Adaptive Flight Path Control of Airborne Wind Energy Systems




Abstract
1. Introduction
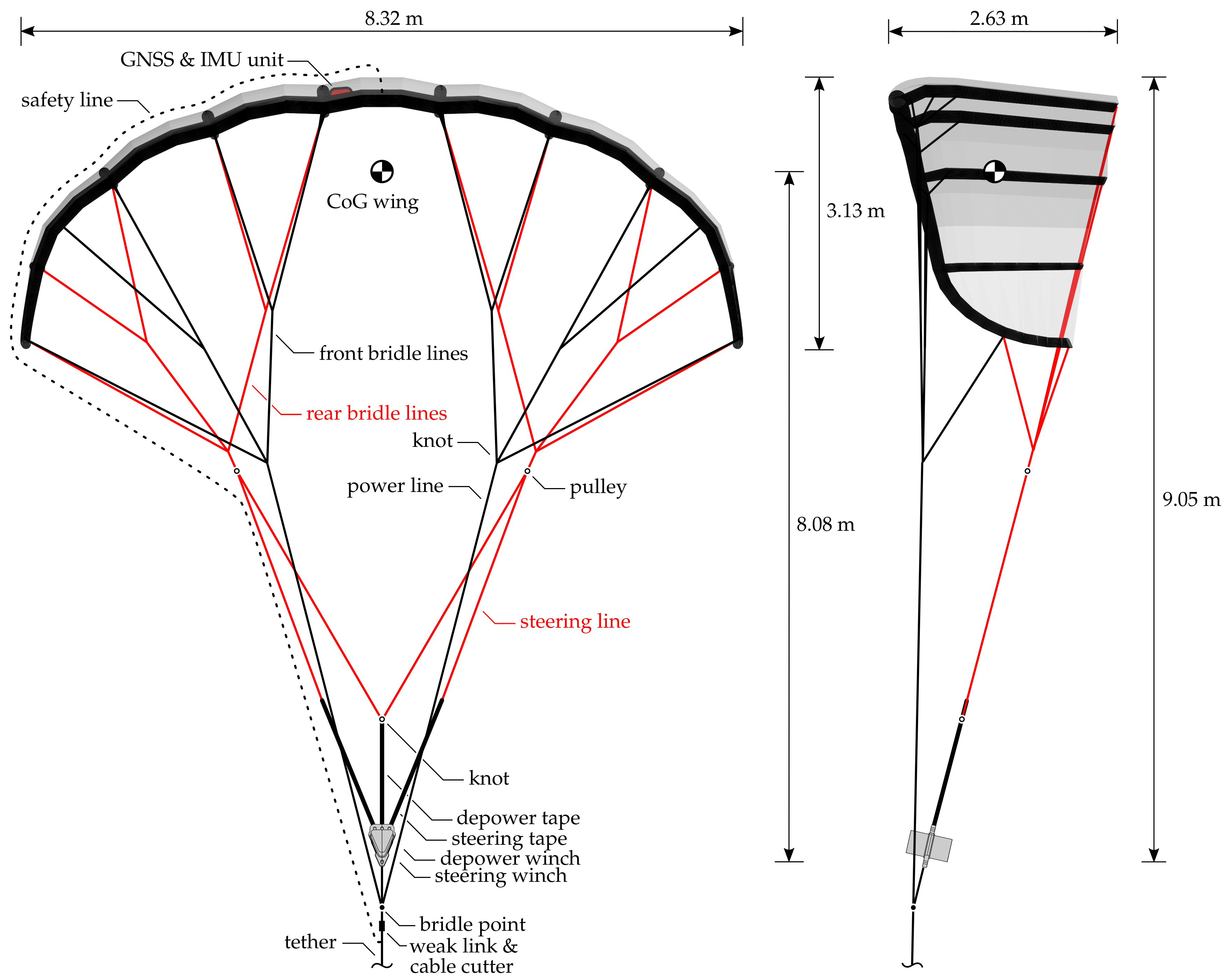
- The kite is based on a flexible membrane wing, and its shape depends on the aerodynamic force distribution during flight, the structural design, and the line suspension system;
- the relative flow velocity experienced by wing and tether varies along the flight path, and there is yet no accurate way to assess this in real time; and
- We propose an algorithm that estimates the parameters of the kite’s dynamic model in real time using system identification (SI) [27,28,29,30]. The employed SI algorithm is a noniterative technique based on Plackett’s algorithm due to its ability to calculate the parameters of the system (dynamic model) with high accuracy without singularity.
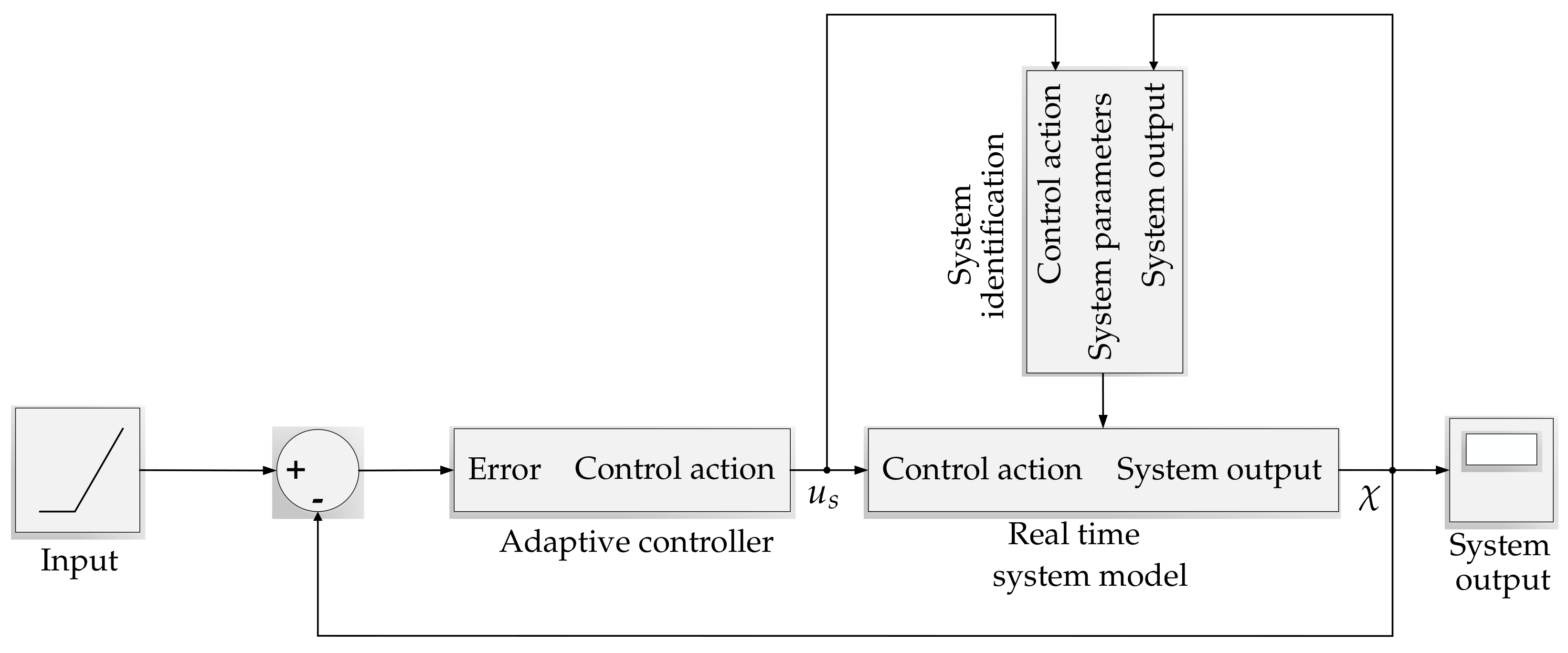
- We further propose an adaptive controller to improve the robustness of the system and stabilize the kite in different wind conditions. Moreover, SI is considered as a part of the adaptive control strategy, and the estimated parameters are used to obtain the control gains [30], which means that these gains are updated in real time on the basis of changes in the dynamic model [28].
- We present a comparison between adaptive and classical controllers to highlight the robustness of the controller and the ability of adaptive control to stabilize the kite for different wind conditions without any change in the SI and adaptive control algorithms.
