
Complementary Feature Extractions for Event Identification in Power Systems Using Multi-Channel Convolutional Neural Network


Abstract
:1. Introduction
2. Background
2.1. State-of-the-Art
2.2. Problem Formulation
2.3. CNN Classifier
3. CNN Based Event Identification
3.1. Data Preprocessing
3.2. Multi-Channel CNN Classifier
3.3. Event Identification Process
4. Case Study
4.1. Target System Analysis
4.2. Numerical Result
4.3. Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hojabri, M.; Dersch, U.; Papaemmanouil, A.; Bosshart, P. A comprehensive survey on phasor measurement unit applications in distribution systems. Energies 2019, 12, 4552. [Google Scholar] [CrossRef] [Green Version]
- Salehi, V.; Mazloomzadeh, A.; Fernandez, J.F.; Mohammed, O.A. Real-time power system analysis and security monitoring by WAMPAC systems. In Proceedings of the IEEE PES Innovative Smart Grid Technology, Washington, DC, USA, 16–20 January 2012; pp. 1–8. [Google Scholar]
- Almas, M.S.; Vanfretti, L. Impact of time-synchronization signal loss on PMU-based WAMPAC applications. In Proceedings of the IEEE PES General Meeting, Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Aminifar, F.; Fotuhi-Firuzabad, M.; Safdarian, A.; Davoudi, A.; Shaidehpour, M. Synchrophasor measurement technology in power systems: Panorama and state-of-the-art. IEEE Access 2015, 2, 1611–1628. [Google Scholar] [CrossRef]
- Su, H.-Y.; Liu, T.-Y. A PMU-based method for smart transmission grid voltage security visualization and monitoring. Energies 2017, 10, 1103. [Google Scholar] [CrossRef] [Green Version]
- Hong, J.-S.; Sim, G.-D.; Choi, J.-H.; Ahn, S.-J.; Yun, S.-Y. Fault location method using phasor measurement units and short circuit analysis for power distribution networks. Energies 2020, 13, 1294. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.; Abubakar, M.; Liu, H.; Hussain, F. Power quality disturbance monitoring and classification based on improved PCA and convolution neural network for wind-grid distribution systems. Energies 2019, 12, 1280. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Xia, M.; Chen, Q. A Classification identification method based on phasor measurement for distribution line parameter identification under insufficient measurement conditions. IEEE Access 2019, 7, 158732–158743. [Google Scholar] [CrossRef]
- Brahma, S.; Kavasseri, R.; Cao, H.; Chaudhuri, N.R.; Alexopoulos, T.; Cui, Y. Real-time identification of dynamic events in power systems using PMU data, and potential applications-models, promises, and challenges. IEEE Trans. Power Del. 2017, 32, 294–301. [Google Scholar] [CrossRef]
- Shi, X.; Qiu, R.; Ling, Z.; Yang, F.; Yang, H.; He, X. Spatio-temporal correlation analysis of online monitoring data for anomaly detection and location in distribution networks. IEEE Trans. Smart Grid 2020, 11, 995–1006. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.; Qiu, R.C.; Ling, Z.; He, X.; Yang, H. Detection and analysis of multiple events based on high-dimensional factor models in power grid. Energies 2019, 12, 1360. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Liu, C.; Sun, K. Image embedding of PMU data for deep learning towards transient disturbance classification. In Proceedings of the IEEE International Conference on Energy Internet, Beijing, China, 21–25 May 2018; pp. 1–6. [Google Scholar]
- Garcia, C.I.; Grasso, F.; Luchetta, A.; Piccirilli, M.C.; Paolucci, L.; Talluri, G. A comparison of power quality disturbance detection and classification methods using CNN, LSTM and CNN-LSTM. Appl. Sci. 2020, 10, 6755. [Google Scholar] [CrossRef]
- Amoateng, D.O.; Yan, R.; Saha, T.K. A deep unsupervised learning approach to PMU event detection in an active distribution network. In Proceedings of the IEEE PES General Meeting, Montreal, QC, Canada, 2–6 August 2020; pp. 1–5. [Google Scholar]
