
Swiveling Magnetization for Anisotropic Magnets for Variable Flux Spoke-Type Permanent Magnet Motor Applied to Electric Vehicles



Abstract
:1. Introduction
2. Variable Flux PM Motor Topologies and Proposed VFS-PMSM
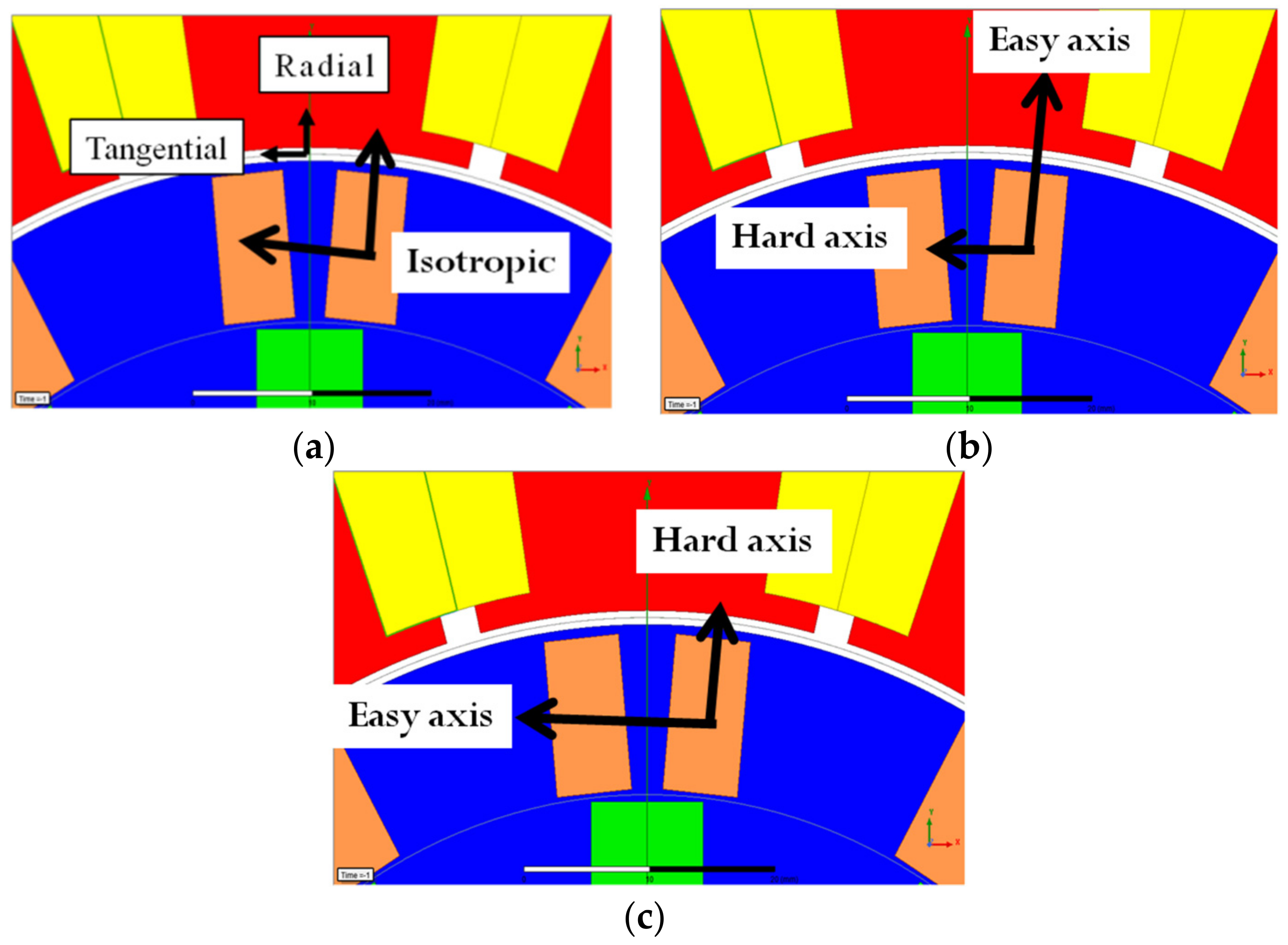
2.1. Torque Generation
2.2. Flux Regulation Ability
2.3. Discussion
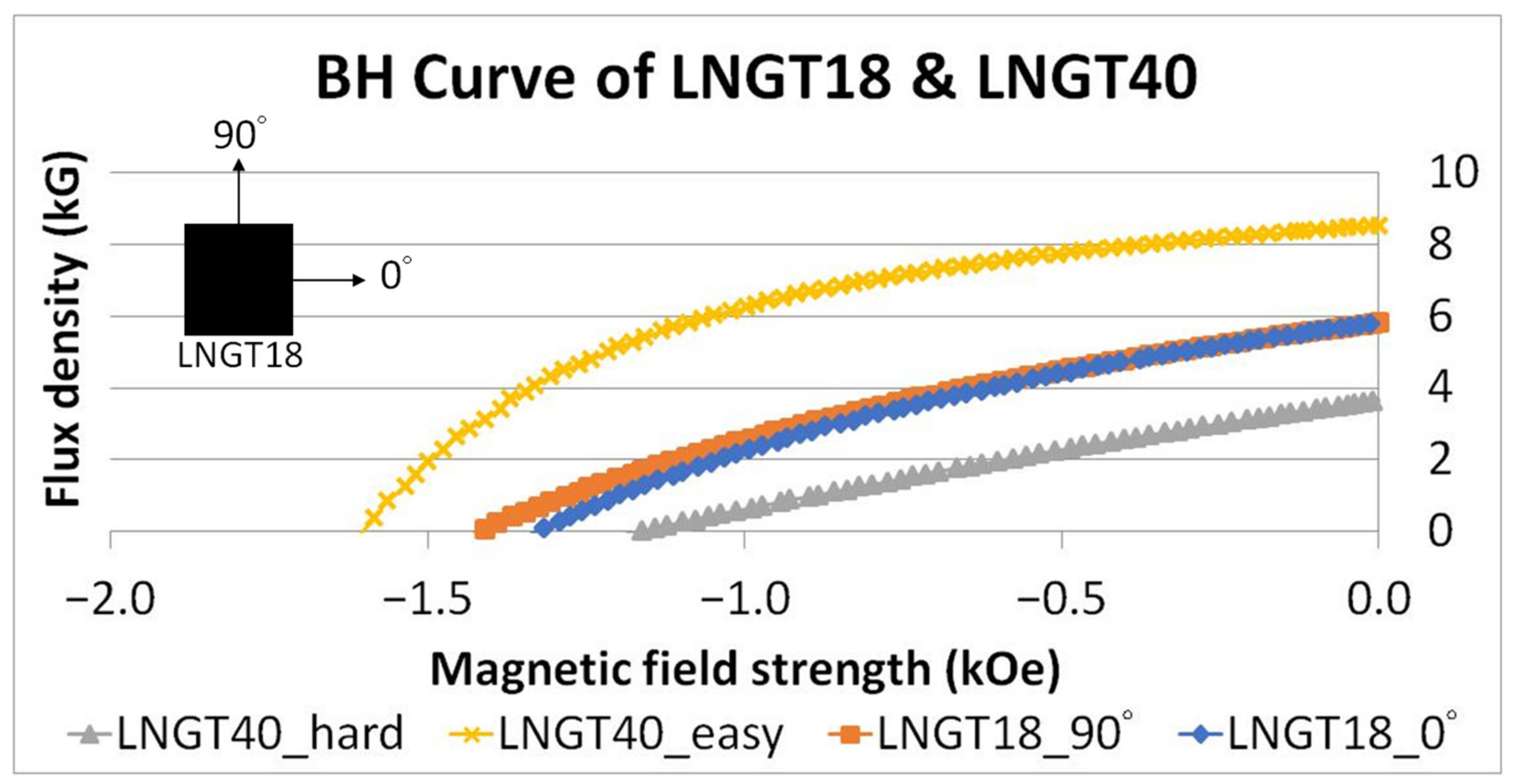
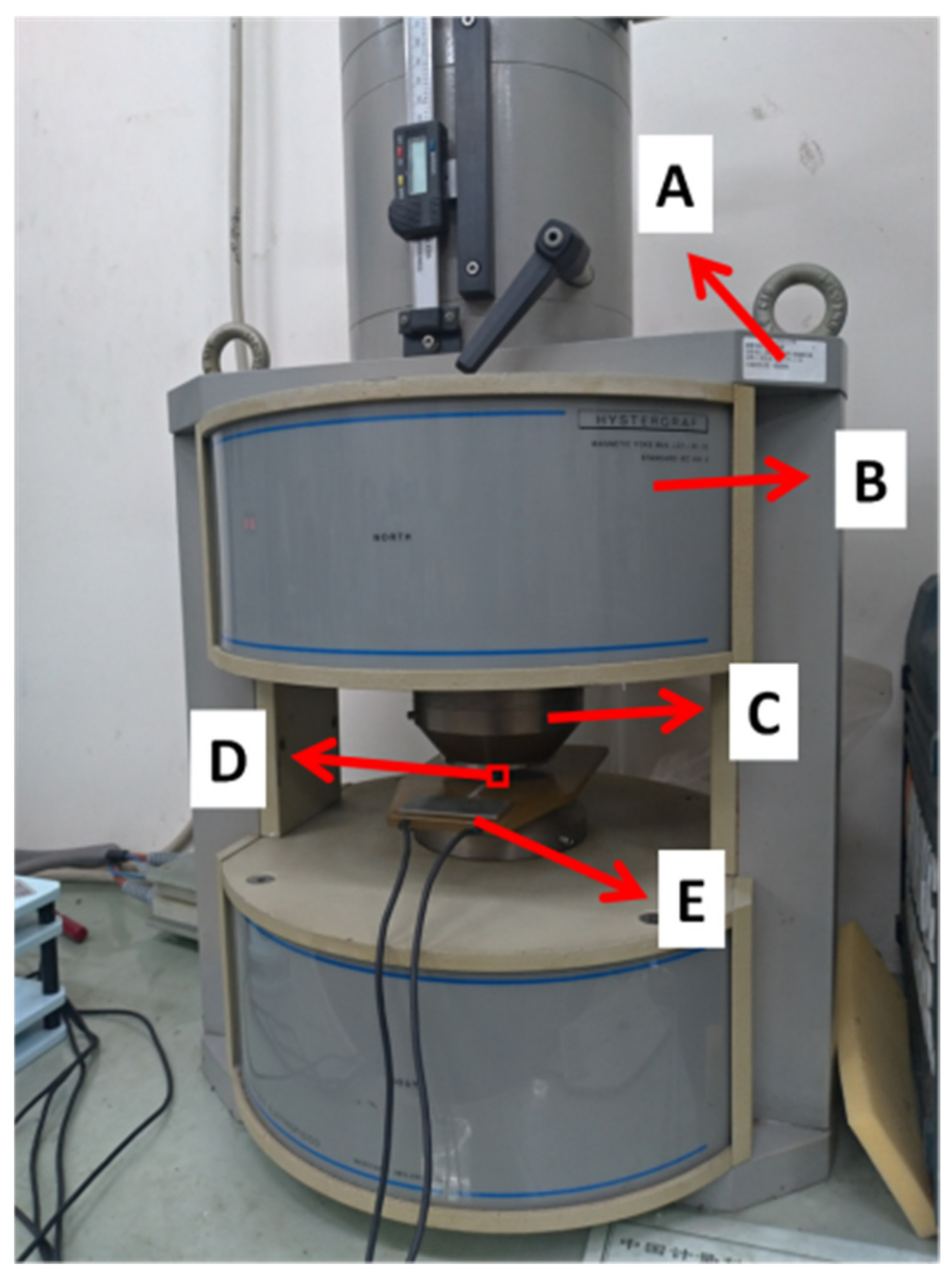
3. Feasibility Verification of Anisotropic AlNiCo Application in VFS-PMSM
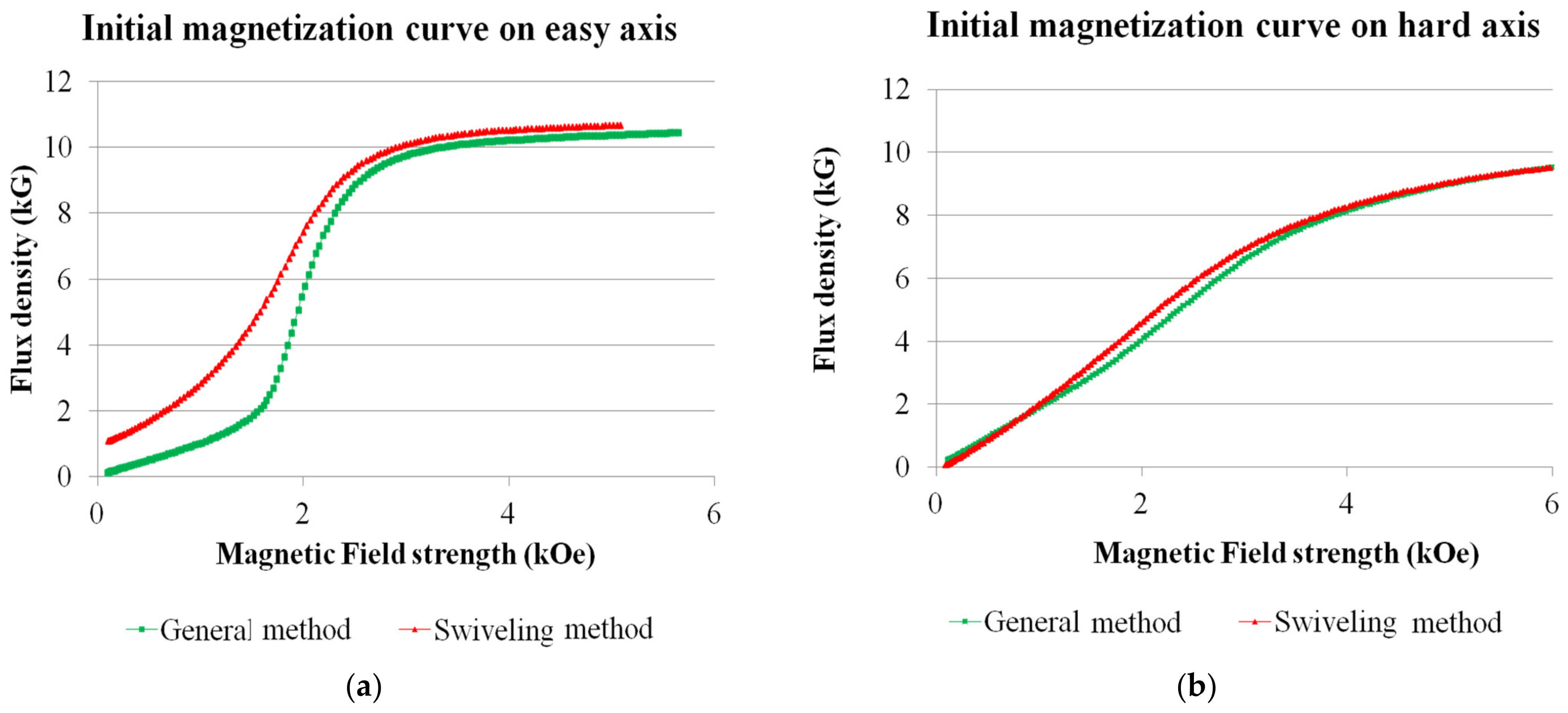
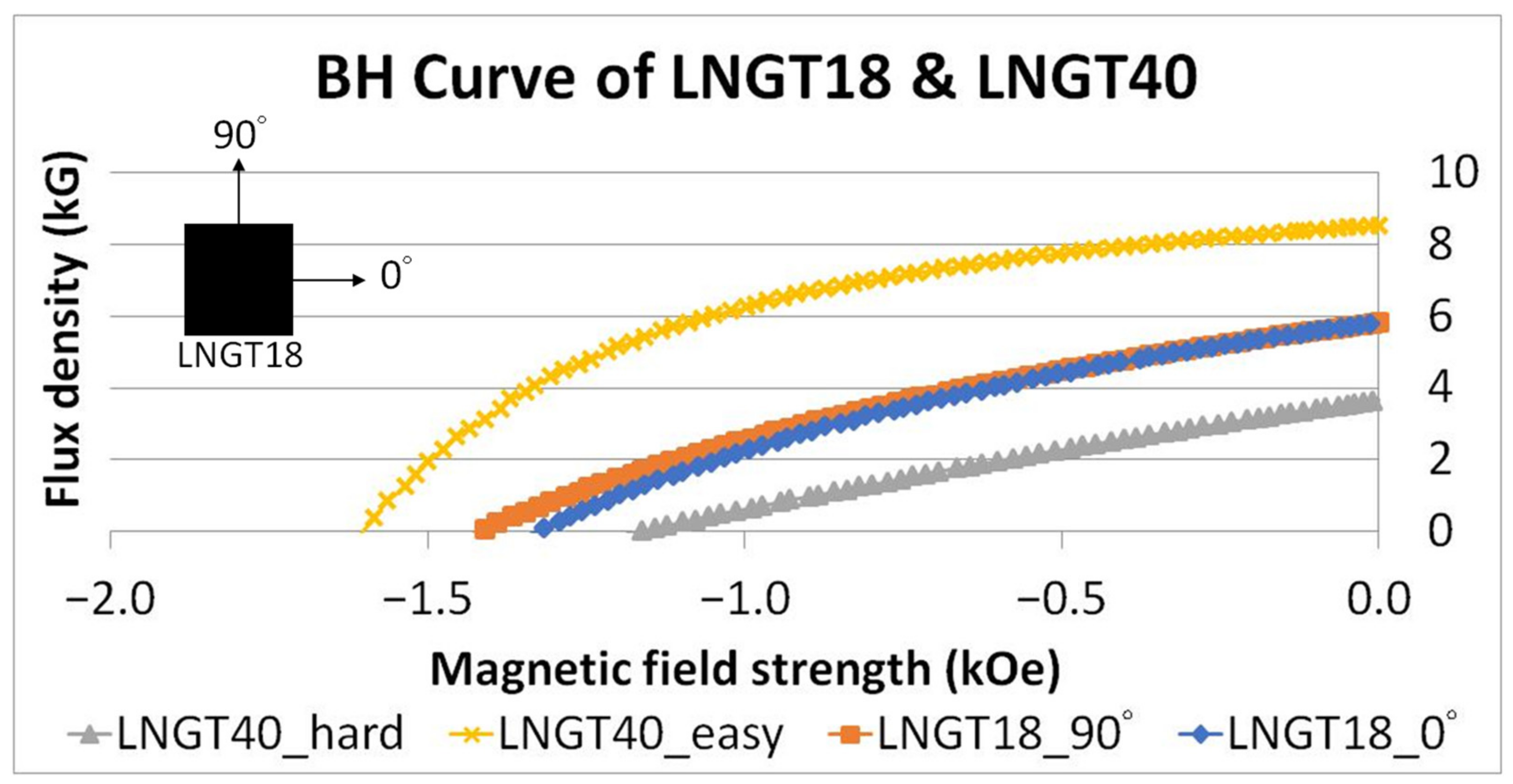
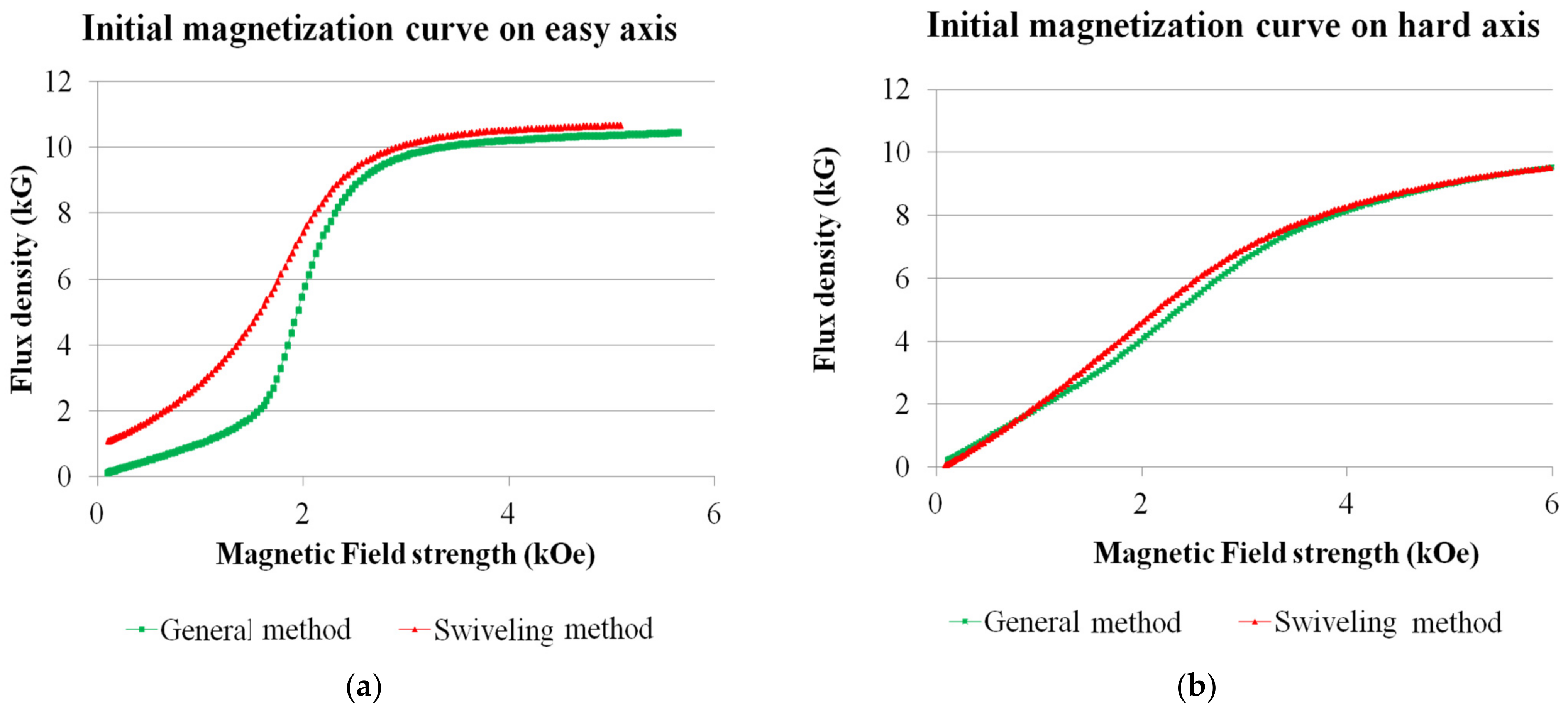
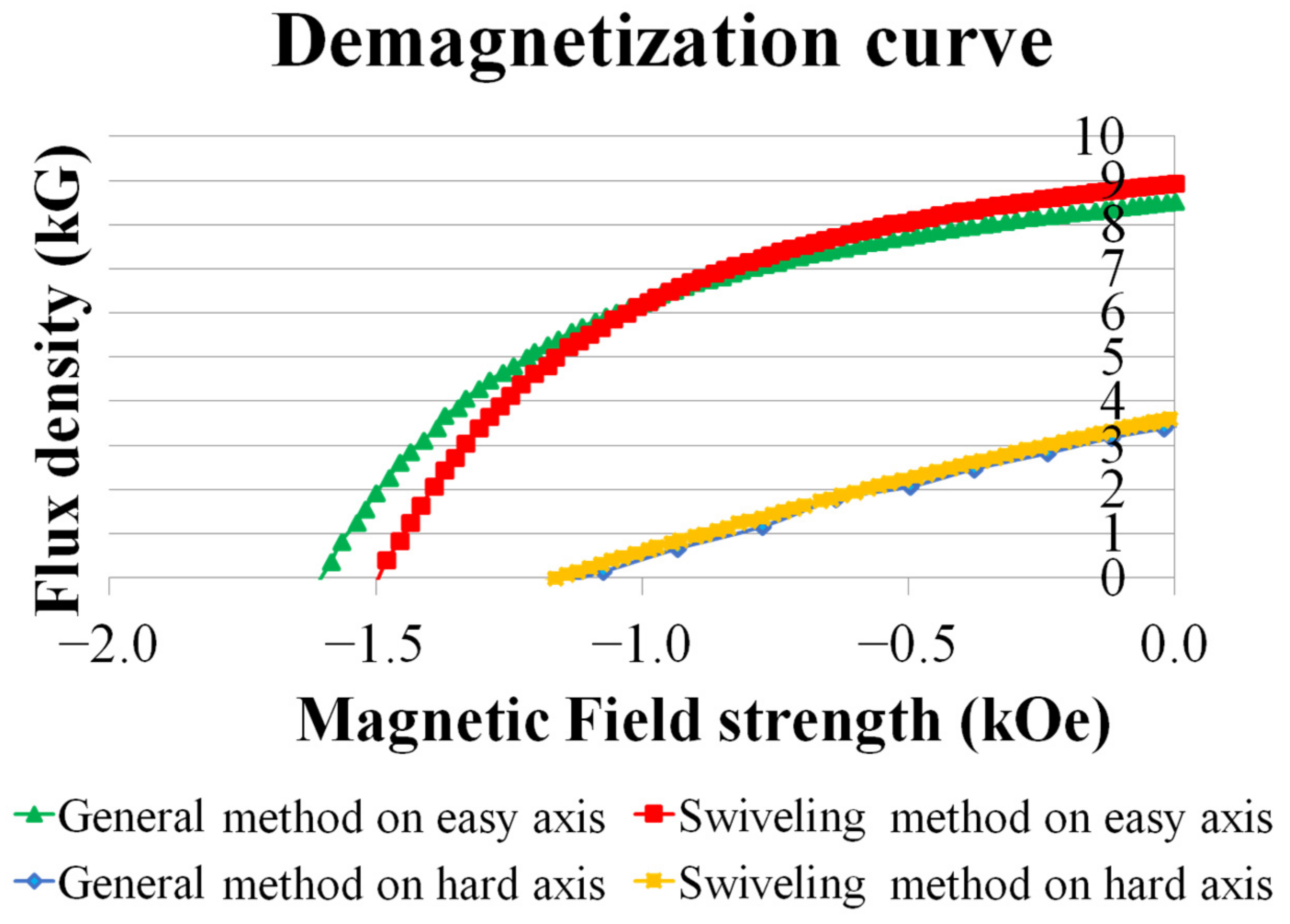
- The initial magnetization curve and demagnetization curve in the easy axis and hard axis when they are originally unmagnetized (general magnetization method);
- The initial magnetization curve and demagnetization curve in the hard axis after the magnet is already magnetized in the easy axis (swiveling magnetization technique);
- The initial magnetization curve and demagnetization curve in the easy axis after the magnet is already magnetized in the hard axis (swiveling magnetization technique).
- (I)
- The unmagnetized magnet is placed in the B-H tracer with its easy axis aligned with the pickup coil. The external magnetizing field is slowly increased until the measurement of the initial magnetization curve in the easy axis is completed (general magnetizing method). Then, the coil current is released, and then a sufficiently large external field opposite to the previous magnetizing direction is applied and gradually reduced until the current in the magnetizing coil drops to zero to complete the measurement of the demagnetization curve in the easy axis (general magnetizing method). Then, these are all repeated for the hard axis of another piece of magnet. Moreover, from all these processes there will be two pieces of anisotropic magnets magnetized in different axes.
- (II)
- The hard axis of the magnet previously magnetized in the easy axis is then placed aligning with the magnetizing and pickup coils. The magnetizing field is gradually increased until saturation to complete the measurement of the initial magnetization curve for the swiveling magnetization technique (turning from the easy axis to the hard axis). Then, after the magnetizing current is released, an opposite magnetizing field being sufficiently large is applied and gradually reduced until the current drops to zero to complete the demagnetization curve measurement for the swiveling magnetization technique.
- (III)
- Adopting the same process as described in Step 2 but using another piece of magnet previously magnetized in the hard axis, the initial magnetization curve and demagnetization curve with swiveling magnetization turning from the hard axis to the easy axis can be obtained.
