

Local Path Planning for Autonomous Vehicles Based on the Natural Behavior of the Biological Action-Perception Motion

 ,
,  , ,
, ,  , and
, and 
Abstract
:1. Introduction
2. Literature Review
- Space configuration. These algorithms seek to decompose the surrounded space of the vehicle into cells, for each collision-free cell a candidate solution is applied, such as lattices, Voronoi diagrams, or sampling points, to mention a few. The main purpose of them is to find the correct configuration of connected cells to reach a local way-point avoiding collision. This category of algorithms has the advantage that they are fast; however, in many cases, the given solutions are not dynamically feasible for the vehicle. Additionally, the obstacles and the state of the ego-vehicle have a great influence on how to decompose the space [23,24,25].
- Path-finders. They are based on the search of a path between two nodes inside a graph. The main task is to build a graph and to find the best path in terms of at least one cost function such as distance or traveled time. There are three main algorithms into the state-of-art: A*, Dijkstra, and Rapidly Random Tree (RRT) algorithms. The first two are used mainly when the environment is previously known while the RRT-based algorithms are used in unknown environments. As well as the space configuration algorithms, one of the main drawbacks is that the given solutions may not be feasible for the vehicle [26,27,28].
- Attractive and repulsive forces. They are based on the creation of artificial forces that lead the vehicle to the desired target and deviates from obstacles or interest areas. The sum of forces results in the new state of the vehicle’s motion. There are some drawbacks of these algorithms, for instance, while a search for a solution is performed, the algorithm can be stuck into local minima or the generated solution may be unstable for the vehicle [29].
- Curves. They are based mainly on parametric or/and semi-parametric curves. According to the state of the vehicle and the driveway ahead, a set of curves are generated according to a specific mathematical form such as clothoid, bezier curves, and splines, among others. Inside this category, there are mainly two approaches for the implementation of these algorithms: point-free scheme and point-to-point scheme. In the first one, the curves are generated to let the vehicle follow a feasible kinematic/dynamic trajectory with a given legal maneuver, whereas in the point-to-point scheme the curves are used to adjust the trajectory between two waypoints. Limitations of these techniques belongs to the generated curves, which are candidates to represent a local path for the vehicle. In other words, each one must be analyzed to ensure a kinematic/dynamic feasibility and free collision path [30,31]. As a result, the practical implementation of the resulting local path in real-time digital processors is a challenge.
- Artificial intelligence schemes. They are a set of algorithms that solves the problem with a certain level of human reasoning. There are several techniques used to solve the problem of local path planning, for instance, fuzzy logic, artificial neural networks, swarm intelligence, or genetic algorithms [32,33]. The main advantage of those schemes is that accurate mathematical models are not needed for their design stage. For instance, fuzzy logic (FL) depends on the designer’s know-how, and its design stages are divided on: fuzzification, interpretation or inference and defuzzification. Differing this straightforward route, the FL’s complication differs between the number and type of rules, the defuzzification algorithm, and the amount and variety of the membership functions. Indeed, those can be as uncomplicated or difficult as the designer’s abilities. More details of artificial intelligent schemes applied on local path development of autonomous vehicles can be found in [34,35] and the references therein. Unfortunately, the implementation of these artificial intelligence techniques into real time processors is still bulky and complicated.
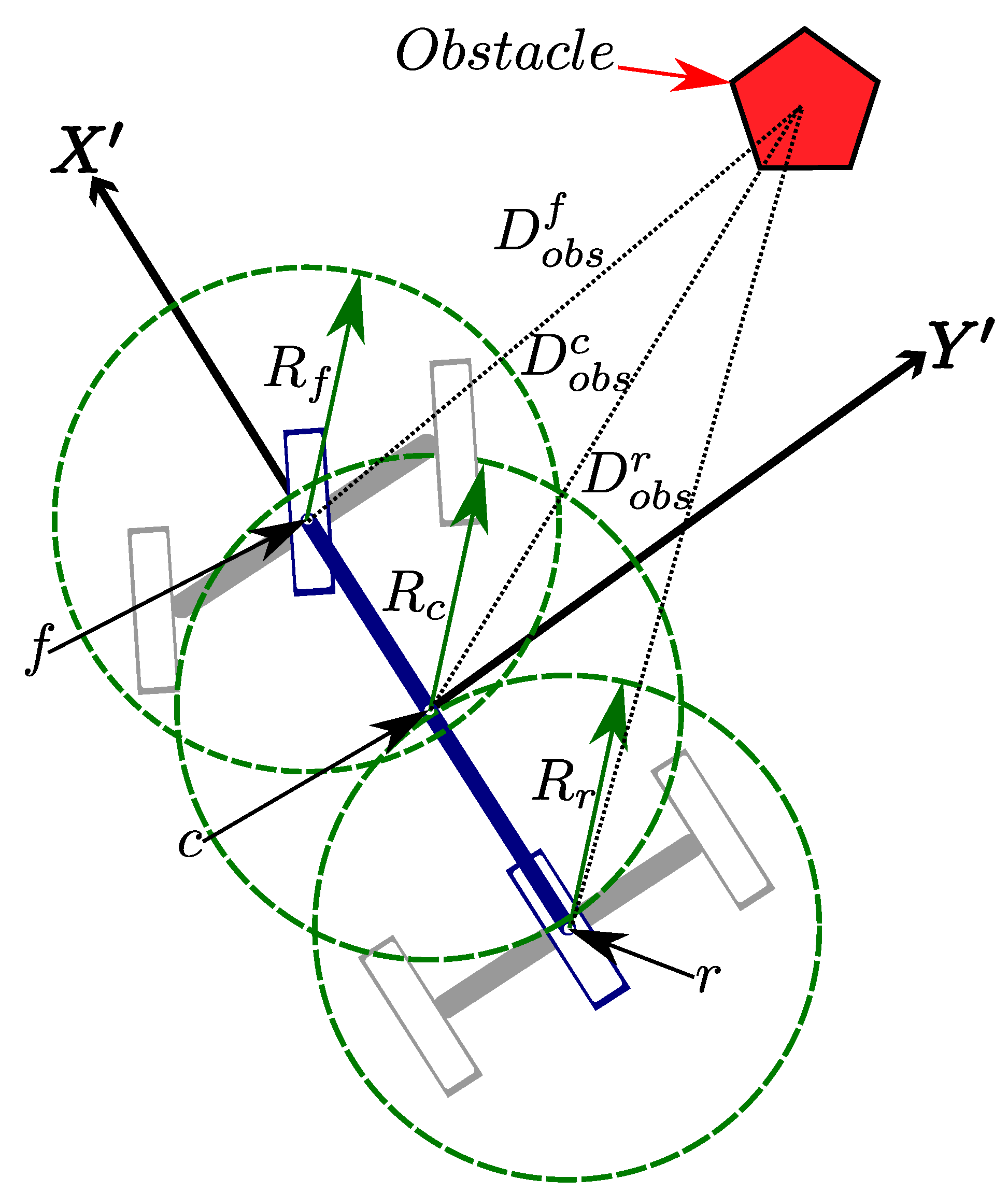
- A novel MP’s local path planning for autonomous vehicles, based on attractor and repellor, called Vehicle Attractor Dynamic Approach (VADA) is reported in this manuscript. The proposal guarantees a free-obstacle local path along a reference global one given by a mission planner.
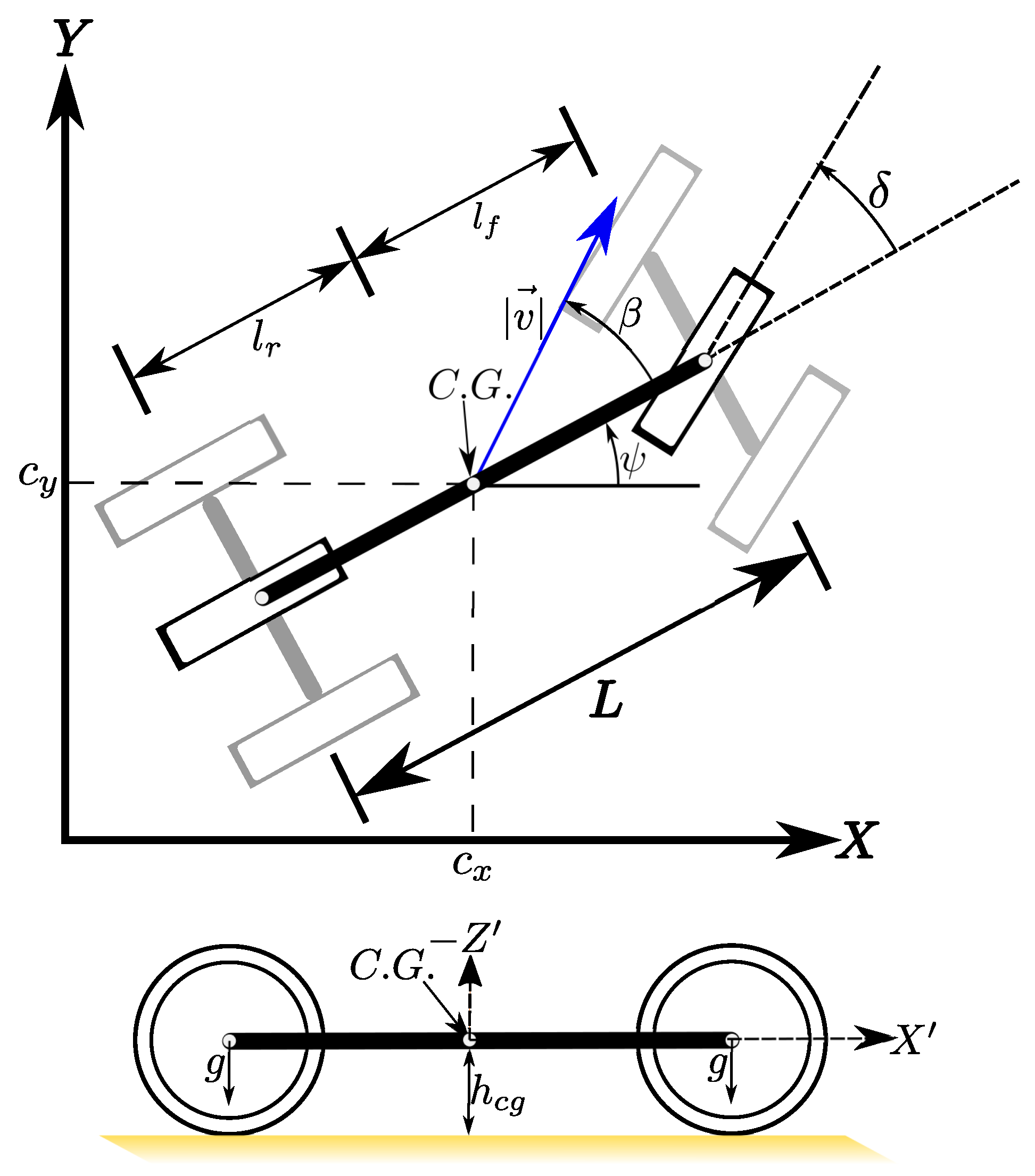
- To represent the load transfer forces generated by the longitudinal acceleration and the effect in the cornering stiffness of the friction coefficient, in this work the Single-Track Model is used. It is necessary to mention that, and with the main aim to develop a manageable mode, restrictions to under- or oversteer, nor driving close to physical capacities of the vehicle were given.
