Experimental Platform for Evaluation of On-Board Real-Time Motion Controllers for Electric Vehicles





Abstract
1. Introduction
- Signal HIL Simulation. The purpose of this type is to validate the performance of the developed controller in actual operation. Whereas, the controlled system is simulated based on its mathematical model and implemented on a real-time platform [20]. In order to do that, the equivalent model must act with similar behaviors to what it simulates and, furthermore, the model should imitate the real system to make the controller "reckon" that it is working with a real process. On the controller side, the algorithm should be programmed and compiled in order to run on a chosen processing hardware with all interfaces designed as a real Electronic Control Unit (ECU).
- Power HIL Simulation consists of two types, including Full-scale and Reduced-scale power HIL simulation.
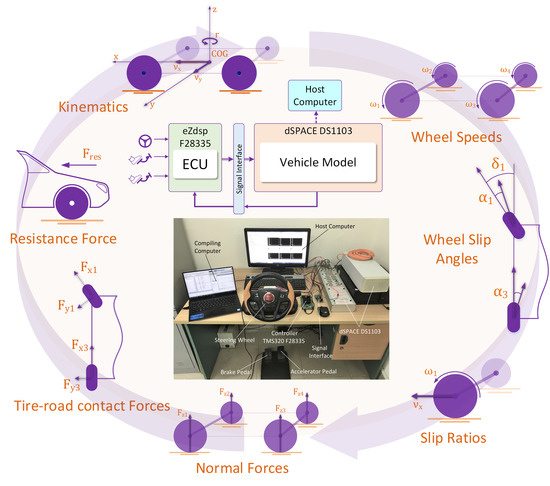
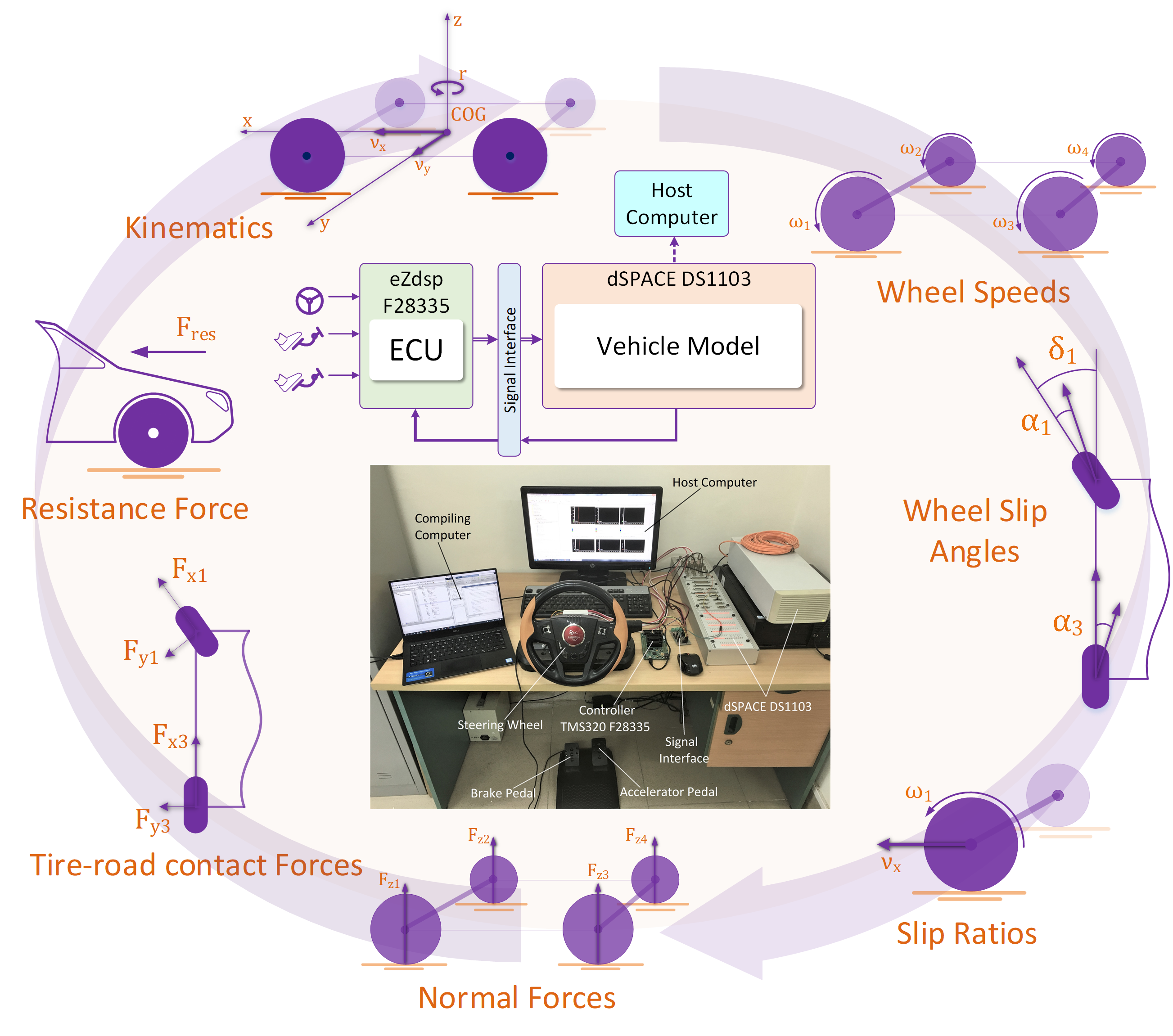
- The proposed system describes in details the dynamics and kinematics of four in-wheel-motors (4-IWM) EVs in both longitudinal and lateral motions, which are the typical moving directions used in motion control.
- The experimental platform of the paper is well fitted to the development of motion control systems, including