Floating Performance of a Composite Bucket Foundation with an Offshore Wind Tower during Transportation



Abstract

1. Introduction
- (1)
- Since the foundation is prefabricated on land, construction quality can be more easily and effectively controlled.
- (2)
- Due to the simplified construction process and greatly shortened offshore construction time, the window periods for offshore construction are increased substantially.
- (3)
- Just like “Tree Planting”, the integrated transportation-installation techniques reduce the need for large-scale offshore installation equipment, which can save cost compared with traditional technologies.
- (4)
- Because there are no driven pilings or other offshore construction process, the construction noise is minimized. In addition, the CBF can be recovered and moved as a whole, which can reduce construction waste and improve recovery of materials.
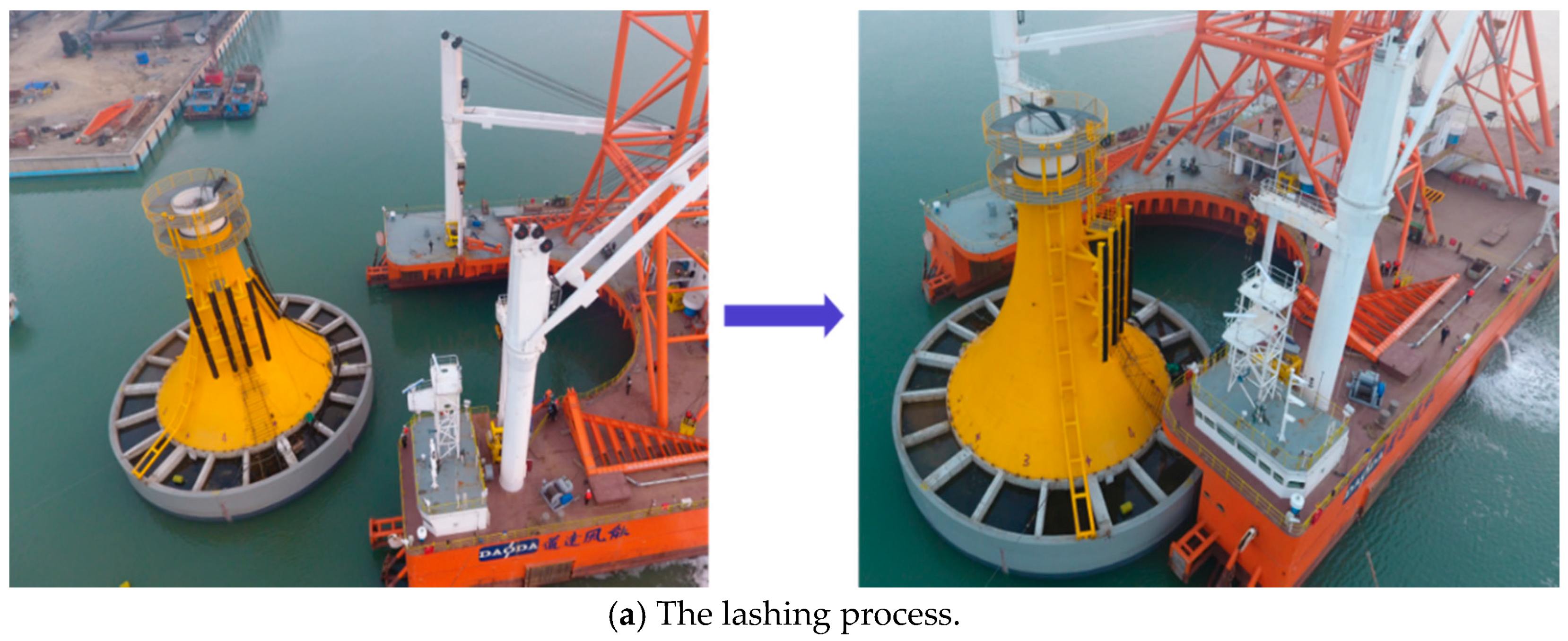
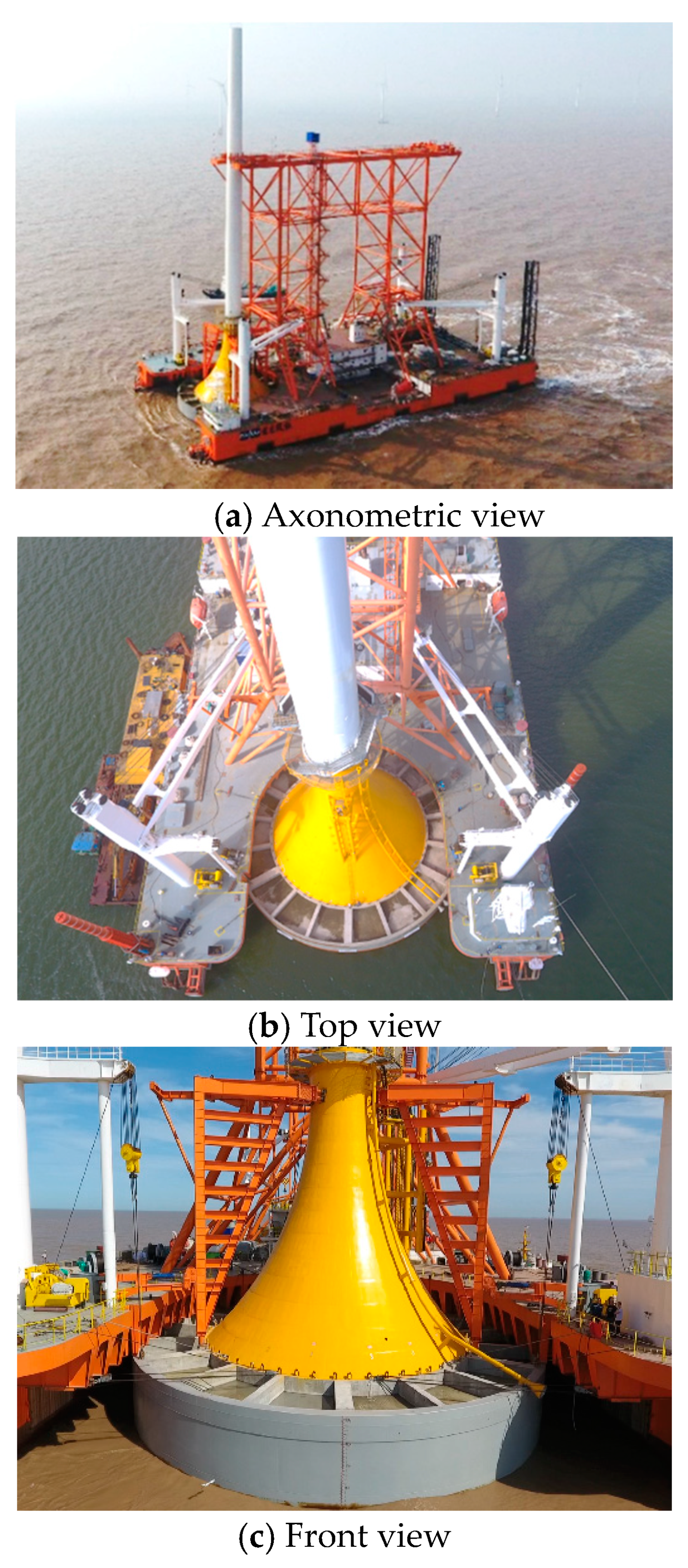
2. Towing Transport Setup
2.1. Prototype of the Integrated Transport System
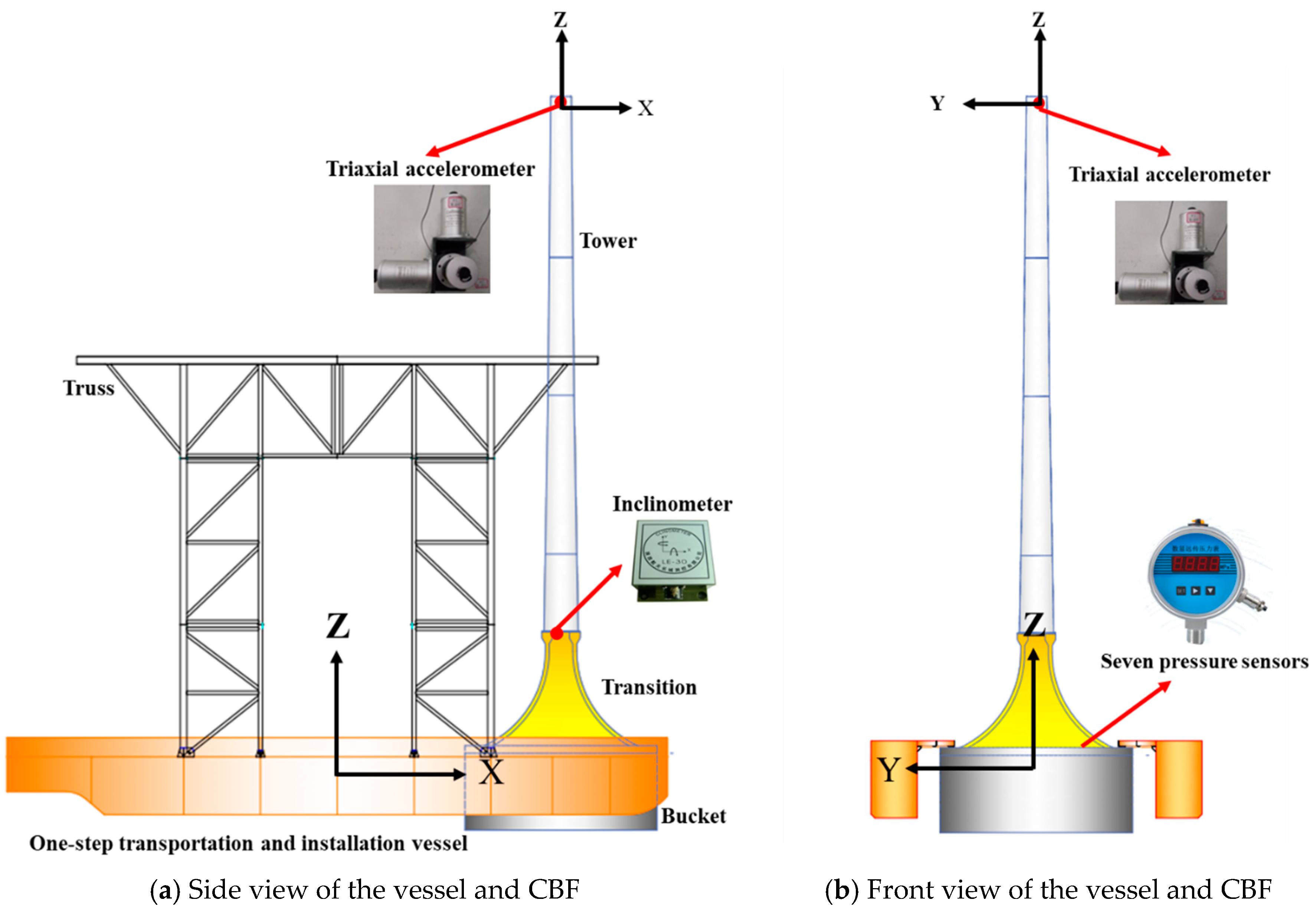
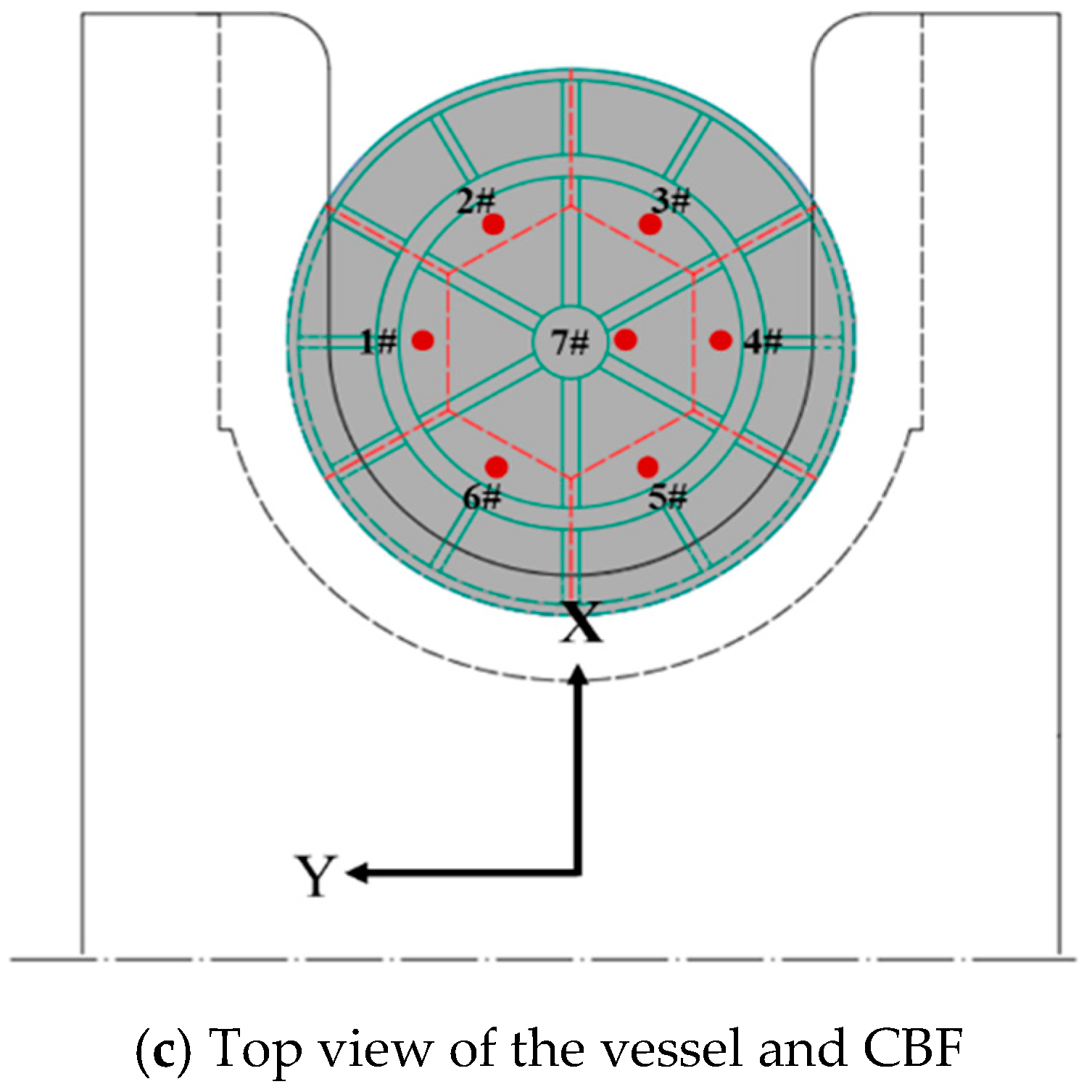
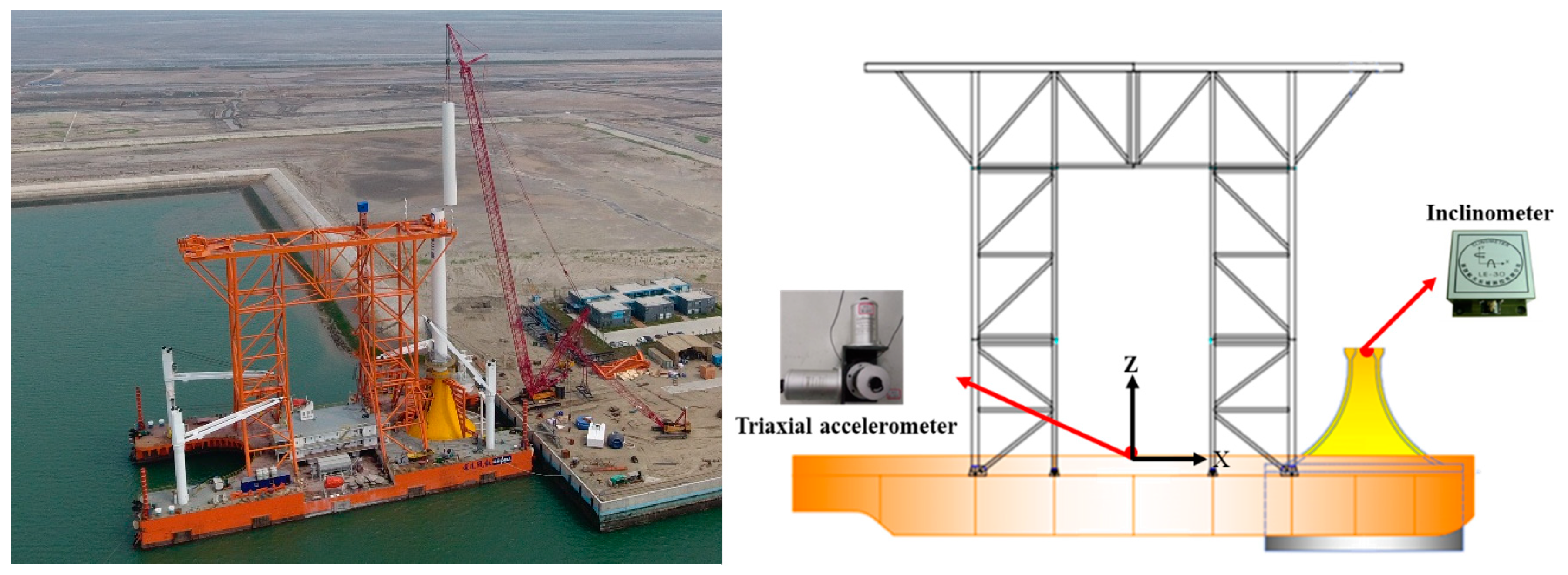
2.2. Description of the Monitoring Equipment and Conditions
3. Results and Interpretation
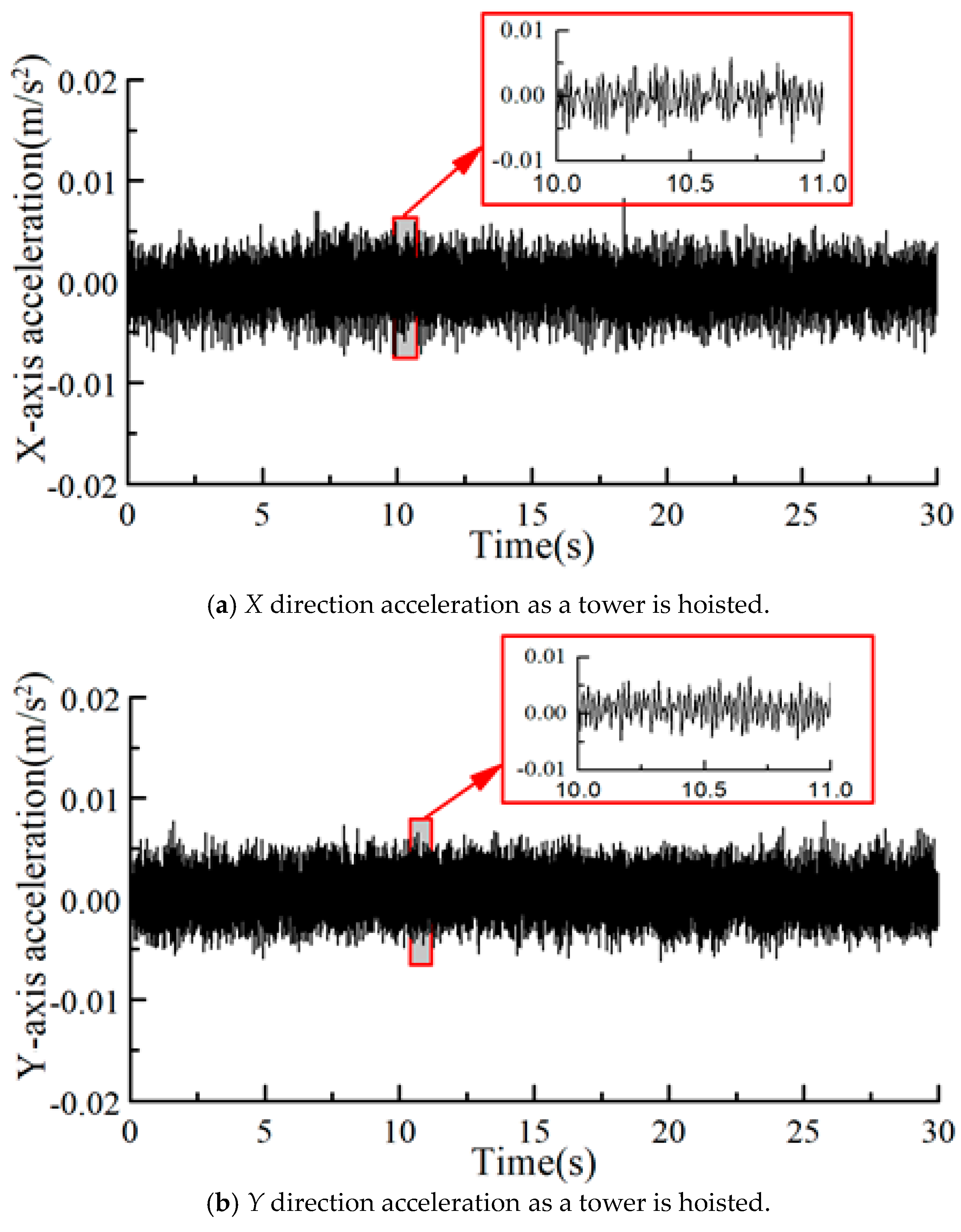
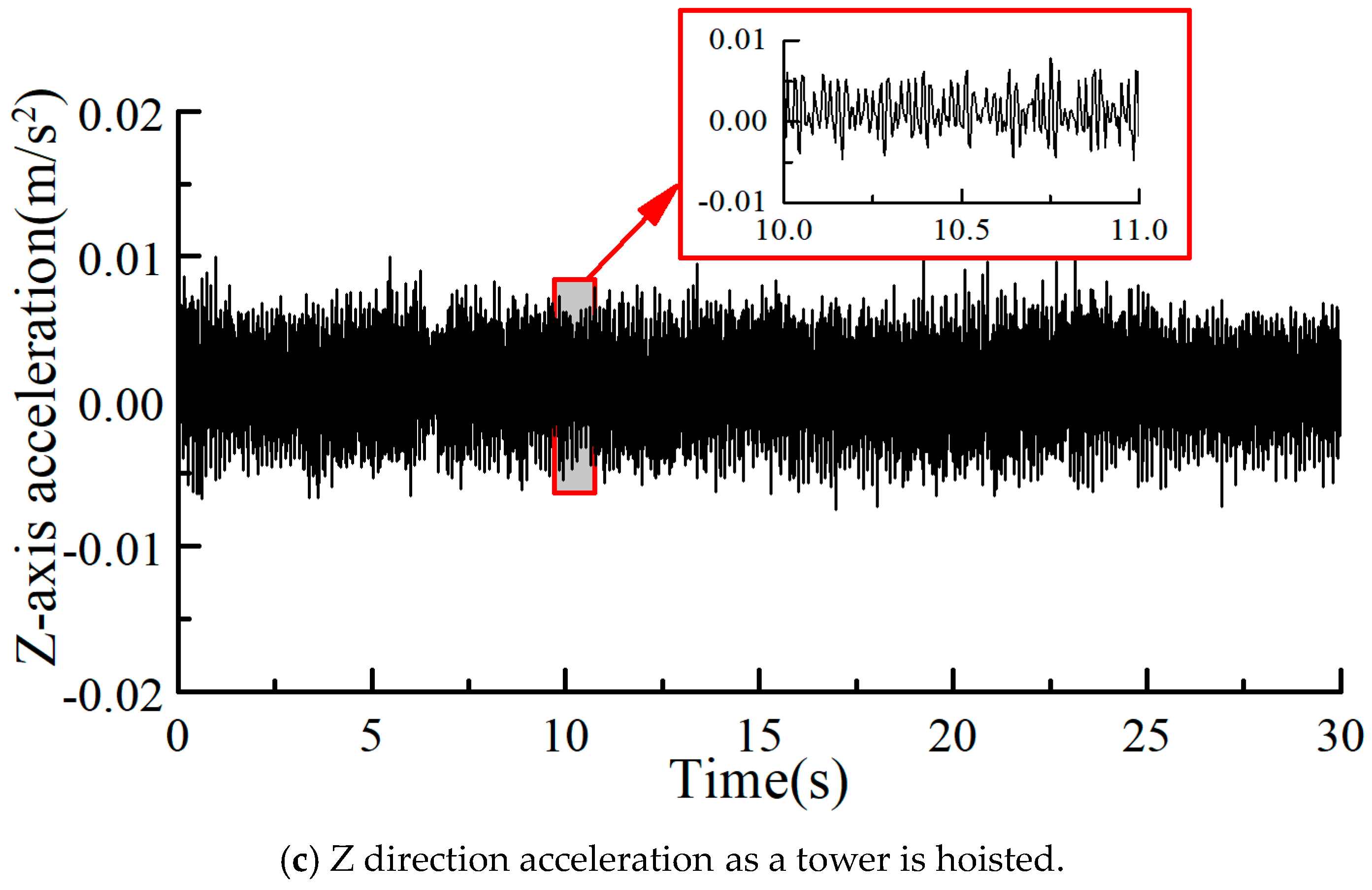
