Figure 1.
Structure of the MLRW.
Figure 1.
Structure of the MLRW.
Figure 2.
Force analysis and coordinate system of the MLRW.
Figure 2.
Force analysis and coordinate system of the MLRW.
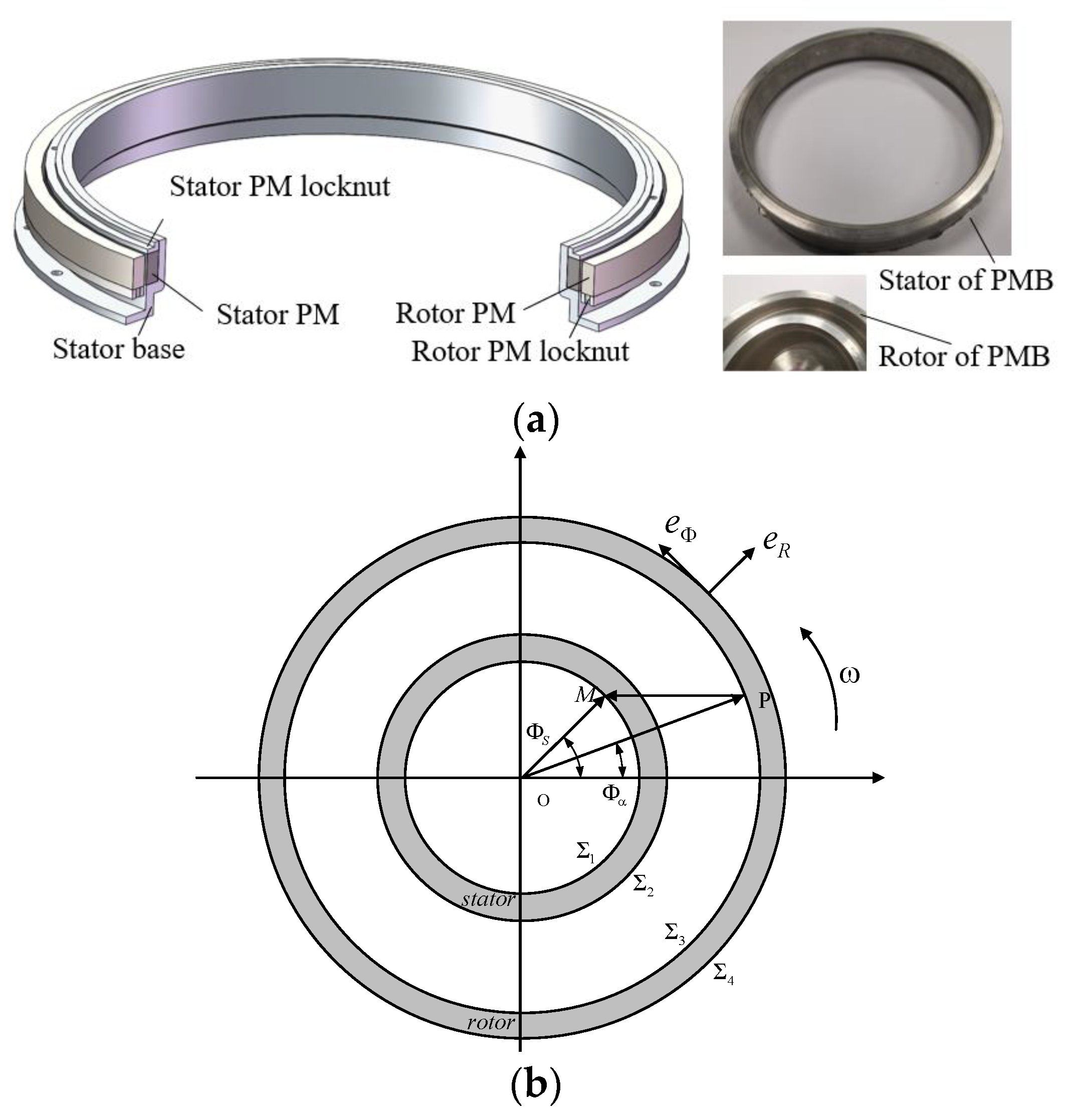
Figure 3.
PMB scheme. (a) The structure of the PMB. (b) Bearing configuration schematic.
Figure 3.
PMB scheme. (a) The structure of the PMB. (b) Bearing configuration schematic.
Figure 4.
Axial magnetization of the PM in the PMB.
Figure 4.
Axial magnetization of the PM in the PMB.
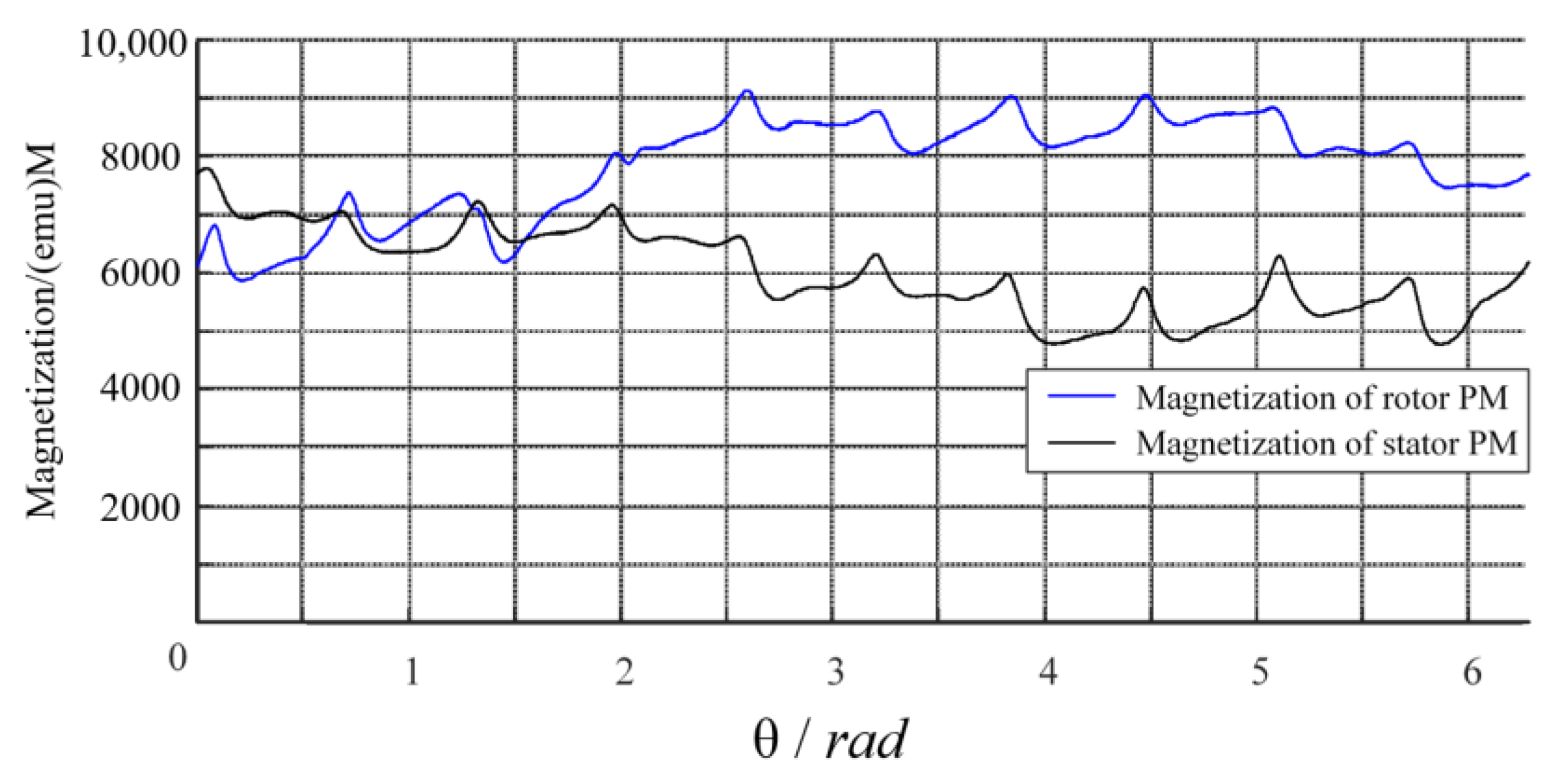
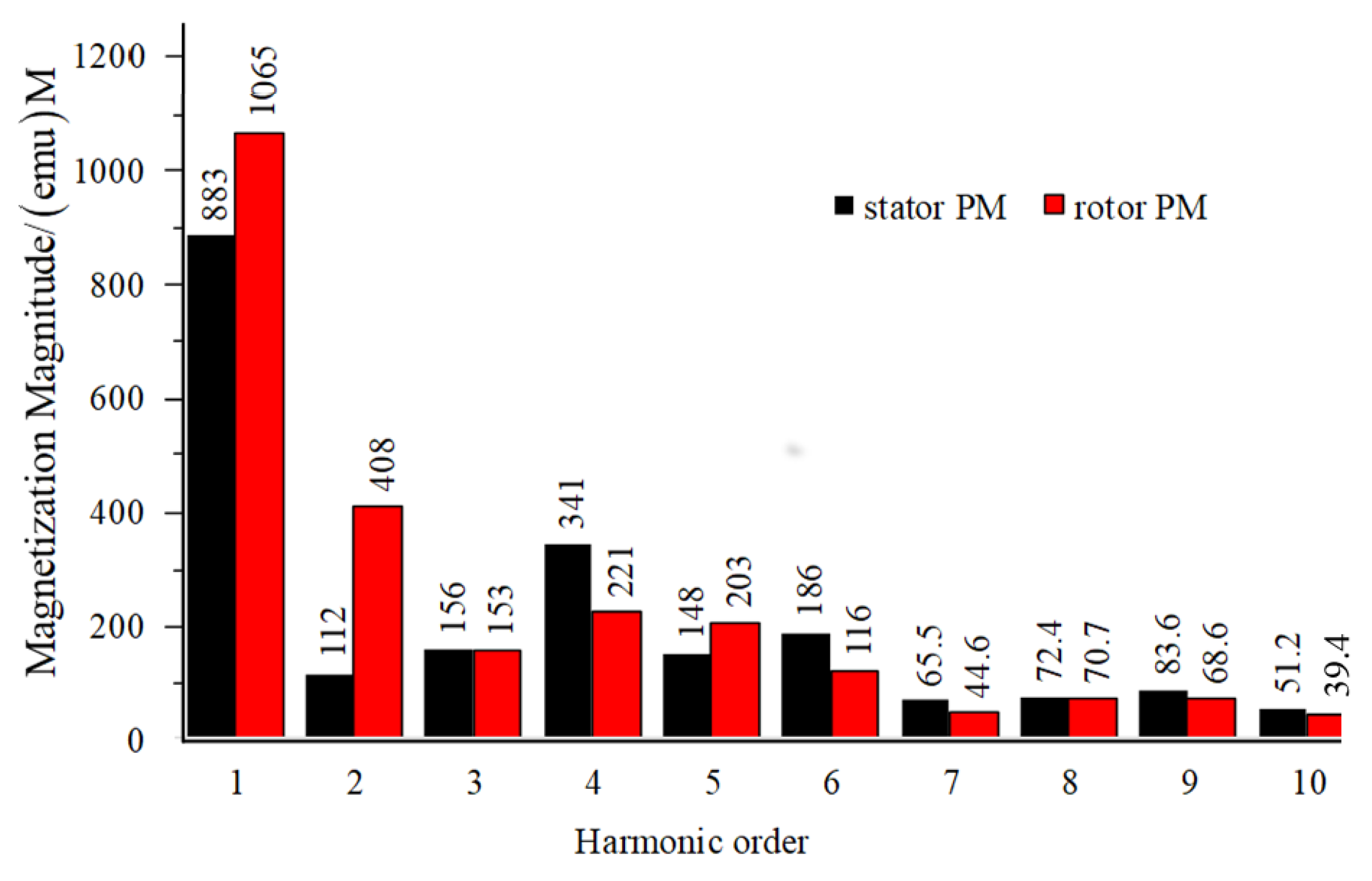
Figure 5.
