
Fault Tracking Method for Relay Protection Devices


Abstract
:1. Introduction
2. Microcomputer Protection
2.1. Composition of Microcomputer Relay Protection
- Hardware: The hardware of a microcomputer protection device mainly includes the analog input (AI), digital input (DI), central processing unit main system (CPU), digital output (DO), man–machine conversation interface (MMI), communication interface (CI) and power supplement unit (PSU). Among them, analog input is responsible for voltage and current analog acquisition and signal discretization. The digital input is responsible for collecting the contact information from the switchblade, the protection plate and other devices. The CPU main system includes the microprocessor CPU, data memory, program memory, timer, parallel interface and serial interface, which is responsible for the measurement, logic and control functions of relay protection. The digital output is composed of a photoelectric coupler and relay, which is responsible for protection against tripping and warning signal output. The power supply circuit provides DC regulated power for the whole device to ensure reliable power supply.
- Software: The software of a microcomputer protection device mainly includes the data acquisition, digital signal processing, protection discrimination logic, human–computer interaction program, self-checking program, communication interface program and operating system.
2.2. Fault Analysis of Microcomputer Protection Device
3. Reasoning Chain and Bayesian Network
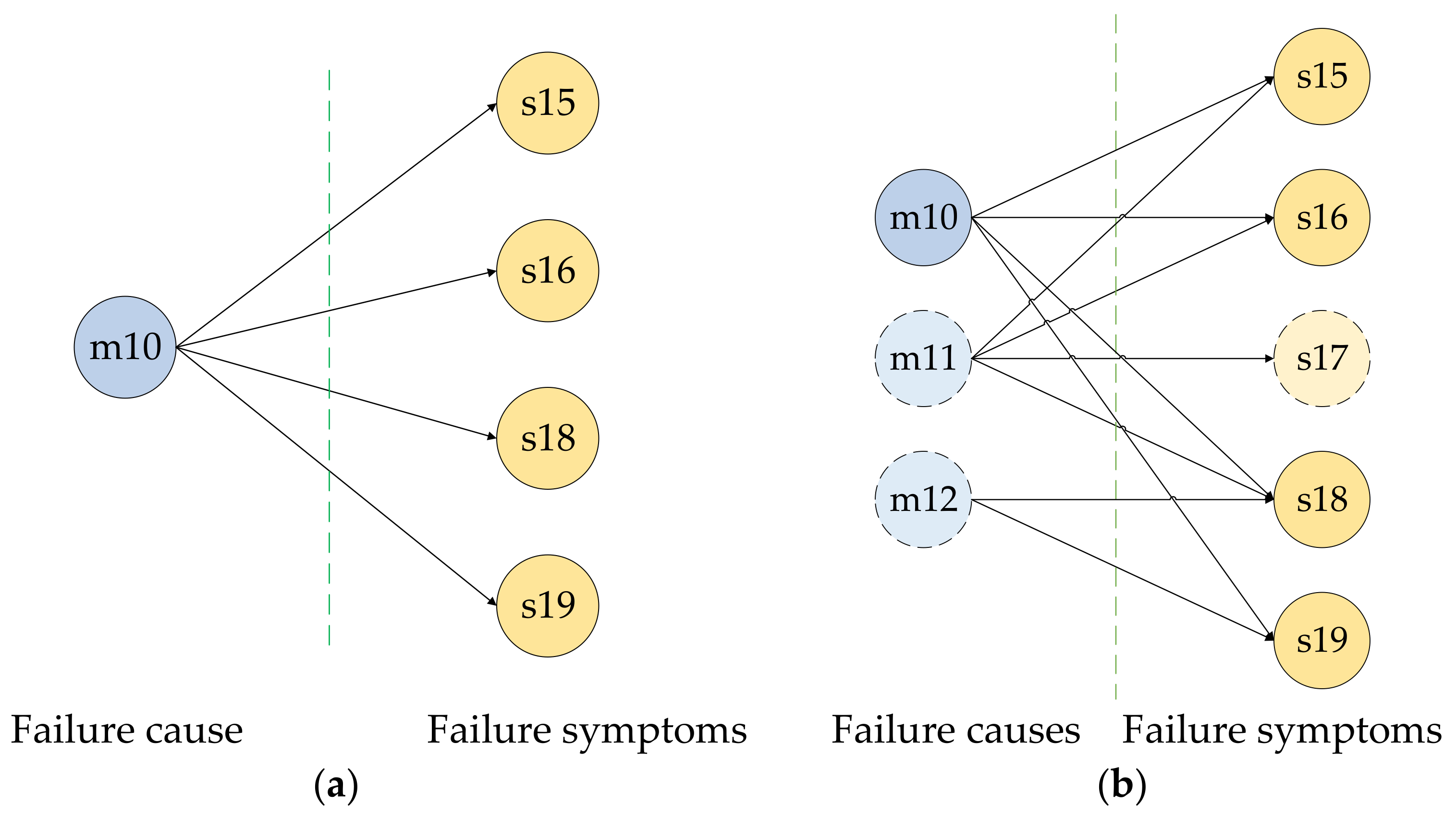
3.1. Reasoning Chain
3.2. Bayesian Network
4. Construction of Fault Tracking Model
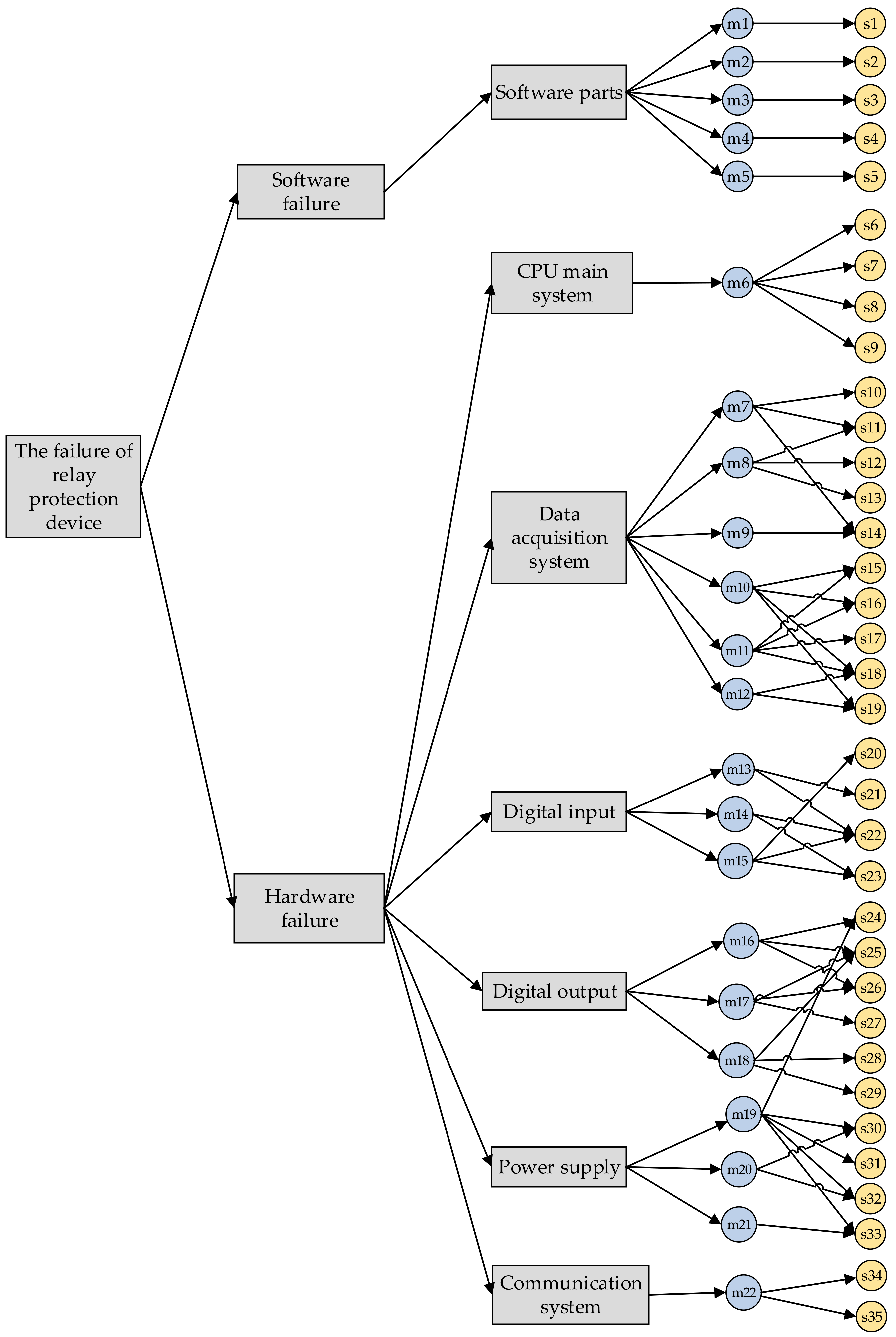
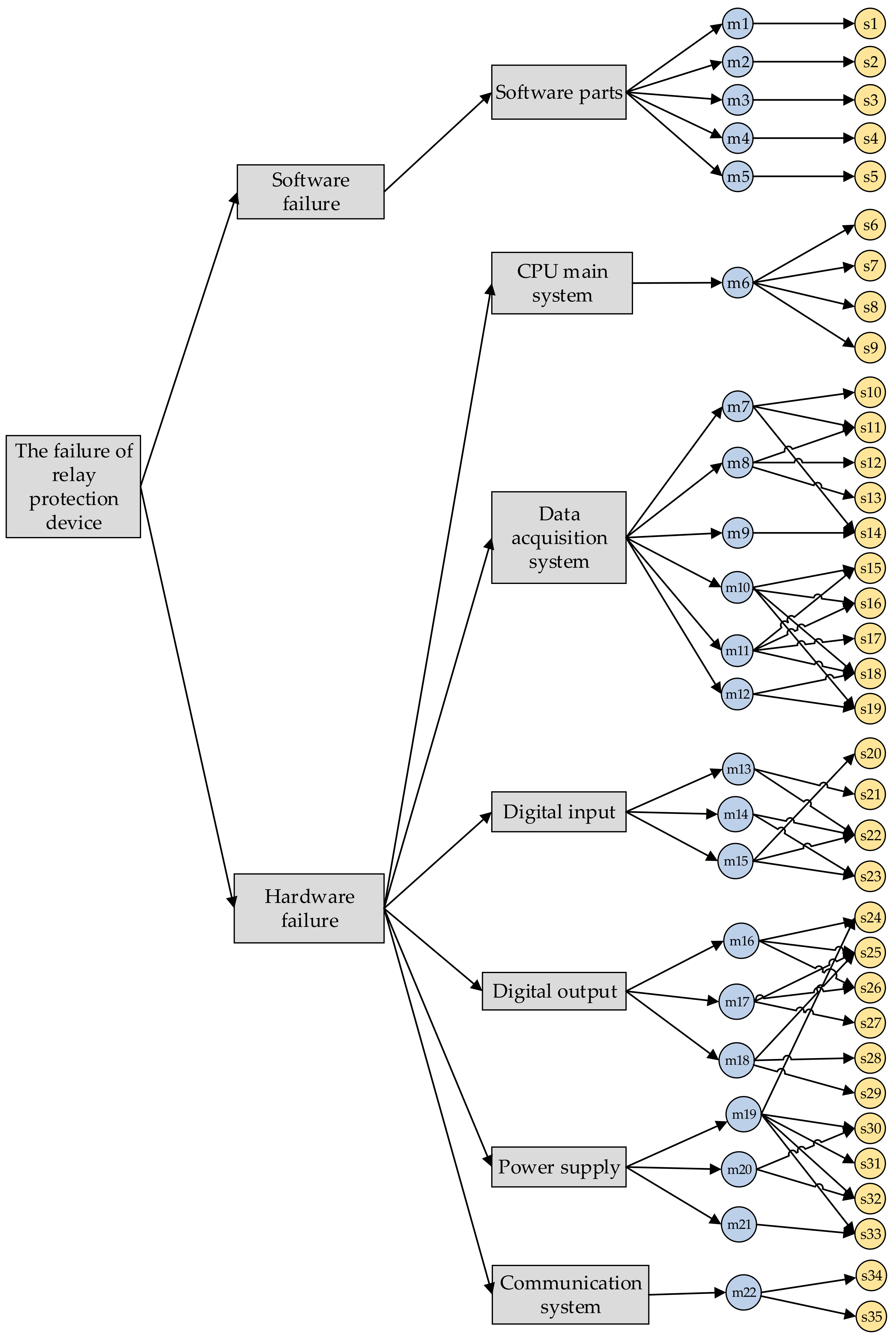
4.1. Construction of Reasoning Chain
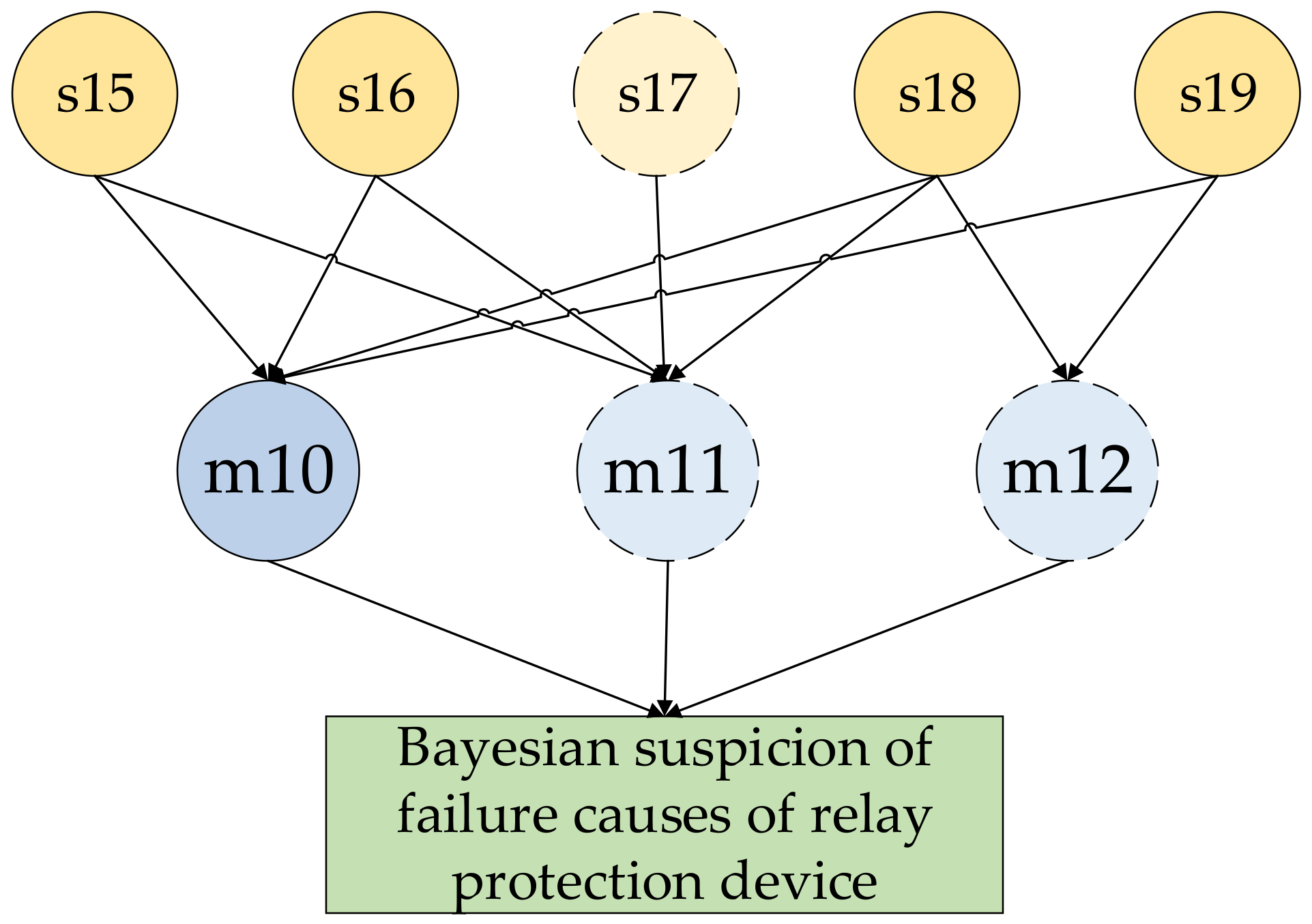
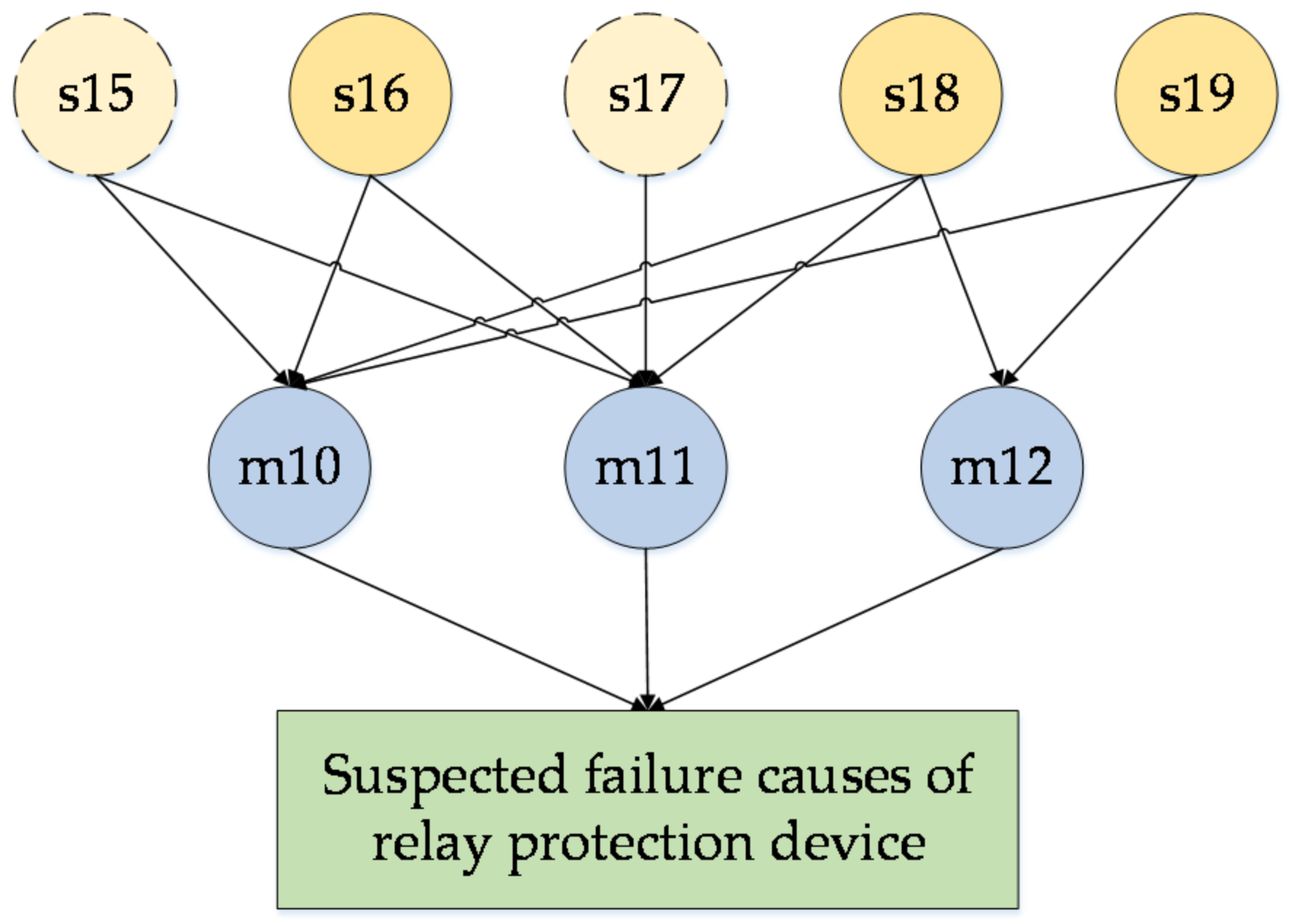
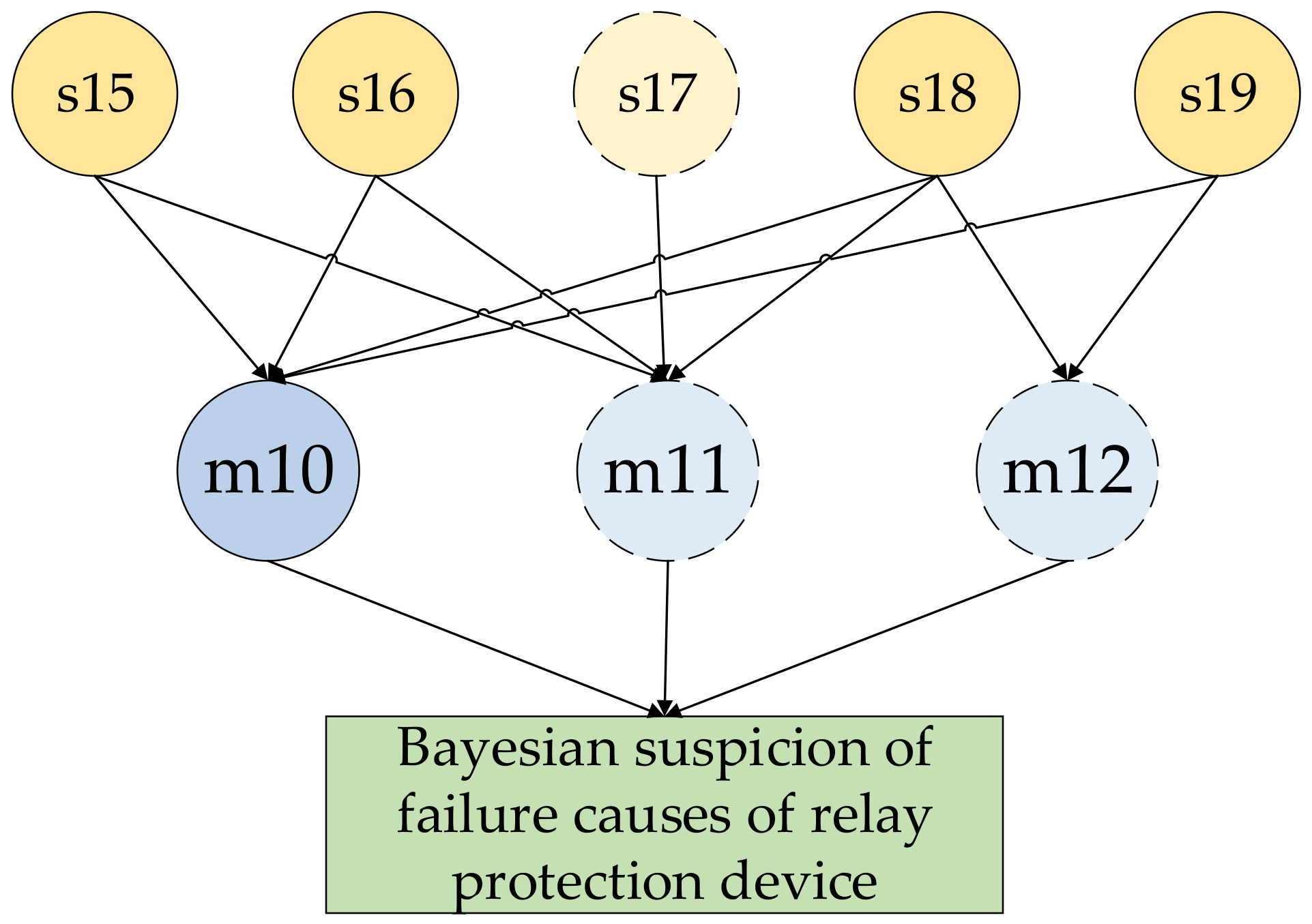
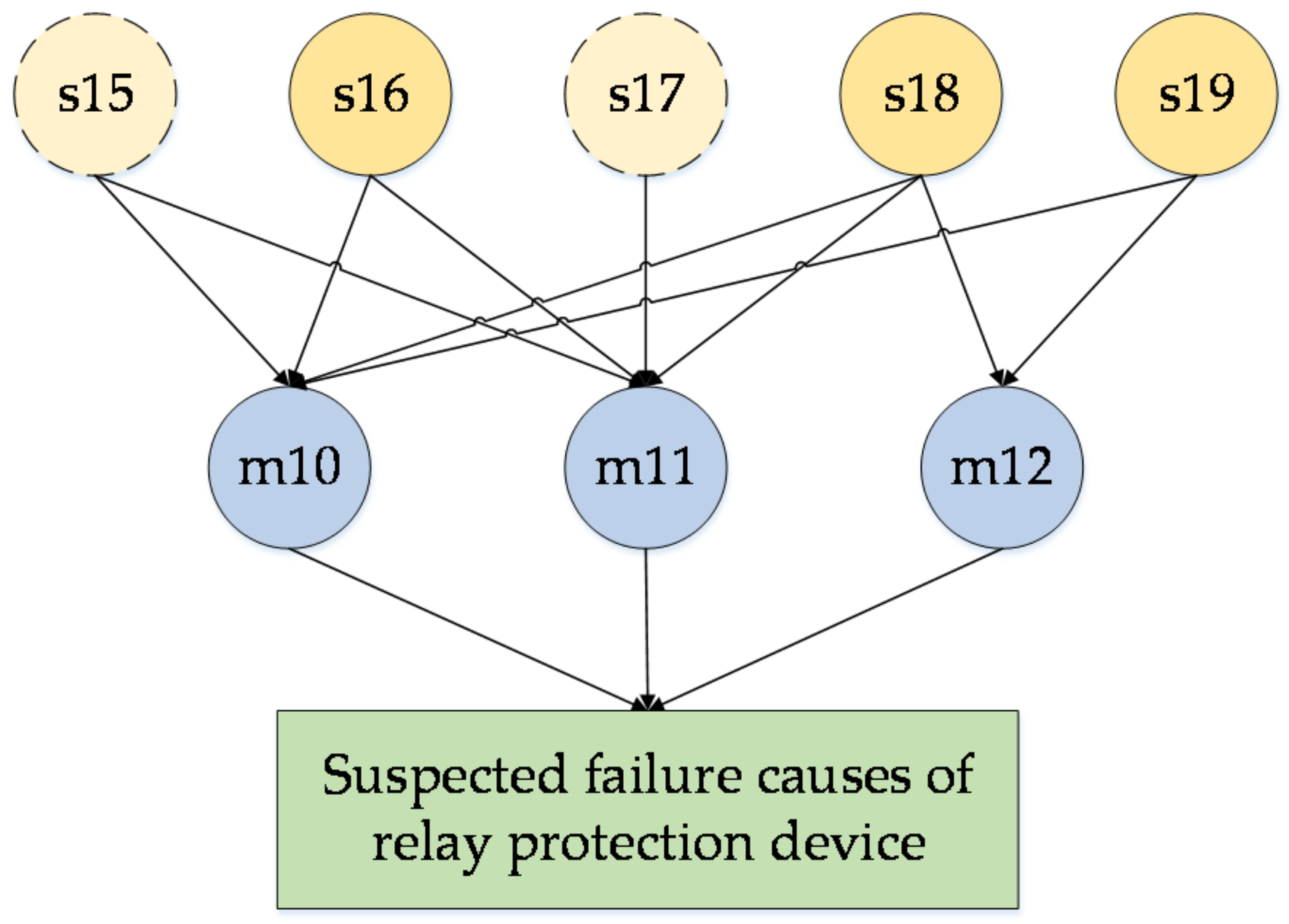
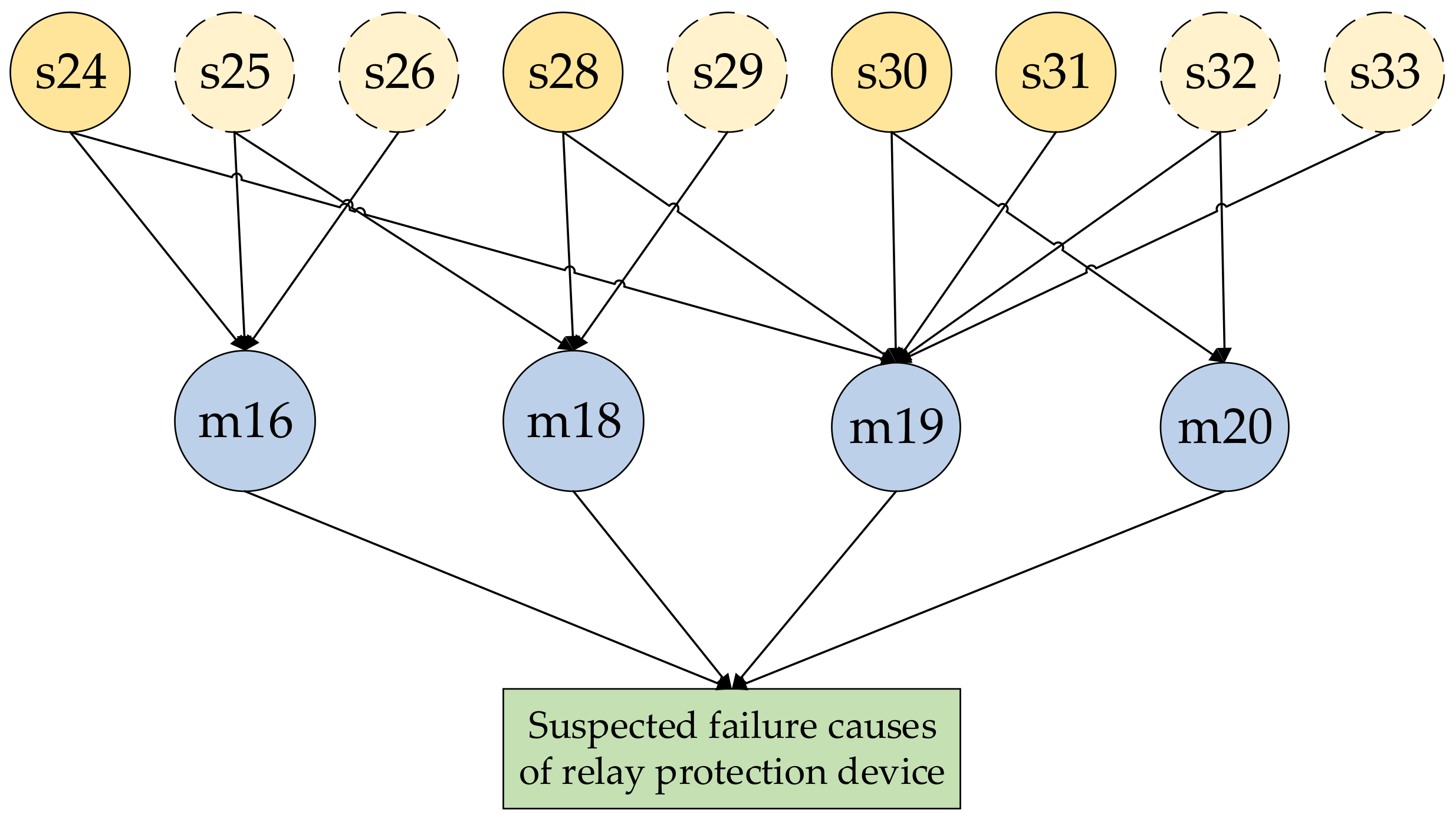
4.2. Construction of Bayesian Networks
4.3. Fault Tracking Process
5. Case Studies
5.1. Fault Case 1 (Simple Fault)
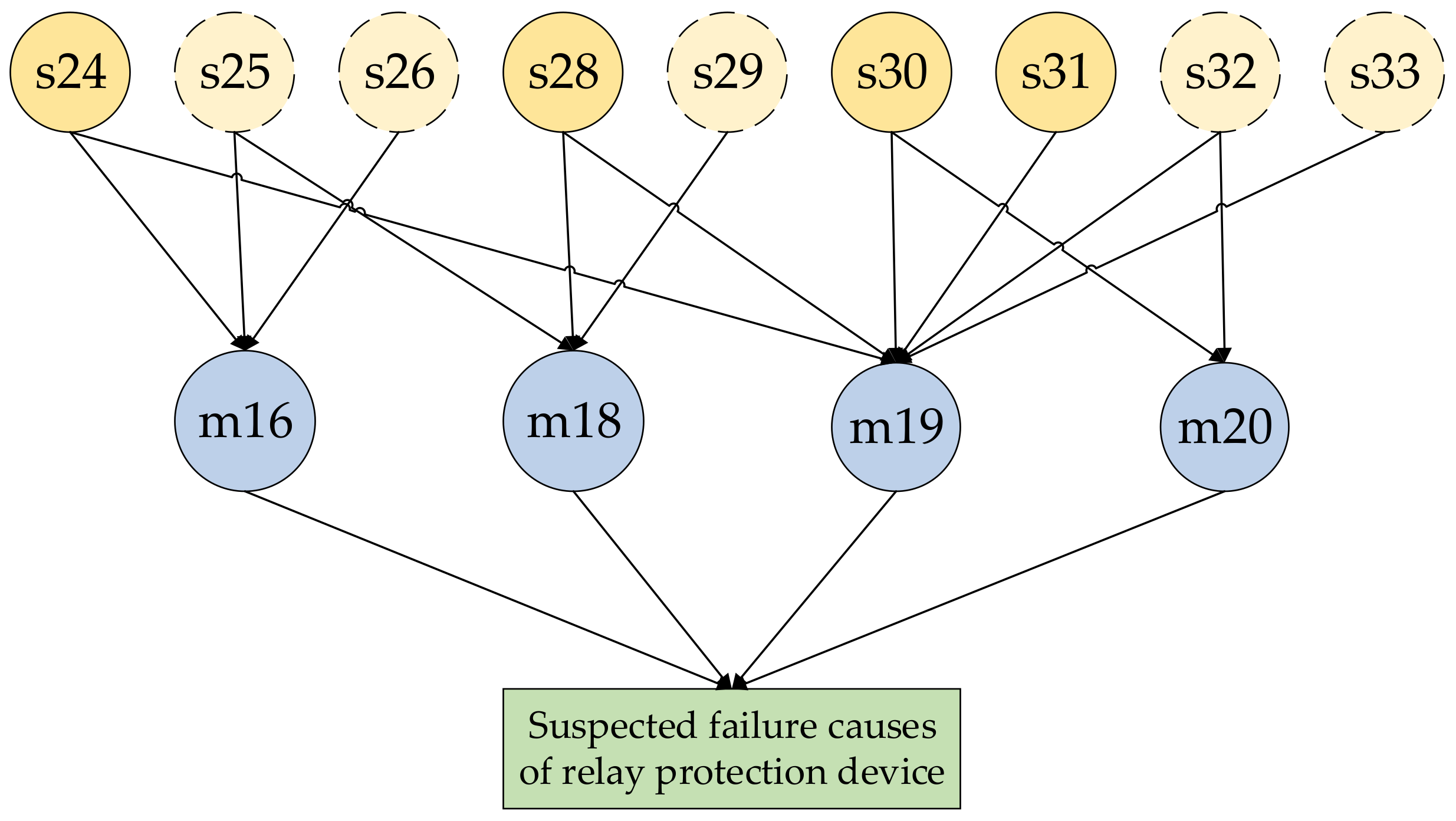
5.2. Fault Case 2 (Complex Faults)
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | s1 | s2 | s3 | s4 | s5 | s6 | s7 | s8 | s9 | s10 | s11 | s12 | s13 | s14 | s15 | s16 | s17 | s18 | s19 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m1 | 1 | ||||||||||||||||||
| m2 | 1 | ||||||||||||||||||
| m3 | 1 | ||||||||||||||||||
| m4 | 0.9 | ||||||||||||||||||
| m5 | 0.9 | ||||||||||||||||||
| m6 | 0.1 | 0.35 | 0.4 | 0.15 | |||||||||||||||
| m7 | 0.75 | 0.75 | 0.5 | ||||||||||||||||
| m8 | 0.55 | 1 | 0.95 | ||||||||||||||||
| m9 | 0.95 | ||||||||||||||||||
| m10 | 0.05 | 0.75 | 0.55 | 0.7 | |||||||||||||||
| m11 | 0.95 | 0.55 | 1 | 0.2 | |||||||||||||||
