
A Sensitivity-Based Three-Phase Weather-Dependent Power Flow Algorithm for Networks with Local Voltage Controllers




Abstract
:1. Introduction
1.1. Challenges of Incorporating LVCs in Power Flow Computation
1.2. Literature Review
1.3. Technical Contribution of This Paper
- In contrast to the existing literature, the proposed method is a three-phase algorithm, which considers the network’s unbalances. Moreover, the proposed power flow method accurately simulates various DG operational modes.
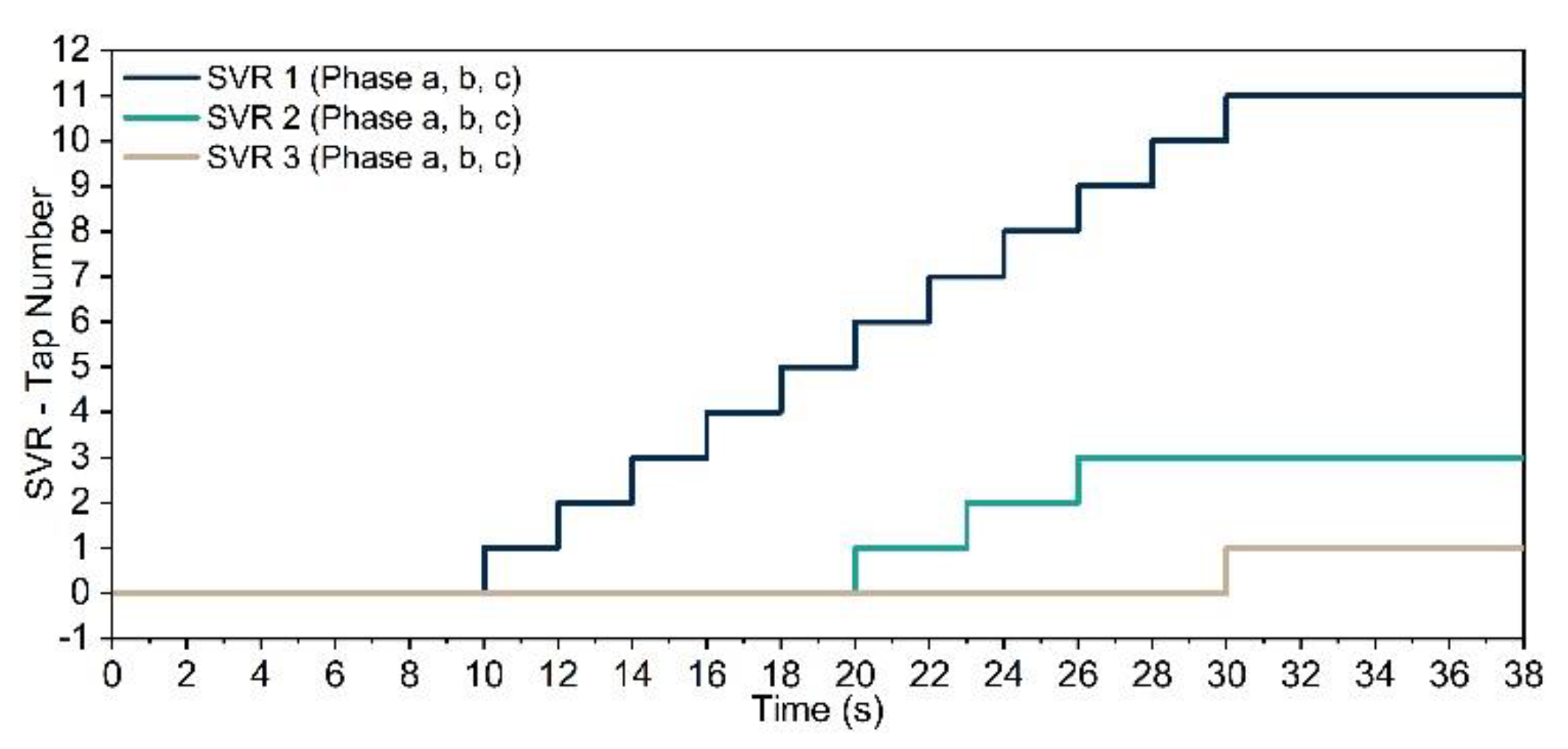
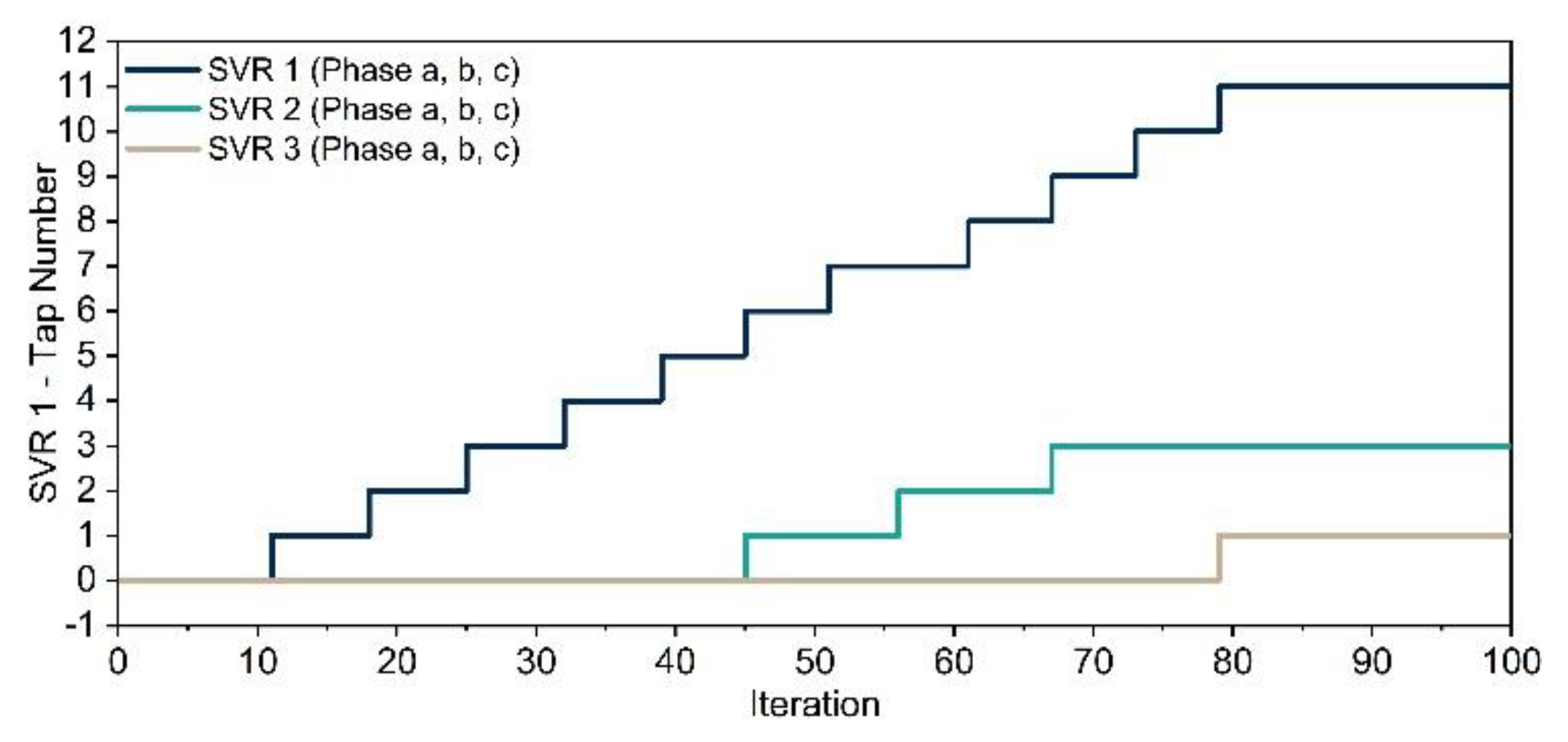
- It calculates the actual switching sequence of LVCs based on their time delays. It is shown through dynamic simulation in Simulink that the proposed power flow method produces more accurate results than the methods of [1,2,3] which are considered the state of the art in the steady-state modeling of LVCs.