The magnetization magnitude of the harmonic of the PMB.
Figure 5.
The magnetization magnitude of the harmonic of the PMB.
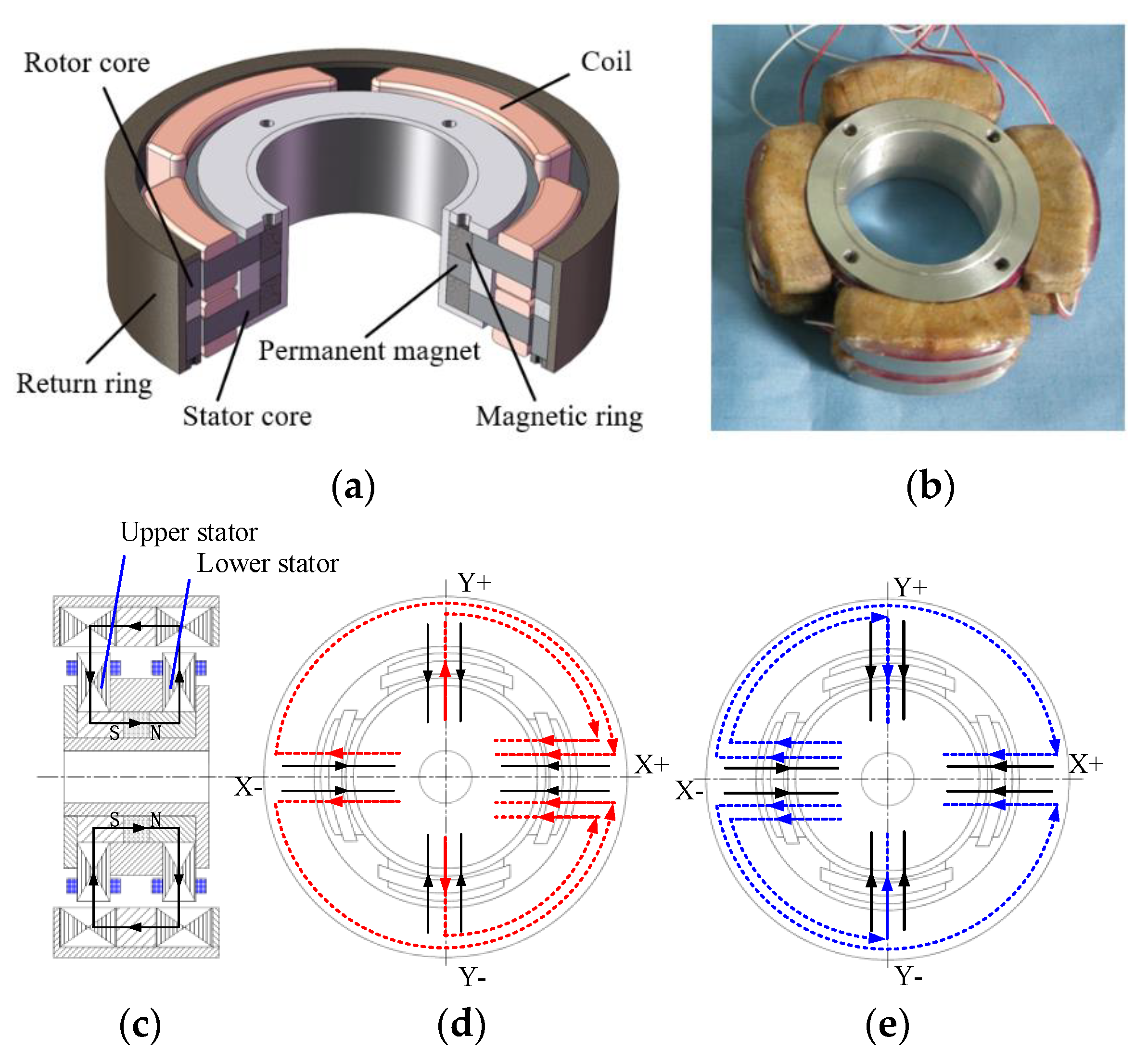
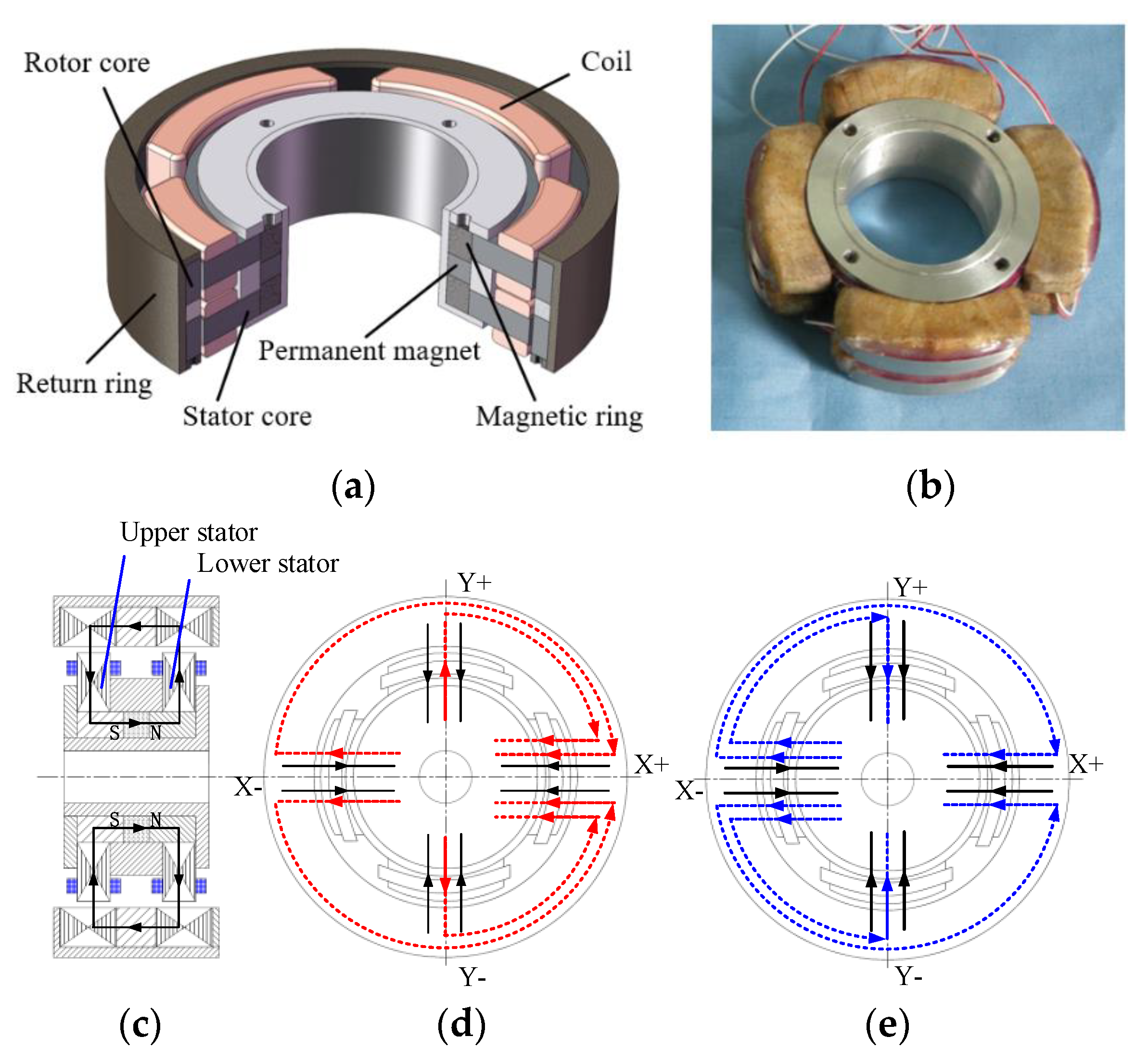
Figure 6.