- Numerical results of the proposed VADA obtained in Carla Simulator for different driving scenarios are reported. Results shown that the proposed technique is able to generate a velocity profile and a free-collision trajectory.
3. Materials and Methods
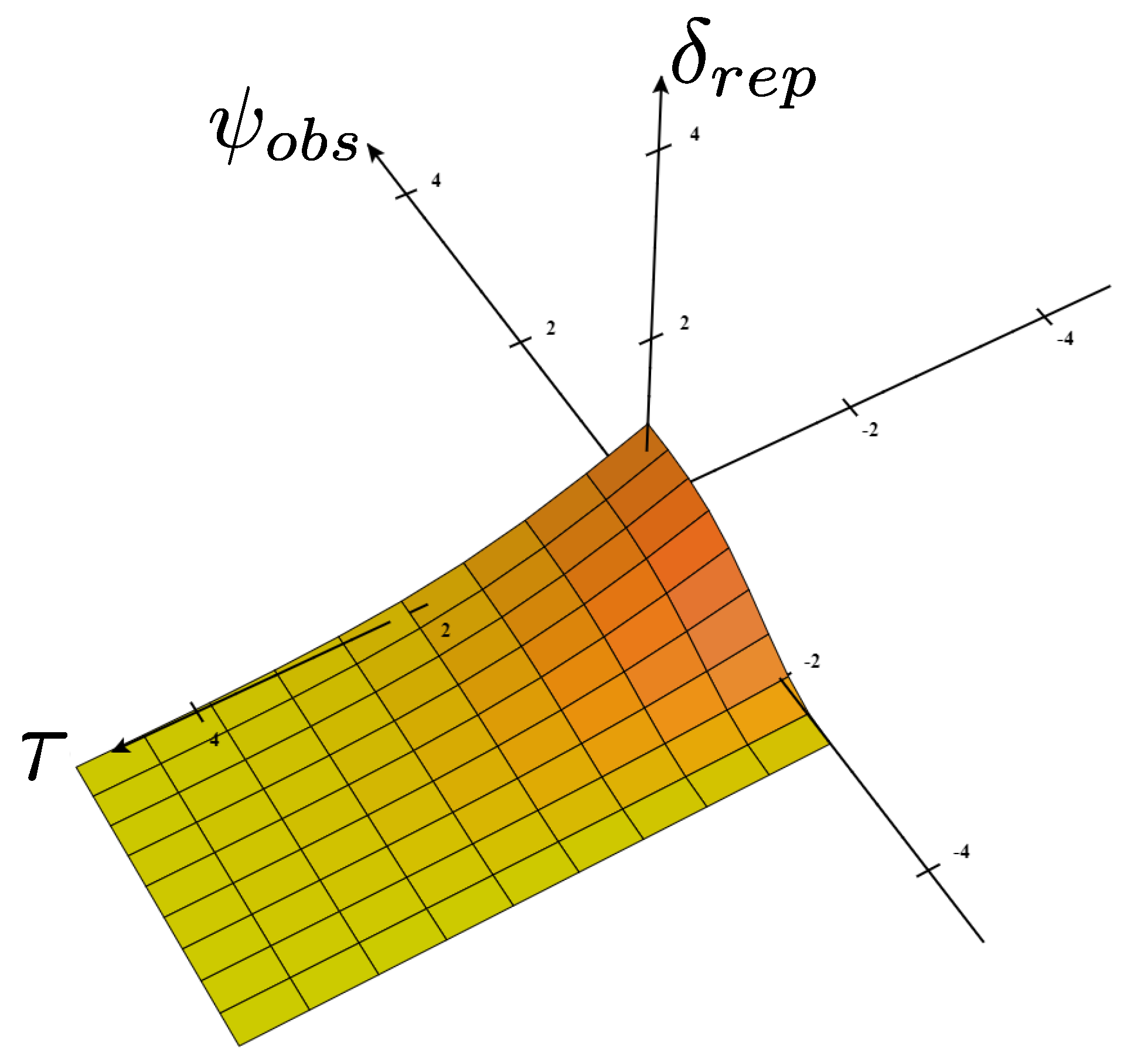
3.1. The Classic Attractor Dynamic Approach
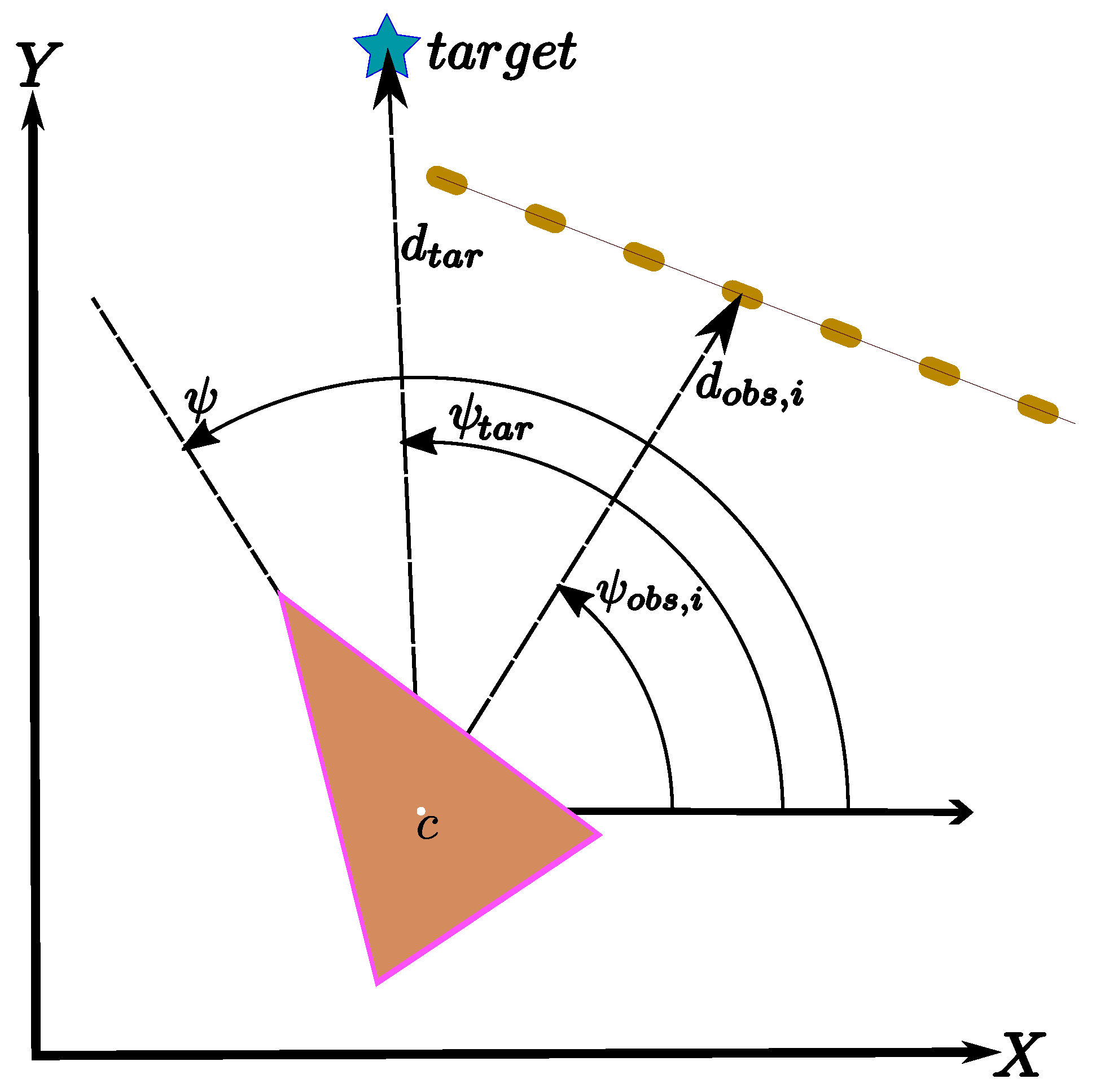
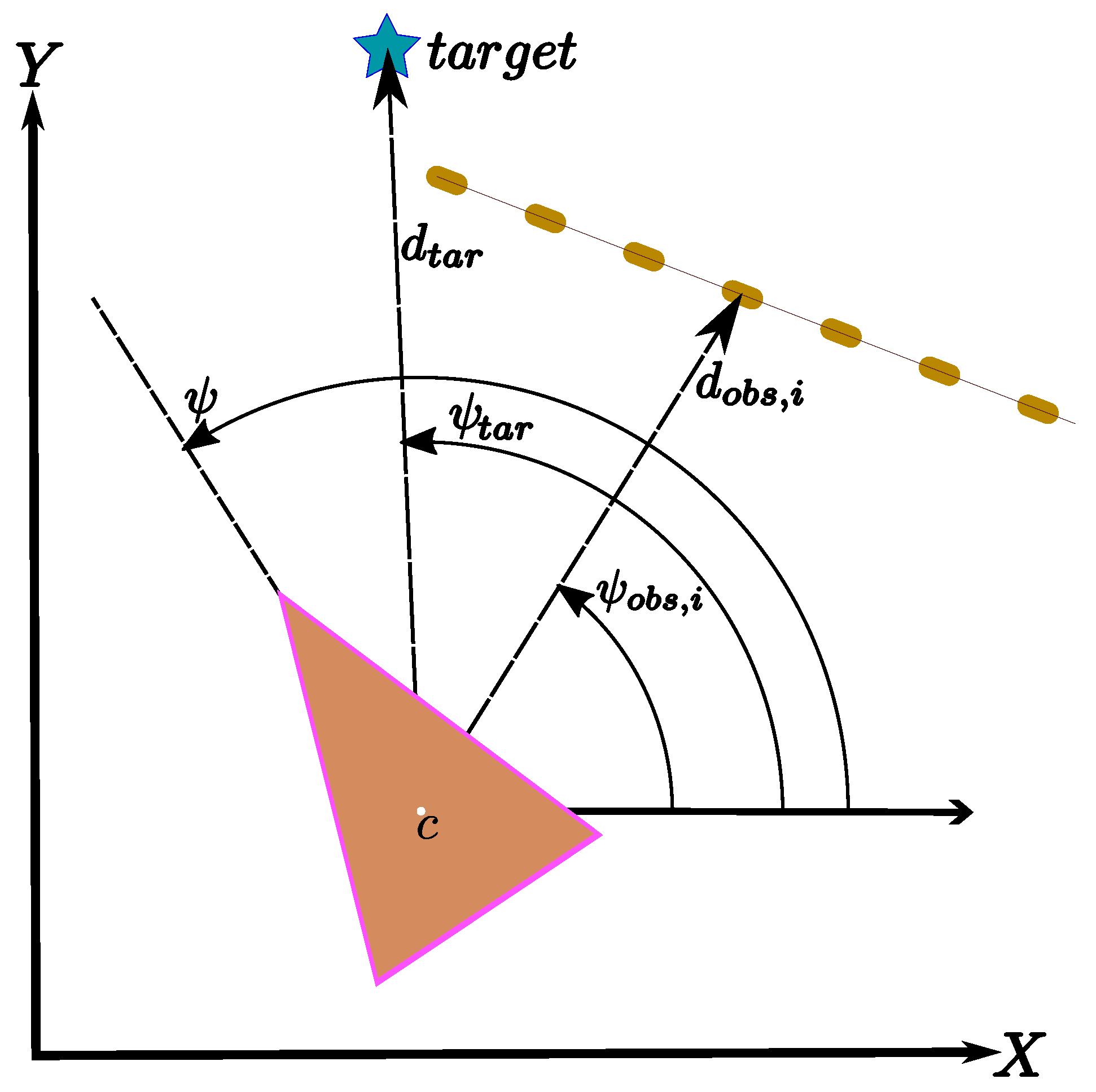
3.2. The Attractor Dynamic Approach for Non-Holonomic Vehicles
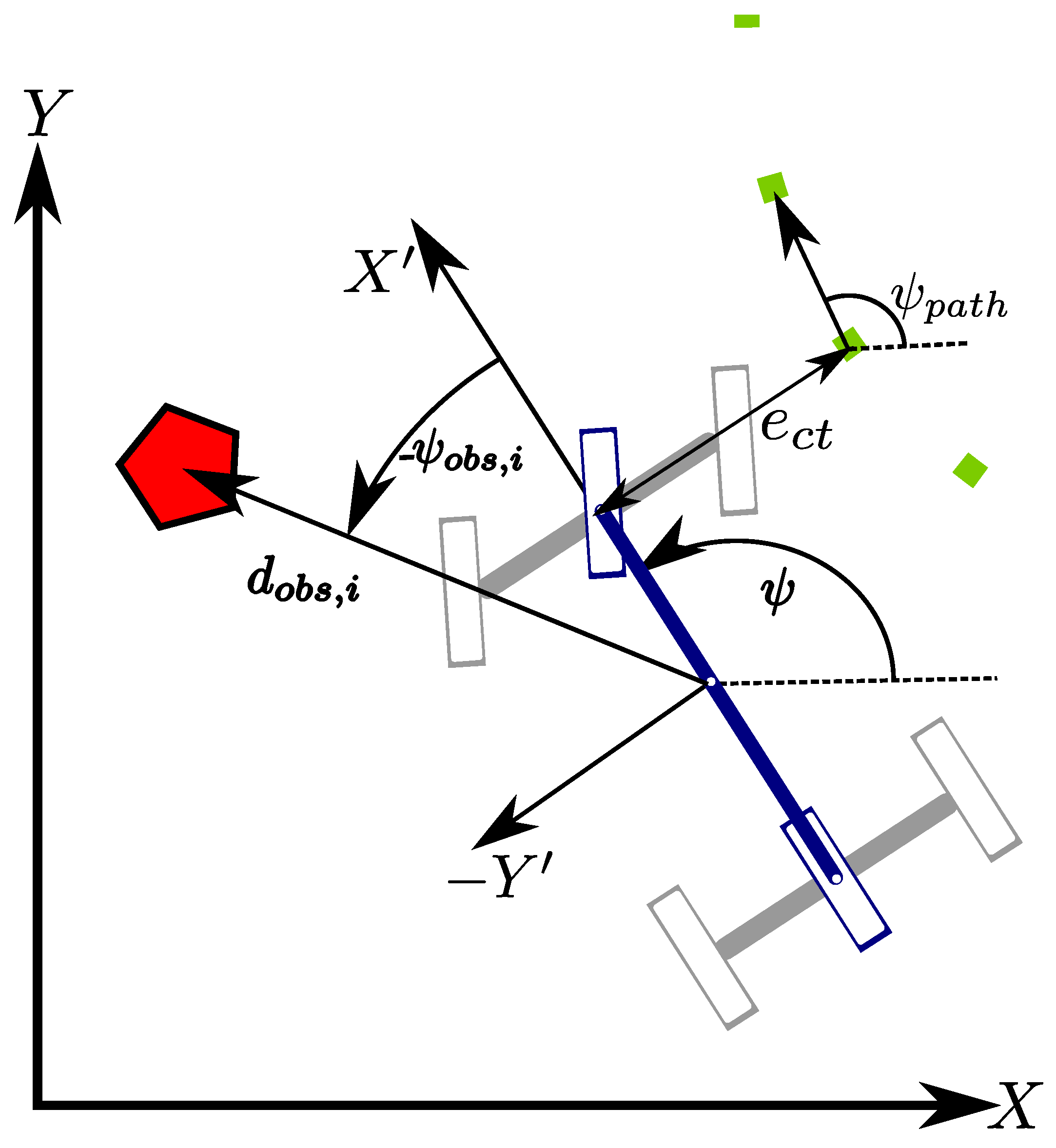