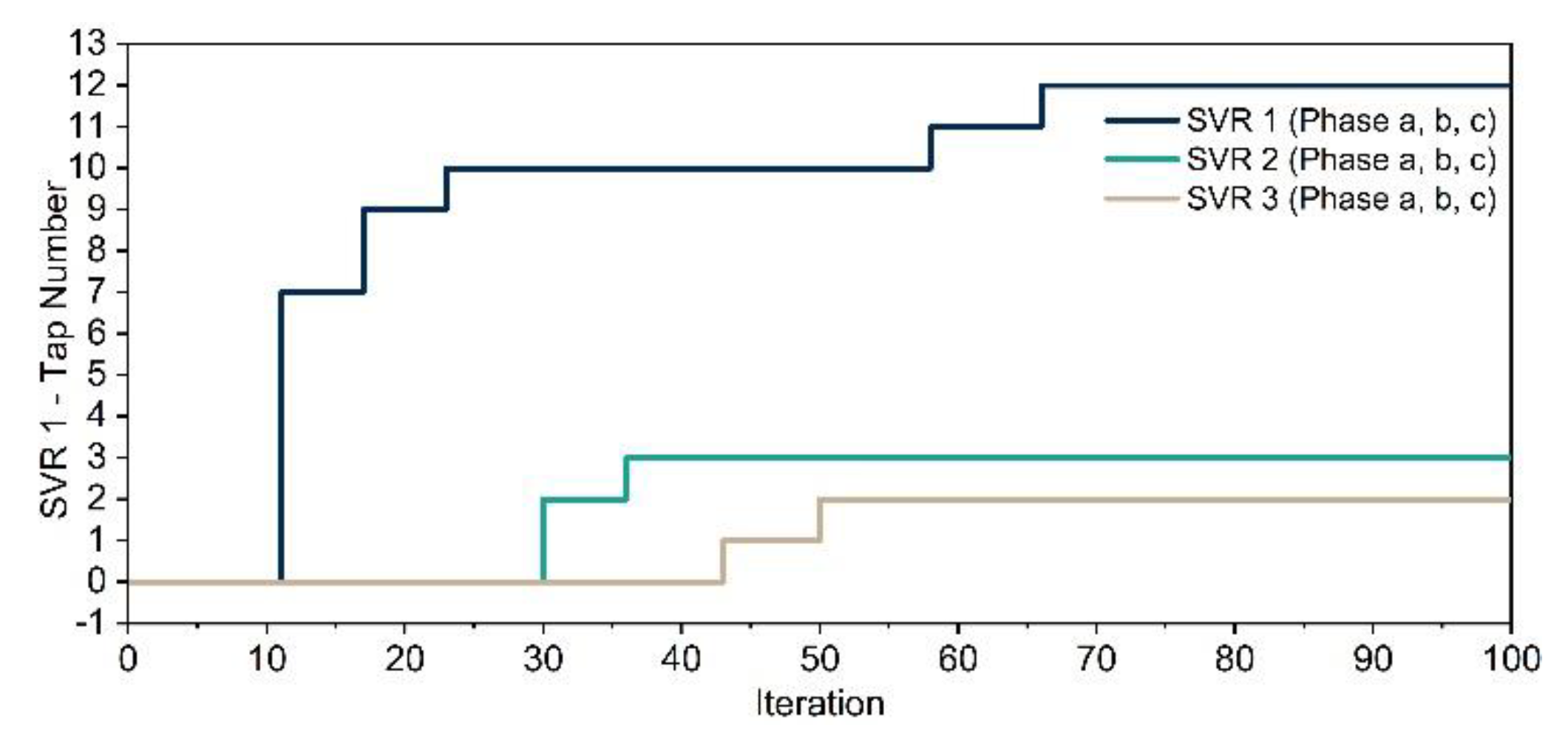
- Three-phase self- and mutual-sensitivity parameters are derived relating the control variables (e.g., taps of OLTC and SVRs, capacitors, reactive power of DGs) with the regulated voltages of the network. The sensitivity parameters are then applied in the proposed algorithm to accelerate the convergence of the power flow, reducing significantly the computation time. This property is very important since power flow computation with LVCs is widely applied in real-time DMS applications, in which time is a crucial factor.
2. Weather and Magnetic Dependent Power Flow
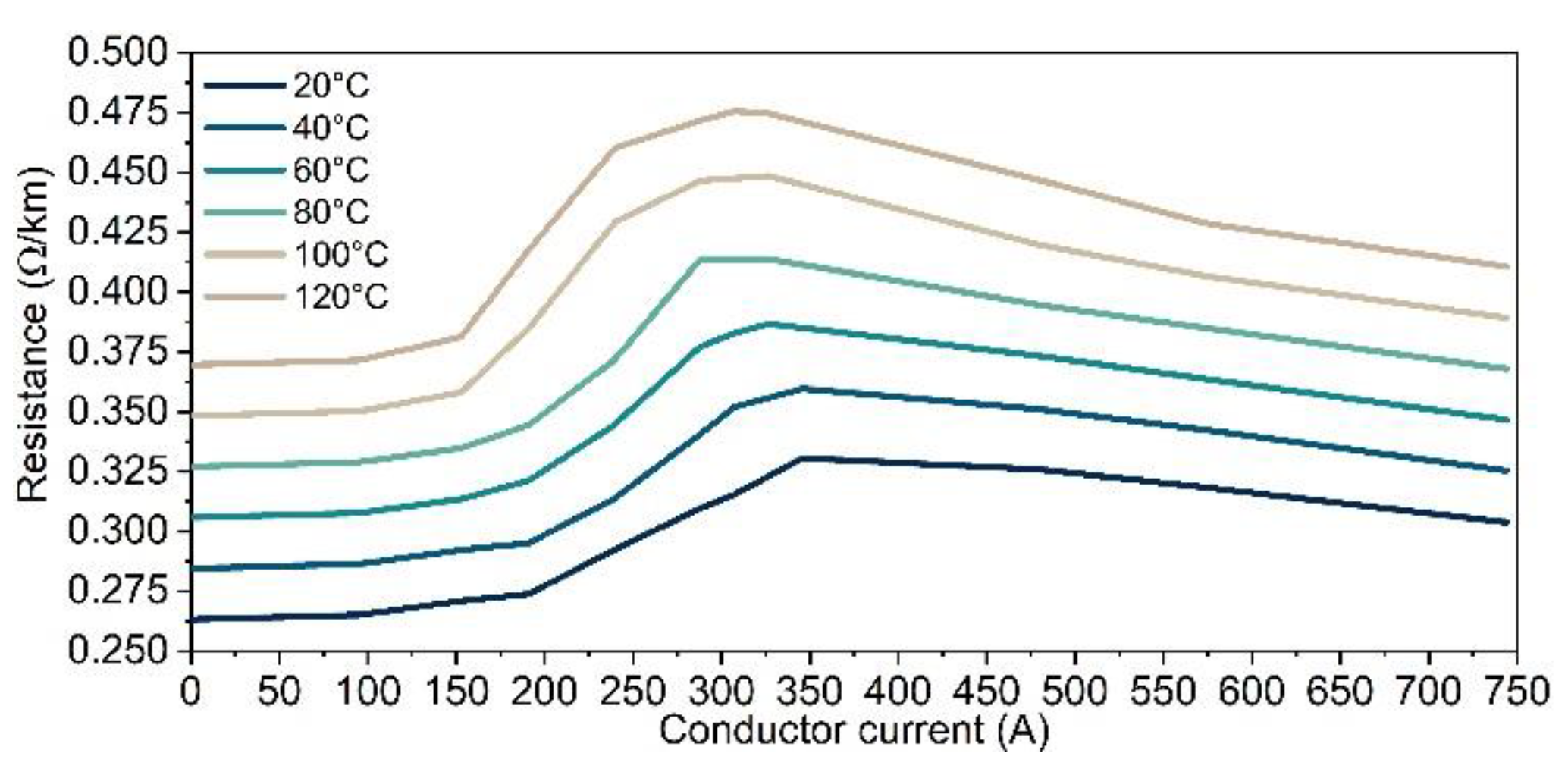
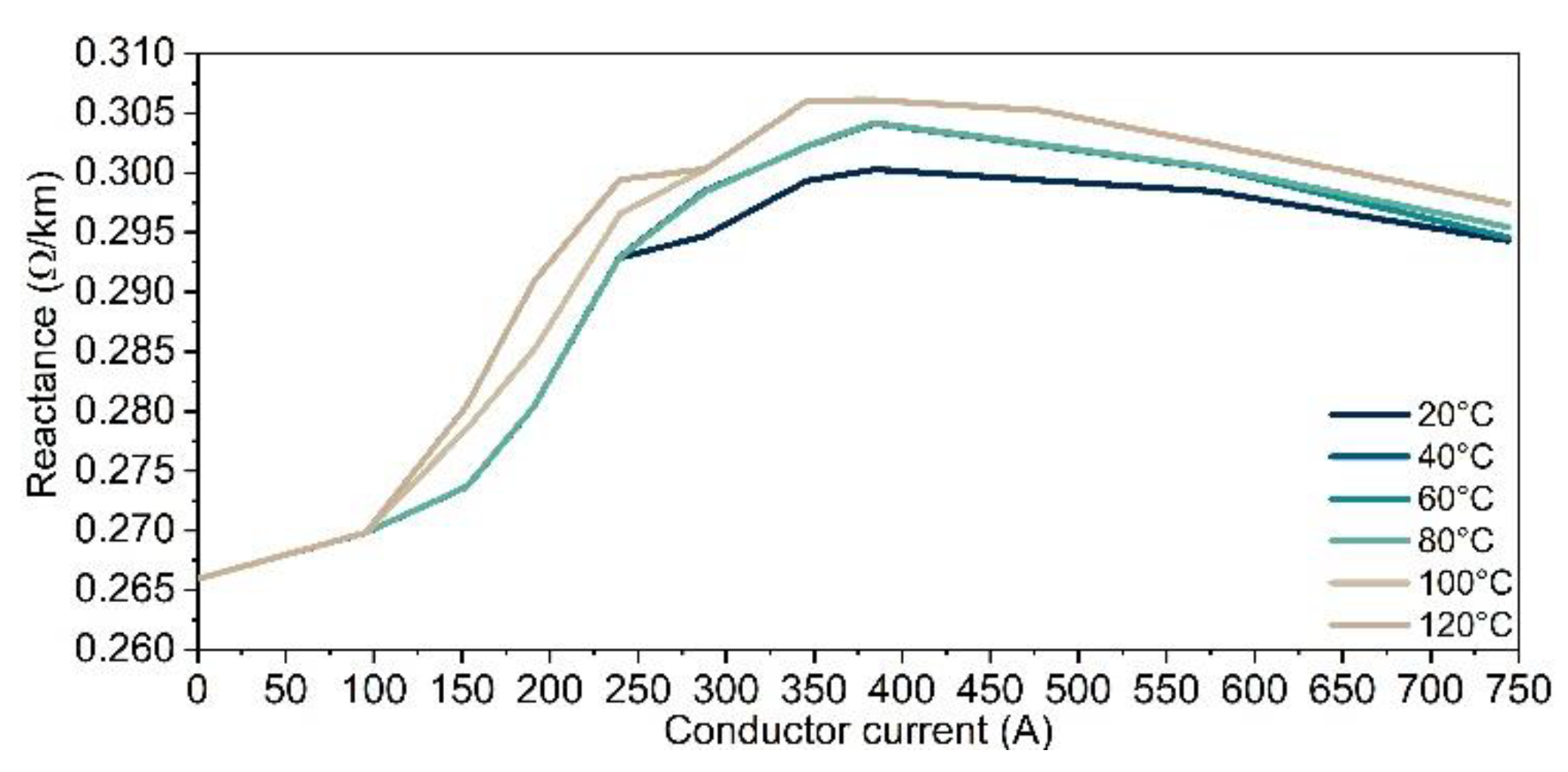
2.1. Thermal Modeling of Overhead Conductors
2.2. Modeling of the Magnetic Effects
2.3. Power Flow Solver Using Matrix Decomposition
3. Modeling of Local Voltage Controllers
3.1. Switched Capacitors
3.2. Step Voltage Regulators
3.3. On-Load Tap Changing Transformers
3.4. Distributed Generators
- Voltage and current profile: Electronically coupled DGs can generate balanced phase-to-phase voltage, balanced phase-to-neutral voltage, or balanced current. On the opposite, synchronous generators present nonzero finite negative- and zero-sequence admittances, and therefore, they generate unbalanced voltages and currents [14].
- Power profile: DGs can operate in constant PQ, constant PV (conventional PV bus modeling), or constant P-Q(V) mode [12,13]. The first case does not pose any challenge to the power flow computation since the DG is simply modeled as a negative constant power load. However, DGs with controllable reactive power may interact with the other LVCs increasing the number of power flow iterations or even leading to divergence.
4. An Algorithm for Estimating the Actual Switching Sequence of LVCs
4.1. Time Delays of LVCs
4.2. Presentation of the Proposed Algorithm
- INITIALIZATION: Initialize the taps of SVRs and OLTCs as well as the capacitor states, and set ∀. Specify the voltage bandwidth (), the time delays , , , , ∀.
- STEP 1: Compute the power flow considering the DGs. In this step, the power flow is executed until convergence considering the operational mode of DGs (refer to Section 3.4).
- STEP 2: Calculate for each controller as follows:
- STEP 3: Find the controller with the minimum priority indicator such that ∀. Then, for each controller , set . As shown, the priority indicator with the lowest value is subtracted from the other priority indicators. Consequently, controller with the minimum becomes 0 and it will undergo switching action. It should be noted that if one or more controllers have the same priority indicator value with controller , their priority indicator also becomes 0 in this step, and hence, they will also undergo switching actions simultaneously.
