
Modeling of Thermal-Lag Engine with Validation by Experimental Data



Abstract
1. Introduction
2. Computational Fluid Dynamics Model
2.1. Configuration of Thermal-Lag Engine
2.2. Governing Equations
- The working gas equation of state is ideal;
- The gravity effect on the flow and thermal fields is neglected;
- Local thermal equilibrium in the regenerator is assumed.
2.3. Initial-Boundary Conditions
3. Preliminary Numerical Checks
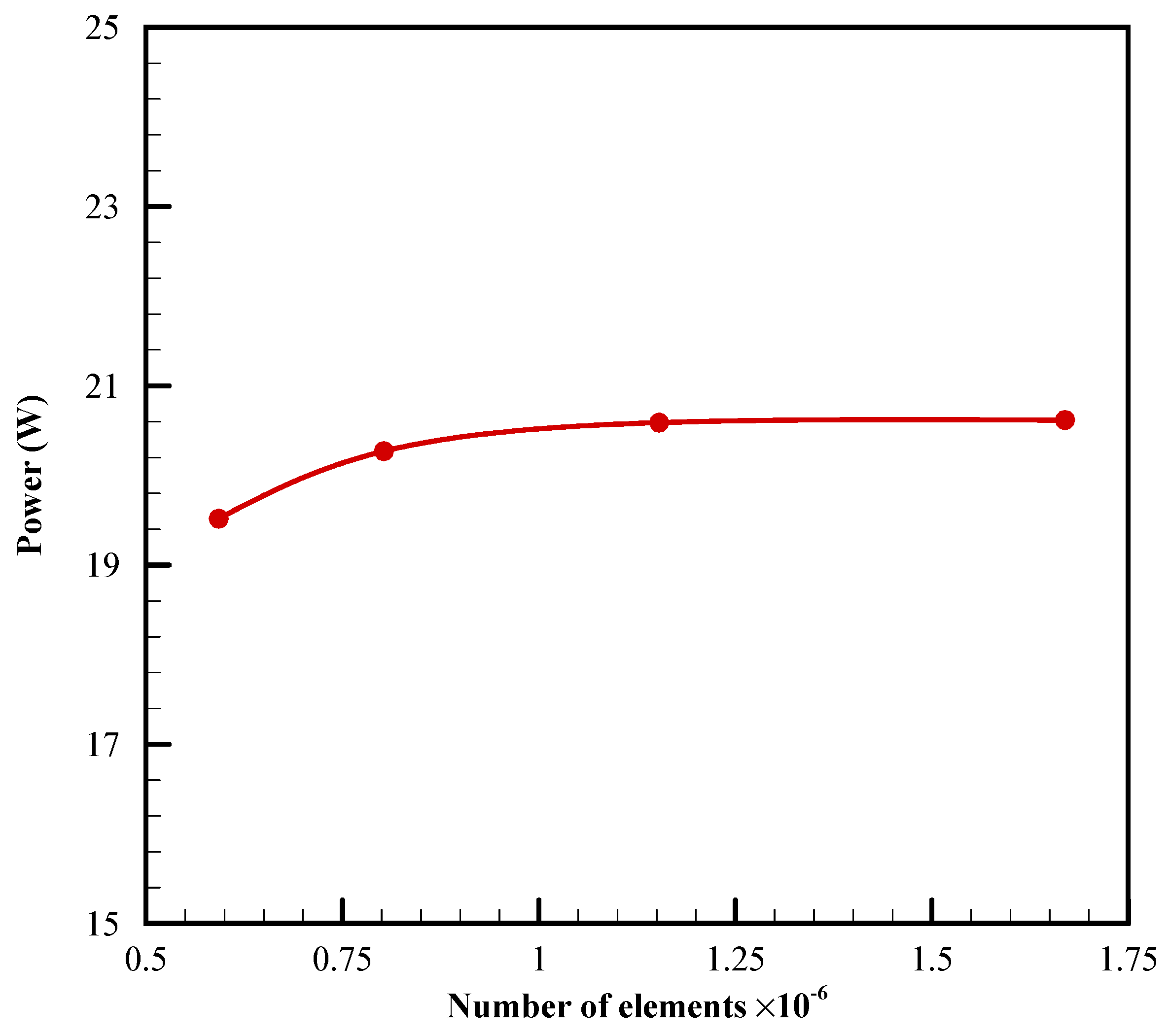
3.1. Grid Independence Check
3.2. Time Step Independence Check
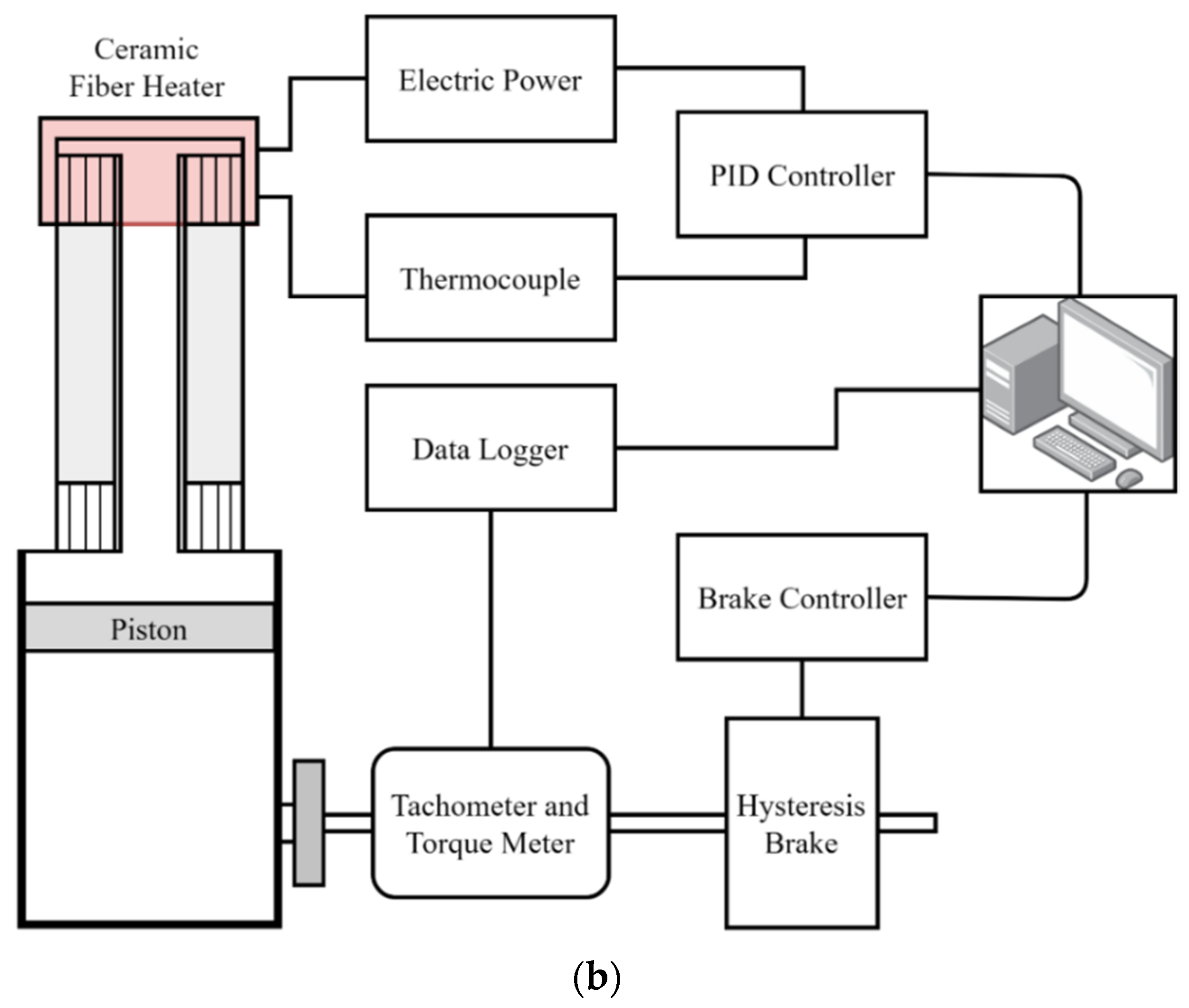
4. Experimental System
5. Results and Discussion
6. Conclusions
- The CFD results are remarkably close to the experimental data over the wide range of engine speeds from 200 to 1600 rpm at the temperature of 1273 K. The experiments show that the maximum power of 22.35 W can be reached at 1273 K and 1000 rpm, and the CFD model prediction is 21.1 W. However, the error of the numerical predictions will be larger if the heating temperature is lowered. Furthermore, from the experimental data, the current design produces high power at high heating temperatures. In contrast, its power becomes impractical with heating temperatures below 700 K. This raises the demand for modifying the current design to get higher power at a lower temperature.
