1. Introduction
In order to alleviate the pressure of energy shortage and environmental pollution, a hybrid system is widely used [
1]. Couplers are particularly important in the hybrid system. Coupling modes include power coupling, speed coupling, and torque coupling. The planetary gear mechanism used in the Prius series car is a speed coupler which can realize power coupling together with a permanent-magnet synchronous generator and a permanent-magnet synchronous machine [
2]. According to the power-command value output by the energy management controller, the working point of the internal combustion engine can conduct torque-speed and two-dimensional optimization. In contrast to the above mechanical coupling scheme, the four-port electromechanical energy converter cascades two induction machines [
3,
4]. This pure electrical coupling scheme realizes the power coupling, but the existence of the brush and slip ring shortens the service life of the machine and increases the maintenance cost. The cup rotor permanent-magnet doubly fed machine studied in this paper has no brush and slip ring and is composed of a wound stator, a cup rotor, and a rotating permanent-magnet stator [
5]. By adjusting the power-supply frequency of the stator windings, the speed of the permanent-magnet stator can be adjusted to optimize the working point of the internal combustion engine, so it can be used as a speed coupler for vehicle driving.
Up to now, there are few reports on the modeling and control methods of the cup rotor permanent-magnet doubly fed machine. In terms of a mathematical model, only the mathematical model of the cup rotor permanent-magnet doubly fed machine in the two-phase rotor reference frame has been established, and the open-loop operation characteristics are simulated based on this model [
5]. The equivalent circuit of the cup rotor permanent-magnet doubly fed machine is given in [
6]. In [
7], the vector control based on the rotor magnetic-field orientation is designed for the cup rotor permanent-magnet doubly fed machine, but the decoupling control is not realized, and the simulation results are not given.
The cup rotor permanent-magnet doubly fed machine is similar to the brushless doubly fed machine (BDFM) in the modeling and control methods. So, this paper takes the BDFM as a pointcut for research. The mathematical model of the BDFM has experienced the transition from the multi-loop mathematical model to the double synchronous reference frame and then to the unified synchronous reference frame [
8,
9,
10]. The model of the BDFM in the unified synchronous reference frame has many advantages, but so far, this model has not been given in the form of state space and is mostly used in the stator magnetic-field-orientation control methods. It needs to be modified as necessary for the content and control purposes of this paper.
The control methods of the BDFM include scalar control, vector control, and direct torque control. To get better control performance, vector control is a better option. Vector control can be divided into two kinds according to different mathematical models. One is the method based on the double synchronous reference frame model introduced in [
9]. For the high-power machines, the method in [
9] ignores the stator resistance of the power machine so the influence of the control machine on the stator magnetic-field of the power machine is ignored. The stator magnetic-field of the power machine is determined by the stator voltage of the power machine. Based on this, the rotor magnetic-field is decomposed into two parts which are excited by the stator magnetic-field of the power machine and the stator current of the control machine, respectively. Based on the control machine stator-current-excitation part, the stator current of the control machine is controlled by the same method as the asynchronous machine slip-frequency type vector control. At the same time, the machine torque is calculated based on the decomposition of the rotor magnetic-field, and the stator-current reference value of the control machine is determined to control the torque and rotor flux. Obviously, because the rotor magnetic field excited by the stator current of the control machine is only a component of the rotor magnetic field, it cannot really reflect the excitation of the machine’s magnetic-field and the saturation of the rotor magnetic circuit and make them effectively controlled. In addition, the decomposition of the rotor magnetic-field makes the control method complicated and the calculation amount increase significantly.
The other method is based on the unified synchronous reference frame model introduced in [
11]. The unified reference frame model of the BDFM can be obtained by selecting one of the power machines or control machines and taking the conjugate transformation of the relevant variables. In [
11], the vector sum of the rotor flux of the power machine and the control machine, that is, the total flux coupled by the rotor windings, is taken as the variable and referred to as the rotor flux. Because the pole pairs of the power machine and the control machine are different, the rotor flux mentioned above cannot reflect the excitation and the saturation of the magnetic circuit of the rotor. Therefore, this model is mainly used in the control method of the BDFM based on the stator magnetic-field orientation for the grid-connected power generation to realize the control of the reactive power and speed. Moreover, this control is only a simple feedback control in the synchronous reference frame, without a decoupling control characteristic. The control method given in [
12] combines the above two control methods, but it does not directly control the flux, and it also requires a certain amount of calculation. In order to eliminate the influence of the machine parameters on the vector control system, the literature [
13] adds an extended Kalman filter to the parameter identification on the basis of the vector control, which improves the robustness of the control system.