Structure of the AMB. (a) Scheme of the AMB structure. (b) The stator of the AMB. (c) Scheme of the PM magnetic circuit. (d) Scheme of the magnetic circuit of X+ winding with positive excitation current (upper stator). (e) Scheme of the magnetic circuit of X− winding with positive excitation current (upper stator).
Figure 6.
Structure of the AMB. (a) Scheme of the AMB structure. (b) The stator of the AMB. (c) Scheme of the PM magnetic circuit. (d) Scheme of the magnetic circuit of X+ winding with positive excitation current (upper stator). (e) Scheme of the magnetic circuit of X− winding with positive excitation current (upper stator).
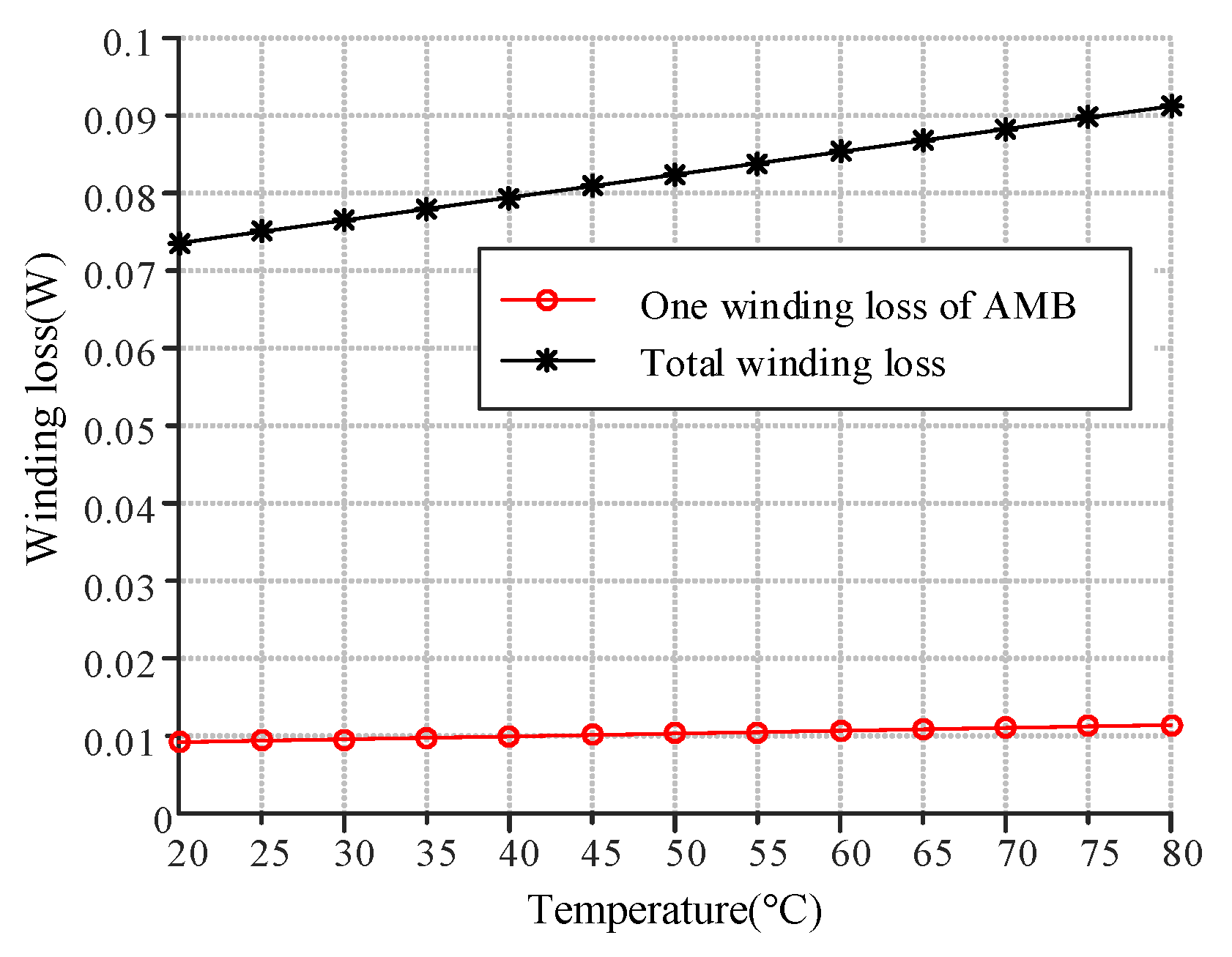
Figure 7.
Winding loss versus temperature for the AMB.
Figure 7.
Winding loss versus temperature for the AMB.
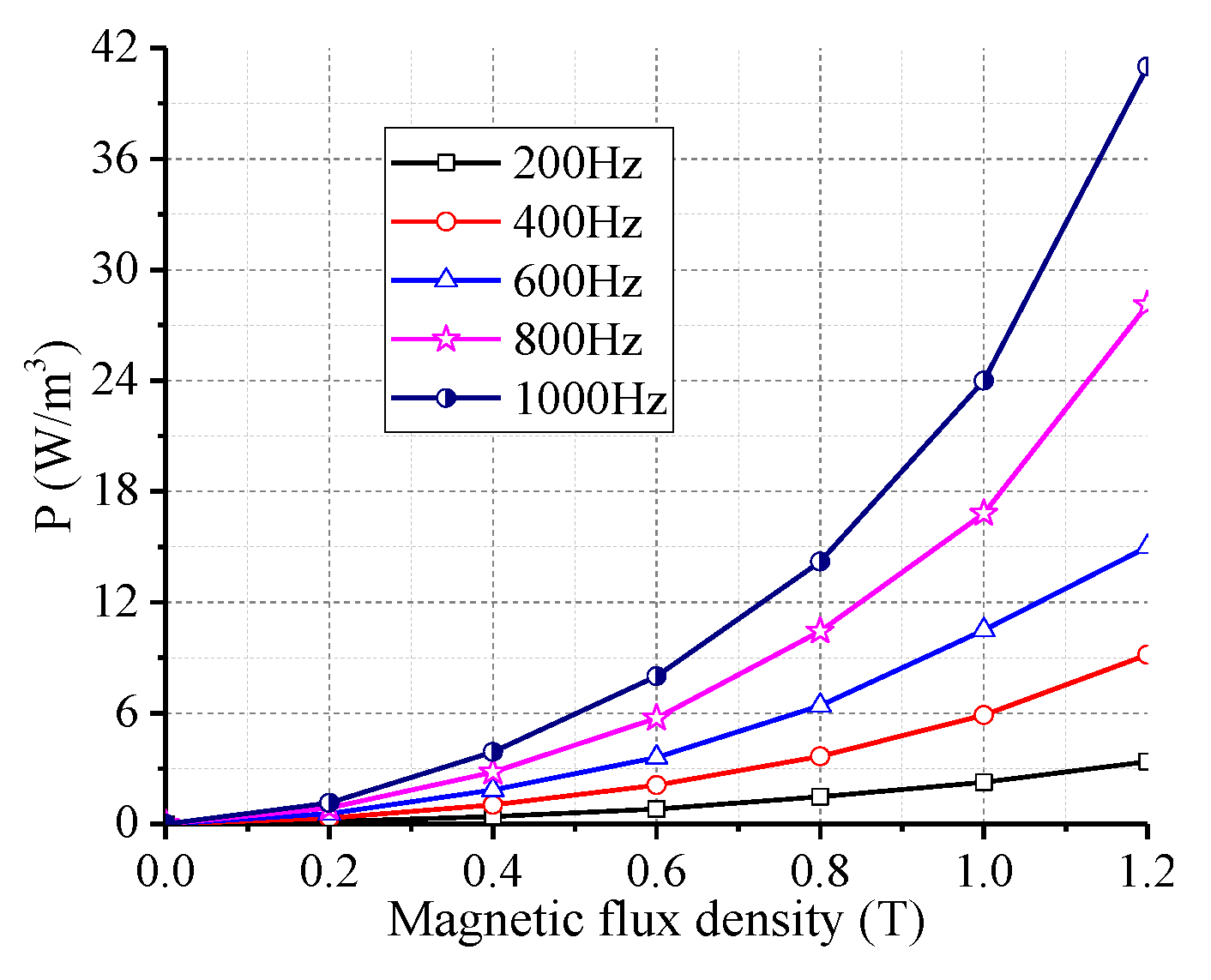
Figure 8.
Loss curves of the silicon sheet with a sinusoid supply.
Figure 8.
Loss curves of the silicon sheet with a sinusoid supply.
