
Behavioral Modeling Paradigm for DC Nanogrid Based Distributed Energy Systems

 ,
, 
Abstract
:1. Introduction
- To develop behavioral models for PEC integrated into a dc nanogrid-based DES, for system level analysis.
- To incorporate the effect large signal disturbances (i.e., sudden load changes and intermittent behavior of RES) in the operating conditions.
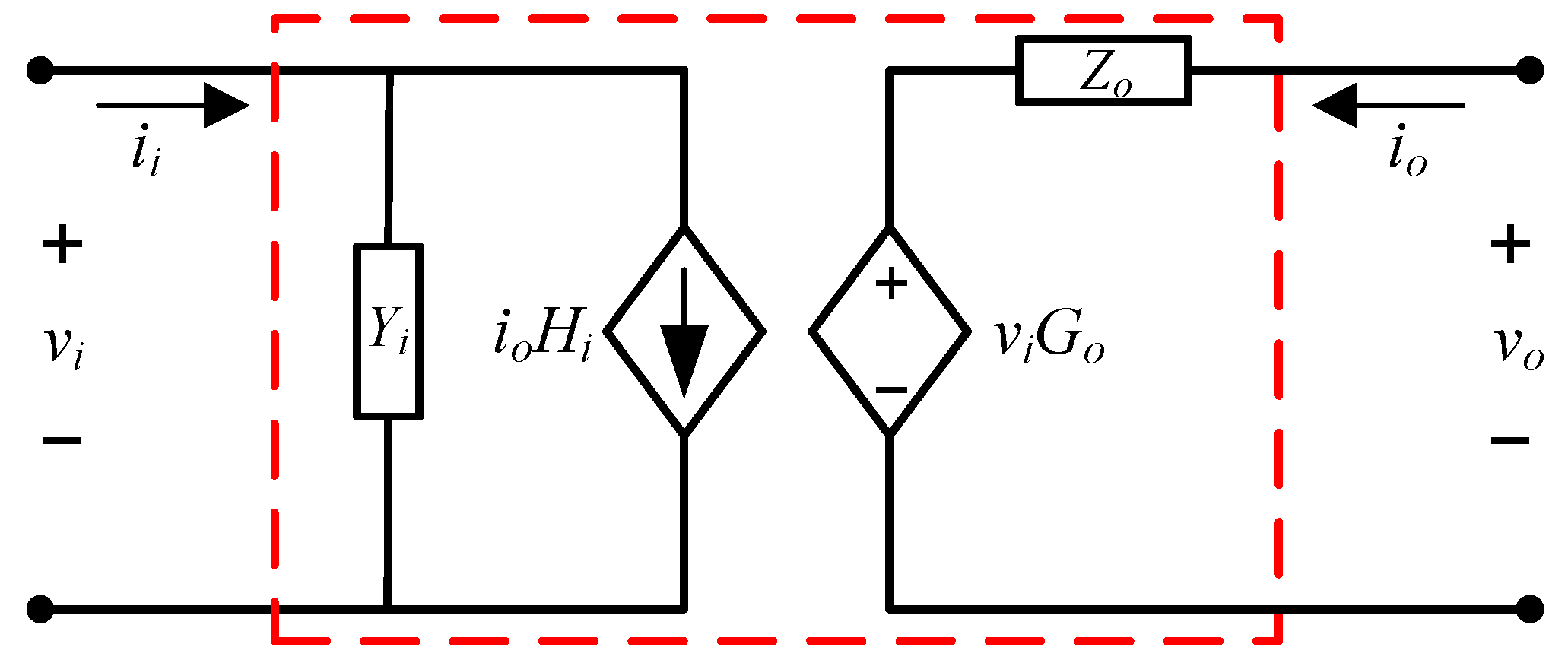
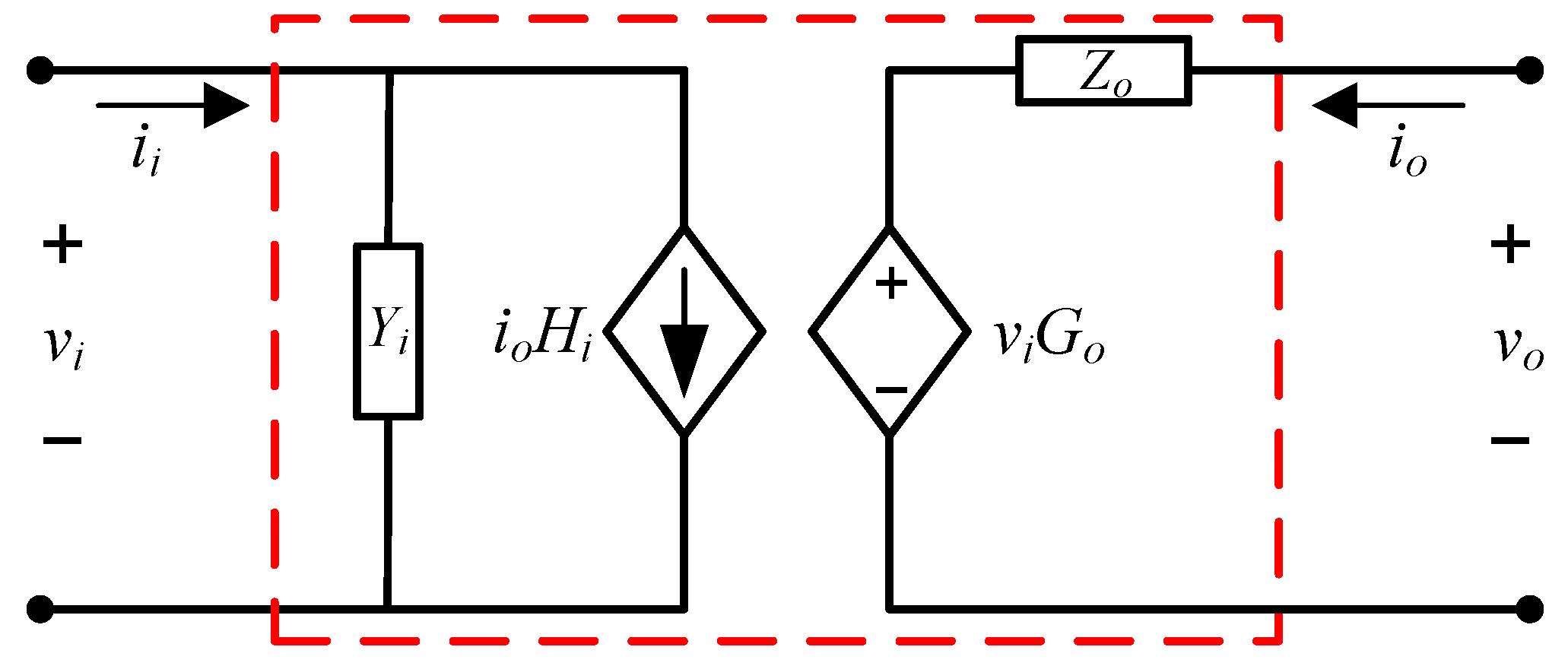
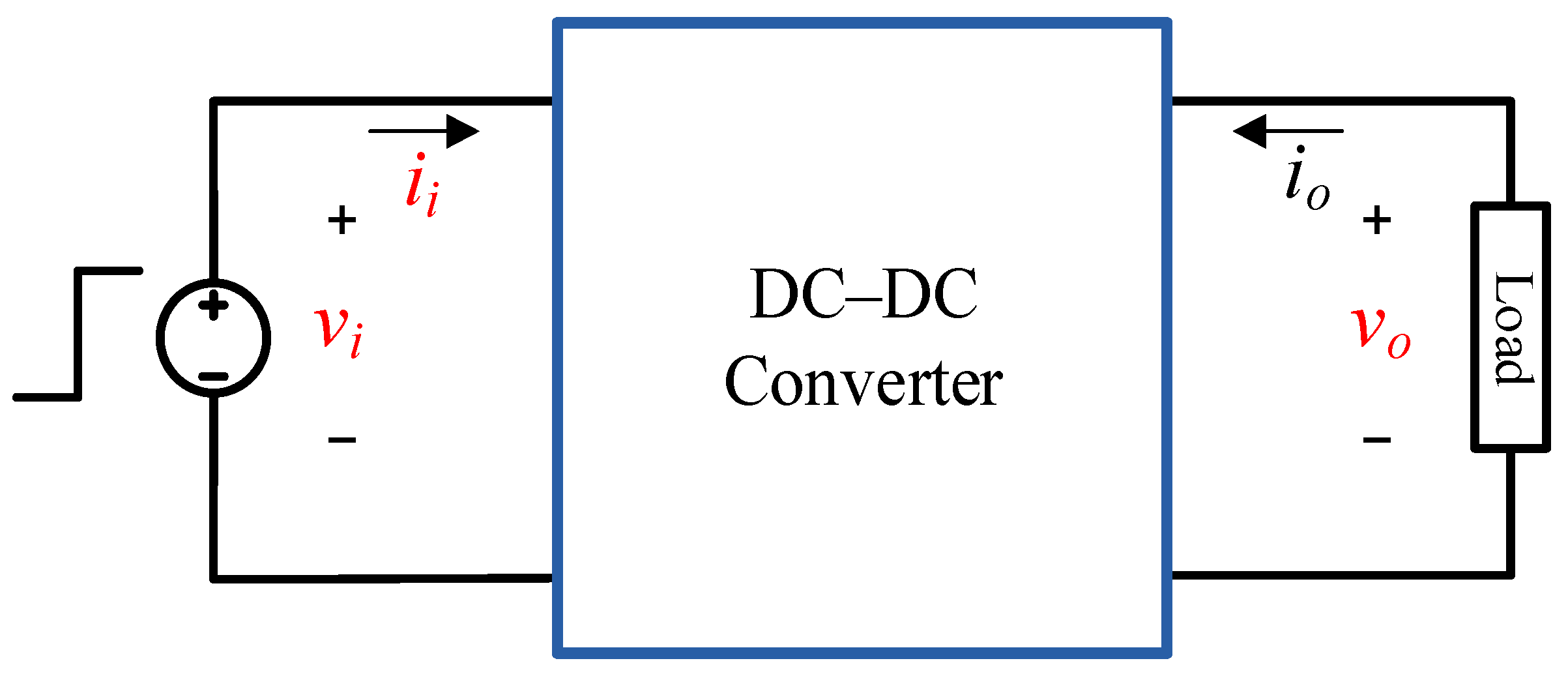
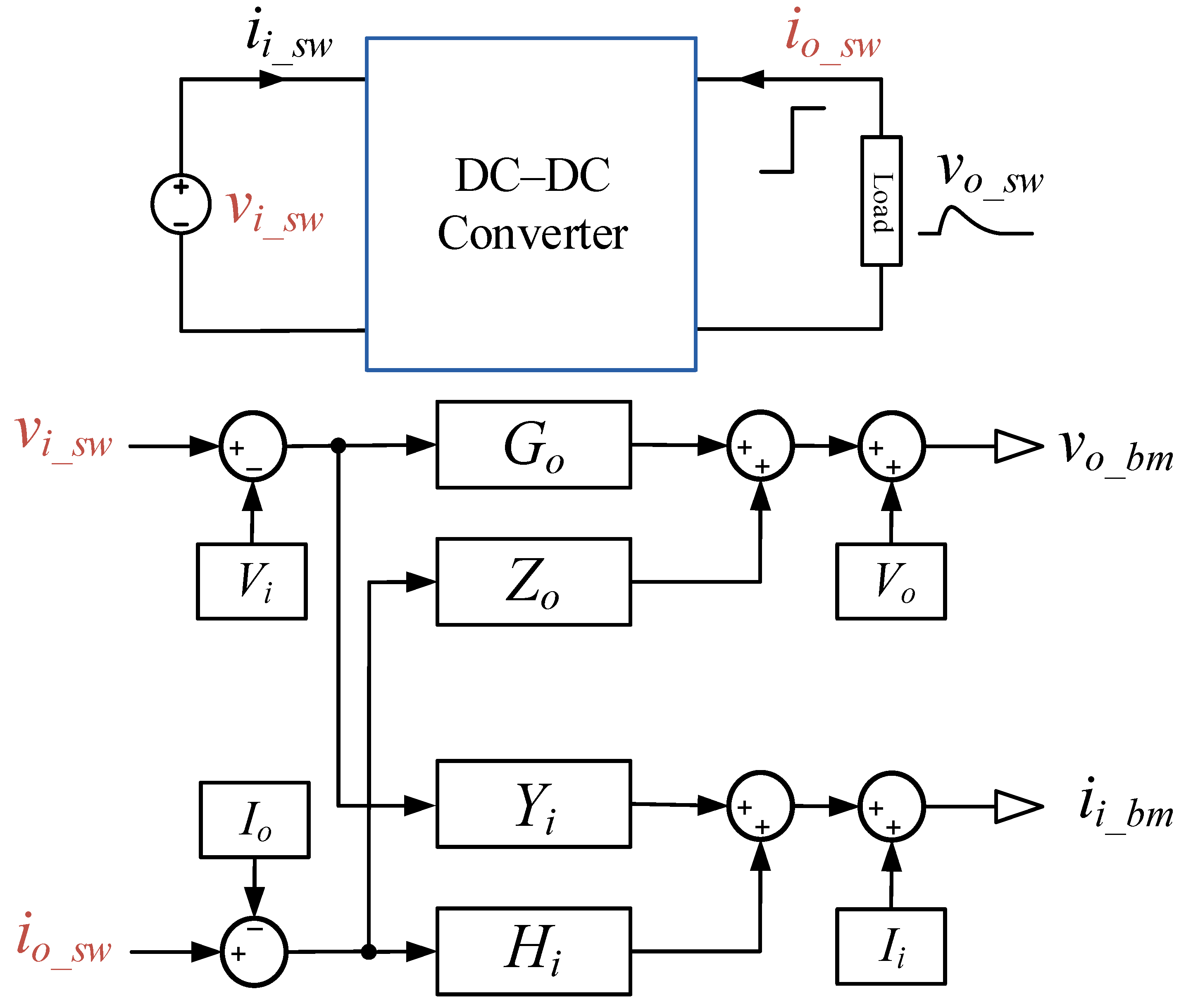
2. Behavioral Modeling for Power Electronic Converters
2.1. Acquisition of Measurement Data
2.2. Behavivoral Model Verification
2.2.1. Model Verification for DC–DC Converter
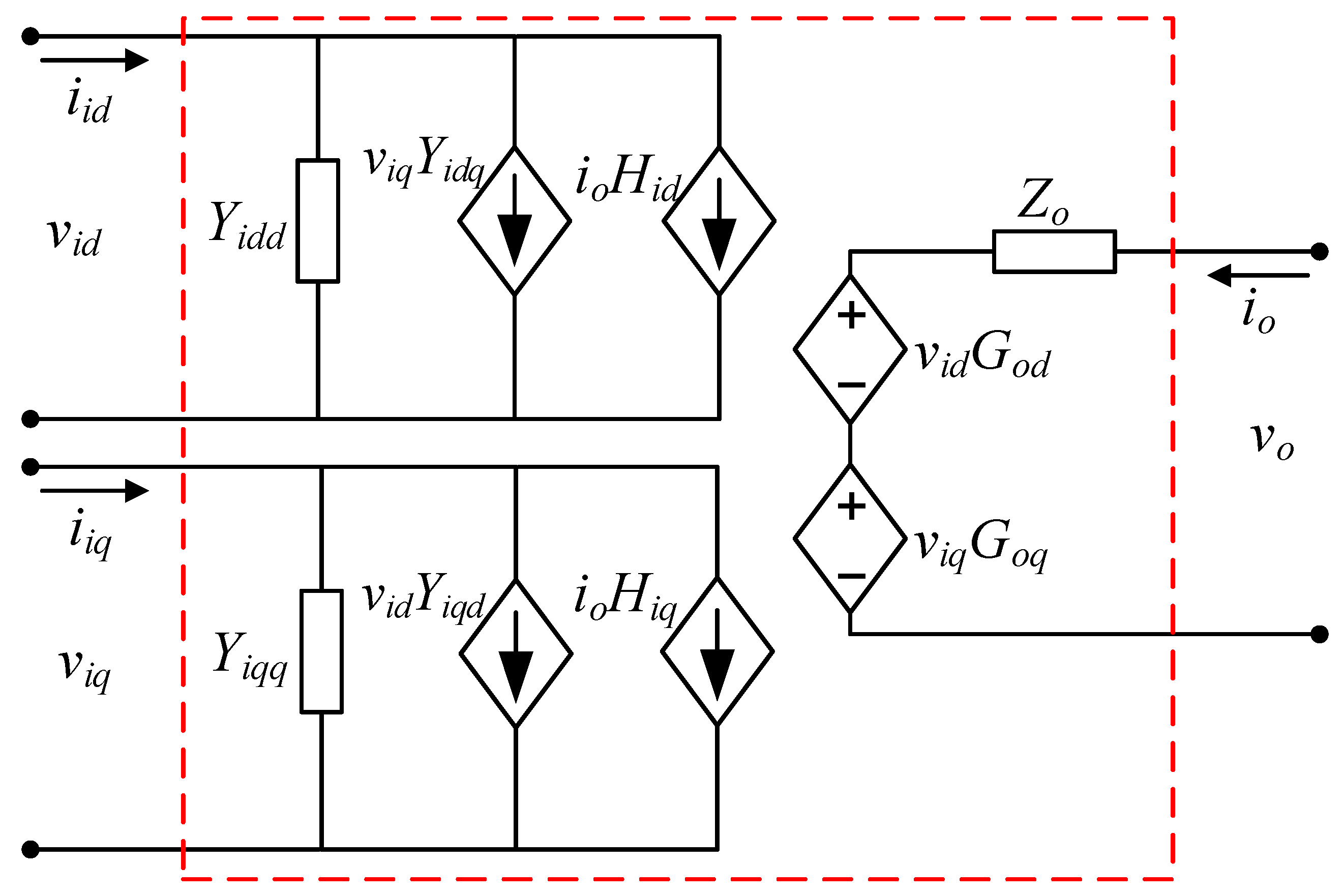
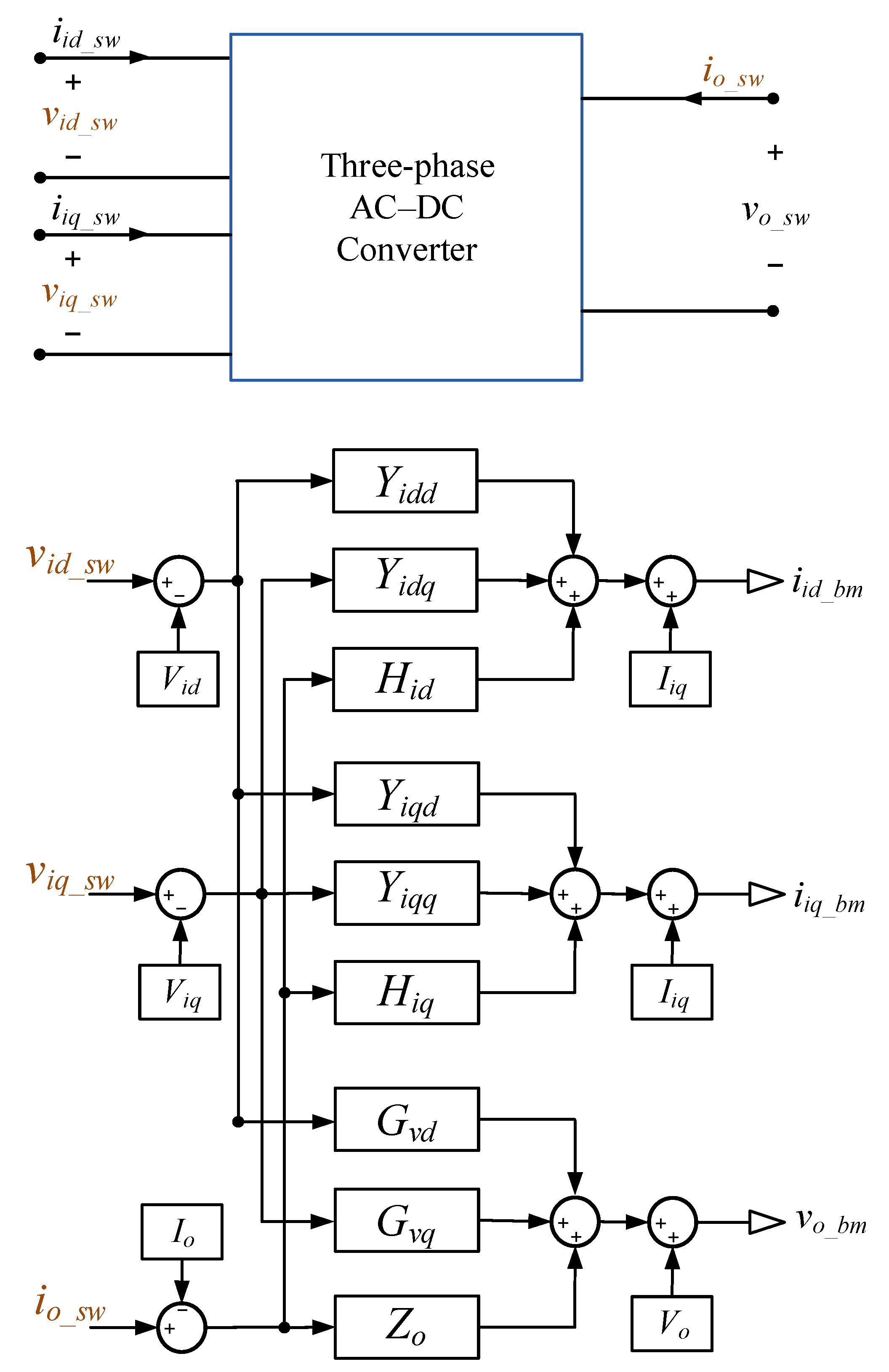
2.2.2. Model Verification for Three-Phase AC–DC Converter
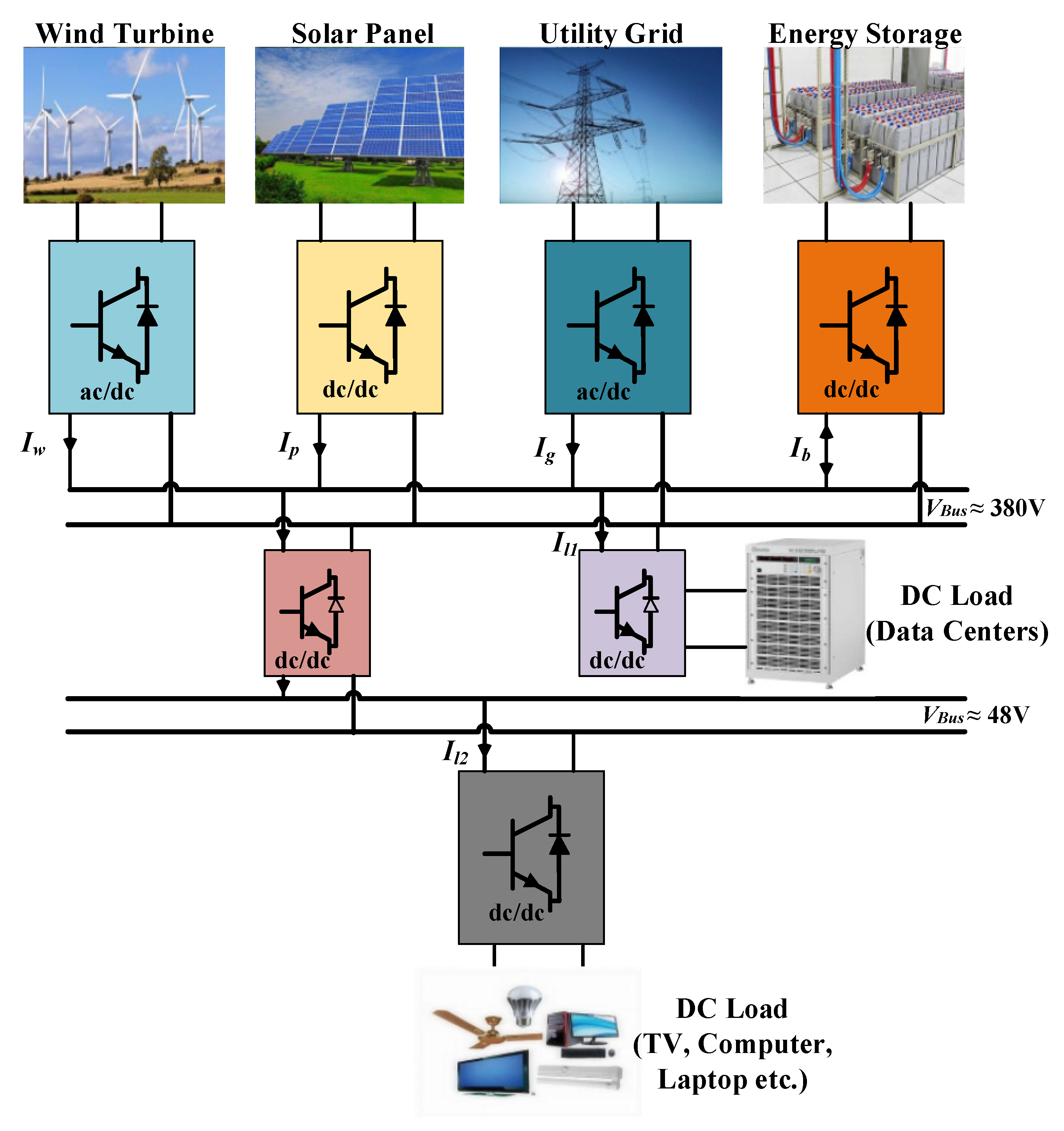
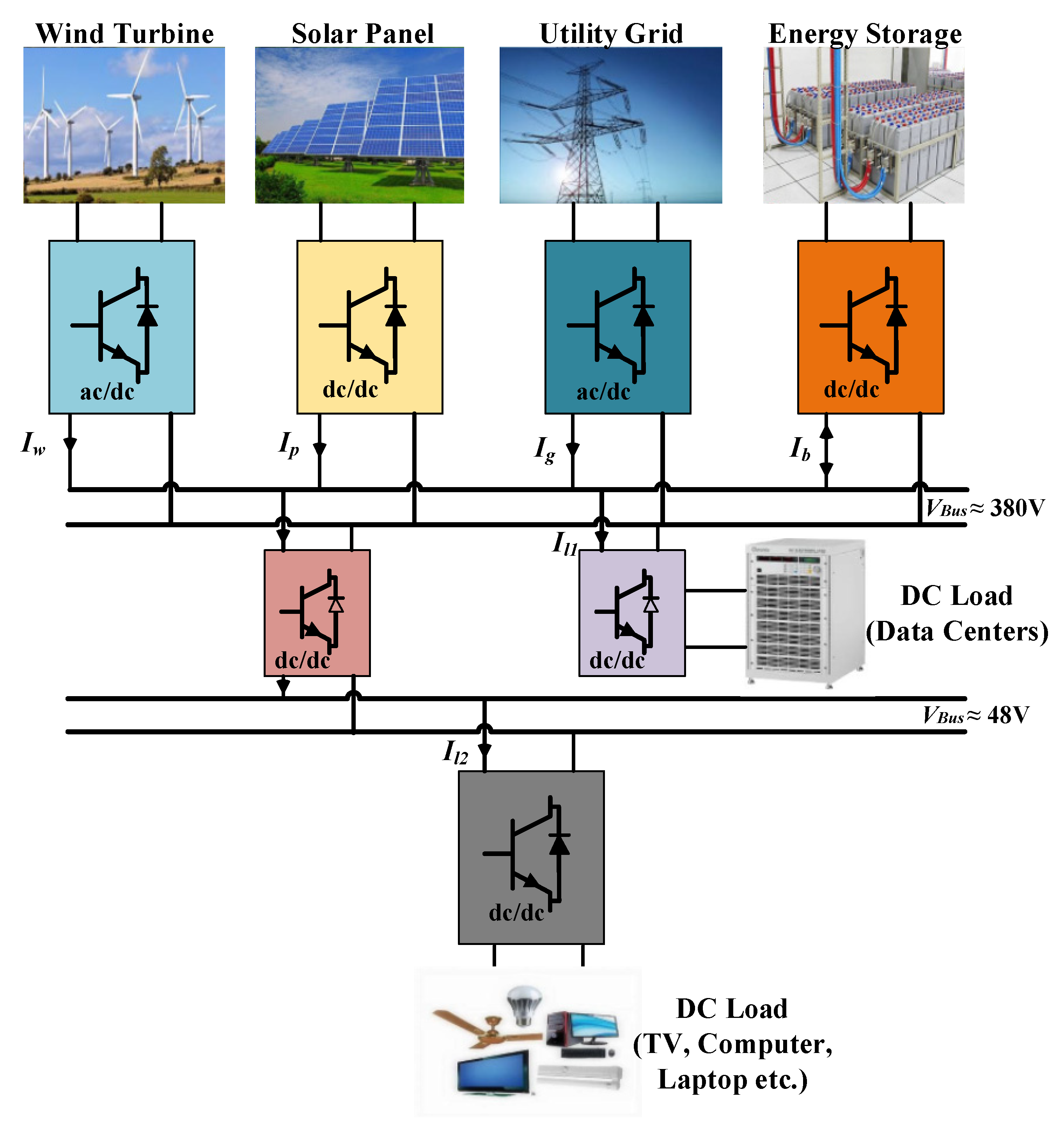
3. DC Nanogrid-based Distributed Energy System
3.1. Model Verification
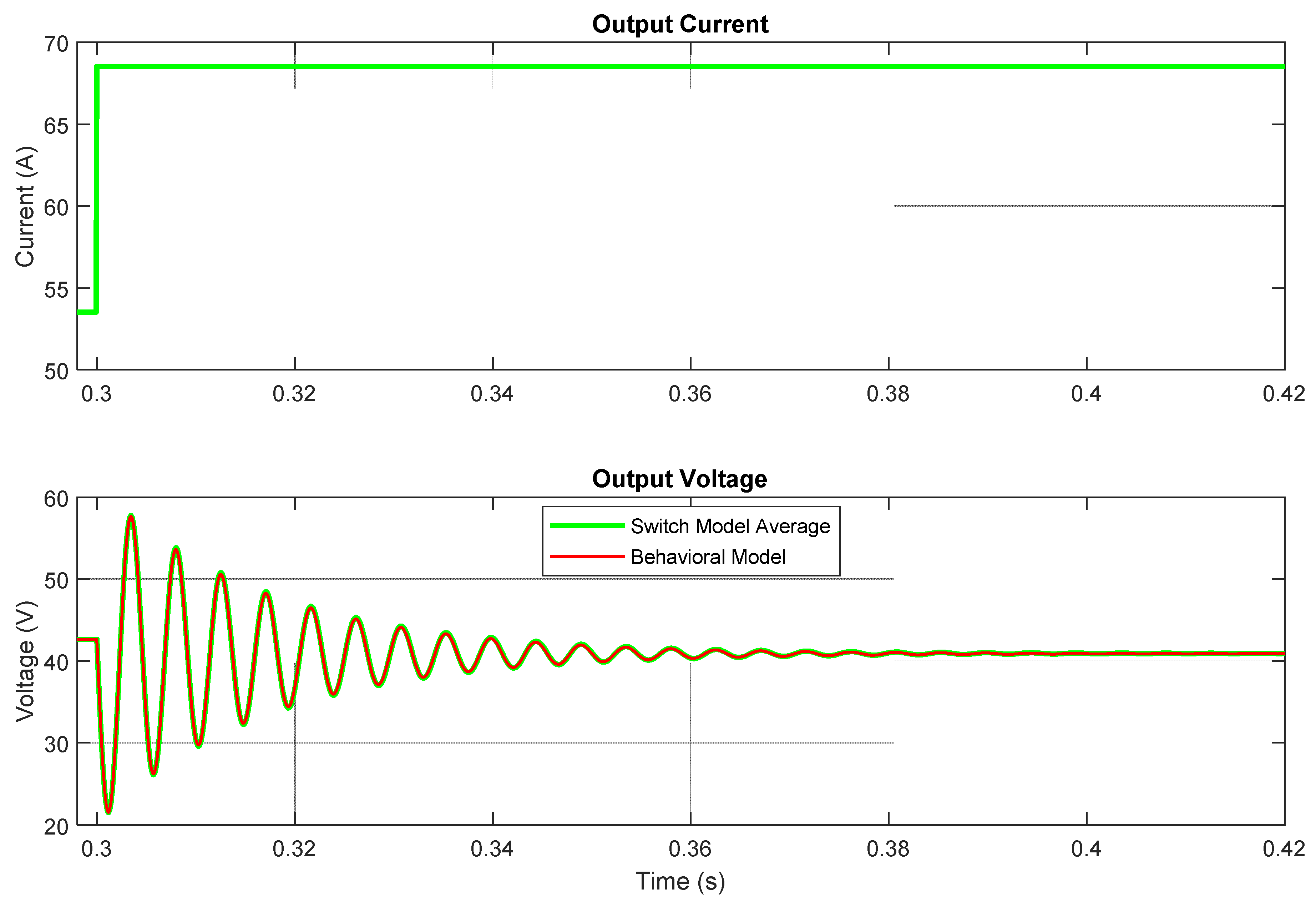
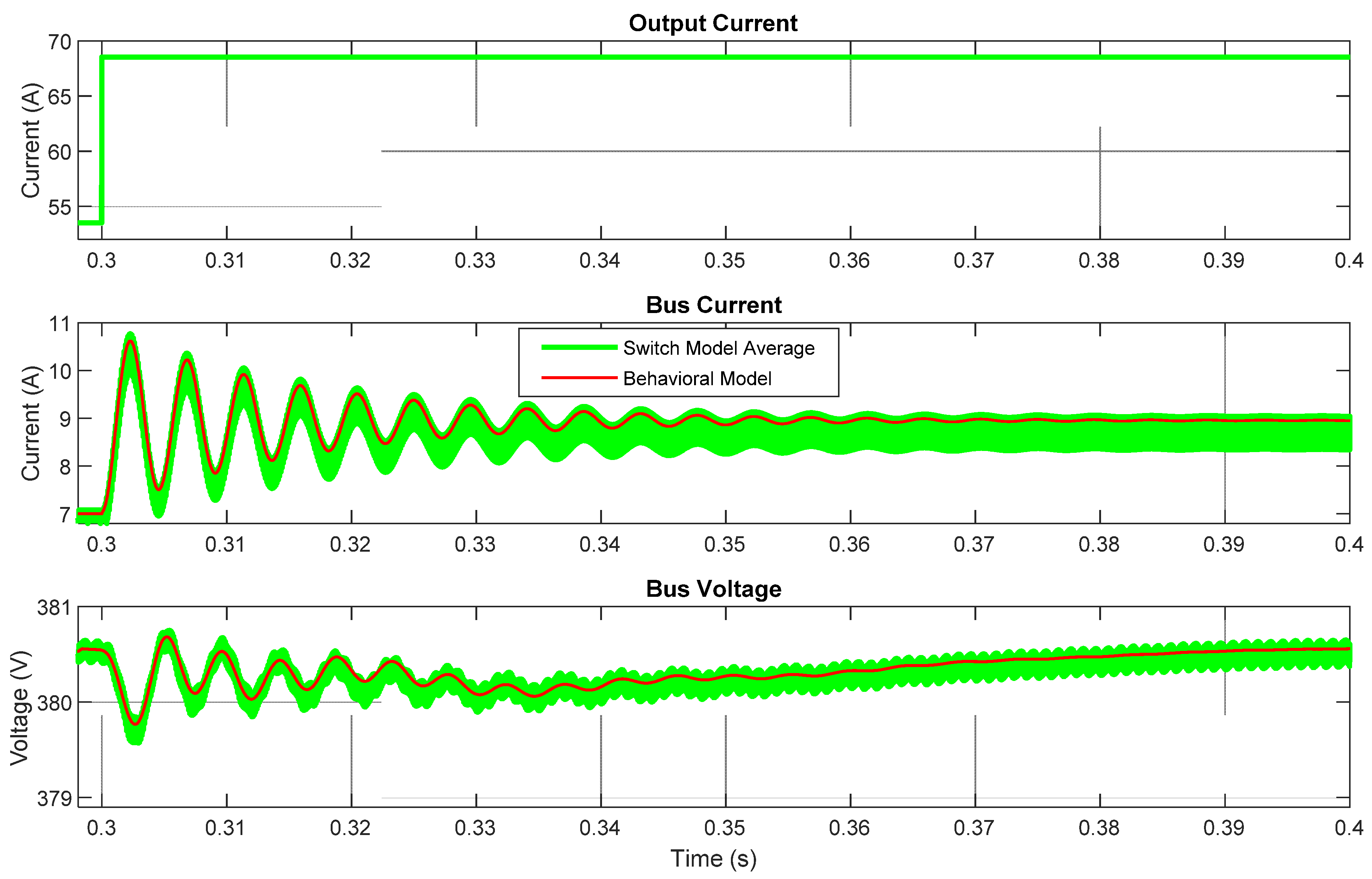
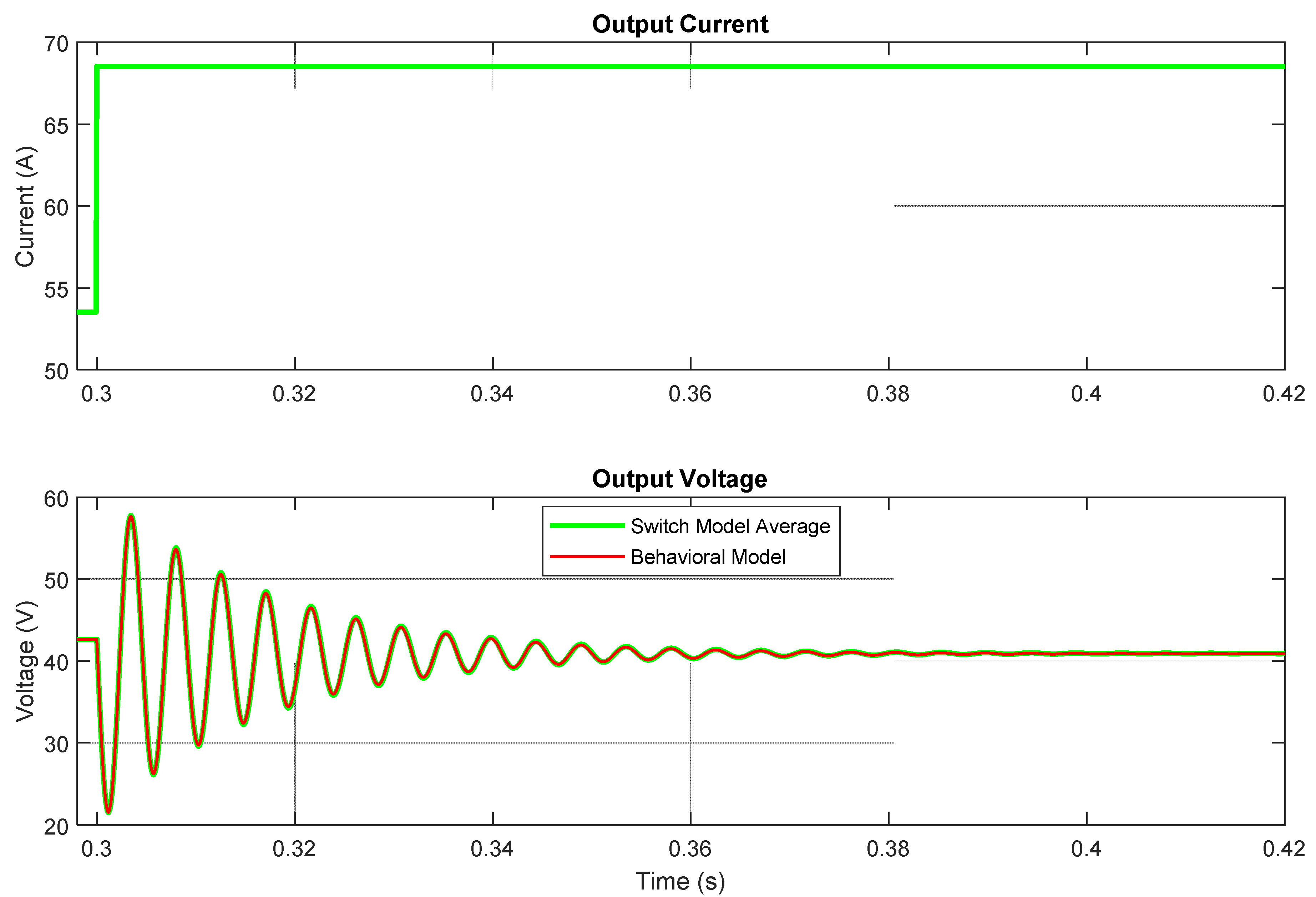
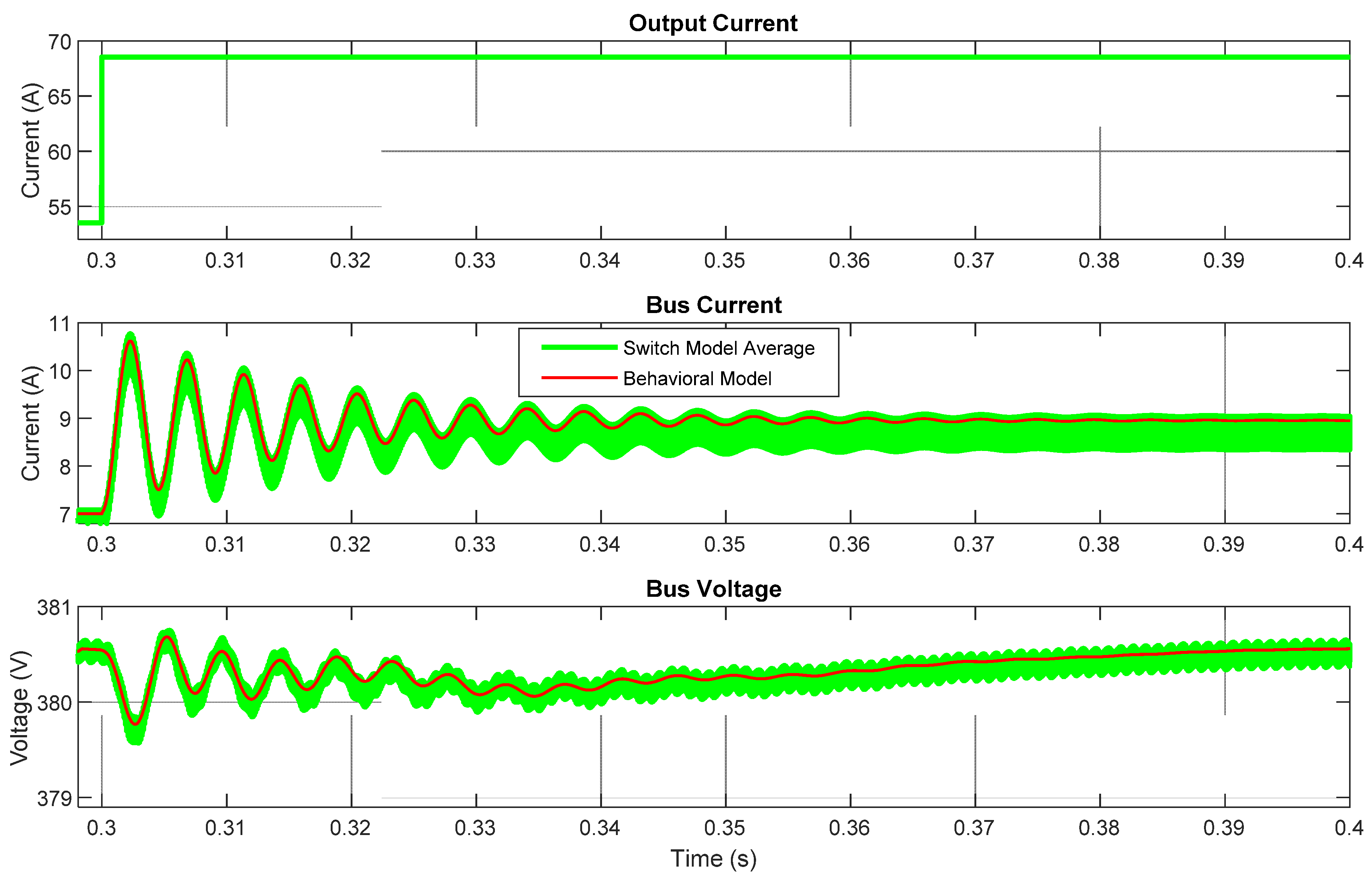
3.1.1. Output Current Step Test
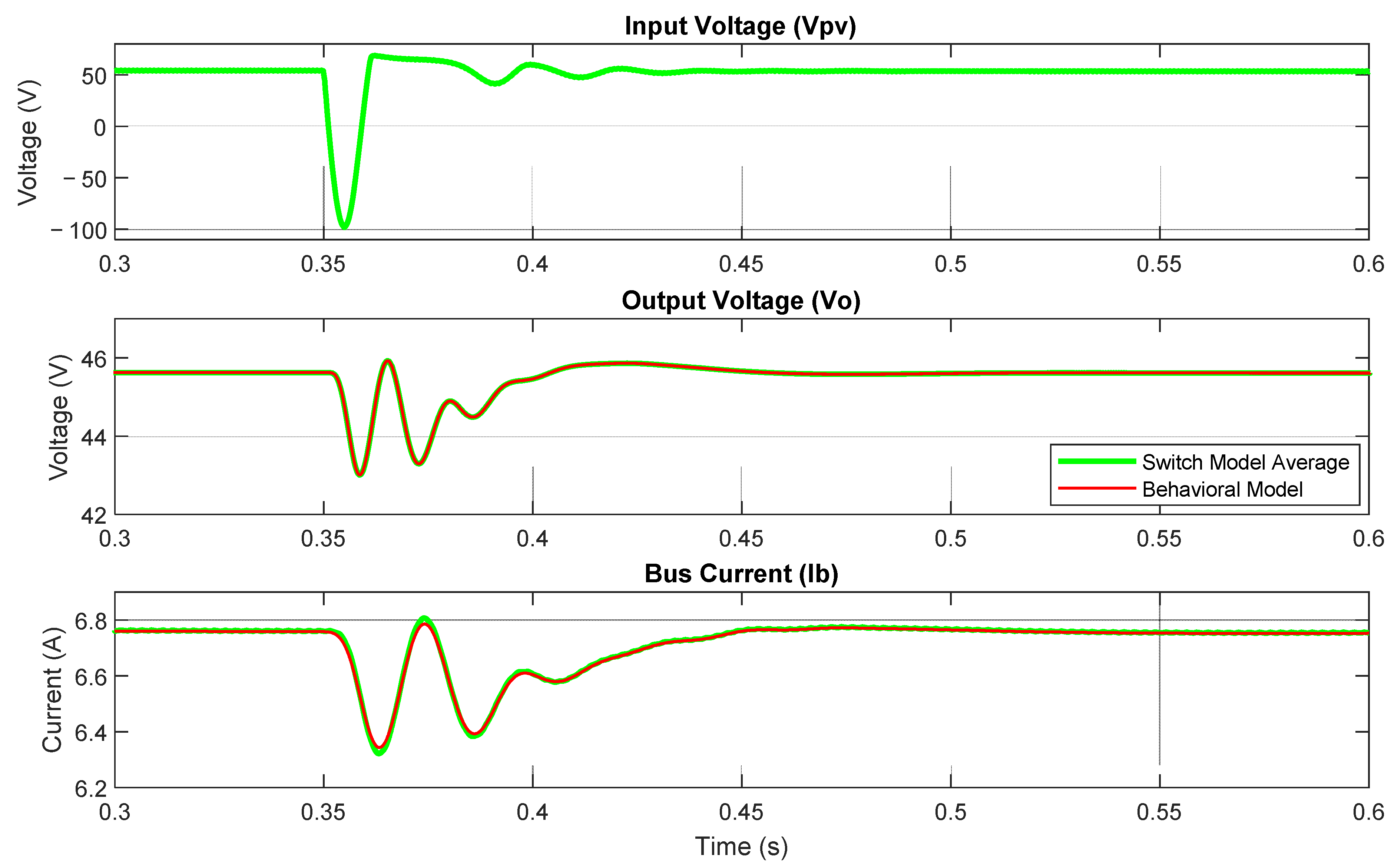
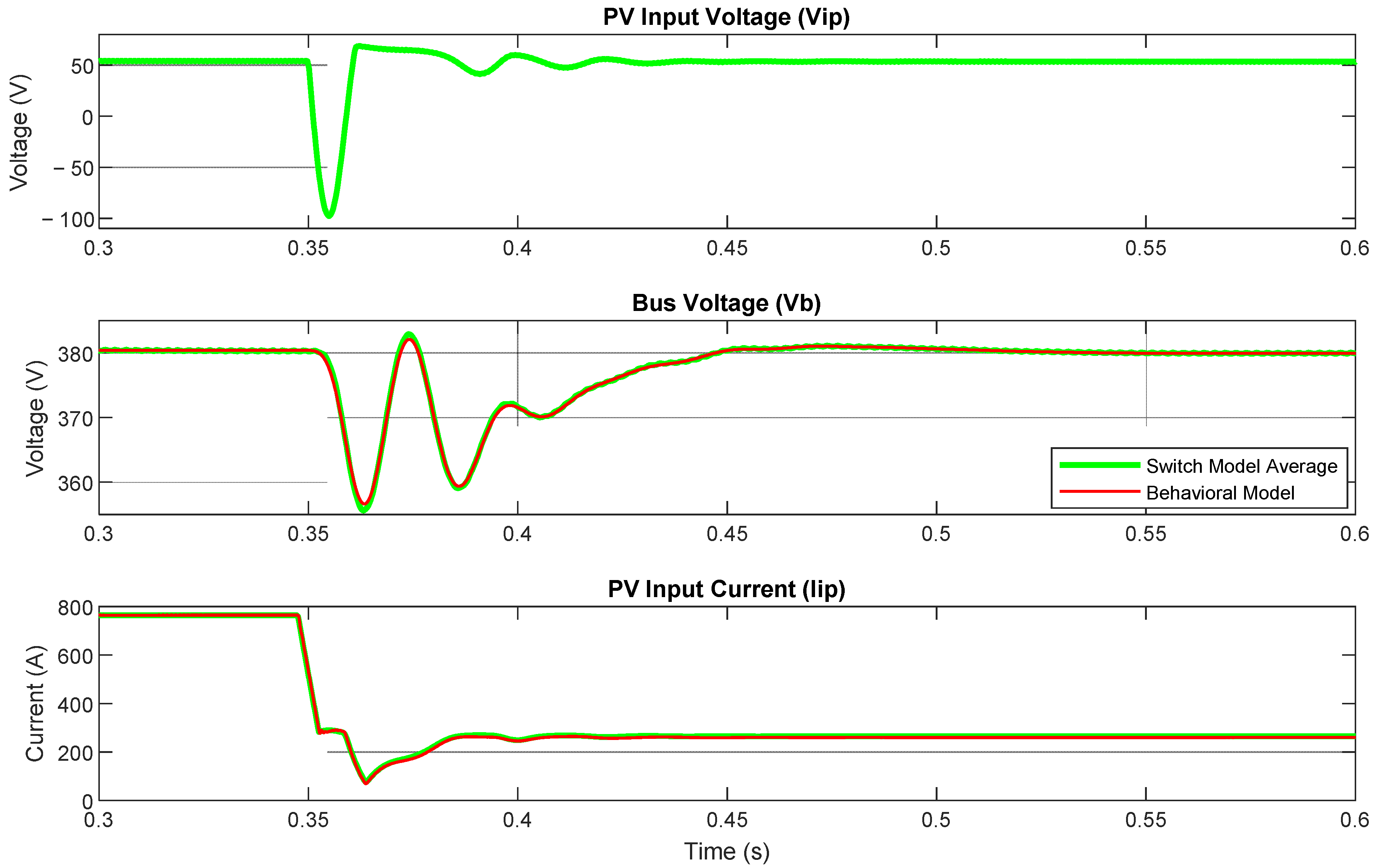
3.1.2. PV Input Current Step Test
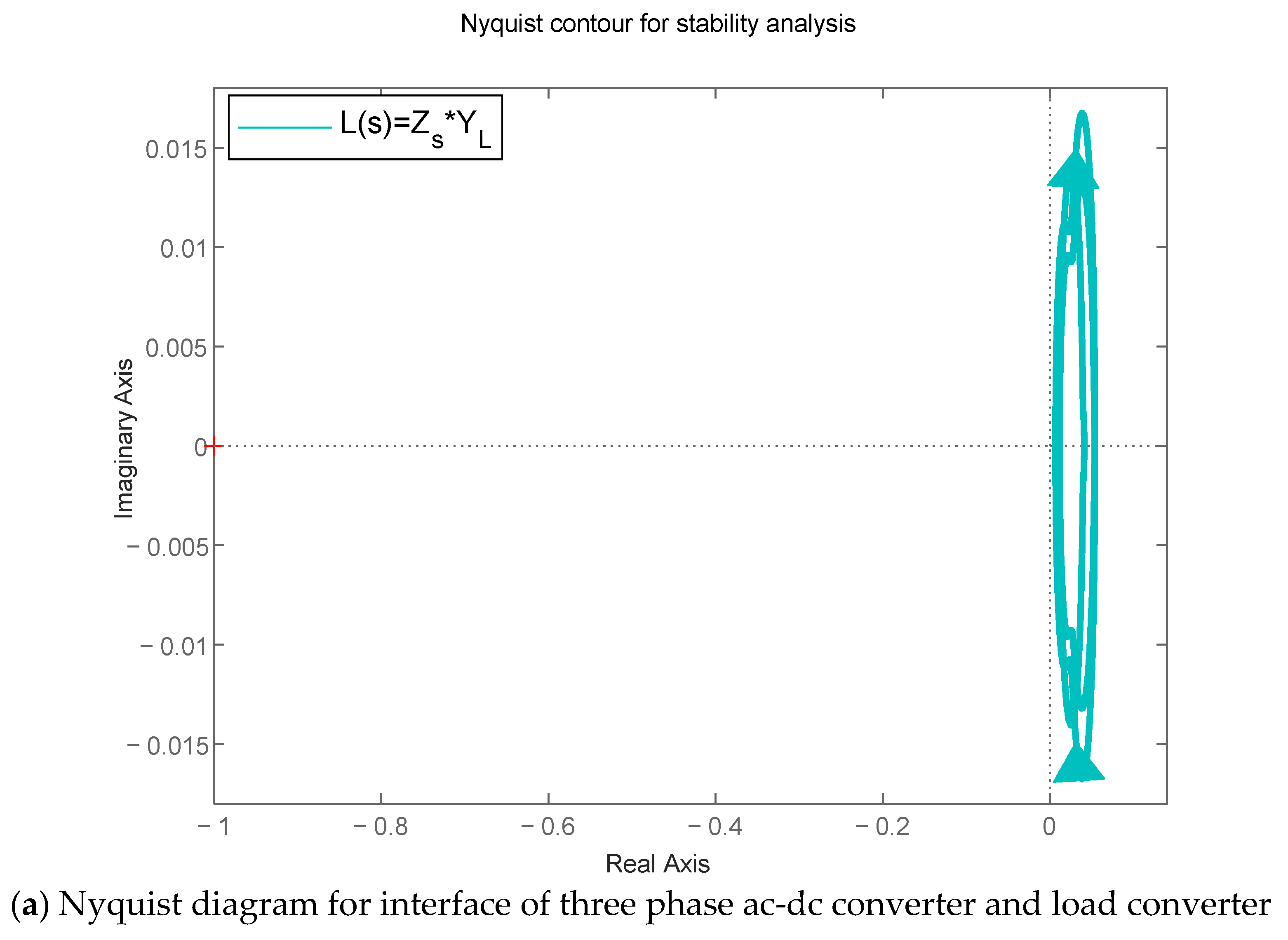
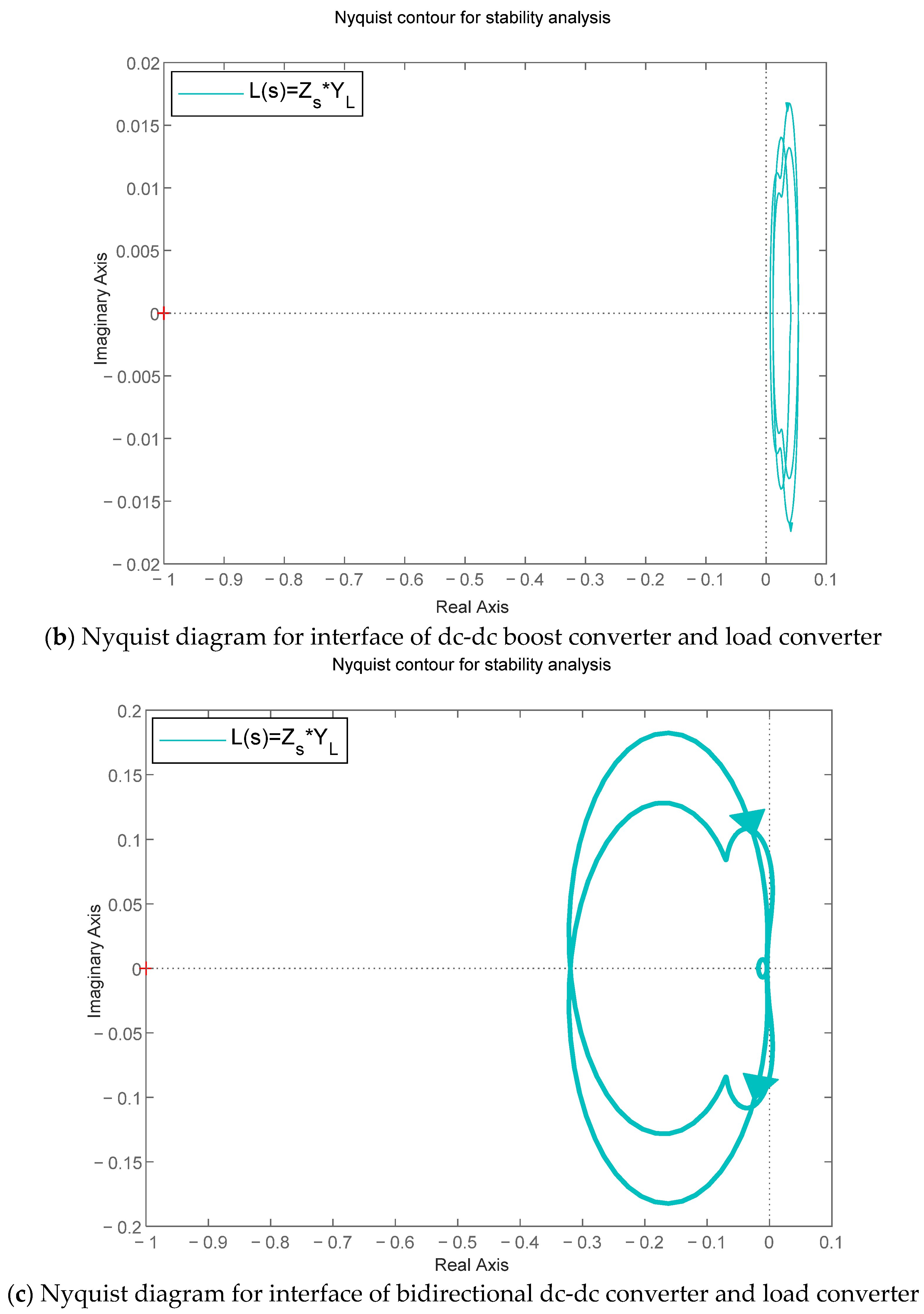
3.1.3. Stability Analysis of dc Nanogrid-Based DES
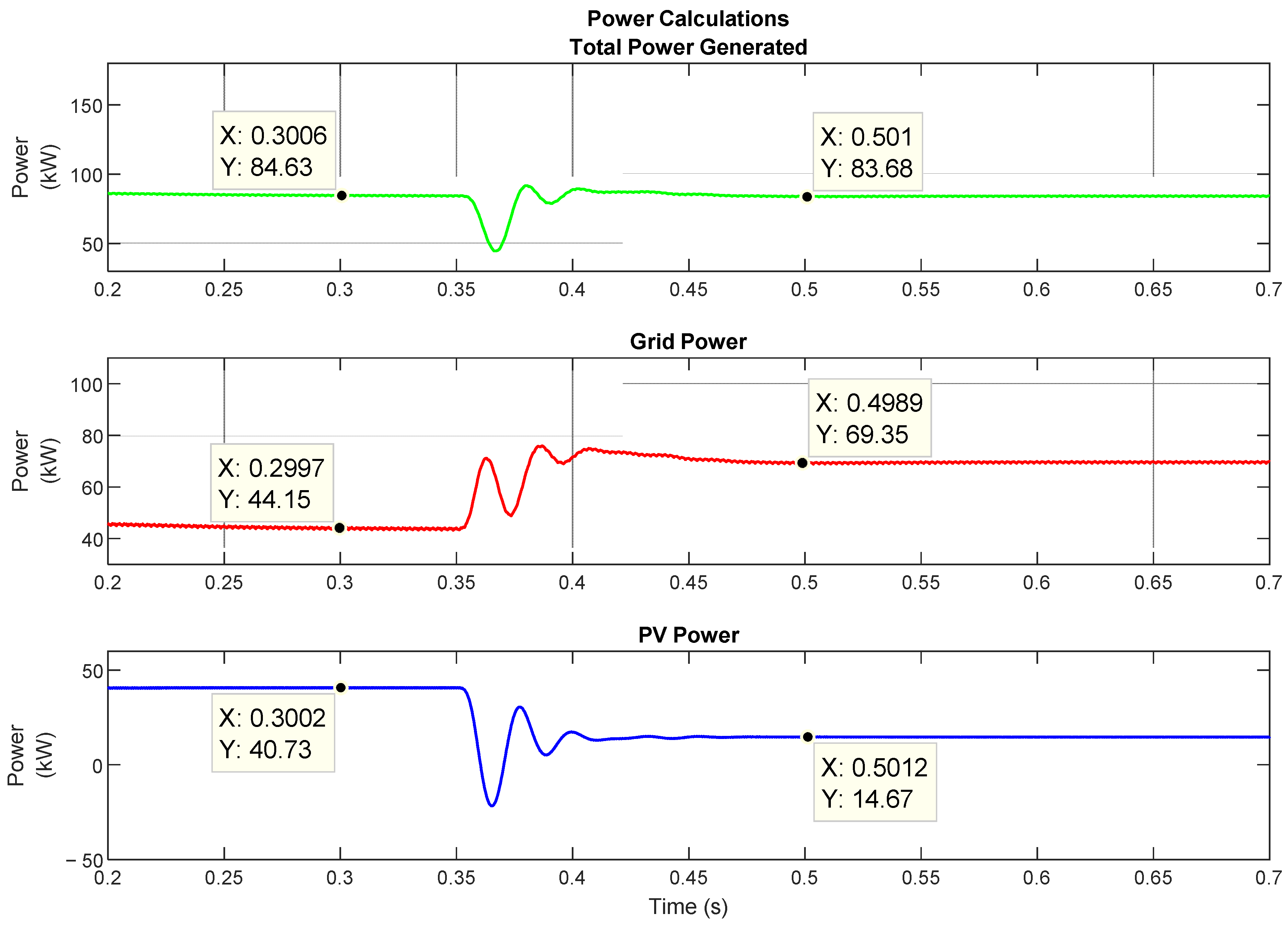
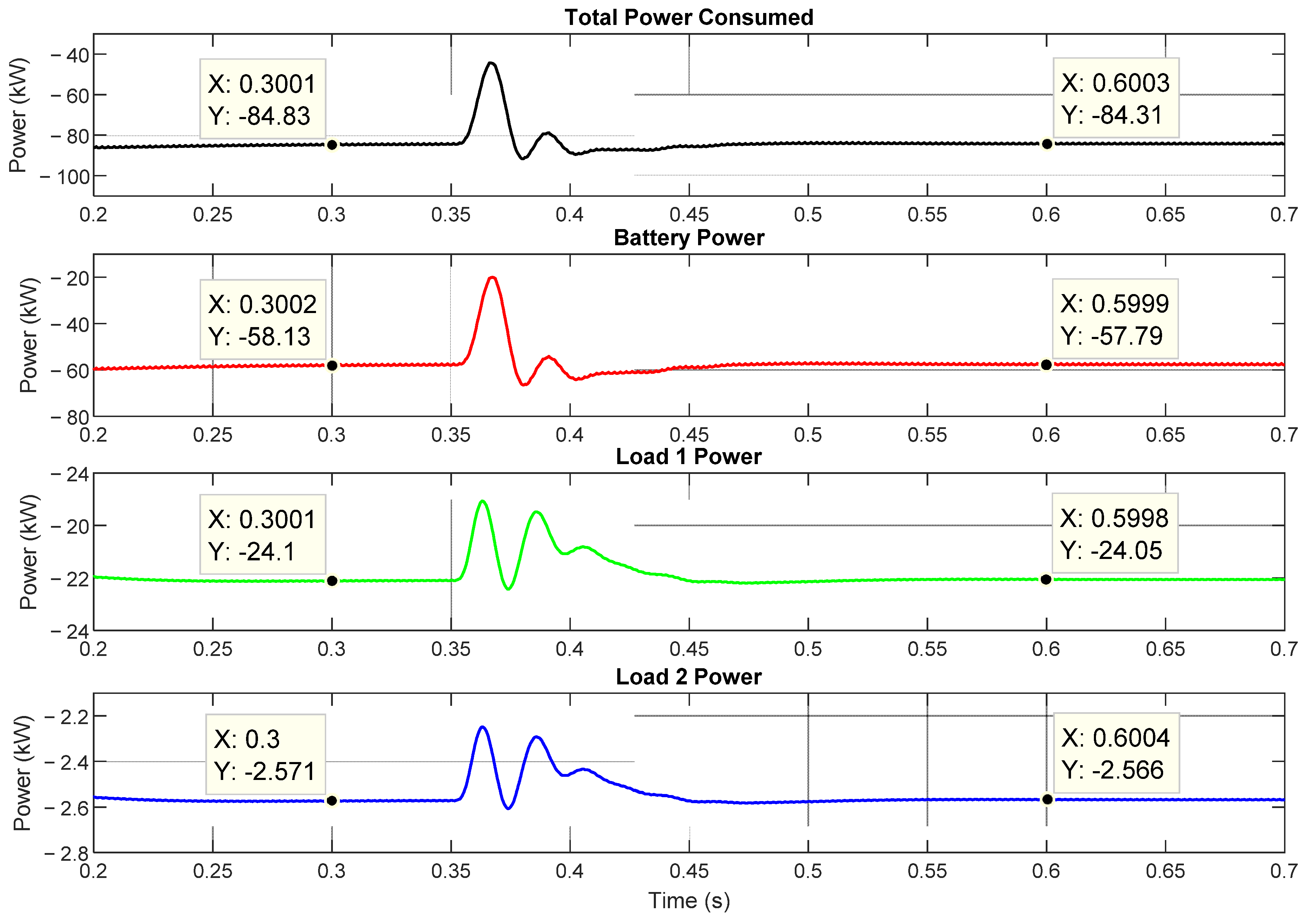
3.1.4. Power Measurements
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, X.; Hu, S. Distributed generation placement for power distribution networks. J. Circuits Syst. Comput. 2015, 24, 1550009-1–1550009-23. [Google Scholar] [CrossRef]