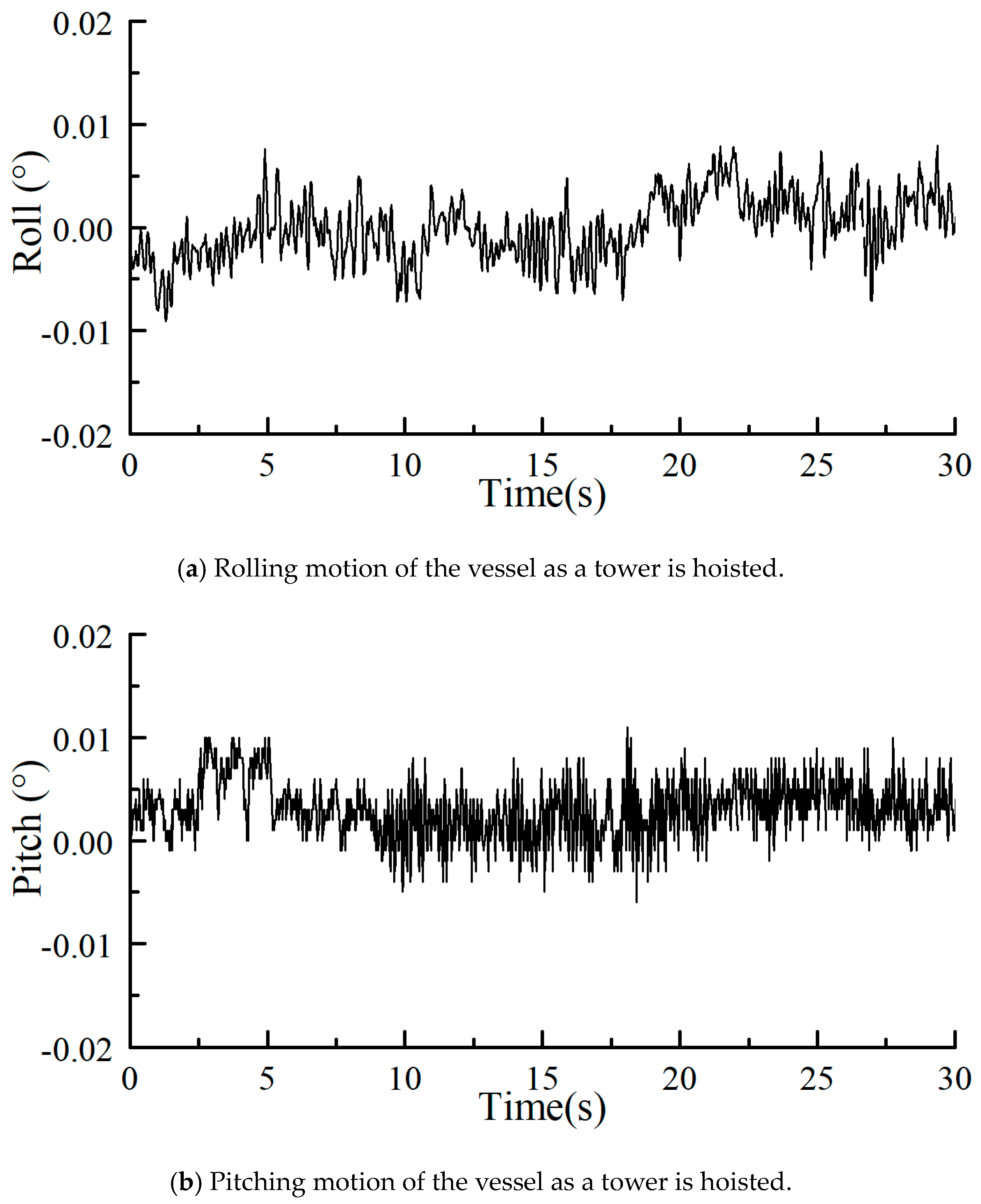
3.1. Motion Characteristics of the Vessel during Hoisting
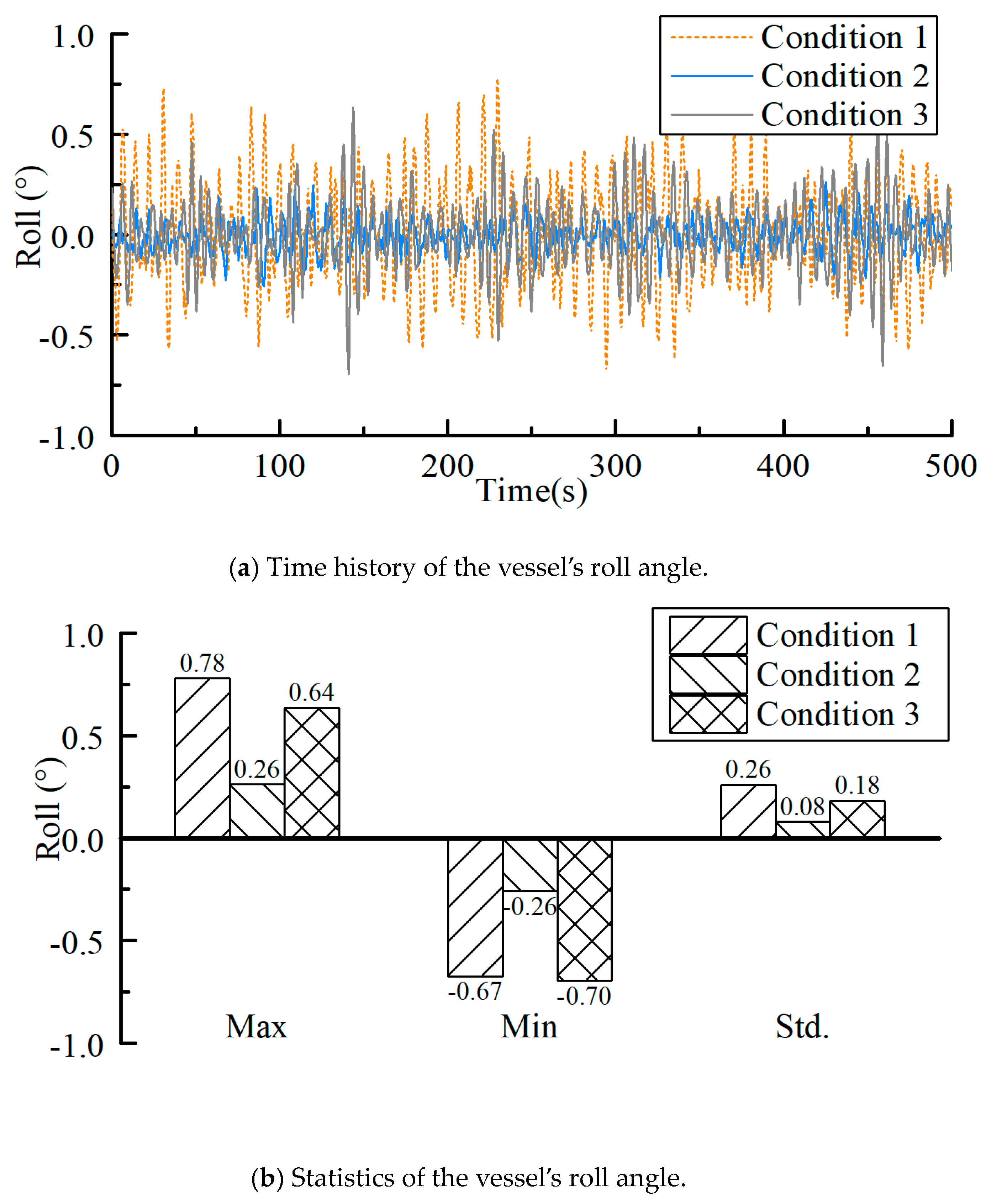
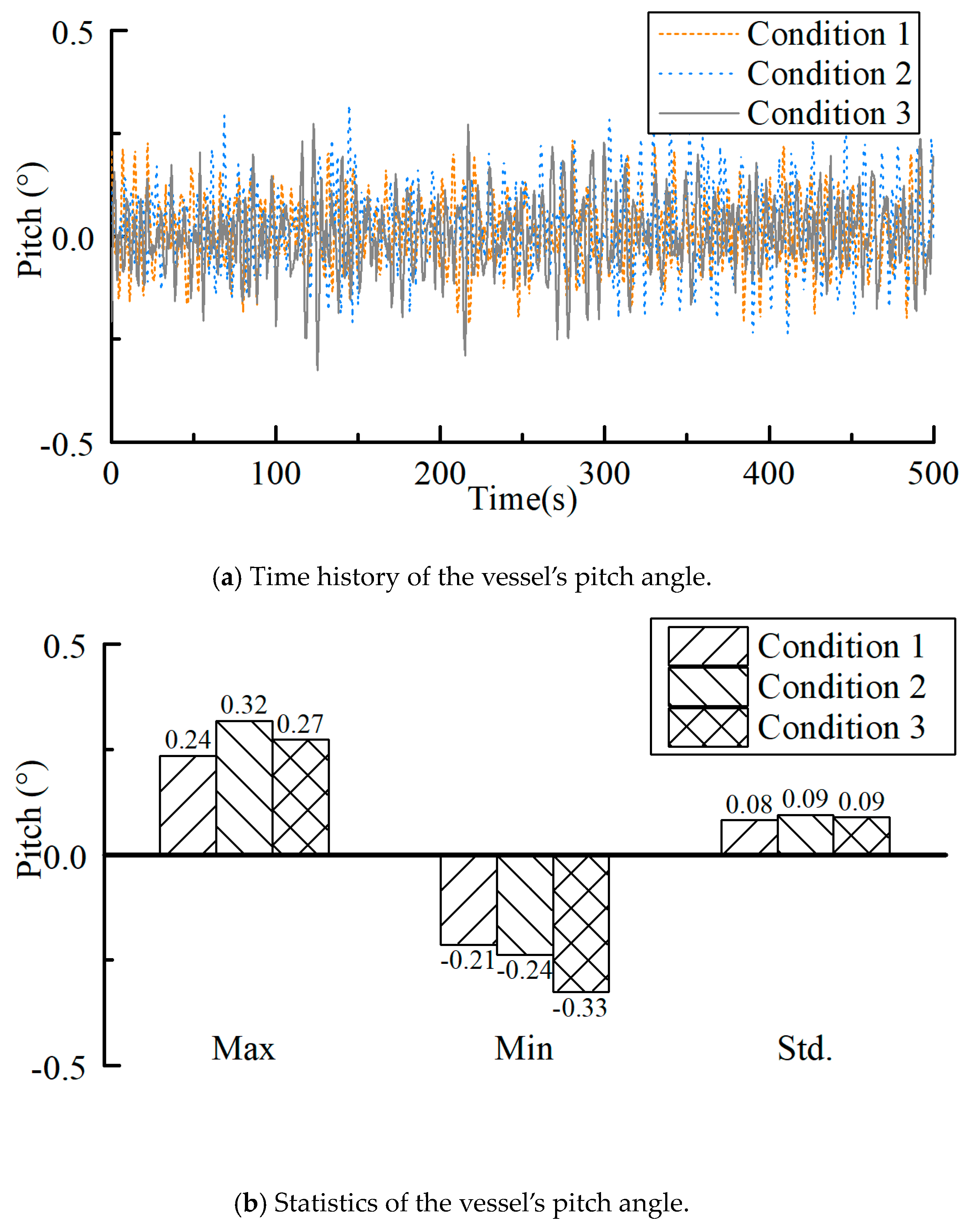
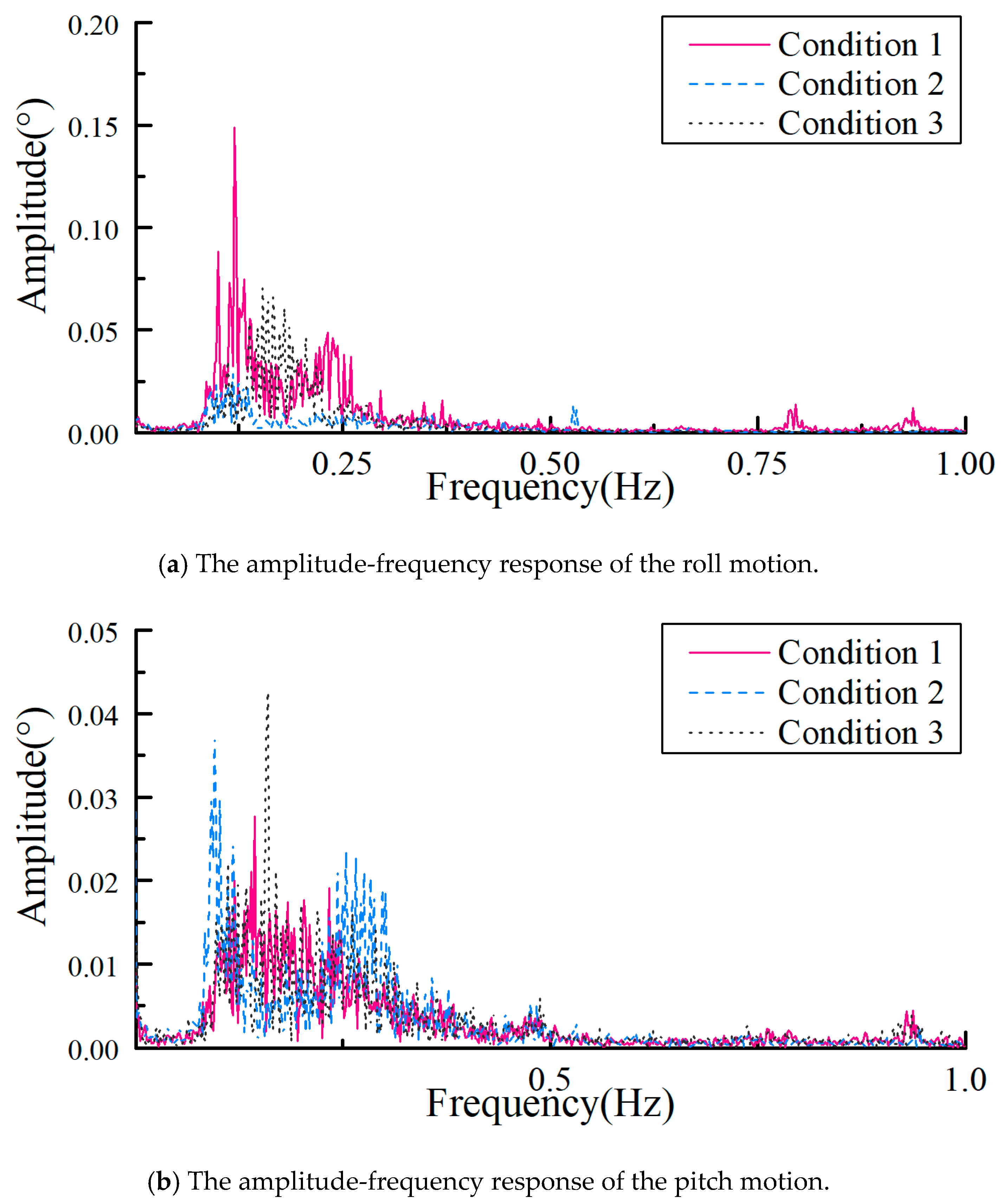
3.2. Roll and Pitch Angles during Towing
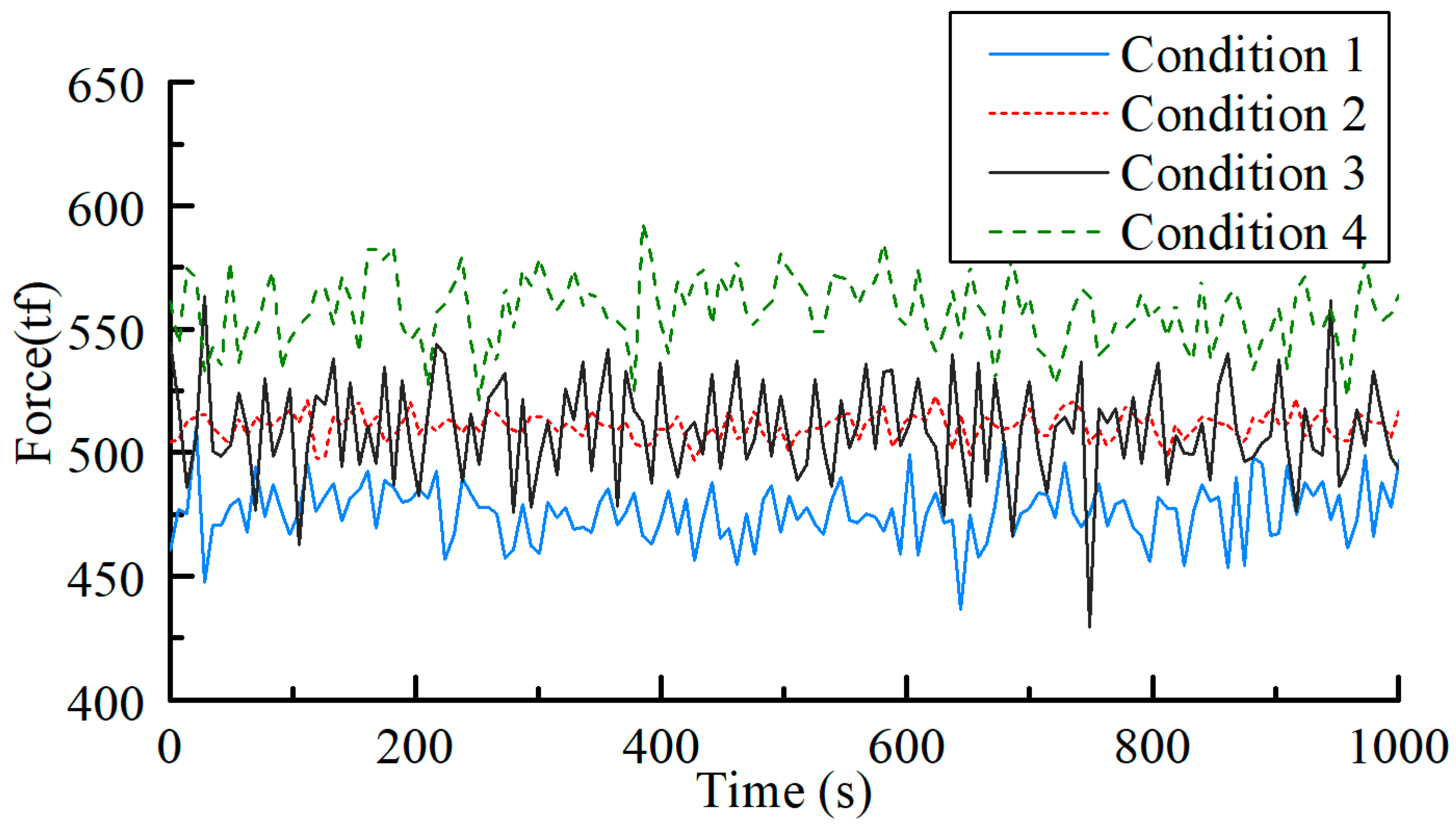
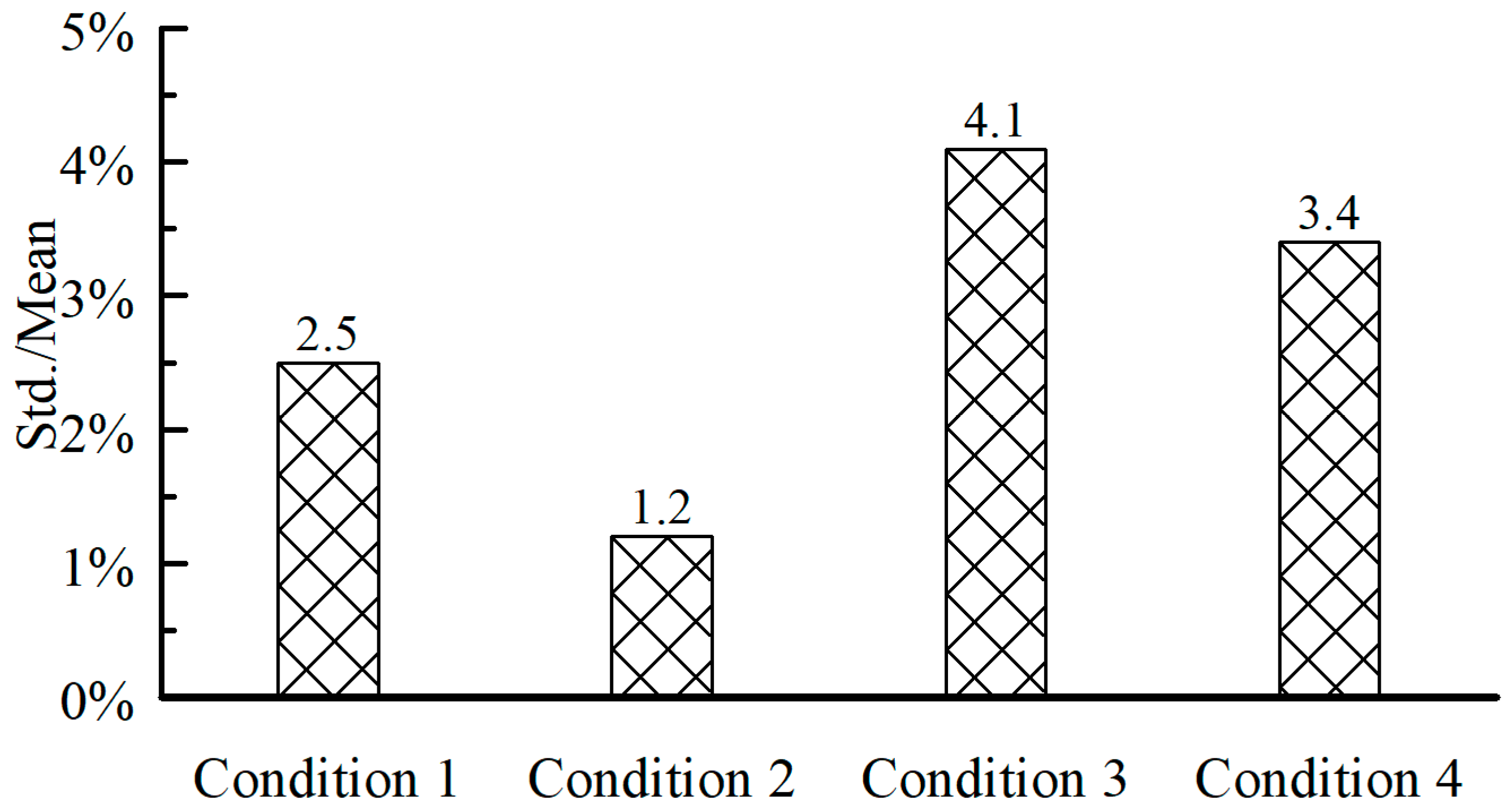
3.3. The Interaction Forces during Transport
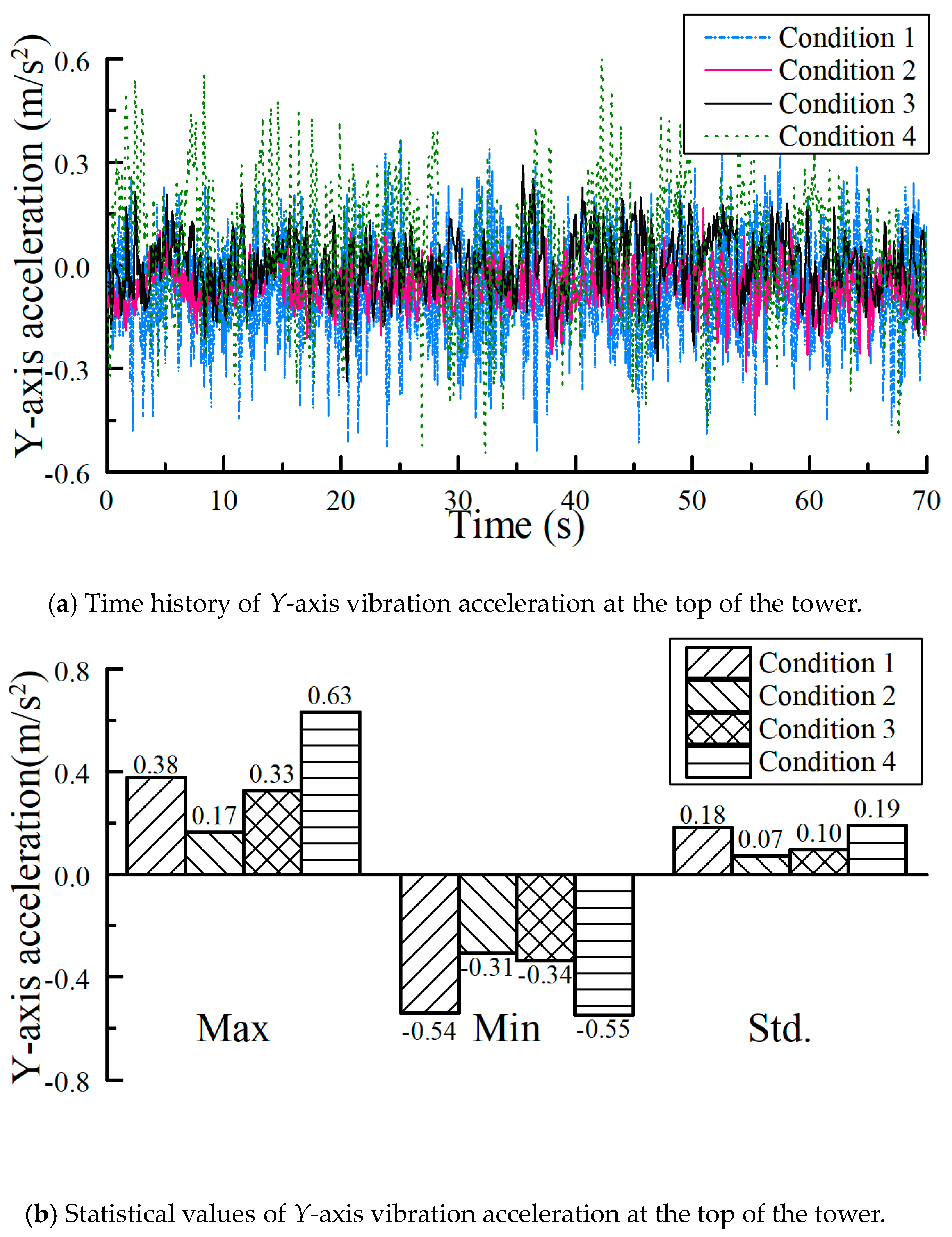