3.3. The Lateral Vehicle Dynamic Model
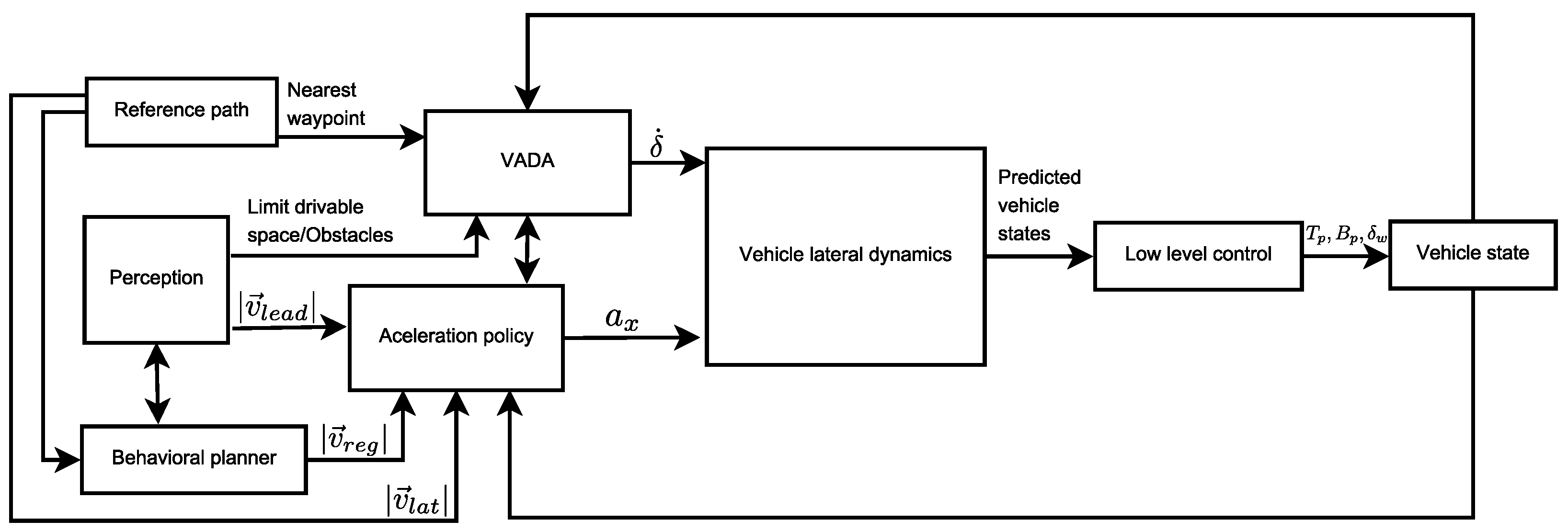
3.4. Local Path Planning Based on VADA
- Maximum curvature velocity: It is the maximum velocity that the ego-vehicle can reach when is driving along a curve. It is delimited by the maximum lateral acceleration and the road’s curvature as shown in Equation (23)
- Maximum regulatory velocity: It is managed by the regulatory elements of the road such as stop & yield signs, traffic lights, velocity limit signals, among others. The information comes from level (II) of the MP.
