal convolutions (as demonstrated in Figure 4), can exhibit very large receptive fields to deal with long-range temporal dependencies, resulting in high accuracy.
- (4)
- Compared with the Bi-GRU (marked by the purple line) and one-way WaveNet (marked by the red line), the convergence speed of the Bi-WaveNet-based model accelerated dramatically. This was because the proposed Bi-WaveNet consists of stacked dilated causal convolution layers, and each causal convolutional layer can process its input in parallel, making the proposed Bi-WaveNet avoid vanishing/exploding gradient problems efficiently, leading to the fastest convergence rate.
3.3. A Comparison among Different Monitor Placement
- (1)
- In general, along with increasing the number of monitors, the accuracy of the VSSE results improved sharply. The main reason lies in the fact that more monitors means redundant data and sufficient information;
- (2)
- However, once the number of monitors attains a certain value, the accuracy of the VSSE results improves slowly, even if the number further increases. Therefore, there should be a balance between installation costs, computational burden, accuracy, and complexity. Here, we chose the number of monitors to be four;
- (3)
- Both the number of monitors and the detailed allocation of them are equally important. For the allocation of 18, 24, and 25 and the allocation of 15, 22, and 25, different allocations with the same number of monitors produced different accuracies in the VSSE results. Whereas, for the placement 2, 15, 16, 21, and 25 and the placement 2, 15, 18, 21, and 25, it was observed that different allocations with the same number of monitors achieved similar accuracies in the VSSE results. This is because the detailed placement of monitors should be distributed to ensure the observability of the whole power network;
- (4)
- For monitor placement 18, 24, and 25, the accuracy of the VSSE results was unsatisfactory. The reason lies in the fact that this monitor placement could not ensure the whole system’s observability, resulting in missing data and insufficient information.
4. Discussion
- (1)
- Since abundant high-quality data may be a little difficult to be collected, deep learning methodology depending on small amounts of data will be studied in our future work;
- (2)
- The monitor placement is important for satisfactory VSSE results. In the further studies, efficient monitor placement, including the number of monitors and their best allocations, will be considered.
5. Conclusions
- (1)
- Only by using measured original voltages via limited monitors, the proposed deep learning architecture via bidirectional WaveNet can simultaneously estimate voltage sag states at multiple non-monitored buses without any prior conditions;