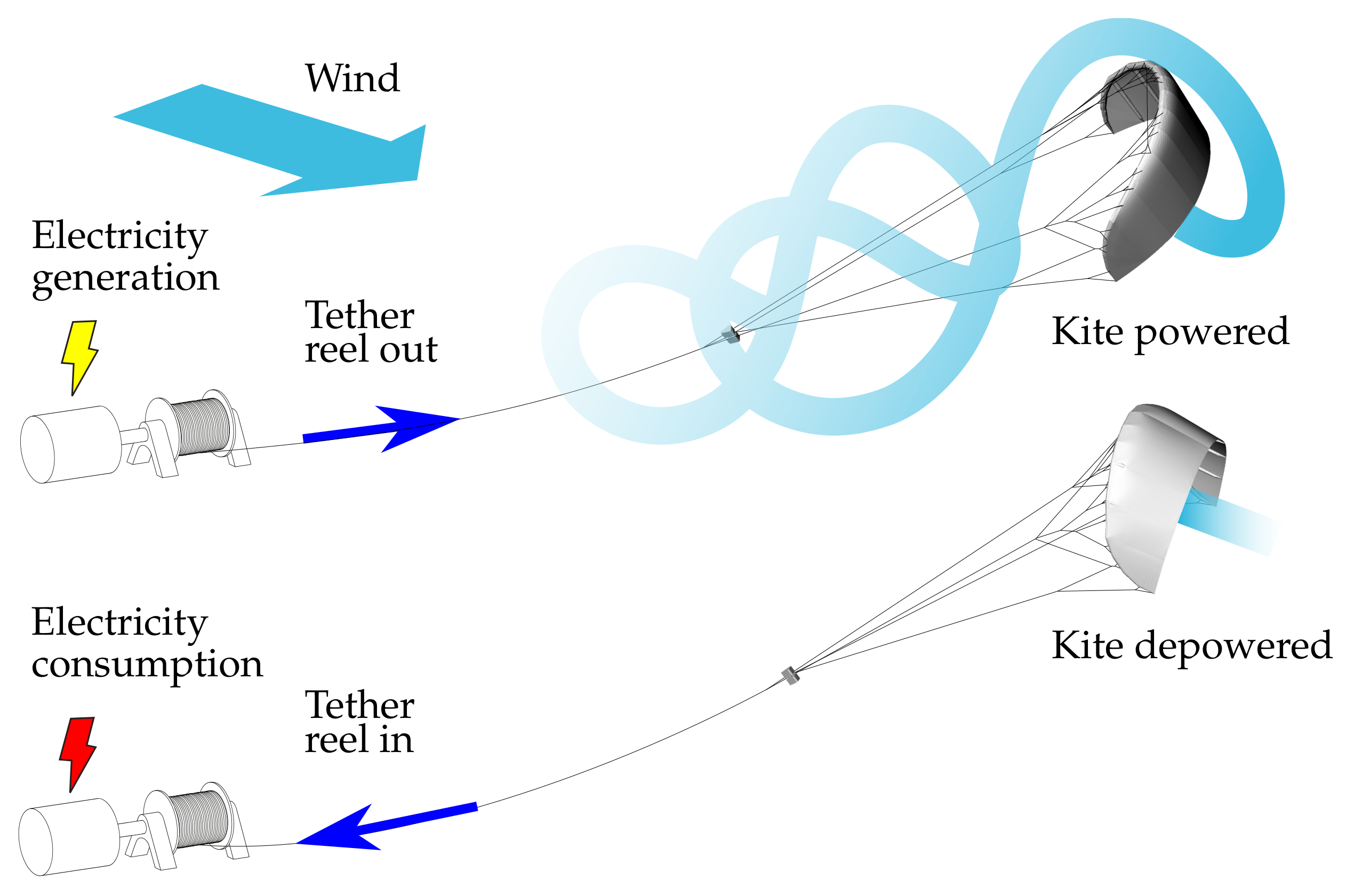
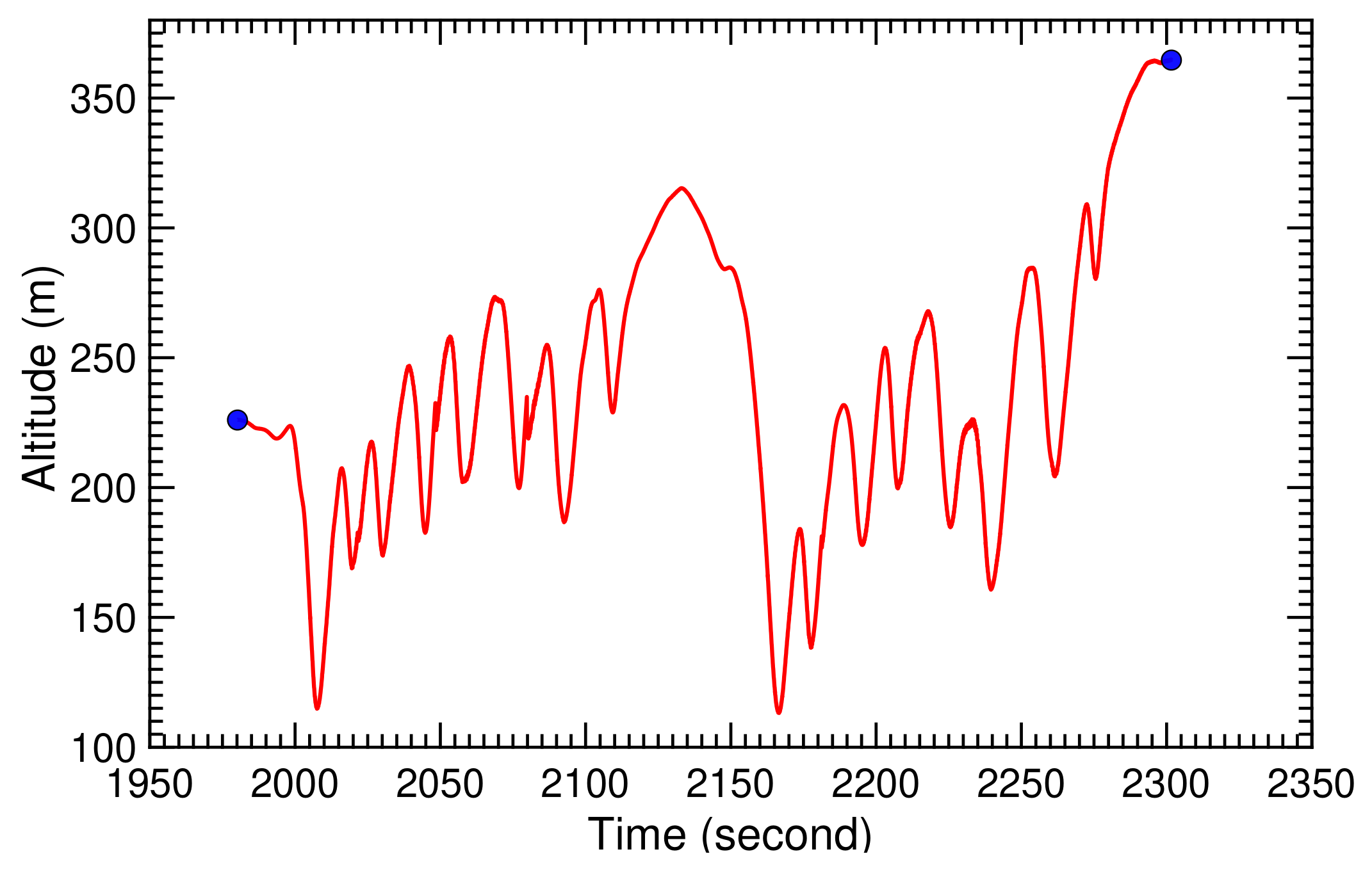
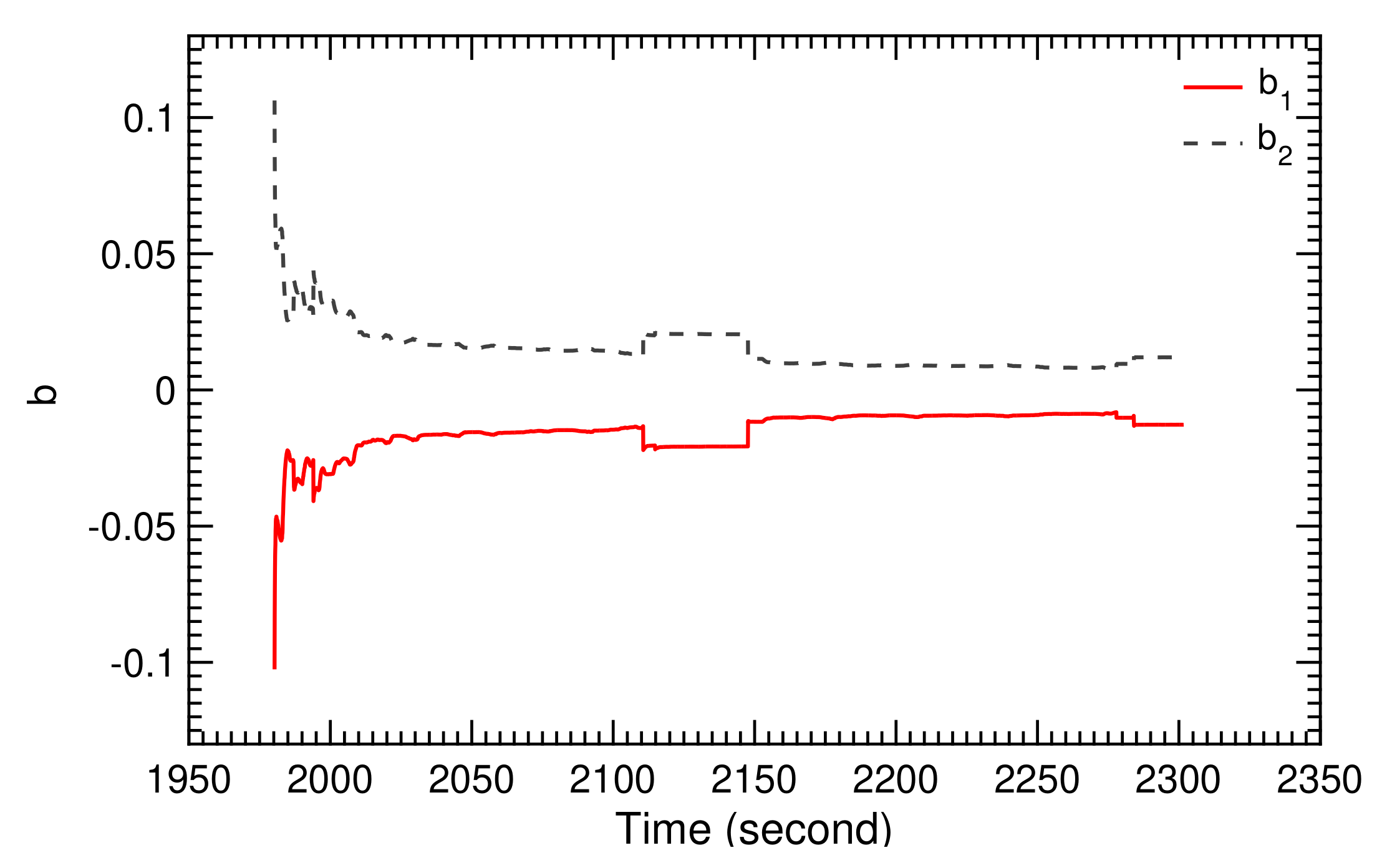
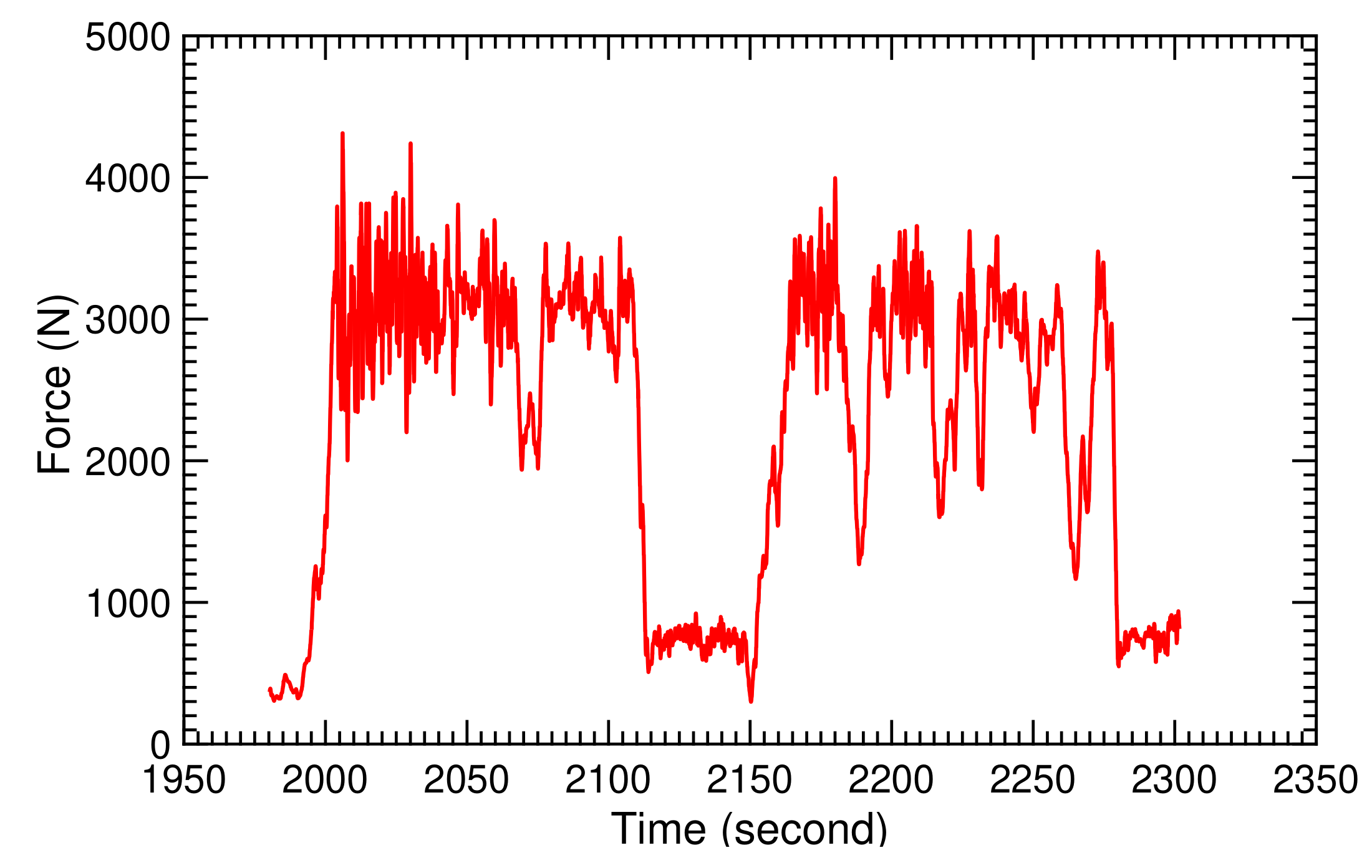
- We applied the SI algorithm to experimental data of the 20 kW kite power system of Delft University of Technology [5]. The algorithm was used to estimate the parameters of the system in different operating phases, such as tether reel out and reel in, for two consecutive pumping cycles while experiencing changes in wind speed and tether length.
2. Mathematical Model
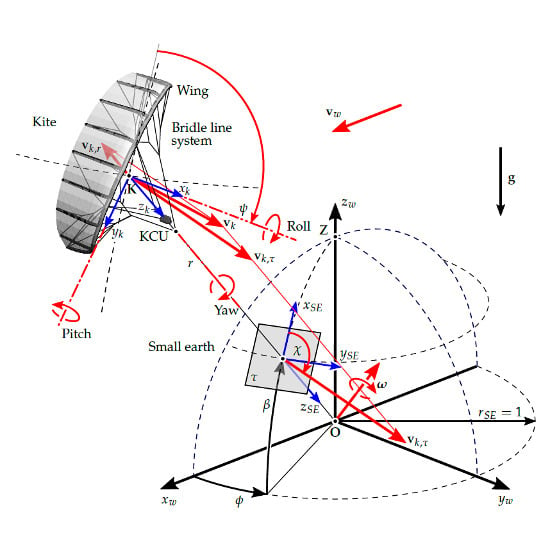
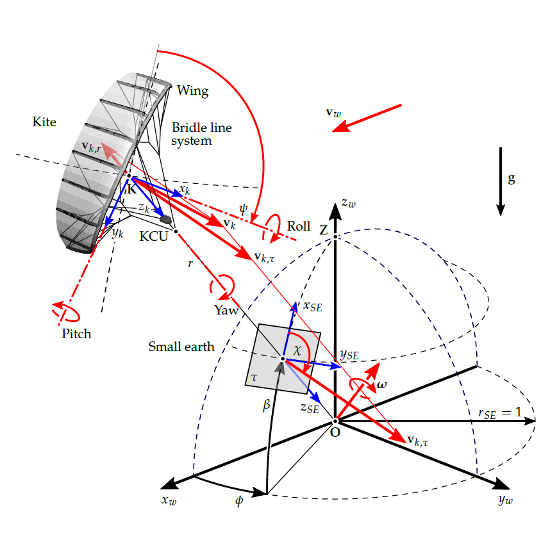
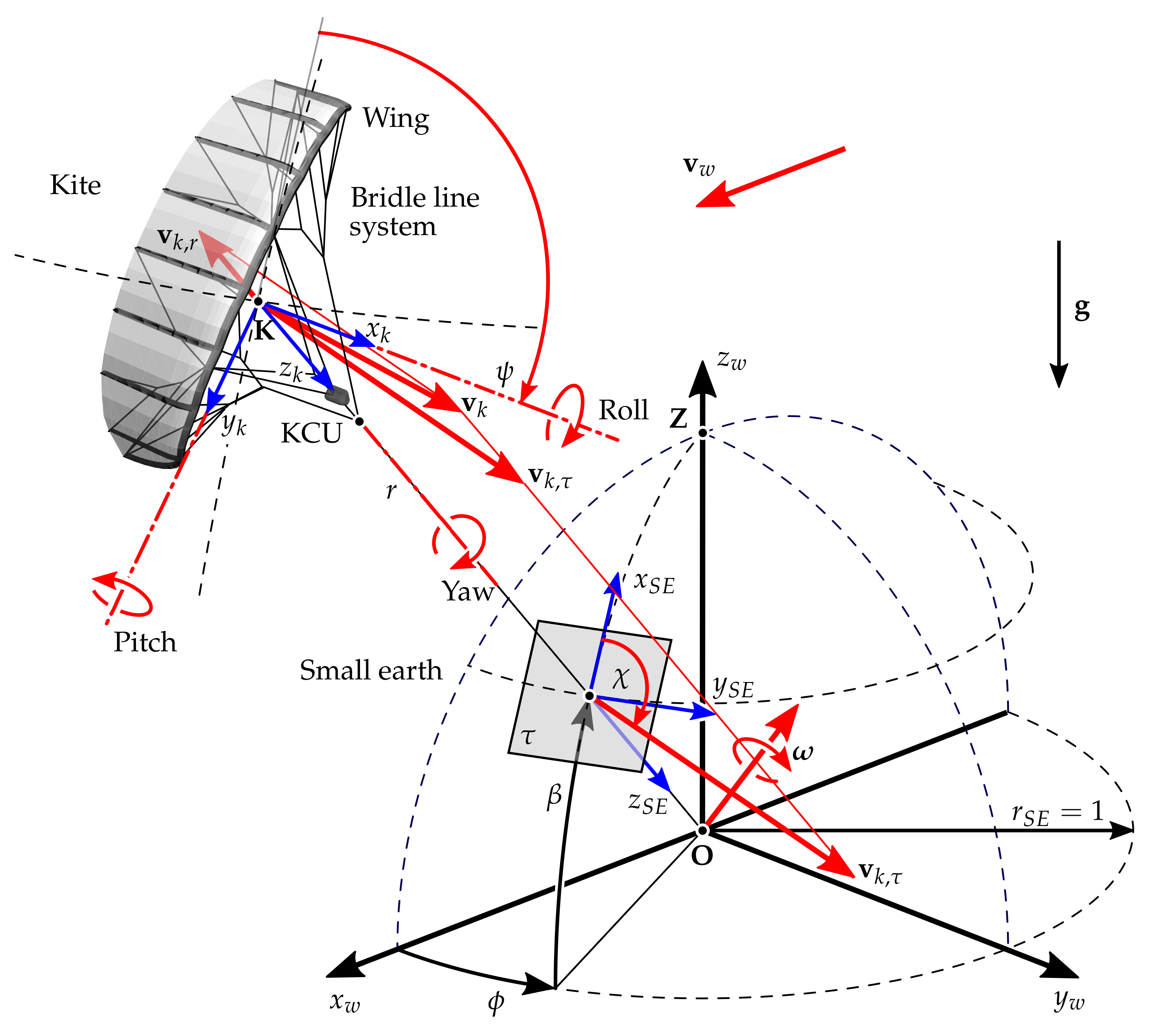
2.1. Simplified Kite System Model
- The tether is straight, and the tether length is identical to the radial position r of the kite .
- The wing is attached to the tether with a bridle line system that constrains the roll and pitch of the wing. Only the heading angle remains as a degree of freedom to control the course of the kite.
- The difference between heading and course angles can be neglected. Both angles and their time derivatives are assumed to be identical in this study.
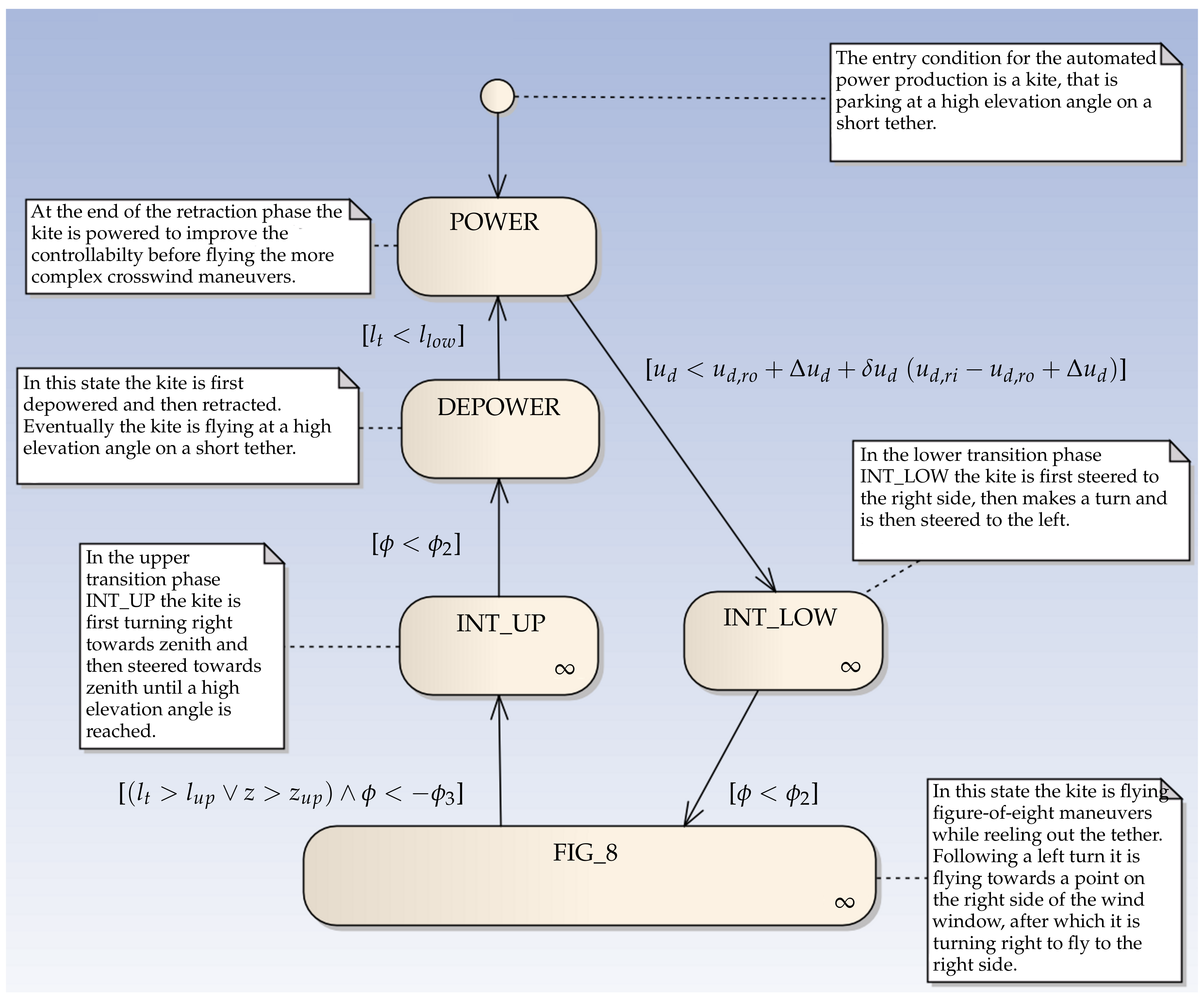
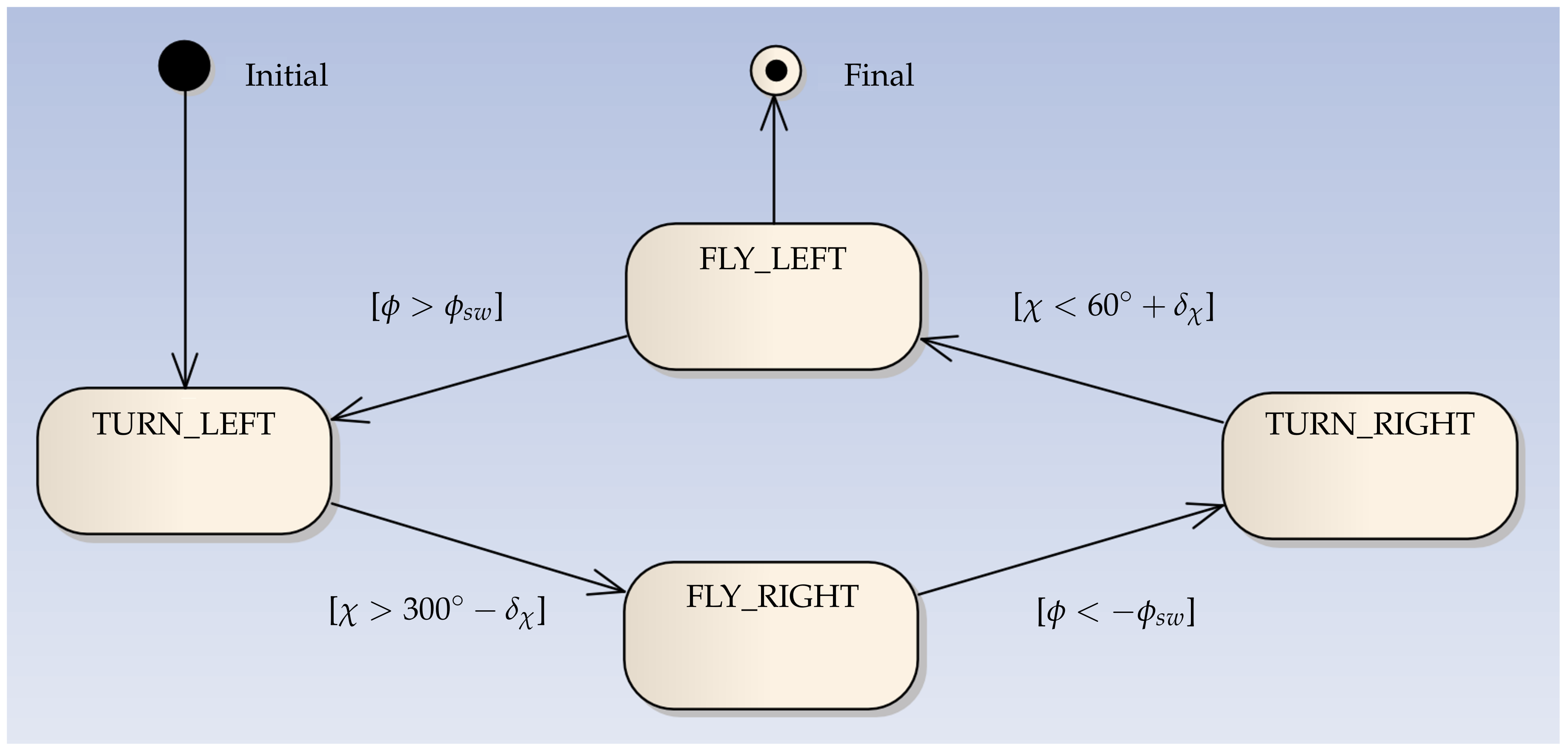
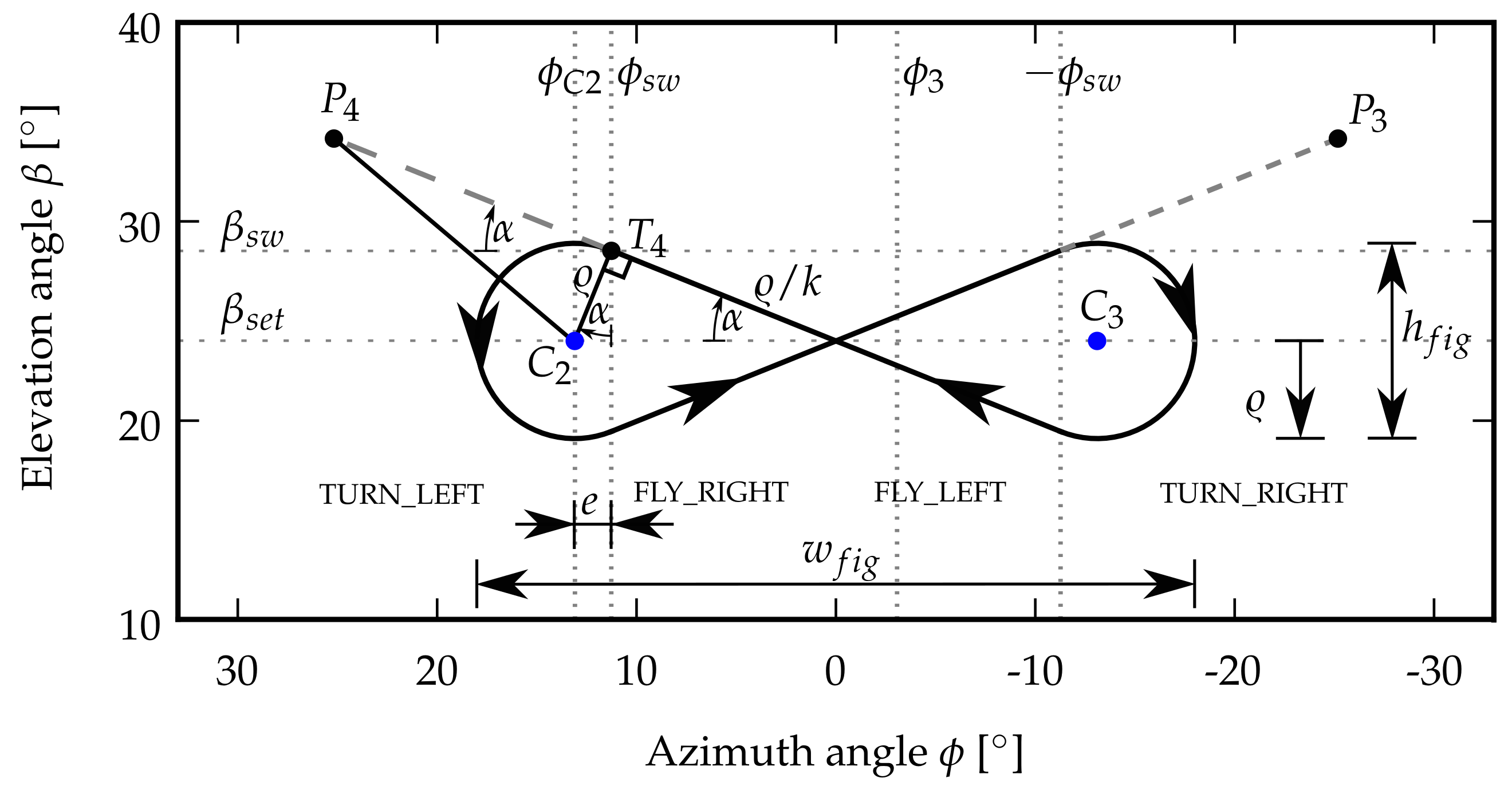
2.2. Flight Path Planner (FPP)
2.3. Flight Path Control (FPC)
3. System Identification (SI) Using Plackett’s Algorithm
4. Robust Pole-Placement Controller
5. Simulation Results
5.1. Flight Condition I
5.2. Flight Condition II
6. Experimental Results
6.1. System Configuration
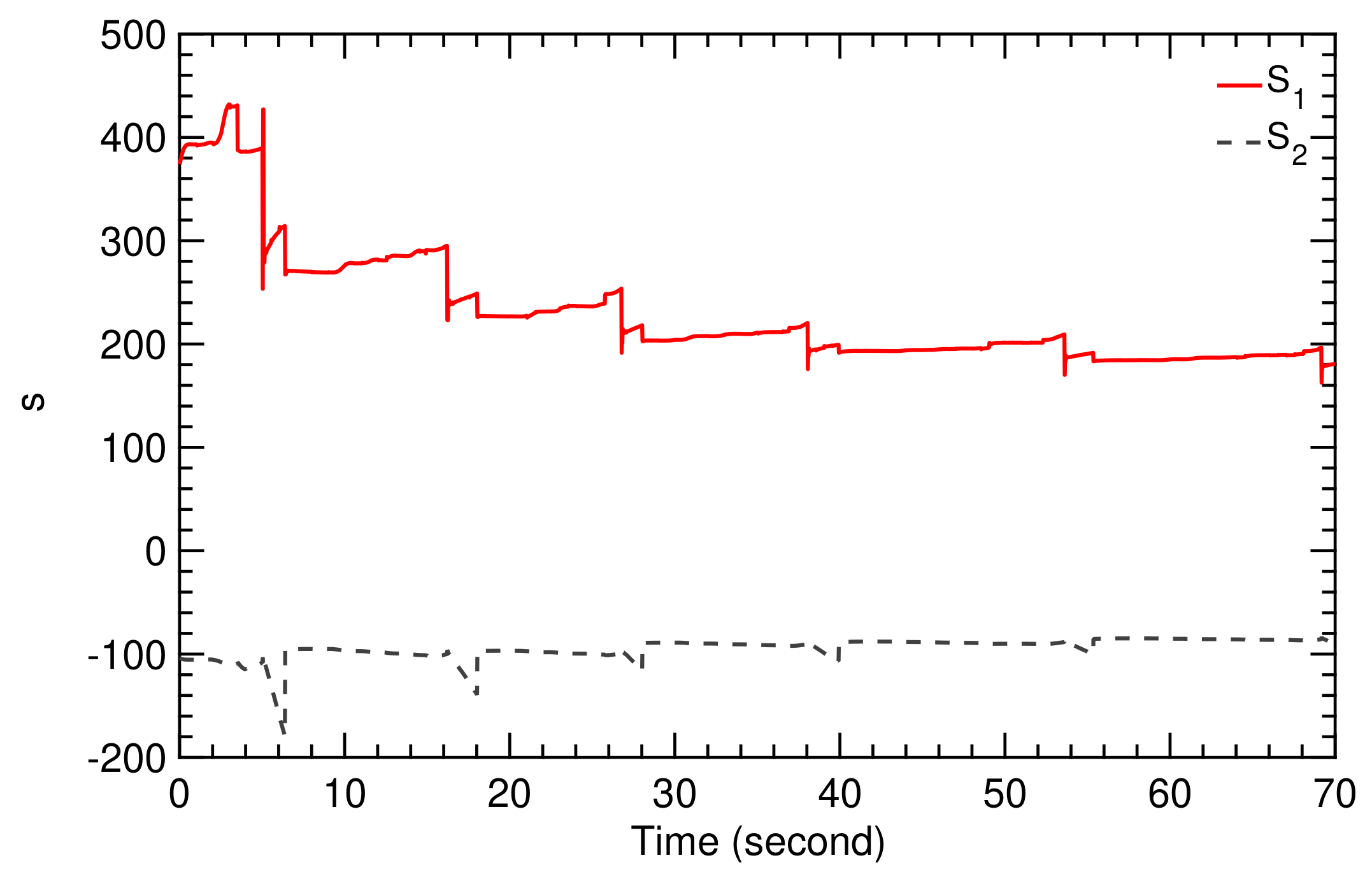
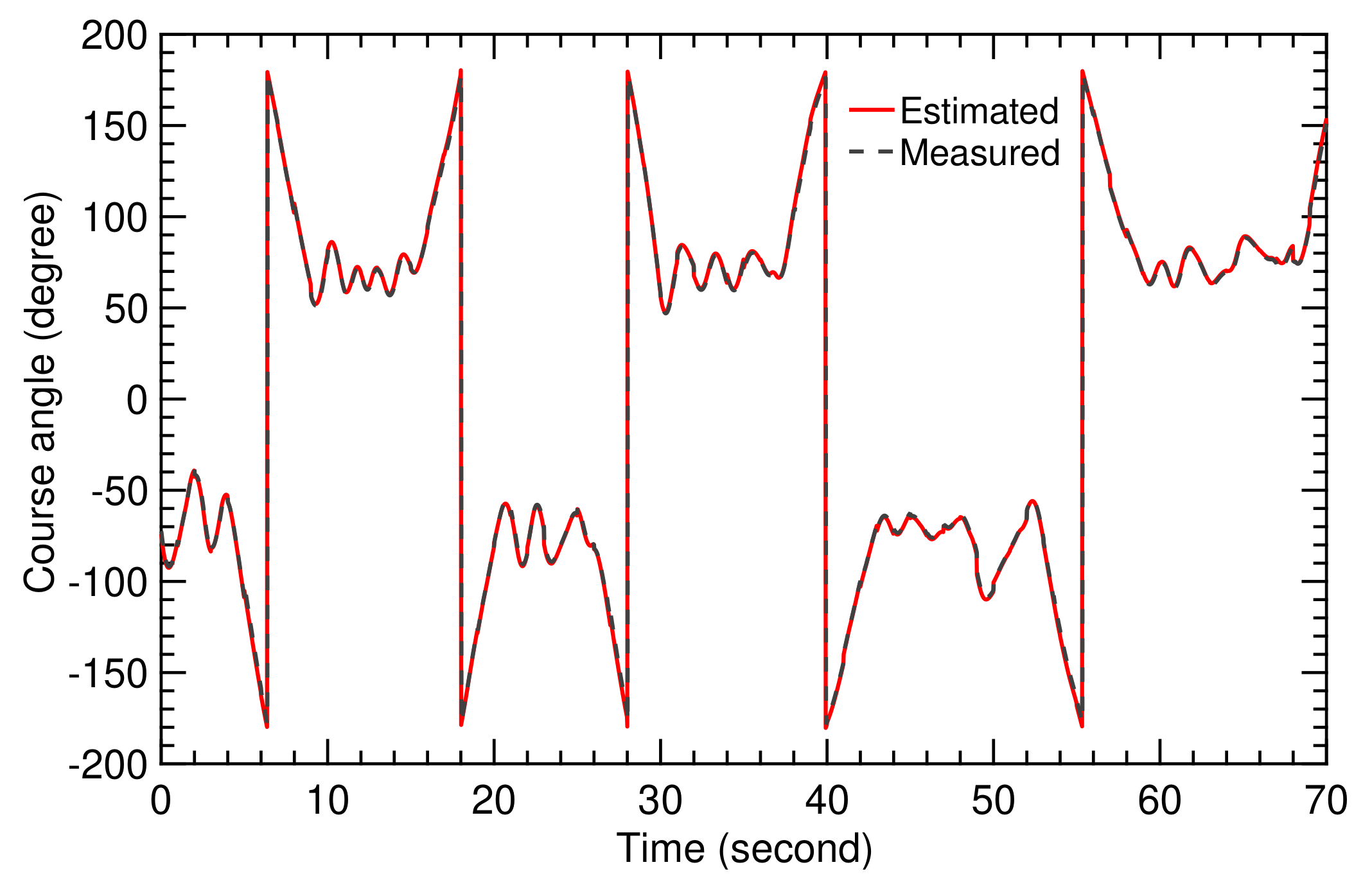
6.2. System Identification
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Latin Symbol | ||
| A | denominator polynomial of open-loop TF | - |
| , , , | coefficients of the open-loop TF | - |
| B | numerator polynomial of open-loop TF | - |
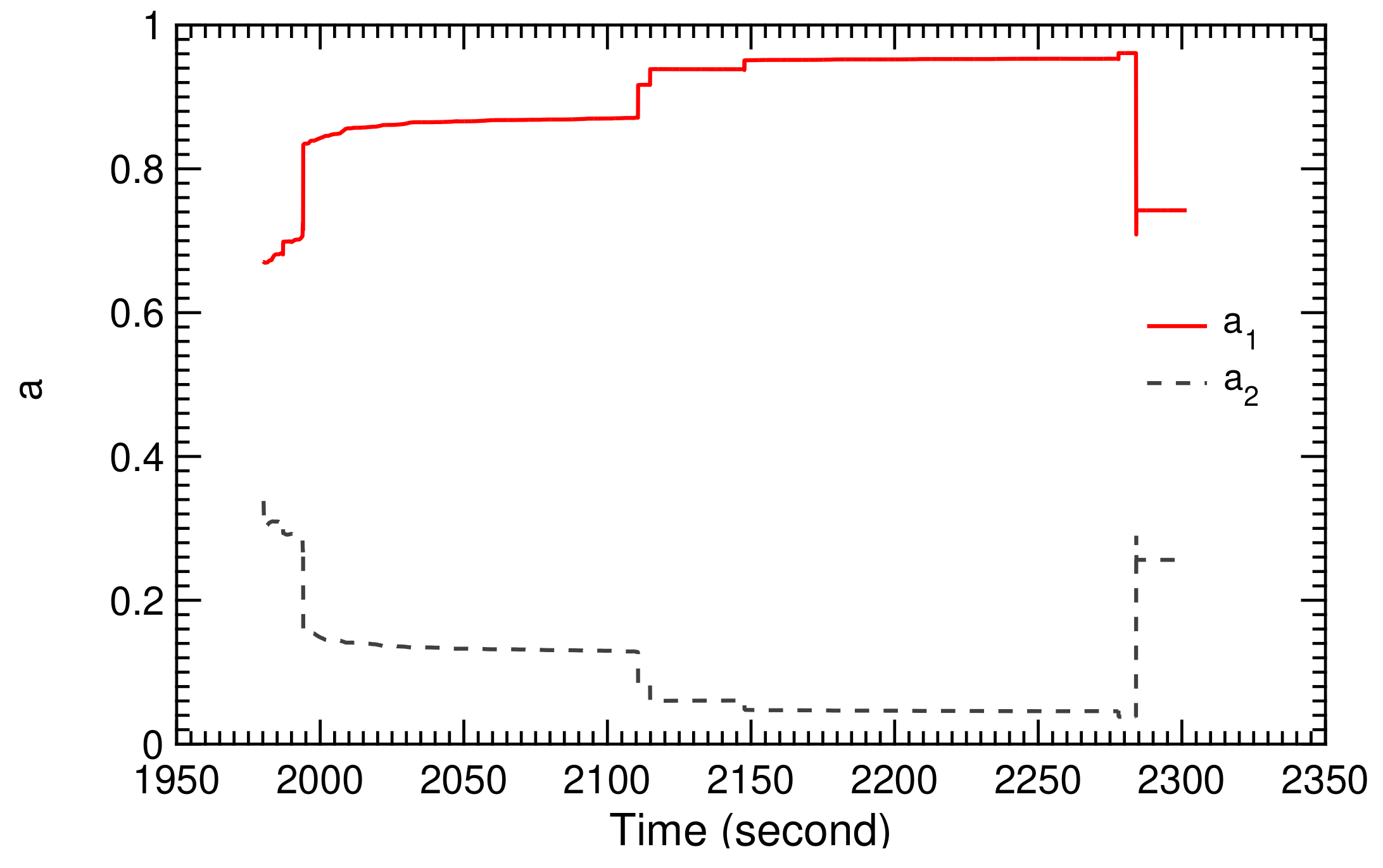
| , , | adaptive control parameters | - |
| gravity-sensitivity coefficient of turn rate law | rad.m/s | |
