Full-Order Sliding Mode Observer Based on Synchronous Frequency Tracking Filter for High-Speed Interior PMSM Sensorless Drives



Abstract
1. Introduction
2. The Method of Position Estimation Based on the Traditional Second-Order SMO
2.1. Extened EMF Model of IPMSM
2.2. Traditional Second-Order SMO of IPMSM
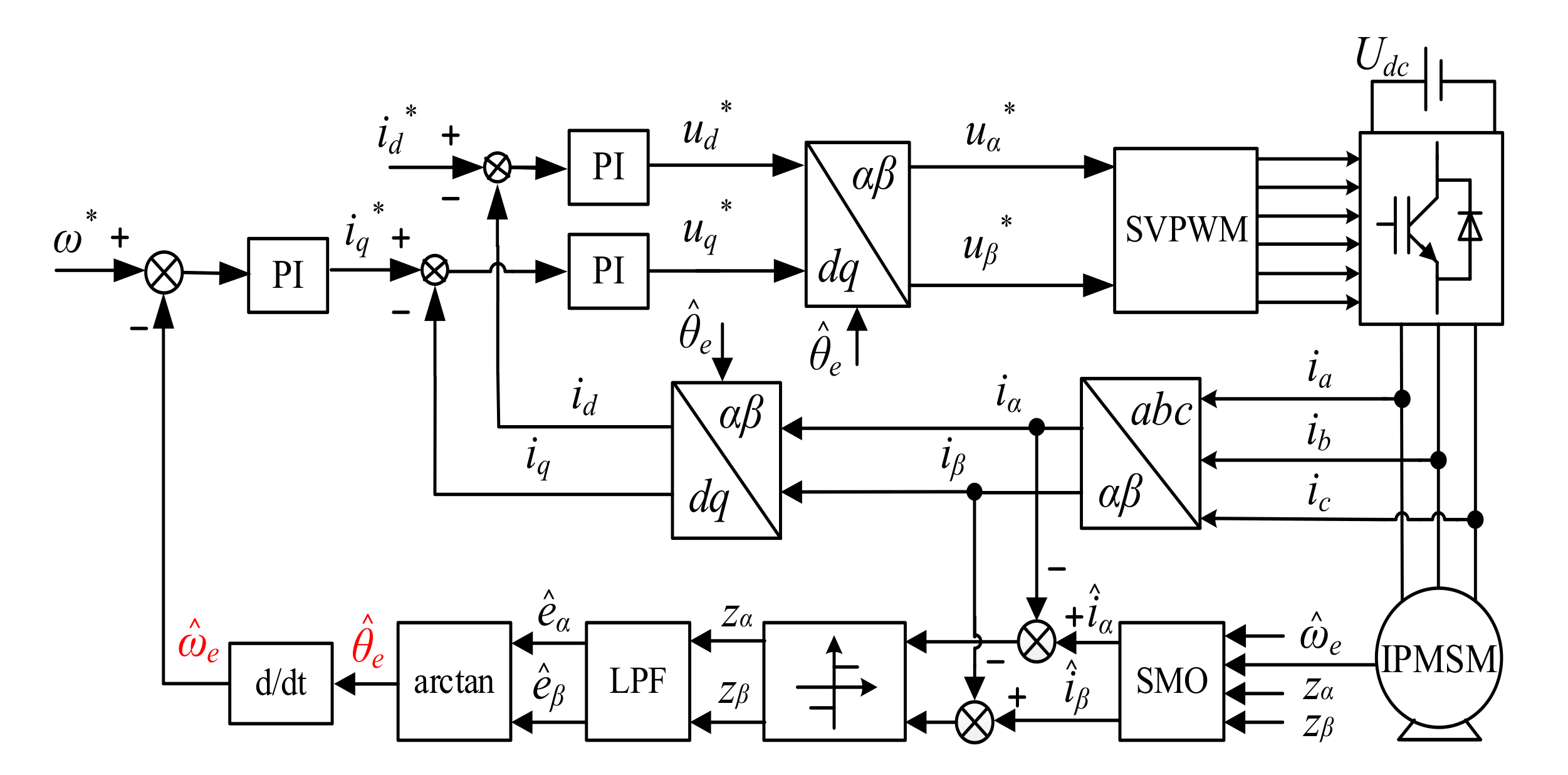
3. Proposed Rotor-Speed Sensorless-Control Method of Full-Order SMO Based on SFT Filter and Luenberger Observer
3.1. Full-Order SMO Method
3.2. Construction of Synchronous Frequency Tracking Filter
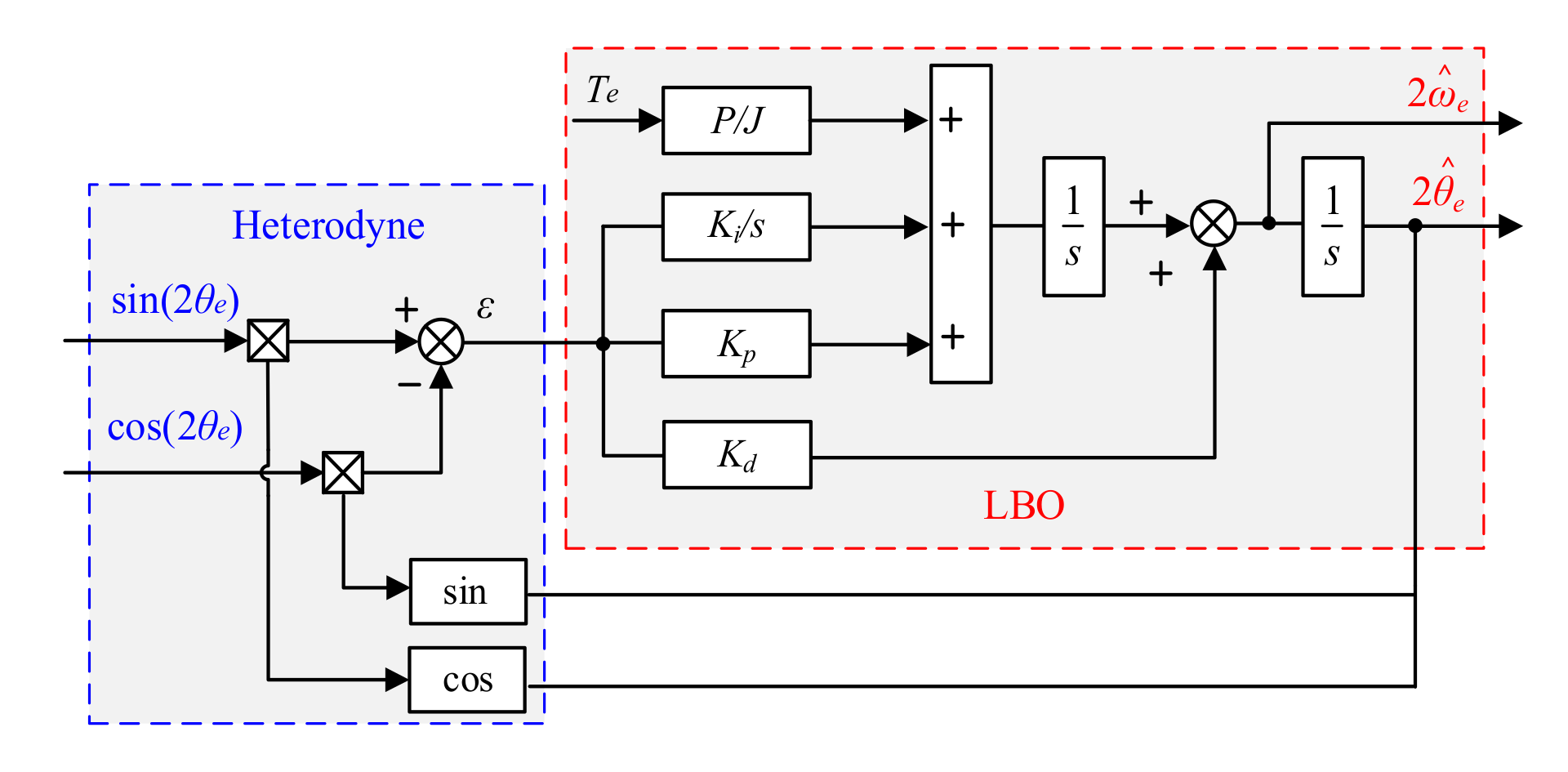
3.3. Luenberger-Based Observer Processing
3.4. Phase Compensation Design
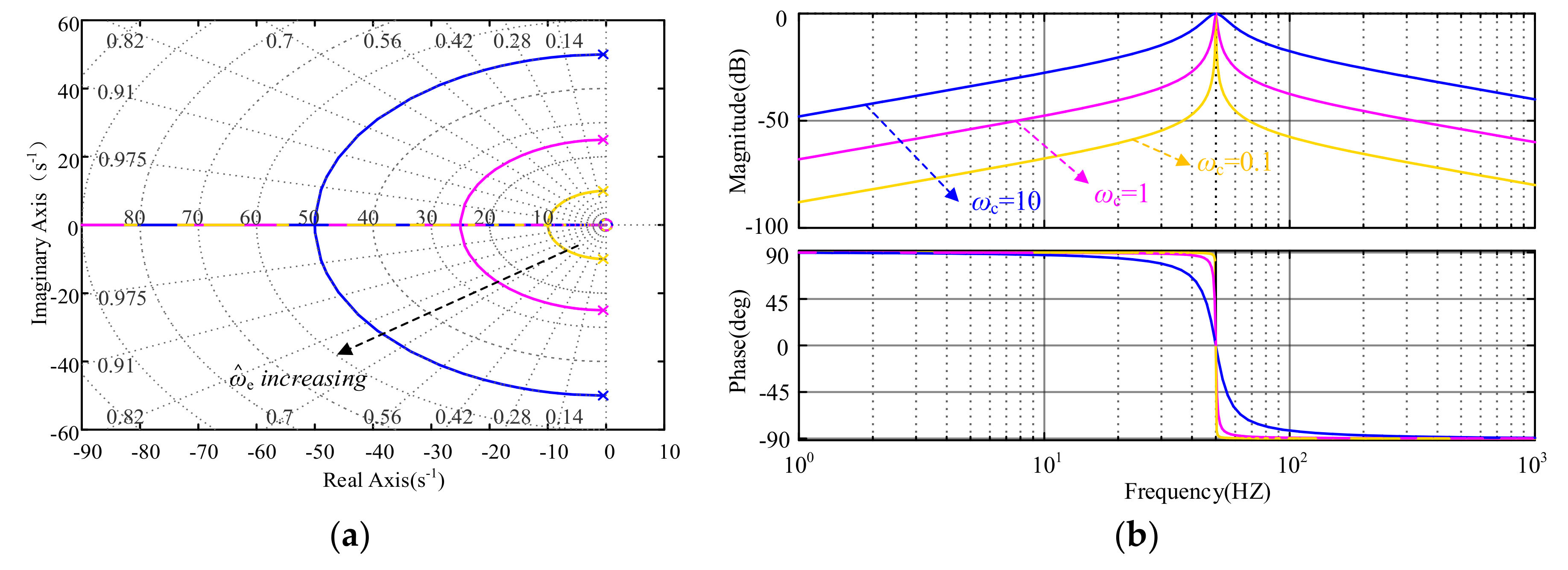
3.5. Stability Analysis of the Speed Observer System
4. Simulation and Experimental Results of the Proposed Method
4.1. Simulation Results
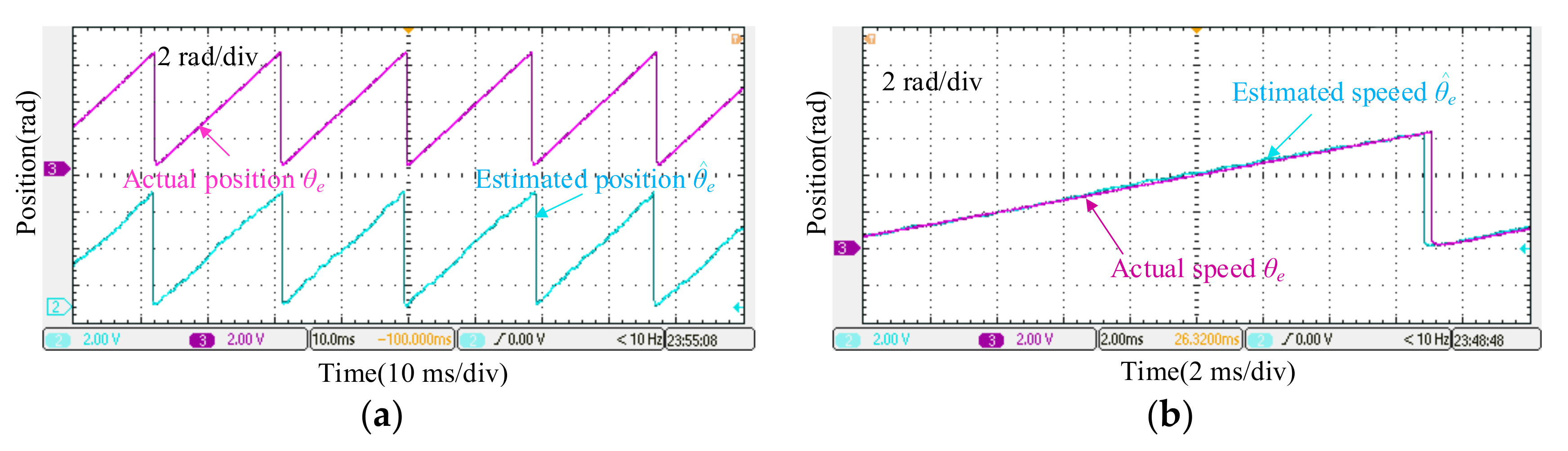
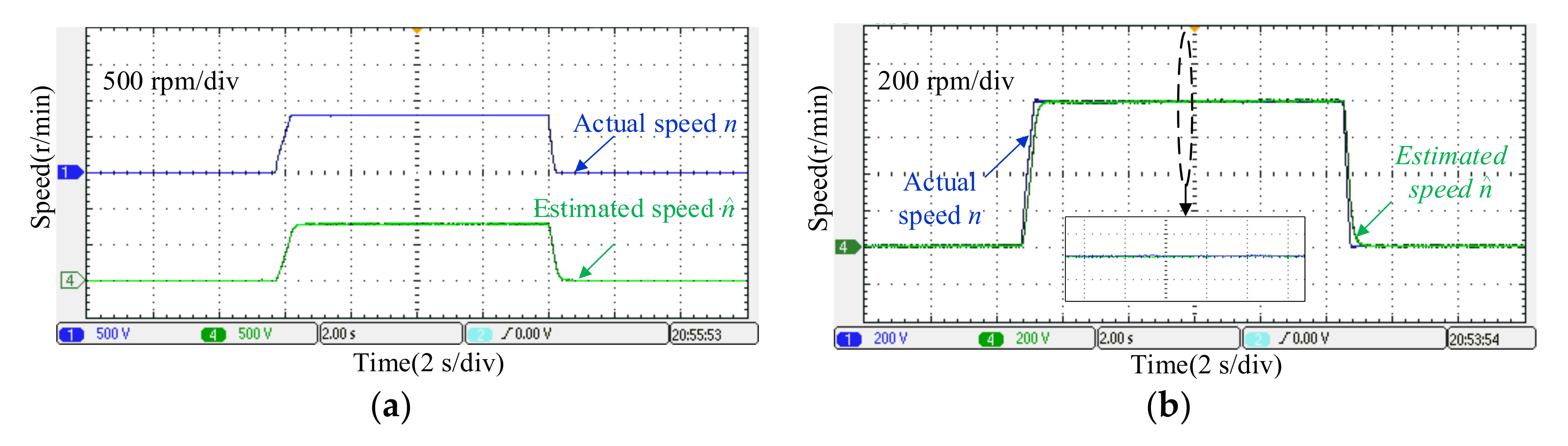
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gokasan, M.; Bogosyan, S.; Goering, D. Sliding mode based powertrain control for efficiency improvement in series hybrid-electric vehicles. IEEE Trans. Power Electron. 2006, 21, 779–790. [Google Scholar] [CrossRef]
- Melfi, M.J.; Evon, S.; McElveen, R. Induction versus permanent magnet motors. IEEE Ind. Appl. Mag. 2009, 15, 28–35. [Google Scholar] [CrossRef]
- Singh, S.; Tiwari, A.N. Various techniques of sensorless speed control of PMSM: A review. In Proceedings of the 2017 Second International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 22–24 February 2017; pp. 1–6. [Google Scholar]