| m12 | 0.4 | 0.3 |
| Number | s20 | s21 | s22 | s23 | s24 | s25 | s26 | s27 | s28 | s29 | s30 | s31 | s32 | s33 | s34 | s35 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m13 | 0.6 | 0.85 | 0.15 | |||||||||||||
| m14 | 0.75 | 0.1 | ||||||||||||||
| m15 | 0.5 | 0.15 | 0.9 | |||||||||||||
| m16 | 0.9 | 0.55 | 0.5 | |||||||||||||
| m17 | 0.45 | 0.5 | 0.95 | |||||||||||||
| m18 | 0.45 | 0.9 | 0.4 | |||||||||||||
| m19 | 0.75 | 0.55 | 0.9 | 0.6 | 0.4 | 0.15 | ||||||||||
| m20 | 0.65 | 0.9 | ||||||||||||||
| m21 | 0.95 | |||||||||||||||
| m22 | 0.7 | 0.95 |
Appendix B
References
- Wang, L.; Chen, Q.; Gao, H.; Ma, Z.; Zhang, Y.; He, D. Framework of fault trace for smart substation based on big data mining technology. Electr. Power Syst. Res. 2017, 42, 84–90. [Google Scholar]
- Xia, Y. Study on the method of condition-based maintenance of relay protection. Master’s Thesis, Chongqing University, Chongqing, China, 2010. [Google Scholar]
- Jiang, T. Research on practical appliance for condition-based maintenance of protective relays. Master’s Thesis, Zhejiang University, Hangzhou, China, 2008. [Google Scholar]
- Chen, S. Research on failure detection and maintenance strategies of relay protection. Ph.D. Thesis, North China Electric Power University, Beijing, China, 2016. [Google Scholar]