In addition, and also for the high-power BDFM, because the rotor impedance of the machine is much smaller than the inductive reactance, the asynchronous torque of the BDFM is very small and only the synchronous torque is considered; the output torque of the BDFM is proportional to the angle between the stator magnetic-field of the control machine and the stator magnetic-field of the power machine. Thus, the direct-torque-control method of the BDFM can be given. Obviously, due to the approximation in modeling, when the torque output is large and the speed is wide, there is a problem of loss of control, and the driving ability of the machine cannot be fully played [
14]. In [
15], the output capacity of the BDFM direct-torque-control system is improved by setting a flux-angle inner loop.
To improve the efficiency of the machine, the maximum torque per ampere (MTPA) control method has been proposed [
16,
17]. So far, there is little research on the MTPA control of the BDFM, and the MTPA control of the BDFM is more complex. In [
18,
19], for the BDFM an offline search method is adopted to realize the steady-state efficiency optimization. In particular, there is no MTPA control method for the machine studied in this paper.
The main purpose of this paper is to design control methods to maximize the performance of the cup rotor permanent-magnet doubly fed machine. The works conducted by the authors’ laboratory on the BDFM include the state-space model in the unified reference frame of the BDFM; the feedback linearization and slip-frequency type vector control method based on this model [
20,
21]; the improvement of direct torque control by setting the inner loop of the flux-angle [
15]; and the maximum load capacity of the BDFM [
22]. According to the research results of the BDFM and the research ideas of the authors’ laboratory, for the cup rotor permanent-magnet doubly fed machine, a new type of machine, this paper first establishes the state-space model in the unified synchronous reference frame. Based on this model, the feedback-linearization control method is designed to realize the decoupling control of the flux and torque, and the load capacity of this machine is solved. Furthermore, this paper studies the MTPA control method of this machine.
This paper is organized as follows:
Section 2 establishes the state-space model of the cup rotor permanent-magnet doubly fed machine in the unified synchronous reference frame.
Section 3 derives the feedback-linearization control method of the cup rotor permanent-magnet doubly fed machine.
Section 4 solves the static load capacity of the cup rotor permanent-magnet doubly fed machine.
Section 5 further deduces the MTPA control law.
Section 6 is the simulation verification of the two control methods and the load torque boundaries.
Section 7 is the summary of the whole paper.
2. Mathematical Model of Cup Rotor Permanent-Magnet Doubly Fed Machine
The cup rotor permanent-magnet doubly fed machine is composed of a rotating permanent-magnet stator, a cup rotor with inner and outer windings connected in a reverse phase sequence and a wound stator, as shown in
Figure 1. The rotating permanent-magnet stator is connected to the internal combustion engine (ICE); the wound stator is connected to the inverter; and the cup rotor is used as the output shaft. Similar to the BDFM, the inner winding of the cup rotor and the rotating permanent-magnet stator constitute the power machine with pole pairs of
, while the outer winding of the cup rotor and the wound stator constitute the control machine with pole pairs of
.
From the reverse phase sequence connection relationship between the inner and outer windings of the cup rotor, it is easy to see that when the steady sinusoidal current flows through the rotor windings, the inside and outside magnetic fields of the rotor rotate in the opposite direction with an equal electric angular speed relative to the rotor, and the machine can output a stable torque. At this time, the cup rotor speed is
When , the machine is in a super-synchronous operation state; when , the machine is in a sub-synchronous operation state; and when , the machine is in a synchronous operation state. So, the cup rotor speed can be adjusted by adjusting ; the cup rotor permanent-magnet doubly fed machine shows the characteristics of the synchronous machine, and when rotor losses are ignored, the torques of the control machine and the power machine are in the same direction and proportional to their pole pairs. If this machine is used in hybrid electric vehicles, when the ICE shaft is locked, that is, , the vehicle works in pure electric mode; when , the vehicle works in ICE independent drive mode; otherwise, the vehicle works in hybrid drive mode. In the above three modes, the output torque of the machine can be controlled by controlling the stator current of the control machine. In particular, in the hybrid mode, except to respond to the output torque reference value, the ICE speed optimization can be realized by controlling to reduce fuel consumption (speed coupling).
The relationships between the reference frames are shown in
Figure 2, and the transformations between the reference frames are in accordance with the principle of equal power transformation, and the counterclockwise rotation is positive.