- (2)
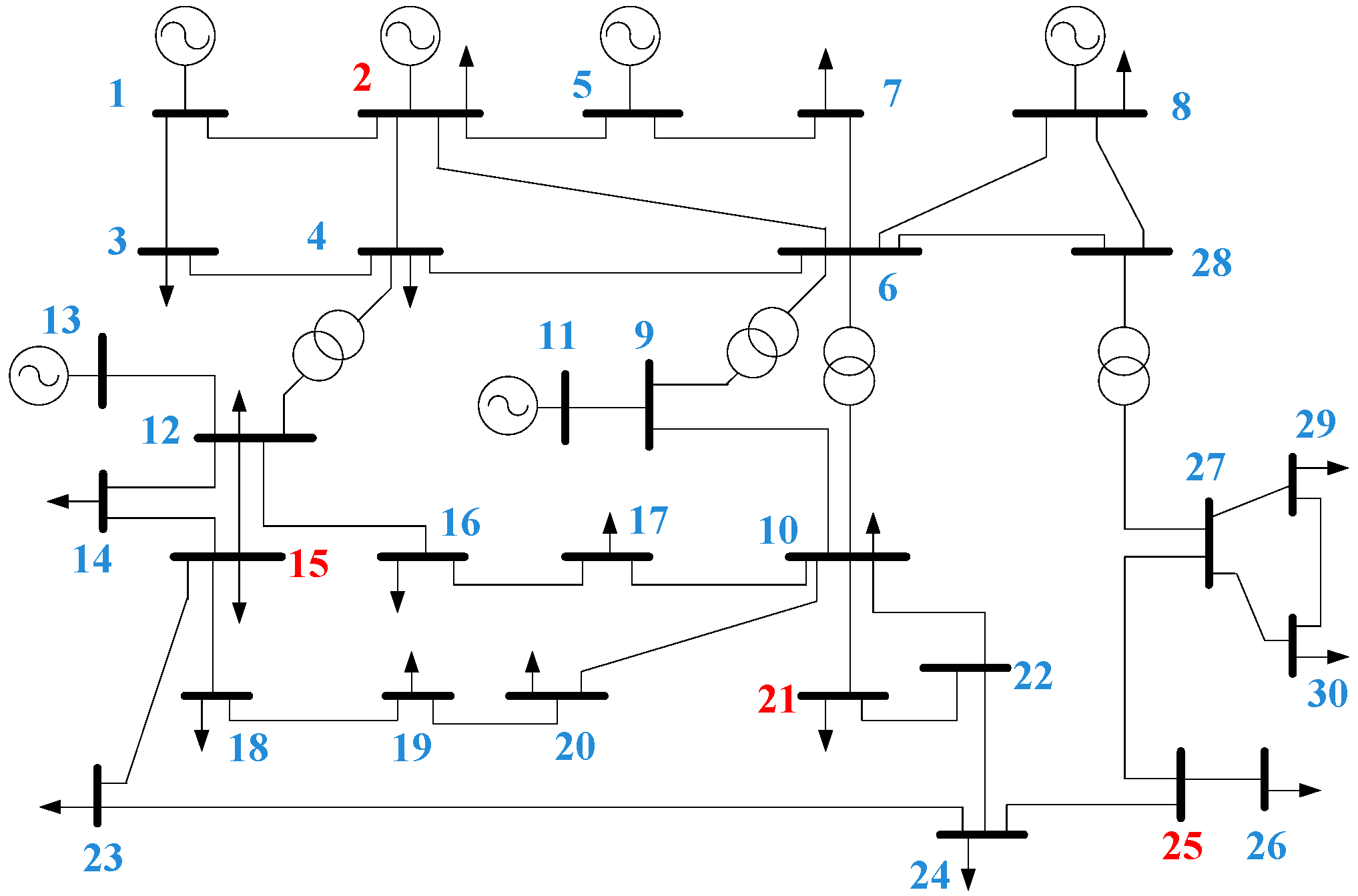
- The experiments on IEEE 30-bus system confirmed that the performance of the presented model was satisfactory. The accuracy of the VSSE result was over 99.83%;
- (3)
- A comparison among different models, including a bidirectional GRU-based model, a one-way-WaveNet-based model, and a bidirectional WaveNet-based model, was also conducted. The results indicate that the proposed bidirectional WaveNet-based model achieved the highest accuracy and quickest convergence speed.
- (4)
- A comparison among different monitor placements was demonstrated. It illustrated that the optimal number of monitors and their best placement to ensure observability of the power network is a basic requirement to achieve satisfactory accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hasan, S.; Muttaqi, K.M.; Sutanto, D.; Bouzerdoum, A. Calculation of the Voltage Sag Recovery Point-on-Wave and Sag Duration Using System Parameters. IEEE Trans. Ind. Appl. 2020, 56, 4588–4601. [Google Scholar] [CrossRef]
- Torres, A.P.; Roncero-Sanchez, P.; Batlle, V.F. A Two Degrees of Freedom Resonant Control Scheme for Voltage-Sag Compensation in Dynamic Voltage Restorers. IEEE Trans. Power Electron. 2018, 33, 4852–4867. [Google Scholar] [CrossRef]
- Ye, G.; Xiang, Y.; Nijhuis, M.; Cuk, V.; Cobben, J.F.G. Bayesian-Inference-Based Voltage Dip State Estimation. IEEE Trans. Instrum. Meas. 2017, 66, 2977–2987. [Google Scholar] [CrossRef]
- Di, F.; Lijun, T.; Yu, C. Voltage sag state estimation based on Hybrid Particle Swarm Optimization algorithm. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015. [Google Scholar]
- Blanco-Solano, J.; Petit-Suárez, J.F.; Ordóñez-Plata, G.; Kagan, N.; Almeida, C. Voltage Sag State Estimation using Compressive Sensing in Power Systems. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 508–512. [Google Scholar]
- Wang, Y.; Li, S.-Y.; Xiao, X. Estimation Method of Voltage Sag Frequency Considering Transformer Energization. IEEE Trans. Power Deliv. 2020, 36, 3404–3413. [Google Scholar] [CrossRef]
- Di Mambro, E.; Caramia, P.; Varilone, P.; Verde, P. Voltage sag estimation of real transmission systems for faults along the lines. In Proceedings of the 2018 18th International Conference on Harmonics and Quality of Power (ICHQP), Ljubljana, Slovenia, 13–16 May 2018. [Google Scholar]
- Cruz, I.B.N.C.; Lavega, A.P.; Orillaza, J.R.C. Overview of methods for voltage sag performance estimation. In Proceedings of the 2016 17th International Conference on Harmonics and Quality of Power (ICHQP), Belo Horizonte, Brazil, 16–19 October 2016; pp. 508–512. [Google Scholar]
