
Internal Combustion Engine Starting and Torque Boosting Control System Design with Vibration Active Damping Features for a P0 Mild Hybrid Vehicle Configuration




Abstract
1. Introduction
2. Materials and Methods
2.1. P0 Mild Hybrid Architecture
2.1.1. Inherent Benefits of Mild Hybrid System Utilization
- The particular system is relatively simple and cost effective to re-engineer or even retrofit to existing platforms, especially if the belt starter generator (BSG) is fitted into the P0 hybrid vehicle configuration.
- Cost versus benefit ratio is rather good, while still achieving between 12% and 20% emissions’ reduction.
- The technology can be integrated using all MHEV configurations (from P0 to P4).
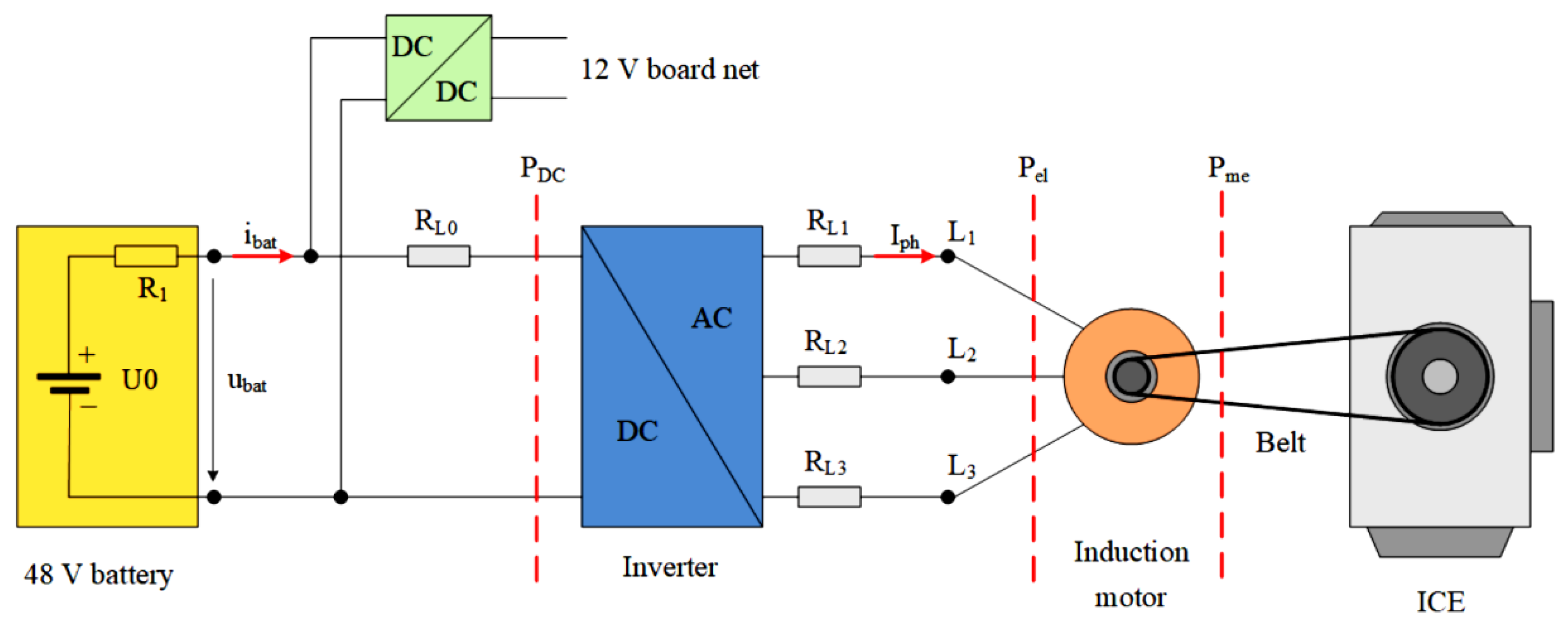
2.1.2. Electrical System Architecture of a 48-V DC Mild Hybrid
2.1.3. Front End Accessory Drive (FEAD)
2.2. FEAD Model
2.2.1. Control-Oriented Model of the Servo-Controlled BSG Electrical Machine
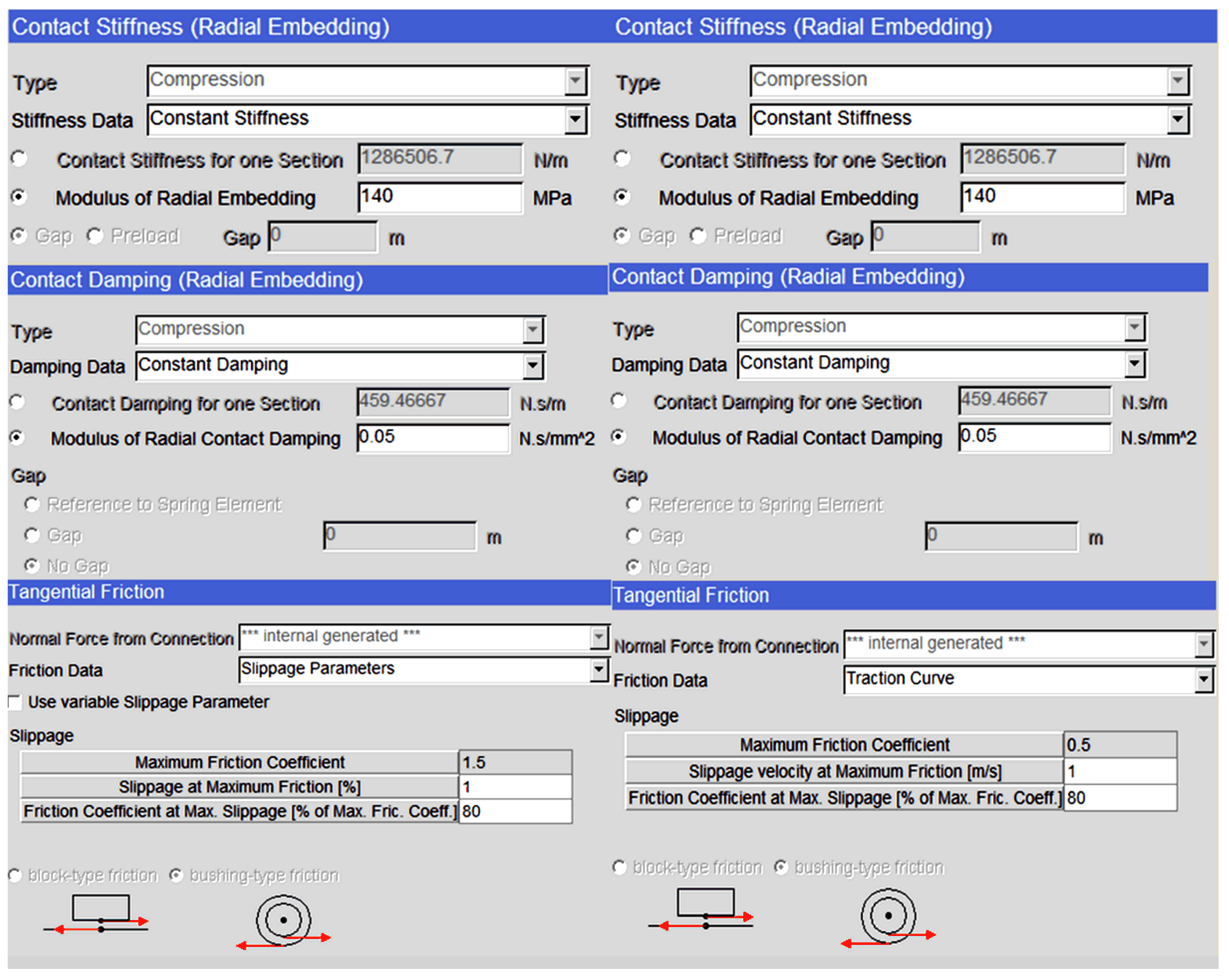
2.2.2. Belt Drive Dynamic Model
2.3. Control System Design
2.3.1. Damping Optimum Criterion
2.3.2. BSG Electrical Machine Speed Control System
2.3.3. Active Damping PI Speed Controller Tuning
