
Cascade-Type Pole-Zero Cancellation Output Voltage Regulator for DC/DC Boost Converters


Abstract
:1. Introduction
- (Transient performance improvement) A pole-zero cancellation mechanism based on the combination of active damping injection and a specialized PI gain structure;
- (Robustness improvement) Proof of the disturbance attenuation capability through closed-loop analysis using an active damping coefficient.
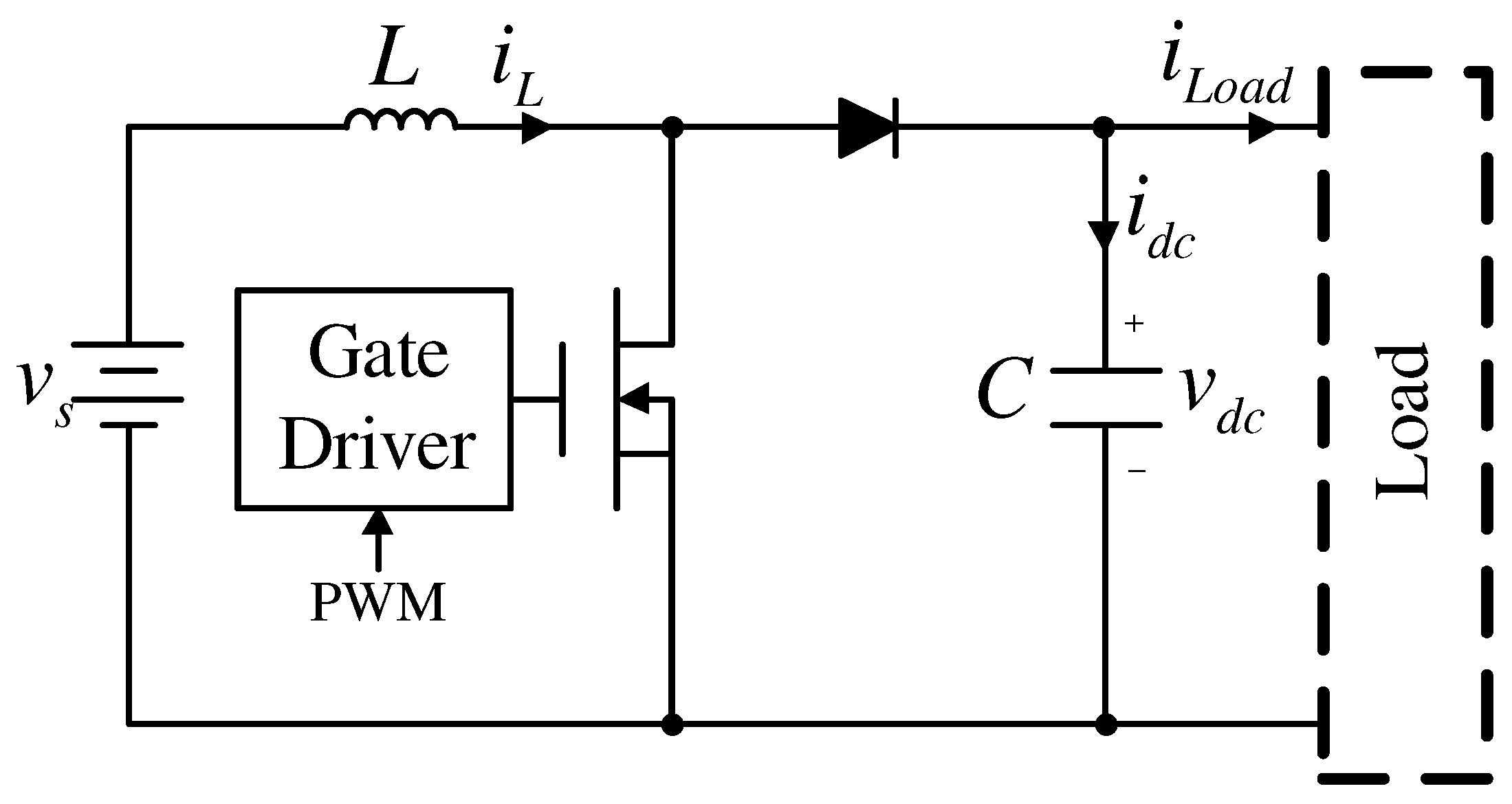
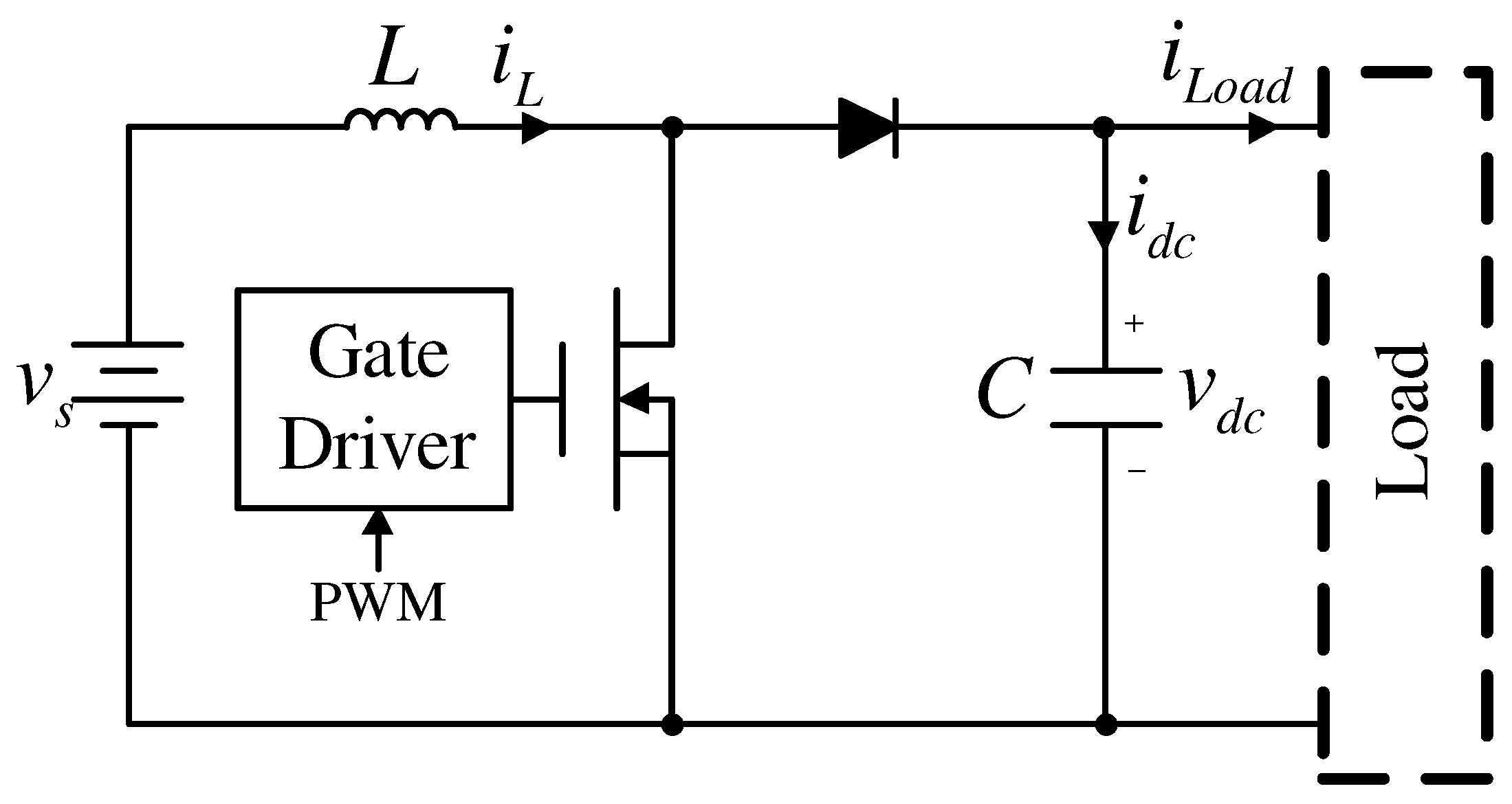
2. Nonlinear Model of DC/DC Boost Converters
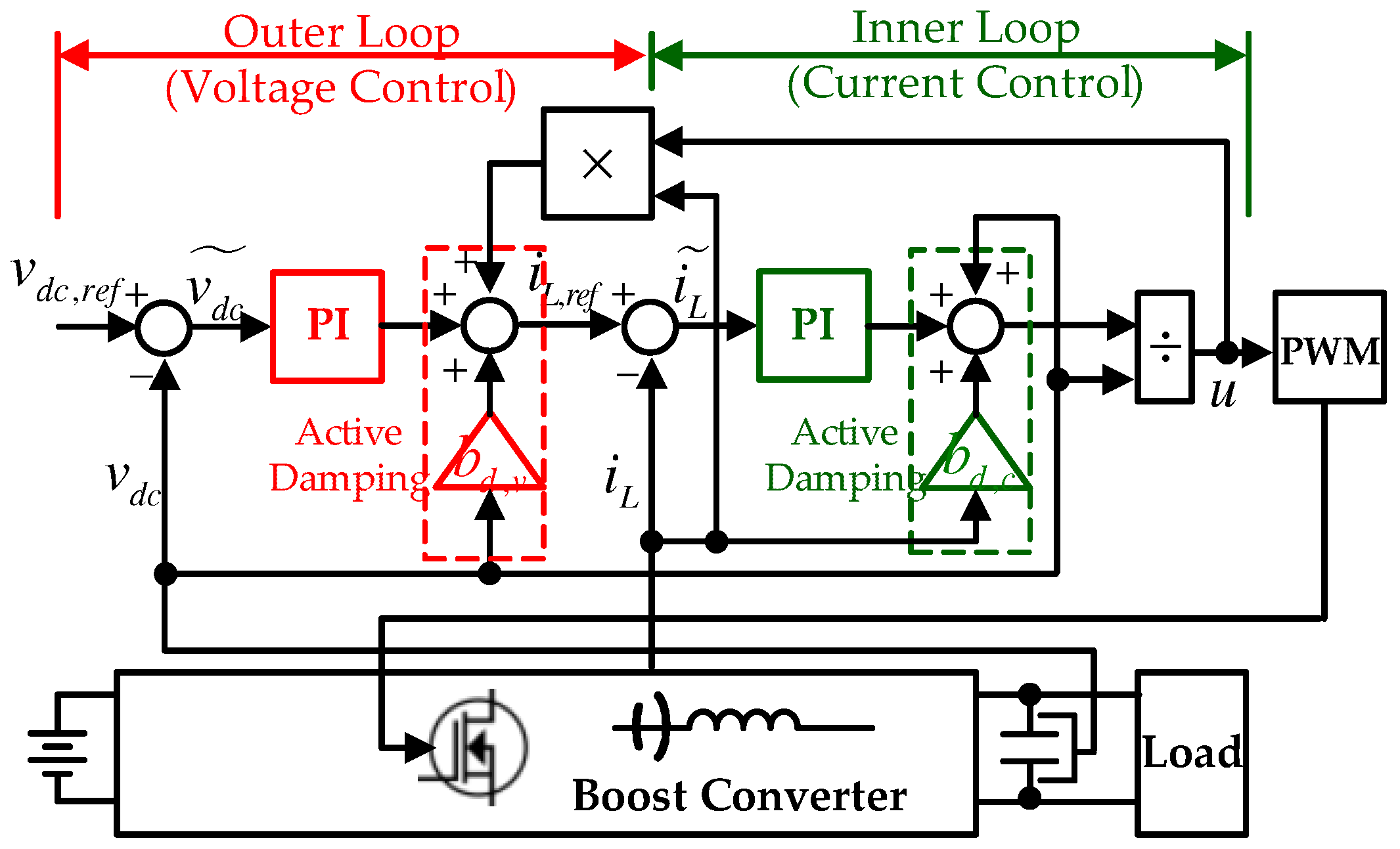
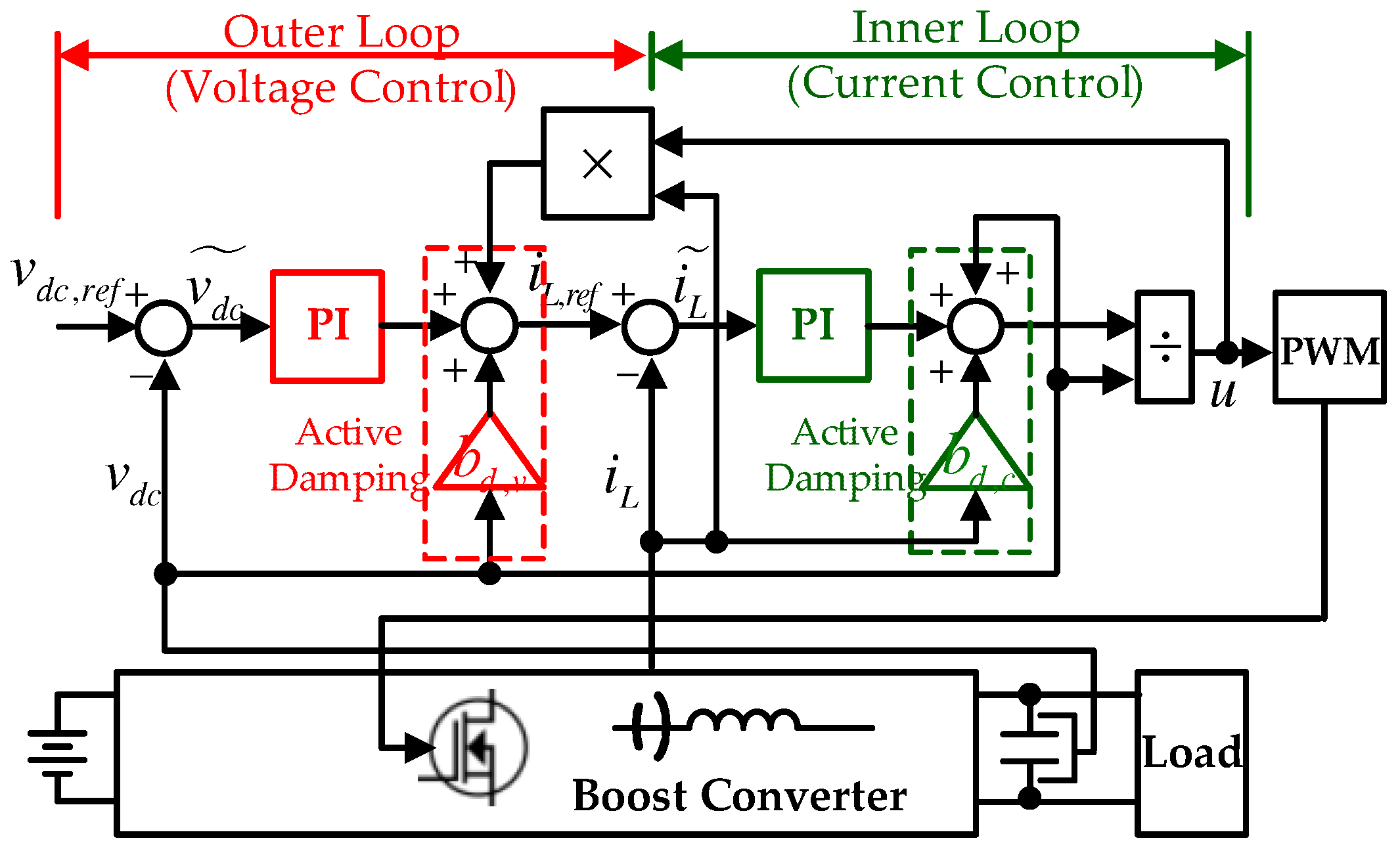
3. Proposed Control Law
3.1. Control Objective
3.2. Inductor Current Control (Inner Loop)
3.3. Output Voltage Control (Outer Loop)
- 1.
