
Scalable Residential Building Geometry Characterisation Using Vehicle-Mounted Camera System




Abstract
:1. Introduction
- proposal of a novel top-down approach, completely based on street-view style image data, on building reconstruction;
- acquiring building geometry data that is essential for building energy analysis using the reconstructed building model.
2. Methodology—Residential Building Geometry Characterisation
2.1. Data Collection and Pre-Processing
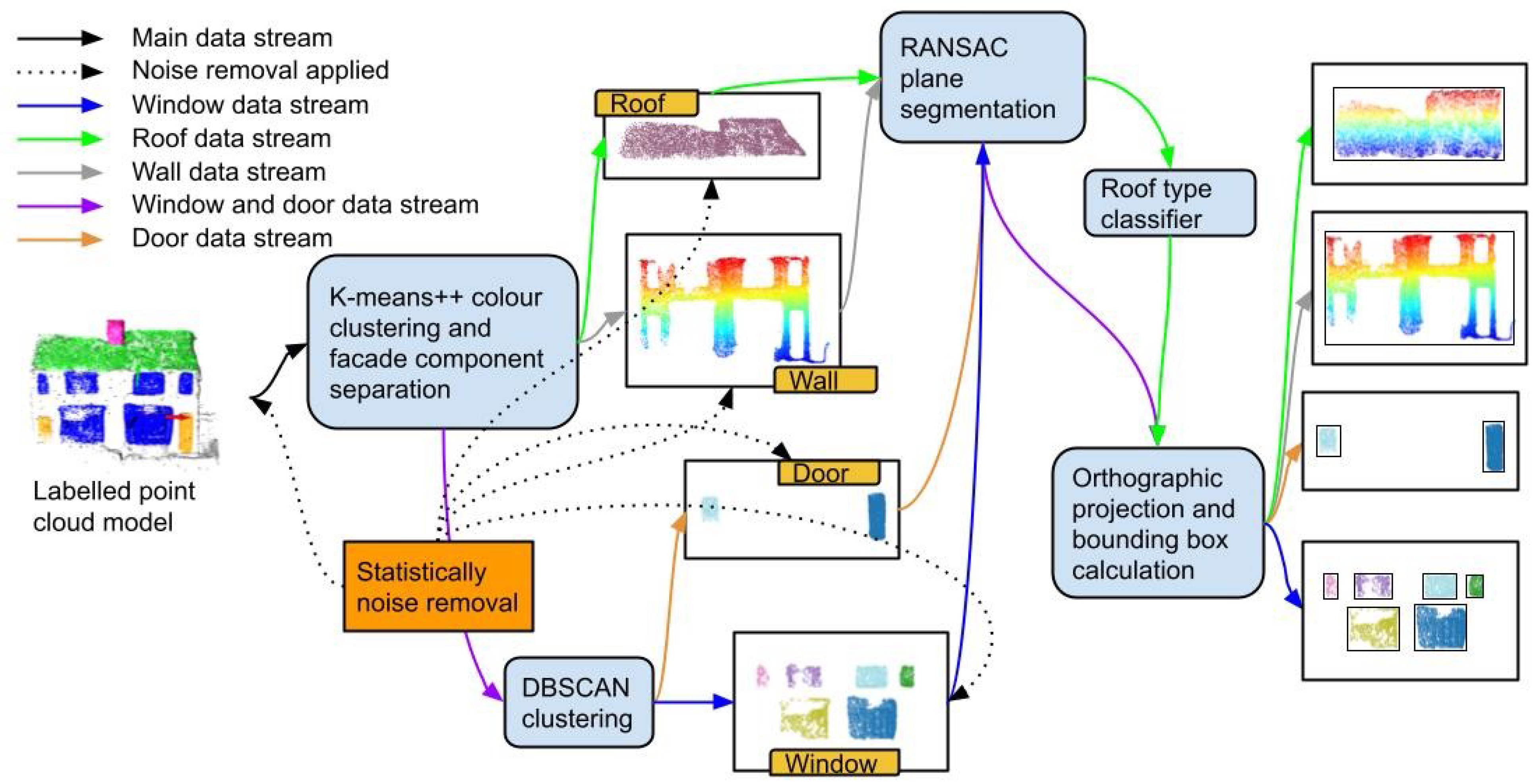
2.2. The Automatic Building Measurement Pipeline
3. Experiments and Validation Results
3.1. Experiments Setup and Dataset
3.2. Results
4. Discussion and Conclusions
