1. Introduction
With the rapid development of world economy, the exploitation of fossil energy resources and the corresponding problem of environmental pollution make the search of sustainable energy as an urgent issue for all countries [
1]. Wind energy is one such kind of sustainable energy whose conversion technology has been developed very quickly [
2,
3,
4]. The wind turbine is the most important equipment which converts kinetic energy of the coming flow into electrical energy. Two types of wind turbine exist in the industry: the horizontal axis wind turbine (HAWT) and the vertical axis wind turbine (VAWT). The HAWT is widely used in the commercial electrical power generation [
5]. In comparison with the HAWT, the VAWT does not need any yaw mechanism and takes the wind from all the directions [
6].
The VAWT can be divided into several types, as shown in
Figure 1: Darrieus type, Savonius type, mixed Darrieus and Savonius type, Sistan type and Zephyr type [
6]. Among all these different types of VAWT, the Darrieus type has the biggest energy extraction efficiency and it is firstly designed at 1931 [
7]. According to the longitudinal section shape of the rotor, the Darrieus VAWT can be further divided into H type and Φ type. The bending stress of the Φ type Darrieus wind turbine is very small, which makes it not convenient to start up by using the speed-control method. The H type Darrieus wind turbine has the advantage of simple structure, small weight and good stability, etc. It is of good energy extraction efficiency and has a wide application potential [
8].
Among all the research aspects of VAWT, the study about the deformable blades has attracted many attention of researchers. Daynes [
9] proposed a morphing flap equipped with a highly anisotropic cellular structure. This morphing flap enables undergo large deflections and high strains without a large actuation penalty. When compared to a conventional hinged flap, the proposed morphing flap is experimentally validated with a manufactured demonstrator and shown to have reduced actuation requirements. Kerho [
10] proposed an adaptive airfoil which helps reduce the negative effects of dynamic stall on rotorcraft blades. In the design of large-scale wind turbine blades, Capuzzi et al. [
11] has proposed a novel aero-elastic approach. The annual energy production of turbine is increased by suitably tailoring the elastic response of blade to aerodynamic pressure. Hoogedoorn et al. [
12] has demonstrated a computational study about the static aero-elastic response of a two-dimensional (2D) wind turbine airfoil with varying wind conditions. The static aero-elastic effects are found to have the potential to improve the lift and the lift to drag ratio at off-design wind speed conditions. Meanwhile, the flexibility delays stall to a large pitch angle, increasing the operating range of a flexible blade airfoil. Jafaryar et al. [
13] proposed a response surface methodology (RSM). This methodology is based on central composite design and can obtain an optimization design for the asymmetric blades geometry of a VAWT. Menter [
14] proposed a new kind of design method for the blade of the wind energy power generation based on a topological structure about the central axis of leaf veins. The performance of this kind of bionic design for the flexible blades is studied by using the similarity of structure and working environment between wind turbine blades and plant blades. This kind of flexible blade not only widens the range of wind speed, but also improves the wind power coefficient. Mclaren [
15] firstly applies the flying posture and feather structure for the design of the power generation with wind turbines. Due to the streamlined structure on the gull wing surface and the unique feather structure on the wing, there is almost no flow separation on the gull wing surface. Hence, Mclaren extracted the convex configuration data and the curved shape of the gull wing in combination with the requirements of wind turbine blades to design two types of bionic blades with convex and front curved shapes. According to the numerical simulation results, the bionic blades have better aerodynamic performance when compared with the traditional turbine blades.
In the research about the flexible blade of the VAWT, Ying et al. [
16] proposed a new kind of VAWT whose blade airfoil geometry deforms automatically according to the change of surface pressure. That is to say: (1) when the surface pressure is relatively high compared with a symmetrical airfoil, the blade surface is pressed inward (such as the pressure surface of NACA2412), and the shape becomes relatively gentle; (2) while the surface pressure of the blade is relatively small compared with a symmetrical airfoil, the blade surface is convex outward (such as the suction surface of NACA2412) and the shape becomes relatively convex. Blades that undergo adaptive changes in surface shape according to the above rules will have a higher capacity in absorbing wind energy, and effectively improve the wind energy extraction efficiency for this type of VAWT. Based on Ying’s research, Tong et al. [
17] designed and made a blade model suitable for VAWT whose leading edge and trailing edge can have active changes simultaneously with the single input motivation. Firstly, based on the continuous deflection and deformation method of the leading and trailing edges of the airfoil with constant thickness (according to the wing rib concept and NACA0012 airfoil as an example), the blade deformation with different curvatures were achieved by applying a pre-tightening force. Secondly, the relevant wind tunnel force measurement and flow field display platform were built up, and the quasi-steady force measurement and flow field display were performed. Experiments under different deformations were carried out using the smoke line meter, seven-hole probe, and component force balance instrument. Finally, the comparison revealed that the aerodynamic performance characteristics of the blade under different deformation factors, and the results could provide reference for subsequent unsteady experiments. Tong et al. [
17] have also conducted numerical simulation concerning the influence of the active deformation movement of the uniform-thickness mid-curve on the aerodynamic performance of the airfoil with NACA0012 as the reference airfoil at different angles of attack before and after the stall. Under the condition that the maximum deformation position of the airfoil was at 0.4
c, the incoming wind speed was of 9 m/s, the airfoil chord length was of 0.4 m, and the Reynolds number was of 2.5 × 10
5. The study found that the active deformation performances of the airfoil were different at different angles of attack. The deformation amplitude and deformation frequency would bring about different changes in aerodynamic performance.