- Vehicle leader’s maximum velocity: It is defined as the maximum velocity to keep a constant time gap from a preceding vehicle to the ego-vehicle. Such velocity is determined by integrating a longitudinal desired acceleration which is calculated according to [53].
| Algorithm 1: Local path planning: trajectory and velocity profile generation. |
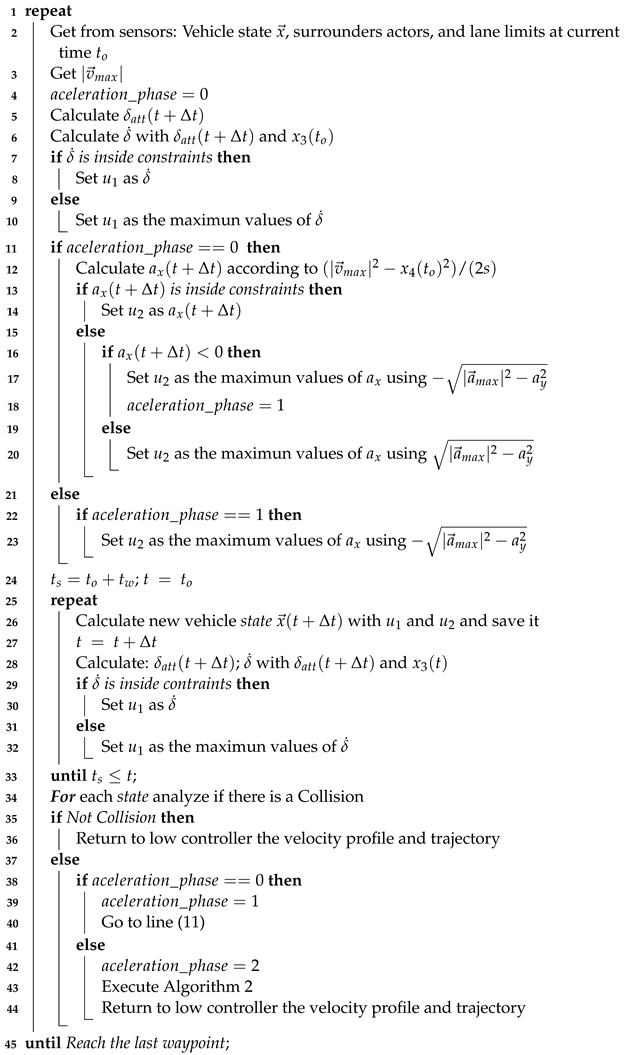 |
| Algorithm 2: Local path planning (Continue). |
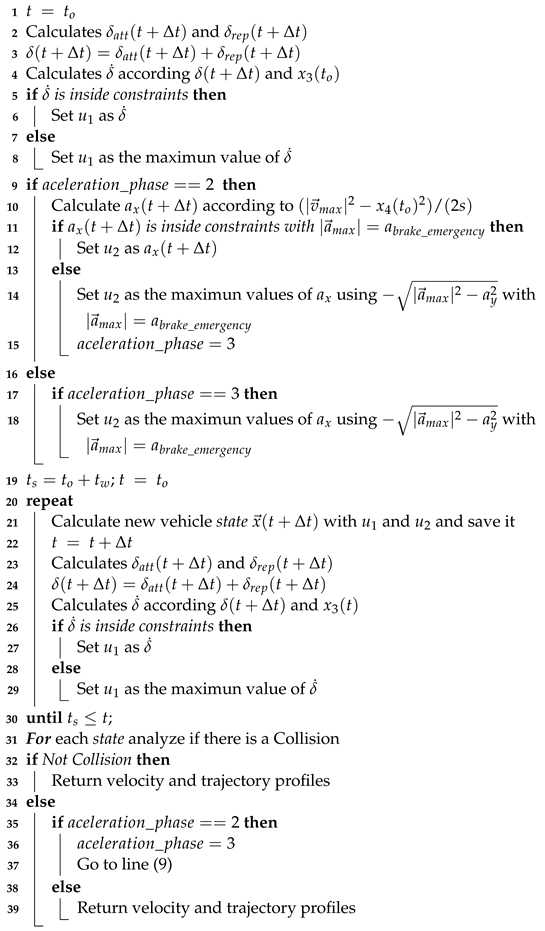 |
3.5. Path Planning Environment
4. Results and Discussion
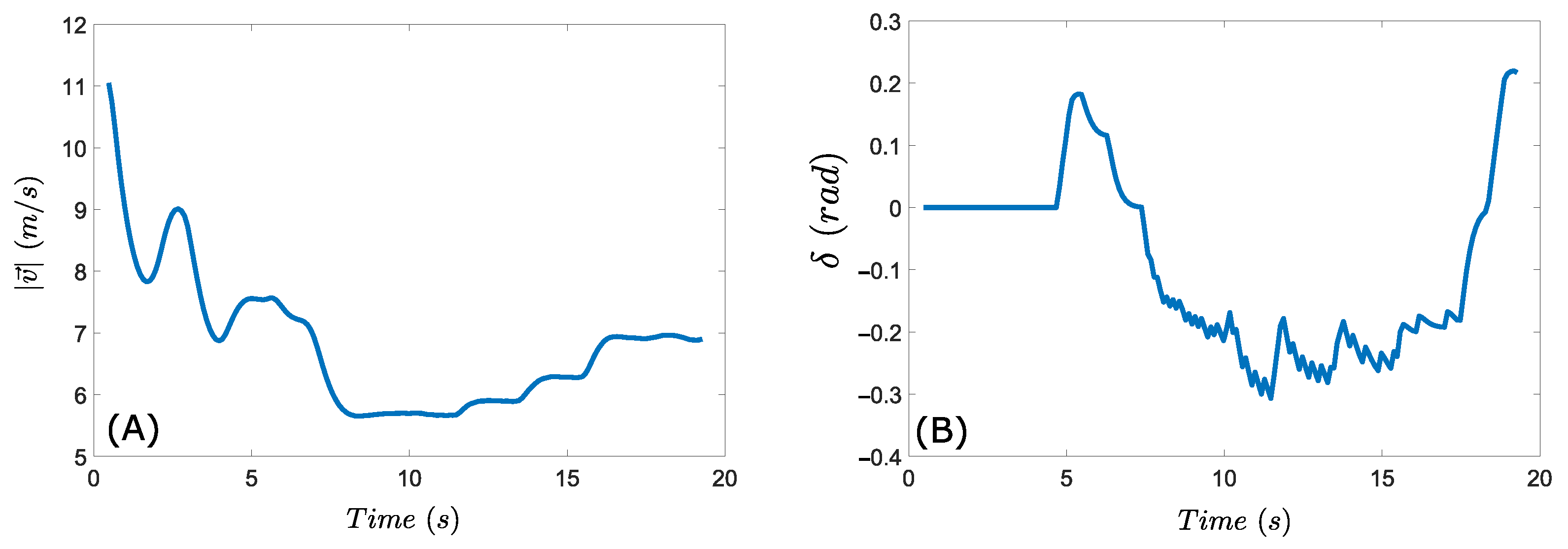