4.1. Discussion and Future Work
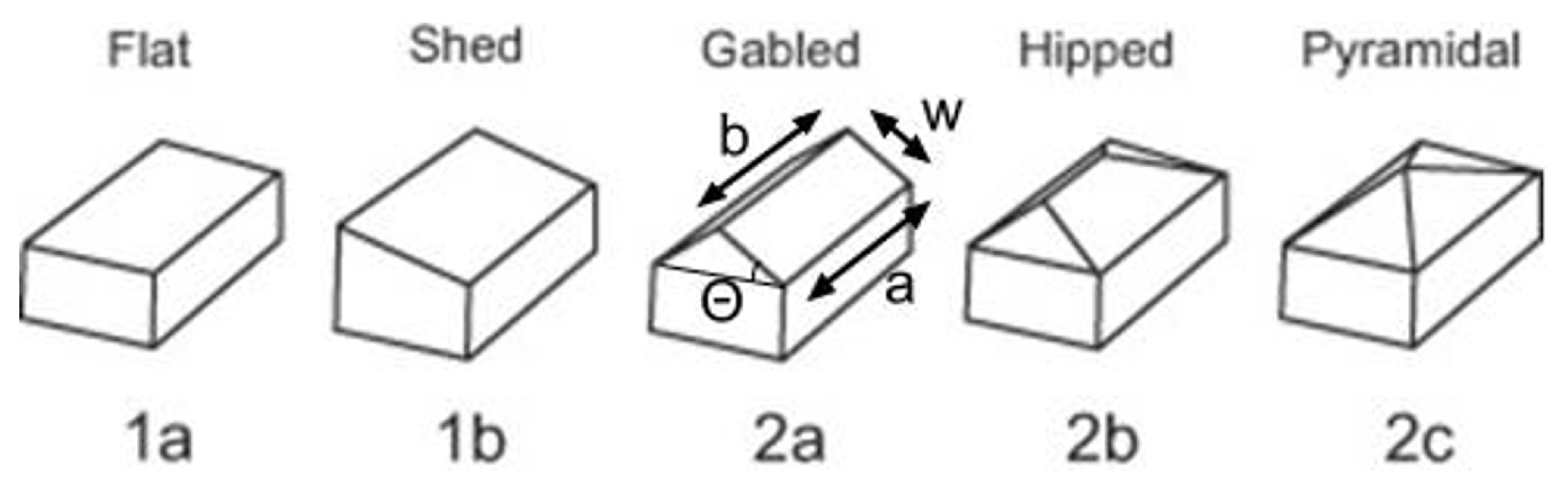
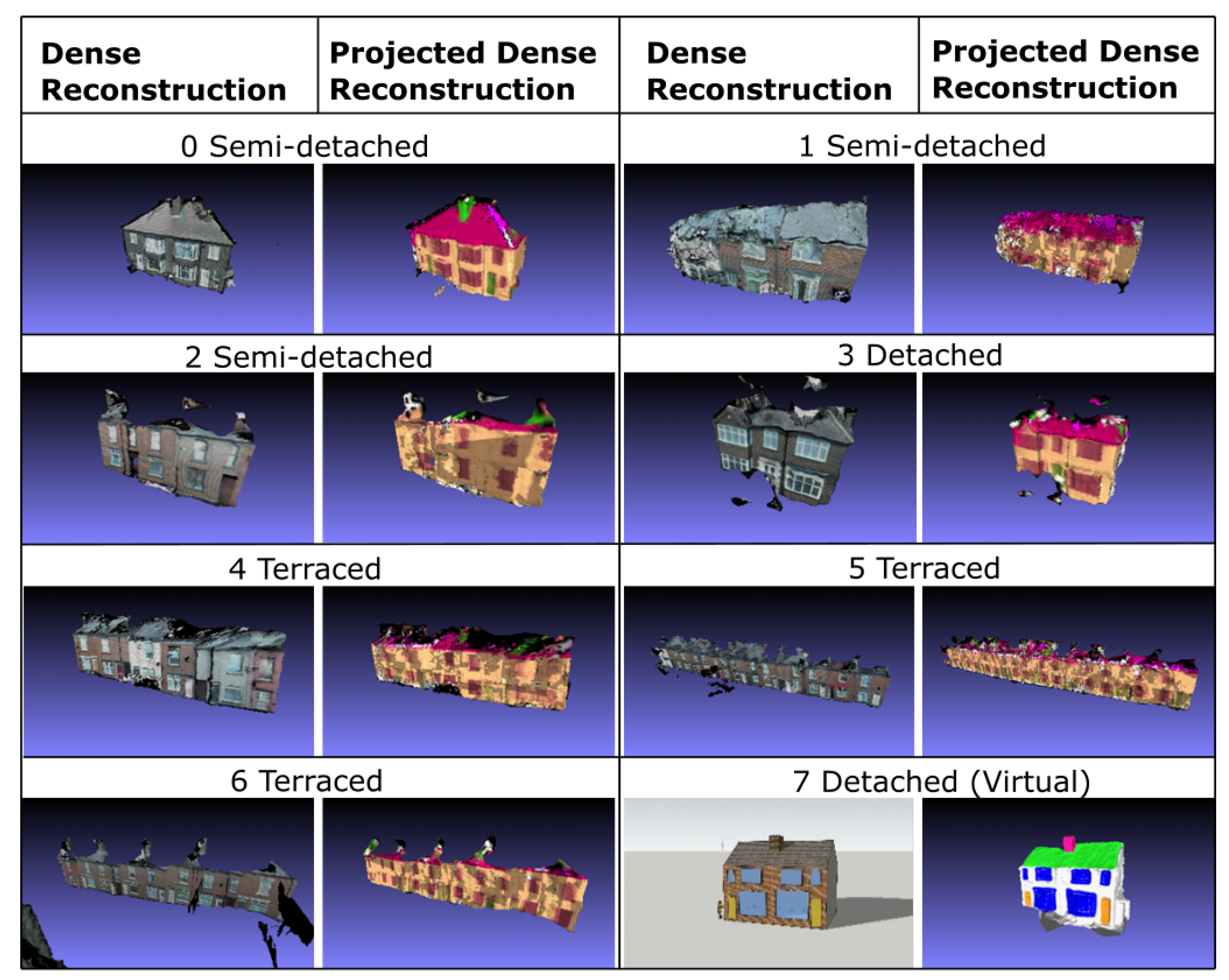
- The building library is limited. At this stage, only the most common pitched roof building is considered. Although Equation (2) shows that the roof area differences among the different pitched roofs are not very distinct. In model 0, a 14 per cent error is still observed, which is larger than the 9% estimation. Besides that, model 3 has an attic, which leads to a distinct error in measuring the wall height. Therefore, the developed method is needed to expand the building library to facilitate more robust measurements across different types of buildings;
- The complex terrain is another problem that affects the pipeline performance. If the building is built on a slope, the shape of the building would become rhomboid instead of rectangular. This will lead to a higher building height measurement. An improvement in how to cope with the complex terrains is also important;
- In this study, all building models are assumed to have a transversal axis of symmetry as the vehicle-mounted data-capturing system can only collect the facade data. The assumption is reasonable in many cases but not adequate for many other cases. Therefore, developing a strategy that can make more accurate assumptions about the building structure is essential.