- Muthulakshmi, K.; Sasiraja, R.M.; Kumar, V.S. The proper location and sizing of multiple distributed generators for maximizing stability using PSO. J. Circuits Syst. Comput. 2017, 26, 1750057-1–1750057-20. [Google Scholar] [CrossRef]
- Senguttuvan, S.; Vijaykumra, M. Solar photovoltaic system interfaced shunt active power filter for enhancement of power quality in three-phase distribution system. J. Circuits Syst. Comput. 2018, 27, 1850166. [Google Scholar] [CrossRef]
- Kumra, D.; Zare, F.; Ghosh, A. DC Microgrid Technology: System Architectures, AC Grid Interfaces, Grounding Schemes, Power Quality, Communication Networks, Applications, and Standardizations Aspect. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Fotopoulou, M.; Rakopoulos, D.; Trigkas, D.; Stergiopoulos, F.; Blanas, O.; Voutetakis, S. State of the Art of Low and Medium Voltage Direct Current (DC) Microgrids. Energies 2021, 14, 5595. [Google Scholar] [CrossRef]
- Normark, B.; Shivakumar, A.; Welsch, M. DC Power Production and Consumption in Households. In Europe’s Energy Transition-Insights for Policy Making; Elsevier: Amsterdam, The Netherlands, 2017; pp. 237–248. ISBN 978-0-12-809806-6. [Google Scholar]
- Ploumpidou, E. Supporting the Transition to DC Micro Grids in the Built Environment 2017; Technische Universiteit Eindhoven: Eindhoven, The Netherlands, 2017. [Google Scholar]
- Hakala, T.; Lahdeaho, T.; Komsi, R. LVDC pilot implementation in public distribution network. In Proceedings of the International Conference Electric Distribution (CIRED), Lyon, France, 15–18 June 2015; pp. 1–5. [Google Scholar]