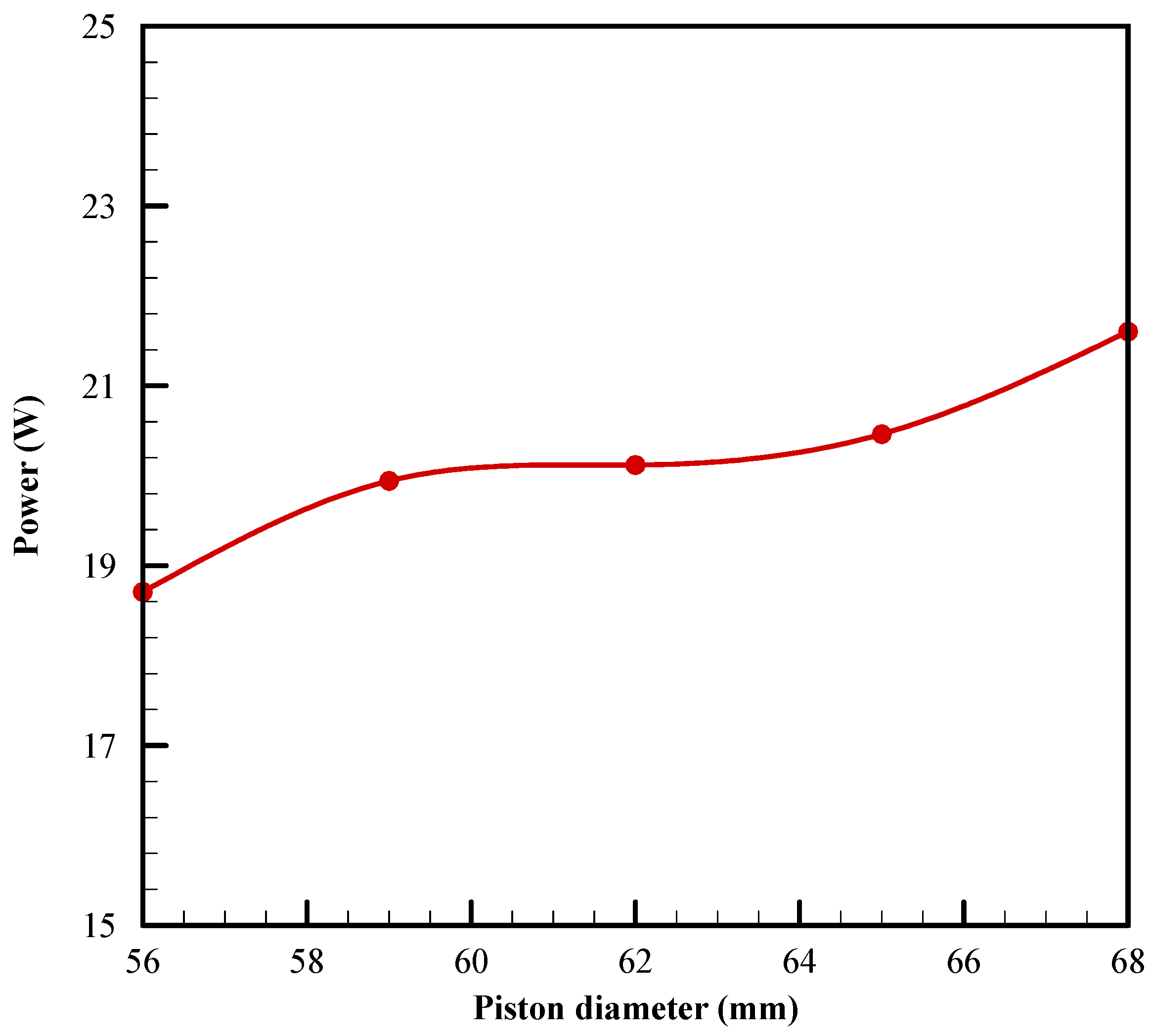
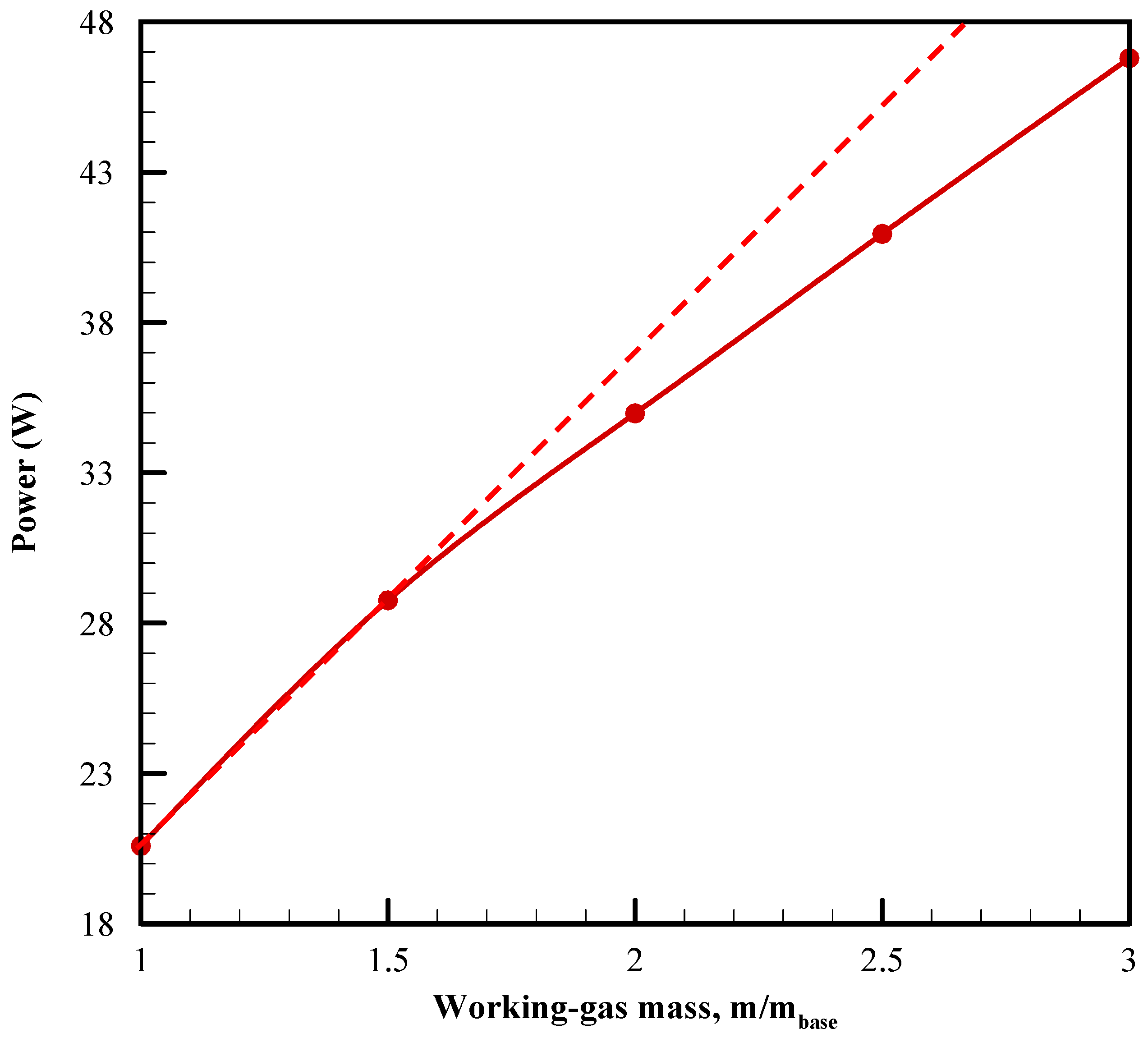
- The effects of the influential geometrical and operational parameters on the power of the engine are evaluated by the present CFD model. The parametric study shows that the crank radius, the piston diameter, the working gas mass, and the heating temperature significantly affect the engine power. It is found that as the crank radius is increased from 20 mm to 30 mm, the power rises approximately linearly from 14.3 to 28.5 W. As the piston diameter varies from 56 mm to 68 mm, the engine power rises from 18.7 W to 21.6 W. Meanwhile, it is found that the mass of the working gas has a strong effect on the engine power. As the mass ratio increases from 1 to 3.0, the engine power grows approximately linearly from 20.6 W to 46.8 W. In this study, the engine power is elevated from 13.6 to 20.6 W at 973 and 1273 K, respectively.
