The magnitude of the structural deformation of the supercavitating projectile is positively related to the hydrodynamic force, which is proportional the square of the speed. Therefore, no significant deformation is found when a supercavitating projectile is flying at a low speed. Supercavitating projectiles with an initial speed in the range of 800–1600 m/s were chosen to perform the FSI numerical simulation, and to study the hydrodynamic characteristics and the structural deformation response characteristics by considering the FSI effect. The interval of the calculated initial speed was 200 m/s, and bidirectional FSI effect numerical simulations were performed for the operating conditions with initial speed of 800, 1000, 120,1400 and 1600 m/s.
4.1. FSI Simulation Results of Supercavitating Projectile
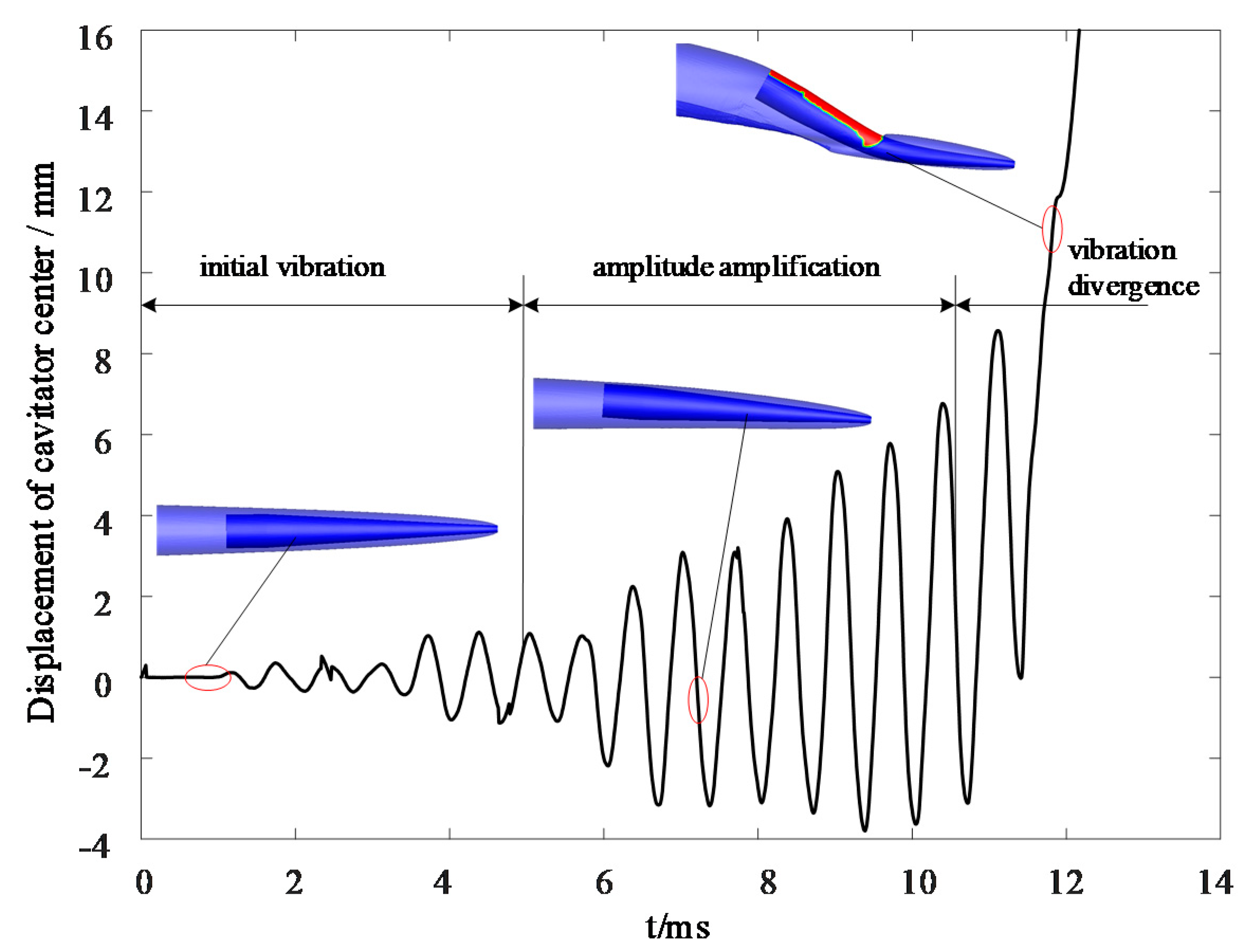
From the FSI simulation results, the flow parameters, supercavity shape, hydrodynamic force acting on the supercavitating projectile, motion characteristics of the supercavitating projectile, and dynamic deformation response process of the supercavitating projectile were obtained. Taking the case with an initial velocity of 1600 m/s as an example, the motion characteristics and structural deformation characteristics are presented. The tail-slap motion of the supercavitating projectile was gradually formed under the action of the initial perturbance of initial angle of attack or angular velocity. The tail-slap motion could not be unceasingly maintained and the stability of the trajectory was suddenly broken, which was mainly caused by the excessive structural deformation of the supercavitating projectile. The displacement of the cavitator center relative to the mass center according to the FSI simulation results was extracted and is displayed in
Figure 7. From the supercavitating projectile initially released to the moment of finally losing the trajectory stability, the structural deformation response underwent three typical stages: initial vibration, amplitude amplification, and vibration divergence.