- Ullah, S.; Haidar, A.M.A.; Hoole, P.; Zen, H.; Ahfock, T. The Current State of Distributed Renewable Generation, Challenges of Interconnection and Opportunities for Energy Conversion Based DC Microgrids. J. Clean Prod. 2020, 273, 122777. [Google Scholar] [CrossRef]
- Gao, L.; Liu, Y.; Ren, H.; Guerrero, J.M. A DC Microgrid Coordinated Control Strategy Based on Integrator Current-Sharing. Energies 2017, 10, 1116. [Google Scholar] [CrossRef] [Green Version]
- Park, D.; Candelaria, J.; Ma, L.; Dunn, K. DC ring-bus microgrid fault protection and identification of fault location. IEEE Trans. Power Deliv. 2013, 28, 2574–2584. [Google Scholar] [CrossRef]
- Jiang, Z.; Hossain, S.; Huang, H. A distributed, real-time simulation platform for aerospace power system design, testing and evaluation. In Proceedings of the 2016 IEEE National Aerospace and Electronics Conference (NAECON) and Ohio Innovation Summit (OIS), Dayton, OH, USA, 26–29 July 2016; pp. 9–15. [Google Scholar]
- Han, D.; Li, S.; Sarlioglu, B. Adoption of wide bandgap technology in hybrid/electric vehicles-opportunities and challenges. In Proceedings of the IEEE International Transportation Electrification Conference (ITEC), Chicago, IL, USA, 22–24 June 2017; pp. 561–566. [Google Scholar]
- Miftakhutdinov, R. Overview and design aspects of data- and telecommunication power system to meet latest efficiency and power saving standards and regulations. In Proceedings of the 2011 33rd International Telecommunications Energy Conference (INTELEC), Amsterdam, The Netherlands, 9–13 October 2011. [Google Scholar]