| steering-sensitivity coefficient of turn rate law | rad/m | |
| steering offset of turn rate law | - | |
| open-loop TF of model in z-domain | - | |
| closed-loop TF of model in z-domain | - | |
| angular height of figure-of-eight maneuver | rad | |
| tether length | m | |
| , | angular reference positions for FPP | rad |
| order of R-polynomial | - | |
| R | numerator polynomial of control TF | - |
| r | radial coordinate of kite | m |
| order of S-polynomial | - | |
| S | denominator polynomial of control TF | - |
| system input defined as in z-domain | - | |
| relative depower action | - | |
| relative steering action | - | |
| horizontal wind velocity at reference height | m/s | |
| , , | body-fixed kite reference frame | - |
| , , | small earth reference frame | - |
| , , | wind reference frame | - |
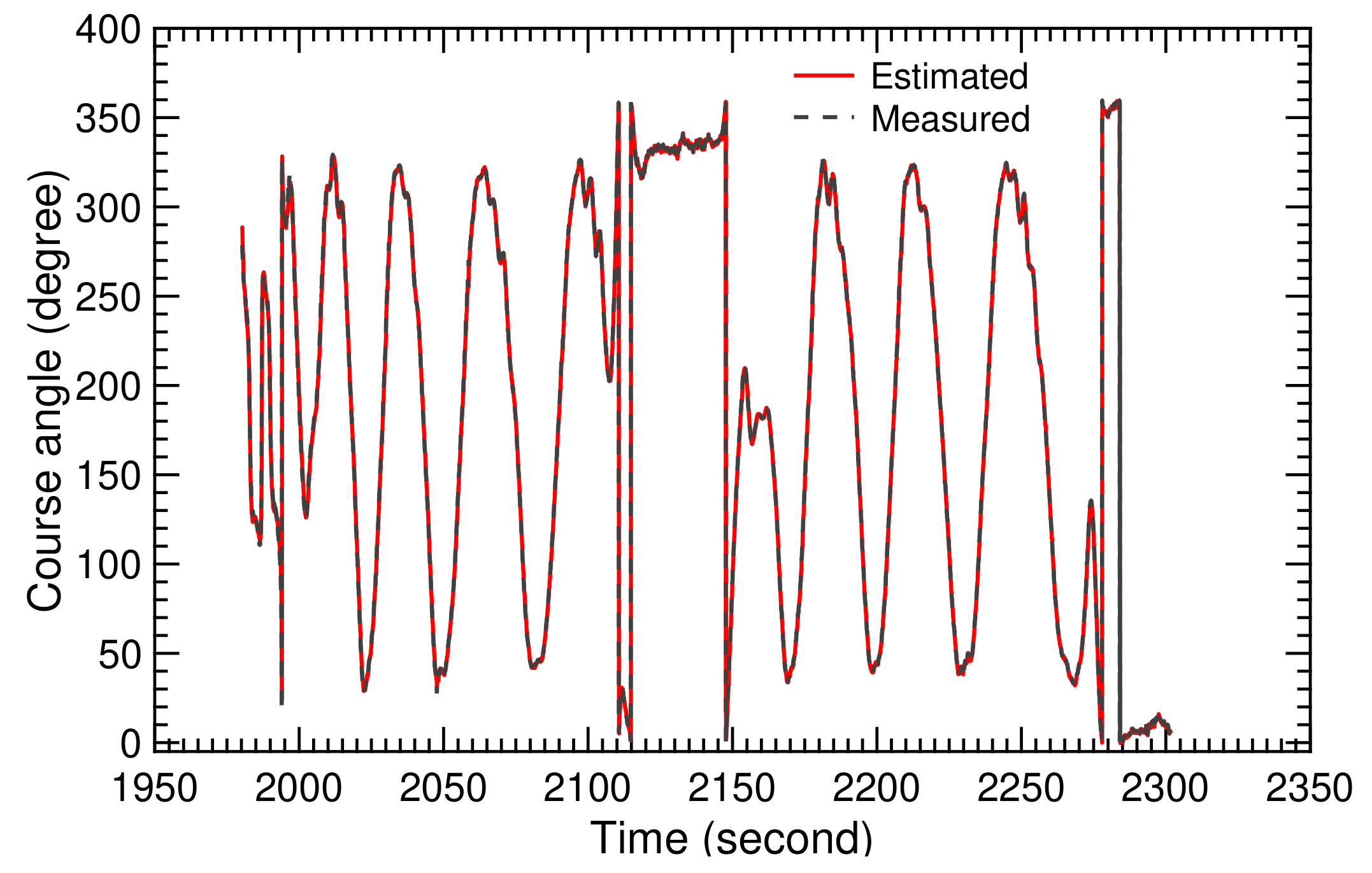
| estimated course angle obtained from system identification in z-domain | rad | |
| measured course angle obtained from sensor | rad | |
| backward shift operator in z-domain | - | |
| Greek Symbol | ||
| kite elevation angle | rad | |
| elevation angle to switch flight mode | rad | |
| kite course angle | ||
| rate of change of course angle | rad/s | |
| rate of change of course angle to fly a turn with radius R | rad/s | |
| set value for course angle | rad | |
| minimal angular attractor point distance | rad | |
| angular width of figure-of-eight maneuver | rad | |
| reference value of angular speed | rad/s | |
| kite azimuth angle | rad | |
| azimuth angle at point | rad | |
| set value of azimuth angle | rad | |
| azimuth angle to switch flight mode | rad | |
| kite heading angle | rad | |
| kite turn rate | rad/s | |
| turn radius of kite point trajectory | rad | |
| Vectors and Matrices | ||
| angular velocity of kite point with respect to origin | rad/s | |
| kite position in angular co-ordinates(, ) | rad | |
| covariance matrix of estimated error | - | |
| last vector estimated using least-squares estimation algorithm | - | |
| apparent wind speed | m/s | |