3. Simulation Results
3.1. MATLAB/Simulink Environment
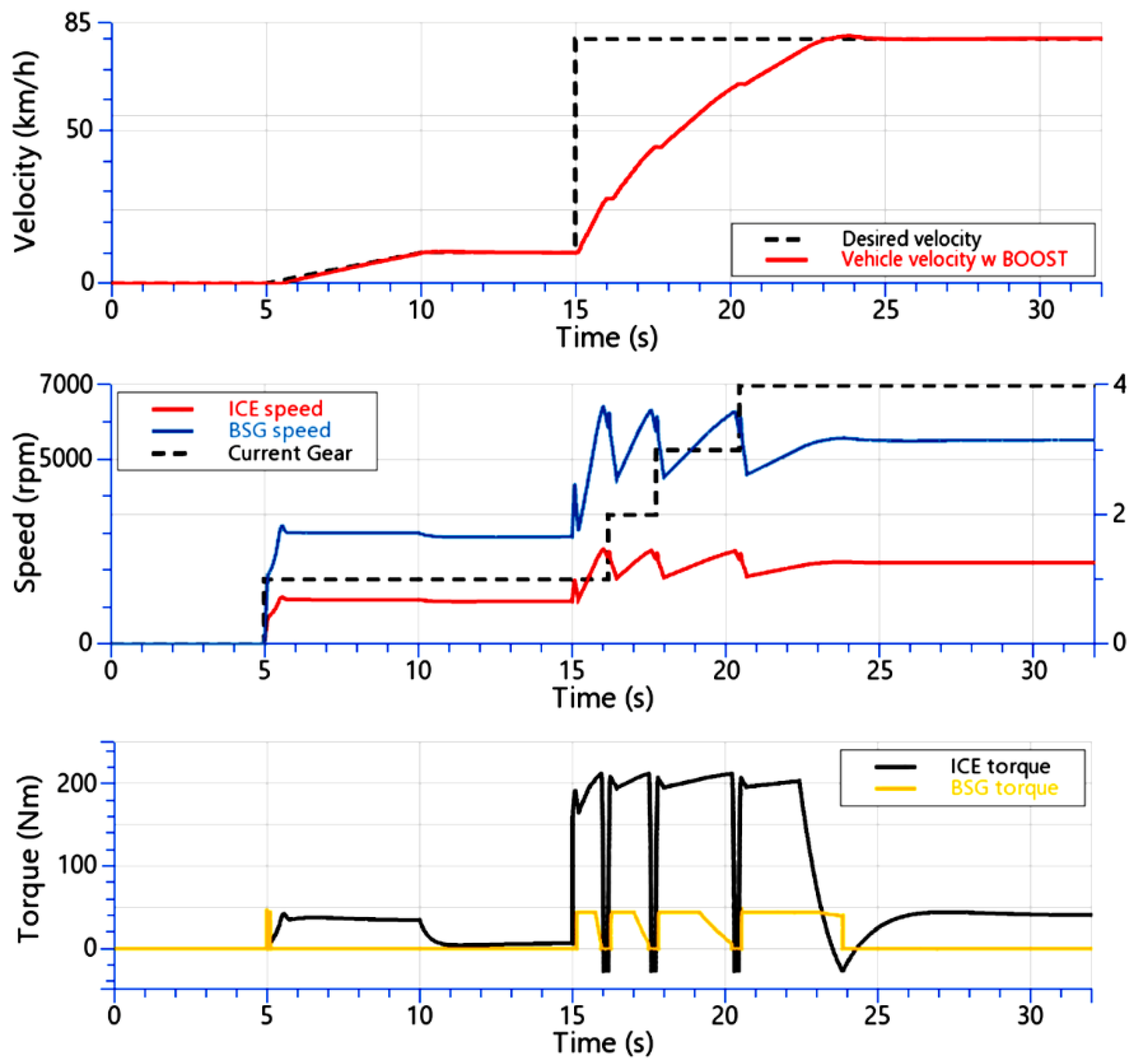
3.2. AVL EXCITE/CRUISE M Environment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations | |
| AC | Alternating current |
| AVL | Anstalt für Verbrenneungskraftmachinen List (company name) |
| BSG | Belt starter generator |
| CO2 | Carbon dioxide |
| DC | Direct current |
| FEAD | Front end accessory drive |
| FMU | Functional Mock-up Unit (model within AVL CRUISETM M software) |
| GHG | Greenhouse gases |
| HIL | Hardware-in-the-Loop |
| ICE | Internal combustion engine |
| HEV | Hybrid electric vehicle |
| FHEV | Full hybrid electric vehicle |
| MHEV | Mild hybrid electric vehicle |
| PHEV | Plug-in hybrid electric vehicle |
| PI | Proportional-integral (controller) |
| Variables | |
| Fbelt | Timing belt transmitted force [N] |
| m | Equivalent torque of the belt-drive rotational model [N⋅m] |
| mBSG, mR | BSG servomachine developed torque and reference value [N⋅m]e |
| mf | Friction torque [N⋅m] |
| vBSG, vICE | Timing belt tangential velocities at BSG and ICE crankshafts [m/s] |
| xBSG, xICE | Timing belt tangential displacements at BSG and ICE crankshafts [m] |