- STEP 4: In this step, controller with the minimum value, undergoes switching action according to Algorithm 1.
Algorithm 1. Switching Logic 1 Iforthen
{
}
If then
{
}
- STEP 5: In this step, of controller j is updated based on its mechanical delay, as follows:
- STEP 6: If at least one switching action took place in STEP 4, go to STEP 1 and run the power flow. If no switching action was executed, go to STEP 2. The algorithm terminates when no further switching actions are required and error tolerance is met.
5. Three-Phase Sensitivity Parameters of LVCs
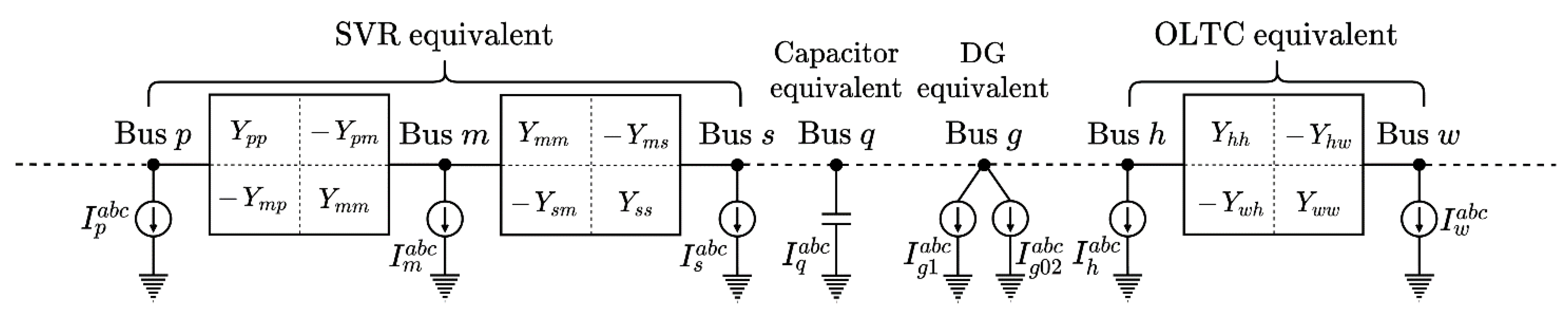
- includes the tap variables of each phase of the OLTC transformer. The vector directly regulates the vector that includes the magnitude of the three-phase voltages of bus w.
- includes the positive-sequence reactive power of the DG. The vector regulates the vector that includes the magnitude of positive-sequence voltage of bus g.
- includes the real and imaginary components of the negative- and zero-sequence current of the DG. The vector regulates the vector that includes the real and imaginary components of negative- and zero-sequence voltages of bus g.
- includes the tap variables of each phase of the SVR. The vector regulates the vector that includes the three-phase voltage magnitudes of bus s.
- includes the capacitors of each phase of bus q. The vector regulates the vector that includes the three-phase voltage magnitudes of bus q.
6. A Novel Sensitivity-Based Algorithm with Accelerated Convergence
- INITIALIZATION: Similar to the initialization in Section 4.
- STEP 1: Similar to STEP 1 of Section 4.
- STEP 2: Similar to STEP 2 of Section 4.
- STEP 3: Similar to STEP 3 of Section 4.
- STEP 4: In this step, the change in voltage of the LVCs is predicted based on the operation of the DG utilizing the sensitivity relationship. As the DGs in the network react instantaneously, we firstly estimate the variation of the positive sequence reactive power () as well as the negative- and zero-sequence currents () of DGs based on Equation (10). In Equation (10), and are the deviation of and from their set reference voltages, respectively. The notation denotes an estimate value.
- STEP 5: In this step, based on the predicted voltages (from STEP 4), we perform switching action at the LVC with the minimum , as presented in Algorithm 2.
| Algorithm 2. Switching Logic 2 |
| Iforthen { } If then { } |
- STEP6: If a switching action took place in STEP 5, it would make the DG voltages deviate from their reference values. Therefore, further DG action is required to maintain DG reference voltages. This is achieved by correcting again the DG control variables and , as follows in Equation (13). Note that Equation (13) is derived from Equation (A1) presented in the Appendix A.
7. Validation and Performance of the Proposed Sensitivity-Based Algorithm
- (A)
- 8-Bus Balanced Network
- (B)
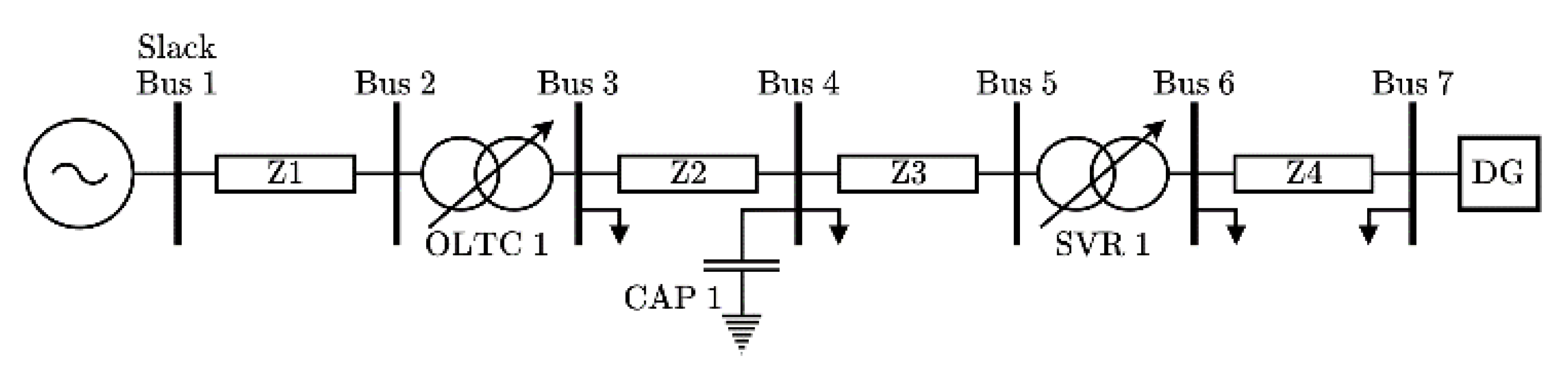
- 7-Bus Unbalanced Network
8. Influence of Weather on the LVC States and Power Flow
- (A)
- Network description
- (B)