After entering into water, the supercavitating projectile flies and is accompanied by a supercavity. Under the action of initial perturbance, the supercavitating projectile rotates slowly around the mass center, which results in a gradual increase in the angle of attack, and the side surface begins to touch the water by puncturing the supercavity. Further, the supercavitating projectile receives a righting moment, and rotates to the reverse direction and punctures the other side of the supercavity. Then, a continuous tail-slap motion is gradually formed. In this stage, the relative position between the supercavitating projectile and supercavity are displayed in
Figure 8. The amplitude of tail-slap motion is limited, and the relative offset between the supercavitating projectile and supercavity is very small. Thus, the produced hydrodynamic force is not strong enough to cause a significant structural deformation. In this condition, the FSI effect is very weak, and the supercavitating projectile exhibits a feature like a rigid body.
Subsequently, the amplitude of the tail-slap motion of the supercavitating projectile is enlarged significantly. Resultantly, the effective angle of attack increases synchronously, as well as the hydrodynamic force. Then, the strong alternating force leads to a high frequency, and a large structural deformation response is subsequently observed, and the amplitude of the structural vibration is gradually enlarged. This is the amplitude amplification stage, as shown in
Figure 7. In this stage, the maximum stress of the supercavitating projectile is no more than the yield limit of 93
# tungsten alloy, and the structural deformation is categorized to elastic deformation. Because of the structural deformation, the axis of the supercavitating projectile bends significantly during the tail-slap motion. Then, the wetted status is not only determined by the relative position between the supercavitating projectile and the supercavity, but also changed with the bending condition of the axis of the supercavitating projectile. Resultantly, the wetted area is somewhat further increased or decreased, which is determined by the frequencies and phase position of the tail-slap motion and structural vibration.
The deformation status of the supercavitating projectile and the relative position between the supercavitating projectile and the supercavity in the amplitude amplification stage are exhibited in
Figure 9. When the simulation time is 6.0 ms, the supercavitating projectile axis is upward-bending. Though the tail of supercavitating projectile punctures the supercavity and touches water at the lower side, the wetted area is small. In this condition, the offset directions of the supercavitating projectile tail caused by the structural deformation and tail-slap motion are opposite, and can be partially cancelled out. Therefore, the structural deformation decreases the wetted area and the hydrodynamic force. At 6.5 ms, the axis of the supercavitating projectile turns to concave-bending. The cavitator center shifts upward, and the axis of the produced supercavity locates above the axis of the supercavitating projectile. Therefore, a larger wetted zone at the lower side of the tail of supercavitating projectile occurs when puncturing the supercavity. When the angle of attack is positive and the lower side of the supercavitating projectile is wetted, the concave-bending deformation increases the wetted area, which is induced under a greater hydrodynamic force. Resultantly, the structural deformation further increases, and positive feedback takes place.
In the period of 8.2–10 ms, both the wetted area and the structural deformation of the supercavitating projectile continuously increase, and the supercavity shows an obvious asymmetric shape due to the significant changes in both the position and axial direction of the cavitator. In this stage, the structural deformation of the supercavitating projectile is significant, and exerts great influence on the position and shape of the supercavity. Moreover, the changes in flow field, in turn, affect the structural deformation through changing the hydrodynamic force. Therefore, the supercavitating projectile cannot be regarded as a rigid body because of the strong bidirectional FSI effect.
When the simulation time is equal to 10.6 ms, the supercavitating projectile comes into the vibration divergence stage. The deformation of the supercavitating projectile and the produced supercavity at this stage are displayed in
Figure 10. In this stage, both the amplitudes of the structural vibration and the tail-slap motion suddenly increase by a large margin in a short period of time, and sharply lose stability. At 10.6 ms, the deformation of the supercavitating projectile is still not very large, the axis also looks like a line, and the supercavity can fully envelop the supercavitating projectile.