- Zambrano, X.; Hernández, A.; Izzeddine, M.; de Castro, R.M. Estimation of voltage sags from a limited set of monitors in power systems. IEEE Trans. Power Deliv. 2017, 32, 656–665. [Google Scholar] [CrossRef]
- Liao, H.; Milanović, J.V.; Rodrigues, M.; Shenfield, A. Voltage sag estimation in sparsely monitored power systems based on deep learning and system area mapping. IEEE Trans. Power Deliv. 2018, 33, 3162–3172. [Google Scholar] [CrossRef]
- Espinosa-Juarez, E.; Espinoza-Tinoco, J.R.; Hernandez, A. Neural networks applied to solve the voltage sag state estimation problem: An approach based on the fault positions concept. In Proceedings of the 2009 Electronics, Robotics and Automotive Mechanics Conference (CERMA), Cuernavaca, Mexico, 22–25 September 2009; pp. 88–93. [Google Scholar]
- Lv, G.; Chu, C.; Zang, Y.; Chen, G. Voltage sag source location estimation based on optimized configuration of monitoring points. CPSS Trans. Power Electron. Appl. 2021, 6, 242–250. [Google Scholar] [CrossRef]
- IEEE Std 1668–2017 (Revision of IEEE Std 1668–2014); IEEE Recommended Practice for Voltage Sag and Short Interruption Ride-Through Testing for End-Use Electrical Equipment Rated Less than 1000 V. IEEE: Manhattan, NY, USA, 2017. [CrossRef]
- Deng, Y.; Liu, X.; Jia, R.; Huang, Q.; Xiao, G.; Wang, P. Sag source location and type recognition via attention-based independently recurrent neural network. J. Mod. Power Syst. Clean Energy 2021, 9, 1018–1031. [Google Scholar] [CrossRef]
- Ma, J.; Liu, H.; Peng, C.; Qiu, T. Unauthorized broadcasting identification: A deep LSTM recurrent learning approach. IEEE Trans. Instrum. Meas. 2020, 69, 5981–5983. [Google Scholar] [CrossRef]
- Zhao, R.; Wang, D.; Yan, R.; Shen, F.; Wang, J. Machine Health Monitoring using Local Feature-based Gated Recurrent Unit Networks. IEEE Trans. Ind. Electron. 2018, 65, 1539–1548. [Google Scholar] [CrossRef]
- Yuan, X.; Li, L.; Shardt, Y.A.W.; Wang, Y.; Yang, C. Deep learning with spatiotemporal attention-based LSTM for industrial soft sensor model development. IEEE Trans. Ind. Electron. 2021, 68, 4404–4414. [Google Scholar] [CrossRef]
- Li, J.; Yang, C.; Yuxuan, L.; Xie, S. A context-aware enhanced GRU network with feature-temporal attention for prediction of silicon content in hot metal. IEEE Trans. Ind. Inform. 2021. [Google Scholar] [CrossRef]
- Hu, C.; Ou, T.; Zhu, Y.; Zhu, L. GRU-Type LARC Strategy for Precision Motion Control with Accurate Tracking Error Prediction. IEEE Trans. Ind. Electron. 2021, 68, 812–820. [Google Scholar] [CrossRef]
- Ariav, I.; Cohen, I. An end-to-end multimodal voice activity detection using WaveNet encoder and residual networks. IEEE J. Sel. Top. Signal Process. 2019, 13, 265–274. [Google Scholar] [CrossRef]
