
Power Hardware-in-the-Loop-Based Performance Analysis of Different Converter Controllers for Fast Active Power Regulation in Low-Inertia Power Systems

 ,
,  ,
, 
 ,
,
Abstract
1. Motivation behind the Proposed PHIL Setup
2. The Developed PHIL Test Setup for the Testing of FAPR Control Strategies
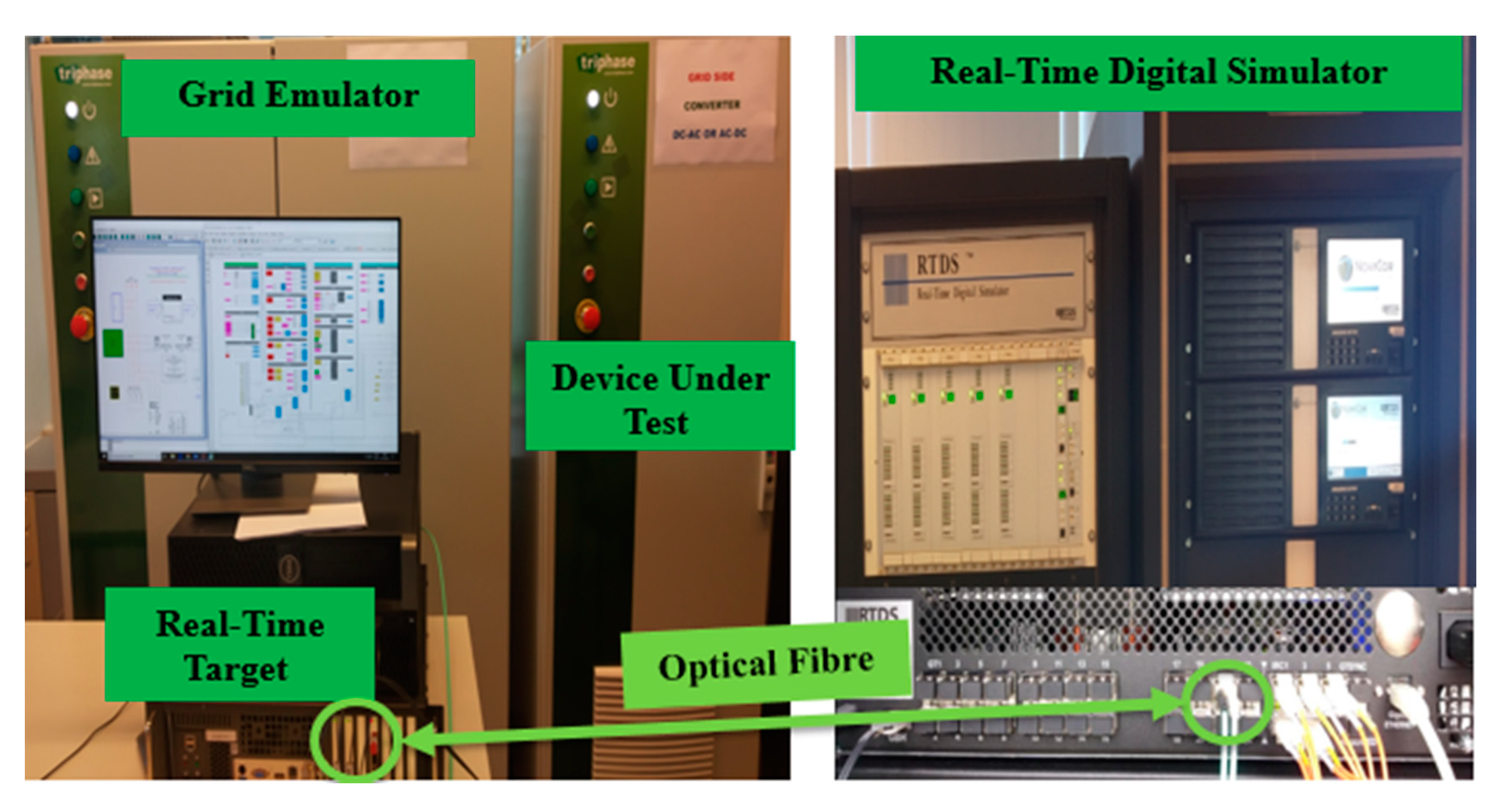
2.1. Conceptual Overview of the Proposed PHIL Setup
2.2. Working Principle of the PHIL Setup
- The real-time EMT representation of the studied system is performed in RSCAD [22] and runs in NovaCor, which can be interfaced with external physical devices (e.g., DUT).