4. Performance Comparison of Anisotropic VFS-PMSM with Different Rotor Configurations
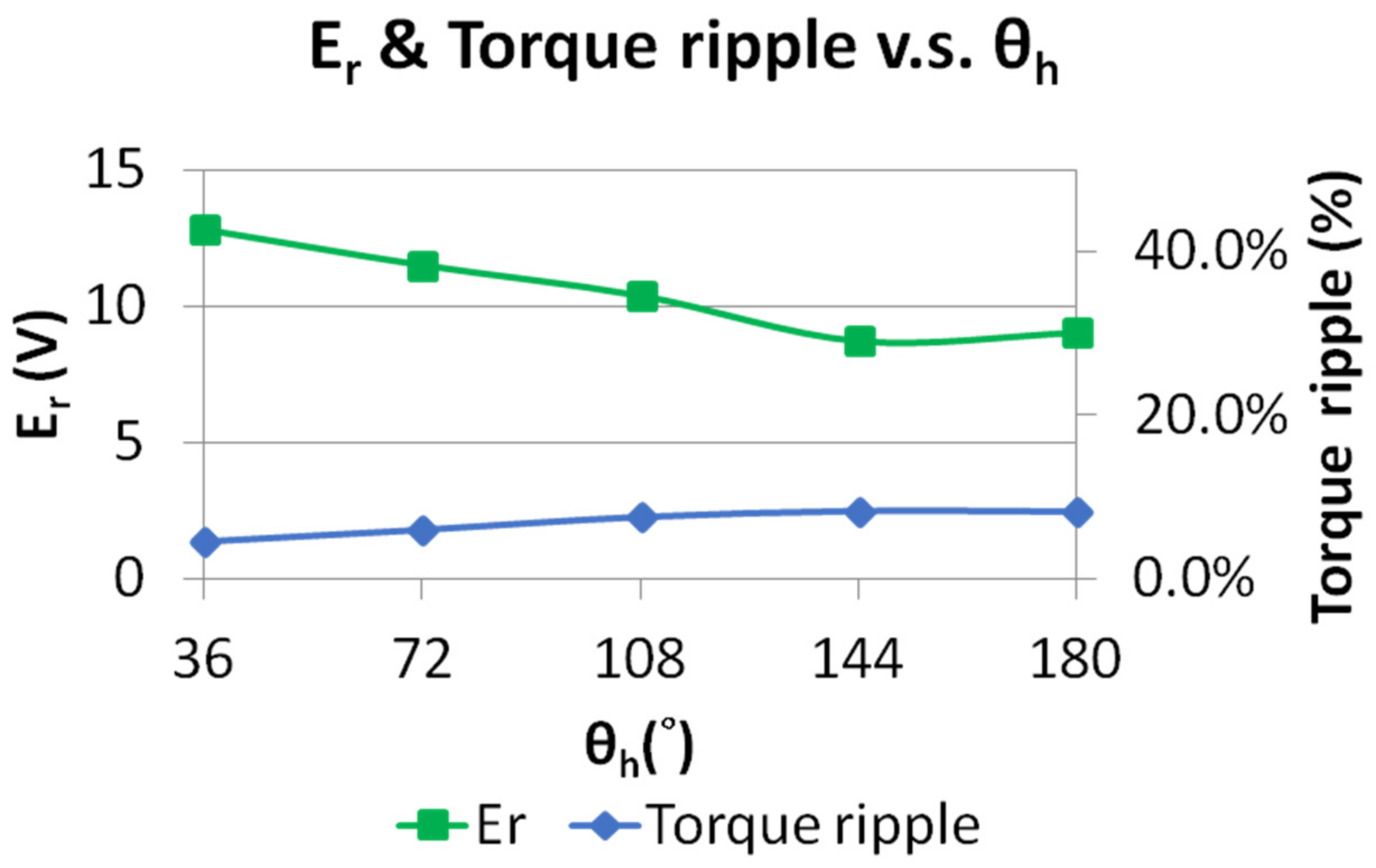
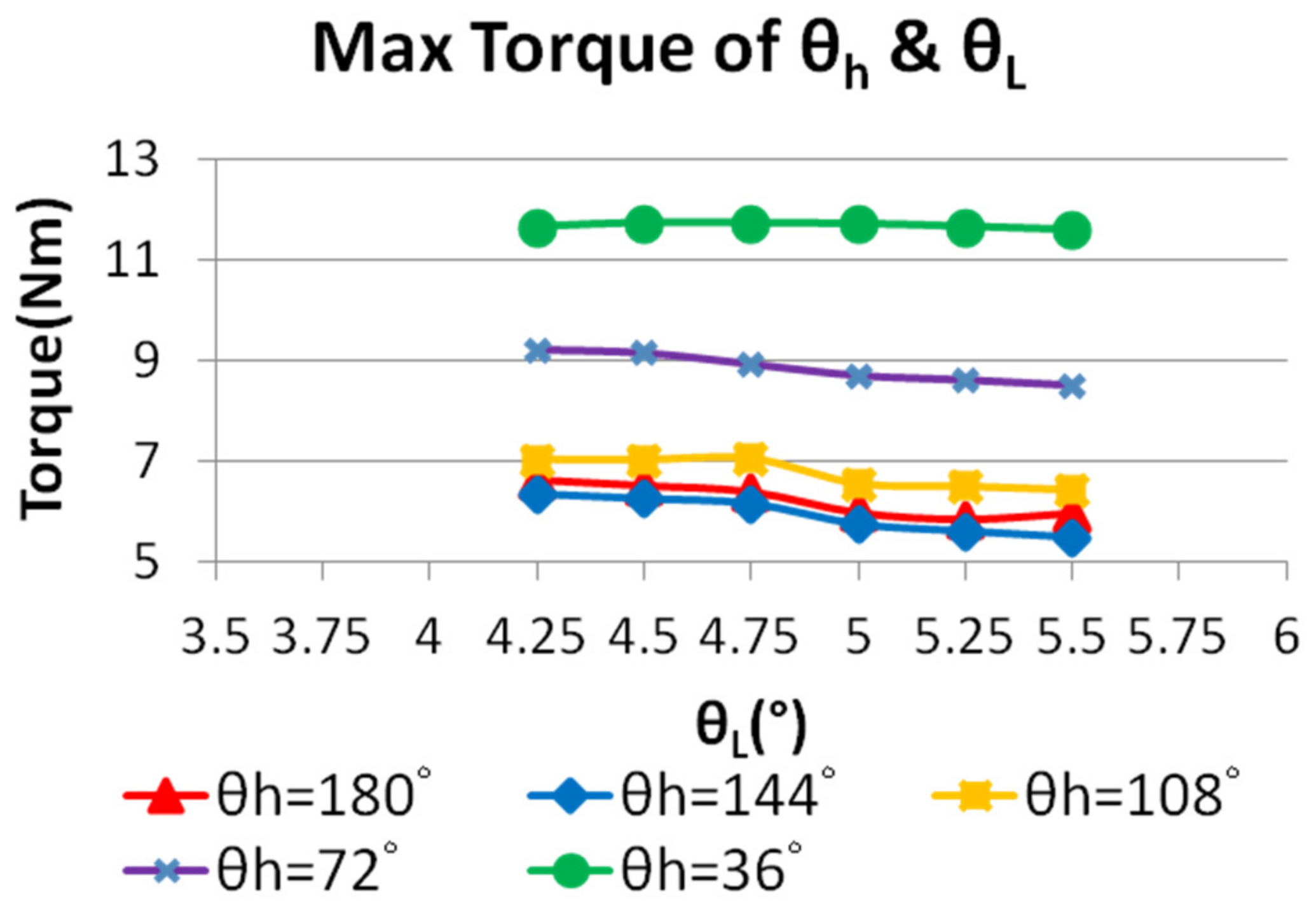
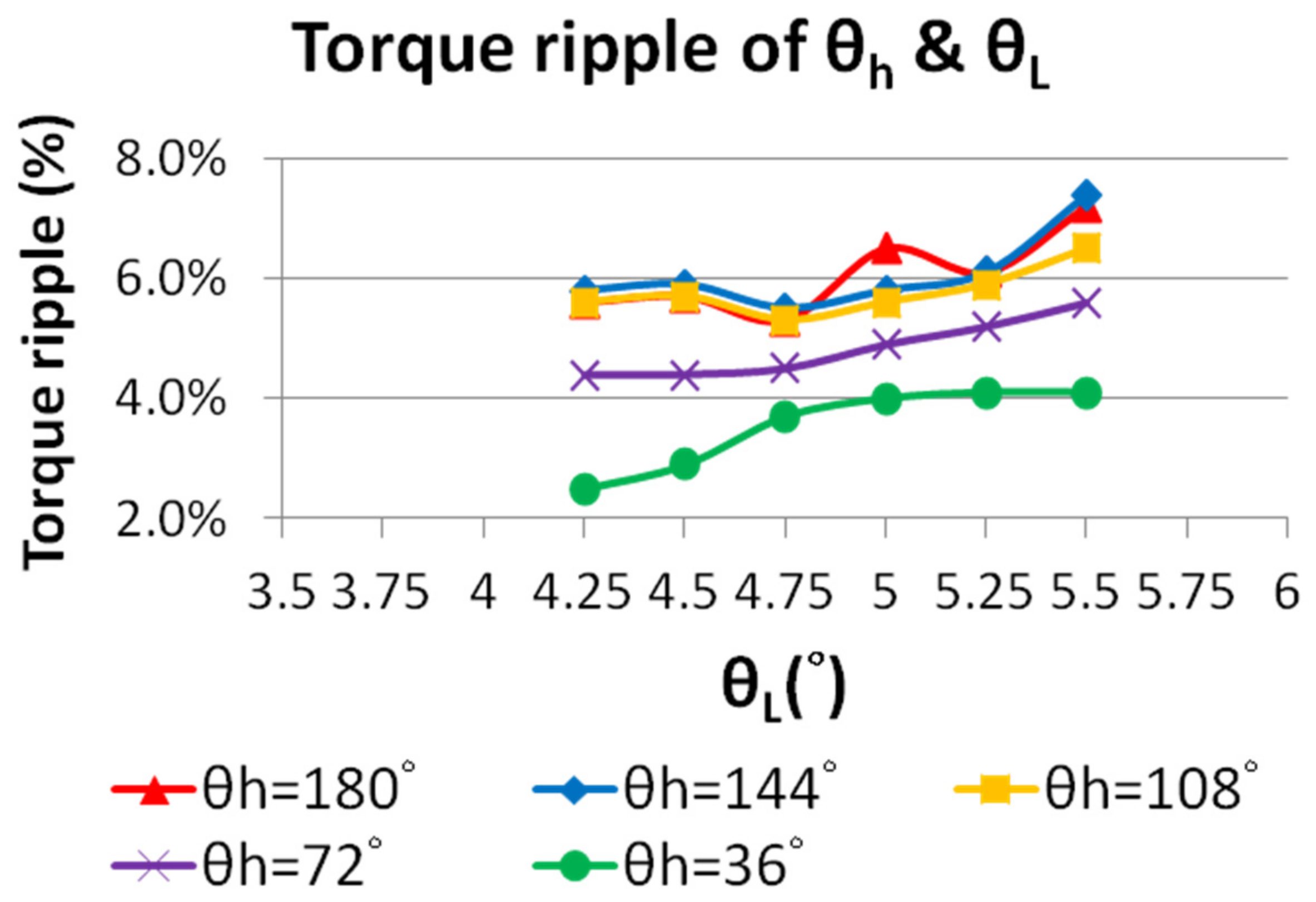
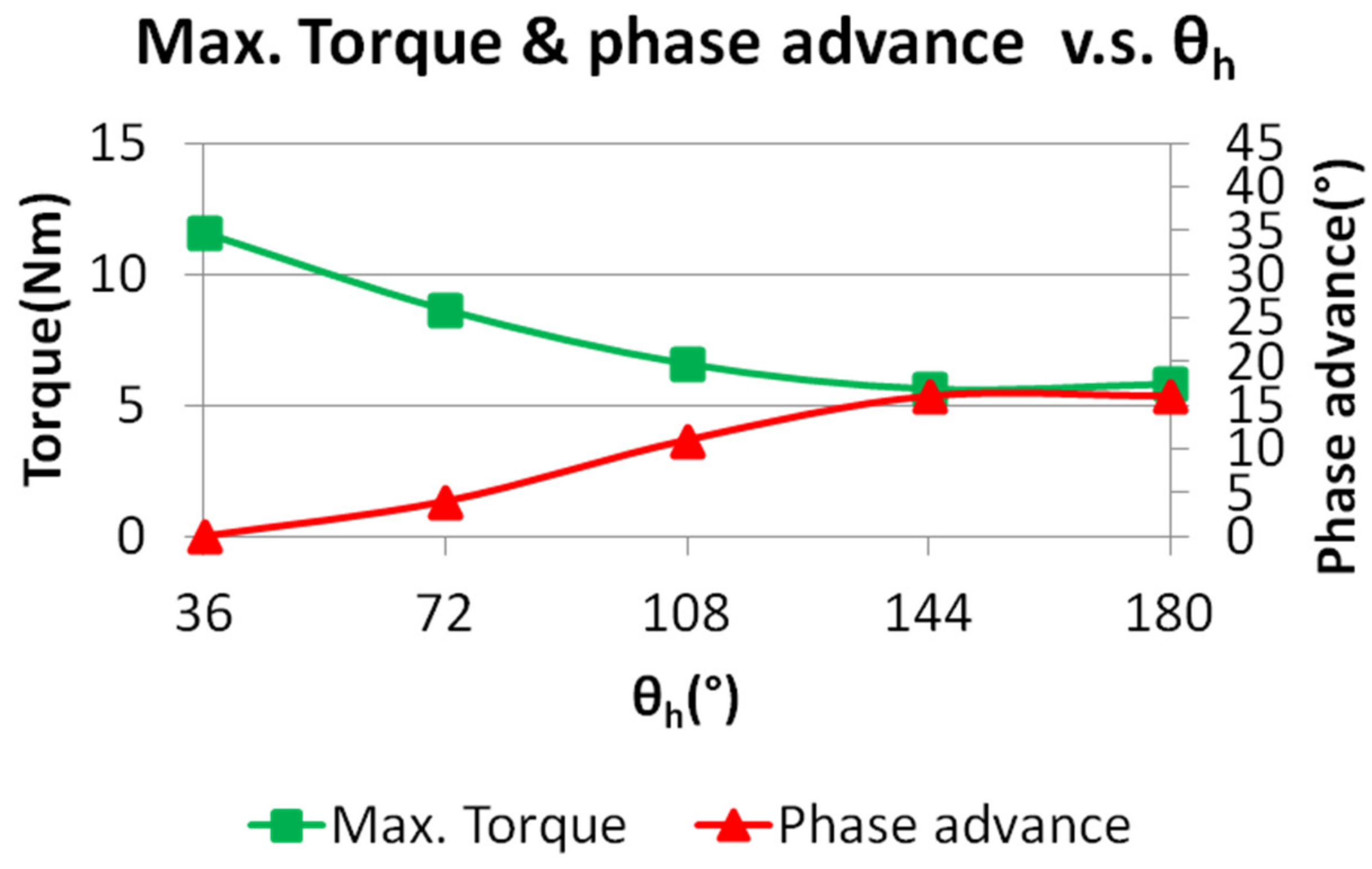