| kite velocity | m/s | |
| radial kite velocity component | m/s | |
| tangential kite velocity component | m/s | |
| data of old measurement of course angle and control action | - | |
| measured course angle obtained from sensor | rad | |
| Abbreviation | ||
| AWE | Airborne Wind Energy | |
| FPC | Flight Path Control | |
| FPP | Flight Path Planner | |
| HAWT | Horizontal Axis Wind Turbines | |
| KCU | Kite Control Unit | |
| LEI | Leading Edge Inflatable | |
| MSE | Mean Square Error | |
| NDI | Nonlinear Dynamic Inversion | |
| NMPC | Nonlinear Model Predictive Control | |
| PID | Proportional-Integral-Derivative | |
| SI | System Identification | |
| SISO | Single-Input Single-Output | |
| TF | Transfer Function | |
| TU Delft | Delft University of Technology | |
References
- Ahrens, U.; Diehl, M.; Schmehl, R. (Eds.) Airborne Wind Energy; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Cherubini, A.; Papini, A.; Vertechy, R.; Fontana, M. Airborne Wind Energy Systems: A review of the technologies. Renew. Sustain. Energy Rev. 2015, 51, 1461–1476. [Google Scholar] [CrossRef]
- Schmehl, R. (Ed.) Airborne Wind Energy—Advances in Technology Development and Research; Green Energy and Technology; Springer: Singapore, 2018. [Google Scholar] [CrossRef]
- Lago, J.; Erhard, M.; Diehl, M. Warping model predictive control for application in control of a real airborne wind energy system. Control Eng. Pract. 2018, 78, 65–78. [Google Scholar] [CrossRef]
- Van der Vlugt, R.; Peschel, J.; Schmehl, R. Design and experimental characterization of a pumping kite power system. In Airborne Wind Energy; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 23; pp. 403–425. [Google Scholar] [CrossRef]
- Goldstein, L. Airborne wind energy conversion systems with ultra high speed mechanical power transfer. In Airborne Wind Energy; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 13; pp. 235–247. [Google Scholar] [CrossRef]