- The control strategies to subordinate the grid emulator and the DUT are implemented using the RTT. The implementation is done through a combined environment of Triphase (Triphase Technologies, Bangalore, India) and Matlab/Simulink (MathWorks, Natick, MA, USA). The RTT and NovaCor exchange signals (e.g., waveforms of voltages and currents) through an optical fiber.
- The RTDS sends setpoints to RTT. These setpoints govern the instantaneous voltage of the grid emulator as well as the setpoints for the output current of the DUT.
- The Aurora protocol is applied for the bidirectional transfer of information between RTDS and the RTT. The RTT has a circular inter-process communication (CIPC) buffer. The CIPC constitutes a distributed strategy for the sharing of memory through ring buffers. This facilitates the exchange of information of simulations from Matlab/Simulink control and signal processing models that are compiled in the RTT. Each buffer has a writer block that writes data into the buffer, from which multiple readers can read out the data. The Simulink model has blocks to perform write/read bus definitions. The bus definitions contain the names and sizes of the signals extracted from the read block. It should be ensured that the same bus name previously defined as the input/output bus name is used in the write/read blocks. In this way, 256 signals can be exchanged between the RTT and the RTDS.
- The simulated instantaneous voltage from the system model running in RSCAD-RTDS is given to the RTT to reproduce the desired voltage waveform (with the same frequency but with smaller amplitude) at the AC side (i.e., the point of interconnection of the DUT) of the VSC of the grid emulator.
- Since the RTDS and the RTT run simultaneously in real time, there exists the freedom to choose RSCAD or Simulink to implement each of the selected FAPR strategies. The current reference signals are affected by the implemented FAPR strategies. The VSC (DUT), which is connected to grid emulator with virtual PCC conditions injects active power based on the modulated active current reference (Id_ref).