- Shen, Z. Probability of relay protection failure and its impact on operational reliability of power transmission system. Ph.D. Thesis, Chongqing University, Chongqing, China, 2008. [Google Scholar]
- Long, P. Research of failure model and online operation maintenance method for relay protection in smart substation. Master’s Thesis, South China University of Technology, Guangzhou, China, 2017. [Google Scholar]
- Zhang, W. On-line monitoring and diagnosis technology of hidden failure of protection system. Master’s Thesis, Tianjin University, Tianjin, China, 2014. [Google Scholar]
- Ye, Y.; Sun, Y.; Huang, T.; Guo, M.; Huang, Y. Online state detection and fault diagnosis technology of relay protection secondary circuits in smart substation. Power Syst. Prot. Control 2016, 44, 148–153. [Google Scholar]
- Shi, N.; Dai, H.; Tian, H. Analysis and countermeasures on transformer’s secondary circuit two-point earthing. Hebei Electr. Power 2010, 29, 28–30. [Google Scholar]
- Sun, W.; Teng, X.; Ma, N. Fault Diagnosis of Relay Protection Device Based on Fuzzy Bp Neutral Network Model. In Proceedings of the 13th IEEE Joint International Computer Science and Information Technology Conference (JICSIT), Chongqing, China, 1–8 January 2011. [Google Scholar]
- Qu, Z.; Wang, Y. Failure Analysis of Relay Protection in Digital Substation Based on Fault Tree. In Proceedings of the 2012 China International Conference on Electricity Distribution (CICED 2012), Shanghai, China, 10–14 September 2012. [Google Scholar]