- Diehl, M.; Leuthold, R.; Schmehl, R. (Eds.) The International Airborne Wind Energy Conference 2017: Book of Abstracts; University of Freiburg: Freiburg, Germany; Delft University of Technology: Delft, The Netherlands, 2017. [Google Scholar] [CrossRef]
- Van der Vlugt, R.; Bley, A.; Schmehl, R.; Noom, M. Quasi-steady model of a pumping kite power system. Renew. Energy 2019, 131, 83–99. [Google Scholar] [CrossRef]
- De Wachter, A. Power from the skies: Laddermill takes airborne wind energy to new heights. Leonardo Times J. Soc. Aerosp. Eng. Stud. VSV Leonardo da Vinci 2010, 10, 18–20. [Google Scholar]
- Bosch, A.; Schmehl, R.; Tiso, P.; Rixen, D. Dynamic nonlinear aeroelastic model of a kite for power generation. J. Guid. Control Dyn. 2014, 37, 1426–1436. [Google Scholar] [CrossRef]
- Fechner, U.; van der Vlugt, R.; Schreuder, E.; Schmehl, R. Dynamic model of a pumping kite power system. Renew. Energy 2015, 83, 705–716. [Google Scholar] [CrossRef]
- Fechner, U. A Methodology for the Design of Kite-Power Control Systems. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar] [CrossRef]
- Fechner, U.; Schmehl, R. Flight Path Planning in a Turbulent Wind Environment. In Airborne Wind Energy—Advances in Technology Development and Research; Schmehl, R., Ed.; Green Energy and Technology; Springer: Singapore, 2018; Chapter 15; pp. 361–390. [Google Scholar] [CrossRef]
- Breukels, J.; Schmehl, R.; Ockels, W. Aeroelastic Simulation of Flexible Membrane Wings based on Multibody System Dynamics. In Airborne Wind Energy; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 16; pp. 287–305. [Google Scholar] [CrossRef]
- Bosch, A.; Schmehl, R.; Tiso, P.; Rixen, D. Nonlinear Aeroelasticity, Flight Dynamics and Control of a Flexible Membrane Traction Kite. In Airborne Wind Energy; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 17; pp. 307–323. [Google Scholar] [CrossRef]
- Oehler, J.; Schmehl, R. Aerodynamic characterization of a soft kite by in situ flow measurement. Wind Energy Sci. 2019, 4, 1–21. [Google Scholar] [CrossRef]