All the airfoil design mentioned as above are for the numerical simulation or experimental study of the VAWT in 2D configuration. The 3D structural effect should be also taken into account when cases are applied in 3D situations. Hence, this paper conducts the study about the aerodynamic performance of different forms of airfoils including the pseudo 3D adaptive airfoil, the real 3D adaptive airfoil and the fish skeleton airfoil for comparison. The two-way fluid-solid coupling technique is used for the research about the stress characteristic in the fish skeleton deformation process so as to give some advice for the design and development of the adaptive airfoil which are suitable for the VAWT.
Section 2 presents the numerical simulation method for the cases involved in this paper, mainly about the governing equations and the fluid-solid coupling equations. These equations are the basic physical principles for the numerical simulation.
Section 3 is about the presentation of different cases studied, which includes the geometry, the generation of mesh, the choice of different turbulent models and the fluid-solid coupling setting for the fluid-solid coupling simulation case. Different sub-sections correspond to different cases.
Section 4 mainly focuses on the results of the numerical simulations and the corresponding discussions for different cases, where different sub-sections correspond to different cases.
2. Numerical Simulation Method
2.1. Governing Equations
In this part, the governing equations for the simulation cases involved in this paper are presented. For cases which involved pseudo 3D and real 3D simulation, the form of the governing equations keeps the same except that the z direction momentum equation needs to be extended.
The numerical simulation uses the 2D non-steady turbulence model, whose governing equations can be denoted as follows:
Momentum equation:
y direction:
where
and
indicate the effective diffusion coefficients
k and
, respectively.
Sk and
ω are the source terms defined by the users (N/m
3). Besides,
Gk and
ω indicate that the generation of the turbulent kinetic is caused by the gradient of average speed (Pa.s), which also means that the diffusion of
k is caused by the turbulence:
The turbulent viscosity is calculated as follows:
The strain rate can be formulated as:
Based on these basic equations, different solution methods for the simulation of fluid flow are used. Several different commercial software (FLUENT, CFX and Comsol, etc.) and open-source algorithm (OpenFoam) are available for the engineers to conduct the simulation, in which Fluent is adopted in this paper.
2.2. The Two-Way Fluid-Solid Coupling Theory and Equations
In this paper, a fluid-solid problem is studied. Hence the two-way fluid-solid coupling theory and Equations are described in this section. The two-way fluid-solid coupling theory and Equations take both the fluid and solid theory into consideration which helps the simulation results to approach the real physical phenomenon. The fluid-solid coupling equations are slightly different when compared with the traditional fluid dynamic equations. A brief introduction from several different aspects is made: the geometric nonlinear equations, the equilibrium equations, the stress-strain constitutive relation, the boundary conditions, and the fluid-solid coupling equations.
- (1)
Geometric nonlinear equations
The study about the strain is the key objective of solid mechanics. The formulation of strain components is highly correlated with the physical deformation of the object studied. When studying a problem of relative large deformation, there exists six basic strain components for each point in the nonlinear elastic body, denoted as following:
where
,
,
,
,
and
are 6 basic strain components for each point in the nonlinear elastic body.
- (2)
Equilibrium equations
Inside the elastic body, if the deformation is relatively large, then the relationship between the external force acting on it and the internal force of the elastic body will be very complicated. When the deformation amplitude is fixed, the equilibrium equations can be formulated as:
where
is the normal stress,
is the shear stress, and
is the body force.
- (3)
The stress-strain constitutive relation
The stress-strain constitutive relationship can be denoted as the following formulation:
where
is the first strain invariant and
E is the modulus of elasticity.
- (4)
Boundary conditions
Boundary conditions are of great importance in the numerical simulation of the fluid-solid coupling cases. Different boundary conditions lead to totally different simulation results. In this paper, it is assumed that there exists force at the surface of the object, then the stress boundary conditions at the interface can be denoted as follows:
where
,
and
are the surface force components, and
,
and
are the cosine of the out direction normal values.