- (inner loop) Setting , increase (leading to ) until an acceptable proportional inductor current control performance is achieved (normal range: Hz).
- 2.
- For a chosen from the previous step, increase from zero until the controlled inductor current trajectory is close to its desired trajectory as possible.
- 3.
- (outer loop) Setting , increase (leading to ) until an acceptable proportional output voltage control performance is achieved (normal range: Hz).
- 4.
- For a chosen from the previous step, increase from zero until the controlled output voltage trajectory is close to its desired trajectory as possible.
4. Analysis
4.1. Inductor Current Control Loop
4.2. Output Voltage Control Loop
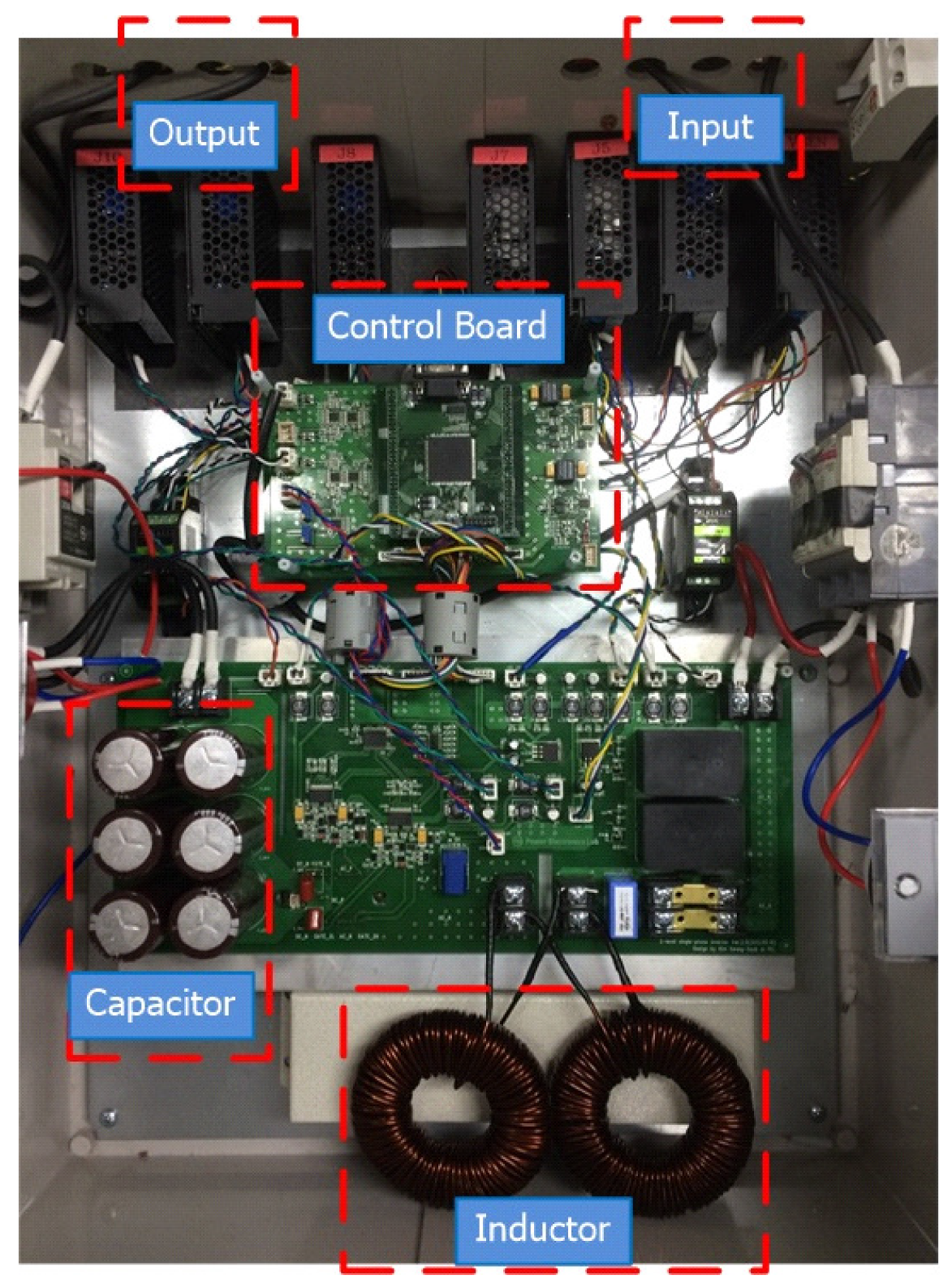
5. Experimental Results
- (Inner Loop)
- (Outer Loop)whose PI gains were designed for the inner and outer loop cut-off frequencies at and , respectively. The following subsections compare the proposed and FL controllers in both the qualitative and quantitative manners using the performance metric .