The control machine of the cup rotor permanent-magnet doubly fed machine is an asynchronous machine, and the power machine can be regarded as a surface-mounted permanent-magnet synchronous machine with stator rotation. Obviously, there is only electrical coupling between the two rotor windings but no coupling between the magnetic fields. The stator and rotor voltage models of the control machine in the rotor reference frame are as follows
In this paper, all vectors are expressed in the complex form of their projection values on a two-phase reference frame; for example, , no more details below.
The stator and rotor fluxes of the control machine are
The rotor voltage model of the power machine in the rotor reference frame is
and the expression for
is
The rotor flux and the permanent-magnet flux of the power machine are
The electromagnetic torque of the cup rotor permanent-magnet doubly fed machine is
The three-phase voltage and current relationship of the rotor under the reverse phase sequence connection is shown in
Figure 3. After 3/2 transformation, the rotor voltage and the current relationships of the power machine and the control machine in the rotor reference frame are as follows
Next, taking the negative conjugate operation on both sides of Equation (4), substituting Equation (8) into it, and redefining the variables of the power machine,
The mathematical model of the cup rotor permanent-magnet doubly fed machine in the rotor reference frame can be obtained as follows
where
,
.
The reasons for the negative conjugation are as follows: as shown in
Figure 4, when the machine is running stably, relative to the rotor reference frame, the flux of the control machine and the flux of the power machine rotate in opposite directions and have equal electrical speed; that is,
. Because the voltage and current of the power machine and the control machine are AC variables in the rotor reference frame, this increases the difficulty of control. If the control machine variables are taken as the benchmark and the power machine variables are performed as a negative conjugate operation, then all the variables rotate in the same direction relative to the rotor reference frame, and all the variables in the synchronous reference frame of the control machine are DC values, which is convenient for the design of the control methods.
So, Equation (10) is called the unified reference frame model. Next, Equation (10) is rotated to the synchronous reference frame of the control machine, and the rotation transformation rule is
Then, the state-space model in the synchronous reference frame can be obtained.
where
,
,
,
,
,
and
are the state variables,
and
are the input variables.
The electromagnetic torque in the synchronous reference frame is expressed as
Finally, the motion equation of the cup rotor permanent-magnet doubly fed machine is
3. Feedback Linearization Control of Cup Rotor Permanent-Magnet Doubly Fed Machine
In order to fully play the driving performance of the cup rotor permanent-magnet doubly fed machine, its input and output feedback linearization control is considered here. In addition, machine control systems generally have fast-responding current loops; this is equivalent to the control machine supplied by the current source. In order to obtain the state-space description of the machine when the control machine is supplied by the current source (this means that the stator current of the control machine will be the input variable, rather than the stator voltage of the control machine), new state variables need to be redefined to remove the influence of the stator voltage of the control machine on the system state variables. Through the observation of the first column of the
in the Equation (12), it is easy to see that the above purposes can be achieved by defining the following new state variable
Note that since the permeability of the permanent magnet in the magnetic circuit of the power machine is close to the air and the air gap is much larger than that of the control machine,
is very small so there is
. The newly defined state variable in Equation (15) is close to the rotor flux of the control machine so it is called the rotor flux of the control machine. The rotor flux of the control machine defined by Equation (15) is different from the rotor flux defined by the vector sum of the rotor flux of the power machine and the control machine with different pole pairs in [
23,
24]. The amplitude of the rotor flux is usually small and cannot reflect the saturation of the rotor magnetic circuit. This also indicates that the rotor flux of the power machine and the control machine with different pole pairs are two vectors with approximately equal size and opposite directions. Based on the above facts, the rotor flux of the control machine defined in Equation (15) is selected as the state variable in this paper so that the saturation of the magnetic circuit of the rotor of the machine can be more effectively controlled.
According to the reasons given above, the newly defined state variable
is substituted into Equation (12) to replace the original state variables
. In addition, under the current source, the first line of the stator voltage equation in Equation (12) is removed. The mathematical model of the cup rotor permanent-magnet doubly fed machine is obtained.
Equation (16) is a two-order model, and the electromagnetic torque of the machine expressed by the new variable is
Next, the rotor magnetic-field of the control machine is oriented; that is,
so Equations (16) and (17) can be written as
The rotor flux of the control machine and the electromagnetic torque are selected as the output variables, and their expressions can be divided into the linear part, the state-dependent nonlinear part, and the input-dependent part, as follows
where
,
.
Obviously, the relationship between the torque and the stator current of the control machine is nonlinear, and the rotor flux of the control machine and torque are coupled. According to Equation (21), the input-output feedback linearized control method is designed to realize the decoupling control of the flux and torque.