- Zhao, J.; Fu, Z. Microcomputer Protection of Power System; Machinery Industry Press: Beijing, China, 2016. [Google Scholar]
- Chen, L. Practical Technology for Maintenance of Microcomputer Protection Devices of 110 kV and Below; China Electric Power Press: Beijing, China, 2014. [Google Scholar]
- Liu, Z. Failure analysis of relay protection switching power supply. China Electr. Power 2012, 8, 14–16. [Google Scholar] [CrossRef]
- Wu, X.; Guo, C. Power System Fault Diagnosis Approach Based on Bayesian Network. Proc. Electr. Power Syst. Autom. 2005, 17, 11–15. [Google Scholar]
- Zhang, Y. Creating a reasoning chain determinately. Comput. Sci. Appl. 2016, 6, 545–550. [Google Scholar]
- Zhang, N.; Feng, L.; Yang, J.; Wang, J. Transmission grid fault diagnosis based on reasoning chain. Autom. Electr. Power Syst. 2014, 38, 78–84. [Google Scholar]
- Negnevitsky, M. Uncertainty management in rule—Based expert system. In Artificial Lntelligence: A Guide to Lntelligent Systems; Mechanical Industry Press: Beijing, China, 2012; Volume 3, pp. 39–46. [Google Scholar]
- Ma, X. Fault diagnosis for transmission network based on timing Bayesian suspected degree. Master’s Thesis, Shandong University, Jinan, China, 2016. [Google Scholar]

| Failure Location | Number | Failure Causes | Prior Probability p/% |
|---|---|---|---|
| Software parts | m1 | Setting value area change | 1.98 |