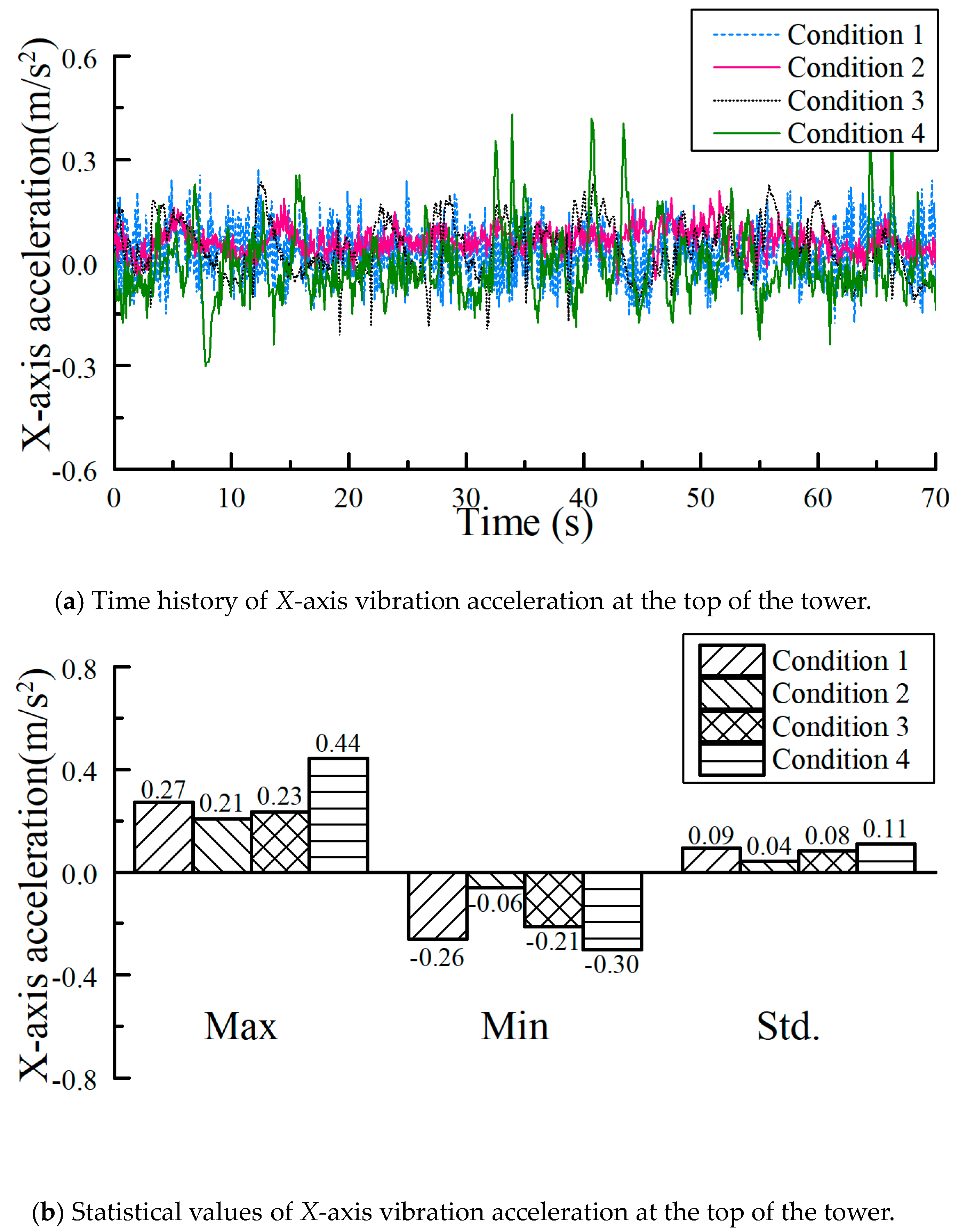
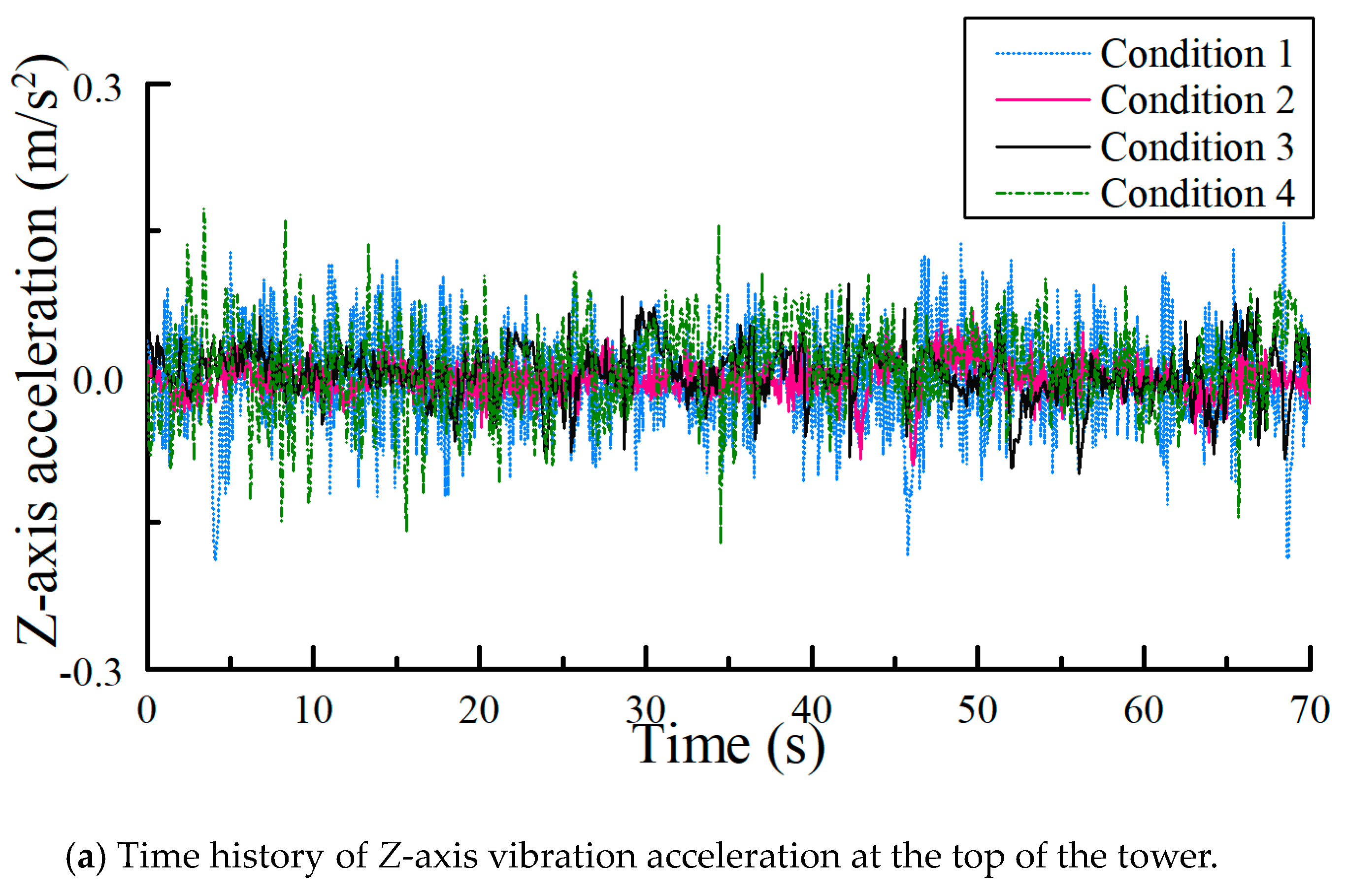
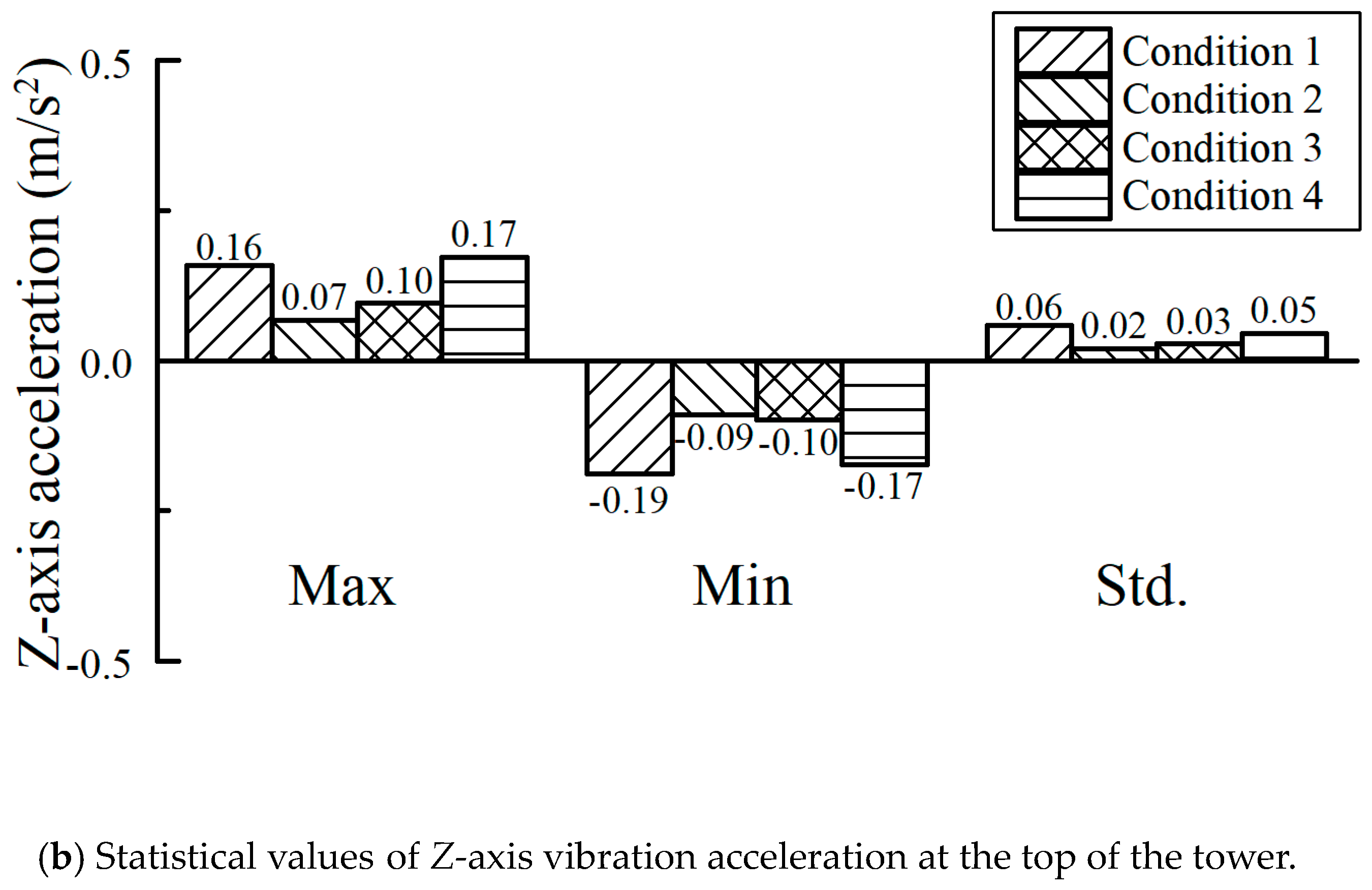
3.4. The Vibration of the Tower during Transport
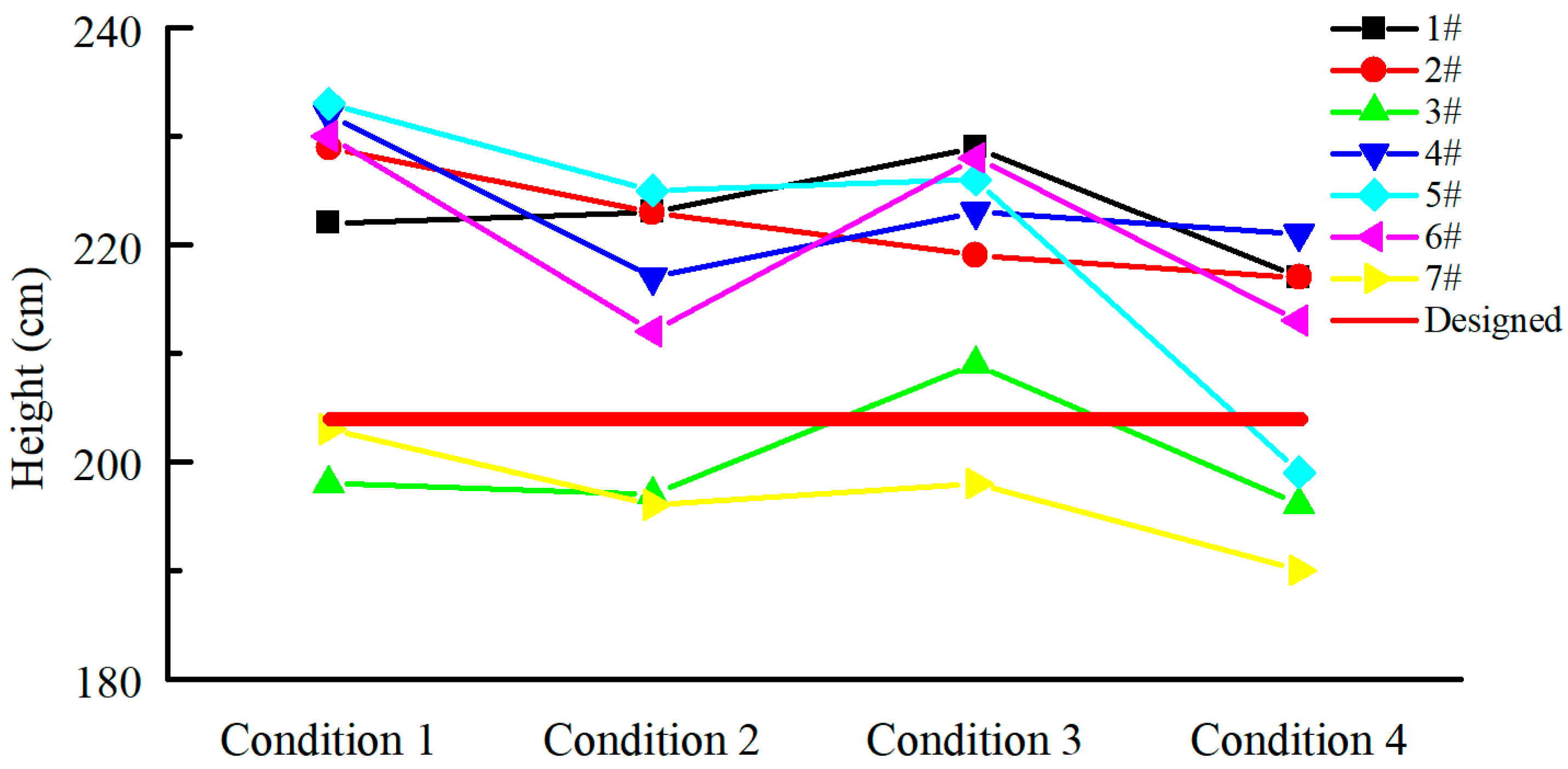
3.5. The liquid Level in the Bucket during Towing
4. Conclusions
- (1)
- During the process of lifting the wind tower, the three-way acceleration of the installation ship was always less than 0.01 m/s2, and the roll and pitch angles