When
is nonsingular, the input-output feedback linearization can be performed by the following control law
where
is a new input variable, and Equation (21) can be written as
From Equation (23), it can be seen that the rotor flux of the control machine from the input
is an inertial link, and the electromagnetic torque is proportional to the input
. The rotor flux and the torque are completely decoupled. The reference values of the input variables are
According to Equation (22), the feedback linearization control can be carried out on the premise that
is nonsingular; that is,
In the electromagnetic torque expression,
appears in the form of the coefficient of
. This coefficient is not expected to cross zero in the control process, otherwise the torque would be out of control. Obviously, when the following equation is satisfied, the requirement of Equation (25) can be satisfied.
In the above statements, the rotor flux of the control machine and the torque are taken as the output variables. It can be known from Equations (18) and (20) that the input variable appears after the first derivative of the rotor flux; so, its relative order is 1. The electromagnetic torque expression itself contains inputs ; so, its relative order is 0. Therefore, the relative order of the system outputs to the inputs is 1, which is consistent with the order of the mathematical model of the machine after magnetic-field orientation (Equation (18)). Therefore, this system has no zero dynamic after the feedback linearization.
4. Static Load Capacity of Cup Rotor Permanent-Magnet Doubly Fed Machine
This section discusses the static load capacity of the cup rotor permanent-magnet doubly fed machine. When the machine have sinusoidal steady-state solutions, all the variables in the synchronous reference frame are DC values so Equation (18) can be written as
Then, Equations (19) and (27) are substituted into Equation (20) to get the electromagnetic torque expression; that is,
It can be seen from Equation (28) that the electromagnetic torque is limited under certain rotor flux, speed, and machine parameters. The load torque boundaries will be solved.
When the machine is running stably,
,
; so, Equation (28) can be written as
It can be seen from Equation (29) that under the certain speed and machine parameters, when
or
, the upper and lower load torque boundaries of the machine with sinusoidal steady-state solution can be obtained. According to the parameters of the cup rotor permanent-magnet doubly fed machine in
Table 1, the load torque is converted into per-unit value based on the rated torque; that is,
and the numerical calculation results of the load capacity are shown in
Figure 5 and
Table 2.
It can be seen from Equation (29) that the upper and lower load torque boundaries are inversely proportional to the rotor resistance. In addition, when the supply voltage and frequency are constant, the flux amplitude is constant, and the inductive reactance and impedance decrease proportionally with the increase in the capacity of the machine; so, the per-unit values of the upper and lower load torque boundaries are independent of the capacity of the machine. Therefore, the load capacity of the machine can be improved by reducing the rotor resistance.
Furthermore, the upper and lower load torque boundaries are affected by the machine speed. According to Equation (29), when the rotor flux of the control machine is constant, the width of the load torque interval decreases linearly, and the load torque capacity becomes weak with the decrease in the speed difference
, as shown in
Figure 6a. In addition, as shown in
Figure 6b, when the machine speed is constant, the width of the load torque interval is positively correlated with the rotor flux of the control machine. However, when the rotor flux of the control machine increases, the positive load capacity of the machine becomes weak. Therefore, the rotor flux of the control machine can be appropriately reduced at high speed.
5. MTPA Control of Cup Rotor Permanent-Magnet Doubly Fed Machine
In order to minimize the stator current amplitude of the control machine when the electromagnetic torque is fixed, Lagrange’s theorem is used to find out the extremum relation. The auxiliary function introduced is
Next, the partial derivatives are taken with respect to
,
, and
and made equal to 0.
From the first two lines of Equation (31), the ratio of
to
can be obtained.