- Diaz, E.R.; Vasquez, J.C.; Guerrero, J.M. Intelligent dc homes in future sustainable energy systems: When efficiency and intelligence work together. IEEE Consum. Electron. Mag. 2016, 5, 74–80. [Google Scholar] [CrossRef] [Green Version]
- Dragičević, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. Dc microgrids-part ii: A review of power architectures, applications, and standardization issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef] [Green Version]
- Burmester, D.; Rayudu, R.; Seah, W.; Akinyele, D. A review of nanogrid topologies and technologies. Renew. Sustain. Energy Rev. 2017, 67, 760–775. [Google Scholar] [CrossRef]
- Boroyevich, D.; Cvetkovic, I.; Dong, D.; Burgos, R.; Lee, F. Future electronic power distribution systems a contemplative view. In Proceedings of the 2010 12th International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 20–22 May 2010; pp. 1369–1380. [Google Scholar]
- Boroyevich, D.; Cvetkovic, I.; Burgos, R. Intergrid: A future electronic energy network? IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 127–138. [Google Scholar] [CrossRef]
- Francis, A.; Asensi, R.; Garcia, O.; Prieto, R.; Uceda, J. Modeling electronic power converters in smart dc microgrids—An overview. IEEE Trans. Smart Grid 2017, 9, 6274–6287. [Google Scholar] [CrossRef]
- Cvetkovic, I.; Dong, D.; Zhang, W.; Jiang, L.; Boroyevich, D.; Lee, F.; Mattavelli, P. A Testbed for Experimental Validation of a Low-voltage DC Nanogrid for Buildings. In Proceedings of the International Power Electronics and Motion Control Conference EPE-PEMC, Novi Sad, Serbia, 4–6 September 2012; pp. 1–8. [Google Scholar]
- AlLee, G.; Tschudi, W. Edison redux: 380 Vdc brings reliability and efficiency to sustainable data centers. IEEE Power Energy Mag. 2012, 10, 50–59. [Google Scholar] [CrossRef]