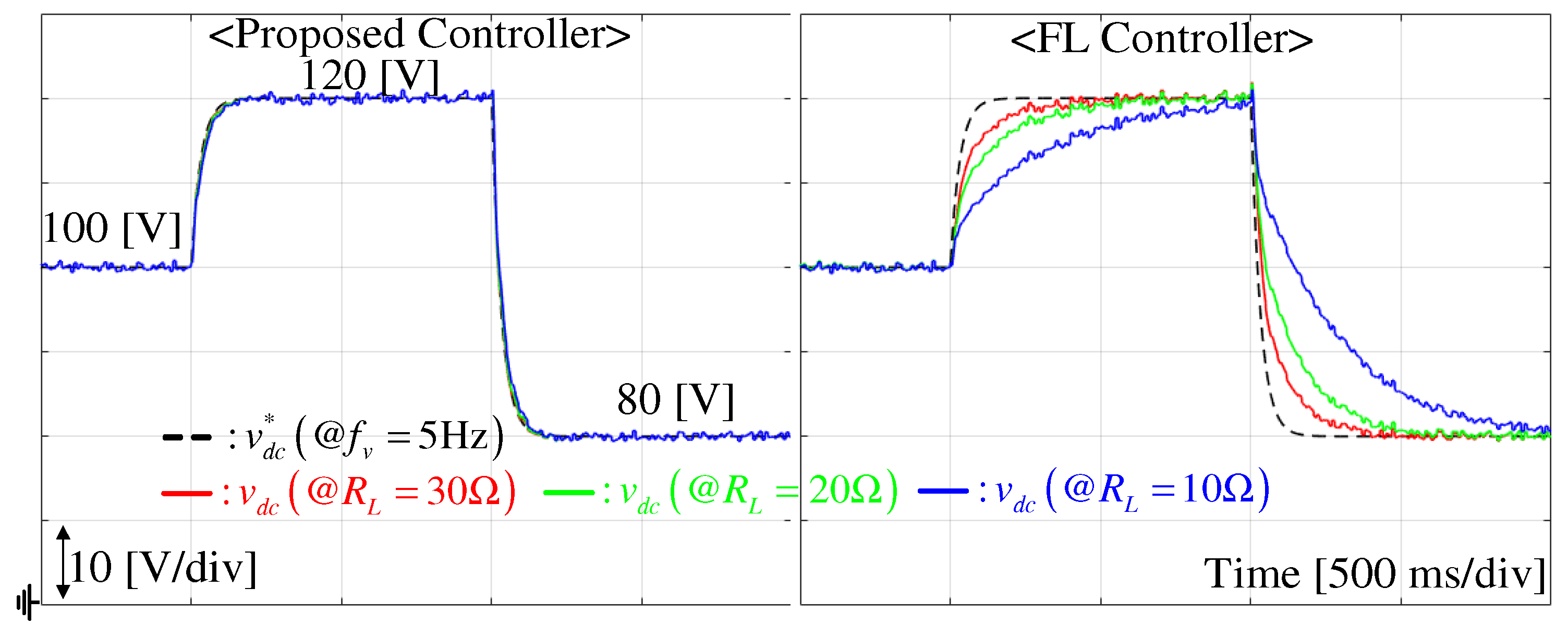
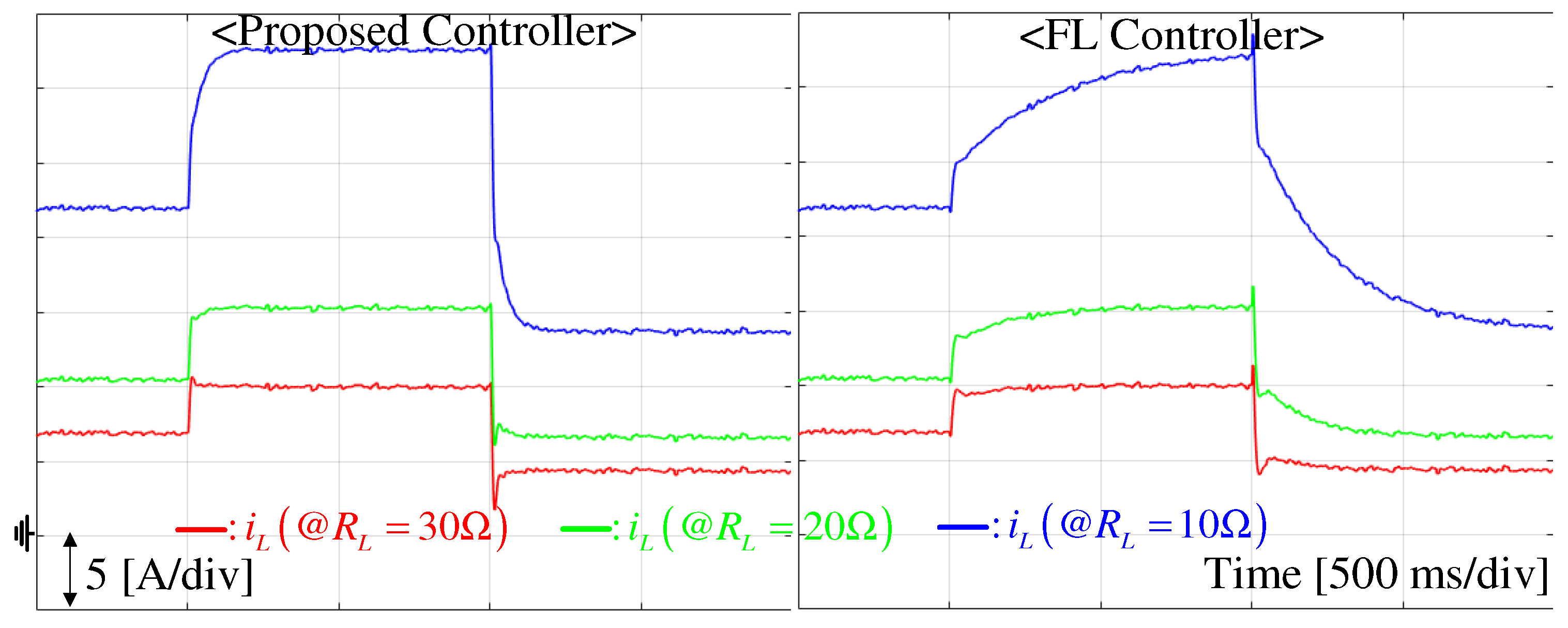
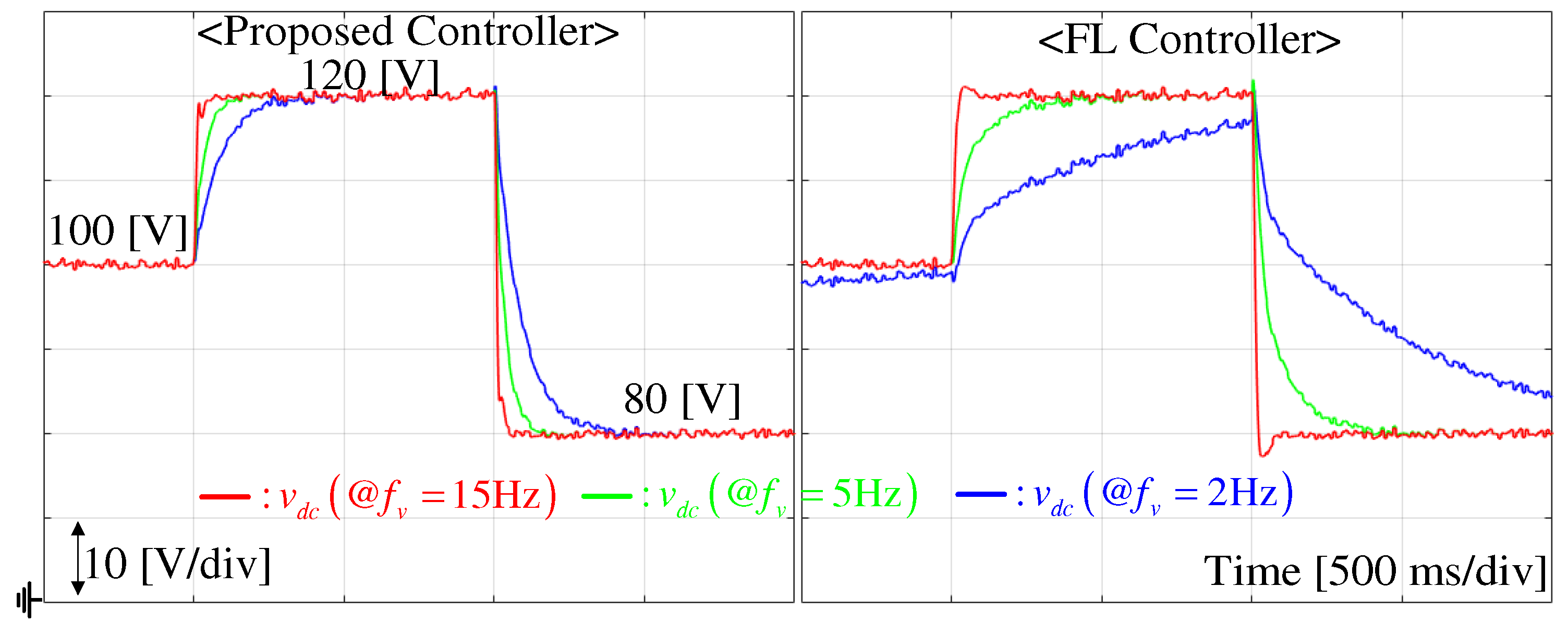
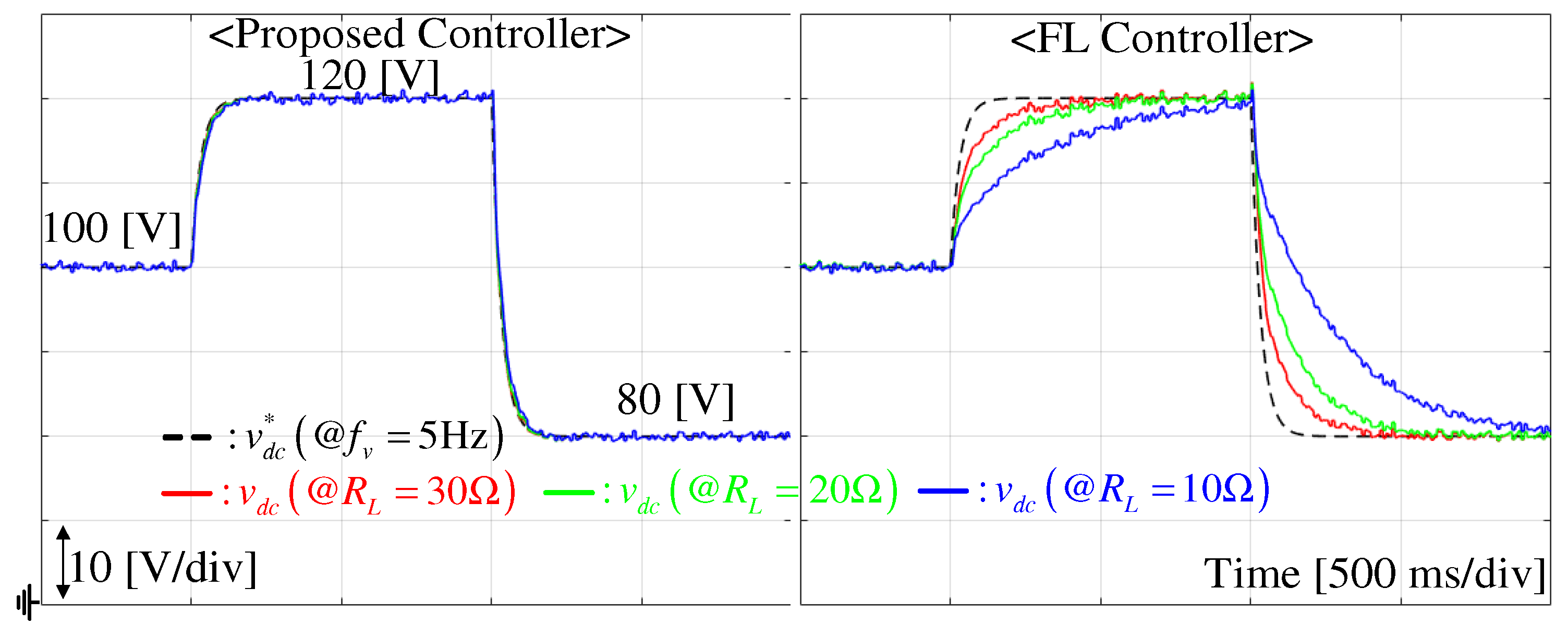
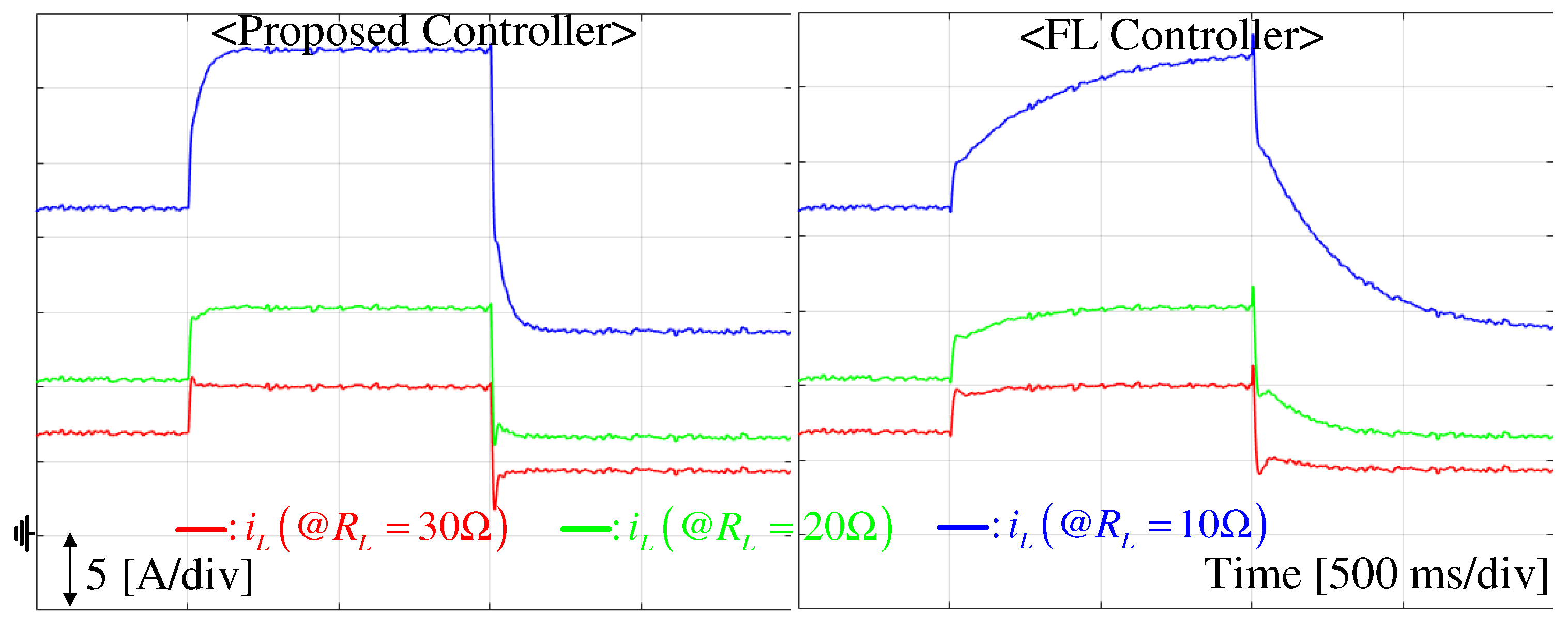
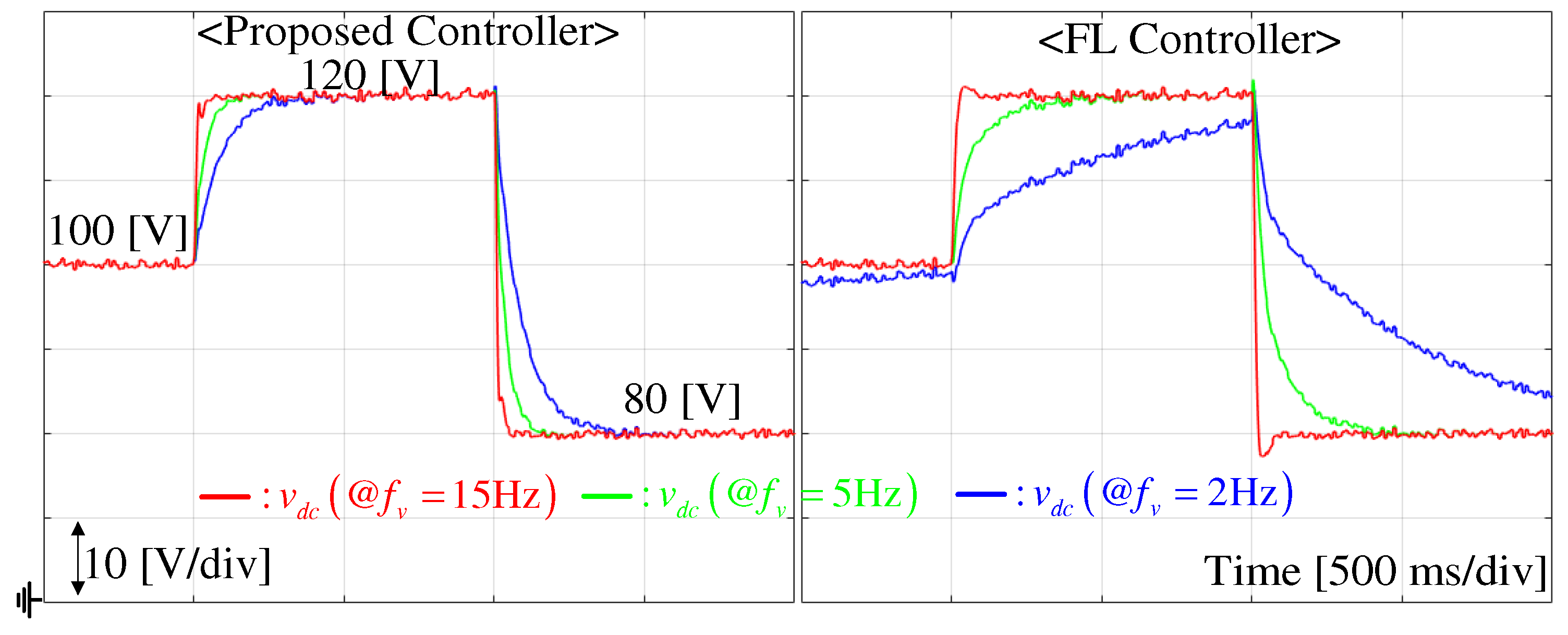
5.1. Pulse Reference Tracking Performance Comparison
5.2. Constant Reference Regulation Performance Comparison
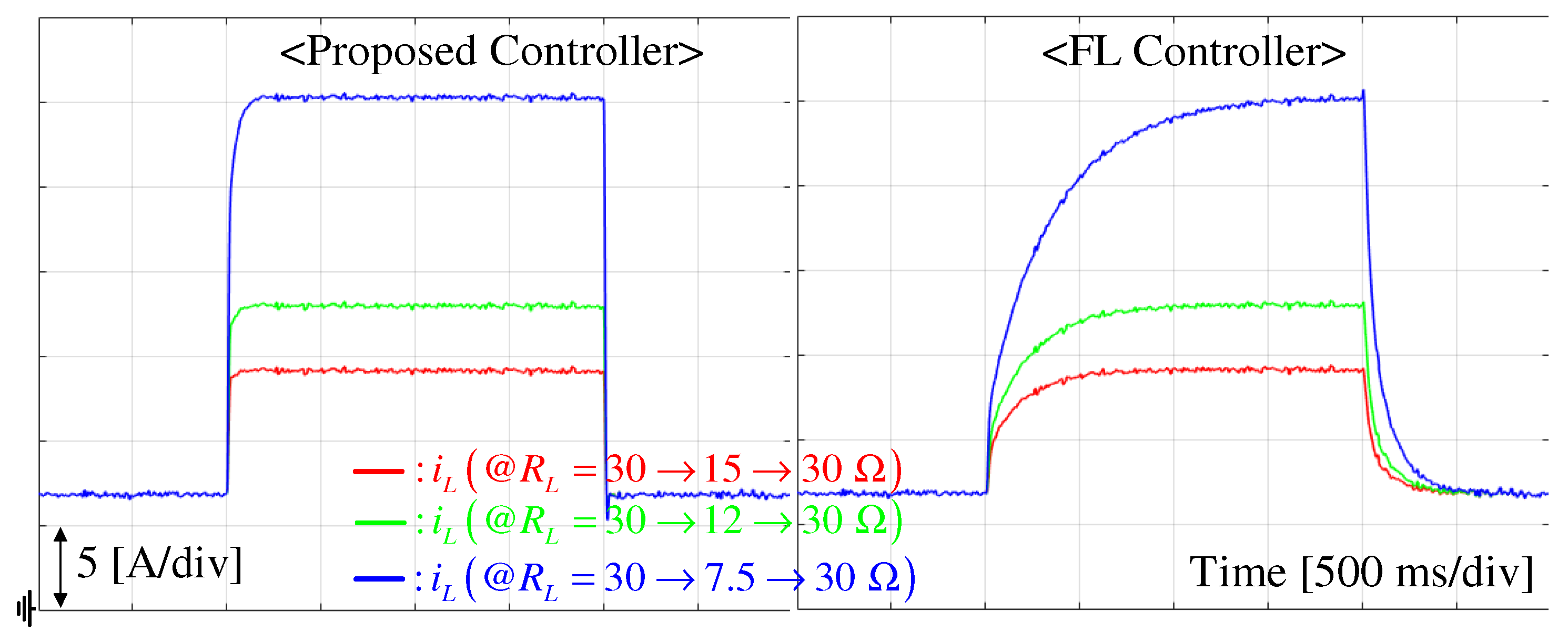
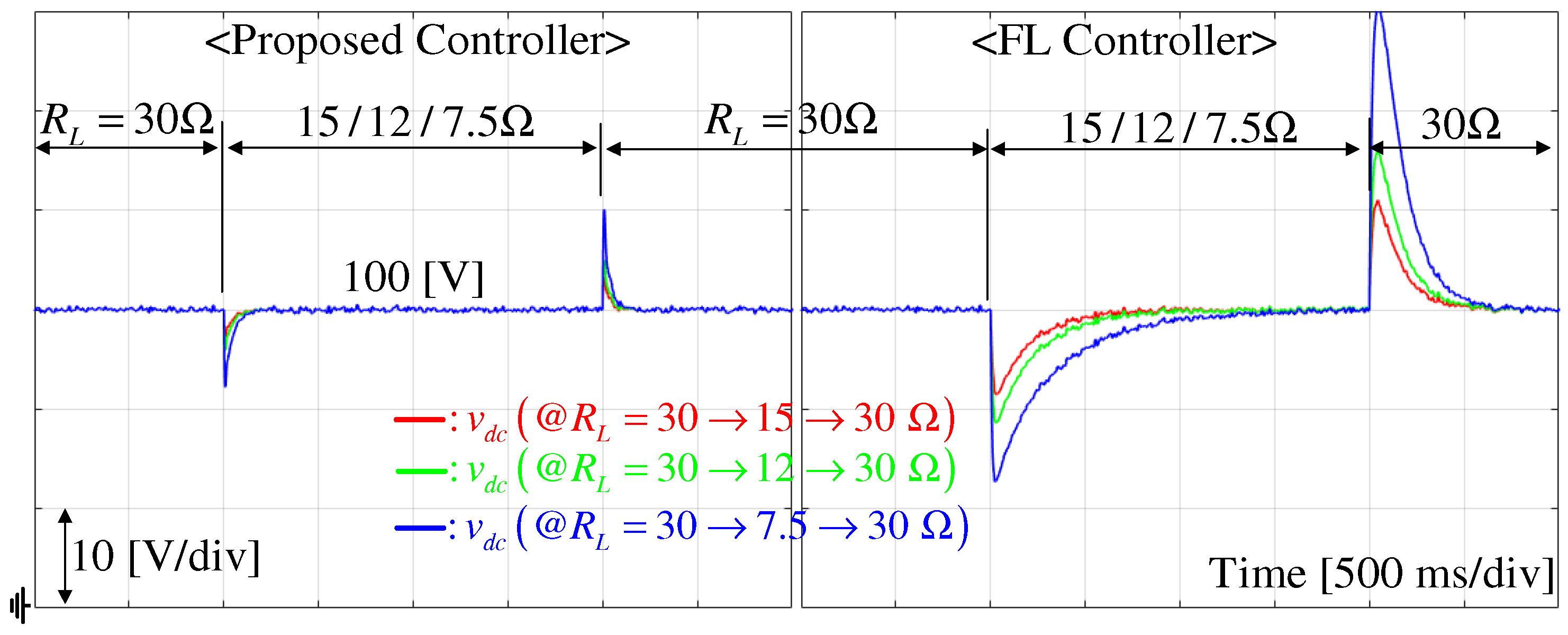
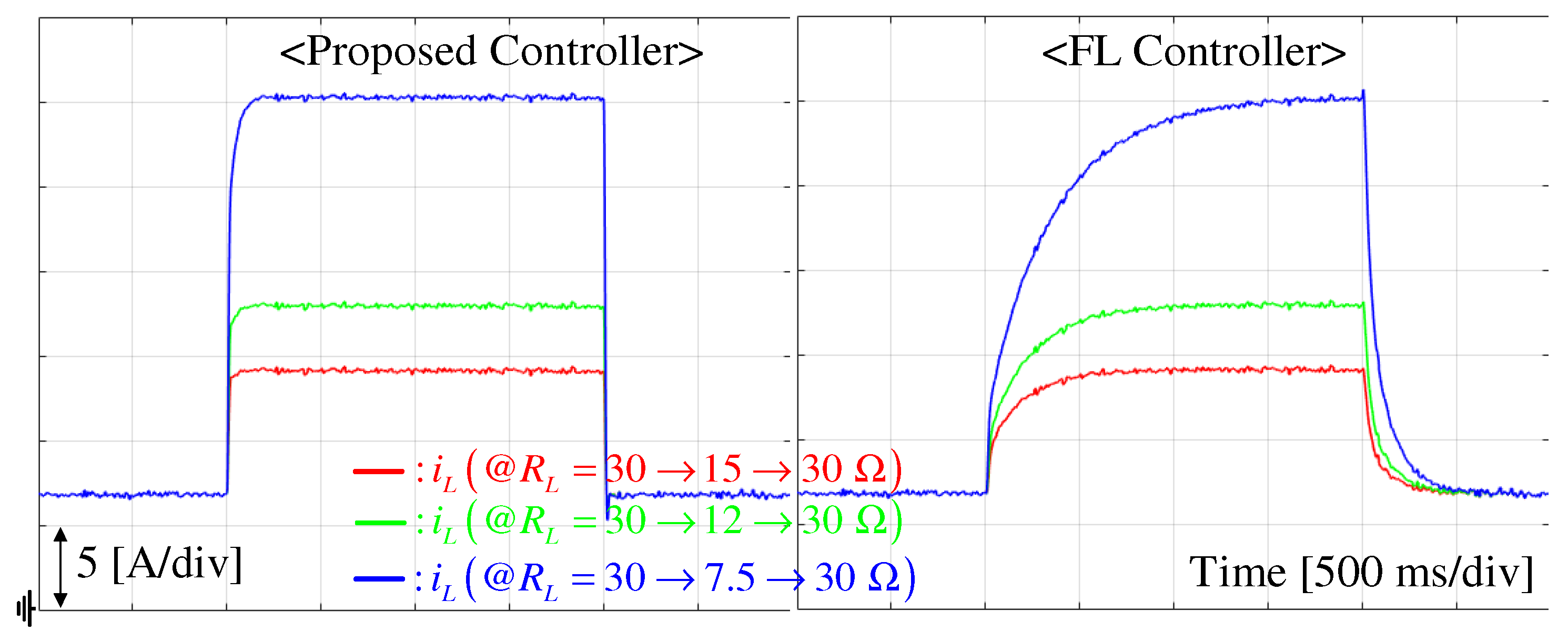
5.3. Pulse Reference Performance Variation Comparison
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Choi, K.; Kim, D.; Kim, S.K. Disturbance Observer-Based Offset-Free Global Tracking Control for Input-Constrained LTI Systems with DC/DC Buck Converter Applications. Energies 2020, 13, 4079. [Google Scholar] [CrossRef]
- Chen, Y.C.; Chen, L.R.; Lai, C.M.; Lin, Y.C.; Kuo, T.J. Development of a DC-Side Direct Current Controlled Active Ripple Filter for Eliminating the Double-Line-Frequency Current Ripple in a Single-Phase DC/AC Conversion System. Energies 2020, 13, 4772. [Google Scholar] [CrossRef]
- Li, J.; Tang, J.; Wang, X.; Xiong, B.; Zhan, S.; Zhao, Z.; Hou, H.; Qi, W.; Li, Z. Optimal Placement of IoT-Based Fault Indicator to Shorten Outage Time in Integrated Cyber-Physical Medium-Voltage Distribution Network. Energies 2020, 13, 4928. [Google Scholar] [CrossRef]