- Ma, R.; Basumallik, S.; Eftekharnejad, S. A PMU-based data-driven approach for classifying power system events considering cyberattacks. IEEE Syst. J. 2020, 14, 3558–3569. [Google Scholar] [CrossRef]
- Zhang, M.; Li, J.; Xu, R. Deep learning for short-term voltage stability assessment of power systems. IEEE Access 2021, 9, 29711–29718. [Google Scholar] [CrossRef]
- Ren, C.; Xu, Y. A fully data-driven method based on generative adversarial networks for power system dynamic security assessment with missing data. IEEE Trans. Power Syst. 2019, 34, 5044–5052. [Google Scholar] [CrossRef]
- Olivieri, C.; Paulis, F.D.; Orlandi, A.; Pisani, C.; Giannuzzi, G.; Salvati, R.; Zaottini, R. Estimation of Modal Parameters for Inter-Area Oscillations Analysis by a Machine Learning Approach with Offline Training. Energies 2020, 13, 6410. [Google Scholar] [CrossRef]
- Wang, S.; Dehghanian, P.; Li, L. Power grid online surveillance through PMU-embedded convolutional neural networks. IEEE Trans. Indust. Appl. 2020, 56, 1146–1155. [Google Scholar] [CrossRef]
- Rivas, A.; Chamoso, P.; González-Briones, A.; Corchado, J.M. Detection of cattle using drones and convolutional neural networks. Sensors 2018, 18, 2048. [Google Scholar] [CrossRef] [Green Version]
- Wshah, S.; Shadid, R.; Wu, Y.; Matar, M.; Xu, B.; Wu, W.; Lin, L.; Elmoudi, R. Deep learning for model parameter calibration in power systems. In Proceedings of the IEEE International Conference on Power Systems Technology, Banglaore, India, 13–16 September 2020; pp. 1–6. [Google Scholar]
- Ryu, S.; Choi, H.; Lee, H.; Kim, H. Convolutional autoencoder based feature extraction and clustering for customer load analysis. IEEE Trans. Power Syst. 2020, 35, 1048–1060. [Google Scholar] [CrossRef]
- Li, W.; Deka, D.; Chertkov, M.; Wang, M. Real-time faulted line localization and PMU placement in power systems through convolutional neural networks. IEEE Trans. Power Syst. 2019, 34, 4640–4651. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Wang, M. Identifying overlapping successive events using a shallow convolutional neural network. IEEE Trans. Power Syst. 2019, 34, 4762–4772. [Google Scholar] [CrossRef]
- Basumallik, S.; Ma, R.; Eftekharnejad, S. Packet-data anomaly detection in PMU-based state estimator using convolutional neural network. Int. J. Electr. Power Energy Syst. 2019, 107, 690–702. [Google Scholar] [CrossRef]
- Akhlaghi, S. Optimal PMU placement considering contingency-constraints for power system observability and measurement redundancy. In Proceedings of the IEEE PECI, Urbana, IL, USA, 19–20 February 2016; pp. 1–7. [Google Scholar]
- Cai, K.; Cao, W.; Aariniovuori, L.; Pang, H.; Lin, Y.; Li, G. Classification of power quality disturbances using wigner-ville distribution and deep convolutional neural networks. IEEE Access 2019, 7, 119099–119109. [Google Scholar] [CrossRef]
- Kim, D.-I.; Wang, L.; Shin, Y.-J. Data driven method for event classification via regional segmentation of power systems. IEEE Access 2020, 8, 48195–48204. [Google Scholar] [CrossRef]
- Kim, D.-I.; Chun, T.Y.; Yoon, S.-H.; Lee, G.; Shin, Y.-J. Wavelet-based event detection method using PMU data. IEEE Trans. Smart Grid 2017, 8, 1154–1162. [Google Scholar] [CrossRef]
- Megahed, A.I.; Moussa, A.M.; Elrefaie, H.B.; Marghany, Y.M. Selection of a suitable mother wavelet for analyzing power system fault transients. In Proceedings of the IEEE PES General Meeting, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–7. [Google Scholar]
- Abhinav, K.S.; Bikash, C.P. IEEE PES Task Force on Benchmark Systems for Stability Control, Report on the 68-Bus, 16-Machine, 5-Area System. Available online: http://www.sel.eesc.usp.br/ieee/NETS68/base.htm (accessed on 3 December 2013).