| αBSG, αICE | Timing belt angular displacement at BSG and ICE crankshafts [rad] |
| Δα | Two-mass elastic model angular displacement [rad] |
| Δω | Two-mass elastic model angular velocity (speed) difference [rad/s] |
| ωR, ωBSG | BSG reference speed and actual angular velocity [rad/s] |
| ωICE | ICE angular velocity [rad/s] |
| Parameters | |
| D2, …, Dn | Damping optimum characteristic ratios (dimensionless) |
| D2ω, D3ω | Active damping controller design characteristic ratios (dimensionless) |
| ibelt | Belt drive transmission ratio (dimensionless) |
| JBSG, JICE | BSG and ICE moments of inertia [kg⋅m2] |
| kL | Timing belt equivalent longitudinal stiffness [N/m] |
| kT | Belt drive equivalent torsional stiffness [N⋅m/rad] |
| dL | Timing belt equivalent longitudinal damping factor [N⋅s/m] |
| dT | Belt drive equivalent torsional damping factor [N⋅m⋅s/rad] |
| Kcω | PI controller proportional gain (dimensionless) |
| Tcω | PI controller integral time constant [s] |
| Mmax | Servomachine torque limit value [N⋅m] |
| MC, MS | Coulomb and static friction torque [N⋅m] |
| rBSG, rICE | Timing belt drive crankshaft radii at BSG and ICE side [m] |