- Based on the obtained results regarding the dependence of engine power on the working gases used, it is seen that changing the gas is possible to significantly enhance the power of the engine. Results show that the highest engine power is generated with hydrogen and the lowest is with air. However, since hydrogen is highly flammable, it is not recommended to be the working gas, despite the power. Alternatively, helium is recommended since it is not flammable and the relative difference in power between helium and hydrogen is only within 10%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Breeze, P. Stirling Engines and Free Piston Engines. In Piston Engine-Based Power Plants; Elsevier: Amsterdam, The Netherlands, 2018; pp. 59–70. [Google Scholar] [CrossRef]
- Islam, M.; Hasanuzzaman, M.; Pandey, A.; Rahim, N. Modern energy conversion technologies. In Energy for Sustainable Development: Demand, Supply, Conversion and Management; Hasanuzzaman, M., Rahim, N.A., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 19–39. [Google Scholar]
- Varbanov, P.; Klemeš, J. Small and micro combined heat and power (CHP) systems for the food and beverage processing industries. In Small and Micro Combined Heat and Power (CHP) Systems: Advanced Design, Performance, Materials and Applications; Beith, R., Ed.; Elsevier: Amsterdam, The Netherlands, 2011; pp. 395–426. [Google Scholar]
- Nagaoka, Y.; Nakamura, M.; Yamashita, K.; Ito, Y.; Haramura, S.; Yamaguchi, K. Development of Stirling Engine Heat Pump. In Heat Pumps: Solving Energy and Environmental Challenges; Saito, T., Ed.; Elsevier: Amsterdam, The Netherlands, 1990; pp. 595–603. [Google Scholar]
- Yang, H.-S.; Cheng, C.-H. A nonlinear non-dimensional dynamic model for free piston thermal-lag Stirling engine. Energy Procedia 2014, 61, 2662–2665. [Google Scholar] [CrossRef][Green Version]
- Chen, N.; West, C. A single-cylinder valveless heat engine. In Proceedings of the 22nd Intersociety Energy Conversion Engineering Conference, Philadelphia, PA, USA, 10–14 August 1987; p. 9070. [Google Scholar]
- Tailer, P.L. External combustion Otto cycle thermal lag engine. In Proceedings of the 28th Intersociety Energy Conversion Engineering Conference, Atlanta, GA, USA, 8–13 August 1993; pp. 943–947. [Google Scholar]
- Wicks, F.; Caminero, C. The Peter Tailer external combustion thermal lag piston/cylinder engine analysis and potential applications. In Proceedings of the 29th Intersociety Energy Conversion Engineering Conference, Monterey, CA, USA, 7–12 August 1994; pp. 951–954. [Google Scholar]
- Arques, P. Theoretical and numerical study, improvement of the Wicks-Tailer cycle. In Proceedings of the 30th Intersociety Energy Conversion Engineering Conference, Orlando, FL, USA, 30 July–5 August 1995; pp. 407–412. [Google Scholar]
- Altamirano, C.F.-A.; Moldenhauer, S.; Bayón, J.G.; Verhelst, S.; De Paepe, M. A two control volume model for the Thermal Lag Engine. Energy Convers. Manag. 2014, 78, 565–573. [Google Scholar] [CrossRef]
- Cheng, C.-H.; Yang, H.-S. Theoretical model for predicting thermodynamic behavior of thermal-lag Stirling engine. Energy 2013, 49, 218–228. [Google Scholar] [CrossRef]