- Erhard, M.; Strauch, H. Theory and Experimental Validation of a Simple Comprehensible Model of Tethered Kite Dynamics Used for Controller Design. In Airborne Wind Energy; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 8; pp. 141–165. [Google Scholar] [CrossRef]
- Fagiano, L.; Milanese, M.; Piga, D. Optimization of airborne wind energy generators. Int. J. Robust Nonlinear Control 2012, 22, 2055–2083. [Google Scholar] [CrossRef]
- Erhard, M.; Horn, G.; Diehl, M. A quaternion-based model for optimal control of an airborne wind energy system. ZAMM-J. Appl. Math. Mech./Zeitschrift für Angewandte Mathematik und Mechanik 2017, 97, 7–24. [Google Scholar] [CrossRef]
- Gros, S.; Zanon, M.; Diehl, M. A relaxation strategy for the optimization of Airborne Wind Energy systems. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 1011–1016. [Google Scholar]
- Rawlings, J.B.; Amrit, R. Optimizing process economic performance using model predictive control. In Nonlinear Model Predictive Control; Magni, L., Raimondo, D.M., Allgöwer, F., Eds.; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2009; Volume 384, pp. 119–138. [Google Scholar] [CrossRef]
- Winter, M.; Schmidt, E.; Silva de Oliveira, R. An open-source software platform for AWE systems. In Book of Abstracts of the International Airborne Wind Energy Conference 2017; Diehl, M., Leuthold, R., Schmehl, R., Eds.; University of Freiburg: Freiburg, Germany; Delft University of Technology: Delft, The Netherlands, 2017; p. 140. Available online: http://awec2017.com/images/posters/Poster_Araujo.pdf (accessed on 28 January 2020).
- Sieg, C.; Gehrmann, T.; Bechtle, P.; Zillmann, U. AWEsome: An Affordable Standardized Open-Source Test Platform for AWE Systems. In Book of Abstracts of the International Airborne Wind Energy Conference 2017; Diehl, M., Leuthold, R., Schmehl, R., Eds.; University of Freiburg: Freiburg, Germany; Delft University of Technology: Delft, The Netherlands, 2017; p. 24. Available online: http://awec2017.com/images/posters/Poster_Sieg.pdf (accessed on 28 January 2020).