- Liu, K.; Zhu, Z.Q. Quantum Genetic Algorithm-Based Parameter Estimation of PMSM under Variable Speed Control Accounting for System Identifiability and VSI Nonlinearity. IEEE Trans. Ind. Electron. 2014, 62, 2363–2371. [Google Scholar] [CrossRef]
- Gao, Y.; Ehsani, M. Parametric design of the traction motor and energy storage for series hybrid off-road and military vehicles. IEEE Trans. Power Electron. 2006, 21, 749–755. [Google Scholar]
- Lefebvre, G.; Gauthier, J.-Y.; Hijazi, A.; Lin-Shi, X.; Le Digarcher, V. Observability-Index-Based Control Strategy for Induction Machine Sensorless Drive at Low Speed. IEEE Trans. Ind. Electron. 2017, 64, 1929–1938. [Google Scholar] [CrossRef]
- Pereira, W.C.A.; Oliveira, C.M.R.; Santana, M.P.; Almeida, T.E.P.; Castro, A.G.; Paula, G.T.; Aguiar, M.L. Improved Sensorless Vector Control of Induction motor Using Sliding Mode Observer. IEEE Lat. Am. Trans. 2016, 14, 3110–3116. [Google Scholar] [CrossRef]
- Yang, S.; Li, X.; Ding, D.; Zhang, X.; Xie, Z. Speed sensorless control of induction motor based on sliding-mode observer and MRAS. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 1889–1893. [Google Scholar]
- Utkin, V.I.; Guldner, J.; Shi, J. Sliding Mode Control in Electro-Mechanical Systems; Taylor & Francis Group: New York, NY, USA, 2009. [Google Scholar]
- Lee, K.; Choy, I.; Back, J.; Choi, J. Disturbance observer based sensorless speed controller for PMSM with improved robustness against load torque variation. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 2537–2543. [Google Scholar]