| m2 | TA ratio compensation coefficient change | 2.40 | |
| m3 | Resistance values of distance protection change | 2.70 | |
| m4 | Fixed-value-setting error | 1.21 | |
| m5 | Software setting problem | 0.56 | |
| CPU main system | m6 | CPU component faults | 2.26 |
| Data acquisition system | m7 | Multi-point grounding in the secondary circuit of TA | 14.22 |
| m8 | Poor contact or abruption of secondary circuit of TA | 8.25 | |
| m9 | TA saturation | 7.33 | |
| m10 | Multipoint grounding in the secondary circuit of TV | 12.63 | |
| m11 | Poor contact or abruption of secondary circuit of TV | 7.74 | |
| m12 | Voltage transformer wiring error | 3.93 | |
| Digital input | m13 | Virtual connection or abruption in digital input | 4.47 |
| m14 | Short circuit faults in digital input | 3.59 | |
| m15 | Protection plate fault in digital input | 3.85 | |
| Digital output | m16 | Virtual connection or abruption in digital output | 4.10 |
| m17 | Short circuit faults in digital output | 3.33 | |
| m18 | Relay fault of digital output | 5.26 | |
| Power supplement unit | m19 | Power supply cannot work properly | 3.21 |
| m20 | Poor performance of voltage regulator circuit components | 1.68 | |
| m21 | Excessive starting current of power supply | 1.33 | |
| Communication interface | m22 | Communication interface fault | 2.23 |
| Number | Failure Symptoms | Number | Failure Symptoms |