- Pratt, A.; Kumar, P.; Aldridge, T.V. Evaluation of 400V DC distribution in telco and data centers to improve energy efficiency. In Proceedings of the 29th International Telecommunications Energy Conference, Rome, Italy, 30 September–4 October 2007; pp. 32–39. [Google Scholar]
- Hirose, K. Consideration of voltage range of a 380 VDC distribution system for international standardization. In Proceedings of the 35th International Telecommunications Energy Conference, Smart Power Efficiency (INTELEC), Hamburg, Germany, 13–17 October 2013; pp. 1–6. [Google Scholar]
- Inamori, J.; Hoshi, H.; Tanaka, T.; Babasaki, T.; Hirose, K. 380-VDC power distribution system for 4-MW-scale cloud facility. In Proceedings of the 2014 IEEE 36th International Telecommunications Energy Conference (INTELEC), Vancouver, BC, Canada, 28 September–2 October 2014; pp. 1–8. [Google Scholar]
- Lucia, O.; Cvetkovic, I.; Boroyevich, D.; Mattavelli, P.; Lee, F. Design of Household Appliances for DC-Based Nanogrid System: An Induction Heating Cooktop Study Case. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 1576–1583. [Google Scholar]
- Emadi, A. Modeling and analysis of multiconverter dc power electronic systems using the generalized state-space averaging method. IEEE Trans. Ind. Electron. 2004, 51, 661–668. [Google Scholar] [CrossRef]
- Mocci, A.; Serpi, A.; Marongiu, I.; Gatto, G. Enhanced modeling of dc-dc power converters by means of averaging technique. In Proceedings of the 40th Annual Conference of the IEEE Industrial Electronics Society (IECON), Dallas, TX, USA, 29 October–1 November 2014; pp. 5101–5107. [Google Scholar]