were less than 0.02°, which means the whole structures have good stability and stay in an adequately stable position during hoisting.
- (2)
- During the transportation process, the maximum roll and pitch angles of the vessel and CBF were less than 1° and were less than 0.5° in most cases. These small roll and pitch values indicate that the vessel and the CBF have good movement stability and can ensure the safety of the CBF during the transportation process.
- (3)
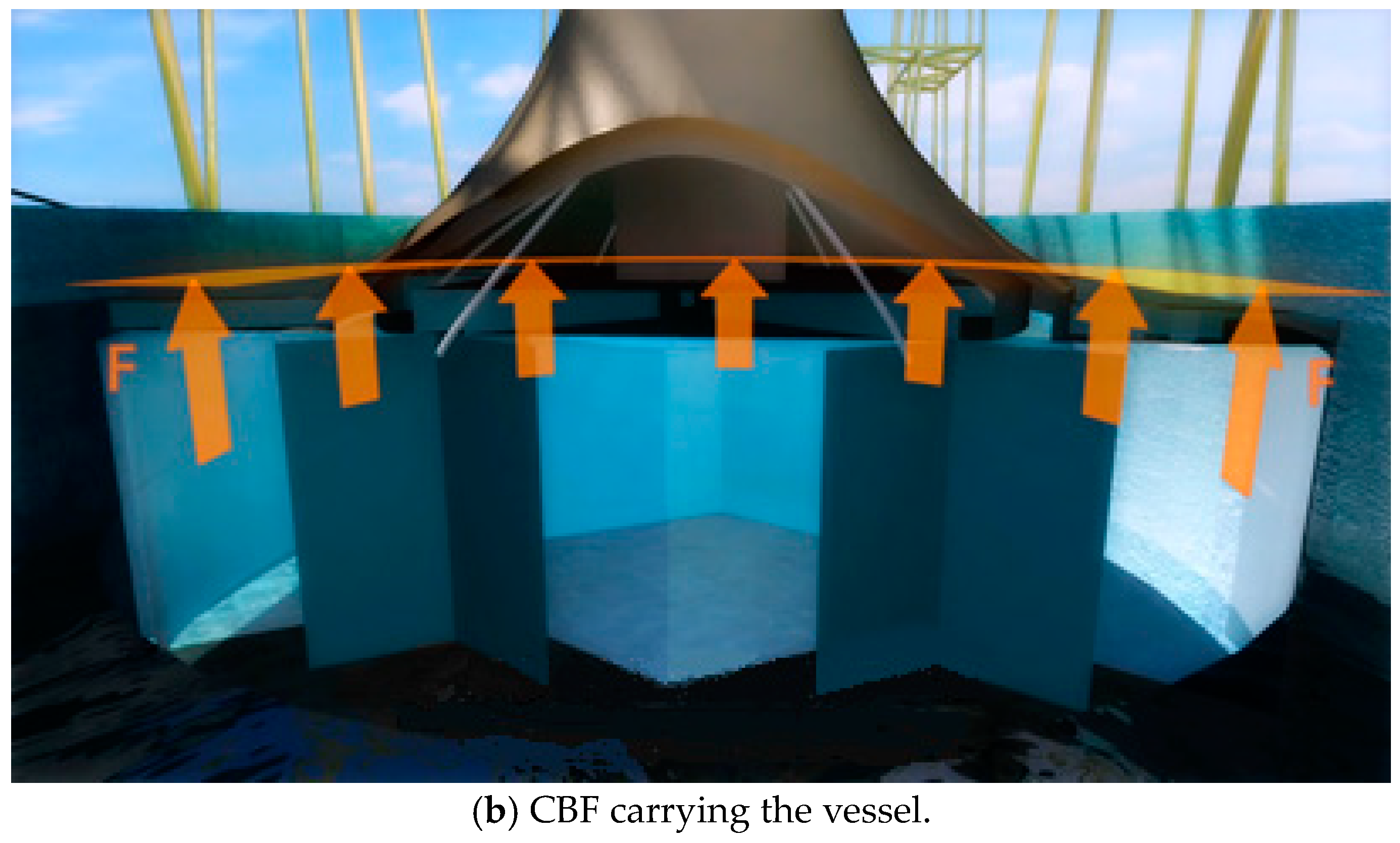
- The safety of the aircushion structure of the CBF was verified by an analysis of the measured results for the interaction forces and the height of the liquid level in the bucket.
- (4)
- The results of the three-way acceleration monitoring on top of the test tower indicate that the wind turbines meet the requirements for the maximum acceleration value limits during transport.