| Te, Teω | Equivalent time constant: general case and speed control loop [s] |
| Tm | Current/torque closed-loop system equivalent time constant [s] |
| TΣ | Equivalent overall torque lag in speed control system design [s] |
| δ | Stribeck coefficient (dimensionless) |
| ωs | Stribeck speed [rad/s] |
| Ω0, Ω01, Ω02 | Timing belt drive resonant frequencies [rad/s] |
References
- Saber, A.Y.; Venayagamoorthy, G.K. Plug-in Vehicles and Renewable Energy Sources for Cost and Emission Reductions. IEEE Trans. Ind. Electron. 2011, 58, 1229–1238. [Google Scholar] [CrossRef]
- Hansen, J.; Sato, M.; Kharecha, P.; Beerling, D.; Berner, R.; Masson-Delmotte, V.; Pagani, M.; Raymo, M.; Royer, D.L.; Zachos, J. Target atmospheric CO2: Where should humanity aim? Open Atmos. Sci. J. 2008, 2, 217–231. [Google Scholar] [CrossRef]
- Deur, J.; Škugor, B.; Cipek, M. Integration of Electric Vehicles into Energy and Transport Systems. Automatika 2015, 56, 395–410. [Google Scholar] [CrossRef][Green Version]
- European Commission. Reducing CO2 Emissions from Passenger Cars—Before 2020. Available online: https://ec.europa.eu/clima/policies/transport/vehicles/cars_en (accessed on 15 January 2021).