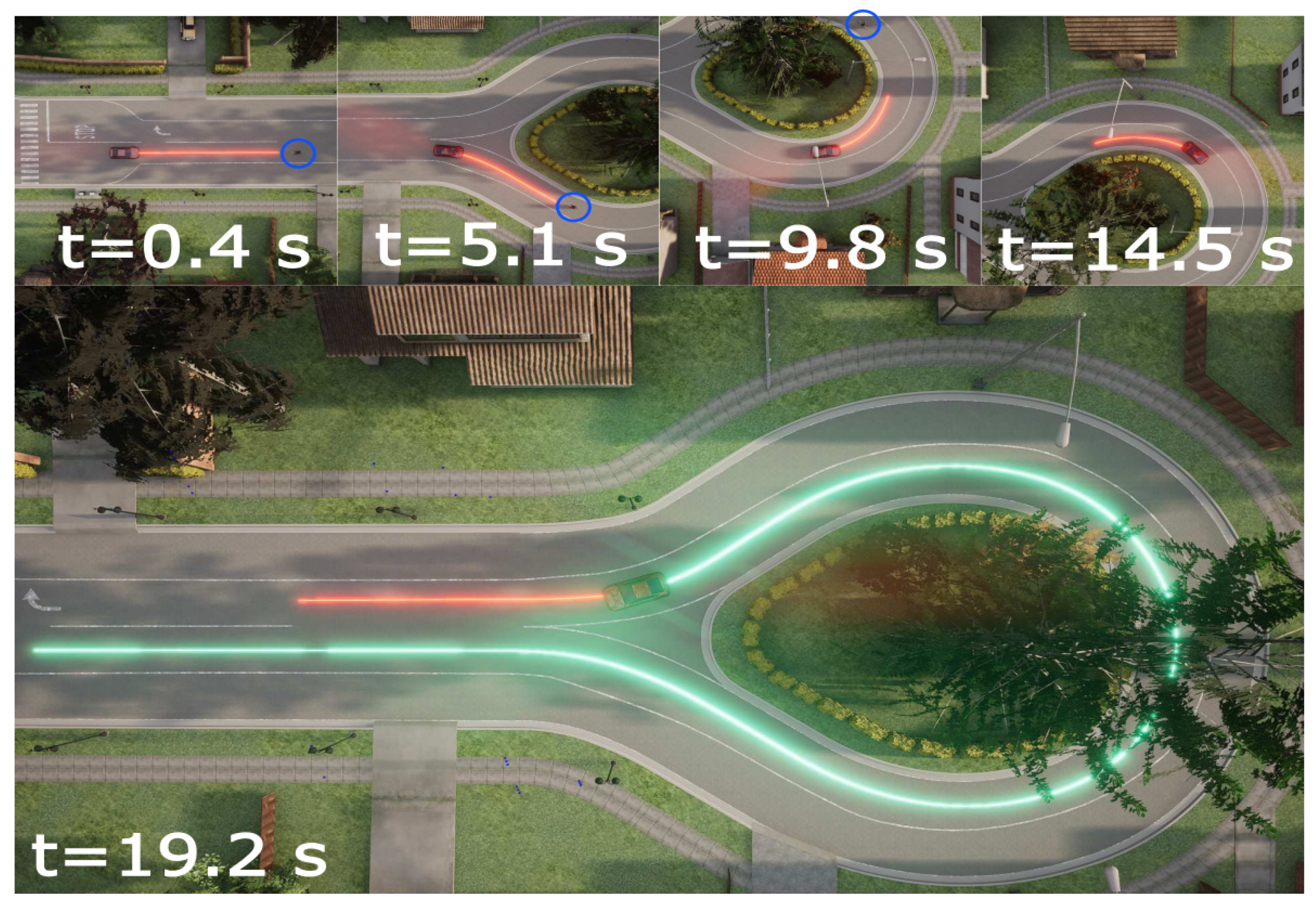
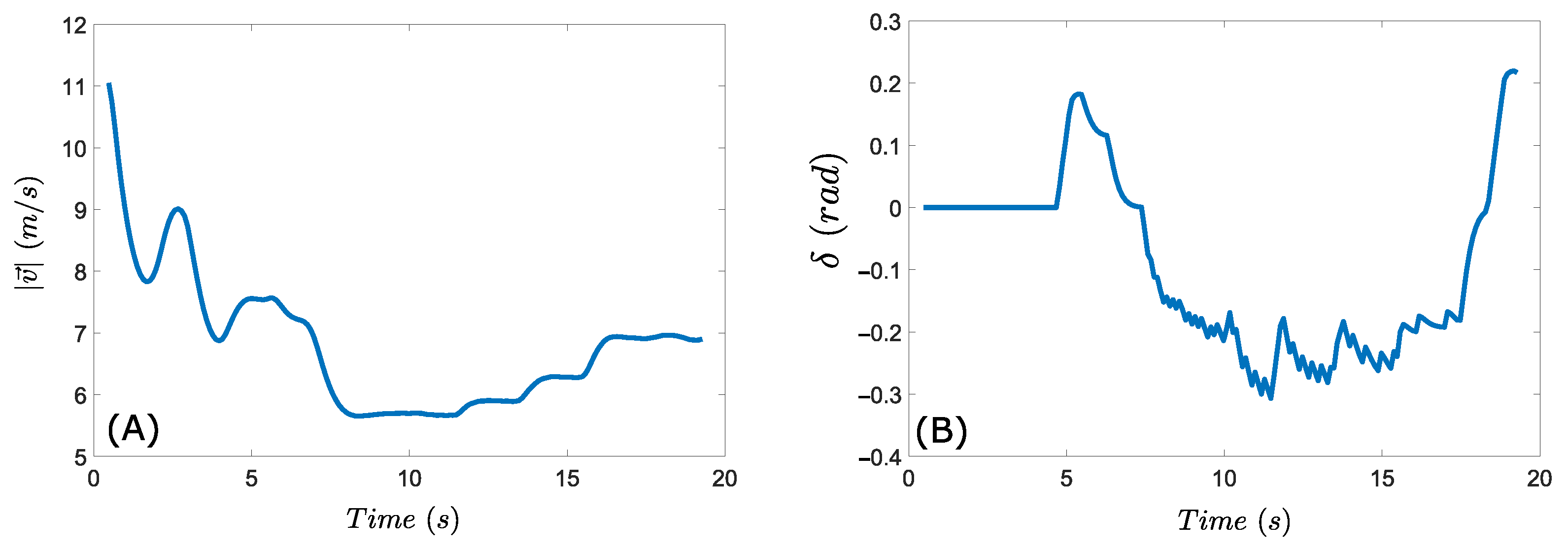
4.1. CS1: Following Reference Global Path, and Velocity Adjust
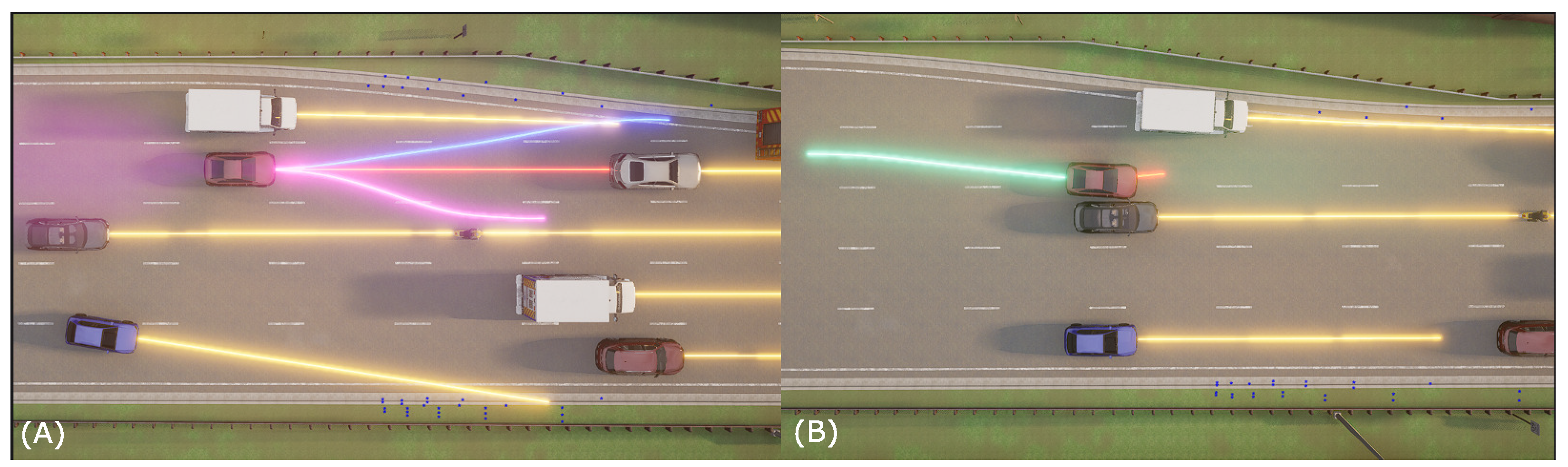
4.2. CS2: Evading a Static Obstacle
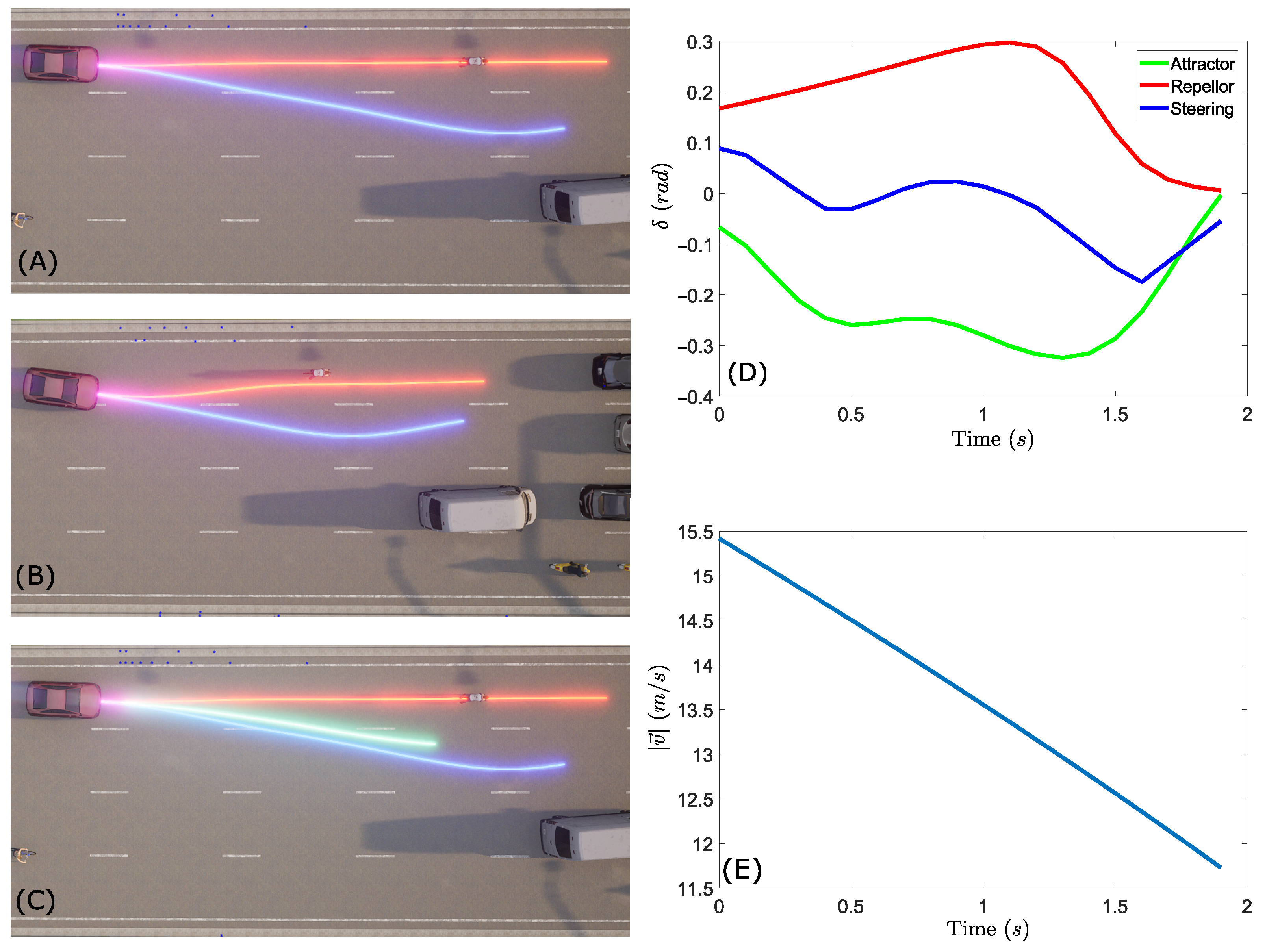
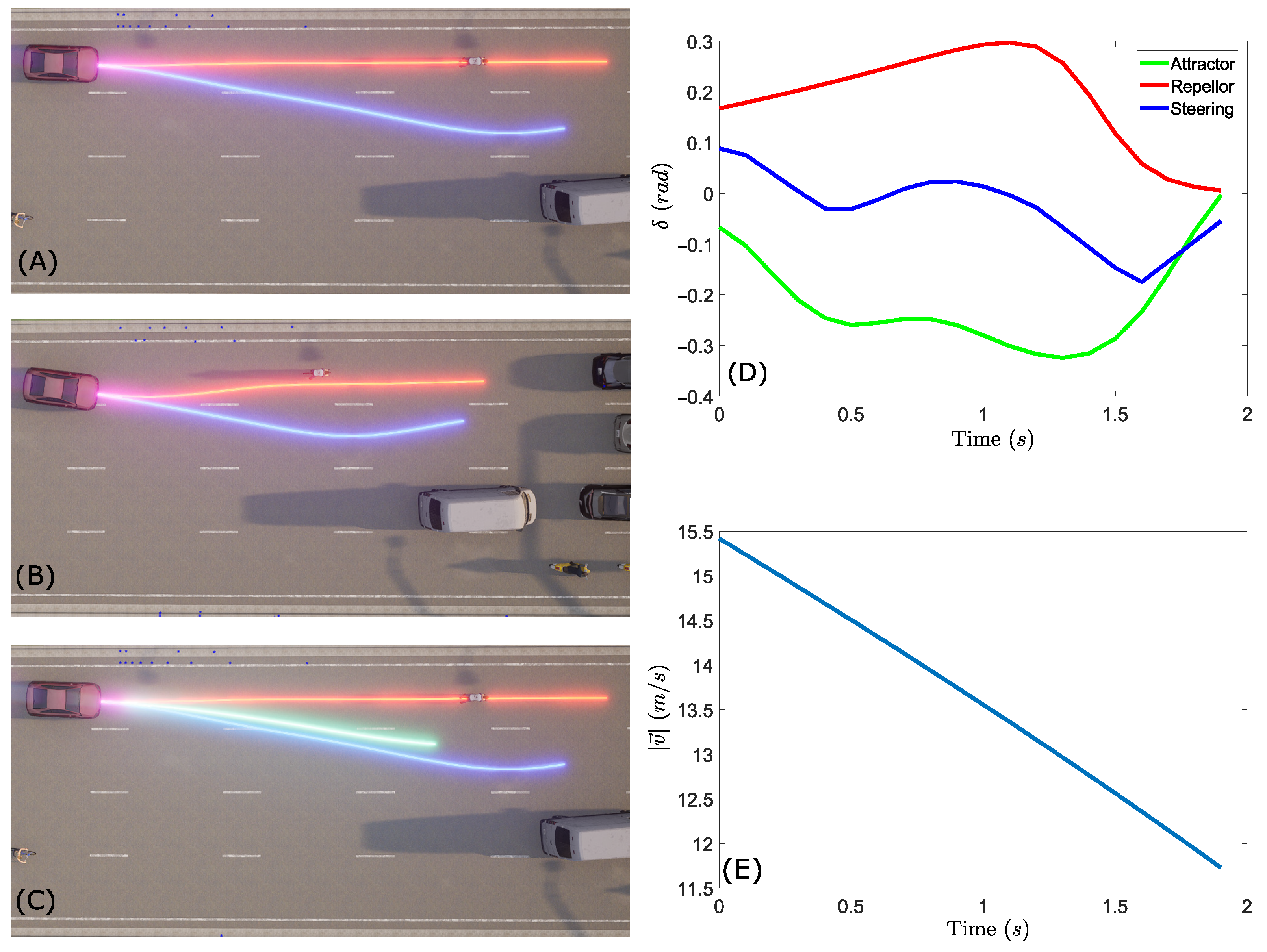
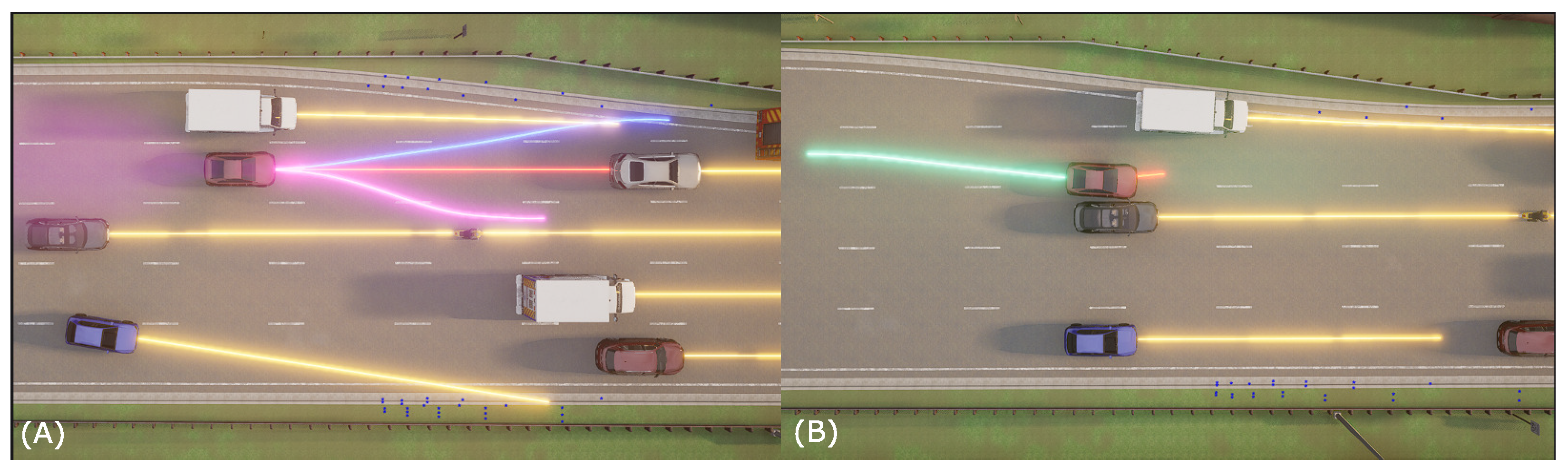
4.3. CS3: Evading Dynamic Obstacles
- To take into account both accelerations and decelerations to avoid collisions; by choosing the safest option for the ego-vehicle.
- Set a dynamic reference path, for example, when the vehicle generates a trajectory that converges to another lane, in order to change the reference route so that it is established in that lane and thus, the ego-vehicle converges to that lane.
- To move the location of repellers for dynamic obstacles along its predicted trajectory. This would take into account the actual location of the dynamic object at the time of the collision and would adjust the location of the repeller accordingly. This would ensure that the repeller is always in the correct location to avoid the dynamic object. This approach may be more computationally expensive, but it may provide a more accurate collision response.