- Juvela, L.; Bollepalli, B.; Tsiaras, V.; Alku, P. GlotNet—A raw waveform model for the glottal excitation in statistical parametric speech synthesis. IEEE/ACM Trans. Audio Speech Lang. Process. 2019, 27, 1019–1030. [Google Scholar] [CrossRef]
- Sisman, B.; Zhang, M.; Li, H. Group sparse representation with waveNet vocoder adaptation for spectrum and prosody conversion. IEEE/ACM Trans. Audio Speech Lang. Process. 2019, 27, 1085–1097. [Google Scholar] [CrossRef]
- Deng, Y.; Wang, L.; Jia, H.; Tong, X.; Li, F. A sequence-to-sequence deep learning architecture based on bidirectional GRU for type recognition and time location of combined power quality disturbance. IEEE Trans. Ind. Inform. 2019, 15, 4481–4493. [Google Scholar] [CrossRef]
- Jiang, H.; Xu, Y.; Liu, Z.; Ma, N.; Lu, W. A BPSO-based method for optimal voltage sag monitor placement considering uncertainties of transition resistance. IEEE Access 2020, 8, 80382–80394. [Google Scholar] [CrossRef]
- Géron, A. Hands-on Machine Learning with Scikit-Learn and TensorFlow; O’Reilly Media, Inc.: Newton, MA, USA, 2017. [Google Scholar]
- Hernández, A.; Milanović, J.V. Efficient Monitor Placement and Voltage Sag Estimation Using System Impedance Matrix. In Proceedings of the 2019 IEEE Milan PowerTech, Milano, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monitor Placement | Number of Monitors | Accuracy of VSSE Result (%) |
|---|---|---|
| 18, 24, 25 | 3 | 63.21 |
| 15, 22, 25 | 3 | 75.90 |
| 15, 22, 27 | 3 | 86.33 |
| 2, 15, 21, 25 | 4 | 99.83 |
| 2, 15, 18, 21, 25 | 5 | 99.87 |
| 2, 15, 16, 21, 25 | 5 | 99.91 |
| 2, 5, 15, 16, 21, 25 | 6 | 99.95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Y.; Wang, L.; Jia, H.; Zhang, X.; Tong, X. A Deep Learning Method Based on Bidirectional WaveNet for Voltage Sag State Estimation via Limited Monitors in Power System. Energies 2022, 15, 2273. https://doi.org/10.3390/en15062273
Deng Y, Wang L, Jia H, Zhang X, Tong X. A Deep Learning Method Based on Bidirectional WaveNet for Voltage Sag State Estimation via Limited Monitors in Power System. Energies. 2022; 15(6):2273. https://doi.org/10.3390/en15062273
Chicago/Turabian StyleDeng, Yaping, Lu Wang, Hao Jia, Xiaohui Zhang, and Xiangqian Tong. 2022. "A Deep Learning Method Based on Bidirectional WaveNet for Voltage Sag State Estimation via Limited Monitors in Power System" Energies 15, no. 6: 2273. https://doi.org/10.3390/en15062273
APA StyleDeng, Y., Wang, L., Jia, H., Zhang, X., & Tong, X. (2022). A Deep Learning Method Based on Bidirectional WaveNet for Voltage Sag State Estimation via Limited Monitors in Power System. Energies, 15(6), 2273. https://doi.org/10.3390/en15062273