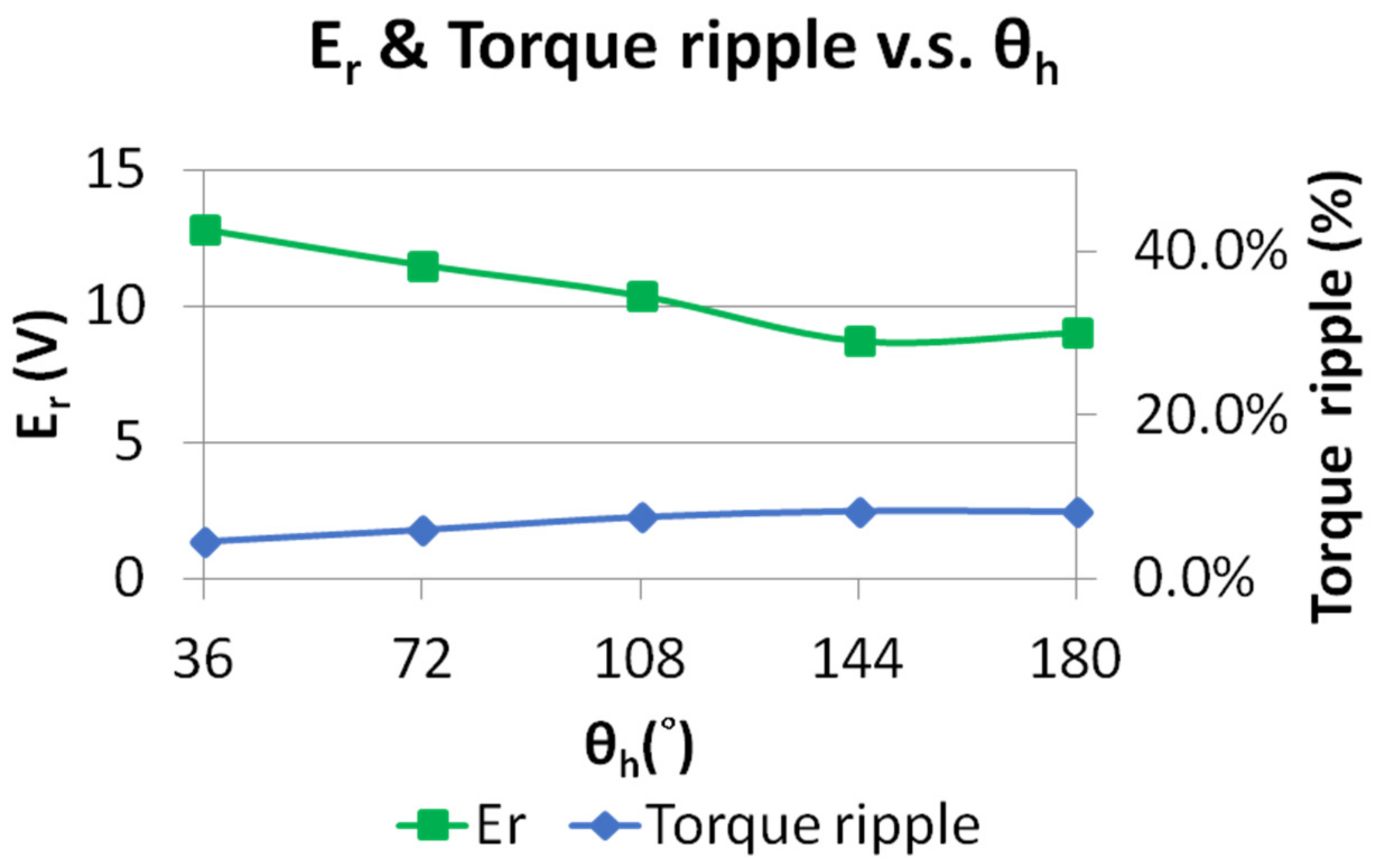
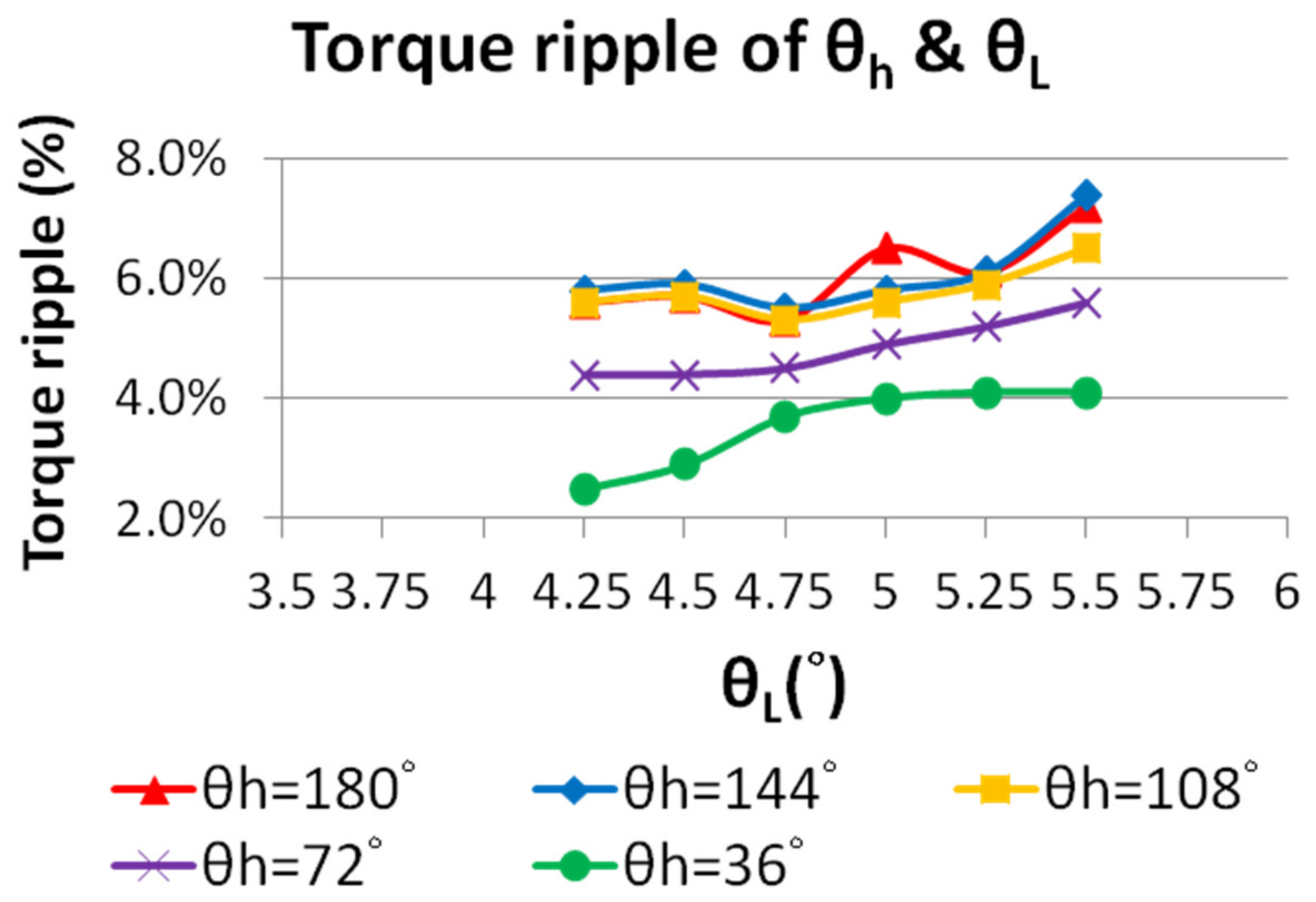
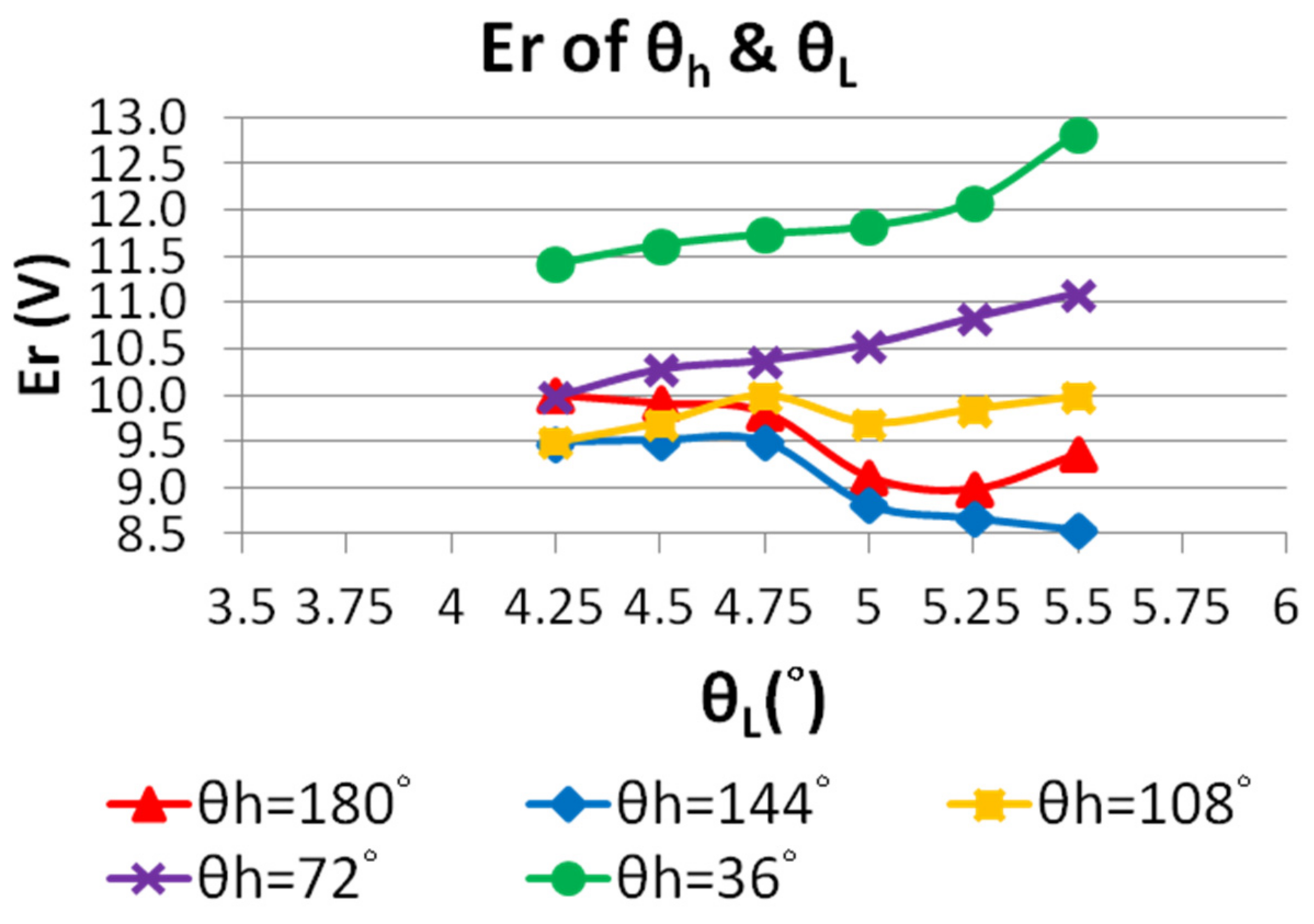
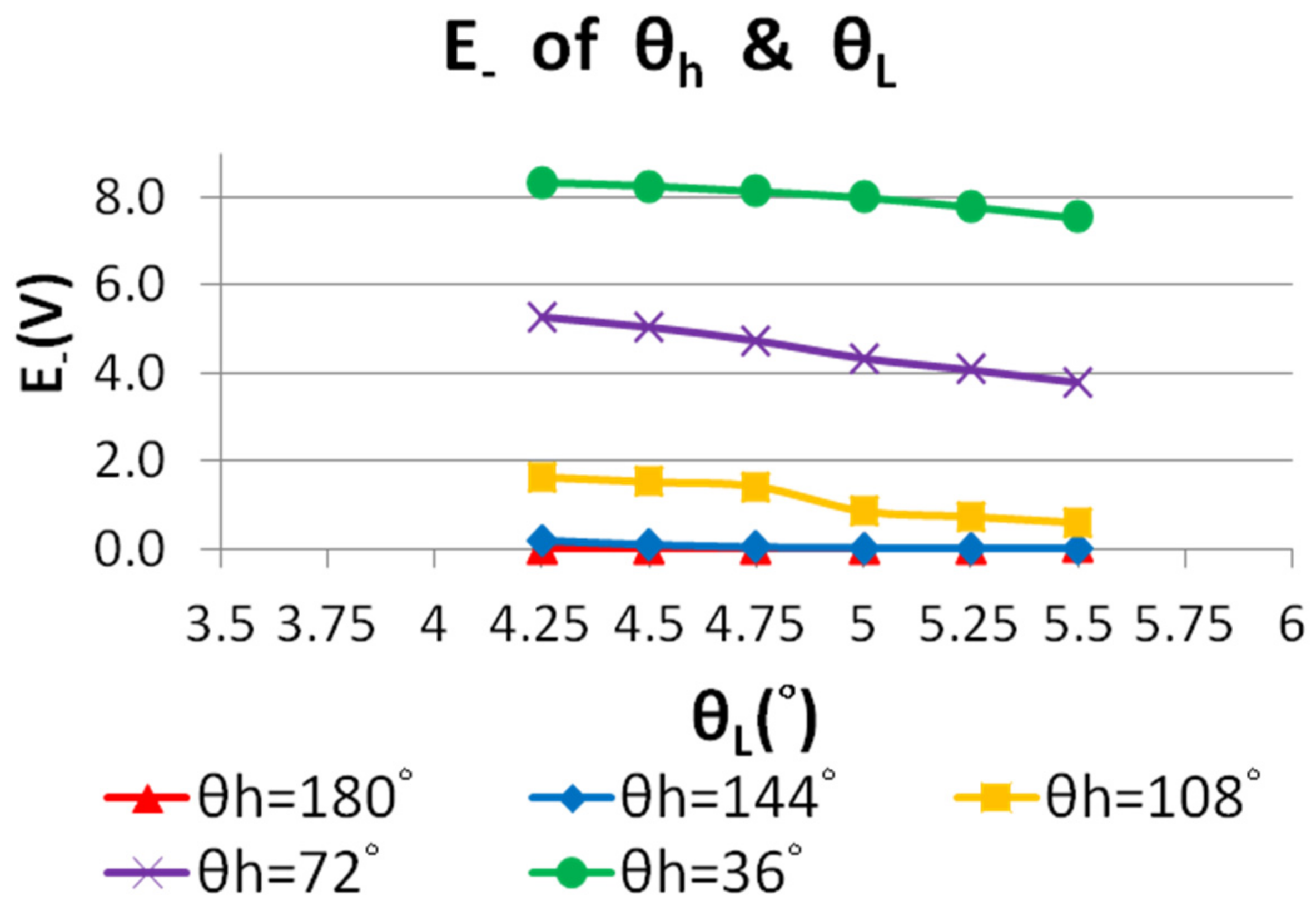
4.1. Scenario I
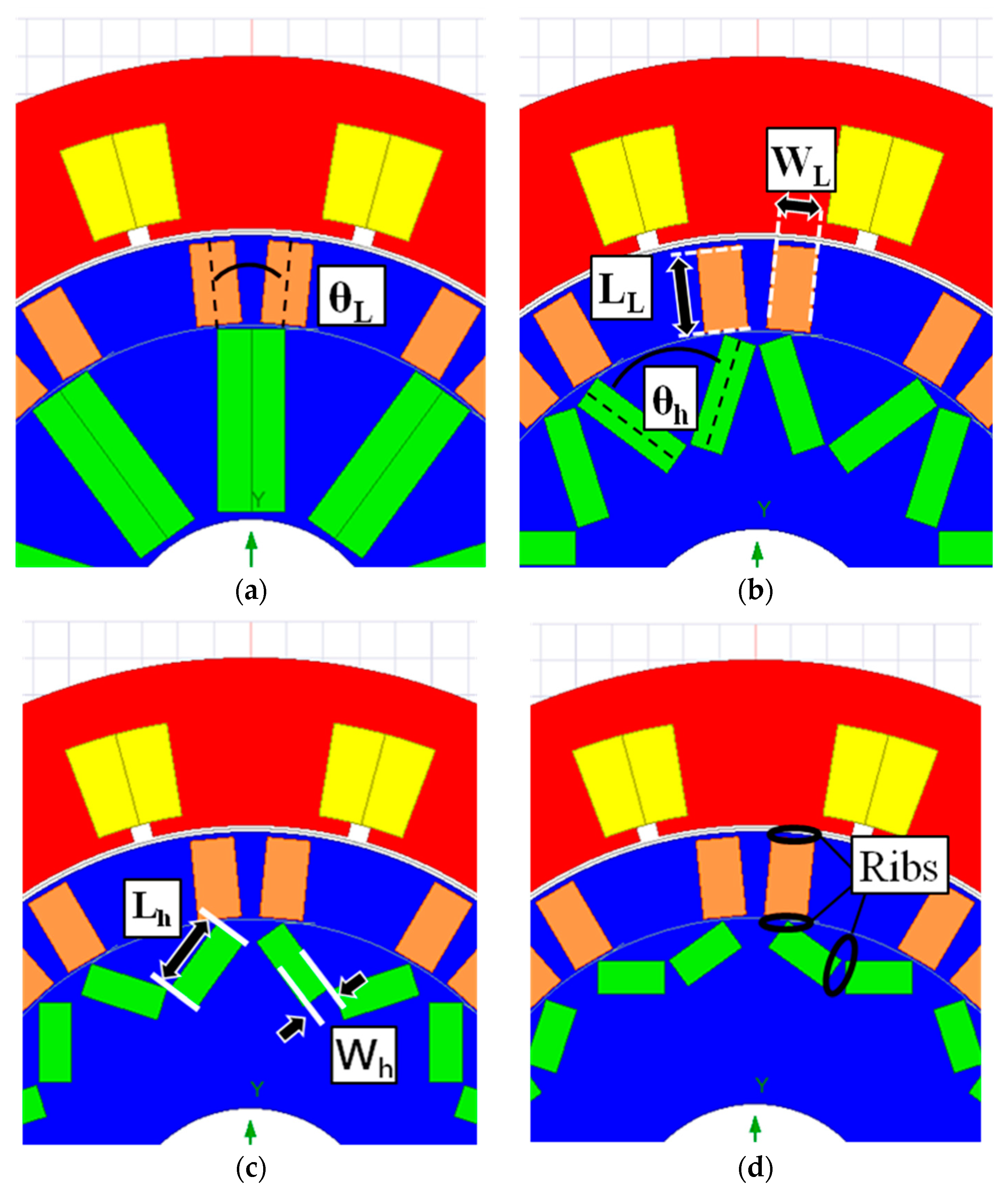
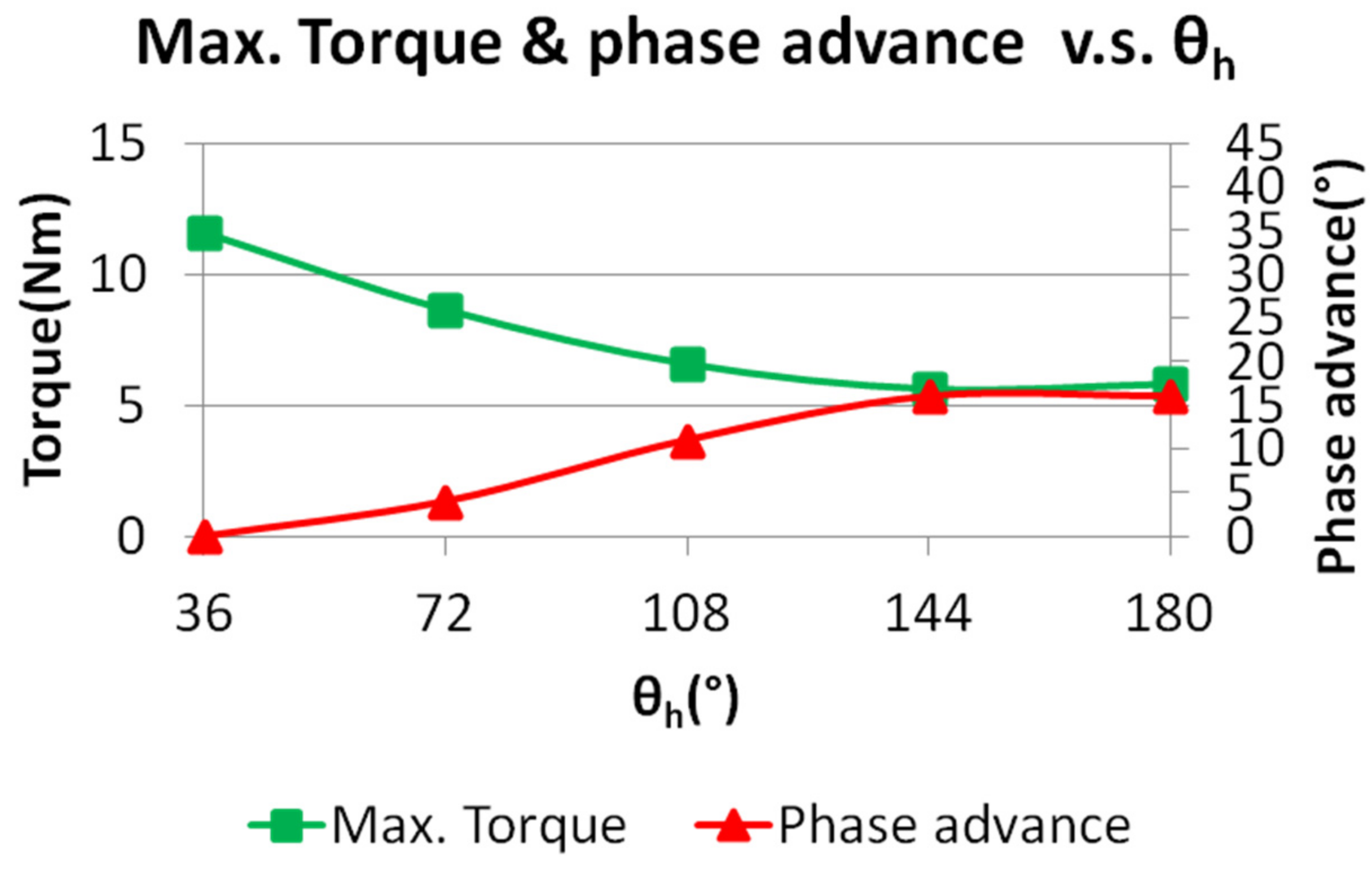