3. Description of FAPR Control Strategies under Study
- Droop-based FAPR strategy
- Droop-derivative-based FAPR strategy
- VSP-based FAPR strategy
3.1. Droop-Based FAPR Strategy
3.2. The Droop-Derivative Based FAPR Strategy
3.3. The Virtual Synchronous Power (VSP)-Based FAPR Control Strategy
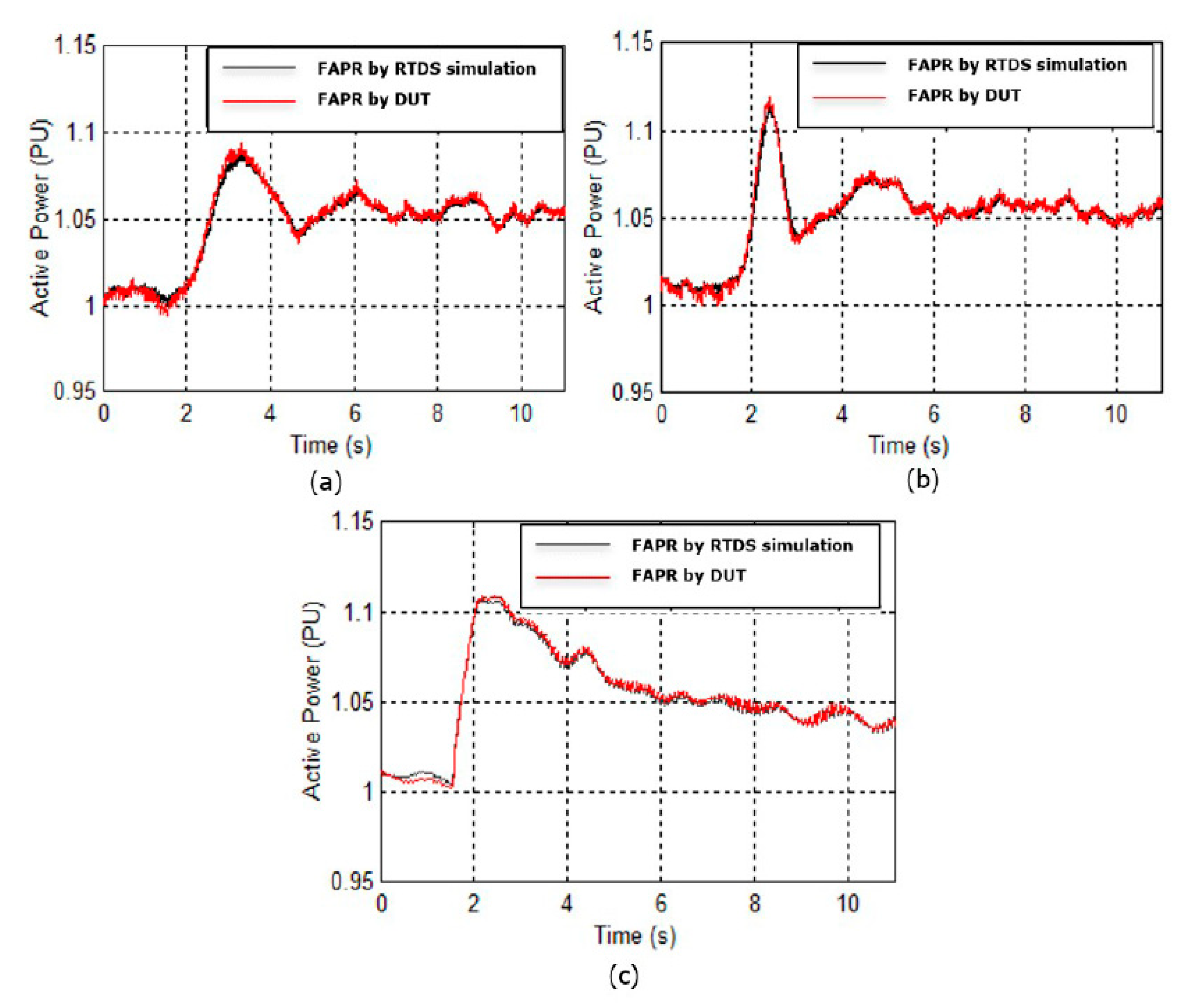
4. Experimental Testing of FAPR Control Strategies through PHIL
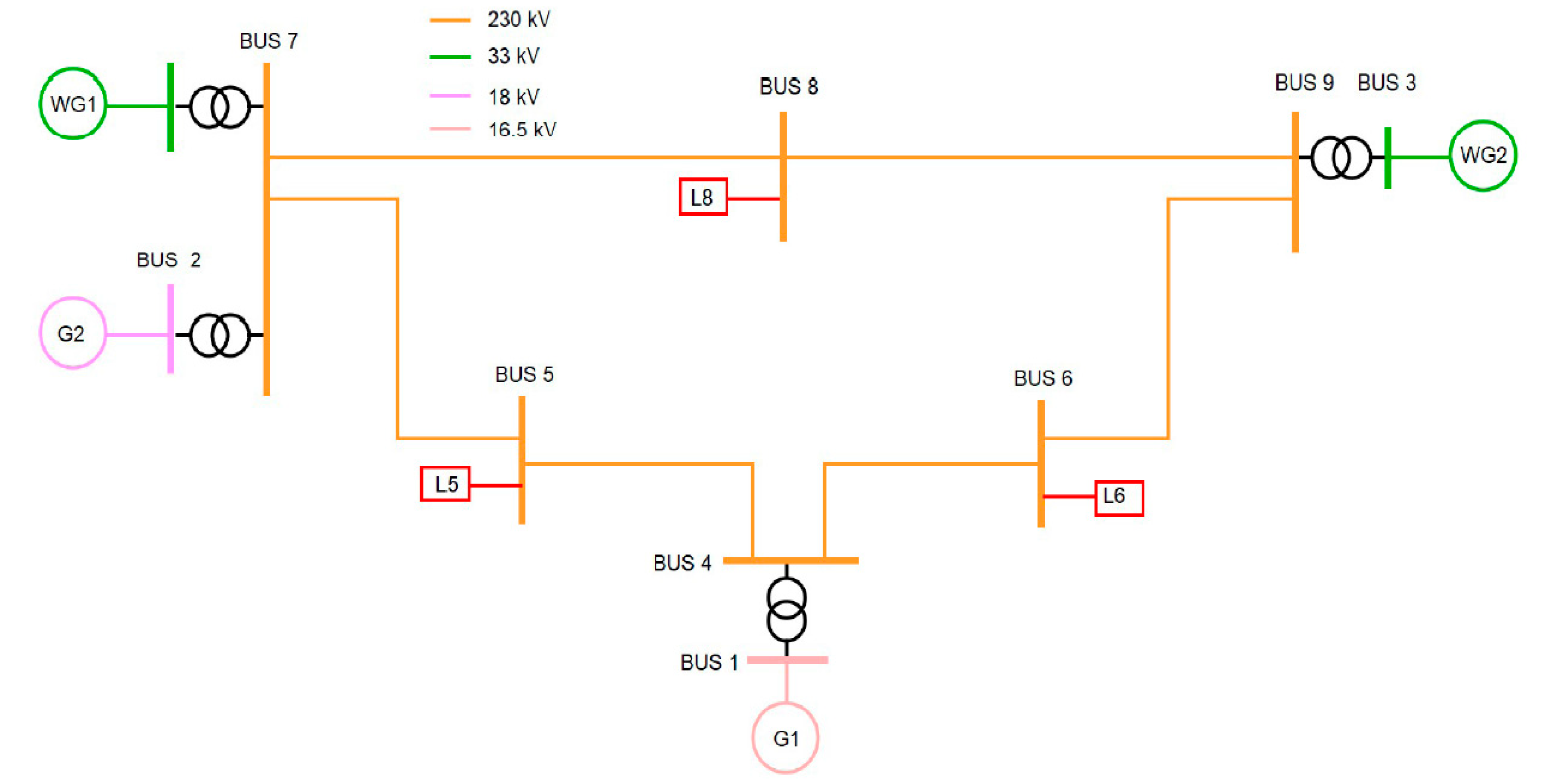
- The RTDS Nova Core was used to compile and run the system under study (cf. Figure 8).
- The time-varying samples of voltage and frequency (e.g., measured at bus 7 in Figure 8) were transferred from RTDS to the RTT by using the Aurora protocol. These voltage and frequency values were taken as a reference to create the voltage waveform of the grid emulator, which is connected to the AC side of the DUT.
- The active power and reactive power at the AC side of the DUT were controlled by Id_ref and Iq_ref.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Blaabjerg, F.; Ma, K. Future on power electronics for wind turbine systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 139–152. [Google Scholar] [CrossRef]
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A review of the state of the art of power electronics for wind turbines. IEEE Trans. Power Electron. 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Ma, K. Power electronics converters for wind turbine systems. IEEE Trans. Ind. Appl. 2012, 48, 708–719. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Ha, F.; Abdennour, A. Optimal use of kinetic energy for the inertial support from variable speed wind turbines. Renew. Energy 2015, 80, 629–643. [Google Scholar]
- Mishra, S.; Zarina, P.P. A Novel Controller for Frequency Regulation in a Hybrid System with High PV Penetration. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Josephine, R.L.; Suja, S. Estimating PMSG Wind Turbines by Inertia and Droop Control Schemes with Intelligent Fuzzy Controller in Indian Development. Electr. Eng. Technol. 2014, 9, 1196–1201. [Google Scholar] [CrossRef]