- Oliver, J.A.; Prieto, R.; Romero, V.; Cobos, J.A. Behavioral modeling of DC-DC converters for large-signal simulation of distributed power systems. In Proceedings of the 21st Annual IEEE Applied Power Electronics Conference and Exposition (APEC’06), Dallas, TX, USA, 19–23 March 2006. [Google Scholar]
- Arnedo, L.; Burgos, R.; Wang, F.; Boroyevich, D. Black-box terminal characterization modeling of DC-to-DC Converters. In Proceedings of the 22nd Annual IEEE Applied Power Electronics Conference and Exposition (APEC’07), Anaheim, CA, USA, 25 February–1 March 2007. [Google Scholar]
- Cvetkovic, I.; Boroyevich, D.; Mattavelli, P.; Lee, F.C.; Dong, D. Nonlinear, hybrid terminal behavioral modeling of a dc-based nanogrid system. In Proceedings of the 26th Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 6–11 March 2011. [Google Scholar]
- Valdivia, V.; Barrado, A.; Lazaro, A.; Zumel, P.; Raga, C. Easy modeling and identification procedure for “black box” behavioral models of power electronics converters with reduced order based on transient response analysis. In Proceedings of the 24th Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Washington, DC, USA, 15–19 February 2009. [Google Scholar]
- Francis, A.; Asensi, R.; Garcia, O.; Prieto, R.; Uceda, J. Black-box small-signal structure for single-phase and three-phase electric vehicle battery chargers. IEEE Access 2020, 8, 170496–170506. [Google Scholar]
- Cho, B.H. Modeling and Analysis of Spacecraft Power Systems. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, Virginia, 1985. [Google Scholar]
- Ali, H.; Zheng, X.; Zaman, H.; Liu, H.; Wu, X. Behavioral Modeling for parallel and cascade connected dc-dc converters. J. Circuits Syst. Comput. 2019, 28, 1950058-1–1950058-17. [Google Scholar] [CrossRef]