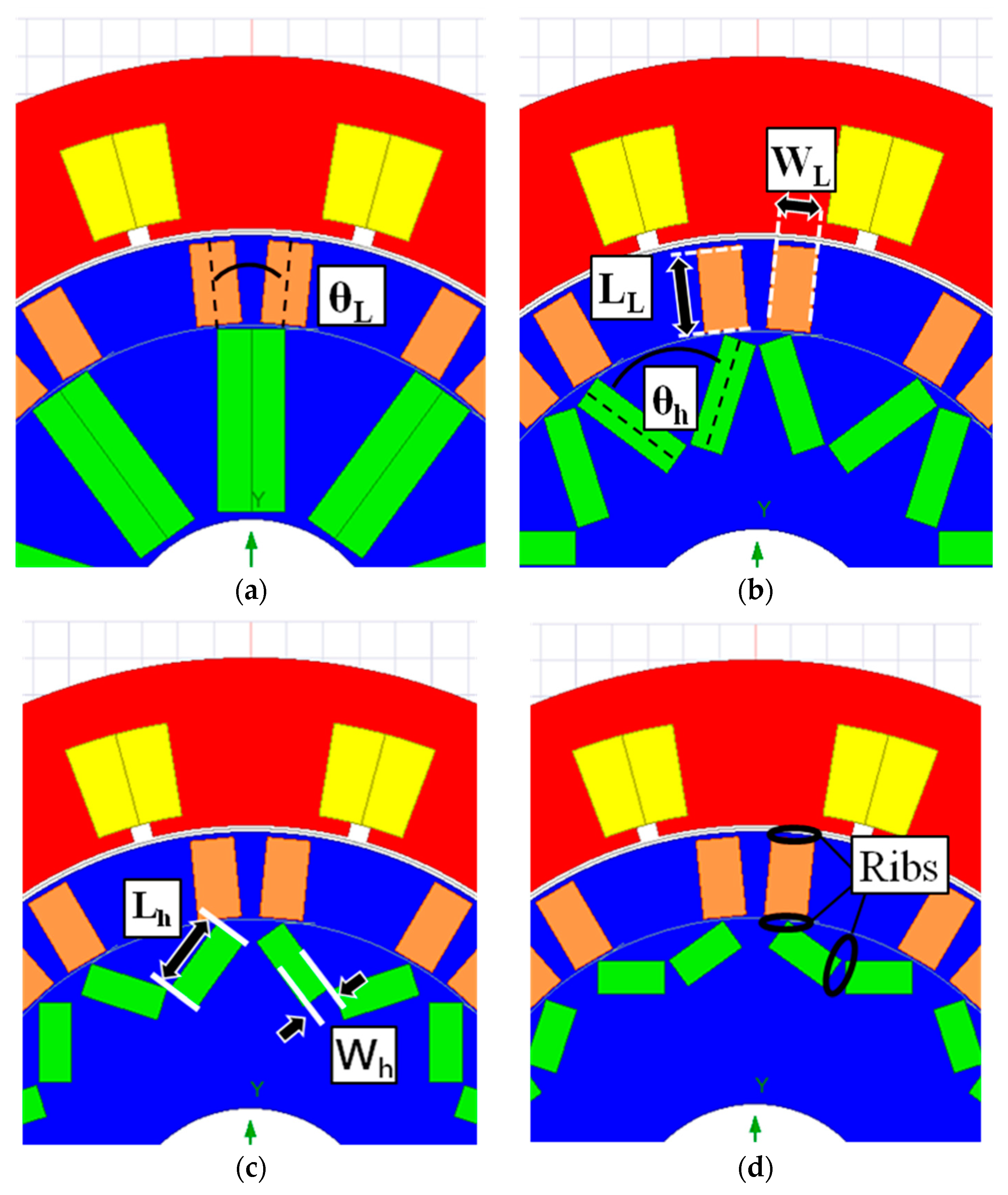
- The size and position of the LCF magnet remain the same;
- The thickness of the HCF magnet Wh, is fixed;
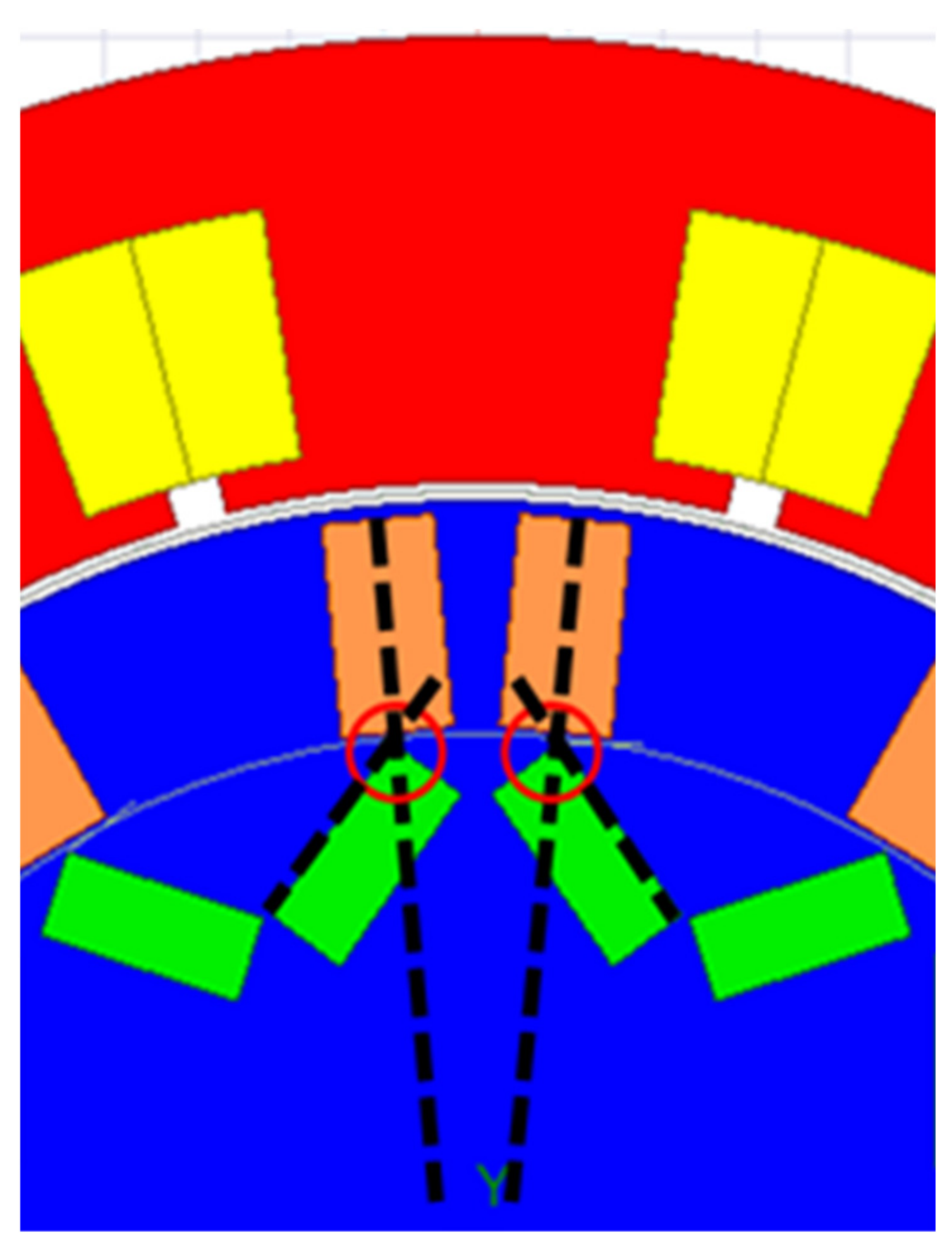
- The angle θh between the two HCF magnets for one pole is set as a variable.