- Hu, J.; Zou, J.; Xu, F.; Li, Y.; Fu, Y. An Improved PMSM Rotor Position Sensor Based on Linear Hall Sensors. IEEE Trans. Magn. 2012, 48, 3591–3594. [Google Scholar] [CrossRef]
- Weber, A.R.; Steiner, G. An accurate identification and compensation method for nonlinear inverter characteristics for ac motor drives. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 821–826. [Google Scholar]
- Edwards, C.; Shtessel, Y.B. Adaptive Continuous Higher Order Sliding Mode Control. Automatica 2016, 65, 183–190. [Google Scholar] [CrossRef]
- Roy, S.; Baldi, S.; Fridman, L.M. On adaptive sliding mode control without a priori bounded uncertainty. Automatica 2020, 111, 108650. [Google Scholar] [CrossRef]
- Shtessel, Y.B.; Taleb, M.; Plestan, F. A novel adaptive-gain supertwisting sliding mode controller: Methodology and application. Automatica 2012, 48, 759–769. [Google Scholar] [CrossRef]
- Roy, S.; Roy, S.B.; Lee, J.; Baldi, S. Overcoming the Underestimation and Overestimation Problems in Adaptive Sliding Mode Control. IEEE/ASME Trans. Mechatron. 2019, 24, 2031–2039. [Google Scholar] [CrossRef]
- Bedetti, N.; Calligaro, S.; Petrella, R. Accurate modeling, compensation and self-commissioning of inverter voltage distortion for high-performance motor drives. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition—APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 1550–1557. [Google Scholar]
- Wang, T.; Zhang, H.; Gao, Q.; Xu, Z.; Li, J.; Gerada, C. Enhanced Self-Sensing Capability of Permanent-Magnet Synchronous Machines: A Novel Saliency Modulation Rotor End Approach. IEEE Trans. Ind. Electron. 2016, 64, 3548–3556. [Google Scholar] [CrossRef]