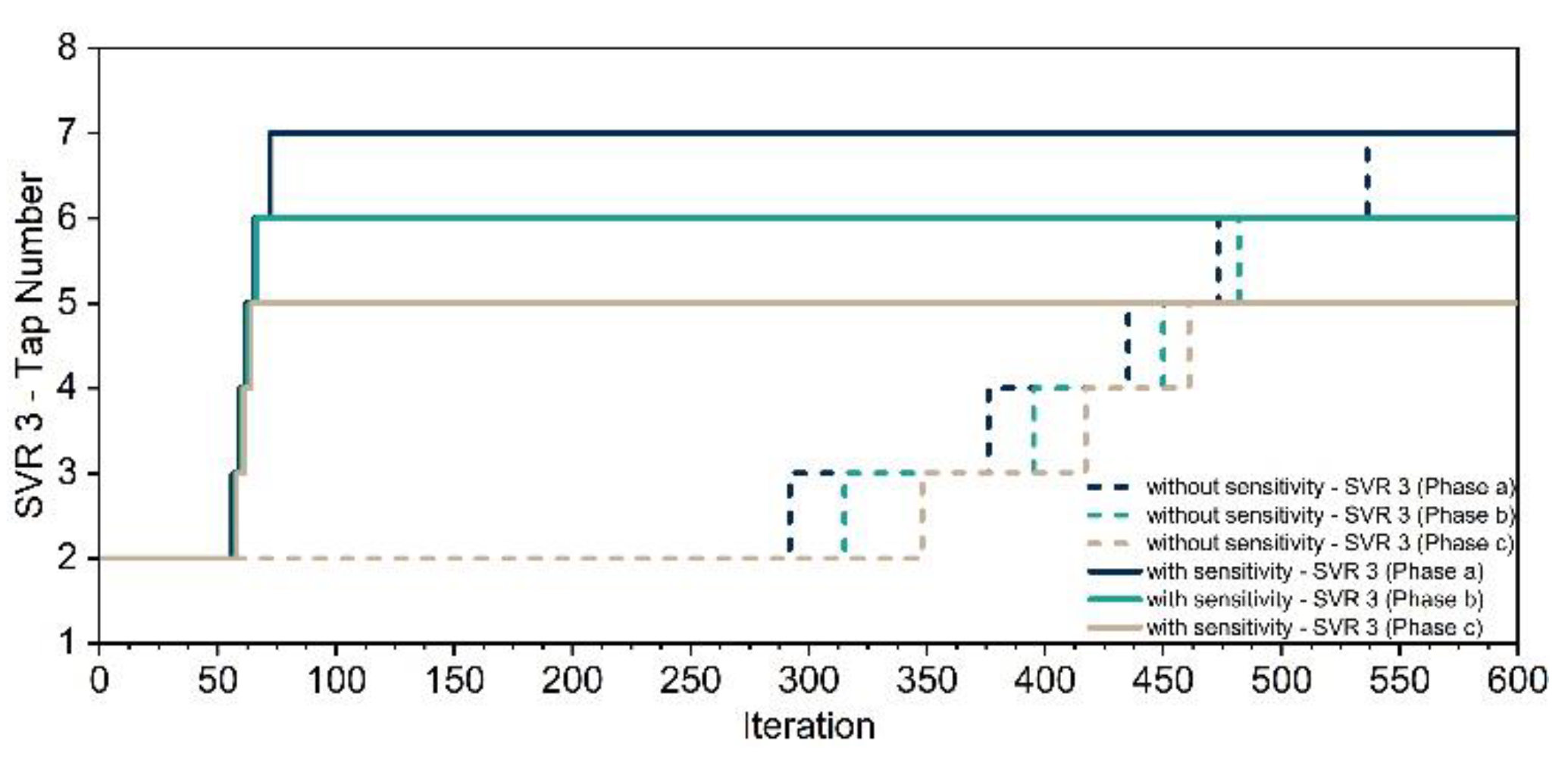
- Comparison between the investigated algorithms
- (C)
- Accuracy of the Sensitivity-Based Algorithm
- Scenario 1: The loads of the network are reduced to 70% of their nominal value.
- Scenario 2: The loads of the network are increased to 120% of their nominal value.
- Scenario 3: The generated active power of each DG is increased to 3 MW.
- Scenario 4: The reference voltage of all SVRs, capacitors, and DGs is set to 7200 V.
- Scenario 5: The initial tap position for all the SVRs is set to tap number 8.
- Scenario 6: for is set to 1. It practically means that the DGs generate almost zero reactive power.
- (D)
- Weather Data Acquisition
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Roytelman, I.; Ganesan, V. Modeling of local controllers in distribution network applications. IEEE Trans. Power Del. 2000, 15, 1232–1237. [Google Scholar] [CrossRef]
- Jabr, R.A.; Džafic, I.; Karaki, S. Tracking Transformer Tap Position in Real-Time Distribution Network Power Flow Applications. IEEE Trans. Smart Grid 2016, 9, 2442–2452. [Google Scholar] [CrossRef]
- Džafic, I.; Jabr, R.A.; Halilovic, E.; Pal, B.C. A sensitivity approach to model local voltage controllers in distribution networks. IEEE Trans. Power Syst. 2014, 29, 1419–1428. [Google Scholar] [CrossRef]
- Todescato, M.; Carli, R.; Schenato, L.; Barchi, G. Smart Grid State Estimation with PMUs Time Synchronization Errors. Energies 2020, 13, 5148. [Google Scholar] [CrossRef]
- Garcia, P.A.; Pereira, J.L.; Carneiro, S.; Da Costa, V.M.; Martins, N. Three-phase power flow calculations using the current injection method. IEEE Trans. Power Syst. 2000, 15, 508–514. [Google Scholar] [CrossRef]
- Junior, H.M.R.; Melo, I.D.; Nepomuceno, E.G. An interval power flow for unbalanced distribution systems based on the Three-Phase Current Injection Method. Int. J. Electr. Power Energy Syst. 2022, 139, 107921. [Google Scholar] [CrossRef]
- Murari, K.; Padhy, N.P. Graph-theoretic based approach for the load-flow solution of three-phase distribution network in the presence of distributed generations. IET Gener. Transm. Distrib. (IET) 2020, 14, 1627–1640. [Google Scholar] [CrossRef]
- Verma, R.; Sarkar, V. Active distribution network load flow analysis through non-repetitive FBS iterations with integrated dg and transformer modelling. IET Gener. Transm. Distrib. 2019, 13, 478–484. [Google Scholar] [CrossRef]
- Wang, X.; Shahidehpour, M.; Jiang, C.; Tian, W.; Li, Z.; Yao, Y. Three-phase distribution power flow calculation for loop-based microgrids. IEEE Trans. Power Syst. 2018, 33, 3955–3967. [Google Scholar] [CrossRef]
- Chang, S.K.; Brandwajn, V. Adjusted solutions in fast decoupled load flow. IEEE Trans. Power Syst. 1988, 3, 726–733. [Google Scholar] [CrossRef]
- Joseph, A.; Smedley, K.; Mehraeen, S. Secure High DER Penetration Power Distribution via Autonomously Coordinated Volt/VAR Control. IEEE Trans. Power Deliv. 2020, 35, 2272–2284. [Google Scholar] [CrossRef]
- Std 1547-2018; IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces. IEEE: New York, NY, USA, 2018.