- Pavković, D.; Cipek, M.; Kljaić, Z.; Mlinarić, T.J.; Hrgetić, M.; Zorc, D. Damping Optimum-Based Design of Control Strategy Suitable for Battery/Ultracapacitor Electric Vehicles. Energies 2018, 11, 2854. [Google Scholar] [CrossRef]
- Bethoux, O. Hydrogen Fuel Cell Road Vehicles: State of the Art and Perspectives. Energies 2020, 13, 5843. [Google Scholar] [CrossRef]
- US Department of Energy. Hybrid and Plug-In Electric Vehicles; DOE/GO-102014-4350. Available online: https://cleancities.energy.gov (accessed on 15 January 2021).
- Xue, Q.; Zhang, X.; Teng, T.; Zhang, J.; Feng, Z.; Lv, Q. A Comprehensive Review on Classification, Energy Management Strategy, and Control Algorithm for Hybrid Electric Vehicles. Energies 2020, 13, 5355. [Google Scholar] [CrossRef]
- Tran, D.D.; Vafaeipour, M.; El Baghdadi, M.; Barrero, R.; Van Mierlo, J.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Sustain. Energy Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Plavac, F. Modelling and Control of Hybrid Propulsion Systems for Multirotor Unmanned Aerial Vehicles. Master’s Thesis, Faculty of Mechanical Engineering and Naval Architecture, University of Zagreb, Zagreb, Croatia, 2020; 135p. [Google Scholar]
- Yong, J.Y.; Ramachandramurty, V.K.; Tan, K.M.; Mithulananthan, N. A review of the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Ito, Y.; Tomura, S.; Moriya, K. Vibration-Reducing Motor Control for Hybrid Vehicles; R&D Review of Toyota CRDL; Toyota Central R&D Labs: Nagakute, Japan, 2005; Volume 40, pp. 37–43. [Google Scholar]
- Hwang, H.-Y.; Lan, T.-S.; Chen, J.-S. Control Strategy Development of Driveline Vibration Reduction for Power-Split Hybrid Vehicles. Appl. Sci. 2020, 10, 1712. [Google Scholar] [CrossRef]
- Cardoso, D.S.; Fael, P.O.; Espírito-Santo, A. A review of micro and mild hybrid systems. Energy Rep. 2020, 6, 385–390. [Google Scholar] [CrossRef]
- Nazari, S.; Siegel, J.; Middleton, R.; Stefanopoulou, A. Power Split Supercharging: A Mild Hybrid Approach to Boost Fuel Economy. Energies 2020, 13, 6580. [Google Scholar] [CrossRef]
- Scamarcio, A.; Gruber, P.; De Pinto, S.; Sorniotti, A. Anti-jerk controllers for automotive applications: A review. Annu. Rev. Control 2020, 50, 174–189. [Google Scholar] [CrossRef]
- Chen, J.-S. Vibration reduction in electric bus during acceleration and gear shifting. Adv. Mech. Eng. 2015, 7, 1–16. [Google Scholar] [CrossRef]
- Cipek, M.; Pavković, D.; Petrić, J. A control-oriented simulation model of a power-split hybrid electric vehicle. Appl. Energy 2013, 101, 121–133. [Google Scholar] [CrossRef]
- Bu, F.; Liu, H.; Huang, W.; Hu, Y.; Degano, M.; Gerada, C.; Rajashekara, K. Induction-Machine–Based Starter/Generator Systems: Techniques, Developments, and Advances. IEEE Ind. Electron. Mag. 2020, 14, 4–19. [Google Scholar] [CrossRef]
- Jurca, F.-N.; Ruba, M. Performance Analysis of an Integrated Starter-Alternator-Booster for Hybrid Electric Vehicles—Chapter 5. In Hybrid Electric Vehicles; IntechOpen: London, UK, 2017; pp. 105–124. [Google Scholar] [CrossRef]