- Silva, F.; Carvalho, P.; Ferreira, L. Improving PV Resilience by Dynamic Reconfiguration in Distribution Grids: Problem Complexity and Computation Requirements. Energies 2021, 14, 830. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics, 2nd ed.; Springer: New York, NY, USA, 2001. [Google Scholar]
- Kapat, S.; Patra, A. A Current-Controlled Tristate Boost Converter with Improved Performance Through RHP Zero Elimination. IEEE Trans. Power Electron. 2009, 24, 776–786. [Google Scholar] [CrossRef]
- Alexander, G.P.; Feng, G.; Yan-Fei, L.; Paresh, C.S. A Design Method for PI-like Fuzzy Logic Controllers for DC/DC Converter. IEEE Trans. Ind. Electron. 2007, 54, 2688–2696. [Google Scholar]
- Kapat, S.; Krein, P.T. Formulation of PID Control for DC-DC Converters Based on Capacitor Current: A Geometric Context. IEEE Trans. Power Electron. 2012, 27, 1424–1432. [Google Scholar] [CrossRef]
- Kazmierkowski, M.P.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics—Selected Problems; Academic Press: Cambridge, MA, USA, 2002. [Google Scholar]
- Bibian, S.; Jin, H. High Performance Predictive Dead-Beat Digital Controller for DC Power Supplies. IEEE Trans. Power Electron. 2002, 17, 420–427. [Google Scholar] [CrossRef]