However, at 10.8 ms, the supercavitating projectile axis becomes S-shaped, the cavitator center is below the mass center, and the tail center is above the mass center. Therefore, a very large offset between the supercavity and supercavitating projectile is produced, which leads to the supercavitating projectile being suddenly wetted in a large area, and subjected to a huge hydrodynamic force. Resultantly, there is a greater concave bending of the supercavitating projectile. Then, the motion stability, the continuity of the supercavity, and the restorability of the structural deformation further deteriorate, and the coupling effect of the structural vibration and the tail-slap motion promote this process. Finally, an unrecoverable structural deformation is formed in a short period of time, and directly causes the instability of the underwater trajectory. This is regarded as the main reason why the structure and motion of the high-speed projectile suddenly become unstable during the tail-slap motion underwater.
4.2. Influence of FSI Effect on Motion Characteristics of Supercavitating Projectile
The characteristics of the hydrodynamic force acting on the supercavitating projectile during the tail-slap motion are also obtained by considering the FSI effect. For the cases with initial speeds of 800, 1000, 1200, 1400, and 1600 m/s, the simulations on the characteristics of motion and hydrodynamic force of a rigid supercavitating projectile are also performed as a comparison to distinguish the influence of the FSI effect. The resulting hydrodynamic forces for supercavitating projectiles flying at different initial speeds are compared in
Figure 11. The structural deformation is directly represented by the magnitude of the hydrodynamic force. The dimensional form of the hydrodynamic forces of different cases is displayed in
Figure 11. Then, to exhibit the difference clearly, a comparison of cases with initial speeds of 800 m/s and 1000 m/s is displayed in
Figure 11a, and a comparison of cases with initial speeds of 1200 m/s, 1400 m/s, and 1600 m/s is shown in
Figure 11b.
As shown in
Figure 11a,b, the presented hydrodynamic characteristics during the tail-slap motion of the supercavitating projectile while considering the FSI effect are very different from those of the rigid supercavitating projectile. For the cases with initial speeds of 800 m/s and 100 m/s, the hydrodynamic force fluctuates at a low frequency because the upper side and the lower side of the supercavitating projectile touch water alternately during the tail-slap motion. Moreover, a high frequency and small amplitude fluctuation is observed in the hydrodynamic force of the supercavitating projectile, which is caused by the structural vibration. Because the frequency of the structural vibration is much higher than that of the tail-slap motion, the wetted status of the supercavitating projectile can change many times in one tail-slap period. Within the initial 20 ms, both the tail-slap motion and the structural vibration are stable. Thus, the supercavitating projectile can keep moving forward. In addition, for cases with an initial speed of 800 m/s, the hydrodynamic characteristics of the supercavitating projectile, considering the FSI effect, are similar to those of the rigid body. Thus, the FSI effect is not very strong, and can be neglected for simplification.
As shown in
Figure 11a, the hydrodynamic characteristics for the case of 1000 m/s are scaled up within 6.0–8.0 ms by comparing them with the case of 800 m/s. It is found that the high-frequency fluctuation of the hydrodynamic force remains when the supercavitating projectile is fully enveloped by the supercavity. The structural vibration does not disappear, even though the supercavitating projectile is fully covered by the supercavity and no more wetted. However, the position and direction of the cavitator changes continuously at a very high frequency, which causes a small amplitude and high-frequency hydrodynamic force acting on the supercavitating projectile. If the FSI effect is not taken into account, this phenomenon cannot happen.
With the increase of initial speed, the FSI effect becomes significant. For the case with the initial speed of 1200 m/s, the hydrodynamic characteristics of the supercavitating projectile, considering the FSI effect, are totally different from those of the rigid body. By considering the FSI effect, the motion and the structural vibration suddenly become unstable at about 2–3 times of the tail-slap period after being released. Furter, the higher the initial speed is, the earlier the supercavitating projectile loses stability. In these high-speed conditions, the hydrodynamic force is strong enough to cause the obvious structural vibration, which thoroughly changes the surrounding flow field and the motion characteristics. The unrecoverable structural deformation directly causes the trajectory to lose stability.
To further explain the suddenly loss of stability of the tail-slap motion of the supercavitating projectile, the evolution processes of the structural vibration of cases with different initial speeds are compared in
Figure 12. When the structural vibration takes place, the cavitator center swings relative to the mass center at a high frequency. Then, the displacement of the cavitator center changes at a high frequency, and the amplitude and period are used to represent the structural vibration state. At the released time (
t = 0 ms), no initial vibration is performed to the supercavitating projectile, and it just rotates around the mass center with an initial angular speed. According to
Figure 9 and
Figure 11, the angle of attack increases gradually because of the initial rotation, and the tail-slap motion is subsequently formed. Then, the structural vibration is gradually formed under the action of the hydrodynamic force coming from the tail-slap motion, and the amplitude increases with the calculation time.