- Kraiczy, M.; Stetz, T.; Braun, M. Parallel Operation of Transformers with on Load Tap Changer and Photovoltaic Systems with Reactive Power Control. IEEE Trans. Smart Grid 2018, 9, 6419–6428. [Google Scholar] [CrossRef]
- Pompodakis, E.E.; Kryonidis, G.; Demoulias, C.; Alexiadis, M. A Generic Power Flow Algorithm for Unbalanced Islanded Hybrid AC/DC Microgrids. IEEE Trans. Power Syst. 2021, 36, 1107–1120. [Google Scholar] [CrossRef]
- Peterson, N.M.; Meyer, W.S. Automatic adjustment of transformer and phase shifter taps in the Newton power flow. IEEE Trans. Power App. Syst. 1971, PAS-90, 103–108. [Google Scholar] [CrossRef]
- Cetindag, B.; Kocar, I.; Guèye, A.; Karaagac, U. Modeling of Step Voltage Regulators in Multiphase Load Flow Solution of Distribution Systems Using Newton’s Method and Augmented Nodal Analysis. Elect. Power Comp. Syst. 2017, 45, 1667–1677. [Google Scholar] [CrossRef]
- Expósito, A.G.; Ramos, E.R.; Džafic, I. Hybrid real–complex current injection-based load flow formulation. Elect. Power Syst. Res. 2015, 119, 237–246. [Google Scholar] [CrossRef]
- Kocar, I.; Mahseredjian, J.; Karaagac, U.; Soykan, G.; Saad, O. Multiphase load-flow solution for large-scale distribution systems using MANA. IEEE Trans. Power Deliv. 2014, 29, 908–915. [Google Scholar] [CrossRef]
- Viawan, F.A.; Karlsson, D. Combined local and remote voltage and reactive power control in the presence of induction machine distributed generation. IEEE Trans. Power Syst. 2007, 22, 2003–2012. [Google Scholar] [CrossRef]
- Viawan, F.A.; Karlsson, D. Voltage and reactive power control in systems with synchronous machine-based distributed generation. IEEE Trans. Power Del. 2008, 23, 1079–1087. [Google Scholar] [CrossRef]
- Yorino, N.; Zoka, Y.; Watanabe, M.; Kurushima, T. An optimal autonomous decentralized control method for voltage control devices by using a multi-agent system. IEEE Trans. Power Syst. 2015, 30, 2225–2233. [Google Scholar] [CrossRef]
- Ranamuka, D.; Agalgaonkar, A.P.; Muttaqi, K.M. Examining the interactions between DG units and voltage regulating devices for effective voltage control in distribution systems. IEEE Trans. Ind. Appl. 2017, 33, 1485–1496. [Google Scholar] [CrossRef]
- Ranamuka, D.; Agalgaonkar, A.; Muttaqi, K. Online voltage control in distribution systems with multiple voltage regulating devices. IEEE Trans. Sustain. Energy 2014, 5, 617–628. [Google Scholar] [CrossRef]
- Valverde, G.; Cutsem, T.V. Model predictive control of voltages in active distribution networks. IEEE Trans. Smart Grid 2013, 4, 2152–2161. [Google Scholar] [CrossRef] [Green Version]
- El Moursi, M.S.; Zeineldin, H.H.; Kirtley, J.L.; Alobeidli, K. A dynamic master/slave reactive power-management scheme for smart grids with distributed generation. IEEE Trans. Power Deliv. 2014, 29, 1157–1167. [Google Scholar] [CrossRef]
- Agalgaonkar, Y.; Pal, B.; Jabr, R. Distribution voltage control considering the impact of PV generation on tap changers and autonomous regulators. IEEE Trans. Power Syst. 2014, 29, 182–192. [Google Scholar] [CrossRef] [Green Version]
- Pompodakis, E.; Ahmed, A.; Alexiadis, M. A Three-Phase Weather-Dependent Power Flow Approach for 4-Wire Multi-Grounded Unbalanced Microgrids with Bare Overhead Conductors. IEEE Trans. Power Syst. 2021, 36, 2293–2303. [Google Scholar] [CrossRef]
- Ahmed, A.; McFadden, F.J.S.; Rayudu, R. Weather-Dependent Power Flow Algorithm for Accurate Power System Analysis Under Variable Weather Conditions. IEEE Trans. Power Syst. 2019, 34, 2719–2729. [Google Scholar] [CrossRef]
- Hsieh, T.-Y.; Chen, T.-H.; Yang, N.-C. Matrix decompositions-based approach to Z-bus matrix building process for radial distribution systems. Int. J. Electr. Power Energy Syst. 2017, 89, 62–68. [Google Scholar] [CrossRef]
- Std 738-2012 (Revision of IEEE Std 738-2006-Incorporates IEEE Std 738-2012 Cor 1-2013); IEEE Standard for Calculating the Current-Temperature Relationship of Bare Overhead Conductors. IEEE: New York, NY, USA, 2013; pp. 1–72.
- ACL Cables. Online Catalog. Available online: http://www.acl.lk/front_img/1502964374ACL_bare_conductor_2015(2).pdf (accessed on 7 October 2020).
- Roytelman, I.; Ganesan, V. Coordinated local and centralized control in distribution management systems. IEEE Tans. Power Deliv. 2000, 15, 718–724. [Google Scholar] [CrossRef]
- Pompodakis, E.E.; Kryonidis, G.C.; Alexiadis, M.C. A comprehensive three-phase step voltage regulator model with efficient implementation in the Z-bus power flow. Electr. Power Syst. Res. 2021, 199, 107443. [Google Scholar] [CrossRef]
- Pompodakis, E.E.; Kryonidis, G.C.; Alexiadis, M.C. OLTC transformer model connecting 3-wire MV with 4-wire multigrounded LV networks. Electr. Power Syst. Res. 2021, 192, 107003. [Google Scholar] [CrossRef]
- Eaton Cooper Power Series, Voltage Regulators vs. Load Tap Changers. Voltage Regulators Reference Data TD225012EN. 2017. Available online: https://www.eaton.com/content/dam/eaton/products/medium-voltage-power-distribution-control-systems/voltage-regulators/voltage-regulators-vs-load-tap-changers-information-td225012en.pdf (accessed on 2 March 2022).
- Bettanin, A.; Coppo, M.; Savio, A.; Turri, R. Voltage management strategies for low voltage networks supplied through phase-decoupled on-load-tap-changer transformers. In Proceedings of the 2017 AEIT International Annual Conference, Cagliari, Italy, 20–22 September 2017; pp. 1–6. [Google Scholar]
- Fundamentals Ltd Power Systems Technology. Enhanced Voltage Control EAVC Settings Calculation Guide. Fundamentals Reference F9183. 15 August 2018. Available online: https://www.enwl.co.uk/globalassets/innovation/enwl011/enwl011-closedown-appendix-d.pdf (accessed on 2 March 2022).
- Pompodakis, E.; Ahmed, A.; Alexiadis, M. A Sensitivity-Based Three-Phase Weather-Dependent Power Flow Algorithm for Networks with Local Controllers—Supplementary. TechRxiv 2020. preprint. [Google Scholar] [CrossRef]
- Pompodakis, E.; Chrysochos, A.I.; Ahmed, A.; Alexiadis, M.C. Time-Series Temperature-Dependent Power Flow Considering Unbalanced Thermoelectric Equivalent Circuits for Underground LV and MV Cables. TechRxiv 2021. preprint. [Google Scholar] [CrossRef]
- Don Wareham, Step Voltage Regulators. Cooper Power Systems by Eaton. 2013. Available online: http://www.cscos.com/wp-content/uploads/NY1839-Eaton-Regulators-D.Wareham.pdf (accessed on 1 November 2020).
- Huseinagić, I.; Džafić, I.; Jabr, R.A. A compensation technique for unsymmetrical three-phase power flow. In Proceedings of the International Symposium on Industrial Electronics (INDEL), Banja Luka, Bosnia, 3–5 November 2016. [Google Scholar]
- Arritt, R.F.; Dugan, R.C. The IEEE 8500-node test feeder. In Proceedings of the IEEE PES T&D 2010, New Orleans, LA, USA, 19–22 April 2010; pp. 1–6. [Google Scholar]
- DICABS Conductors Technical Catalogue. Online Catalog. Available online: https://www.academia.edu/34442747/Conductor_Technical_Catalogure (accessed on 25 February 2020).