|---|---|---|---|
| s1 | Setting value check inconsistency | s19 | Voltage waveform distortion |
| s2 | Current differential setting value verification inaccuracy | s20 | A function plate cannot input |
| s3 | Distance protection setting value verification inaccuracy | s21 | Protection device cannot reset |
| s4 | Fixed value error alarm | s22 | Unable to reclose breaker |
| s5 | Protective soft-clamp not put into operation or control word set zero | s23 | Inputting another protection plate when inputting a hard plate |
| s6 | RAM fault alarm | s24 | Switch indicator light is not on |
| s7 | A/D protection fault alarm | s25 | Protection output fault warning |
| s8 | Digital signal processor fault alarm | s26 | Unable to manually switch |
| s9 | Content damage alarm of fixed value area | s27 | Switch jumps off soon after switch closing |
| s10 | AB/BC/AC phase diffluent of current sampling | s28 | Protection-switching relay power failure |
| s11 | Abnormal data/invalid warning of current sampling | s29 | Protection-switching relay switch on at the same time |
| s12 | TA protection break line warning | s30 | DC power supply fault warning |
| s13 | Current sampling is zero | s31 | DC protection disappears |
| s14 | Current waveform distortion | s32 | Abnormal output power of power supply |
| s15 | Voltage sampling is zero | s33 | Power overload alarm |