- Kumar, K.V.K.S.S.; Rao, B.V.; Kumar, G.V.E.S. Fractional order PLL based sensorless control of PMSM with sliding mode observer. In Proceedings of the 2018 International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 18–20 January 2018; pp. 1–6. [Google Scholar]
- Song, X.; Fang, J.; Han, B.; Zheng, S. Adaptive Compensation Method for High-Speed Surface PMSM Sensorless Drives of EMF-Based Position Estimation Error. IEEE Trans. Power Electron. 2016, 31, 1438–1449. [Google Scholar] [CrossRef]
- Jung, S.-H.; Kobayashi, H.; Doki, S.; Okuma, S. An improvement of sensorless control performance by a mathematical modelling method of spatial harmonics for a SynRM. In Proceedings of the 2010 International Power Electronics Conference—ECCE&ASIA, Sapporo, Japan, 21–24 June 2010; pp. 2010–2015. [Google Scholar]
- Bao, D.; Wang, Y.; Pan, X.; Wang, X.; Li, K. Improved sensorless control method combining SMO and MRAS for surface PMSM drives. In Proceedings of the 2017 IEEE Industry Applications Society Annual Meeting, Cincinnati, OH, USA, 1–5 October 2017; pp. 1–5. [Google Scholar]
- Shi, Y.; Sun, K.; Huang, L.; Li, Y. Online Identification of Permanent Magnet Flux Based on Extended Kalman Filter for IPMSM Drive With Position Sensorless Control. IEEE Trans. Ind. Electron. 2012, 59, 4169–4178. [Google Scholar] [CrossRef]
- Auger, F.; Hilairet, M.; Guerrero, J.M.; Monmasson, E.; Orlowska-Kowalska, T.; Katsura, S. Industrial Applications of the Kalman Filter: A Review. IEEE Trans. Ind. Electron. 2013, 60, 5458–5471. [Google Scholar] [CrossRef]