4.2. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Arora, N.K.; Mishra, I. United Nations Sustainable Development Goals 2030 and environmental sustainability: Race against time. Environ. Sustain. 2019, 2, 339–342. [Google Scholar] [CrossRef] [Green Version]
- Department for Business, Energy & Industrial Strategy, U.G. Final UK Greenhouse Gas Emissions National Statistics: 1990 to 2019 Summary; Technical Report; UK Government: London, UK, 2020.
- Department for Business, Energy & Industrial Strategy, U.G. UK Energy in Brief. In National Statistics; 2020; pp. 1–22. Available online: https://www.gov.uk/government/statistics/uk-energy-in-brief-2020 (accessed on 26 July 2022).
- Committee on Climate Change. UK Housing: Fit for the Future?—Climate Change Committee. Available online: https://www.theccc.org.uk/publication/uk-housing-fit-for-the-future/ (accessed on 26 July 2022).
- Dai, M.; Ward, W.O.; Meyers, G.; Densley Tingley, D.; Mayfield, M. Residential building facade segmentation in the urban environment. Build. Environ. 2021, 199, 107921. [Google Scholar] [CrossRef]
- Arbabi, H.; Lanau, M.; Li, X.; Meyers, G.; Dai, M.; Mayfield, M.; Densley Tingley, D. A scalable data collection, characterization, and accounting framework for urban material stocks. J. Ind. Ecol. 2021, 26, 58–71. [Google Scholar] [CrossRef]
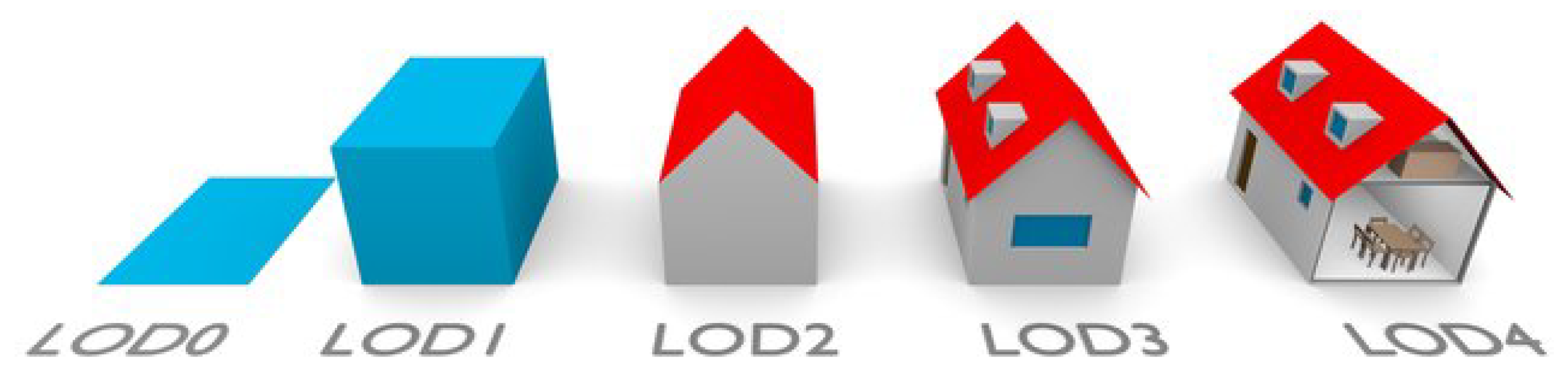
- Huang, H.; Michelini, M.; Schmitz, M.; Roth, L.; Mayer, H. LOD3 BUILDING RECONSTRUCTION from MULTI-SOURCE IMAGES. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives, Nice, France, 31 August–2 September 2020; Volume 43, pp. 427–434. [Google Scholar] [CrossRef]
- Cheng, L.; Gong, J.; Li, M.; Liu, Y. 3D building model reconstruction from multi-view aerial imagery and lidar data. Photogramm. Eng. Remote Sens. 2011, 77, 125–139. [Google Scholar] [CrossRef]
- Alidoost, F.; Arefi, H.; Tombari, F. 2D image-to-3D model: Knowledge-based 3D building reconstruction (3DBR) using single aerial images and convolutional neural networks (CNNs). Remote Sens. 2019, 11, 2219. [Google Scholar] [CrossRef] [Green Version]
- Yu, D.; Ji, S.; Liu, J.; Wei, S. Automatic 3D building reconstruction from multi-view aerial images with deep learning. ISPRS J. Photogramm. Remote Sens. 2021, 171, 155–170. [Google Scholar] [CrossRef]
- Crawley, D.B.; Lawrie, L.K.; Winkelmann, F.C.; Buhl, W.F.; Huang, Y.J.; Pedersen, C.O.; Strand, R.K.; Liesen, R.J.; Fisher, D.E.; Witte, M.J.; et al. EnergyPlus: Creating a new-generation building energy simulation program. Energy Build. 2001, 33, 319–331. [Google Scholar] [CrossRef]