As displayed in
Figure 12, the structural vibration can be continuous for cases with initial speeds of 800 and 1000 m/s, and the amplitudes converge to an approximately unchanged value. In addition, the convergent value of the amplitude increases with the initial value. For cases with initial speeds of 1200, 1400, and 1600 m/s, the overlarge amplitude of structural vibration results in an unrecoverable structural deformation, and causes the divergence of the structural vibration. It is worth noting that cases with a higher initial speed will diverge in a shorter time. Further, the frequency of the structural vibration is very high, and is about 10 times higher than that of the tail-slap motion. The frequency of the tail-slap motion corresponds to that of the hydrodynamic force. Then, the structural vibration is formed under the alternating hydrodynamic force. The shown frequency is mainly determined by the inherent characteristics, and is not significantly influenced by the initial speed.
To further analyze the structural vibration characteristics of the supercavitating projectile during the tail-slap motion, the Fast Fourier Transform is performed. Then, the frequency domain characteristic of the elastic and rigid supercavitating projectiles under different initial speed conditions are obtained and compared. The comparison of the case with an initial speed of 1600 m/s is taken as an example and displayed in
Figure 13. For the case ignoring the FSI effect, only one basic frequency of about 200 Hz is found from the frequency spectrum of the hydrodynamic force, which is identical to the frequency of the tail-slap motion. For the case considering the FSI effect, two basic frequencies are observed in the frequency spectrum of the hydrodynamic force; one is 170 Hz, and the other is1469 Hz. The smaller one corresponds to the tail-slap motion, and the higher one is the first-order bending intrinsic frequency of the supercavitating projectile obtained by modal analysis. When considering the FSI effect, the frequency of the tail-slap motion slightly decreases. By considering the FSI effect, the supercavitating projectile is regarded as an elastic body. It is equivalent to adding a buffer between the supercavitating projectile and water when puncturing the supercavity. In addition, the low-frequency hydrodynamic force motivates the intrinsic modality of the supercavitating projectile, and a high frequency structural vibration is formed.
According to the numerical results of the cases with different initial speeds, the changes of the pitch angle of the nonrigid and rigid supercavitating projectiles are extracted, respectively, and compared in
Figure 14. When the initial speed is equal to 800 m/s, the change of the pitch angle along with time of the supercavitating projectile considering the FSI effect is approximately the same as that of the rigid one, and the tail-slap motion is stable. It is demonstrated that the FSI effect exerts less influence on the motion characteristics of the supercavitating projectile with an initial speed of 800 m/s, and does not break the stability of the trajectory.
As the initial speed increases, the influence of the FSI effect becomes more and more significant, and results in the motion characteristics of the supercavitating projectile being obviously different from those of the rigid supercavitating projectile, and even causes the divergences of the tail-slap motion and structural vibration. For the case with an initial speed of 1200 m/s, the motion of the supercavitating projectile becomes unstable in about 15.0 ms. After being released, the tail-slap motion is formed step by step, and the amplitude of the angle of attack increases gradually. The deformation of the supercavitating projectile is positively related to the hydrodynamic force, and the hydrodynamic force is mainly determined by the speed and the angle of attack. For the high-speed cases, the threshold value of the hydrodynamic force to produce an unrecoverable deformation can be attained at a small angle of attack. However, for the low-speed cases, a large enough angle of attack is essential to reach to the threshold value. Therefore, the higher the initial speed is, the earlier the motion stability is destroyed.
During the tail-slap motion, the speed of the supercavitating projectile decreases continuously because of the drag force coming from the water. According to the calculation results of considering and ignoring the FSI effect, the speed decrease laws of supercavitating projectiles with different initial speeds are extracted, and these are compared in
Figure 15. The value of each line at time zero denotes the initial speed. In cases both considering and ignoring the FSI effect, the supercavitating projectiles fly with a gradually decreasing speed, and no obvious difference is found between the change laws of speed of the two cases if the motion stability is not broken. For the calculated range of the speed and time, the FSI effect exerts less influence on the change law of the speed when the initial speed is no more than 1000 m/s. Moreover, if the initial speed exceeds 1200 m/s, the tail-slap motion and structural vibration of the supercavitating projectile cannot be maintained all the time because of the overlarge structural deformation. In this condition, the supercavitating projectile greatly deviates from the supercavity, and receives a large drag and upsetting moment. The upsetting moment leads to the further rotation of the supercavitating projectile, and a bigger angle of attack is formed. Resultantly, the drag increases in a positive feedback mode. Then, the speed decreases sharply when the motion stability is broken, and the supercavitating projectile is out of operation.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}