- Underwood, S.J.; Husain, I. Online Parameter Estimation and Adaptive Control of Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2010, 57, 2435–2443. [Google Scholar] [CrossRef]
- Liu, K.; Zhu, Z.-Q.; Stone, D.A. Parameter estimation for condition monitoring of PMSM stator winding and rotor permanent magnets. IEEE Trans. Ind. Electron. 2013, 60, 5902–5913. [Google Scholar] [CrossRef]
- Luo, X.; Shen, A.; Cao, W.; Rao, W. Full order state observer of stator flux for permanent magnet synchronous motor based on parameter adaptive identification. In Proceedings of the 2013 IEEE 8th Conference on Industrial Electronics and Applications (ICIEA), Melbourne, Australia, 19–21 June 2013; pp. 1456–1461. [Google Scholar]
- Chan, T.F.; Wang, W.; Wong, Y.K.; Borsje, P.; Ho, S.L. Sensorless permanent-magnet synchronous motor drive using a reduced-order rotor flux observer. IET Electr. Power Appl. 2008, 2, 88–98. [Google Scholar] [CrossRef]
- Bao, D.; Pan, X.; Wang, Y.; Wang, X.; Li, K. Adaptive Synchronous-Frequency Tracking-Mode Observer for the Sensorless Control of a Surface PMSM. IEEE Trans. Ind. Appl. 2018, 54, 6460–6471. [Google Scholar] [CrossRef]
- Wang, G.; Zhan, H.; Zhang, G.; Gui, X.; Xu, D. Adaptive Compensation Method of Position Estimation Harmonic Error for EMF-Based Observer in Sensorless IPMSM Drives. IEEE Trans. Power Electron. 2013, 29, 3055–3064. [Google Scholar] [CrossRef]
- Bernard, P.; Praly, L. Robustness of rotor position observer for permanent magnet synchronous motors with unknown magnet flux. IFAC-Pap. 2017, 50, 15403–15408. [Google Scholar] [CrossRef]