- (5)
The fluid-solid coupling equations
In the fluid-solid coupling calculation, it is needed to obey the corresponding conservation principles. The following equations need to be obeyed at the interface:
where
is the stress,
d is the displacement,
q is the heat flux, and
T is the temperature.
The above are the conservation equations when conducting the fluid-solid coupling analysis. These equations can be solved by setting the required parameters, the corresponding initial conditions, the boundary conditions. There exists two different kinds of solution methods: the direction method and the separation method. The direct method involves the solution of the following equations:
where
k is the iteration time step,
,
and
are respectively the system matrix, to be solved values and the outsider forces in the flow field.
,
and
are respectively the system matrix, to be solved values and the outsider forces in the solid field.
and
are the fluid-solid coupling matrix.
As the direct solution method involves the synchronous solution of the fluid and solid, there will not be any time lag. However, in real solution process, it is relatively hard for realizing the synchronous solution of the CFD and CSM technique. Meanwhile, the synchronous solution does not show any effect in the convergence of solving the equation. The difference between the separation method and the direct method is that the above mentioned controlling equations won’t be needed. The solution for the controlling equation of fluid and solid are conducted separately. The whole solution process involves only the exchange of the solution results of the fluid field and the solid field. Meanwhile, the separation method involves less computer resources and is applied widely in the fluid-solid coupling calculations.
5. Conclusions
This paper studies the aerodynamic performances of different forms of airfoils including the pseudo 3D adaptive airfoil, the real 3D adaptive airfoil and the fish skeleton airfoil. The following conclusions can be drawn:
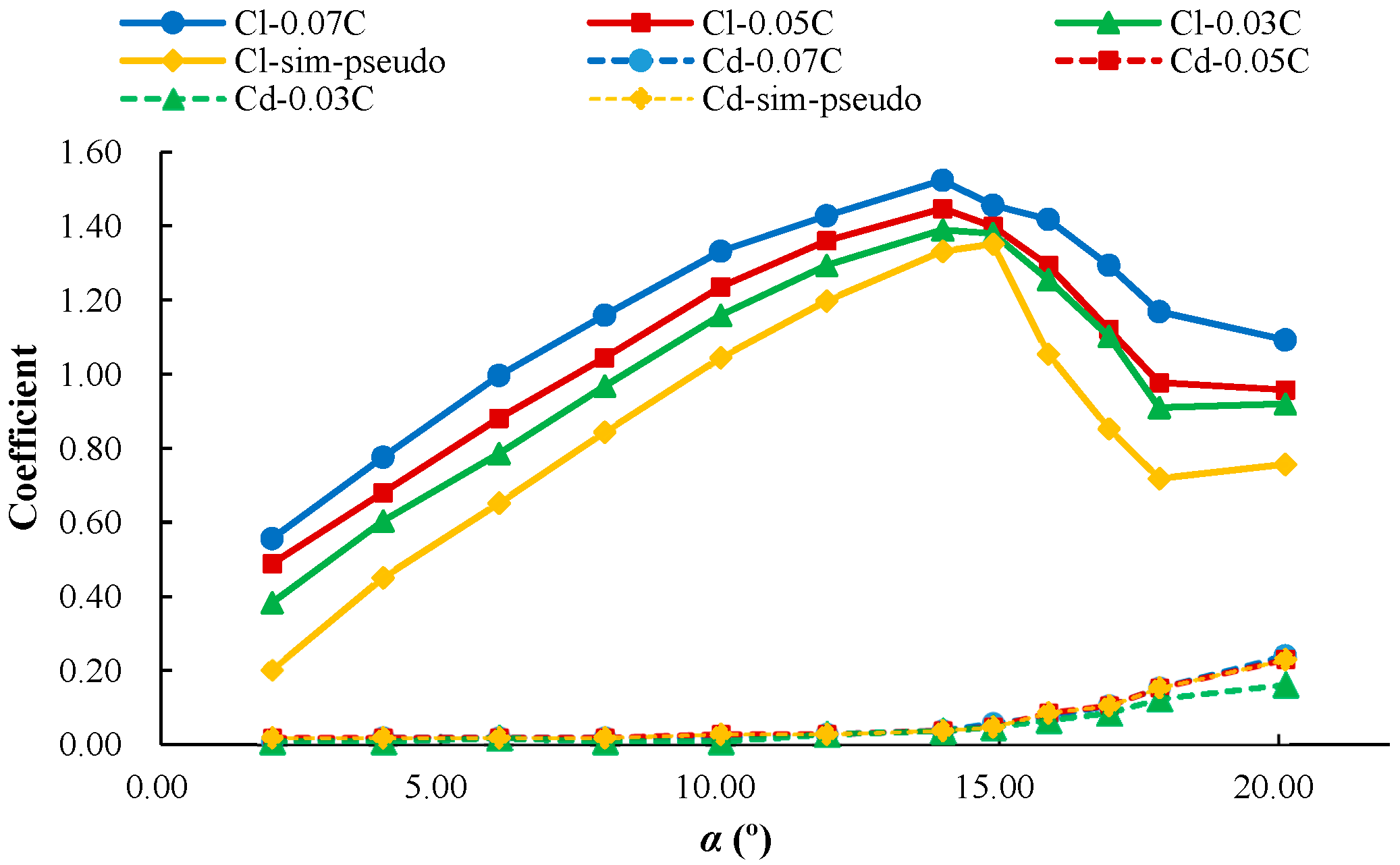
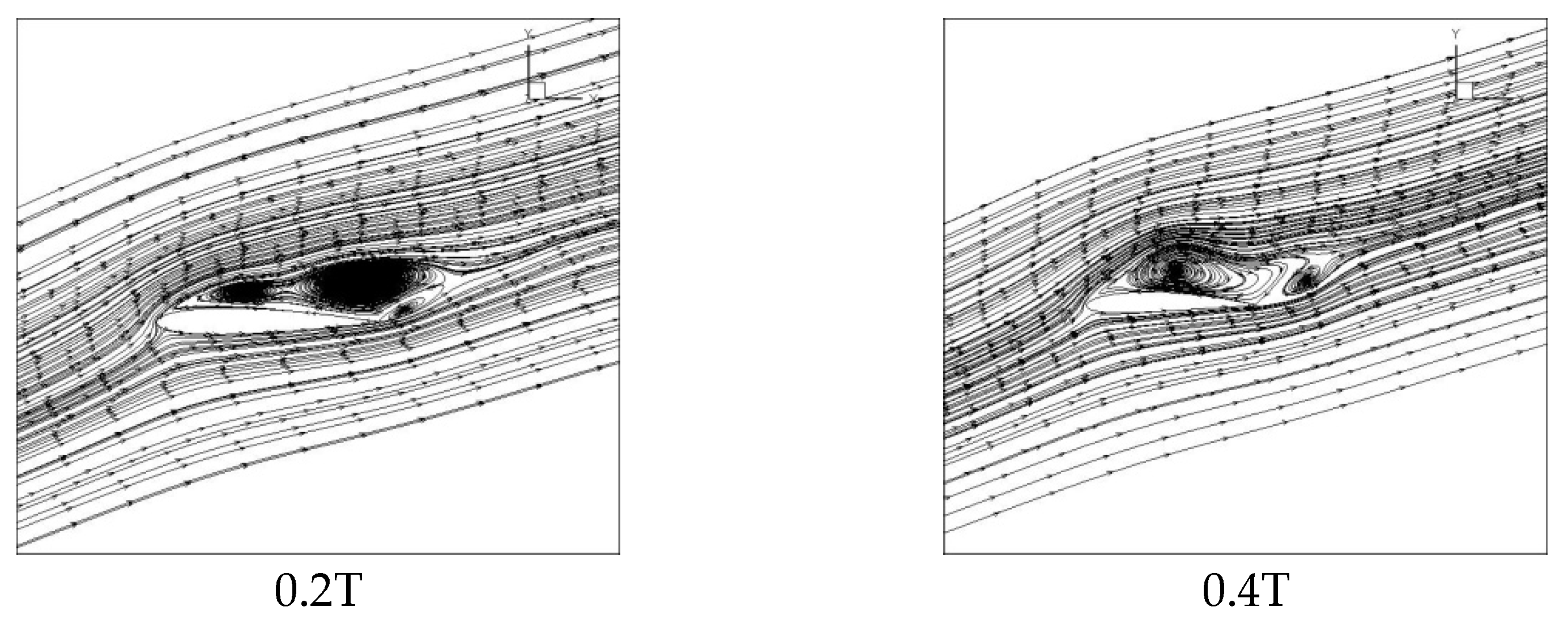
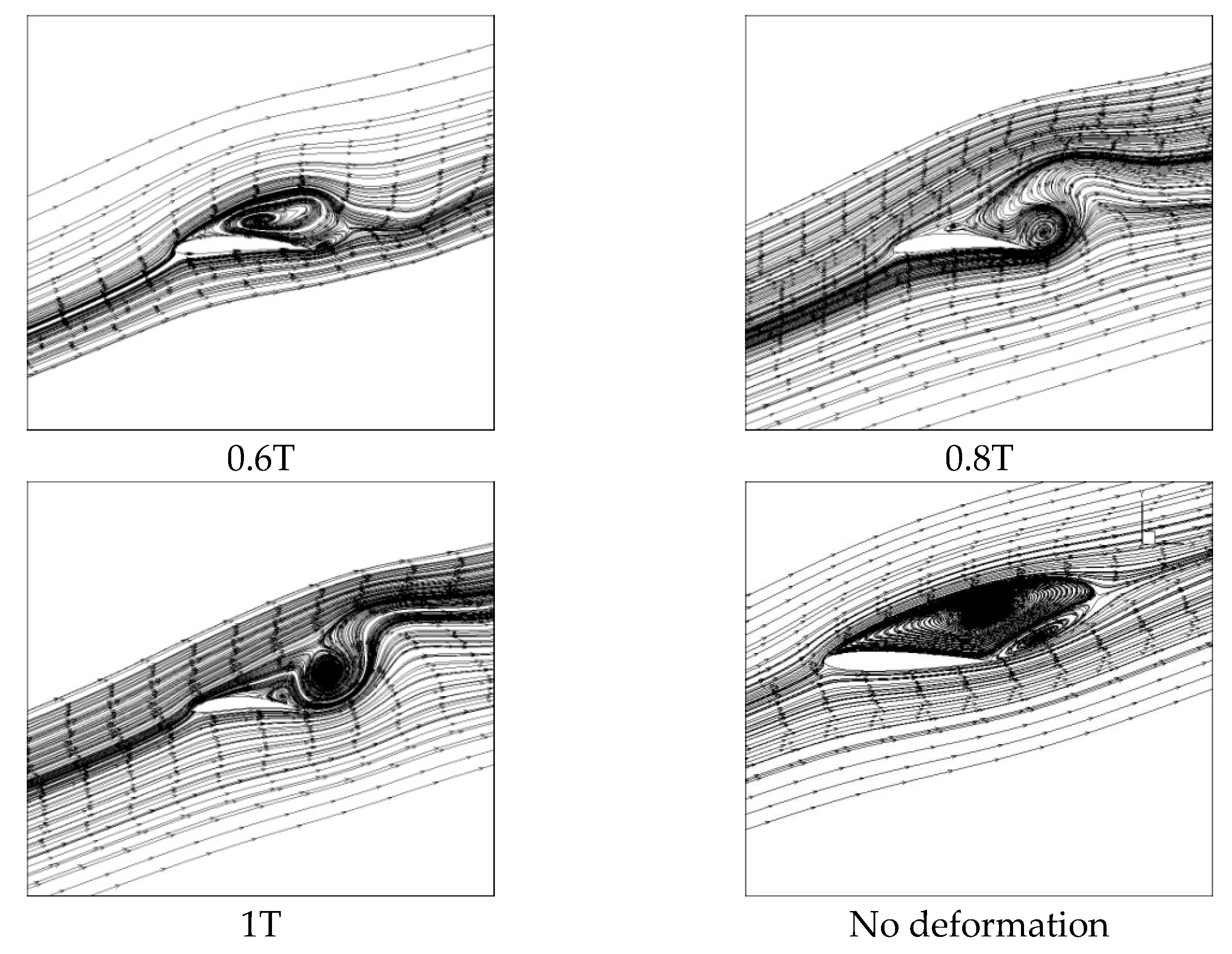
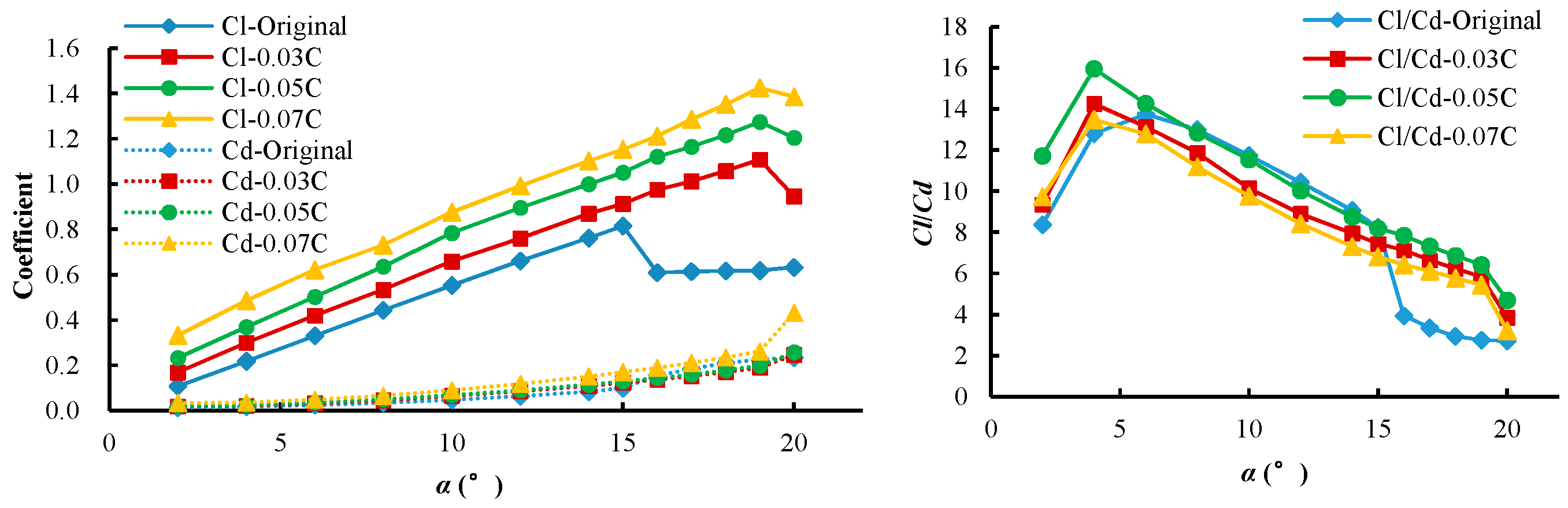
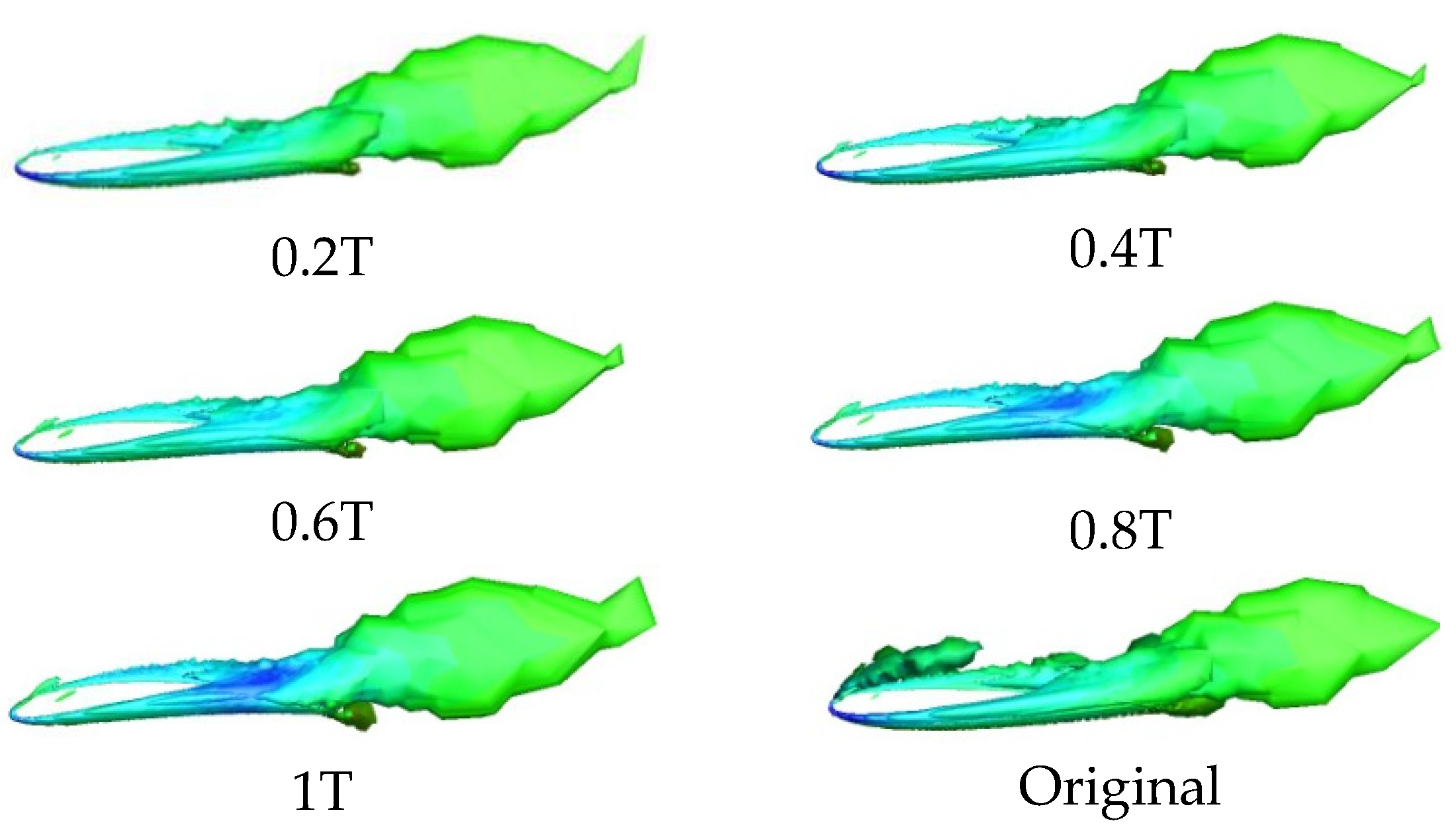
Firstly, with the increase of the angle of attack, for the pseudo 3D NACA0012 airfoil with the airfoil maximum deformation amplitude of 3%, 5% and 7% of the chord length, the lift coefficients firstly increase and then decrease. The lift coefficients of these deformed airfoils are all bigger than that of the original airfoil. At the same angle of attack, bigger the maximum deformation amplitude, higher the lift coefficient. The pseudo 3D NACA0012 airfoil reduces the scale of the surface vortex in some extend when compared with that of the deformed airfoil. When the maximum deformation amplitude reaches 0.05c, the best vortex controlling effect can be achieved and the airfoil demonstrates good aerodynamic performance.