- Dunker, S. Tether and Bridle Line Drag in Airborne Wind Energy Applications. In Airborne Wind Energy; Schmehl, R., Ed.; Green Energy and Technology; Springer: Singapore, 2018; pp. 29–56. [Google Scholar] [CrossRef]
- Rapp, S.; Schmehl, R. Vertical takeoff and landing of flexible wing kite power systems. J. Guid. Control Dyn. 2018, 41, 2386–2400. [Google Scholar] [CrossRef]
- Fagiano, L.; Zgraggen, A.U.; Morari, M.; Khammash, M. Automatic crosswind flight of tethered wings for airborne wind energy: Modeling, control design and experimental results. IEEE Trans. Control Syst. Technol. 2014, 22, 1433–1447. [Google Scholar] [CrossRef]
- Alvin, K.F.; Park, K. Second-order structural identification procedure via state-space-based system identification. AIAA J. 1994, 32, 397–406. [Google Scholar] [CrossRef]
- Dief, T.N.; Fechner, U.; Schmehl, R.; Yoshida, S.; Ismaiel, A.M.; Halawa, A.M. System identification, fuzzy control and simulation of a kite power system with fixed tether length. Wind Energy Sci. 2018, 3, 275–291. [Google Scholar] [CrossRef]
- Plackett, R.L. Some theorems in least squares. Biometrika 1950, 37, 149–157. [Google Scholar] [CrossRef] [PubMed]
- Dutton, K.; Thompson, S.; Barraclough, B. Adaptive and self-tunning control. In The Art of Control Engineering; Addison-Wesley Longman Publishing Co., Inc.: Reading, MA, USA, 1997; Chapter 11; pp. 560–582. [Google Scholar]
- Jehle, C.; Schmehl, R. Applied tracking control for kite power systems. J. Guid. Control Dyn. 2014, 37, 1211–1222. [Google Scholar] [CrossRef]
- Baayen, J.H.; Ockels, W.J. Tracking control with adaption of kites. IET Control Theory Appl. 2012, 6, 82–191. [Google Scholar] [CrossRef]
- Burns, R. Advanced Control Engineering, 1st ed.; Butterworth-Heinemann: London, UK, 2001. [Google Scholar] [CrossRef]
- Hager, W.W. Updating the inverse of a matrix. SIAM Rev. 1989, 31, 221–239. [Google Scholar] [CrossRef]
- Bobál, V.; Böhm, J.; Fessl, J.; Machácek, J. Digital Self-Tuning Controllers: Algorithms, Implementation And Applications; Springer: London, UK, 2005. [Google Scholar]