| s16 | Abnormal data/invalid warning of voltage sampling | s34 | Communication interruption |
| s17 | TV protection break-line warning | s35 | Communication channel anomaly |
| s18 | Three-phase voltage ripple |
| Failure Cause | Prior Probability | Conditional Probability | ||||
|---|---|---|---|---|---|---|
| s15 | s16 | s17 | s18 | s19 | ||
| m10 | 12.63 | 0.05 | 0.5 | — | 0.55 | 0.7 |
| m11 | 7.74 | 0.95 | 0.5 | 1 | 0.2 | — |
| m12 | 3.93 | — | — | — | 0.4 | 0.3 |
| Failure Cause | Posterior Probability | ||||
|---|---|---|---|---|---|
| s15 | s16 | s17 | s18 | s19 | |
| m10 | 0.079 | 0.69 | — | 0.69 | 0.882 |
| m11 | 0.921 | 0.31 | 1 | 0.154 | — |
| m12 | — | — | — | 0.156 | 0.118 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Zhou, X.; Sun, M.; Zhang, X. Fault Tracking Method for Relay Protection Devices. Energies 2021, 14, 2723. https://doi.org/10.3390/en14092723
Chen Q, Zhou X, Sun M, Zhang X. Fault Tracking Method for Relay Protection Devices. Energies. 2021; 14(9):2723. https://doi.org/10.3390/en14092723
Chicago/Turabian StyleChen, Qing, Xiaotong Zhou, Mengxuan Sun, and Xiaotong Zhang. 2021. "Fault Tracking Method for Relay Protection Devices" Energies 14, no. 9: 2723. https://doi.org/10.3390/en14092723
APA StyleChen, Q., Zhou, X., Sun, M., & Zhang, X. (2021). Fault Tracking Method for Relay Protection Devices. Energies, 14(9), 2723. https://doi.org/10.3390/en14092723