- Yao, W.; Lee, K.Y. A Control Configuration of Wind Farm for Load-following and Frequency Support by Considering the Inertia Issue. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 24–28 July 2011; pp. 1–6. [Google Scholar]
- Engelken, S.; Mendonca, A.; Fischer, M. Inertial response with improved variable recovery behaviour provided by type 4 WTs. IET Renew. Power Gener. Spec. 2017, 11, 195–201. [Google Scholar] [CrossRef]
- Rakhshani, E.; Rodriguez, P. Inertia Emulation in AC/DC Interconnected Power. IEEE Trans. POWER Syst. 2017, 32, 3338–3351. [Google Scholar] [CrossRef]
- Gonzalez-Longatt, F.; Chikuni, E.; Rashayi, E. Effects of the Synthetic Inertia from Wind Power on the Total System Inertia after a Frequency Disturbance. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; pp. 826–832. [Google Scholar]
- Ackermann, T. Wind Power in Power Systems, 2nd ed.; Wiley: Hoboken, NJ, USA, 2005; Volume 140. [Google Scholar]
- Rakhshani, E.; Remon, D.; Cantarellas, A.M.; Rodriguez, P. Analysis of derivative control based virtual inertia in multi-area high-voltage direct current interconnected power systems. IET Gener. Transmiss. Distrib. 2016, 10, 1458–1469. [Google Scholar] [CrossRef]
- Rakhshani, E.; Remon, D.; Cantarellas, A.M.; Garcia, J.M.; Rodriguez, P. Virtual Synchronous Power Strategy for Multiple Power Systems. IEEE Trans. Power Syst. 2017, 32, 1665–1677. [Google Scholar] [CrossRef]
- Beck, H.-P.; Hesse, R. Virtual synchronous machine. In Proceedings of the 9th EPQU, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- Driesen, J.; Visscher, K. Virtual synchronous generators. In Proceedings of the IEEE PESGM, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–3. [Google Scholar]
- Zhong, Q.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Yan, X.; Mohamed, S.Y.A. Comparison of virtual synchronous generators dynamic responses. In Proceedings of the 2018 IEEE 12th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2018), Doha, Qatar, 10–12 April 2018; pp. 1–6. [Google Scholar]