- Jeon, S.; Lee, G.S.; Kang, D.-W.; Kim, W.-H.; Bae, S. Belt-Driven Integrated Starter and Generator Using Planetary Gears for Micro Hybrid Electric Vehicles. IEEE Access 2021, 9, 56201–56213. [Google Scholar] [CrossRef]
- Ossareh, H.R.; Wisotzki, S.; Buckland Seeds, J.; Jankovic, M. An Internal Model Control-Based Approach for Characterization and Controller Tuning of Turbocharged Gasoline Engines. IEEE Trans. Control Syst. Technol. 2021, 29, 866–875. [Google Scholar] [CrossRef]
- Atzler, F.; Wegerer, M.; Mehne, F.; Rohrer, S.; Rathgeber, C.; Fischer, S. Fuel Consumption and Emissions Effects in Passenger Car Diesel Engines through the Use of a Belt Starter Generator; SAE Technical Paper 2015-01-1162; SAE International: Warrendale, PA, USA, 2015. [Google Scholar] [CrossRef]
- Lee, H.; Lee, K. Comparative Evaluation of the Effect of Vehicle Parameters on Fuel Consumption under NEDC and WLTP. Energies 2020, 13, 4245. [Google Scholar] [CrossRef]
- Millo, F.; Accurso, F.; Zanelli, A.; Rolando, L. Numerical Investigation of 48 V Electrification Potential in Terms of Fuel Economy and Vehicle Performance for a Lambda-1 Gasoline Passenger Car. Energies 2019, 12, 2998. [Google Scholar] [CrossRef]
- Dwars, S. Recent Advances in Soft Torque Rotary Systems. In Proceedings of the 3rd International Colloquium on Nonlinear Dynamics and Control of Deep Drilling Systems, Minneapolis, MN, USA, 29–30 May 2014; pp. 29–44. [Google Scholar]
- Fossati, G.G.; Fadel Miguel, L.F.; Paucar Casas, W.J. Multi-objective optimization of the suspension system parameters of a full vehicle model. Optim. Eng. 2019, 20, 151–177. [Google Scholar] [CrossRef]
- Fadel Miguel, L.F.; Fadel Miguel, L.F.; Holdorf Lopez, R. A firefly algorithm for the design of force and placement of friction dampers for control of man-induced vibrations in footbridges. Optim. Eng. 2015, 16, 633–661. [Google Scholar] [CrossRef]
- Jansen, J.D.; van den Steen, L. Active Damping of Self-Excited Torsional Vibrations in Oil Well Drill-strings. J. Sound Vib. 1995, 179, 647–668. [Google Scholar] [CrossRef]
- Batzies, E.; Katthän, L.; Welker, V.; Zirn, O. Commissioning rules for optimal velocity controller damping of servo axes using elimination methods. Optim. Eng. 2015, 16, 183–201. [Google Scholar] [CrossRef]
- Feng, X.; Shangguan, W.-B.; Deng, J.; Jing, X. Modeling and dynamic analysis of accessory drive systems with integrated starter generator for micro-hybrid vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 1162–1177. [Google Scholar] [CrossRef]
- Hsieh, F.-C.; Huang, Y.-D.; Peng, Y.-W. Improving the Stability and Fuel Economy for Belt-Starter Generator Mild HEV at Idle Speed Using Model Predict Control. In Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering (CASE), Taipei, Taiwan, 18–22 August 2014; pp. 916–921. [Google Scholar]
- Guan, J.-C.; Chen, B.-C.; Huang, Y.-D.; Chiu, Y.-J. Adaptive Power Management Strategy for Hybrid Electric Vehicle with Belt-driven Starter Generator. In Proceedings of the 2015 IEEE 12th International Conference on Networking, Sensing and Control, Taipei, Taiwan, 9–11 April 2015; pp. 503–508. [Google Scholar]
- Naslin, P. Essentials of Optimal Control; Illife Books: London, UK, 1968. [Google Scholar]