- Gong, H.; Yang, D.; Wang, X. Identification of the DQ impedance model for three-phase power converter considering the coupling effect of the grid impedance. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 120–126. [Google Scholar]
- Valdivia, V.; Lazaro, A.; Barrado, A.; Zumel, P.; Fernandez, C.; Sanz, M. Black-Box Modeling of Three-Phase Voltage Source Inverters for System-Level Analysis. IEEE Trans. Ind. Electron. 2012, 59, 3648–3662. [Google Scholar] [CrossRef]
- Guarderas, G.; Frances, A.; Asensi, R.; Uceda, J. Large-signal blackbox behavioral modeling of grid-supporting power converters in AC microgrids. In Proceedings of the 2017 IEEE 6th International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017; pp. 153–158. [Google Scholar]
- Ali, H.; Liu, H.; Zheng, X.; Gao, P.; Zaman, H. Frequency response based behavioral modeling verification for three phase AC-DC converter. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 4908–4912. [Google Scholar]
- Maranesi, P.G.; Tavazzi, V.; Varoli, V. Two-port characterization of PWM voltage regulators at low frequencies. IEEE Trans. Ind. Electron. 1988, 35, 444–450. [Google Scholar] [CrossRef]
- Ali, H.; Zheng, X.; Wu, X.; Zaman, H.; Khan, S. Reduced Order Identification and Stability Analysis of DC-DC Converters. J. Power Electron. 2017, 17, 453–463. [Google Scholar] [CrossRef] [Green Version]
- Ljung, L. Integrated frequency-time domain tools for system identification. In Proceedings of the American Control Conference, Boston, MA, USA, 30 June–2 July 2004. [Google Scholar]
- MathWorks. Available online: http://www.mathworks.com (accessed on 5 November 2020).