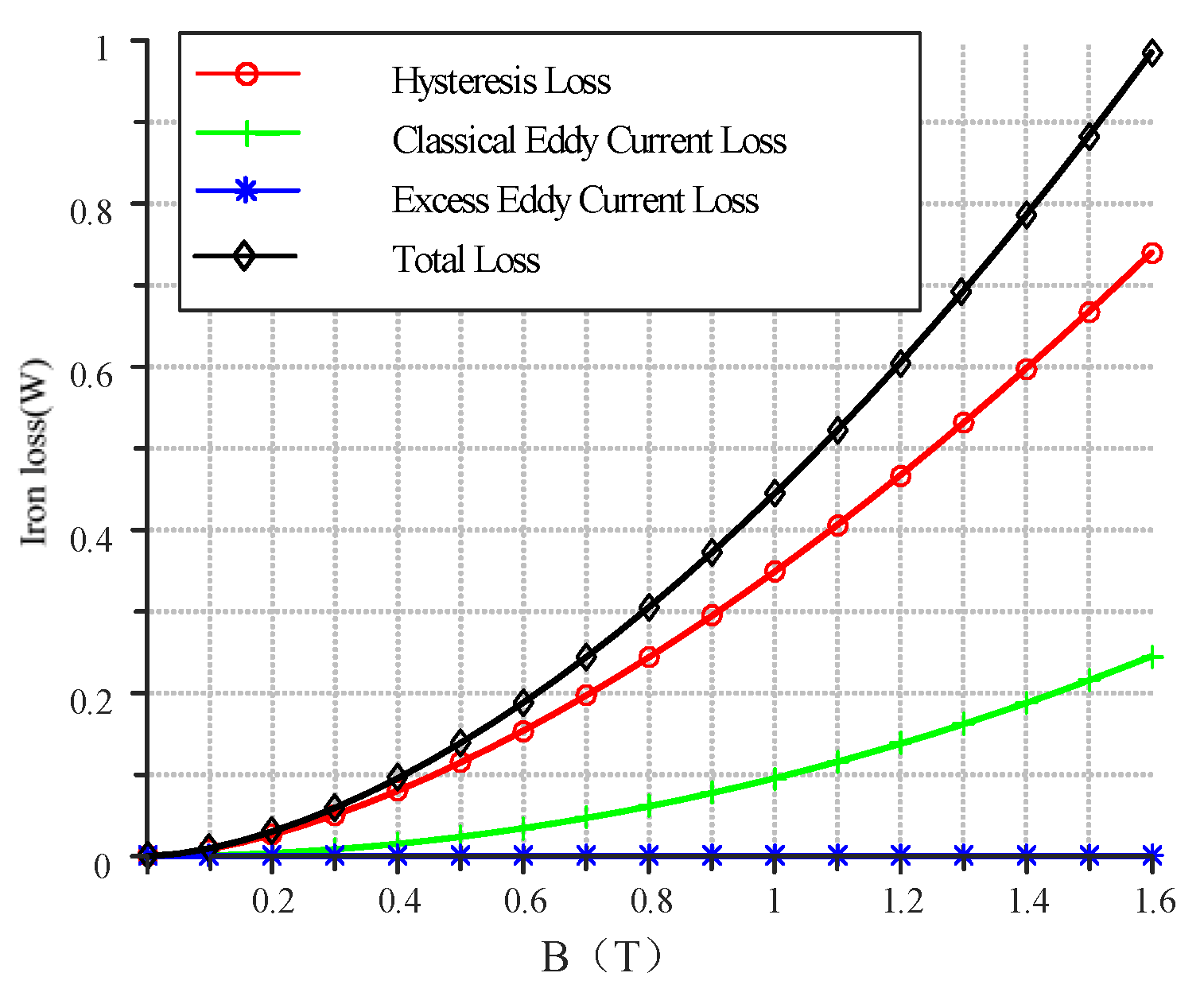
Figure 9.
Hysteresis loss curve, classical eddy current loss curve, and excess eddy current loss curve in the AMB versus magnetic magnitude.
Figure 9.
Hysteresis loss curve, classical eddy current loss curve, and excess eddy current loss curve in the AMB versus magnetic magnitude.
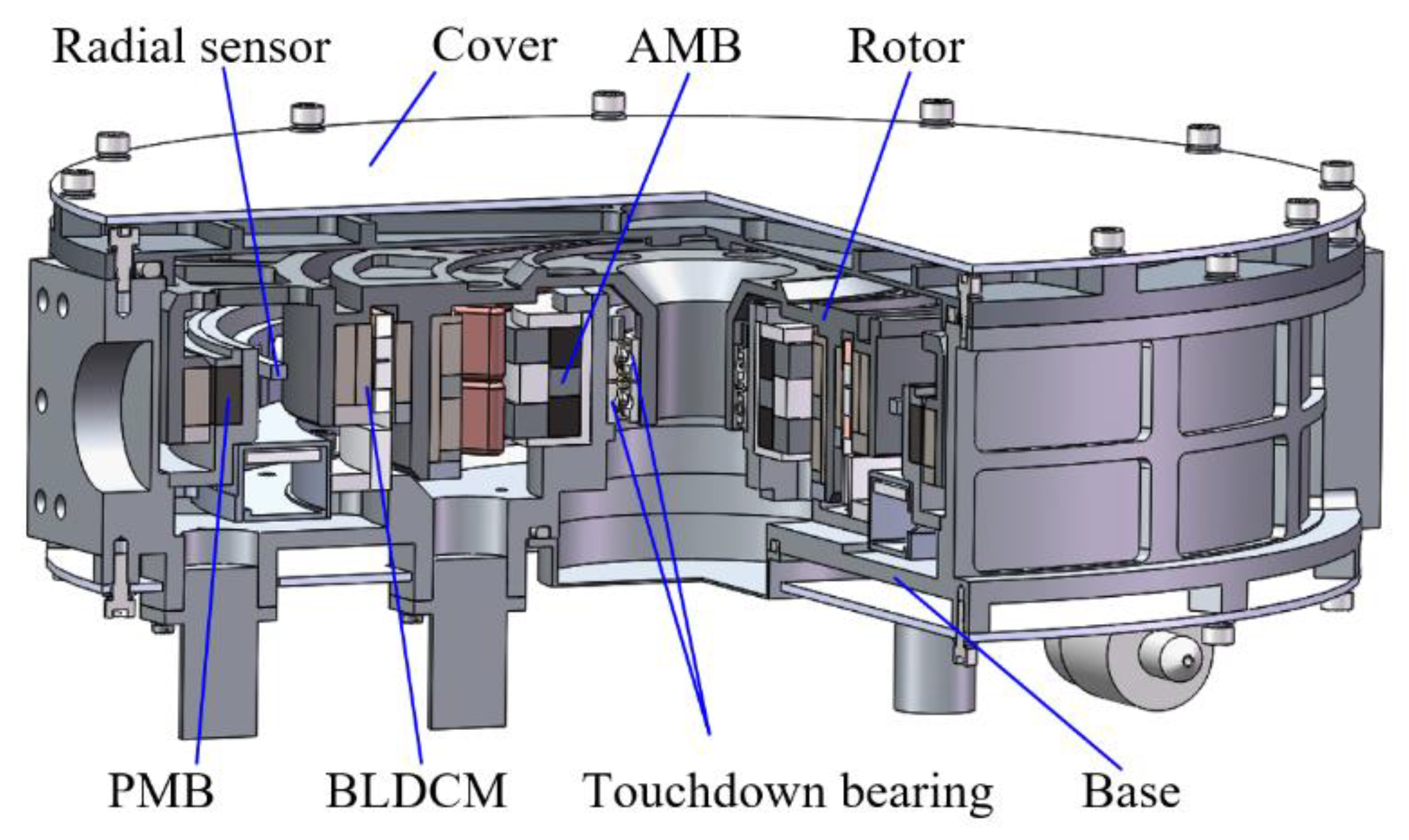
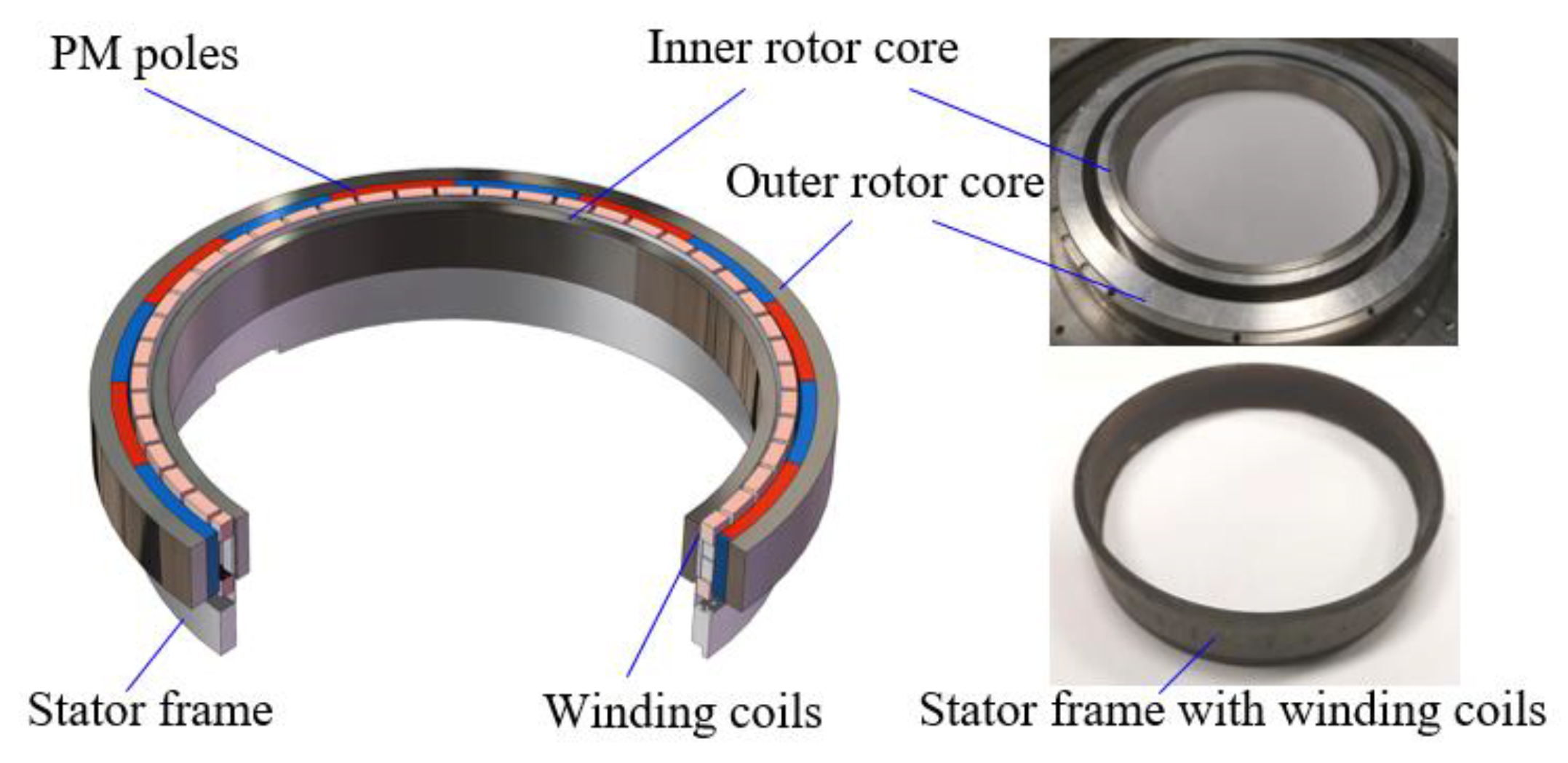
Figure 10.