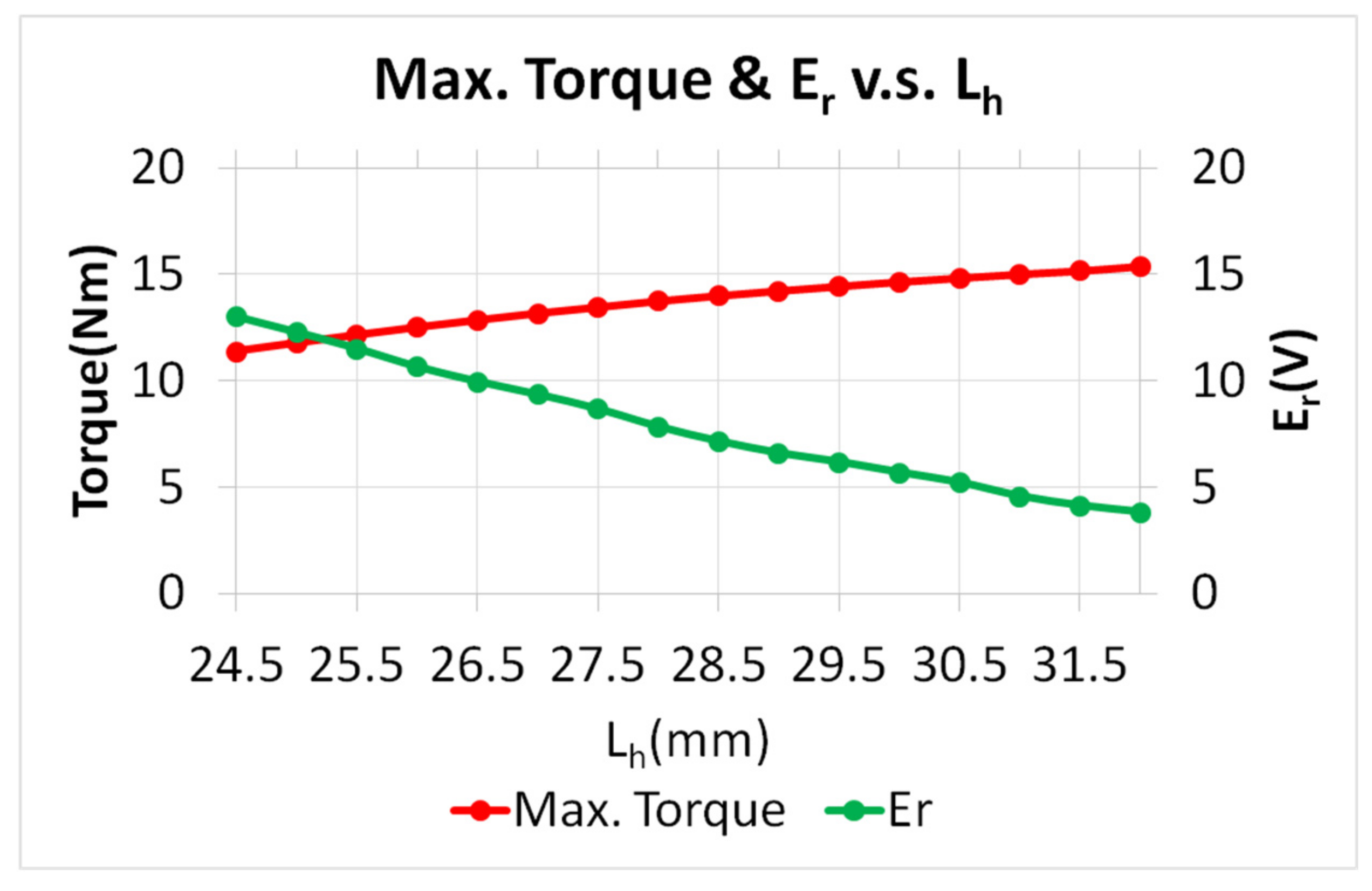
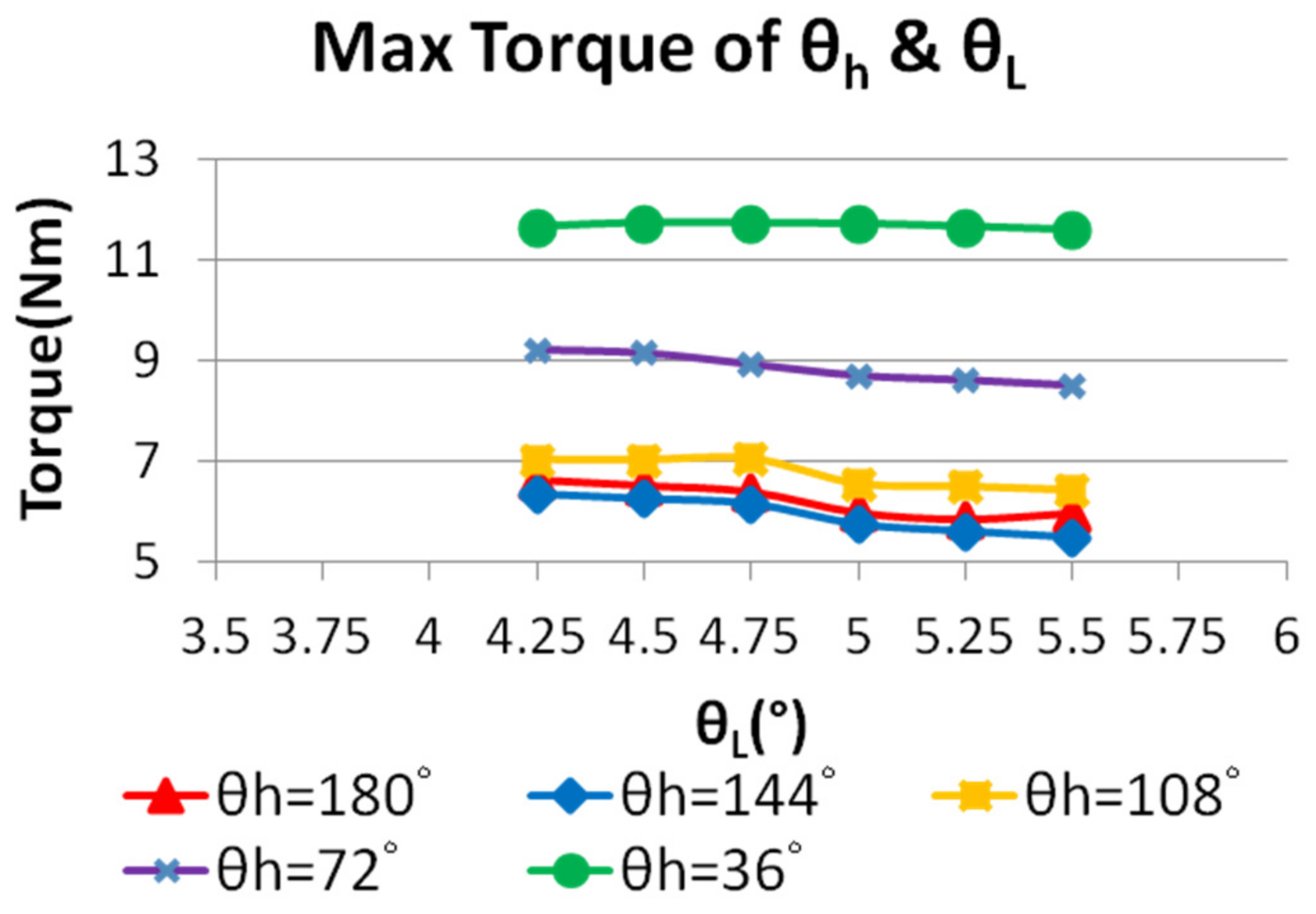
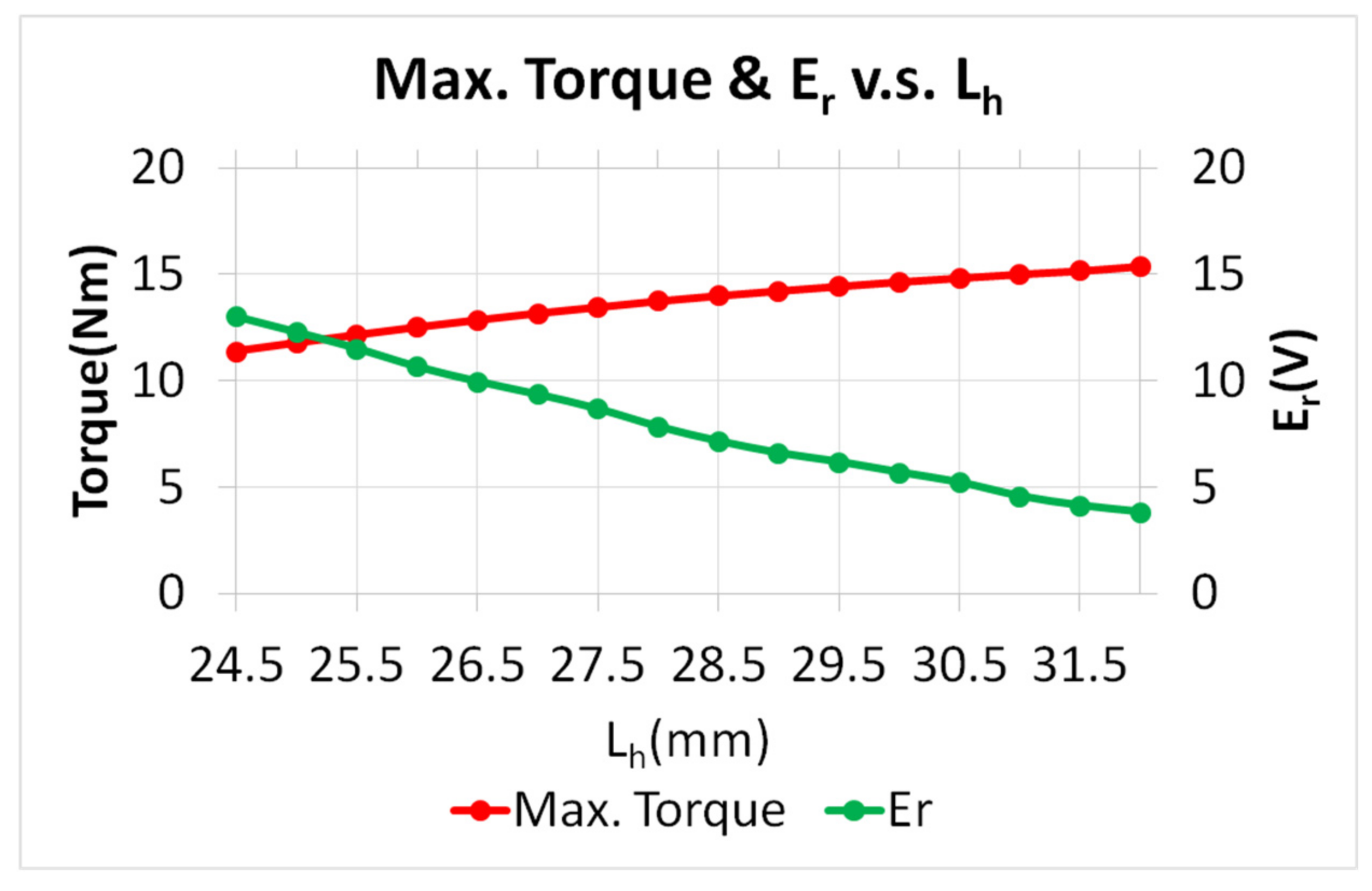
4.2. Scenario II
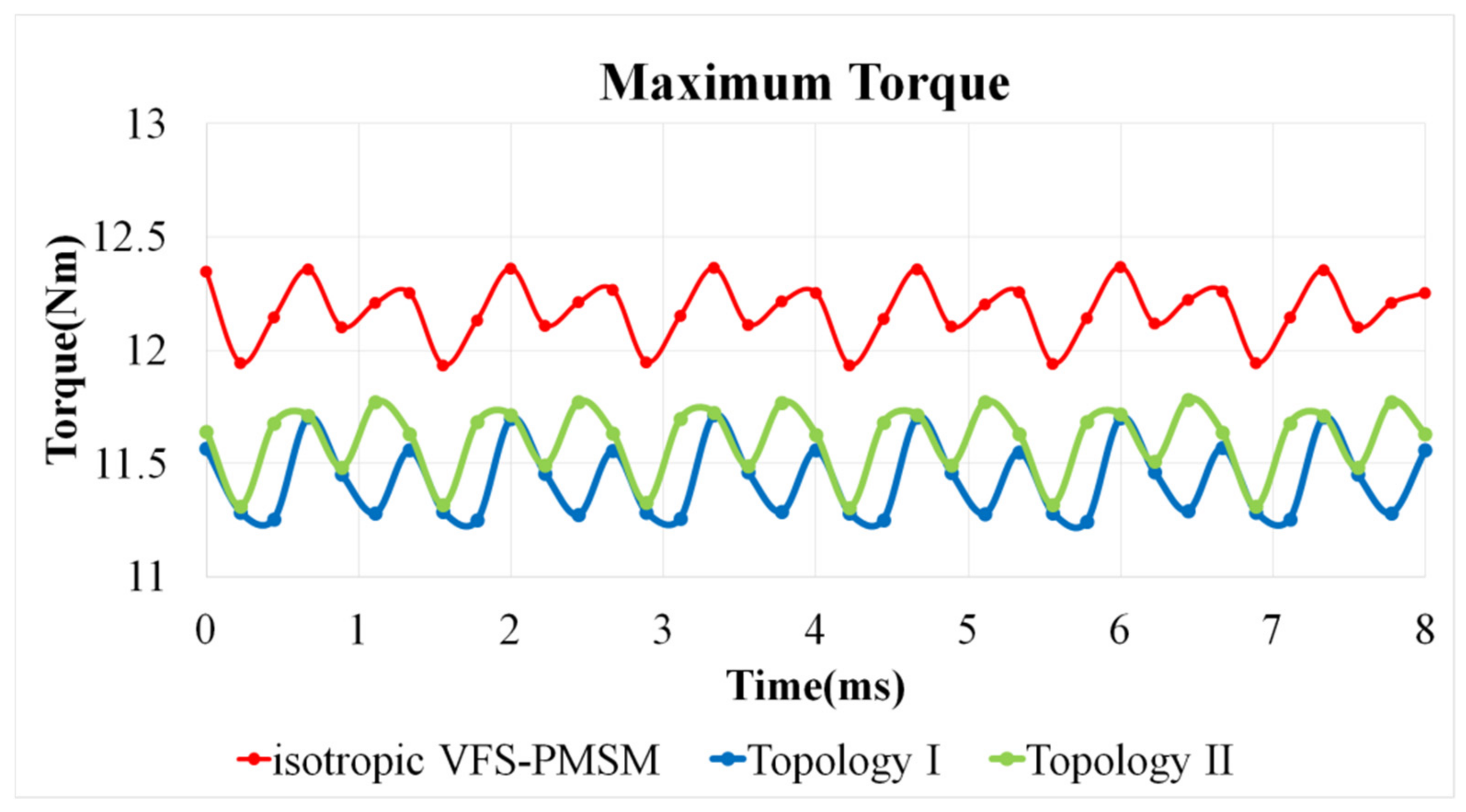
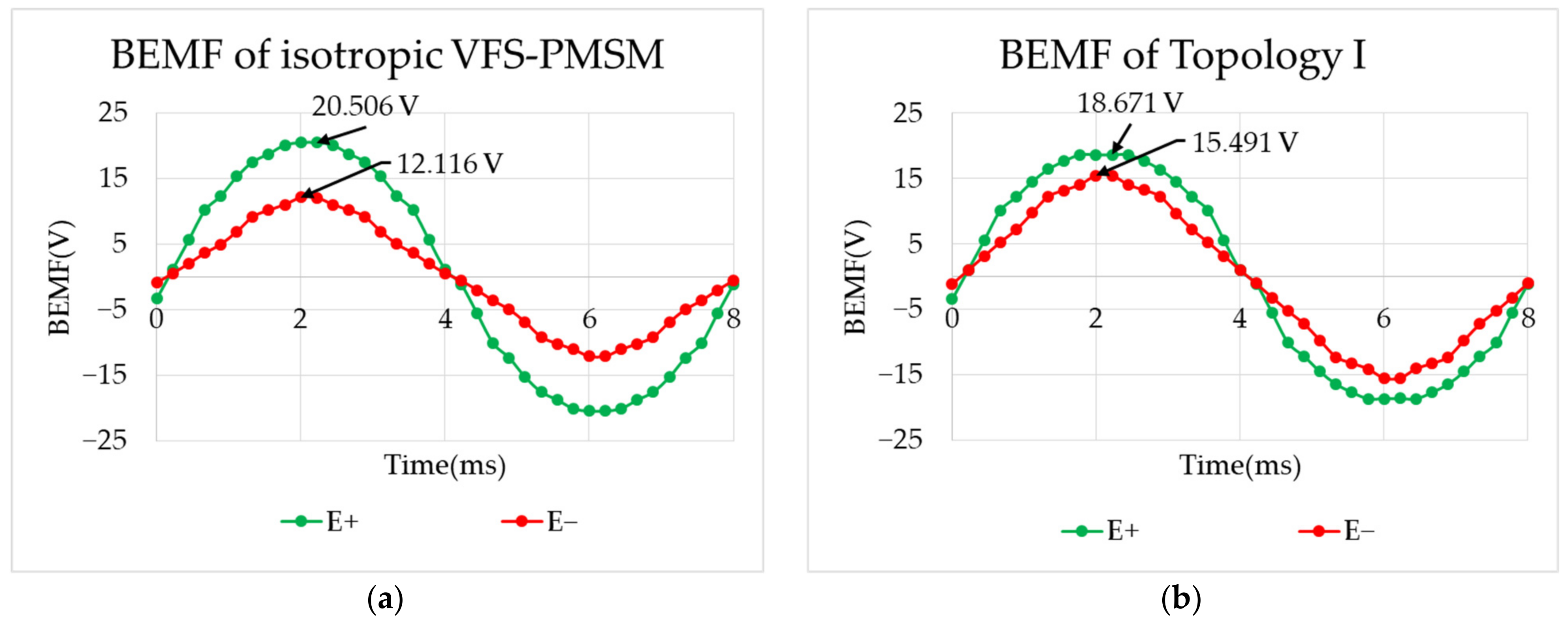
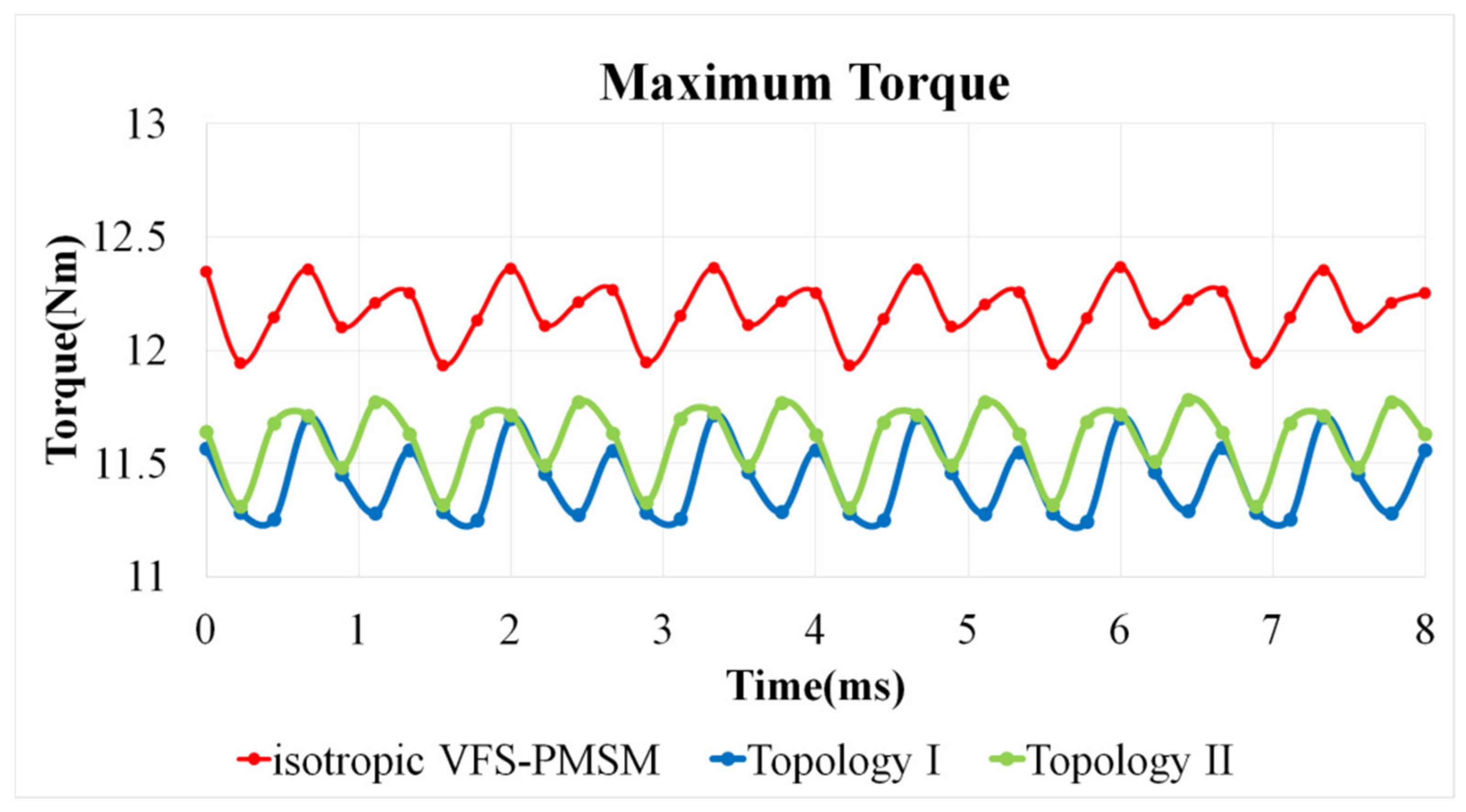
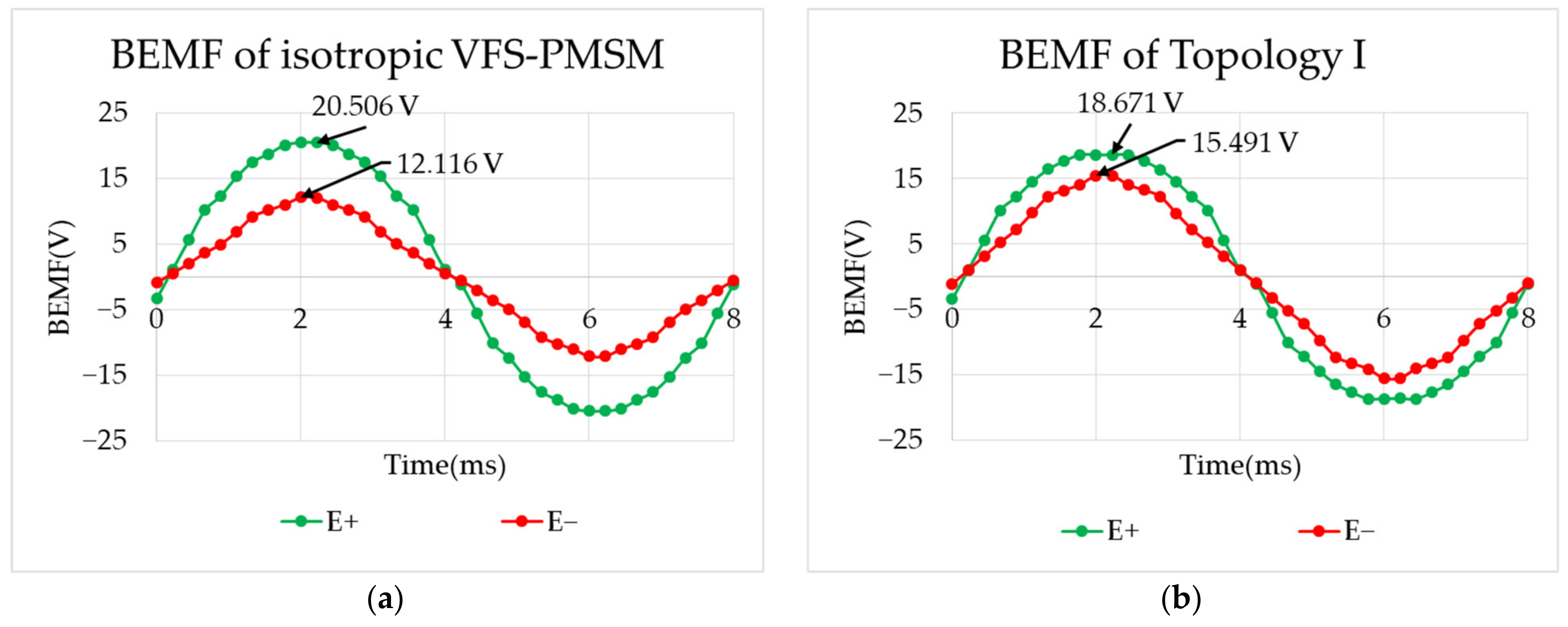
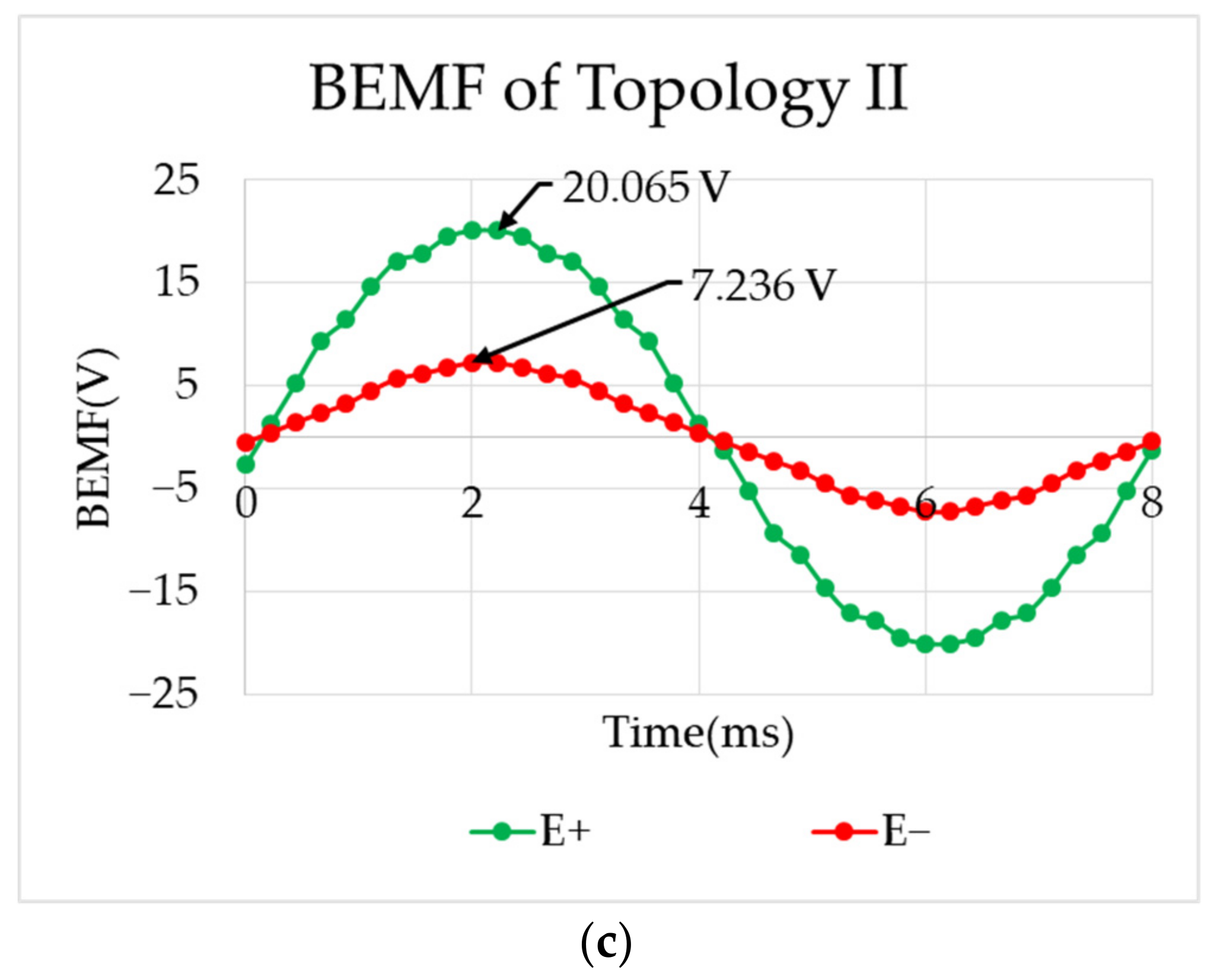
5. Comparison of Anisotropic and Isotropic VFS-PMSMS by Simulation
- (I)
- The comparison under the same maximum torque production;
- (II)
- The comparison under the same flux regulation ability Er.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mun, J.; Park, G.; Seo, S.; Kim, D.; Kim, Y.; Jung, S. Design Characteristics of IPMSM With Wide Constant Power Speed Range for EV Traction. IEEE Trans. Magn. 2017, 53, 8105104. [Google Scholar] [CrossRef]
- Hwang, M.-H.; Han, J.-H.; Kim, D.-H.; Cha, H.-R. Design and Analysis of Rotor Shapes for IPM Motors in EV Power Traction Platforms. Energies 2018, 11, 2601. [Google Scholar] [CrossRef] [Green Version]
- Huynh, T.A.; Hsieh, M.F. Comparative Study of PM-Assisted SynRM and IPMSM on Constant Power Speed Range for EV Applications. IEEE Trans. Magn. 2017, 53, 8211006. [Google Scholar] [CrossRef]
- Kim, H.J.; Lee, C.S. Shape Parameters Design for Improving Energy Efficiency of IPM Traction Motor for EV. IEEE Trans. Veh. Technol. 2021, 70, 6662–6673. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, W.; McLoone, S.; Morrow, J. Design and flux-weakening control of an interior permanent magnet synchronous motor for electric vehicles. IEEE Trans. Appl. Supercond. 2016, 26, 0606906. [Google Scholar] [CrossRef] [Green Version]
- Fadel, M.; Sepulchre, L.; Pietrzak-David, M. Deep Flux-Weakening Strategy with MTPV for High-Speed IPMSM for Vehicle Application. IFAC-PapersOnLine 2018, 51, 616–621. [Google Scholar] [CrossRef]
- Liu, X.; Chen, H.; Zhao, J.; Belahcen, A. Research on the performances and parameters of interior PMSM used for electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3533–3545. [Google Scholar] [CrossRef]
- Inoue, Y.; Morimoto, S.; Sanada, M. Comparative Study of PMSM Drive Systems Based on Current Control and Direct Torque Control in Flux-Weakening Control Region. IEEE Ind. Appl. 2012, 6, 2382–2389. [Google Scholar] [CrossRef]
- Liu, J.; Gong, C.; Han, Z.; Yu, H. IPMSM Model Predictive Control in Flux-Weakening Operation Using an Improved Algorithm. IEEE Trans. Ind. Electron. 2018, 65, 9378–9387. [Google Scholar] [CrossRef]
- Leonardi, F.; Matsuo, T.; Li, Y.; Lipo, T.A.; McCleer, P. Design considerations and testresults for a doubly salient PM motor with flux control. In Proceedings of the IAS ’96. Conference Record of the 1996 IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996. [Google Scholar]
- Finken, T.; Hameyer, K. Study of Hybrid Excited Synchronous Alternators for Automotive Applications Using Coupled FE and Circuit Simulations. IEEE Trans. Magn. 2008, 44, 1598–1601. [Google Scholar] [CrossRef]
- Fodorean, D.; Djerdir, A.; Viorel, I.; Miraoui, A. A Double Excited Synchronous Machine for Direct Drive Application—Design and Prototype Tests. IEEE Trans. Energy Convers. 2007, 22, 656–665. [Google Scholar] [CrossRef]
- Luo, X.G.; Lipo, T.A. A synchronous/permanent magnet hybrid AC machine. IEEE Trans. Energy Convers. 2000, 15, 203–210. [Google Scholar]
- Li, Y.; Lipo, T.A. A doubly salient permanent magnet motor capable of field weakening. In Proceedings of the Power Electronics Specialists Conference, Atlanta, GA, USA, 18–22 June 1995. [Google Scholar]