The third line in Equation (31) can be written as
In addition, Equation (18) can be written as
From Equations (33) and (34), the ratio of
to
can also be obtained as follows
So, by substituting Equation (32) into Equation (35), the relationship can be obtained as follows
The speed loop and the MTPA control are the outer loops. They generate the reference values of the torque of the feedback linearization and the rotor flux of the control machine. The changes in the torque and rotor flux of the control machine are ignored and replaced by their reference values. Equation (36) can be written as
To solve the rotor flux reference value of the control machine under a different torque, Equation (37) can be converted into the following form
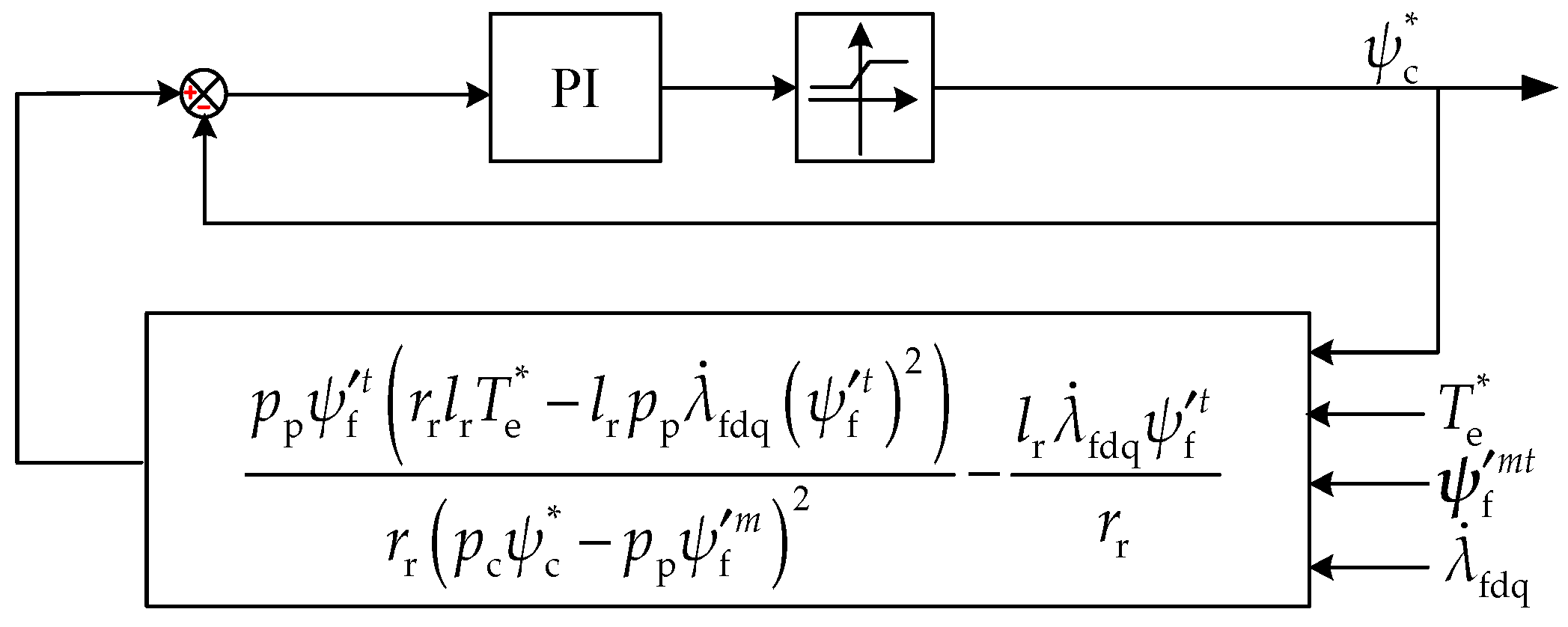
Accordingly, the following feedback regulation system (
Figure 7) is constituted. Obviously, when the value of
converges to a constant, the solution of the above Equation (37) is obtained.
So far, the control system block diagram of the slip-frequency type realization of the feedback linearization and the MTPA control of the cup rotor permanent-magnet doubly fed machine is shown in
Figure 8. The output of the speed loop is the torque reference value, and the rotor flux reference value of the control machine is obtained by the MTPA control. The synchronization angle used for the rotation transformation is obtained by integrating the sum of the angular speed
of the machine and the slip angular speed
obtained by Equation (19), and the rotor flux and stator current of the control machine in Equation (19) are replaced by the reference values; that is,
Then, the reference values of the rotor flux of the control machine and the torque are the inputs of the feedback linearization control law to get the stator-current reference values of the control machine.
Finally, in order to show the change of the rotor flux of the control machine under the different speed and torque, Equations (29) and (37) and
are combined to solve the MTPA control law offline. Then, under the machine parameters in
Table 1, the rotor-flux reference value is obtained under different speeds and torques and plotted as a three-dimensional surface, and the torque is converted into per-unit value based on the rated torque; that is,
, as shown in
Figure 9. In addition, for the convenience of comparison and analysis, the above three-dimensional surface is converted into two dimensions, as shown in
Figure 10. When the speed of the machine is constant, the rotor-flux reference value of the control machine decreases with the increase in the torque. Similarly, when the torque is constant, the rotor-flux reference value of the control machine also decreases with the increase in the speed.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}