Structure of the BLDCM.
Figure 10.
Structure of the BLDCM.
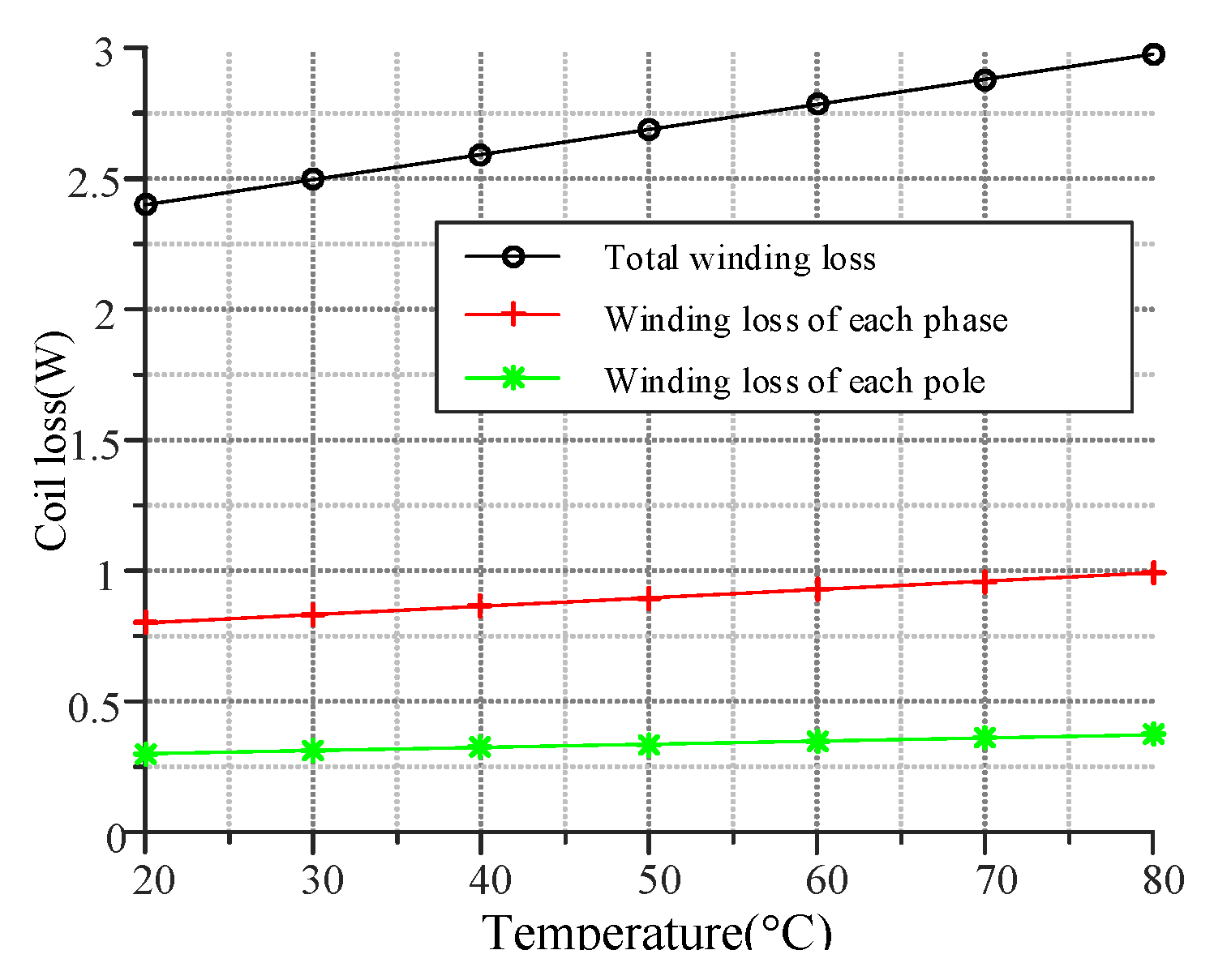
Figure 11.
Winding loss of the BLDCM affected by temperature.
Figure 11.
Winding loss of the BLDCM affected by temperature.
Figure 12.
The maximum and minimum FFT values of the harmonics in the inner rotor core.
Figure 12.
The maximum and minimum FFT values of the harmonics in the inner rotor core.
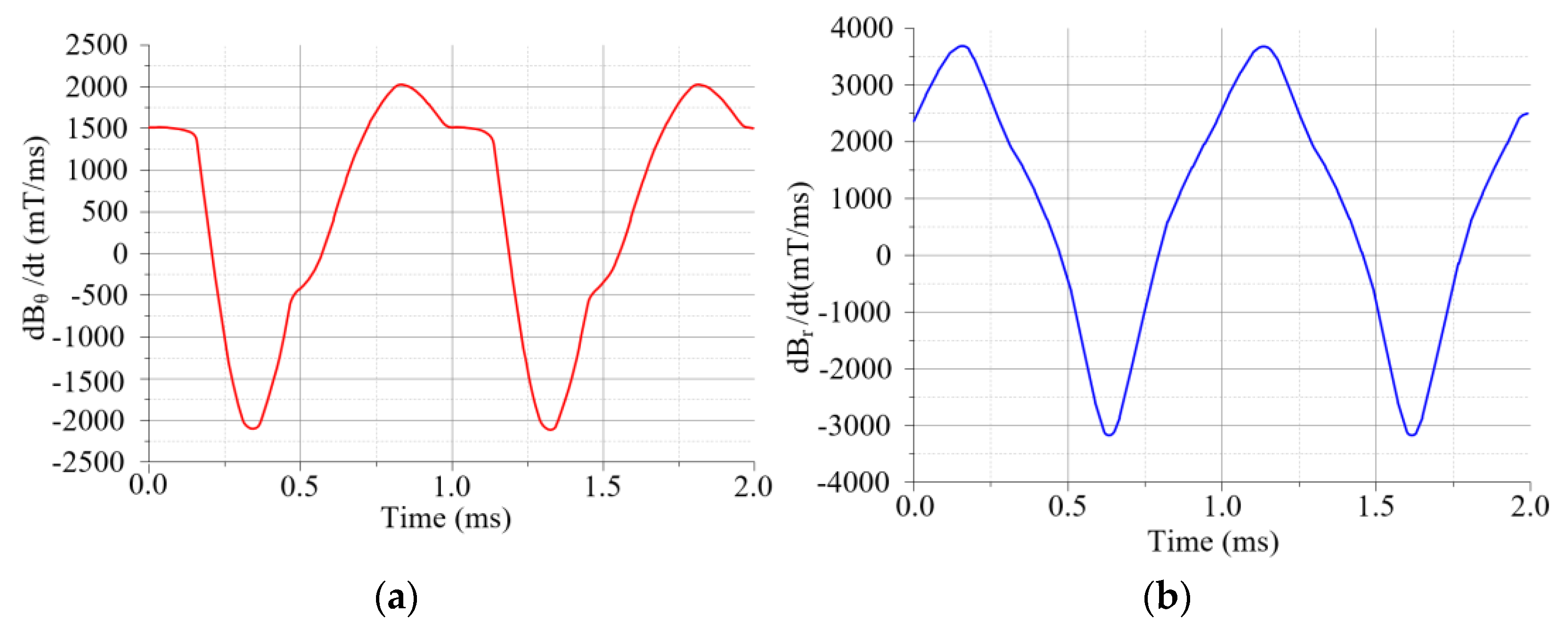
Figure 13.
The first derivative of the radial and axial flux density in the inner rotor core. (a) Radial. (b) Axial.
Figure 13.
The first derivative of the radial and axial flux density in the inner rotor core. (a) Radial. (b) Axial.