- Lanau, M.; Liu, G.; Kral, U.; Wiedenhofer, D.; Keijzer, E.; Yu, C.; Ehlert, C. Taking stock of built environment stock studies: Progress and prospects. Environ. Sci. Technol. 2019, 53, 8499–8515. [Google Scholar] [CrossRef]
- Gröger, G.; Plümer, L. CityGML–Interoperable semantic 3D city models. ISPRS J. Photogramm. Remote Sens. 2012, 71, 12–33. [Google Scholar] [CrossRef]
- Biljecki, F.; Ledoux, H.; Stoter, J. An improved LOD specification for 3D building models. Comput. Environ. Urban Syst. 2016, 59, 25–37. [Google Scholar] [CrossRef] [Green Version]
- Shen, C.H.; Huang, S.S.; Fu, H.; Hu, S.M. Adaptive partitioning of urban facades. Acm Trans. Graph. TOG 2011, 30, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Malihi, S.; Valadan Zoej, M.J.; Hahn, M.; Mokhtarzade, M.; Arefi, H. 3D Building Reconstruction Using Dense Photogrammetric Point Cloud. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; pp. 71–74. [Google Scholar] [CrossRef] [Green Version]
- Cao, J.; Metzmacher, H.; O’Donnell, J.; Frisch, J.; Bazjanac, V.; Kobbelt, L.; van Treeck, C. Facade geometry generation from low-resolution aerial photographs for building energy modeling. Build. Environ. 2017, 123, 601–624. [Google Scholar] [CrossRef]
- Huang, H.; Brenner, C.; Sester, M. A generative statistical approach to automatic 3D building roof reconstruction from laser scanning data. ISPRS J. Photogramm. Remote Sens. 2013, 79, 29–43. [Google Scholar] [CrossRef]
- Xiao, J.; Fang, T.; Tan, P.; Zhao, P.; Ofek, E.; Quan, L. Image-based façade modeling. In ACM SIGGRAPH Asia 2008 Papers, Proceedings of the SIGGRAPH Asia’08, Singapore, 10–13 December 2008; ACM: New York, NY, USA, 2008. [Google Scholar] [CrossRef] [Green Version]
- Xiao, J.; Fang, T.; Zhao, P.; Quan, L.; Lhuillier, M. Image-based Street-side City Modeling. ACM Trans. Graph. 2009, 28, 1–12. [Google Scholar] [CrossRef]
- Bai, Y.; Bajaj, J.; Beletic, J.W.; Farris, M.C.; Joshi, A.; Lauxtermann, S.; Petersen, A.; Williams, G. Teledyne imaging sensors: Silicon CMOS imaging technologies for x-ray, UV, visible, and near infrared. In Proceedings of the High Energy, Optical, and Infrared Detectors for Astronomy III, Marseille, France, 23–26 June 2008; SPIE: Bellingham, WA, USA, 2008; Volume 7021, pp. 29–44. [Google Scholar]
- Meyers, G.; Zhu, C.; Mayfield, M.; Tingley, D.D.; Willmott, J.; Coca, D. Designing a vehicle mounted high resolution multi-spectral 3d scanner: Concept design. In Proceedings of the 2nd Workshop on Data Acquisition to Analysis, New York, NY, USA, 10 November 2019; pp. 16–21. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. 2018. Available online: http://xxx.lanl.gov/abs/1802.02611 (accessed on 26 July 2022).