- Cheng, C.-H.; Yang, H.-S.; Jhou, B.-Y.; Chen, Y.-C.; Wang, Y.-J. Dynamic simulation of thermal-lag Stirling engines. Appl. Energy 2013, 108, 466–476. [Google Scholar] [CrossRef]
- Yang, H.-S.; Cheng, C.-H. Stability analysis of thermal-lag Stirling engines. Appl. Therm. Eng. 2016, 106, 712–720. [Google Scholar] [CrossRef]
- Yang, H.-S.; Cheng, C.-H. Theoretical solutions for power output of thermal-lag Stirling engine. Int. J. Heat Mass Transfer 2017, 111, 191–200. [Google Scholar] [CrossRef]
- Alborzi, M.; Sarhaddi, F.; Sobhnamayan, F. Optimization of the thermal lag Stirling engine performance. Energy Environ. 2019, 30, 156–175. [Google Scholar] [CrossRef]
- ElDebawy, M.; Beshay, K.R.; Fernandez-Aballi, C.; Khalil, E.E. CFD Analyses of Thermal Lag Engine. In Proceedings of the AIAA Propulsion and Energy 2019 Forum, Indiana, IN, USA, 19–22 August 2019; p. 4063. [Google Scholar]
- Yang, H.-S.; Cheng, C.-H.; Ali, M.A. Performance and operating modes of a thermal-lag Stirling engine with a flywheel. Appl. Therm. Eng. 2022, 205, 118061. [Google Scholar] [CrossRef]
- Cheng, C.-H.; Phung, D.-T. Numerical Optimization of the β-Type Stirling Engine Performance Using the Variable-Step Simplified Conjugate Gradient Method. Energies 2021, 14, 7835. [Google Scholar] [CrossRef]
- Udeh, G.T.; Michailos, S.; Ingham, D.; Hughes, K.J.; Ma, L.; Pourkashanian, M. A new non-ideal second order thermal model with additional loss effects for simulating beta Stirling engines. Energy Convers. Manag. 2020, 206, 112493. [Google Scholar] [CrossRef]
- Cheng, C.-H.; Tan, Y.-H. Numerical optimization of a four-cylinder double-acting Stirling engine based on non-ideal adiabatic thermodynamic model and scgm method. Energies 2020, 13, 2008. [Google Scholar] [CrossRef]
- El-Ghafour, S.; El-Ghandour, M.; Mikhael, N. Three-dimensional computational fluid dynamics simulation of Stirling engine. Energy Convers. Manag. 2019, 180, 533–549. [Google Scholar] [CrossRef]
- Ben-Mansour, R.; Abuelyamen, A.; Mokheimer, E.M. CFD analysis of radiation impact on Stirling engine performance. Energy Convers. Manag. 2017, 152, 354–365. [Google Scholar] [CrossRef]
- Caetano, B.C.; Lara, I.F.; Borges, M.U.; Sandoval, O.R.; Valle, R.M. A novel methodology on beta-type Stirling engine simulation using CFD. Energy Convers. Manag. 2019, 184, 510–520. [Google Scholar] [CrossRef]
- Lin, H.-H. Theoretical Analysis and Optimal Design of a Pulse-Tube Stirling Engine. Master’s Thesis, National Cheng-Kung University, Tainan, Taiwan, 2014. [Google Scholar]
- Boroujerdi, A.; Esmaeili, M. Characterization of the frictional losses and heat transfer of oscillatory viscous flow through wire-mesh regenerators. Alex. Eng. J. 2015, 54, 787–794. [Google Scholar] [CrossRef]
- ANSYS Inc. ANSYS Fluent Theory Guide: Release 18.0; ANSYS Inc.: Canonsburg, PA, USA, 2017. [Google Scholar]
- Kuehl, H. Numerically efficient modelling of non-ideal gases and their transport properties in Stirling cycle simulation. In Proceedings of the 17th International Stirling Engine Conference and Exhibition, Newcastle upon Tyne, UK, 24–26 August 2016; pp. 572–579. [Google Scholar]
- Toro, E.F. Riemann Solvers and Numerical Methods for Fluid Dynamics: A Practical Introduction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1997; p. 592. [Google Scholar]