- Zhang, Q.; Min, R.; Tong, Q.; Zou, X.; Liu, Z.; Shen, A. Sensorless Predictive Current Controlled DC-DC Converter With a Self-Correction Differential Current Observer. IEEE Trans. Ind. Electron. 2014, 61, 6747–6757. [Google Scholar] [CrossRef]
- Oucheriah, S.; Guo, L. PWM-Based Adaptive Sliding-Mode Control for Boost DC/DC Converters. IEEE Trans. Ind. Electron. 2013, 60, 3291–3294. [Google Scholar] [CrossRef]
- Wang, Y.X.; Yu, D.H.; Kim, Y.B. Robust Time-Delay Control for the DC/DC Boost Converter. IEEE Trans. Ind. Electron. 2014, 61, 4829–4837. [Google Scholar] [CrossRef]
- He, J.; Zhang, X. An Ellipse-Optimized Composite Backstepping Control Strategy for a Point-of-Load Inverter Under Load Disturbance in the Shipboard Power System. IEEE Open J. Power Electron. 2020, 1, 420–430. [Google Scholar] [CrossRef]
- Hassan, M.A.; Li, E.; Li, X.; Li, T.; Duan, C.; Chi, S. Adaptive Passivity-Based Control of DC-DC Buck Power Converter With Constant Power Load in DC Microgrid Systems. IEEE J. Sel. Top. Power Electron. 2019, 7, 2029–2040. [Google Scholar] [CrossRef]
- Kim, S.-K.; Lee, K.-B. Robust Feedback-Linearizing Output Voltage Regulator for DC/DC Boost Converter. IEEE Trans. Ind. Electron. 2015, 62, 7127–7135. [Google Scholar] [CrossRef]