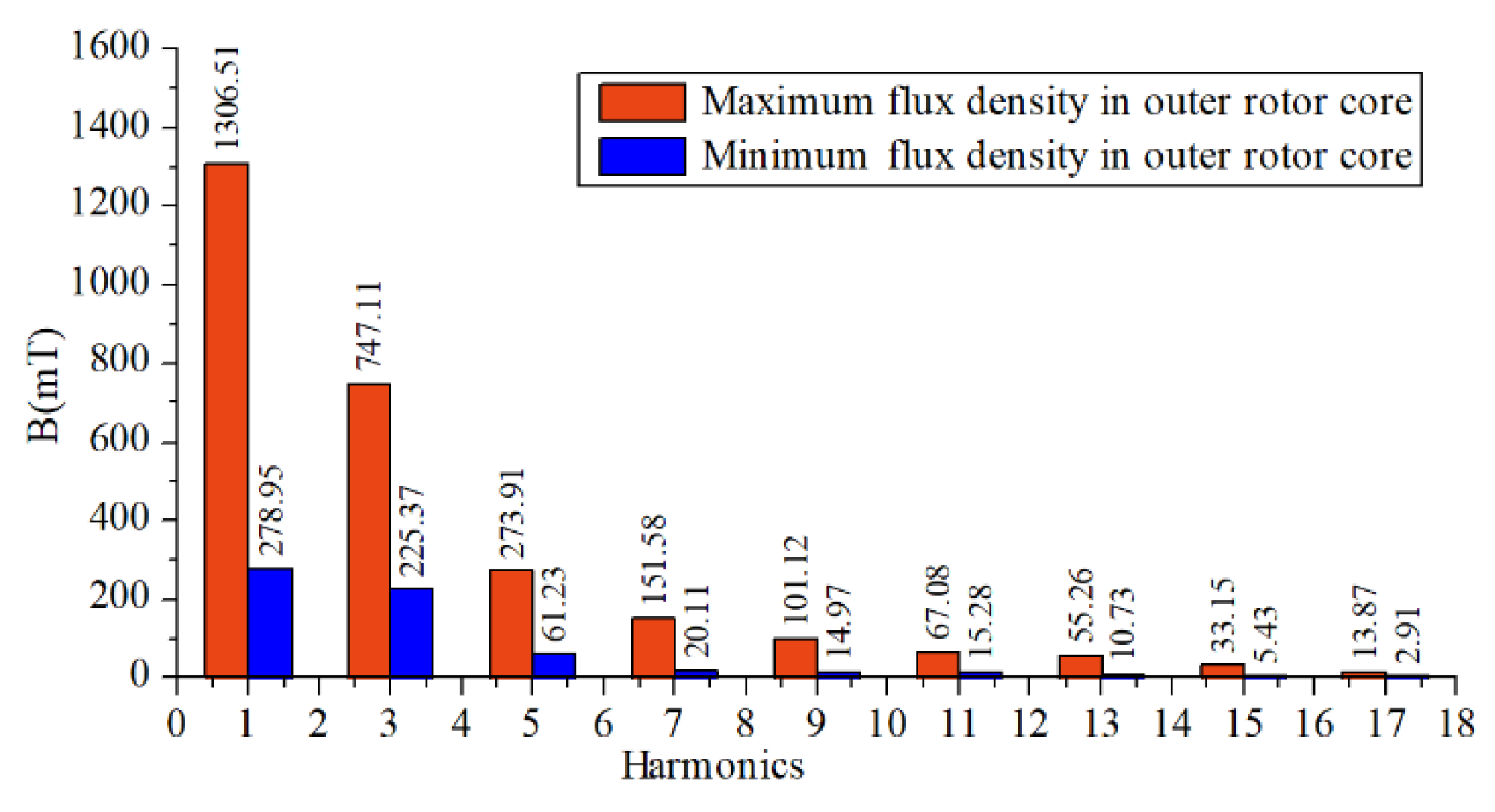
Figure 14.
The maximum and minimum FFT values of the harmonics in the outer rotor core.
Figure 14.
The maximum and minimum FFT values of the harmonics in the outer rotor core.
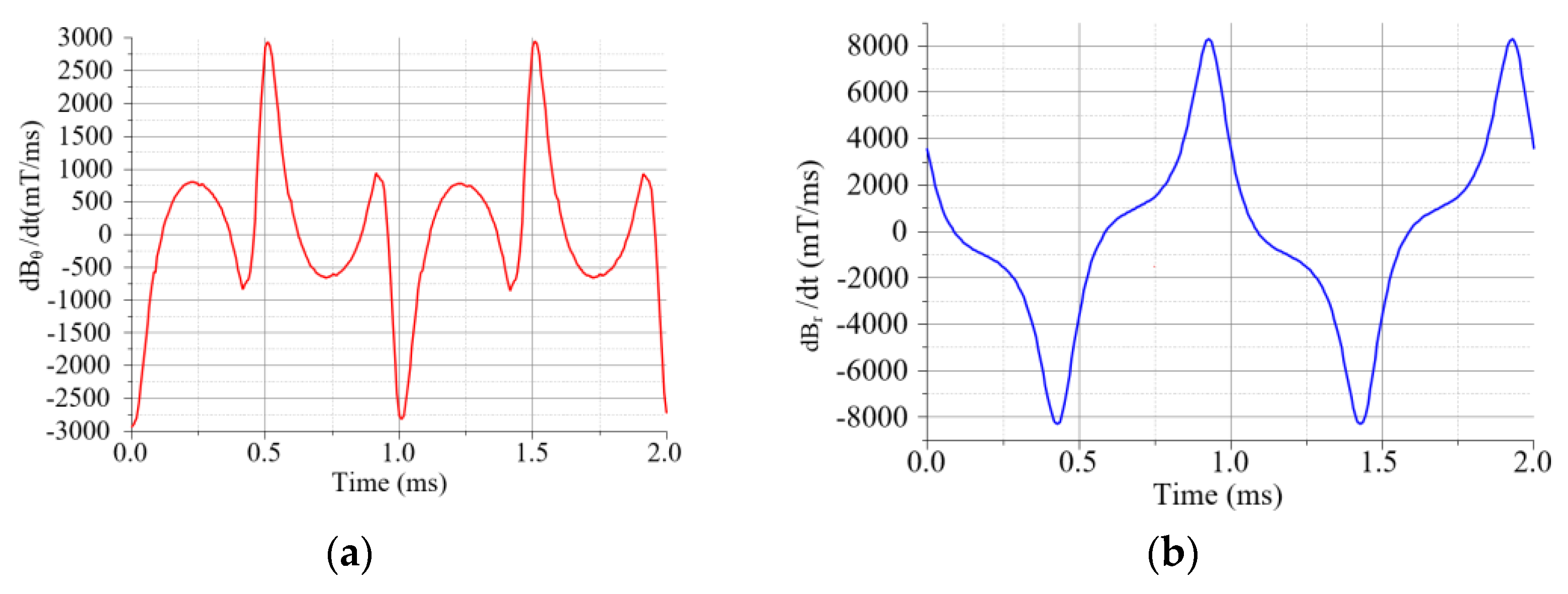
Figure 15.
The first derivative of the radial and axial flux density in the outer rotor core. (a) Radial. (b) Axial.
Figure 15.
The first derivative of the radial and axial flux density in the outer rotor core. (a) Radial. (b) Axial.
Figure 16.
The harmonic amplitude in the PM of the BLDCM.
Figure 16.
The harmonic amplitude in the PM of the BLDCM.
Figure 17.
Finite element analysis of the MLRW. (a) 3-D finite element mesh of the MLRW. (b) The predicted thermal field of the MLRW by FEM.
Figure 17.
Finite element analysis of the MLRW. (a) 3-D finite element mesh of the MLRW. (b) The predicted thermal field of the MLRW by FEM.
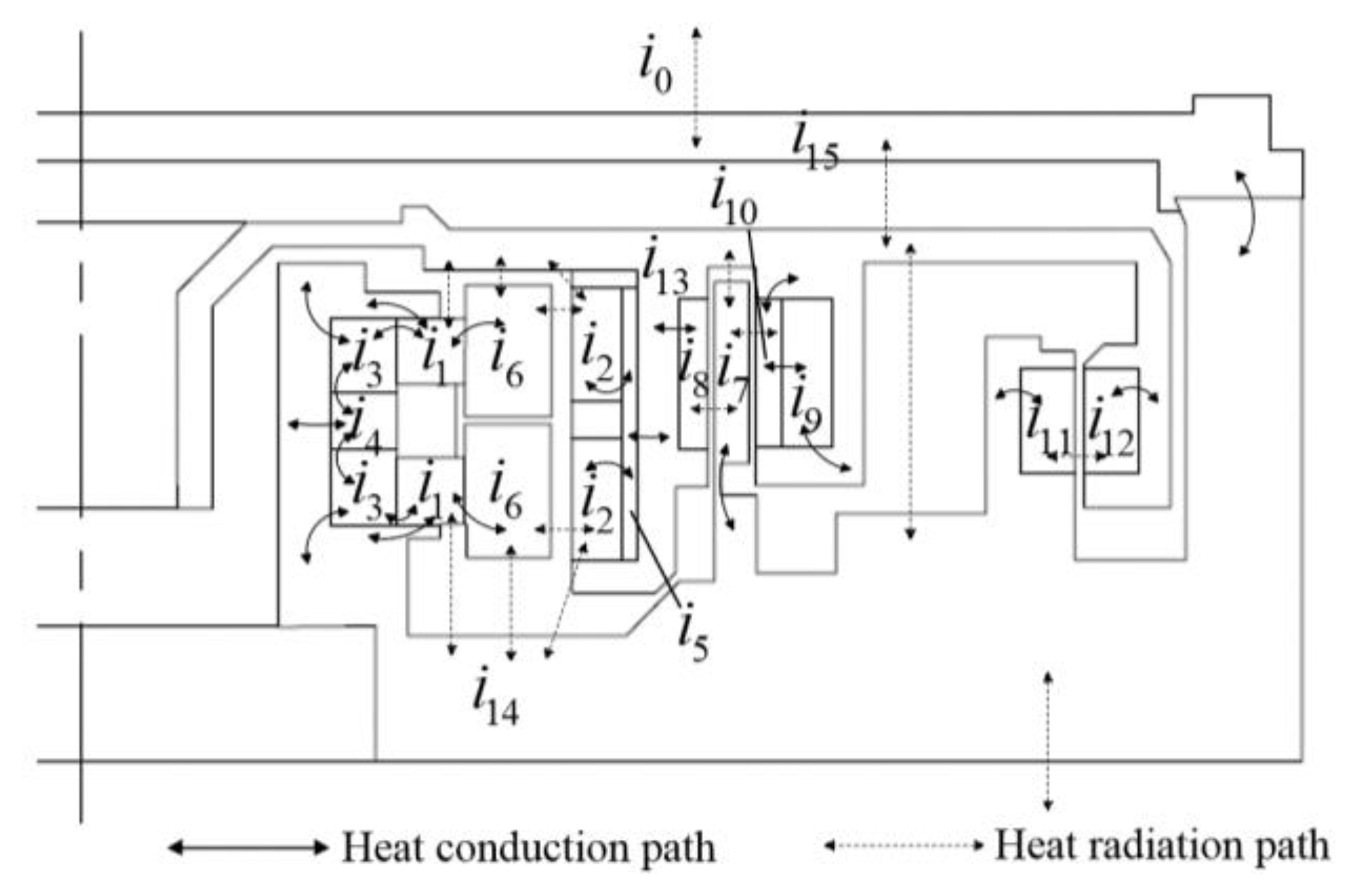
Figure 18.