Author Contributions
Funding
Conflicts of Interest
References
- Global Wind Energy Council (GWEC). Global Wind Report; GWEC: Brussels, Belgium, 2018. [Google Scholar]
- Zhang, P.; Ding, H.; Le, C.; Huang, X. Motion analysis on integrated transportation technique for offshore wind turbines. J. Renew. Sustain. Energy 2013, 5, 53117. [Google Scholar] [CrossRef]
- Fu, D.; Gaudin, C.; Tian, C.; Bienen, B.; Cassidy, M. Effects of preloading with consolidation on undrained bearing capacity of skirted circular footings. Géotechnique 2015, 65, 231–246. [Google Scholar] [CrossRef]
- Shi, W.; Park, H.; Chung, C.; Baek, J.; Kim, Y.; Kim, C. Load analysis and comparison of different jacket foundations. Renew. Energy 2013, 54, 201–210. [Google Scholar] [CrossRef]
- Uraz, E. Offshore Wind Turbine Transportation & Installation Analyses. Planning Optimal Marine Operations for Offshore Wind Projects, Praca Magisterska; Gotland University: Visby, Sweden, 2011. [Google Scholar]
- Wang, X.; Zeng, X.; Li, X.; Li, J. Investigation on offshore wind turbine with an innovative hybrid monopile foundation: An experimental based study. Renew. Energy 2019, 132, 129–141. [Google Scholar] [CrossRef]
- Fu, D.; Zhang, Y.; Yan, Y.; Jostad, H.P. Effects of tension gap on the holding capacity of suction anchors. Mar. Struct. 2020, 69, 102679. [Google Scholar] [CrossRef]
- Zhang, P.; Ding, H.; Le, C. Model tests on tilt adjustment techniques for a mooring dolphin platform with three suction caisson foundations in clay. Ocean Eng. 2013, 73, 96–105. [Google Scholar] [CrossRef]
- Wang, X.; Zeng, X.; Li, J. Vertical performance of suction bucket foundation for offshore wind turbines in sand. Ocean Eng. 2019, 180, 40–48. [Google Scholar] [CrossRef]
- Ding, H.; Zhao, X.; Le, C.; Zhang, P.; Min, Q. Towing Motion Characteristics of Composite Bucket Foundation for Offshore Wind Turbines. Energies 2019, 12, 3767. [Google Scholar] [CrossRef]
- Ding, H.; Liu, Y.; Zhang, P.; Le, C. Model tests on the bearing capacity of wide-shallow composite bucket foundations for offshore wind turbines in clay. Ocean Eng. 2015, 103, 114–122. [Google Scholar] [CrossRef]
- Ding, H.; Liu, Y.; Zhang, P. Negative pressure consolidation of silt inside bucket foundation. Trans. Tianjin Univ. 2015, 21, 333–340. [Google Scholar] [CrossRef]
- Zhang, P.; Liang, D.; Ding, H.; Le, C.; Zhao, X. Floating State of a One-Step Integrated Transportation Vessel with Two Composite Bucket Foundations and Offshore Wind Turbines. J. Mar. Sci. Eng. 2019, 7, 263. [Google Scholar] [CrossRef]
- Zhang, P.; Hu, R.; Ding, H.; Guo, Y.; Xiong, K. Comparative analysis of seepage field characteristics in bucket foundation with and without compartments. Ocean Eng. 2017, 143, 34–49. [Google Scholar] [CrossRef]
- Zhang, P.; Ding, H.; Le, C. Seismic response of large-scale prestressed concrete bucket foundation for offshore wind turbines. J. Renew. Sustain. Energy 2014, 6, 13127. [Google Scholar] [CrossRef]
- Ding, H.; Lian, J.; Li, A.; Zhang, P. The Invention Relates to Floating Transportation Method of Offshore Wind Turbine. CN 1,029,269,49A, 13 February 2013. [Google Scholar]
- He, S.; Zhang, P.; Ding, H. Study on the Bearing Mode and Force Transfer Path of Composite Bucket Foundations. Energies 2017, 10, 1041. [Google Scholar] [CrossRef]
- Ding, H.; Zhang, P.; Lian, J. The Invention Relates to a Bucket Foundation Sinking Method for Water Displacement of Air. CN 1,017,367,48A, 16 June 2010. [Google Scholar]
- Zhang, P.; Guo, Y.; Liu, Y.; Ding, H. Experimental study on installation of hybrid bucket foundations for offshore wind turbines in silty clay. Ocean Eng. 2016, 114, 87–100. [Google Scholar] [CrossRef]
- Ding, H.; Lian, J.; Li, A.; Zhang, P. One-step-installation of offshore wind turbine on large-scale bucket-top-bearing bucket foundation. Trans. Tianjin Univ. 2013, 19, 188–194. [Google Scholar] [CrossRef]
- Zhang, P.; Han, Y.; Ding, H.; Zhang, S. Field experiments on wet tows of an integrated transportation and installation vessel with two bucket foundations for offshore wind turbines. Ocean Eng. 2015, 108, 769–777. [Google Scholar] [CrossRef]
- Pinkster, J.A.; Fauzi, A. Motions and drift forces of air-supported structures in waves. In Proceedings of the 5th WEGEMT Workshop Non-Linear Wave Action on Structures and Ships, Toulon-Var, France, 4–8 July 1998. [Google Scholar]
- Pinkster, J.A. The behavior of large air cushion supported structures in waves. Proceeding on Hydroelasticity in Marine Technology. Hydroelasticity 1998, 98, 497–506. [Google Scholar]
- Tabeta, S.; Pinkster, J.A. Model Experiments on Barge Type Floating Structures Supported by Air Cushions; TUDelft, Faculty of Marine Technology, Ship Hydromechanics Laboratory Report 1125; The University of Yokohama: Yokohama, Japan, 1998. [Google Scholar]
- Malenica, S.; Zalar, M. An alternative method for linear hydrodynamics of air cushion supported floating bodies. In Proceedings of the 15th International Workshop on Water Waves and Floating Bodies, Caesarea, Israel, 17 February–1 March 2000; pp. 1–4. [Google Scholar]
- Thiagarajan, K.P. An effective scaling device for model testing of air cushion vehicles in a Laboratory. In Proceedings of the 25th Symposium on Naval Hydrodynamics, St. John’s, NL, Canada, 8–13 August 2004. [Google Scholar]
- Thiagarajan, K.P.; Morris-Thomas, M.T.; Spargo, A. Heave and pitch response of an offshore platform with air cushion support in shallow water. In Proceedings of the ASME 2004 23rd International Conference on Offshore Mechanics and Arctic Engineering, Vancouver, BC, Canada, 20–25 June 2004; pp. 817–823. [Google Scholar]
- Chenu, B.; Morris-Thomas, M.T.; Thiagarajan, K.P. Some hydrodynamic characteristics of an air-cushion supported concrete gravity structure. In Proceedings of the 15th Australasian Fluid Mechanics Conference, Sydney, Australia, 13–17 December 2004. [Google Scholar]
- Ikoma, T.; Masuda, K.; Maeda, H.; Rheem, C.K. Hydroelastic behavior of air-supported flexible floating structures. In Proceedings of the ASME 2002 21st International Conference on Offshore Mechanics and Arctic Engineering, Oslo, Norway, 23–28 June 2002; pp. 745–752. [Google Scholar]
- Ikoma, T.; Masuda, K.; Maeda, H.; Rheem, C.K. A prediction method of hydroelastic motion of aircushion type floating structures considering with draft effect into hydrodynamic forces. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; pp. 421–429. [Google Scholar]
- Ikoma, T.; Masuda, K.; Rheem, C.-K.; Maeda, H. Response Reduction of Motion and Steady Wave Drifting Forces of Floating Bodies Supported by Aircushions in Regular Waves: The 2nd Report—Response Characteristics in Oblique Waves. In Proceedings of the ASME 2007 26st International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; pp. 3–9. [Google Scholar]
- Zhang, P.; Ding, H.; Le, C. Hydrodynamic motion of a large prestressed concrete bucket foundation for offshore wind turbines. J. Renew. Sustain. Energy 2013, 5, 63126. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, P.; Zhao, M.; Ding, H.; Le, C. Influencing Factors of Motion Responses for Large-Diameter Tripod Bucket Foundation. Appl. Sci. 2019, 9, 4957. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, P.; Zhao, M.; Ding, H.; Le, C. Air-Floating Characteristics of Large-Diameter Multi-Bucket Foundation for Offshore Wind Turbines. Energies 2019, 12, 4108. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Values | Property | Values |
|---|---|---|---|
| Molded Length (m) | 103 | Bucket diameter (m) | 30 |
| Molded Breadth (m) | 51 | Bucket height (m) | 12 |
| Molded Depth (m) | 9 | Transition height (m) | 20 |
| Design Draught (m) | 6 | Tower height (m) | 78.5 |
| Tonnage (t) | −16,900 | Tower mass (t) | 207.0 |
| Upper groove diameter (m) | 25 | Total mass (t) | −2700.0 |
| Lower groove diameter (m) | 37 | Natural period of roll (s) | 8.5 |
| Height of truss (m) | 62 | Natural period of pitch (s) | 11.0 |
| Natural period of heave (s) | 6.7 |
| Condition | Speed (knot) | Wind Speed (Beaufort Scale) | Average Wave Height (m) | Wave Heading |
|---|---|---|---|---|
| Condition 1 | 4.9 | 4 | 1.5 | Beam sea |
| Condition 2 | 3.8 | 4 | 1.2 | Head sea |
| Condition 3 | Anchored | 8 | 2.0 | Beam sea |
| Condition 4 | Anchored | 8 | 3.0 | Diagonal |
| Condition | Max (°) | Min (°) | Std. (°) | |||
|---|---|---|---|---|---|---|
| Roll | Pitch | Roll | Pitch | Roll | Pitch | |
| Condition 1 | 0.78 | 0.23 | −0.57 | −0.21 | 0.28 | 0.08 |
| Condition 2 | 0.25 | 0.32 | −0.26 | −0.21 | 0.08 | 0.08 |
| Condition 3 | 0.64 | 0.27 | −0.70 | −0.33 | 0.18 | 0.08 |
| Condition | Max (tf) | Min (tf) | Mean (tf) | Std. (tf) | Std./Mean |
|---|---|---|---|---|---|
| Condition 1 | 510 | 430 | 475 | 12 | 2.5% |
| Condition 2 | 525 | 490 | 509 | 6 | 1.2% |
| Condition 3 | 600 | 430 | 517 | 21 | 4.1% |
| Condition 4 | 600 | 500 | 556 | 19 | 3.4% |
| Condition | Horizontal Acceleration | Horizontal Limiting | Max/ Limiting | Vertical Acceleration | Vertical Limiting | Max/ Limiting |
|---|---|---|---|---|---|---|
| Condition 1 | 0.047 g | 0.25 g | 18.8% | 0.019 g | 0.15 g | 9.5% |
| Condition 2 | 0.025 g | 10.0% | 0.009 g | 4.5% | ||
| Condition 3 | 0.036 g | 14.4% | 0.010 g | 5.0% | ||
| Condition 4 | 0.072 g | 28.8% | 0.017 g | 8.5% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, H.; Feng, Z.; Zhang, P.; Le, C.; Guo, Y. Floating Performance of a Composite Bucket Foundation with an Offshore Wind Tower during Transportation. Energies 2020, 13, 882. https://doi.org/10.3390/en13040882
Ding H, Feng Z, Zhang P, Le C, Guo Y. Floating Performance of a Composite Bucket Foundation with an Offshore Wind Tower during Transportation. Energies. 2020; 13(4):882. https://doi.org/10.3390/en13040882
Chicago/Turabian StyleDing, Hongyan, Zuntao Feng, Puyang Zhang, Conghuan Le, and Yaohua Guo. 2020. "Floating Performance of a Composite Bucket Foundation with an Offshore Wind Tower during Transportation" Energies 13, no. 4: 882. https://doi.org/10.3390/en13040882
APA StyleDing, H., Feng, Z., Zhang, P., Le, C., & Guo, Y. (2020). Floating Performance of a Composite Bucket Foundation with an Offshore Wind Tower during Transportation. Energies, 13(4), 882. https://doi.org/10.3390/en13040882