- Schröder, D. Elektrische Antriebe—Regelung von Antriebssystemen; Springer: Berlin/Heidelberg, Germany, 2007; pp. 814–865. [Google Scholar]
- Pavković, D.; Šprljan, P.; Cipek, M.; Krznar, M. Cross-axis control system design for borehole drilling based on damping optimum criterion and utilization of proportional-integral controllers. Optim. Eng. 2021, 22, 51–81. [Google Scholar] [CrossRef]
- Matlab Software. Available online: https://www.mathworks.com (accessed on 20 April 2021).
- AVL Software. Available online: https://www.avl.com (accessed on 20 April 2021).
- Els, P. What Electric Vehicle and Electrification Strategies Are Available to Manufacturers. Available online: https://www.automotive-iq.com/electrics-electronics/articles/automotive-iq-guides-electric-vehicles (accessed on 5 March 2020).
- Schöffmann, W.; Sorger, H.; Ennemosser, A.; Priestner, C.; Hütter, M.; Klarin, B. The impact of 48V to friction and efficiency optimization of the base engine—Approach for quantification in future driving cycles. In Reibungsminimierung im Antriebsstrang 2016; Springer Vieweg: Wiesbaden, Germany, 2 November 2017. [Google Scholar]
- Continental, A.G. Low Voltage, High Performance: Full-Hybrid Vehicle with 48-Volt High-Power Technology. Available online: https://www.continental.com (accessed on 20 April 2021).
- Liao, Y.-J.G.; Quail, A.M., Jr. Experiment and Simulation of Medium-Duty Tactical Truck for Fuel Economy Improvement. Energies 2011, 4, 276–293. [Google Scholar] [CrossRef]
- Esser, A.; Eichenlaub, T.; Schleiffer, J.-E.; Jardin, P.; Rinderknecht, S. Comparative evaluation of powertrain concepts through an eco-impact optimization framework with real driving data. Optim. Eng. 2021, 22, 1001–1029. [Google Scholar] [CrossRef]
- Azad, N.L.; Mozaffari, A.; Vajedi, M.; Masoudi, Y. Chaos oscillator differential search combined with Pontryagin’s minimum principle for simultaneous power management and component sizing of PHEVs. Optim. Eng. 2016, 17, 727–760. [Google Scholar] [CrossRef]
- Klein, B.; Maiwald, O. 48 Volt Technology for More Efficiency and Fun to Drive; Die Bibliothek der Technik, SZ Scala GmbH: Berlin, Germany, 2016; Volume 388, p. 74. [Google Scholar]
- Williams, B.W. Power Electronics: Devices, Drivers, Applications and Passive Components; McGraw-Hill: New York, NY, USA, 1992. [Google Scholar]
- Schröder., C.; Stuffer, A. P0 Mild Hybrid with System Competence to Maximum Efficiency. In Proceedings of the Schaeffler Symposium 2018—Mobility for Tomorrow, Baden-Baden, Germany, 11–13 April 2018. [Google Scholar]
- Novotny, D.W.; Lipo, T.A. Vector Control and Dynamics of AC Drives; Oxford University Press: Oxford, UK, 1996. [Google Scholar]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons: Chichester, UK, 2012. [Google Scholar]
- Dresig, H.; Holzweißig, F. Dynamics of Machinery—Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2010; ISBN 9783540899396. [Google Scholar] [CrossRef]
- Pavković, D.; Deur, J.; Lisac, A. A torque estimator-based control strategy for oil-well drill-string torsional vibrations active damping including an auto-tuning algorithm. Control Eng. Pract. 2011, 19, 836–850. [Google Scholar] [CrossRef]