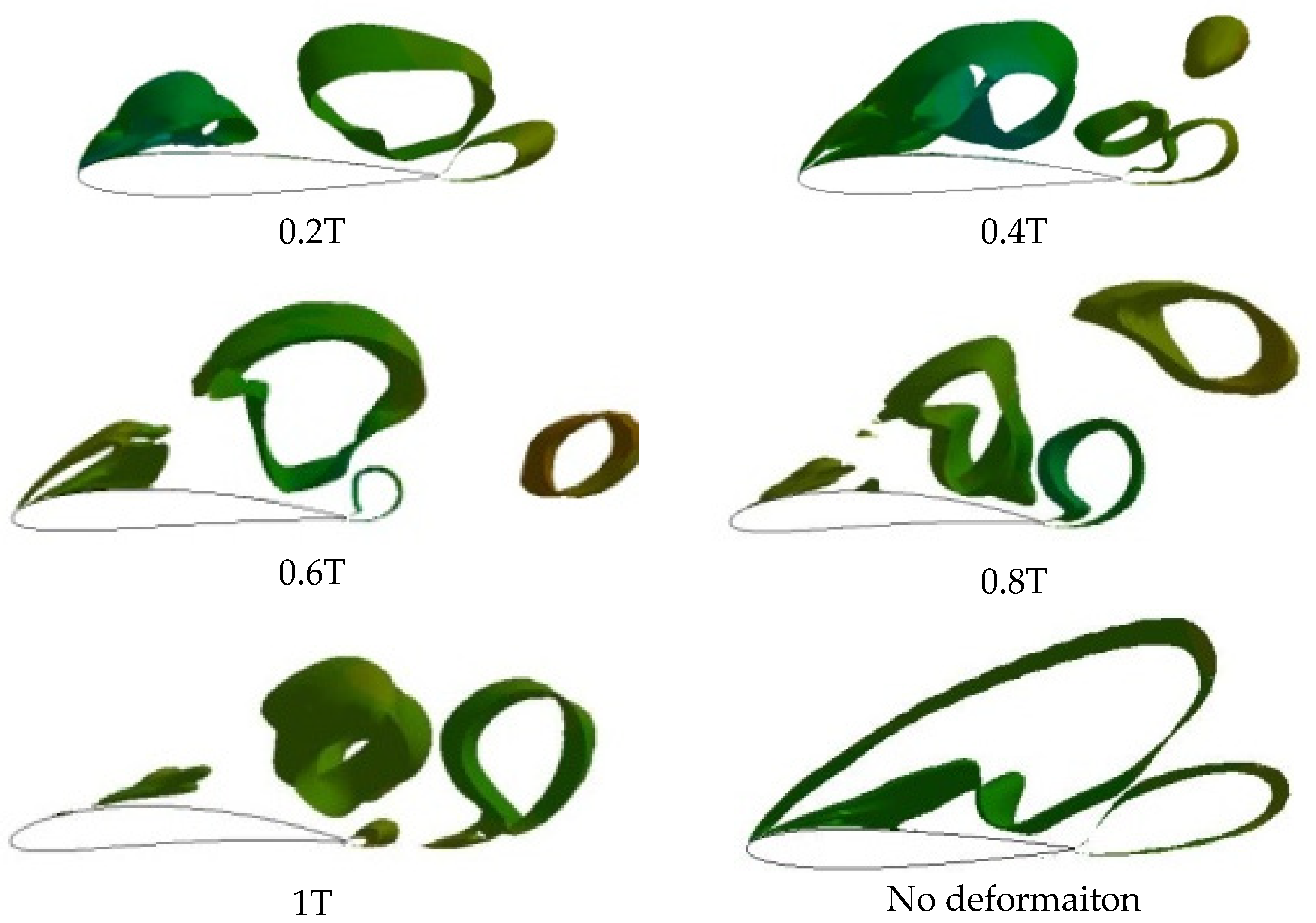
Secondly, with the increase of the angle of attack, the lift coefficients of the real 3D NACA0012 airfoil at the maximum deformation amplitude of 3%, 5% and 7% of chord length firstly increase and then decrease. All of these airfoils have a higher lift coefficient than the original airfoil. The 3D vortex figure demonstrates that the deformable airfoil has a better vortex generation controlling effect at the middle cross-section along the spanwise direction than the non-deformable airfoil.