- Lagouvardos, K.; Kotroni, V.; Bezes, A.; Koletsis, I.; Kopania, T.; Lykoudis, S.; Mazarakis, N.; Papagiannaki, K.; Vougioukas, S. The automatic weather stations NOANN network of the National Observatory of Athens: Operation and database. Geosci. Data J. 2017, 4, 4–16. [Google Scholar] [CrossRef]
- IEEE PES. Distribution Test Feeders, “8500-Node Test Feeder”. Available online: http://www.ewh.ieee.org/soc/pes/dsacom/testfeeders/index.html (accessed on 2 March 2022).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length of the lines | 10 km |
| Voltage of slack bus | 7200 V |
| Frequency of the network | 50 Hz |
| Resistance of lines | 0.4 Ω/km |
| Self-reactance of the lines | 0.3 Ω/km |
| Mutual-reactance of the lines | 0.1 Ω/km |
| Reference voltage of SVRs | 7500 V |
| Bandwidth of SVRs | 70 V |
| Intentional delay of SVR1 | 10 s |
| Mechanical delay of SVR1 | 2 s |
| Intentional delay of SVR2 | 20 s |
| Mechanical delay of SVR2 | 3 s |
| Intentional delay of SVR3 | 30 s |
| Mechanical delay of SVR3 | 4 s |
| Active power of DG | 1 MW |
| Reference voltage of DG | 7500 V |
| Droop gain of DG | V/Var |
| Load of Buses 3, 5, 8 | |
| Load Bus 7 |
| Node 2a (V) | Node 3a (V) | Node 4a (V) | Node 5a (V) | Node 6a (V) | Node 7a (V) | Node 8a (V) | |
|---|---|---|---|---|---|---|---|
| Simulink | 6988.3309 | 7468.7787 | 7340.1399 | 7477.7693 | 7421.3890 | 7467.8162 | 7527.2533 |
| Without sensitivity | 6988.3417 | 7468.7902 | 7340.1411 | 7477.7687 | 7421.3933 | 7467.7770 | 7527.1493 |
| With sensitivity | 6988.3417 | 7468.7902 | 7340.1411 | 7477.7687 | 7421.3933 | 7467.7770 | 7527.1493 |
| Algorithm [1] | 6963.9601 | 7486.2571 | 7337.4348 | 7475.0117 | 7400.0861 | 7492.5872 | 7535.7599 |
| Algorithm [3] | 6951.5222 | 7472.8864 | 7313.0733 | 7495.9002 | 7412.0259 | 7504.6762 | 7539.9454 |
| Length of the lines | 10 km |
| Voltage of slack bus | 7200 V |
| Frequency of the network | 50 Hz |
| Resistance of lines | km |
| Self-reactance of the lines | /km |
| Mutual-reactance of the lines | /km |
| Reference voltage of SVR and OLTC | 7500 V |
| Bandwidth of SVR and OLTC | 70 V |
| Reference voltage of CAP | 7500 V |
| Capacitance of each phase | F |
| Bandwidth of Capacitors | 350 V |
| Intentional delay of OLTC | 10 s |
| Mechanical delay of OLTC | 2 s |
| Intentional delay of CAP | 20 s |
| Intentional delay of SVR | 30 s |
| Mechanical delay of SVR | 4 s |
| Active power of DG | 1 MW |
| Reference voltage of DG | 7500 V |
| Droop gain of DG | V/Var |
| Load of Buses 3, 6, 7 | |
| Load Bus 4 |
| OLTC 1 Taps (Phase a, b, c) | CAP 1 (Phase a, b, c) | SVR 1 Taps (Phase a, b, c) | DG Reactive Power | |
|---|---|---|---|---|
| Simulink | (10, 12, 10) | (ON, ON, OFF) | (2, 4, 3) | 690 kvar (inductive) |
| Without sensitivity | (10, 12, 10) | (ON, ON, OFF) | (2, 4, 3) | 690 kvar (inductive) |
| With sensitivity | (10, 12, 10) | (ON, ON, OFF) | (2, 4, 3) | 690 kvar (inductive) |
| Algorithm [1] | (11, 10, 10) | (OFF, ON, OFF) | (3, 2, 2) | 666 kvar (inductive) |
| Algorithm [3] | (11, 11, 10) | (OFF, ON, OFF) | (3, 3, 2) | 625 kvar (inductive) |
| Node 5a (V) | Node 5b (V) | Node 5c (V) | Node 6a (V) | Node 6b (V) | Node 6c (V) | Node 7a (V) | Node 7b (V) | Node 7c (V) | |
|---|---|---|---|---|---|---|---|---|---|
| Simulink | 7391.8685 | 7311.9286 | 7350.1776 | 7484.2669 | 7494.7264 | 7488.0011 | 7534.5769 | 7534.5769 | 7534.5769 |
| Without sensitivity | 7391.8480 | 7311.9139 | 7350.2046 | 7484.2461 | 7494.7117 | 7488.0209 | 7534.5095 | 7534.5095 | 7534.5095 |
| With sensitivity | 7391.8480 | 7311.9139 | 7350.2046 | 7484.2461 | 7494.7117 | 7488.0209 | 7534.5095 | 7534.5095 | 7534.5095 |
| Algorithm [1] | 7340.9089 | 7412.7342 | 7381.0320 | 7478.5510 | 7505.3934 | 7473.2949 | 7533.3146 | 7533.3146 | 7533.3146 |
| Algorithm [3] | 7348.0466 | 7337.2315 | 7385.8412 | 7485.8225 | 7474.8046 | 7478.1643 | 7531.2463 | 7531.2463 | 7531.2463 |
| Without Sensitivity | With Sensitivity | Algorithm [1] | Algorithm [3] | |
|---|---|---|---|---|
| Required iterations | 74 | 27 | 61 | 9 |
| Without Sensitivity | With Sensitivity | Algorithm [1] | Algorithm [3] | |
|---|---|---|---|---|
| Required iterations | 96 | 29 | 76 | 8 |
| DG # | Power Profile | Connecting Bus | Voltage/Current Profile |
|---|---|---|---|
| 1 | Constant PV | 100 | SG (Unbalanced voltage and current) |
| 2 | Droop Q(V) | 350 | Balanced Current |
| 3 | Droop Q(V) | 835 | Balanced Current |
| 4 | Constant PV | 1600 | Balanced Voltage |
| Length of the lines | Given in [45] |
| Loads | Given in [45] |
| Voltage of slack bus | 7200 V |
| Frequency of the network | 50 Hz |
| Line type and data | All lines are Penguin ACSR [43]. The mutual impedance between all the lines was consider 0.1 j Ω/km. |
| Reference voltage of SVRs | 7500 V |
| Bandwidth of SVRs | 70 V |
| Intentional delay of SVR 1 | 15 s |
| Intentional delay of SVR 2 | 60 s |
| Intentional delay of SVR 3 | 60 s |
| Intentional delay of SVR 4 | 90 s |
| Mechanical delay of SVRs | 2 s |
| Intentional delay of CAP 1 | 30 s |
| Intentional delay of CAP 2 | 45 s |
| Intentional delay of CAP 3 | 75 s |
| Intentional delay of CAP 4 | 75 s |
| Reference voltage of CAPs | 7600 V |
| Bandwidth of CAPs | 300 V |
| Capacitance of each phase | F |
| Active power of DGs | 2 MW |
| Reference voltage of DGs | 7500 V |
| Droop gain of DGs 2 & 3 | V/var |
| Ambient Temperature Ta (°C) | Solar Irradiance qs (W/m2) | Wind Speed VW (km/h) | |
|---|---|---|---|