Equivalent node unit and heat dissipation path of MLRW.
Figure 18.
Equivalent node unit and heat dissipation path of MLRW.
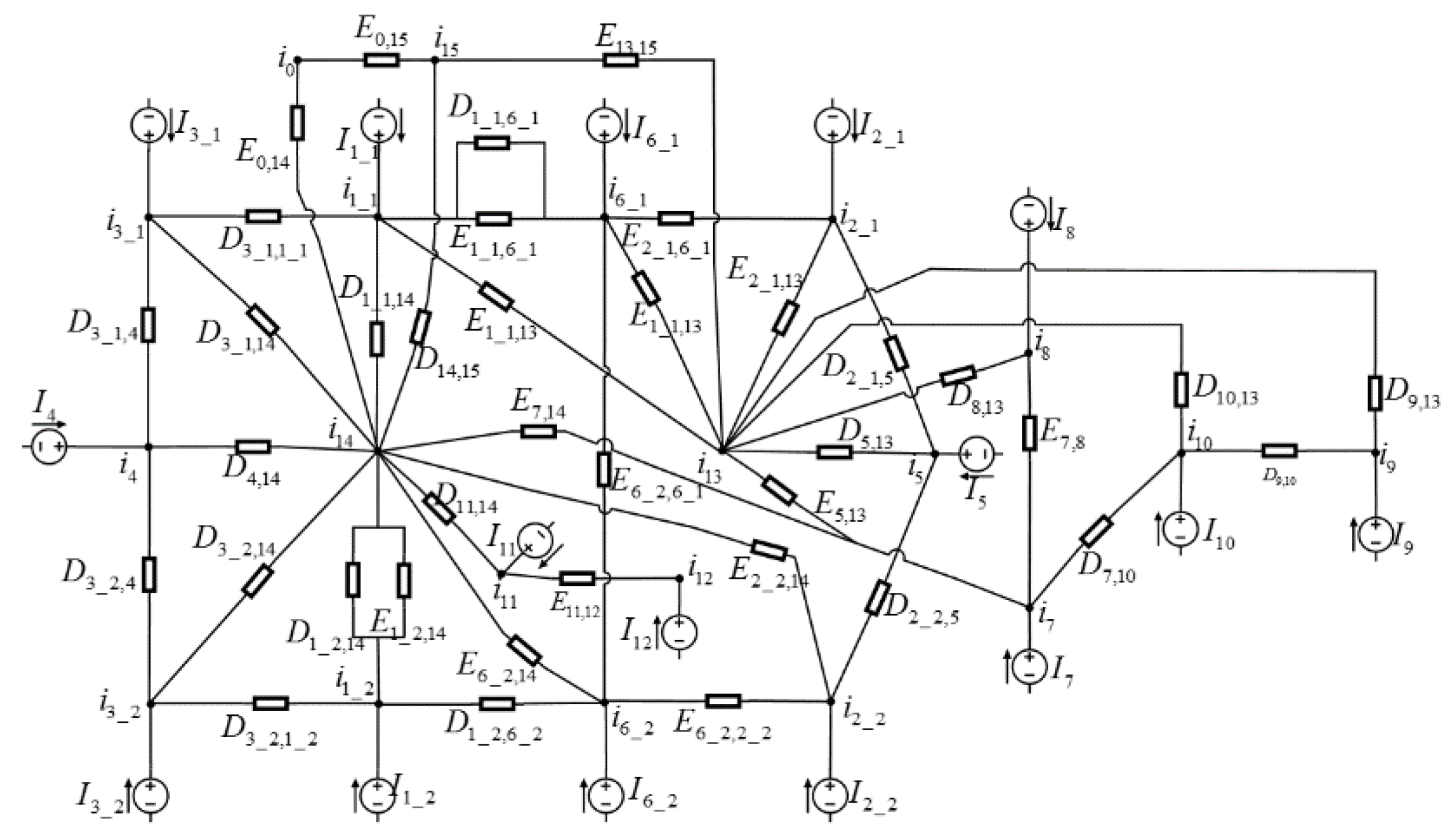
Figure 19.
Equivalent thermal network model of the MLRW.
Figure 19.
Equivalent thermal network model of the MLRW.
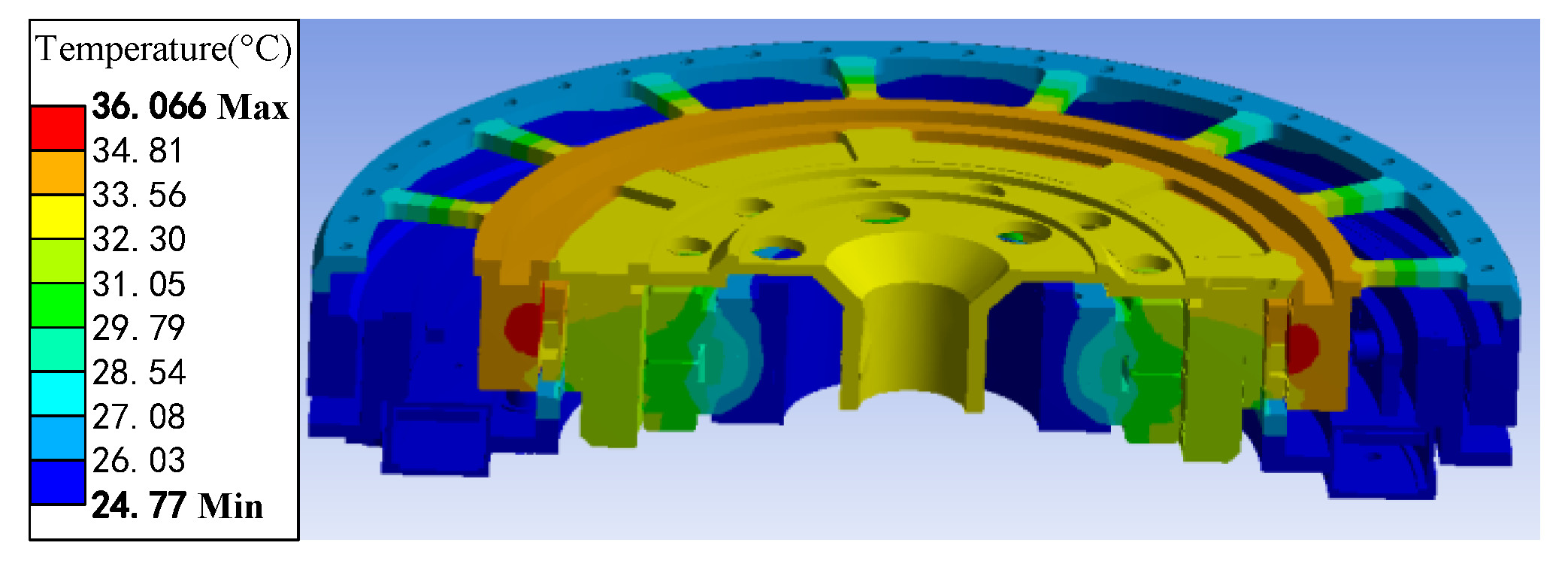
Figure 20.
Optimized thermal field of MLRW by FEM.
Figure 20.
Optimized thermal field of MLRW by FEM.