- Ibrahim, D. System Stability. In Microcontroller Based Applied Digital Control; Ibrahim, D., Ed.; Wiley Online Library: New Delhi, India, 2006; Chapter 8; pp. 187–211. [Google Scholar] [CrossRef]
- Lee, S.G.; Vu, Q.P. Simultaneous solutions of Sylvester equations and idempotent matrices separating the joint spectrum. Linear Algebra Its Appl. 2011, 435, 2097–2109. [Google Scholar] [CrossRef]
- Schmehl, R.; Fechner, U. Kite Power Flight Data 2011–2015; Data Set; 4TU. Centre for Research Data: Delft, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Salma, V.; Friedl, F.; Schmehl, R. Improving Reliability and Safety of Airborne Wind Energy Systems. Wind Energy 2020, 23, 340–356. [Google Scholar] [CrossRef]
- Schmehl, R.; Noom, M.; van der Vlugt, R. Traction Power Generation with Tethered Wings. In Airborne Wind Energy; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 2; pp. 23–45. [Google Scholar] [CrossRef]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Next State | Switch Condition | ||
|---|---|---|---|---|
| Initial | TURN_LEFT | – | ALWAYS | |
| TURN_LEFT | FLY_RIGHT | from PID | ||
| FLY_RIGHT | TURN_RIGHT | – | ||
| TURN_RIGHT | FLY_LEFT | from PID | ||
| FLY_LEFT | TURN_LEFT | – |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dief, T.N.; Fechner, U.; Schmehl, R.; Yoshida, S.; Rushdi, M.A. Adaptive Flight Path Control of Airborne Wind Energy Systems. Energies 2020, 13, 667. https://doi.org/10.3390/en13030667
Dief TN, Fechner U, Schmehl R, Yoshida S, Rushdi MA. Adaptive Flight Path Control of Airborne Wind Energy Systems. Energies. 2020; 13(3):667. https://doi.org/10.3390/en13030667
Chicago/Turabian StyleDief, Tarek N., Uwe Fechner, Roland Schmehl, Shigeo Yoshida, and Mostafa A. Rushdi. 2020. "Adaptive Flight Path Control of Airborne Wind Energy Systems" Energies 13, no. 3: 667. https://doi.org/10.3390/en13030667
APA StyleDief, T. N., Fechner, U., Schmehl, R., Yoshida, S., & Rushdi, M. A. (2020). Adaptive Flight Path Control of Airborne Wind Energy Systems. Energies, 13(3), 667. https://doi.org/10.3390/en13030667