- He, L.; Wang, F.; Wang, J.; Rodriguez, J.A. Zynq Implemented Luenberger Disturbance Observer Based Predictive Control Scheme for PMSM Drives. IEEE Trans. Power Electron. 2019, 35, 1770–1778. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| Vdc | Rated Voltage | 220 V |
| I | Rated Current | 14.7 A |
| n | Rated Speed | 2500 r/min |
| S | Rated Power | 2500 W |
| Rs | Resistance | 0.7 Ω |
| Ld | d-axis Inductance | 3.2 mH |
| Lq | q-axis Inductance | 4.0 mH |
| p | Magnetic Pole Pairs | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, D.; Wu, H.; Wang, R.; Zhao, F.; Pan, X. Full-Order Sliding Mode Observer Based on Synchronous Frequency Tracking Filter for High-Speed Interior PMSM Sensorless Drives. Energies 2020, 13, 6511. https://doi.org/10.3390/en13246511
Bao D, Wu H, Wang R, Zhao F, Pan X. Full-Order Sliding Mode Observer Based on Synchronous Frequency Tracking Filter for High-Speed Interior PMSM Sensorless Drives. Energies. 2020; 13(24):6511. https://doi.org/10.3390/en13246511
Chicago/Turabian StyleBao, Danyang, Huiming Wu, Ruiqi Wang, Fei Zhao, and Xuewei Pan. 2020. "Full-Order Sliding Mode Observer Based on Synchronous Frequency Tracking Filter for High-Speed Interior PMSM Sensorless Drives" Energies 13, no. 24: 6511. https://doi.org/10.3390/en13246511
APA StyleBao, D., Wu, H., Wang, R., Zhao, F., & Pan, X. (2020). Full-Order Sliding Mode Observer Based on Synchronous Frequency Tracking Filter for High-Speed Interior PMSM Sensorless Drives. Energies, 13(24), 6511. https://doi.org/10.3390/en13246511