- It is possible to extend the present work by incorporating other types of velocity profiles.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MP | Motion Planning |
| ADA | Attractor Dynamic Approach |
| RRT | Rapidly Random Tree |
| APF | Artificial Potential Field |
| FL | Fuzzy Logic |
| MPC | Model Predictive Control |
| VADA | Vehicle Attractor Dynamic Approach |
| CS1 | Case study 1 |
| CS2 | Case study 2 |
| CS3 | Case study 3 |
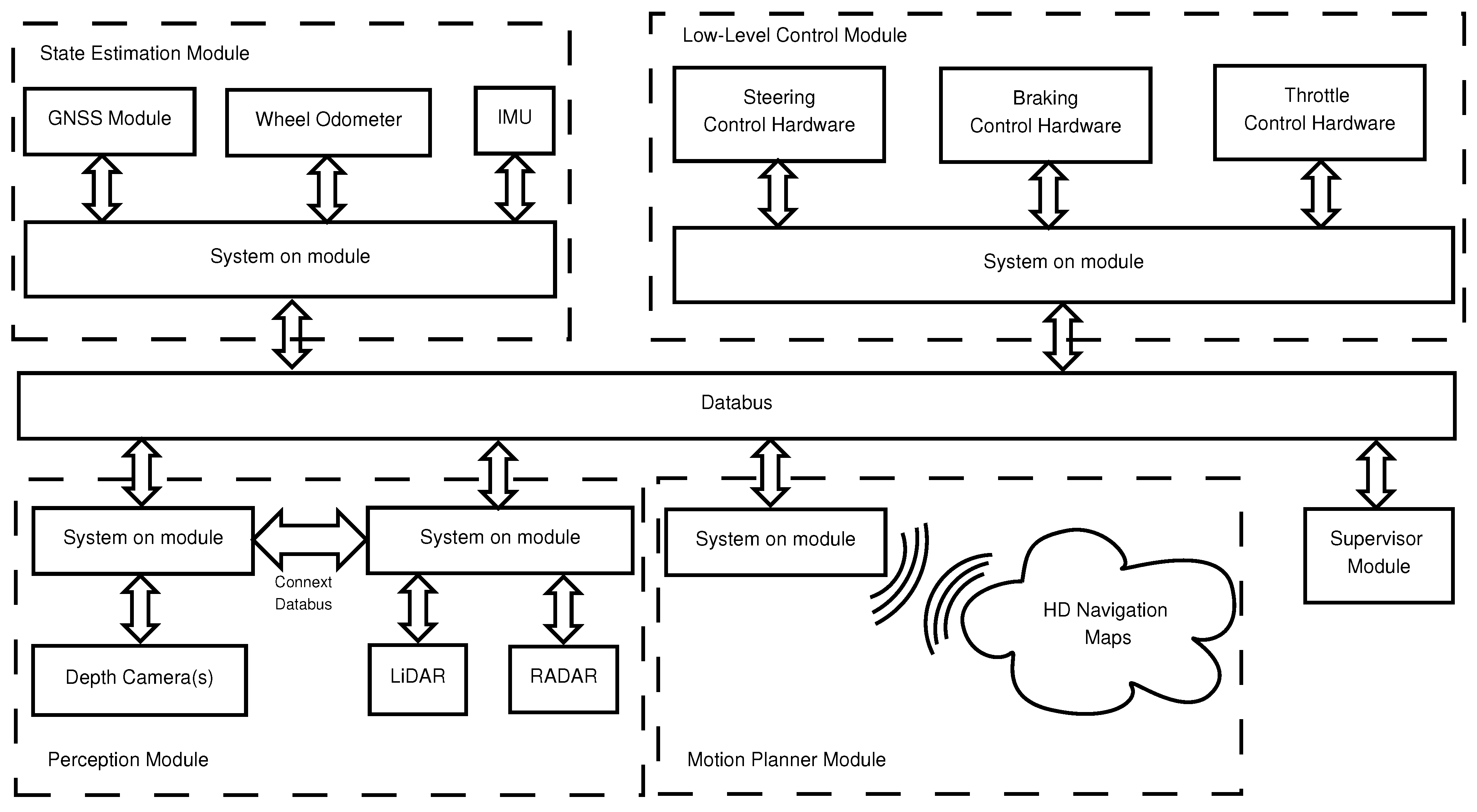
| SOM | System On Module |
| IMU | Inertial Measurement Unit |
| LiDAR | Laser Imaging Detection and Ranging |
| GPU | Graphics Processing unit |
| GNSS | Global Navigation Satellite System |
| FPGA | Field Programmable Gate Array |
Appendix A

References
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 323–337. [Google Scholar] [CrossRef]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Guo, H.; Cao, D.; Chen, H.; Lv, C.; Wang, H.; Yang, S. Vehicle dynamic state estimation: State of the art schemes and perspectives. IEEE/CAA J. Autom. Sin. 2018, 5, 418–431. [Google Scholar] [CrossRef]
- Musa, A.; Pipicelli, M.; Spano, M.; Tufano, F.; De Nola, F.; Di Blasio, G.; Gimelli, A.; Misul, D.A.; Toscano, G. A Review of Model Predictive Controls Applied to Advanced Driver-Assistance Systems. Energies 2021, 14, 7974. [Google Scholar] [CrossRef]
- Huang, Z. Application of interval state estimation in vehicle control. Alex. Eng. J. 2022, 61, 911–916. [Google Scholar] [CrossRef]
- Pendleton, S.D.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.H.; Rus, D.; Ang, M.H. Perception, planning, control, and coordination for autonomous vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Shi, W.; Alawieh, M.B.; Li, X.; Yu, H. Algorithm and hardware implementation for visual perception system in autonomous vehicle: A survey. Integration 2017, 59, 148–156. [Google Scholar] [CrossRef]
- Rasouli, A.; Tsotsos, J.K. Autonomous vehicles that interact with pedestrians: A survey of theory and practice. IEEE Trans. Intell. Transp. Syst. 2019, 21, 900–918. [Google Scholar] [CrossRef] [Green Version]
- Hou, Y.; Wang, C.; Wang, J.; Xue, X.; Zhang, X.L.; Zhu, J.; Wang, D.; Chen, S. Visual Evaluation for Autonomous Driving. IEEE Trans. Vis. Comput. Graph. 2021, 28, 1030–1039. [Google Scholar] [CrossRef]
- Aradi, S. Survey of deep reinforcement learning for motion planning of autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 23, 740–759. [Google Scholar] [CrossRef]
- Lim, W.; Lee, S.; Sunwoo, M.; Jo, K. Hierarchical trajectory planning of an autonomous car based on the integration of a sampling and an optimization method. IEEE Trans. Intell. Transp. Syst. 2018, 19, 613–626. [Google Scholar] [CrossRef]
- Urmson, C.; Anhalt, J.; Bagnell, D.; Baker, C.; Bittner, R.; Clark, M.; Dolan, J.; Duggins, D.; Galatali, T.; Geyer, C.; et al. Autonomous driving in urban environments: Boss and the urban challenge. J. Field Robot. 2008, 25, 425–466. [Google Scholar] [CrossRef] [Green Version]
- Soulignac, M. Feasible and optimal path planning in strong current fields. IEEE Trans. Robot. 2010, 27, 89–98. [Google Scholar] [CrossRef]
- Sánchez-Ibáñez, J.R.; Pérez-del Pulgar, C.J.; García-Cerezo, A. Path Planning for Autonomous Mobile Robots: A Review. Sensors 2021, 21, 7898. [Google Scholar] [CrossRef]
- Qian, L.; Xu, X.; Zeng, Y.; Li, X.; Sun, Z.; Song, H. Synchronous Maneuver Searching and Trajectory Planning for Autonomous Vehicles In Dynamic Traffic Environments. IEEE Intell. Transp. Syst. Mag. 2020, 14, 57–73. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Sun, Z.; Cao, D.; He, Z.; Zhu, Q. Real-time trajectory planning for autonomous urban driving: Framework, algorithms, and verifications. IEEE/ASME Trans. Mechatron. 2015, 21, 740–753. [Google Scholar] [CrossRef]
- Li, X.; Rosman, G.; Gilitschenski, I.; Araki, B.; Vasile, C.I.; Karaman, S.; Rus, D. Learning an Explainable Trajectory Generator Using the Automaton Generative Network (AGN). IEEE Robot. Autom. Lett. 2021, 7, 984–991. [Google Scholar] [CrossRef]
- Li, X.; Sun, Z.; Cao, D.; Liu, D.; He, H. Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles. Mech. Syst. Signal Process. 2017, 87, 118–137. [Google Scholar] [CrossRef]
- Pérez, S.S.; López, J.M.G.; Jimenez Betancourt, R.O.; Villalvazo Laureano, E.; Solís, J.E.M.; Sánchez Cervantes, M.G.; Ochoa Guzmán, V.J. A Low-Cost Platform for Modeling and Controlling the Yaw Dynamics of an Agricultural Tractor to Gain Autonomy. Electronics 2020, 9, 1826. [Google Scholar] [CrossRef]
- Schöner, G.; Spencer, J. Dynamic Thinking: A Primer on Dynamic Field Theory; Oxford University Press: Oxford, UK, 2016. [Google Scholar]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Claussmann, L.; Revilloud, M.; Gruyer, D.; Glaser, S. A review of motion planning for highway autonomous driving. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1826–1848. [Google Scholar] [CrossRef] [Green Version]
- Mentasti, S.; Matteucci, M. Multi-layer occupancy grid mapping for autonomous vehicles navigation. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar]
- De Lima, D.A.; Pereira, G.A.S. Navigation of an autonomous car using vector fields and the dynamic window approach. J. Control Autom. Electr. Syst. 2013, 24, 106–116. [Google Scholar] [CrossRef]
- Sedighi, S.; Nguyen, D.V.; Kapsalas, P.; Kuhnert, K.D. Implementing Voronoi-based Guided Hybrid A* in Global Path Planning for Autonomous Vehicles*. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 3845–3852. [Google Scholar] [CrossRef]
- Yijing, W.; Zhengxuan, L.; Zhiqiang, Z.; Zheng, L. Local path planning of autonomous vehicles based on A* algorithm with equal-step sampling. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 7828–7833. [Google Scholar]
- Feraco, S.; Luciani, S.; Bonfitto, A.; Amati, N.; Tonoli, A. A local trajectory planning and control method for autonomous vehicles based on the RRT algorithm. In Proceedings of the 2020 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 18–20 November 2020; pp. 1–6. [Google Scholar]
- Zong, C.; Han, X.; Zhang, D.; Liu, Y.; Zhao, W.; Sun, M. Research on local path planning based on improved RRT algorithm. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2086–2100. [Google Scholar] [CrossRef]
- Wang, P.; Gao, S.; Li, L.; Sun, B.; Cheng, S. Obstacle avoidance path planning design for autonomous driving vehicles based on an improved artificial potential field algorithm. Energies 2019, 12, 2342. [Google Scholar] [CrossRef] [Green Version]
- Choi, J.W.; Curry, R.E.; Elkaim, G.H. Continuous Curvature Path Generation Based on Bézier Curves for Autonomous Vehicles. Int. J. Appl. Math. 2010, 40, 2. [Google Scholar]
- Suzuki, T.; Usami, R.; Maekawa, T. Automatic Two-Lane Path Generation for Autonomous Vehicles Using Quartic B-Spline Curves. IEEE Trans. Intell. Veh. 2018, 3, 547–558. [Google Scholar] [CrossRef]
- Song, Q.; Zhao, Q.; Wang, S.; Liu, Q.; Chen, X. Dynamic Path Planning for Unmanned Vehicles Based on Fuzzy Logic and Improved Ant Colony Optimization. IEEE Access 2020, 8, 62107–62115. [Google Scholar] [CrossRef]
- Grigorescu, S.M.; Trasnea, B.; Marina, L.; Vasilcoi, A.; Cocias, T. NeuroTrajectory: A Neuroevolutionary Approach to Local State Trajectory Learning for Autonomous Vehicles. IEEE Robot. Autom. Lett. 2019, 4, 3441–3448. [Google Scholar] [CrossRef] [Green Version]
- Elsayed, H.; Abdullah, B.A.; Aly, G. Fuzzy logic based collision avoidance system for autonomous navigation vehicle. In Proceedings of the 2018 13th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 18–19 December 2018; pp. 469–474. [Google Scholar]
- Hamid, U.Z.A.; Saito, Y.; Zamzuri, H.; Rahman, M.A.A.; Raksincharoensak, P. A review on threat assessment, path planning and path tracking strategies for collision avoidance systems of autonomous vehicles. Int. J. Veh. Auton. Syst. 2018, 14, 134–169. [Google Scholar] [CrossRef]
- Feraco, S.; Bonfitto, A.; Khan, I.; Amati, N.; Tonoli, A. Optimal Trajectory Generation Using an Improved Probabilistic Road Map Algorithm for Autonomous Driving. Am. Soc. Mech. Eng. 2020, 83938, V004T04A006. [Google Scholar]