traction/braking control, stability control, and driving force distribution strategy particularly for 4-IWM EVs.
- The signal HIL simulation system is built from available, common, and reasonable hardware platforms that encourages research on EVs as safer and greener means of transportation.
2. Experimental Platform Realization
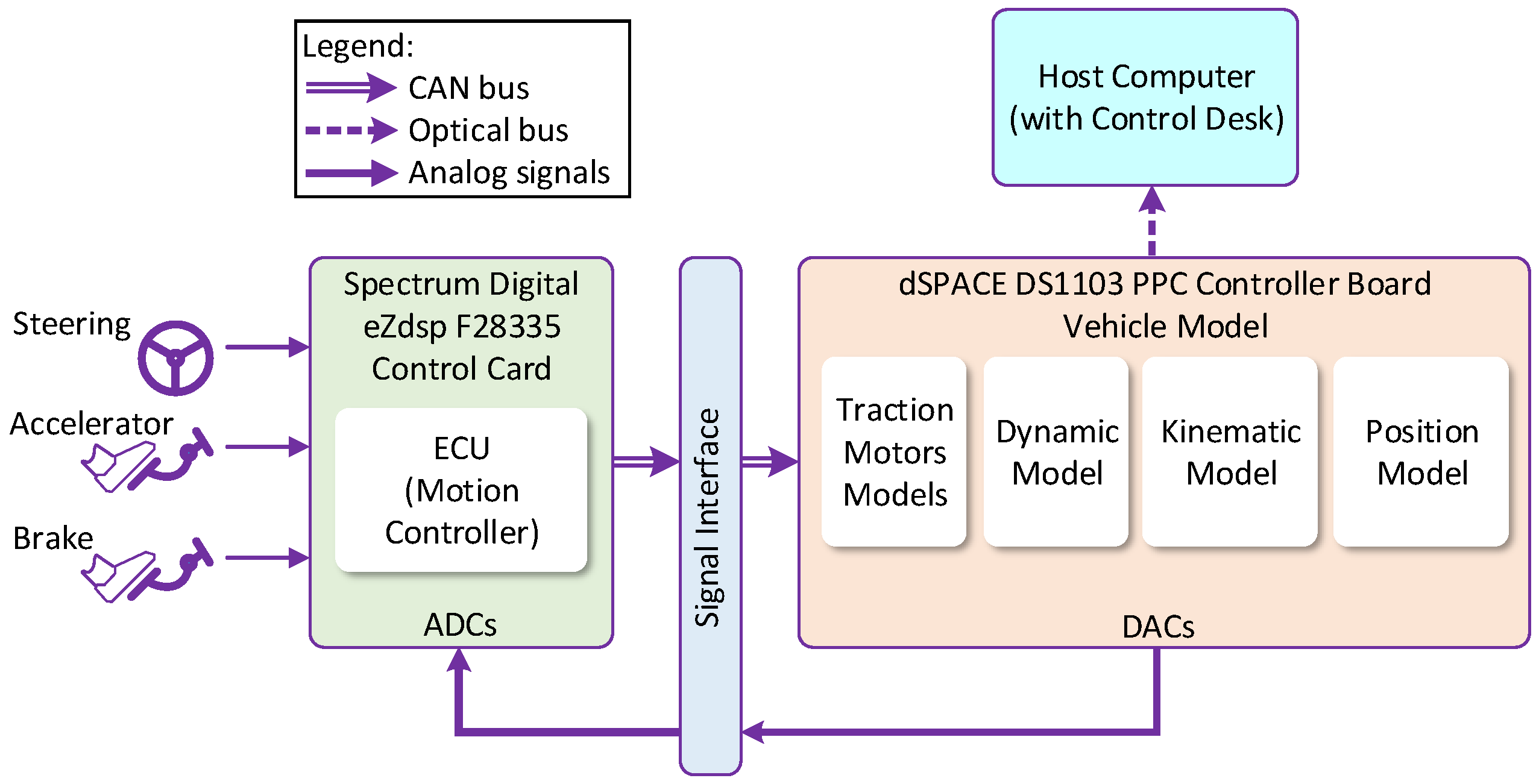
2.1. System Configuration
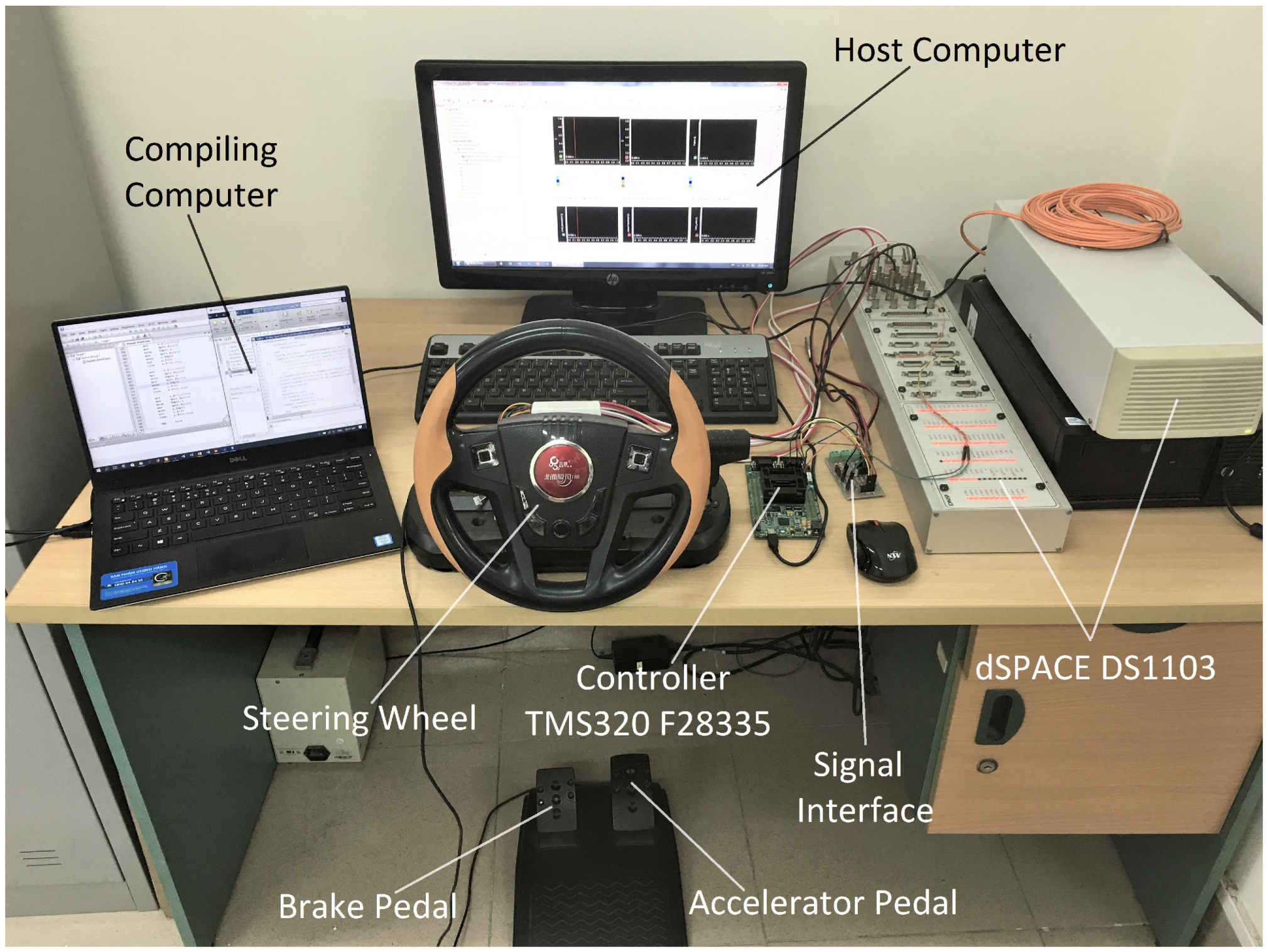
2.2. Hardware Realization
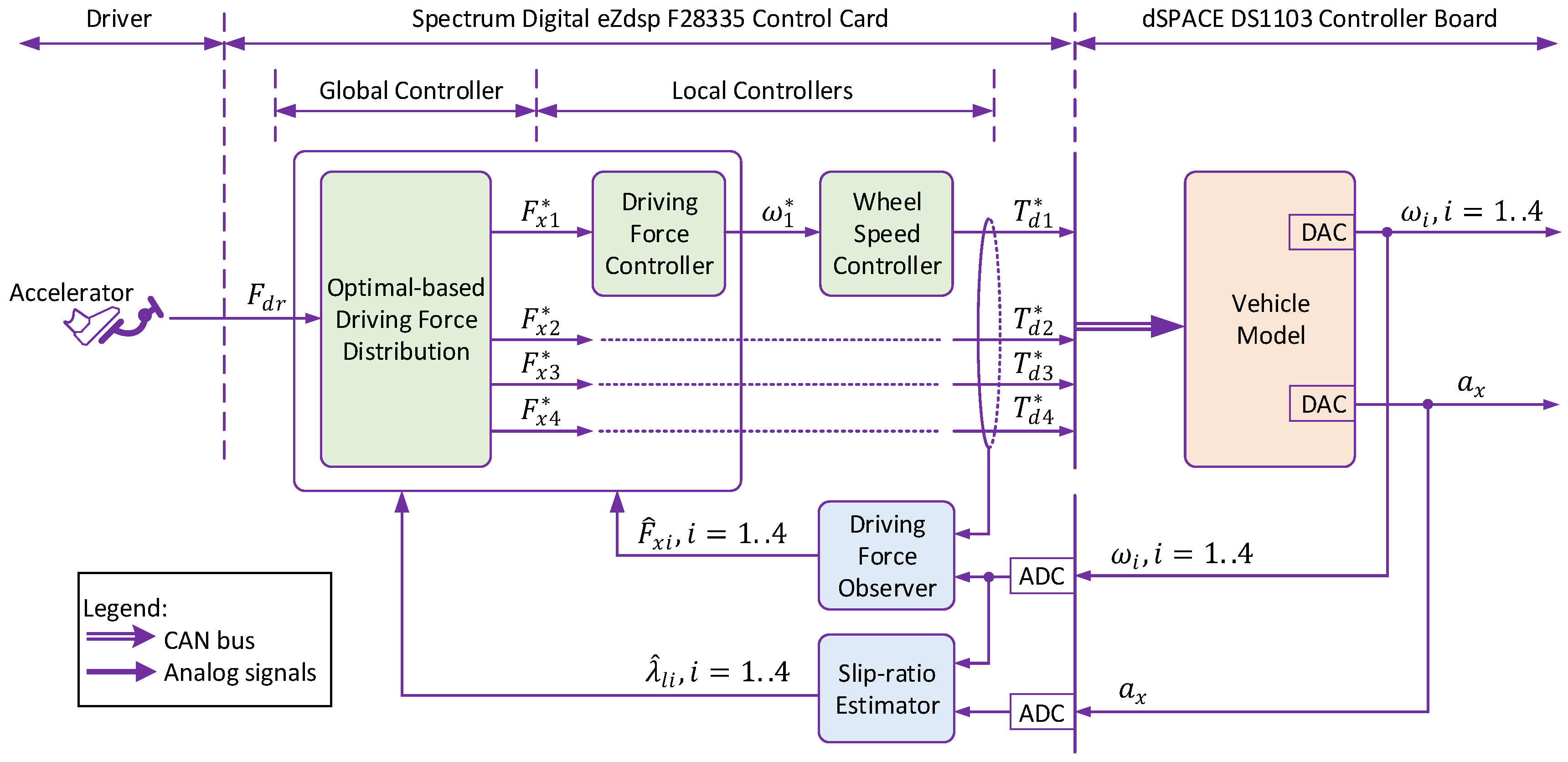
- All of the inputs and outputs of the model must be defined with proper I/Os of the DS1103. Unlike in the simulation, where all of the control