- Soni, N.; Doolla, S.; Chandorkar, M.C. Improvement of transient response in microgrids using virtual inertia. IEEE Trans. Power Deliv. 2013, 28, 1830–1838. [Google Scholar] [CrossRef]
- RTDS Technologies Inc. The Simulator-Hardware. Available online: https://www.rtds.com/thesimulator/our-hardware (accessed on 3 February 2021).
- RTDS Technologies Inc., RSCAD Modules. Available online: https://www.rtds.com/thesimulator/our-software/rscad-modules (accessed on 3 February 2021).
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. On the Inertia of Future More-Electronics Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2130–2146. [Google Scholar] [CrossRef]
- Veerakumar, N.; Ahmad, Z.; Adabi, M.E.; Torres, J.R.; Palensky, P.; van der Meijden, M.; Gonzalez-Longatt, F. Fast Active Power-Frequency Support Methods by Large Scale Electrolyzers for Multi-Energy Systems. In Proceedings of the 2020 IEEE PES Innovative Smart Grid Technologies Europe (ISGT-Europe), The Hague, The Netherlands, 26–28 October 2020; pp. 151–155. [Google Scholar] [CrossRef]
- Rakhshani, E.; Perilla, A.; Veerakumar, N.; Ahmad, Z.; Rueda Torres, J.; van der Meijden, M.; Palensky, P. Analysis and tuning methodology of FAPI controllers for maximising the share of grid-connected wind generations. IET Renew. Power Gener. 2020, 14, 3816–3823. [Google Scholar] [CrossRef]
- Rakhshani, E.; Remon, D.; Cantarellas, A.M.; Garcia, J.M.; Rodriguez, P. Modeling and sensitivity analyses of VSP based virtual inertia controller in HVDC links of interconnected power systems. Electr. Power Syst. Res. 2016, 141, 246–263. [Google Scholar] [CrossRef]
- Gonzalez-Longatt, F.M.; Bonfiglio, A.; Procopio, R.; Verduci, B. Evaluation of inertial response controllers for full-rated power converter wind turbine (Type 4). In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–18 July 2016; pp. 1–5. [Google Scholar]
- International Review of Frequency Control Adaptation, Australia Energy Market Operator. Melbourne, VIC, Australia. 2017. Available online: http://www.aemo.com.au (accessed on 3 February 2021).