- Mora, T.D.; Teso, L.; Carnieletto, L.; Zarrella, A.; Romagnoni, P. Comparative Analysis between Dynamic and Quasi-Steady-State Methods at an Urban Scale on a Social-Housing District in Venice. Energies 2021, 14, 5164. [Google Scholar] [CrossRef]
- Lingfors, D.; Bright, J.M.; Engerer, N.A.; Ahlberg, J.; Killinger, S.; Widén, J. Comparing the capability of low- and high-resolution LiDAR data with application to solar resource assessment, roof type classification and shading analysis. Appl. Energy 2017, 205, 1216–1230. [Google Scholar] [CrossRef]
- Gooding, J.; Crook, R.; Tomlin, A.S. Modelling of roof geometries from low-resolution LiDAR data for city-scale solar energy applications using a neighbouring buildings method. Appl. Energy 2015, 148, 93–104. [Google Scholar] [CrossRef] [Green Version]
- Arthur, D.; Vassilvitskii, S. K-means++: The advantages of careful seeding. In Proceedings of the Annual ACM-SIAM Symposium on Discrete Algorithms, SODA ’07, New Orleans, LA, USA, 7–9 January 2007; pp. 1027–1035. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining, Munich, Germany, 2 August 1996; pp. 226–231. [Google Scholar]
- Girardeau-Montaut, D. CloudCompare. In Proceedings of the France: EDF R&D Telecom ParisTech, Stuttgart, Germany, 4–5 December 2019. [Google Scholar]
- Loga, T.; Stein, B.; Diefenbach, N. TABULA building typologies in 20 European countries—Making energy-related features of residential building stocks comparable. Energy Build. 2016, 132, 4–12. [Google Scholar] [CrossRef]
- Blender. Blender-a 3D Modelling and Rendering Package; Stichting Blender Foundation: Amsterdam, The Netherlands, 2020; Available online: http://www.blender.org (accessed on 26 July 2022).
- Monga, O.; Deriche, R.; Malandain, G.; Cocquerez, J.P. Recursive filtering and edge tracking: Two primary tools for 3D edge detection. Image Vis. Comput. 1991, 9, 203–214. [Google Scholar] [CrossRef]
- Yagüe-Fabra, J.A.; Ontiveros, S.; Jiménez, R.; Chitchian, S.; Tosello, G.; Carmignato, S. A 3D edge detection technique for surface extraction in computed tomography for dimensional metrology applications. CIRP Ann. 2013, 62, 531–534. [Google Scholar] [CrossRef]
- Spotr. Inspect Millions of Buildings in Seconds. 2022. Available online: https://www.spotr.ai/ (accessed on 26 July 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Building Depth | Total Roof Area | Total Wall Area | Window-to-Wall-Ratio |
|---|---|---|---|---|
| Formula |
| Type | Source | (m) | (m) | Depth (m) | (Degree) | WWR % | |||
|---|---|---|---|---|---|---|---|---|---|
| No. | |||||||||
| 0 Semi-detached | Automatic | 4.80 | 9.65 | 6.16 | 39.62 | 77.18 | 151.78 | 23.18% | |
| Manual | 4.30 | 9.65 | 6.12 | 36.77 | 67.69 | 126.21 | 20.87% | ||