signals as well as feedback information can be directly linked between the controller and the EV model, as illustrated in Figure 2 and referred to Figure 1, the control signals are transferred through CAN bus communication protocol, other states of the EV are converted into analog signals and exchanged among the platforms. Accordingly, such information must be assigned to appropriate hardware I/Os.
- Typically, the calculated values in the model are represented in floating-point data type, whereas the CAN bus protocol uses unsigned integer in its data field, therefore, data conversion should be taken into account not only for DS1103, but also for all hardware platforms.
- The sample time is the fundamental factor that needs to be carefully chosen. It is the constant iteration of time, in which all computations of the model are repeated. The smaller sample time is used, the more precise model will be but as a trade-off, the higher computational hardware may be required. In this paper, a sample time of 0.5 ms is used.
- After such preparation, the EV model can be complied and downloaded to deploy on the DS1103.
3. Mathematical Model of 4 In-Wheel-Motor Electric Vehicles
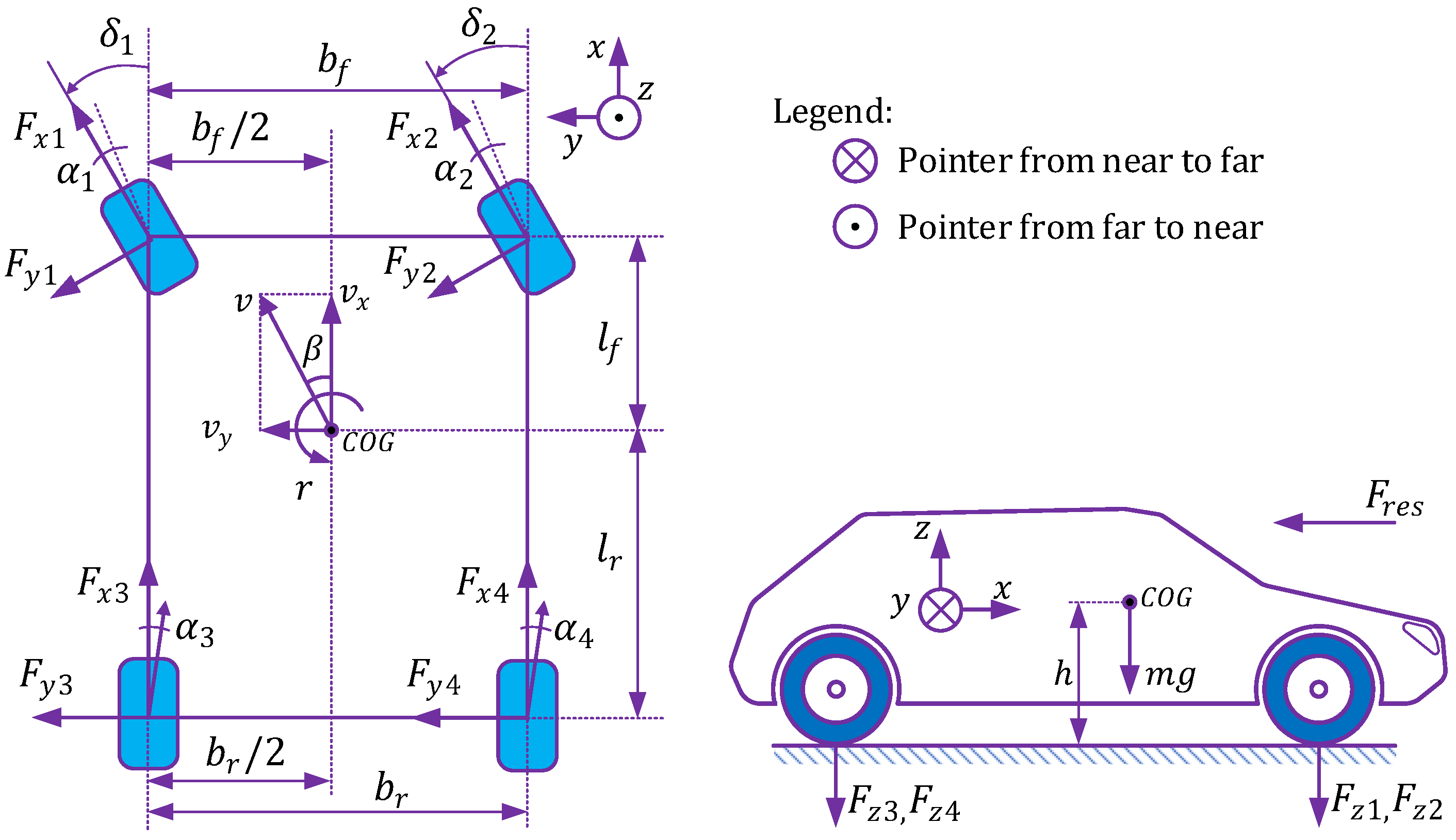
3.1. Vehicle Dynamic Model