- Chen, W.-L.; Yang, Y.-C.; Salazar, J.L. A CFD parametric study on the performance of a low-temperature-differential γ-type Stirling engine. Energy Convers. Manag. 2015, 106, 635–643. [Google Scholar] [CrossRef]
- Van Wylen, G.; Sonntag, R.; Borgnakke, C. Fundamentals of Classical Thermodynamics, 4th ed.; John Wiley and Sons: Hoboken, NJ, USA, 1993. [Google Scholar]
- Katooli, M.H.; Moghadam, R.A.; Hooshang, M. Investigation on effective operating variables in gamma-type Stirling engine performance: A simulation approach. SN Appl. Sci. 2020, 2, 725. [Google Scholar] [CrossRef]
- Cheng, C.-H.; Le, Q.-T.; Huang, J.-S. Numerical prediction of performance of a low-temperature-differential gamma-type Stirling engine. Numer. Heat Transf. A Appl. 2018, 74, 1770–1785. [Google Scholar] [CrossRef]
- Erol, D.; Çalışkan, S. The examination of performance characteristics of a beta-type Stirling engine with a rhombic mechanism: The influence of various working fluids and displacer piston materials. Int. J. Energy Res. 2021, 45, 13726–13747. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometry Parameters | |||
| Crank radius (mm) | 25 | Piston diameter (mm) | 65 |
| Rod length (mm) | 103 | Cooler height (mm) | 18 |
| Inner diameter (mm) | 18 | Regenerator height (mm) | 130 |
| Outer diameter (mm) | 38 | Heater-fin height (mm) | 35 |
| Number of heater fins | 50 | Swept volume (cm3) | 166 |
| Number of cooler fins | 50 | Compression ratio | 1.65 |
| Operating parameters | |||
| Hot temperature (K) | 1273 | Rotation speed (rpm) | 800 |
| Cold temperature (K) | 298 | Working gas mass (g) | 0.369 |
| Boundary Conditions | ||
| Temperature Field | Heater fins Heater head, (K) | 1273 |
| Compression chamber Cooler fins, (K) | 298 | |
| Inner cylinder wall (K) | Distribution profile is shown in Figure 1a | |
| The other walls | Adiabatic | |
| Flow Field | (m/s) | No-slip |
| (m2/s2) | Standard wall functions [26] | |
| (m2/s3) | ||
| Initial Conditions | ||
| Temperature Field | Heater head Heater fins (K) | 1273 |
| Compression chamber Cooler fins (K) | 298 | |
| The other chambers (K) | 785.5 | |
| Flow Field | Charged pressure (bar) | 1 |
| (m/s) | 0 | |
| (m2/s2) | 1 | |
| (m2/s3) | 1 | |
| Piston Position | Crank angle (deg) | 270 |
| Spatial Discretization Schemes | |
| Density Momentum Energy | Second-order upwind |
| Turbulent dissipation rate Turbulent kinetic energy | First-order upwind |
| Temporal discretization schemes | |
| Transient terms | First-order implicit |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, C.-H.; Phung, D.-T. Modeling of Thermal-Lag Engine with Validation by Experimental Data. Energies 2022, 15, 7688. https://doi.org/10.3390/en15207688
Cheng C-H, Phung D-T. Modeling of Thermal-Lag Engine with Validation by Experimental Data. Energies. 2022; 15(20):7688. https://doi.org/10.3390/en15207688
Chicago/Turabian StyleCheng, Chin-Hsiang, and Duc-Thuan Phung. 2022. "Modeling of Thermal-Lag Engine with Validation by Experimental Data" Energies 15, no. 20: 7688. https://doi.org/10.3390/en15207688
APA StyleCheng, C.-H., & Phung, D.-T. (2022). Modeling of Thermal-Lag Engine with Validation by Experimental Data. Energies, 15(20), 7688. https://doi.org/10.3390/en15207688