| Difference% | 11.58% | 0% | 0.65% | 7.75% | 14.02% | 11.86% | 11.10% | ||
| 1 Semi-detached | Automatic | 4.61 | 12.68 | 5.33 | 34.48 | 81.91 | 166.05 | 45.32% | |
| Manual | 4.20 | 13.44 | 5.80 | 33.98 | 85.59 | 157.25 | 22.85% | ||
| Difference% | 9.76% | −5.66% | 0.95% | 1.47% | −4.29% | 5.60% | 98.37% | ||
| 2 Semi-detached | Automatic | 9.85 | 23.98 | None | - | - | 236.20 | 15.54% | |
| Manual | 9.03 | 24.48 | - | - | - | 221.10 | 19.28% | ||
| Difference% | −9.06% | 2.04% | - | - | - | −6.83% | 19.42% | ||
| 3 Detached | Automatic | 6.49 | 9.59 | 2.42 | 53.03 | 38.55 | 155.89 | 15.44% | |
| Manual | 5.36 | 9.10 | 2.61 | 58.55 | 39.99 | 125.55 | 19.88% | ||
| Difference% | 21.08% | 5.34% | 7.21% | 9.43% | 3.60% | 24.16% | -22.33% | ||
| 4 Terraced | Automatic | 8.21 | 28.98 | None | - | - | 237.93 | 36.75% | |
| Manual | 7.32 | 32.00 | - | - | - | 234.24 | 21.80% | ||
| Difference% | 12.16% | −9.44% | - | - | - | 1.57% | 68.56% | ||
| 5 Terraced | Automatic | 10.81 | 94.77 | - | - | - | 1024.46 | 28.28% | |
| Manual | 10.08 | 96.76 | - | - | - | 975.34 | 17.38% | ||
| Difference% | 7.24% | −2.06% | - | - | - | 5.04% | 62.72% | ||
| 6 Terraced | Automatic | 11.37 | 49.29 | - | - | - | 560.43 | 15.96% | |
| Manual | 8.72 | 57.20 | - | - | - | 498.78 | 20.16% | ||
| Difference% | 30.39% | 13.83% | - | - | - | 12.36% | 20.82% | ||
| 7 Virtual-detached | Automatic | 4.87 | 9.34 | 6.34 | 34.99 | 72.29 | 152.72 | 17.76% | |
| Manual | 4.64 | 9.25 | 6.72 | 31.58 | 69.28 | 148.20 | 19.09% | ||
| Difference% | 4.96% | 0.97% | −5.65% | 10.80% | 4.35% | 3.05% | 6.97% | ||
| Average | 11.01% | 0.63% | 3.62% | 7.36% | 4.42% | 7.10% | 33.20% | ||
| Standard Deviation | 10.80% | 6.59% | 2.87% | 3.57% | 6.49% | 8.58% | 37.03% | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, M.; Ward, W.O.C.; Arbabi, H.; Densley Tingley, D.; Mayfield, M. Scalable Residential Building Geometry Characterisation Using Vehicle-Mounted Camera System. Energies 2022, 15, 6090. https://doi.org/10.3390/en15166090
Dai M, Ward WOC, Arbabi H, Densley Tingley D, Mayfield M. Scalable Residential Building Geometry Characterisation Using Vehicle-Mounted Camera System. Energies. 2022; 15(16):6090. https://doi.org/10.3390/en15166090
Chicago/Turabian StyleDai, Menglin, Wil O. C. Ward, Hadi Arbabi, Danielle Densley Tingley, and Martin Mayfield. 2022. "Scalable Residential Building Geometry Characterisation Using Vehicle-Mounted Camera System" Energies 15, no. 16: 6090. https://doi.org/10.3390/en15166090
APA StyleDai, M., Ward, W. O. C., Arbabi, H., Densley Tingley, D., & Mayfield, M. (2022). Scalable Residential Building Geometry Characterisation Using Vehicle-Mounted Camera System. Energies, 15(16), 6090. https://doi.org/10.3390/en15166090