- Dasgupta, S.; Paramasivam, M.; Vaidya, U.; Ajjarapu, V. PMU-based model-free approach for real-time rotor angle monitoring. IEEE Trans. Power Syst. 2014, 30, 2818–2819. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
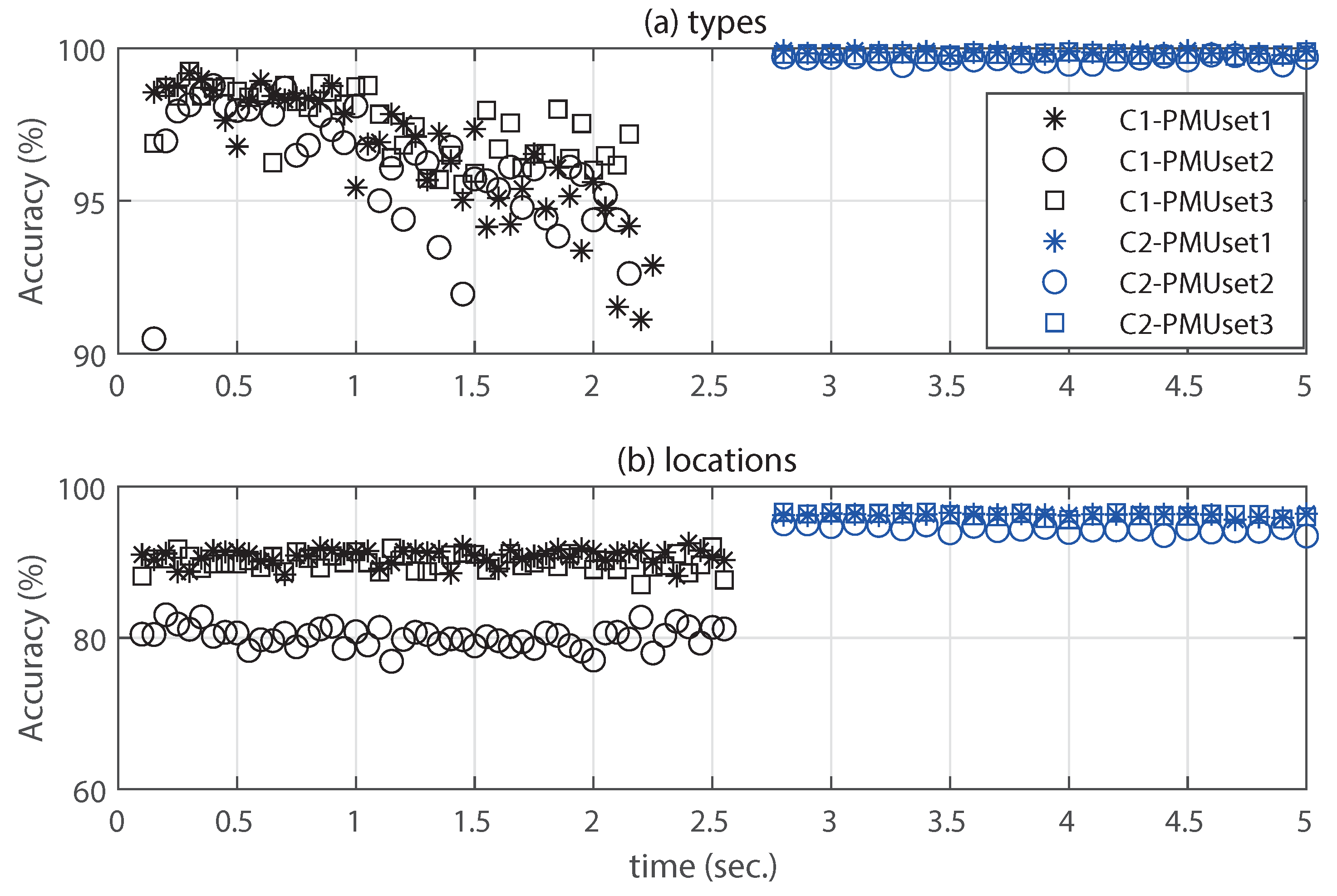
| minimum | Type Estimation | Location Estimation | |
|---|---|---|---|
| C1 classification | 0.3 s | 86.90% | 98.86% |
| C2 classification | 2.8 s | 95.96% | 99.81% |
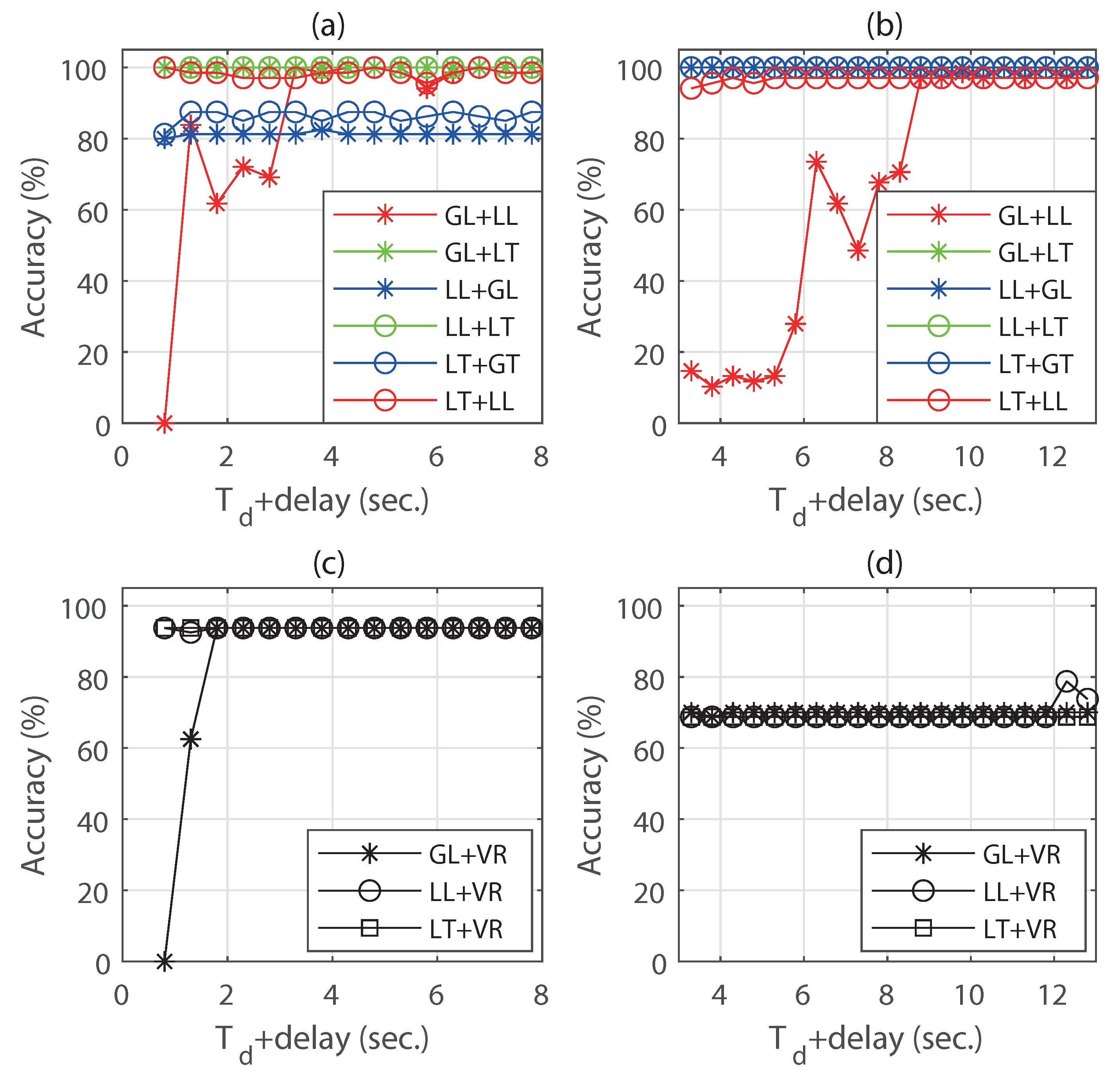
| 1st | 2nd Event Classification Accuracy | ||||||
|---|---|---|---|---|---|---|---|
| BT | VR | GL | LL | LT | RL | ||
| C1 | GL | 98.44 | 93.75 | - | 100 | 100 | 98.53 |
| LL | 97.66 | 93.75 | 81.25 | - | 100 | 98.53 | |
| LG | 100 | 93.75 | 87.50 | 97.06 | - | 100 | |
| C2 | GL | 98.44 | 70.00 | - | 97.06 | 100 | 100 |
| LL | 100 | 68.75 | 100 | - | 100 | 98.53 | |
| LG | 100 | 68.75 | 100 | 97.06 | - | 100 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.-I. Complementary Feature Extractions for Event Identification in Power Systems Using Multi-Channel Convolutional Neural Network. Energies 2021, 14, 4446. https://doi.org/10.3390/en14154446
Kim D-I. Complementary Feature Extractions for Event Identification in Power Systems Using Multi-Channel Convolutional Neural Network. Energies. 2021; 14(15):4446. https://doi.org/10.3390/en14154446
Chicago/Turabian StyleKim, Do-In. 2021. "Complementary Feature Extractions for Event Identification in Power Systems Using Multi-Channel Convolutional Neural Network" Energies 14, no. 15: 4446. https://doi.org/10.3390/en14154446
APA StyleKim, D.-I. (2021). Complementary Feature Extractions for Event Identification in Power Systems Using Multi-Channel Convolutional Neural Network. Energies, 14(15), 4446. https://doi.org/10.3390/en14154446