- Theunisse, T.A.F.; Chai, J.; Sanfelice, R.G.; Heemels, W.P.M.H. Robust Global Stabilization of the DC-DC Boost Converter via Hybrid Control. IEEE Trans. Circuits Syst. I Regul. Pap. 2015, 62, 1052–1061. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Wu, B.; Li, S.; Yu, X. Design and Qualitative Robustness Analysis of an DOBC Approach for DC-DC Buck Converters With Unmatched Circuit Parameter Perturbations. IEEE Trans. Circuits Syst. I Regul. Pap. 2016, 63, 551–560. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, C.; Wen, C.; Wang, P. A Novel Composite Nonlinear Controller for Stabilization of Constant Power Load in DC Microgrid. IEEE Trans. Smart Grid 2019, 10, 752–761. [Google Scholar] [CrossRef]
- Kim, S.-K. Output Voltage-Tracking Controller with Performance Recovery Property for DC/DC Boost Converters. IEEE Trans. Control Syst. Technol. 2018, 27, 1301–1307. [Google Scholar] [CrossRef]
- Kim, S.-K.; Ahn, C.K. Nonlinear Tracking Controller for DC/DC Boost Converter Voltage Control Applications via Energy-Shaping and Invariant Dynamic Surface Approach. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 1855–1859. [Google Scholar] [CrossRef]