- Kosaka, T.; Kano, Y.; Matsui, N.; Pollock, C. A novel multi-pole permanent magnet synchronous machine with SMC bypass core for magnet flux and SMC field-pole core with toroidal coil for independent field strengthening/weakening. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar]
- Ozawa, I.; Kosaka, T.; Matsui, N. Less rare—Earth Magnet-high power density hybrid excitation motor designed for hybrid electric vehicle. In Proceedings of the 2009 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009. [Google Scholar]
- Naoe, N.; Fukami, T. Trial production of a hybrid excitation type synchronous machine. In Proceedings of the IEEE Electric Machines and Drives Conference, Cambridge, MA, USA, 17–20 June 2001. [Google Scholar]
- Ostovic, V. Memory motors. IEEE Ind. Appl. Mag. 2003, 9, 52–61. [Google Scholar] [CrossRef]
- Ostovic, V. Memory motors-a new class of controllable flux PM machines for a true wide speed operation. In Proceedings of the IEEE Industry Applications Conference, Chicago, IL, USA, 30 September–4 October 2001. [Google Scholar]
- Limsuwan, N.; Kato, T.; Akatsu, K.; Lorenz, R.D. Design and Evaluation of a Variable-Flux Flux-Intensifying Interior Permanent-Magnet Machine. IEEE Trans. Ind. Appl. 2014, 50, 1015–1024. [Google Scholar] [CrossRef]
- Kato, T.; Limsuwan, N.; Yu, C.Y.; Akatsu, K.; Lorenz, R.D. Rare earth reduction using a novel variable magnetomotive force flux-intensified IPM machine. IEEE Trans. Ind. Appl. 2014, 50, 1748–1756. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Hua, H.; Pride, A.; Deodhar, R.; Sasaki, T. Analysis and Reduction of Unipolar Leakage Flux in Series Hybrid Permanent-Magnet Variable Flux Memory Machines. IEEE Trans. Magn. 2017, 53, 2500604. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, Y.; Shen, J. Analysis and improvement of a hybrid permanent-magnet memory motor. IEEE Trans. Energy Convers. 2016, 31, 915–923. [Google Scholar] [CrossRef]
- Liu, F.L.; Cheng, L.M.; Wang, M.Q.; Qiao, G.Y.; Zheng, P.; Yang, H. Comparative study of hybrid-PM variable-flux machines with different series PM configurations. AIP Adv. 2019, 9, 125241. [Google Scholar] [CrossRef]
- Wang, M.Q.; Yu, B.; Tong, C.D.; Oiao, G.Y.; Liu, F.L.; Yang, S.J.; Zheng, P. Optimization on Magnetization-Regulation Performance of a Variable-Flux Machine with Parallel Permanent Magnets. In Proceedings of the 2020 IEEE 19th Biennial Conference on Electromagnetic Field Computation (CEFC), Pisa, Italy, 16–18 November 2020. [Google Scholar]
- Hua, H.; Zhu, Z.Q.; Pride, A.; Deodhar, R.; Sasaki, T. Comparative study of variable flux memory machines with parallel and series hybrid magnets. IEEE Trans. Ind. Appl. 2019, 55, 1408–1419. [Google Scholar] [CrossRef]
- Zhang, S.; Zheng, P.; Jahns, T.M.; Cheng, L.; Wang, M.; Sui, Y. A Novel Variable-Flux Permanent-Magnet Synchronous Machine with Quasi-Series Magnet Configuration and Passive Flux Barrier. IEEE Trans. Magn. 2018, 54, 8109705. [Google Scholar] [CrossRef]
- Yang, H.; Zheng, H.; Lin, H.; Zhu, Z.Q.; Lyu, S. A Novel Variable Flux Dual-Layer Hybrid Magnet Memory Machine with Bypass Airspace Barriers. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019. [Google Scholar]
- Yang, H.; Zheng, H.; Lyu, S.; Lin, H.; Zhu, Z.Q.; Fu, W. Analysis of Flux Regulation Principle in a Novel Hybrid-Magnet-Circuit Variable Flux Memory Machine. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar]
- Yang, H.; Lyu, S.; Lin, H.; Zhu, Z.; Zheng, H.; Wang, T. A Novel Hybrid-Magnetic-Circuit Variable Flux Memory Machine. IEEE Trans. Ind. Electron. 2020, 67, 5258–5268. [Google Scholar] [CrossRef]