| Summer | 36.3 | 847 | 4.8 |
| Winter | 7.3 | 0 | 14.5 |
| SVR 1 (Phase a, b, c) | SVR 2 (Phase a, b, c) | SVR 3 (Phase a, b, c) | SVR 4 (Phase a, b, c) | CAP 1 (Phase a, b, c) | CAP 2 (Phase a, b, c) | CAP 3 (Phase a, b, c) | CAP 4 (Phase a, b, c) | |
|---|---|---|---|---|---|---|---|---|
| Proposed-Summer | (6, 6, 6) | (1, 2, 2) | (7, 6, 5) | (3, 2, 2) | (OFF, OFF, OFF) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) |
| Proposed-Winter | (6, 6, 6) | (1, 2, 2) | (6, 5, 4) | (2, 2, 2) | (OFF, OFF, OFF) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) |
| Algorithm [1]-Summer | (6, 6, 6) | (1, 2, 2) | (8, 7, 5) | (4, 3, 2) | (OFF, OFF, OFF) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) |
| Algorithm [1]-Winter | (6, 6, 6) | (1, 2, 2) | (6, 5, 5) | (3, 2, 2) | (OFF, OFF, OFF) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) |
| Algorithm [3]-Summer | (6, 6, 6) | (1, 2, 2) | (8, 7, 5) | (4, 3, 2) | (ON, ON, ON) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) |
| Algorithm [3]-Winter | (6, 6, 6) | (1, 2, 2) | (6, 5, 4) | (3, 2, 2) | (ON, ON, ON) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) |
| DG 1 | DG 2 | DG 3 | DG 4 | |
|---|---|---|---|---|
| Proposed Algorithm (Summer) | 3262 kvar (capacitive) | 570 kvar (capacitive) | 520 kvar (inductive) | 1780 kvar (capacitive) |
| Proposed Algorithm (Winter) | 2884 kvar (capacitive) | 499 kvar (capacitive) | 506 kvar (inductive) | 1542 kvar (capacitive) |
| Algorithm [1] (summer) | 3274 kvar (capacitive) | 628 kvar (capacitive) | 563 kvar (inductive) | 1921 kvar (capacitive) |
| Algorithm [1] (winter) | 2744 kvar (capacitive) | 538 kvar (capacitive) | 537 kvar (inductive) | 1946 kvar (capacitive) |
| Algorithm [3] (summer) | 3055 kvar (capacitive) | 619 kvar (capacitive) | 569 kvar (inductive) | 1904 kvar (capacitive) |
| Algorithm [3] (winter) | 2423 kvar (capacitive) | 517 kvar (capacitive) | 552 kvar (inductive) | 2121 kvar (capacitive) |
| Required Iterations | Computation Time (Seconds) | |
|---|---|---|
| Proposed-without sensitivity (summer) | 553 | 331 |
| Proposed-with sensitivity (summer) | 79 | 47 |
| Proposed-without sensitivity (winter) | 261 | 156 |
| Proposed-with sensitivity (winter) | 49 | 29 |
| Algorithm [1] (summer) | 97 | 57 |
| Algorithm [1] (winter) | 69 | 40 |
| Algorithm [3] (summer) | 20 | 12 |
| Algorithm [3] (winter) | 14 | 9 |
| SVR 1 (Phase a, b, c) | SVR 2 (Phase a, b, c) | SVR 3 (Phase a, b, c) | SVR 4 (Phase a, b, c) | CAP 1 (Phase a, b, c) | CAP 2 (Phase a, b, c) | CAP 3 (Phase a, b, c) | CAP 4 (Phase a, b, c) | Iterations | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Scenario 1 | without sensitivity | (6, 6, 6) | (0, 1, 1) | (3, 3, 3) | (2, 2, 2) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (ON, ON, ON) | 143 |
| with sensitivity | (6, 6, 6) | (0, 1, 1) | (3, 3, 3) | (2, 2, 2) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (ON, ON, ON) | 34 | |
| Scenario 2 | without sensitivity | (7, 7, 7) | (3, 3, 2) | (14, 9, 4) | (6, 3, 2) | (OFF, OFF, OFF) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) | 773 |
| with sensitivity | (7, 7, 7) | (3, 3, 2) | (14, 9, 4) | (6, 3, 2) | (OFF, OFF, OFF) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) | 109 | |
| Scenario 3 | without sensitivity | (6, 6, 6) | (0, 0, 1) | (5, 4, 3) | (2, 2, 2) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (ON, ON, ON) | 175 |
| with sensitivity | (6, 6, 6) | (0, 0, 1) | (5, 4, 3) | (2, 2, 2) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (ON, ON, ON) | 39 | |
| Scenario 4 | without sensitivity | (0, 0, 0) | (1, 2, 2) | (8, 5, 4) | (4, 2, 2) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (ON, OFF, OFF) | 169 |
| with sensitivity | (0, 0, 0) | (1, 2, 2) | (8, 5, 4) | (4, 2, 2) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (OFF, OFF, OFF) | (ON, OFF, OFF) | 38 | |
| Scenario 5 | without sensitivity | (7, 7, 7) | (1, 1, 1) | (8, 4, 2) | (3, 2, 0) | (OFF, OFF, OFF) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) | 871 |
| with sensitivity | (7, 7, 7) | (1, 1, 1) | (8, 4, 2) | (3, 1, 1) | (OFF, OFF, OFF) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) | 116 | |
| Scenario 6 | without sensitivity | (6, 6, 6) | (2, 3, 3) | (9, 8, 7) | (3, 2, 2) | (ON, ON, ON) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) | 379 |
| with sensitivity | (6, 6, 6) | (2, 3, 3) | (9, 8, 7) | (3, 2, 2) | (ON, ON, ON) | (ON, ON, ON) | (OFF, OFF, OFF) | (ON, ON, ON) | 70 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pompodakis, E.E.; Ahmed, A.; Alexiadis, M.C. A Sensitivity-Based Three-Phase Weather-Dependent Power Flow Algorithm for Networks with Local Voltage Controllers. Energies 2022, 15, 1977. https://doi.org/10.3390/en15061977
Pompodakis EE, Ahmed A, Alexiadis MC. A Sensitivity-Based Three-Phase Weather-Dependent Power Flow Algorithm for Networks with Local Voltage Controllers. Energies. 2022; 15(6):1977. https://doi.org/10.3390/en15061977
Chicago/Turabian StylePompodakis, Evangelos E., Arif Ahmed, and Minas C. Alexiadis. 2022. "A Sensitivity-Based Three-Phase Weather-Dependent Power Flow Algorithm for Networks with Local Voltage Controllers" Energies 15, no. 6: 1977. https://doi.org/10.3390/en15061977
APA StylePompodakis, E. E., Ahmed, A., & Alexiadis, M. C. (2022). A Sensitivity-Based Three-Phase Weather-Dependent Power Flow Algorithm for Networks with Local Voltage Controllers. Energies, 15(6), 1977. https://doi.org/10.3390/en15061977