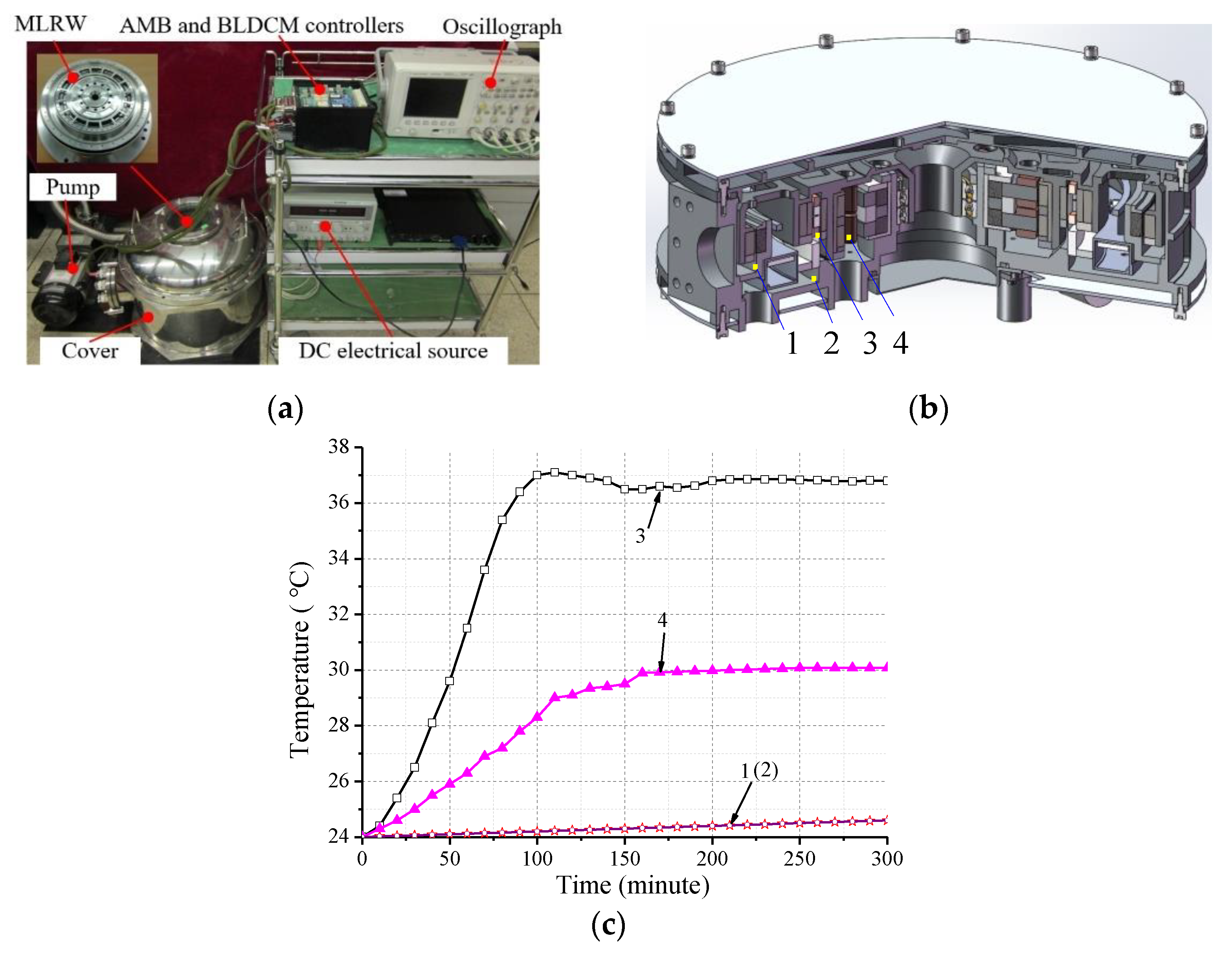
Figure 21.
The testing setup of the MLRW prototype. (a) Testing setup. (b) Positions of the four thermistors. (c) Measurement data.
Figure 21.
The testing setup of the MLRW prototype. (a) Testing setup. (b) Positions of the four thermistors. (c) Measurement data.
Table 1.
Design parameters of the PMB.
Table 1.
Design parameters of the PMB.
| Parameters and Characteristics | Design Value of PMB |
|---|
| PMB mass, kg | 2.68 |
| Nominal air gap, mm | 1.0 |
| Outer diameter of the stator, mm | 92.5 |
| Inner diameter of the stator, mm | 87.5 |
| Outer diameter of the rotor, mm | 98.5 |
| Inner diameter of the rotor, mm | 93.5 |
| Bearing length, mm | 10.0 |
Table 2.
Design parameters of the AMB.
Table 2.
Design parameters of the AMB.
| Parameters and Characteristics | Design Value of PMB |
|---|
| AMB mass, kg | 1.15 |
| Nominal air gap, mm | 0.80 |
| Maximum current in each coil, A | 1.13 |
| Number of winding turns | 150 |
| Outer diameter of the stator, mm | 90.4 |
| Inner diameter of the stator, mm | 34.0 |
| Bearing length, mm | 25.6 |
| Maximum force per direction, N | 408.8 |
| Current stiffness in center position, N/A | 393.4 |
| Position stiffness in center position, N/μm | 4.18 |
Table 3.
Copper loss calculation for the AMB (20 °C).
Table 3.
Copper loss calculation for the AMB (20 °C).
| Coils | Measured Current | Resistance | Copper Loss |
|---|
| coil_1~8 | 0.052 A | 3.4 Ω | 0.0092 W |
| Total loss | 0.074 W |
Table 4.
Direct fitting results of parameters for silicon steel sheets.
Table 4.
Direct fitting results of parameters for silicon steel sheets.
| kh | A | kc | ke |
|---|
| 73.0987 | 1.6 | 0.120388 | 1.48188 × 10−3 |
Table 5.
Main parameters and loss calculation results of the AMB.
Table 5.
Main parameters and loss calculation results of the AMB.
| Iron Core | fR (Hz) | BR (T) | VR (mm3) | Iron Loss (W) |
|---|
| Stator core | 166.7 | 1.4 | 17,780 | 0.488 |
| Rotor core | 10,857 | 0.298 |
| Total loss | 0.786 |
Table 6.
Percentage of different iron loss types.
Table 6.
Percentage of different iron loss types.
| Iron Core | fR (Hz) | BR (T) | VR (mm3) | Iron Loss (W) |
|---|
| Value | 0.598 W | 0.187 W | 1.12 × 10−3 W | 0.816 W |
| Percentage | 76.08% | 23.79% | 0.13% | 1 |
Table 7.
Other parameters and loss calculation results of the AMB.
Table 7.
Other parameters and loss calculation results of the AMB.
| Parts | Frequency | Volume | Conductivity | Max Flux Density | Iron Loss |
|---|
| Magnet ring | 166.7 Hz | 6993 mm3 | 2.5 × 106 S/m | 0.85 T | 0.159 W |
| PM | 166.7 Hz | 4995 mm3 | 1.1 × 106 S/m | 0.85 T | 0.0256 W |
| Return ring | 166.7 Hz | 18,152 mm3 | 2.5 × 106 S/m | 0.85 T | 0.258 W |
| | Total loss | 0.443 |
Table 8.
Main parameters of the BLDCM.
Table 8.
Main parameters of the BLDCM.
| Parameters | Value |
|---|
| Number of stator slots | 48 |
| Number of pole pairs | 8 |
| Axial length (LPM), mm | 14 |
| Radial thickness of the PM (dPM), mm | 3 |
| Phase resistance (room temperature), Ω | 0.11 |
| Sensor | Hall |
Table 9.
Heat rate of the copper losses in the MLRW.
Table 9.
Heat rate of the copper losses in the MLRW.
| Coils | Copper Loss | Volume | Heat Rate |
|---|
| AMB Coil_1~8 | 0.0092 W | 3461 mm3 | 2601 W/m3 |
| BLDCM Coil_1~48 | 0.0606 W | 794 mm3 | 76,826 W/m3 |
| | Total loss | 2.98 W |
Table 10.
Heat rate of the iron loss in the MLRW.
Table 10.
Heat rate of the iron loss in the MLRW.
| Parts | Iron Loss | Volume | Heat Rate |
|---|
| BLDCM | Outer core | 0.632 W | 30,657 mm3 | 20,615 W/m3 |
| Inner core | 0.474 W | 28,289 mm3 | 16,755 W/m3 |
| PM | 3.42 W | 14,602 mm3 | 234,214 W/m3 |
| AMB | Stator core | 0.488 W | 17,780 mm3 | 27,447 W/m3 |
| Rotor core | 0.298 W | 10,857 mm3 | 27,448 W/m3 |
| Magnetic ring | 0.159 W | 6993.2 mm3 | 22,736 W/m3 |
| Return ring | 0.258 W | 18,152 mm3 | 14,213 W/m3 |
| PM | 0.0256 W | 4995.1 mm3 | 5125 W/m3 |
| PMB | Stator PM | 0.0070 W | 28,274 mm3 | 247.6 W/m3 |
| Rotor PM | 0.0085 W | 30,159 mm3 | 281.8 W/m3 |
Table 11.
Loss percentage of the loss types.
Table 11.
Loss percentage of the loss types.
| Losses | Copper Loss | Iron Loss | Total Loss |
|---|
| Value | 2.98 W | 5.77 W | 8.75 W |
| percentage | 34.1% | 65.9% | 100% |
Table 12.
Loss percentage of the different parts.
Table 12.
Loss percentage of the different parts.
| Losses | BLDCM Loss | AMB Loss | PMB Loss | Total Loss |
|---|
| Value | 7.436 W | 1.303 W | 0.0155 W | 8.75 W |
| percentage | 84.98% | 14.89% | 0.17% | 100% |
Table 13.
Error between calculated and measured temperatures.
Table 13.
Error between calculated and measured temperatures.
| Test Points | Point 1 | Point 2 | Point 3 | Point 4 |
|---|
| Calculated value | 24.8 | 24.8 | 34.8 | 31.1 |
| Measured Value | 24.5 | 24.5 | 36.8 | 30.1 |
| Error | 1.2% | 1.2% | 5.4% | 3.3% |

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}