- Kim, S.-K.; Kim, K.-C.; Ahn, C.K. Output-voltage-tracking Control for Buck Converters using Variable Convergence Rate Mechanism without Current Feedback. IEEE Trans. Ind. Electron. 2021, in press. [Google Scholar] [CrossRef]
- Lee, K.; Lee, J.; Lee, Y.I. Robust Model Predictive Speed Control of Induction Motors Using a Constrained Disturbance Observer. Int. J. Control Autom. Syst. 2020, 18, 1539–1549. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
You, S.H.; Bonn, K.; Kim, D.S.; Kim, S.-K. Cascade-Type Pole-Zero Cancellation Output Voltage Regulator for DC/DC Boost Converters. Energies 2021, 14, 3824. https://doi.org/10.3390/en14133824
You SH, Bonn K, Kim DS, Kim S-K. Cascade-Type Pole-Zero Cancellation Output Voltage Regulator for DC/DC Boost Converters. Energies. 2021; 14(13):3824. https://doi.org/10.3390/en14133824
Chicago/Turabian StyleYou, Sung Hyun, Koo Bonn, Dong Soo Kim, and Seok-Kyoon Kim. 2021. "Cascade-Type Pole-Zero Cancellation Output Voltage Regulator for DC/DC Boost Converters" Energies 14, no. 13: 3824. https://doi.org/10.3390/en14133824
APA StyleYou, S. H., Bonn, K., Kim, D. S., & Kim, S.-K. (2021). Cascade-Type Pole-Zero Cancellation Output Voltage Regulator for DC/DC Boost Converters. Energies, 14(13), 3824. https://doi.org/10.3390/en14133824