- Armstrong-Hélouvry, B.; Dupont, P.; Canudas-de-Wit, C. A Survey of Models, Analysis Tools and Compensation Methods for the Control of Machines with Friction. Automatica 1994, 30, 1083–1138. [Google Scholar] [CrossRef]
- Kiencke, U.; Nielsen, L. Automotive Control Systems; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Si, Y.; Liu, Y.; Liu, C.; Zhang, Z.; Wang, M.; Lei, Q. A High Current High Power Density Motor Drive for a 48-Volt Belt-Driven Starter Generator (BSG) System. IEEE Open J. Ind. Appl. 2021, 2, 235–250. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Description | Value |
|---|---|
| BSG moment of inertia JBSG | 0.003 kg m2 |
| ICE moment of inertia JICE | 0.12 kg m2 |
| Timing belt drive crankshaft radius at BSG side rBSG | 0.0316 m |
| Timing belt drive crankshaft radius at ICE side rICE | 0.0753 m |
| Timing belt equivalent longitudinal stiffness kL | 47,520 N/m |
| Timing belt equivalent longitudinal damping factor dL | 10 Ns/m |
| Belt drive equivalent torsional stiffness kT | 269.4 Nm/rad |
| Belt drive equivalent torsional damping factor dL | 0.057 Nms/rad |
| Belt drive transmission ratio ibelt | 2.383 |
| Torque closed-loop system equivalent time constant Tm | 0.16 ms |
| Equivalent overall lag in speed control system design T∑ | 0.2 ms |
| Coulomb friction torque MC | 9 Nm |
| Static friction torque MS | 12 Nm |
| Stribeck coefficient δ | 1.0 |
| Stribeck speed ωs | 0.01 rad/s |
| Parameter Description | Value | |
|---|---|---|
| Symmetrical optimum (stiff) tuning of PI controller | PI controller proportional gain Kcω | 11.92 |
| PI controller integral time constant Tcω | 4 ms | |
| Active damping tuning of PI controller | PI controller proportional gain Kcω | 1.07 |
| PI controller integral time constant Tcω | 60 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pavković, D.; Cipek, M.; Plavac, F.; Karlušić, J.; Krznar, M. Internal Combustion Engine Starting and Torque Boosting Control System Design with Vibration Active Damping Features for a P0 Mild Hybrid Vehicle Configuration. Energies 2022, 15, 1311. https://doi.org/10.3390/en15041311
Pavković D, Cipek M, Plavac F, Karlušić J, Krznar M. Internal Combustion Engine Starting and Torque Boosting Control System Design with Vibration Active Damping Features for a P0 Mild Hybrid Vehicle Configuration. Energies. 2022; 15(4):1311. https://doi.org/10.3390/en15041311
Chicago/Turabian StylePavković, Danijel, Mihael Cipek, Filip Plavac, Juraj Karlušić, and Matija Krznar. 2022. "Internal Combustion Engine Starting and Torque Boosting Control System Design with Vibration Active Damping Features for a P0 Mild Hybrid Vehicle Configuration" Energies 15, no. 4: 1311. https://doi.org/10.3390/en15041311
APA StylePavković, D., Cipek, M., Plavac, F., Karlušić, J., & Krznar, M. (2022). Internal Combustion Engine Starting and Torque Boosting Control System Design with Vibration Active Damping Features for a P0 Mild Hybrid Vehicle Configuration. Energies, 15(4), 1311. https://doi.org/10.3390/en15041311