- Ljung, L. System Identification—Theory for the User, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Chen, F.; Burgos, R.; Boroyevich, D.; Zhang, X. Low-Frequency Common-Mode Voltage Control for Systems Interconnected with Power Converters. IEEE Trans. Ind. Electron. 2017, 64, 873–882. [Google Scholar] [CrossRef]
- Liang, Y.; Zhang, H.; Du, M.; Sun, K. Parallel Coordination Control of Multi-Port DC-DC Converter for Stand-Alone Photovoltaic-Energy Storage Systems. CPSS Trans. Power Electron. Appl. 2020, 5, 235–241. [Google Scholar] [CrossRef]
- She, X.; Huang, A.Q.; Lukic, S.; Baran, M.E. On Integration of Solid-State Transformer with Zonal DC Microgrid. IEEE Trans. Smart Grid 2012, 3, 975–985. [Google Scholar] [CrossRef]
- Wildrick, C.M.; Lee, F.C.; Cho, B.H.; Choi, B. A method of defining the load impedance specification for a stable distributed power system. IEEE Trans. Power Electron. 1995, 10, 280–285. [Google Scholar] [CrossRef]
- Sun, J. Small-signal methods for AC distributed power systems-A review. IEEE Trans. Power Electron. 2009, 24, 2545–2554. [Google Scholar]
- Middlebrook, R.D. Input Filter Considerations in Design and Application of Switching Regulators. In Proceedings of the IEEE Industrial Applications Society Annual Meeting, Chicago, IL, USA, 11–14 October 1976; pp. 366–382. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Output Voltage | ||||
|---|---|---|---|---|---|
| DC–DC Boost Converter | 55 | 10 | 1 | 2500 | 380 |
| Bidirectional Converter | 240 | 10 k | 10 | 150 | 380 |
| DC–DC Buck Converter | 380 | 100 k | 1 | 520 | 48 |
| Figure No. | Parameter | Mean Square Error (MSE) |
|---|---|---|
| Figure 9 | Output Voltage | 0.0791 |
| Figure 10 | Bus Current | 0.9810 |
| Bus Voltage | 0.8714 | |
| Figure 11 | Bus Voltage | 0.1938 |
| PV Input Current | 0.0412 | |
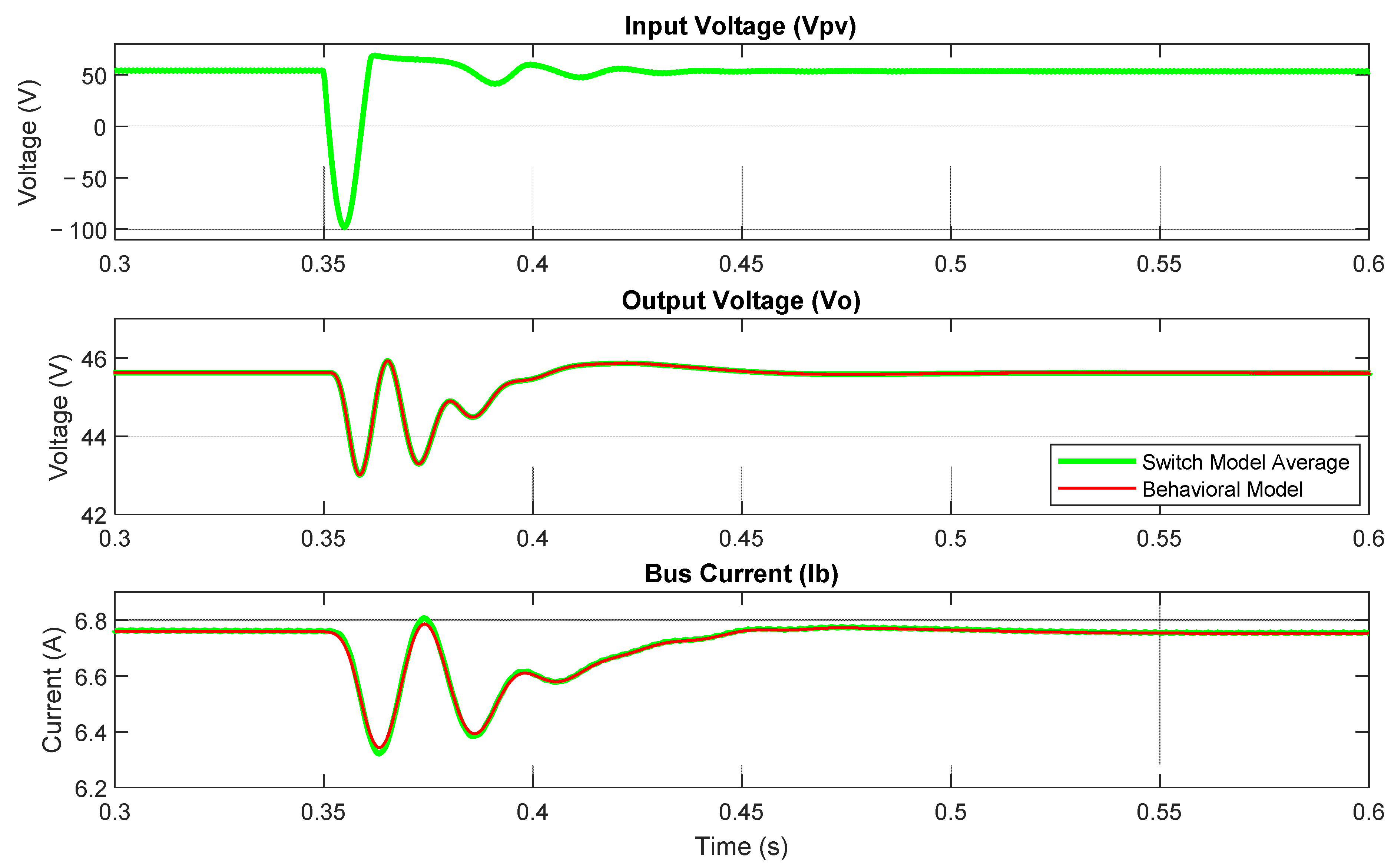
| Figure 12 | Output Voltage | 0.0012 |
| Bus Current | 0.0047 |
| Switch Model | Behavioral Model | Percentage Decrease |
|---|---|---|
| 140 s | 18 s | 87.1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saad, M.; Ju, Y.; Ali, H.; Jan, S.U.; Awan, D.; Khan, S.; Wadood, A.; Khan, B.M.; Ali, A.; Khurshaid, T. Behavioral Modeling Paradigm for DC Nanogrid Based Distributed Energy Systems. Energies 2021, 14, 7904. https://doi.org/10.3390/en14237904
Saad M, Ju Y, Ali H, Jan SU, Awan D, Khan S, Wadood A, Khan BM, Ali A, Khurshaid T. Behavioral Modeling Paradigm for DC Nanogrid Based Distributed Energy Systems. Energies. 2021; 14(23):7904. https://doi.org/10.3390/en14237904
Chicago/Turabian StyleSaad, Muhammad, Yongfeng Ju, Husan Ali, Sami Ullah Jan, Dawar Awan, Shahbaz Khan, Abdul Wadood, Bakht Muhammad Khan, Akhtar Ali, and Tahir Khurshaid. 2021. "Behavioral Modeling Paradigm for DC Nanogrid Based Distributed Energy Systems" Energies 14, no. 23: 7904. https://doi.org/10.3390/en14237904
APA StyleSaad, M., Ju, Y., Ali, H., Jan, S. U., Awan, D., Khan, S., Wadood, A., Khan, B. M., Ali, A., & Khurshaid, T. (2021). Behavioral Modeling Paradigm for DC Nanogrid Based Distributed Energy Systems. Energies, 14(23), 7904. https://doi.org/10.3390/en14237904