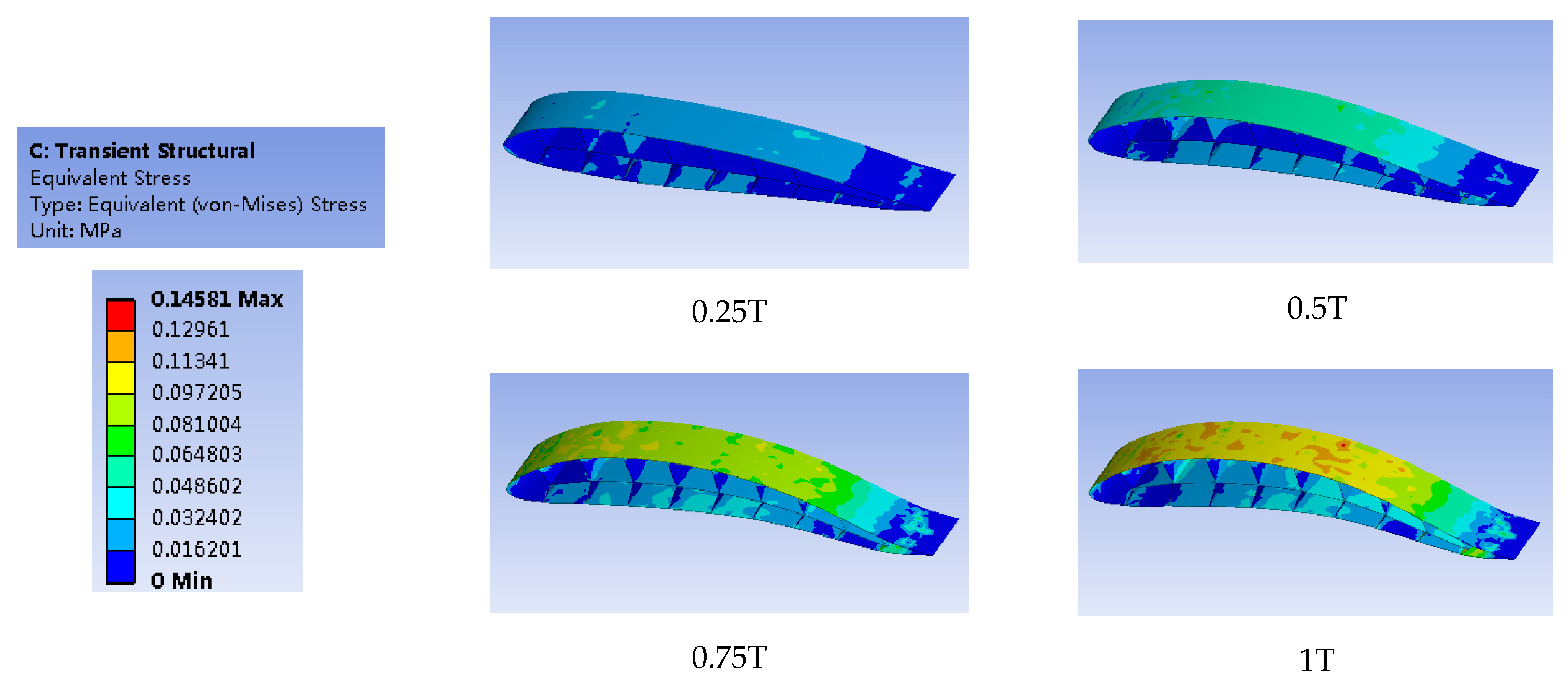
Thirdly, a new fish skeleton-like airfoil based on the NACA0012 airfoil has been proposed. At the angle of attack of 18°, the aerodynamic performance of the fish skeleton like airfoil with the Young’s modulus of 1 Mpa and 2 Mpa have been studied by using the fluid-solid coupling method. Results show that the passive deformation airfoil shares nearly the same characteristics as the active deformation airfoil. With a smaller Young’s modulus value, a smaller stress for the airfoil surface is tended to achieve, thus leading to a better aerodynamic performance. Therefore, this kind of new fish skeleton-like airfoil is expected to improve the aerodynamic performance of the VAWT and also augment its energy extraction efficiency performance.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}