- Yang, H.; Zheng, H.; Lin, H.Y.; Zhu, Z.Q.; Fu, W.N.; Liu, W.; Lei, J.X.; Lyu, S.K. Investigation of Hybrid-Magnet-Circuit Variable Flux Memory Machines with Different Hybrid Magnet Configurations. IEEE Trans. Ind. Appl. 2020, 57, 340–351. [Google Scholar] [CrossRef]
- Lee, Y.H.; Hsieh, M.F.; Chen, P.H. Novel Swiveling Variable Flux Motor with Spoke Type Interior Permanent Magnet. IEEE Access 2022. submitted. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| DC-link voltage Udc (V) | 48 |
| Phase Current (peak) (A) | 60 |
| Power (kW) | 2 |
| Rated Speed (rpm) | ~1500 |
| Outer diameter of stator (mm) | 160 |
| Outer diameter of rotor (mm) | 112 |
| Air gap (mm) | 1 |
| Stack length (mm) | 36 |
| Winding turns per phase (turns) | 36 |
| HCF PM grade | N32H |
| LCF PM grade (isotropic VFS-PMSM/Topology I & II (T_I&II)) | LNGT18/LNGT40 |
| HCF PM coercivity (kA/m) | 886 |
| LCF PM (isotropic VFS-PMSM/T_I&II) coercivity (kA/m) | 100.5/115.7 |
| HCF PM remanence (T) | 1.146 |
| LCF PM (isotropic VFS-PMSM/T_I&II) remanence (T) | 0.58/0.866 |
| Stator & rotor steel | 25CS1500HF |
| Remanence of LCF Magnets | Isotropic VFS-PMSM | Topology I | Topology II |
|---|---|---|---|
| Radial | 0.58 T | 0.895 T | 0.364 T |
| Tangential | 0.58 T | 0.364 T | 0.895 T |
| Magnetizing Field Strength Needed in Easy Axis | |||
| Swiveling (A) | General (B) | Decrease Rate (B − A)/B | |
| MS = 100% | 3.32 | 4.55 | 27.0% |
| MS = 75% | 2.07 | 2.27 | 8.8% |
| MS = 50% | 1.58 | 1.95 | 19.0% |
| Magnetizing Field Strength Needed in Hard Axis | |||
| Swiveling (A) | General (B) | Decrease Rate (B − A)/B | |
| MS = 100% | 4.42 | 4.55 | 2.9% |
| MS = 75% | 2.76 | 2.95 | 6.4% |
| MS = 50% | 1.9 | 2.12 | 10.4% |
| Parameters (Unit) | Value |
|---|---|
| θh (°) | 36 |
| θL (°) | 5.5 |
| Wh (mm) | 8 |
| WL (mm) | 6 |
| VFS-PMSM (A) | Final Type (B) | Difference (%) ((B − A)/A) | |
| Max. Torque (Nm) | 12.12 | 13.47 | +11.14% |
| Er (V) | 8.39 | 8.68 | +3.46% |
| VFS-PMSM(A) | Final Type (B) | Difference (%) ((B − A)/A) | |
| Max. Torque (Nm) | 12.12 | 12.16 | +0.33% |
| Er (V) | 8.39 | 11.53 | +37.43% |
| Series (A) | Final Type (B) | Difference (%) ((B − A)/A) | |
| Max. Torque (Nm) | 12.83 | 13.76 | +7.25% |
| Er (V) | 7.86 | 7.84 | −0.25% |
| Series (A) | Final Type (B) | Difference (%) ((B − A)/A) | |
| Max. Torque (Nm) | 12.83 | 12.86 | +0.23% |
| Er (V) | 7.86 | 9.97 | +26.84% |
| Parallel(A) | Final Type (B) | Difference (%) ((B − A)/A) | |
| Max. Torque (Nm) | 12.3 | 11.4 | −7.32% |
| Er (V) | 12.74 | 13.01 | +2.11% 1 |
| Parallel(A) | Final Type (B) | Difference (%) ((B − A)/A) | |
| Max. Torque (Nm) | 12.3 | 12.53 | +1.87% |
| Er (V) | 12.74 | 10.66 | −16.33% 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, Y.-H.; Hsieh, M.-F. Swiveling Magnetization for Anisotropic Magnets for Variable Flux Spoke-Type Permanent Magnet Motor Applied to Electric Vehicles. Energies 2022, 15, 3825. https://doi.org/10.3390/en15103825
Lee Y-H, Hsieh M-F. Swiveling Magnetization for Anisotropic Magnets for Variable Flux Spoke-Type Permanent Magnet Motor Applied to Electric Vehicles. Energies. 2022; 15(10):3825. https://doi.org/10.3390/en15103825
Chicago/Turabian StyleLee, Yin-Hui, and Min-Fu Hsieh. 2022. "Swiveling Magnetization for Anisotropic Magnets for Variable Flux Spoke-Type Permanent Magnet Motor Applied to Electric Vehicles" Energies 15, no. 10: 3825. https://doi.org/10.3390/en15103825
APA StyleLee, Y.-H., & Hsieh, M.-F. (2022). Swiveling Magnetization for Anisotropic Magnets for Variable Flux Spoke-Type Permanent Magnet Motor Applied to Electric Vehicles. Energies, 15(10), 3825. https://doi.org/10.3390/en15103825