- Tolbert, L.M.; Wang, F.; Tomsovic, K.; Sun, K.; Wang, J.; MA, Y.; LIU, Y. Reconfigurable Real-Time Power Grid Emulator for Systems with High Penetration of Renewables. IEEE Open Access J. Power Energy 2020, 7, 489–500. [Google Scholar] [CrossRef]
- Ahmad, Z.; Torres, J.R.; Veera Kumar, N.; Rakhshani, E.; Palensky, P.; van der Meijden, M. A Power Hardware-in-the-Loop Based Method for FAPR Compliance Testing of the Wind Turbine Converters Control. Energies 2020, 13, 5203. [Google Scholar] [CrossRef]
- Cha, S.T.; Wu, Q.; Nielsen, A.H.; Østergaard, J.; Park, I.K. Real-Time Hardware-In-The-Loop (HIL) Testing for Power Electronics Controllers. In Proceedings of the 2012 Asia-Pacific Power and Energy Engineering Conference, Shanghai, China, 27–29 March 2012; pp. 1–6. [Google Scholar]
- Ahmad, Z.; Papadakis, S.; Perilla, A.; Torres, J.R.; Meijden, M.v.d. Hardware-in-the-loop based testing of wind turbine controllers for transient stability enhancement. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 1244–1249. [Google Scholar]
- Park, I.K.; Forsyth, P.; Kuffel, R.; Tara, E. Hardware in the loop (HILS) testing of a power electronics controller with RTDS. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 5386–5391. [Google Scholar]
- Fingrid—Technical Requirements for Fast Frequency Reserve Have Been Published. Electric Energy Online, Niklas Modig (Lead Editor), Robert Eriksson; Svenska Kraftnät Liisa Haarla, Pia Ruokolainen, Mikko Kuivaniemi; Fingrid Knut Styve Hornnes, Per Arne Vada; Statnett Soroush Afkhami Meybodi; Energinet Daniel Karlsson; DNV GL, 4 July 2019. Available online: Electricenergyonline.com/article/energy/category/t-d/56/778092/technical-requirements-for-fast-frequency-reserve-have-been-published.html (accessed on 3 February 2021).
- Nikolopoulou, A. Wind Turbine Contribution to Ancillary Services under Increased Renewable Penetration levels. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2017. Available online: https://repository.tudelft.nl/islandora/object/uuid%3A321a3ff0-5c7a-4c33-a891-4f0233c32ac9 (accessed on 3 February 2021).
- Oak Ridge National Laboratory. Frequency Control Concerns in the North American Electric Power System. Available online: https://info.ornl.gov/sites/publications/Files/Pub57419.pdf (accessed on 3 October 2020).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | G1 | G2 | WG1 | WG2 | L5 | L6 | L8 |
|---|---|---|---|---|---|---|---|
| MW | 73.4 | 78.2 | 82.6 | 84 | 125 | 90 | 100 |
| MVAr | 33.8 | −1.8 | 0 | 0 | 50 | 30 | 35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torres, J.R.; Ahmad, Z.; Veera Kumar, N.; Rakhshani, E.; Adabi, E.; Palensky, P.; van der Meijden, M. Power Hardware-in-the-Loop-Based Performance Analysis of Different Converter Controllers for Fast Active Power Regulation in Low-Inertia Power Systems. Energies 2021, 14, 3274. https://doi.org/10.3390/en14113274
Torres JR, Ahmad Z, Veera Kumar N, Rakhshani E, Adabi E, Palensky P, van der Meijden M. Power Hardware-in-the-Loop-Based Performance Analysis of Different Converter Controllers for Fast Active Power Regulation in Low-Inertia Power Systems. Energies. 2021; 14(11):3274. https://doi.org/10.3390/en14113274
Chicago/Turabian StyleTorres, Jose Rueda, Zameer Ahmad, Nidarshan Veera Kumar, Elyas Rakhshani, Ebrahim Adabi, Peter Palensky, and Mart van der Meijden. 2021. "Power Hardware-in-the-Loop-Based Performance Analysis of Different Converter Controllers for Fast Active Power Regulation in Low-Inertia Power Systems" Energies 14, no. 11: 3274. https://doi.org/10.3390/en14113274
APA StyleTorres, J. R., Ahmad, Z., Veera Kumar, N., Rakhshani, E., Adabi, E., Palensky, P., & van der Meijden, M. (2021). Power Hardware-in-the-Loop-Based Performance Analysis of Different Converter Controllers for Fast Active Power Regulation in Low-Inertia Power Systems. Energies, 14(11), 3274. https://doi.org/10.3390/en14113274