- Fu, M.; Zhang, K.; Yang, Y.; Zhu, H.; Wang, M. Collision-free and kinematically feasible path planning along a reference path for autonomous vehicle. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 907–912. [Google Scholar]
- Yu, L.; Kong, D.; Shao, X.; Yan, X. A Path Planning and Navigation Control System Design for Driverless Electric Bus. IEEE Access 2018, 6, 53960–53975. [Google Scholar] [CrossRef]
- Galceran, E.; Eustice, R.M.; Olson, E. Toward integrated motion planning and control using potential fields and torque-based steering actuation for autonomous driving. In Proceedings of the Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 304–309. [Google Scholar]
- Huang, Y.; Ding, H.; Zhang, Y.; Wang, H.; Cao, D.; Xu, N.; Hu, C. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach. IEEE Trans. Ind. Electron. 2019, 67, 1376–1386. [Google Scholar] [CrossRef]
- Snapper, E. Model-Based Path Planning and Control for Autonomous Vehicles Using Artificial Potential Fields. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Receveur, J.B.; Victor, S.; Melchior, P. Autonomous car decision making and trajectory tracking based on genetic algorithms and fractional potential fields. Intell. Serv. Robot. 2020, 13, 315–330. [Google Scholar] [CrossRef]
- Schöner, G.; Dose, M. A dynamical systems approach to task-level system integration used to plan and control autonomous vehicle motion. Robot. Auton. Syst. 1992, 10, 253–267. [Google Scholar] [CrossRef]
- Bicho, E. Dynamic Approach to Behavior-Based Robotics: Design, Specification, Analysis, Simulation and Implementation. Ph.D. Thesis, Universidade do Minho, Braga, Portugal, 2000. [Google Scholar]
- Bicho, E.; Monteiro, S. Formation control for multiple mobile robots: A non-linear attractor dynamics approach. In Proceedings of the International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 8–13 October 2003; Volume 2, pp. 2016–2022. [Google Scholar]
- Machado, T.; Malheiro, T.; Monteiro, S.; Erlhagen, W.; Bicho, E. Attractor dynamics approach to joint transportation by autonomous robots: Theory, implementation and validation on the factory floor. Auton. Robots 2018, 43, 1–22. [Google Scholar] [CrossRef]
- Althaus, P.; Ishiguro, H.; Kanda, T.; Miyashita, T.; Christensen, H.I. Navigation for human-robot interaction tasks. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 2, pp. 1894–1900. [Google Scholar]
- Hernandes, A.C.; Guerrero, H.B.; Becker, M.; Jokeit, J.S.; Schöner, G. A comparison between reactive potential fields and Attractor Dynamics. In Proceedings of the IEEE 5th Colombian Workshop on Circuits and Systems (CWCAS), Bogota, Colombia, 16–17 October 2014. [Google Scholar]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Abraham, N.; Ghosh, B.; Simms, C.; Thomson, R.; Amato, G. Assessment of the impact speed and angle conditions for the EN1317 barrier tests. Int. J. Crashworthiness 2016, 21, 211–221. [Google Scholar] [CrossRef] [Green Version]
- Althoff, M.; Koschi, M.; Manzinger, S. CommonRoad: Composable benchmarks for motion planning on roads. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 719–726. [Google Scholar]
- Bae, I.; Moon, J.; Seo, J. Toward a Comfortable Driving Experience for a Self-Driving Shuttle Bus. Electronics 2019, 8, 943. [Google Scholar] [CrossRef] [Green Version]
- Fancher, P.; Bareket, Z. Evaluating headway control using range versus range-rate relationships. Veh. Syst. Dyn. 1994, 23, 575–596. [Google Scholar] [CrossRef]
- Wang, H.; Li, G.; Hou, J.; Chen, L.; Hu, N. A Path Planning Method for Underground Intelligent Vehicles Based on an Improved RRT* Algorithm. Electronics 2022, 11, 294. [Google Scholar] [CrossRef]
- Li, H.; Liu, W.; Yang, C.; Wang, W.; Qie, T.; Xiang, C. An Optimization-based Path Planning Approach for Autonomous Vehicles using dynEFWA-Artificial Potential Field. IEEE Trans. Intell. Veh. 2021. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An open urban driving simulator. In Proceedings of the Conference on Robot Learning, Mountain View, CA, USA, 13–15 November 2017; pp. 1–16. [Google Scholar]
- Liu, S.; Tang, J.; Zhang, Z.; Gaudiot, J.L. Computer architectures for autonomous driving. Computer 2017, 50, 18–25. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Name | Units | Symbol | Name | Units |
|---|---|---|---|---|---|
| x position in the XY frame | m | y position in the XY frame | m | ||
| Stering angle | rad | Rate of change of stering angle | rad/s | ||
| Velocity | m/s | Yaw angle | rad | ||
| Rate of change of yaw angle | rad/s | Yaw angle acceleration | |||
| Side slip angle | rad | Longitudinal acceleration | |||
| Lateral acceleration | g | Gravitational acceleration | |||
| Friction coefficient | - | m | Mass | kg | |
| Distance of the front tire to C.G. | m | Distance of the rear tire to C.G. | m | ||
| Inertia moment on the axis | Cornering stiffness coefficient on the front tire | ||||
| Cornering stiffness coefficient on the rear tire | Distance of C.G. to ground plane | m |
| Reference | Algorithm | Complexity | Marks |
|---|---|---|---|
| [54] | Improved RRT * | a: Samples | |
| b: Nodes | |||
| [55] | DynEFWA-APF | a: Obstacles | |
| b: Road marks | |||
| c: Fireworks | |||
| d: Iterations | |||
| [40] | APF-ERN | a: Edges | |
| b: Nodes | |||
| Our approach | VADA | n: Collision obstacles | |
| m: Surrounded obstacles |
| Algorithm | Avoidance of Dynamic Obstacles | Reference Path Requierement | Require Smoothing Post-Process | Type of Trajectory |
|---|---|---|---|---|
| Improved RRT * | No information | Vectorized map | No | Discrete |
| DynEFWA-APF | ✔ | Continuous curvature | No | Discrete |
| APF-ERN | ✔ | Continuous curvature | Yes | Discrete |
| VADA | ✔ | Continuous curvature | No | Discrete |
| Algorithm | Support technique | Real time | Driving scenario | Reference |
| Improved RRT * | - | ✔ | Production | [54] |
| DynEFWA-APF | Meta-heuristic optimization | ✔ | Highway | [55] |
| APF-ERN | Space configuration | ✔ | Highway | [40] |
| VADA | Aceleration rules | ✔ | Highway/Urban | This paper |
| Dynamic Model | Constraints | VADA/Control | |||
|---|---|---|---|---|---|
| Symbol | Value | Symbol | Range/Value | Symbol | Range/Value |
| m | 1400 | ||||
| 3.5 | 0.4 | ||||
| 0.711 | 0.5 | ||||
| 1.711 | 3 | ||||
| 20.89 | 1 | ||||
| 20.89 | 1.4 | 0 | |||
| 0.25 | f | 1 | 0.1 | ||
| g | 9.81 | c | 0 | 10/12 | |
| 1538 | r | −1 | |||
| 0.1 | 5.6 | ||||
| 2 | 5 | ||||
| CS1—Figure 7 | CS2—Figure 9A,B | CS3—Figure 10A | |||
|---|---|---|---|---|---|
| Reference | Path Smoothness (m) | Reference | Path Smoothness (m) | Reference | Path Smoothness (m) |
| t = 0.4 (s) | 2.50 × | Red path | 0.0643, 0.1495 | Red path | 0.002 |
| t = 5.1 (s) | 0.3264 | Blue path | 0.1609, 0.1227 | Blue path | 0.1469 |
| t = 9.8 (s) | 0.3891 | Magenta path | 0.1399 | ||
| t = 14.5 (s) | 0.4327 | ||||
| t = 19.2 (s) | 0.3053 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bautista-Camino, P.; Barranco-Gutiérrez, A.I.; Cervantes, I.; Rodríguez-Licea, M.; Prado-Olivarez, J.; Pérez-Pinal, F.J. Local Path Planning for Autonomous Vehicles Based on the Natural Behavior of the Biological Action-Perception Motion. Energies 2022, 15, 1769. https://doi.org/10.3390/en15051769
Bautista-Camino P, Barranco-Gutiérrez AI, Cervantes I, Rodríguez-Licea M, Prado-Olivarez J, Pérez-Pinal FJ. Local Path Planning for Autonomous Vehicles Based on the Natural Behavior of the Biological Action-Perception Motion. Energies. 2022; 15(5):1769. https://doi.org/10.3390/en15051769
Chicago/Turabian StyleBautista-Camino, Pedro, Alejandro I. Barranco-Gutiérrez, Ilse Cervantes, Martin Rodríguez-Licea, Juan Prado-Olivarez, and Francisco J. Pérez-Pinal. 2022. "Local Path Planning for Autonomous Vehicles Based on the Natural Behavior of the Biological Action-Perception Motion" Energies 15, no. 5: 1769. https://doi.org/10.3390/en15051769
APA StyleBautista-Camino, P., Barranco-Gutiérrez, A. I., Cervantes, I., Rodríguez-Licea, M., Prado-Olivarez, J., & Pérez-Pinal, F. J. (2022). Local Path Planning for Autonomous Vehicles Based on the Natural Behavior of the Biological Action-Perception Motion. Energies, 15(5), 1769. https://doi.org/10.3390/en15051769