- The vehicle adopts the two-front-wheel steering system. Therefore, both rear wheels are fixed at rear axle as non-steering ones.
- The vehicle is considered to be moving in longitudinal, lateral and yaw directions only, i.e., reduced to three degrees of freedom.
3.1.1. Force and Torque Balance Dynamic Model
3.1.2. Steering Angle Distribution
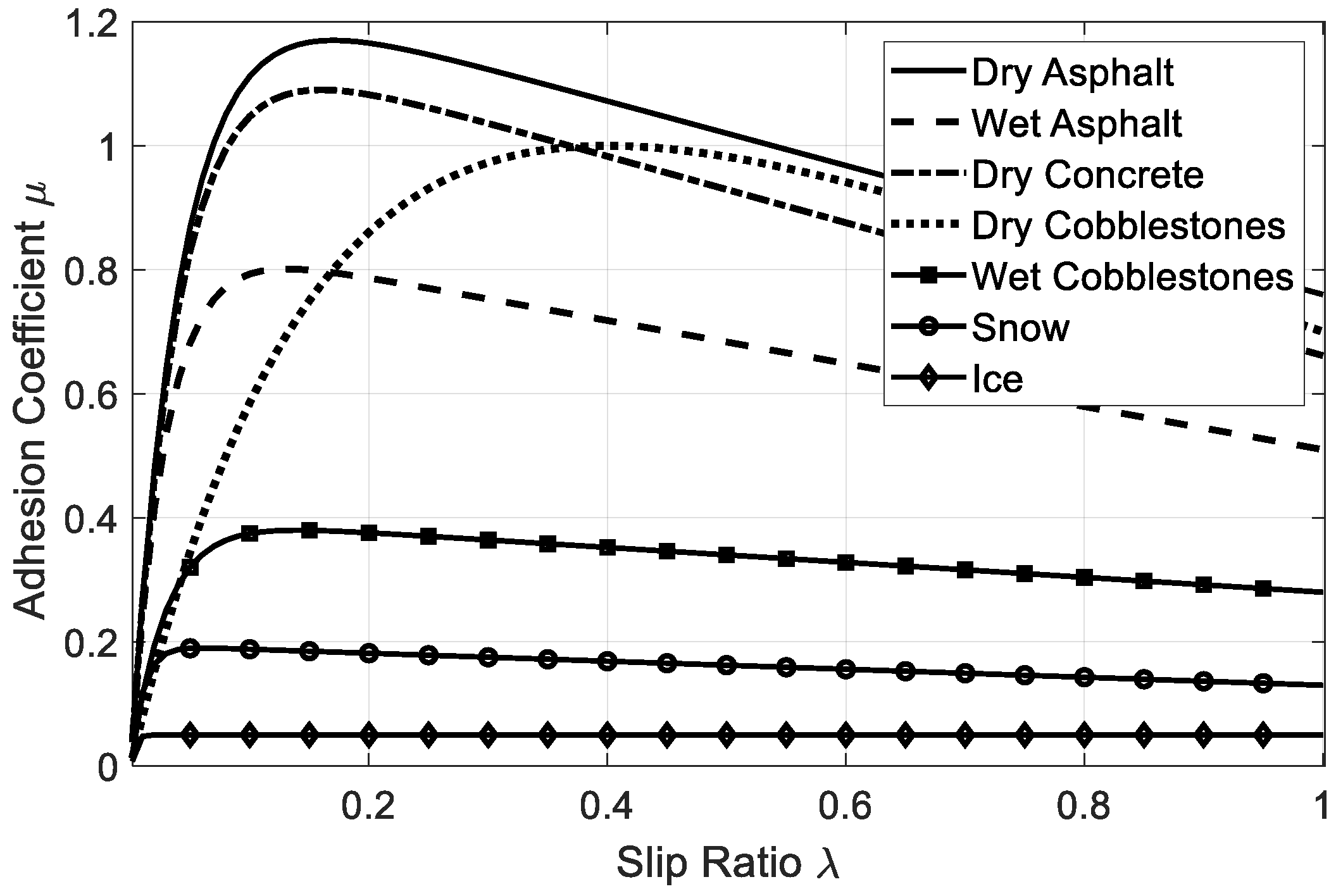
3.1.3. Tire-Road Behavior Model
3.1.4. Slip-Ratio Determination
3.1.5. Wheel Longitudinal Velocity
3.1.6. Side-Slip Angle Determination
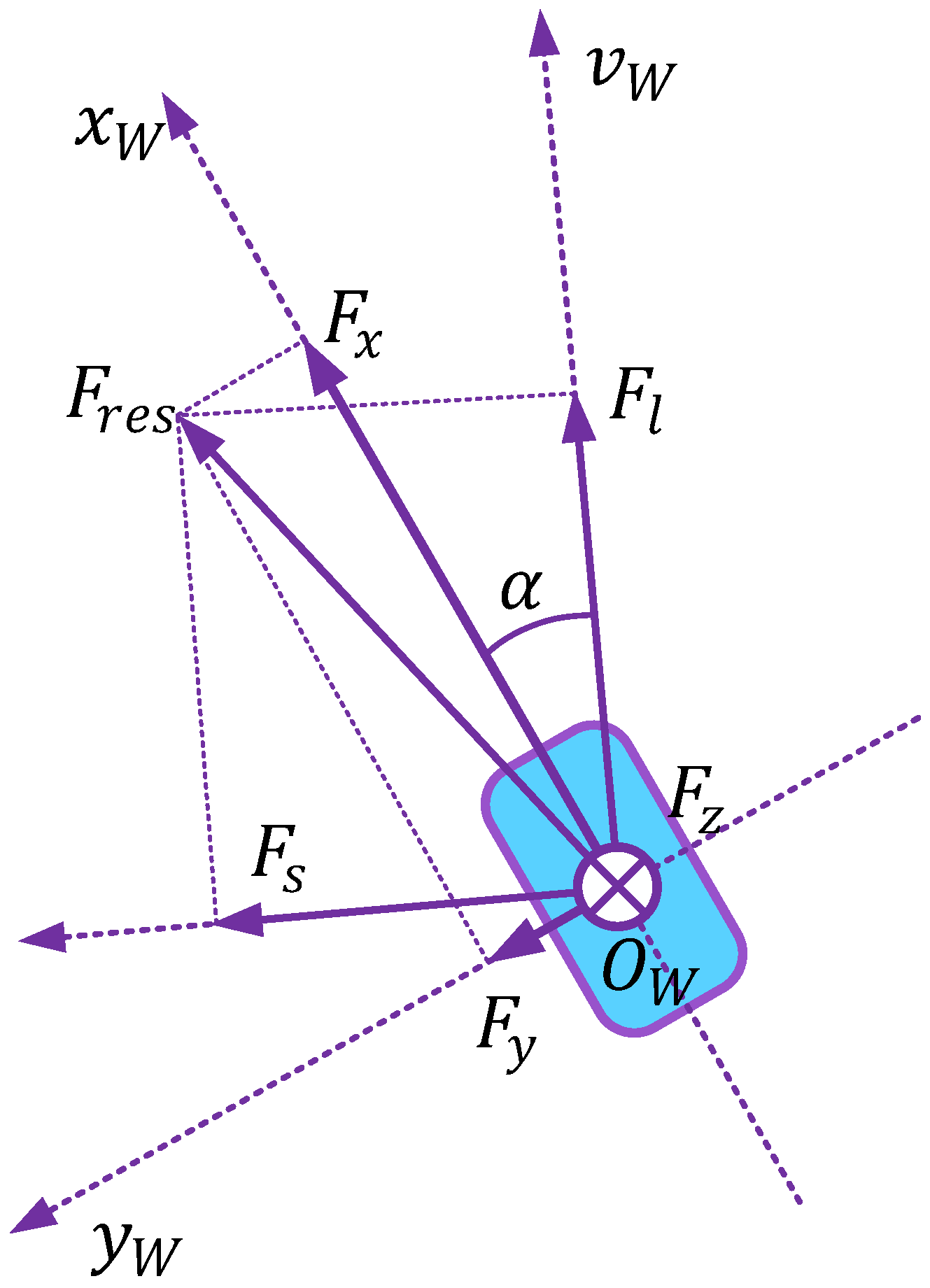
3.1.7. Forces Acting on a Wheel
3.1.8. Calculation of Normal Forces
3.2. Vehicle Kinematic Model
3.3. Traction Motors Modeling
- Very fast response. The average response time of an electric motor is around 1–5 ms, which is hundreds of times faster than that of the ICE. Therefore, the vehicle can react quickly to unexpected circumstances in the safety aspect.
- Direct torsion torque control. By measuring and controlling the current of the motor, one can apply torque precisely and very fast to the wheels. This unique characteristic would enhance the safety of the vehicle as well as the excitement of the driver.
- Regenerative braking ability and high energy efficiency. It is only the electric motor that can convert braking/deceleration energy into electricity and charge back to the storage system. Moreover, the global efficiencies of EVs are much higher than that of ICE vehicle, because of the very high efficiency of the motor itself and the absence of some mechanical parts, e.g., gearbox and clutch.
- Distributed traction motors. At the same power range, the electric motor is smaller in volume and simpler in structure than the ICE. This allows for every wheel of the vehicle to be driven by independent and separated motor or even in-wheel/wheel-hub motor, which integrates all of the power converter, brake, cooling system, and motor in one wheel. Such EVs are very flexible, powerful, and promisingly safe.
3.4. Vehicle Position Model
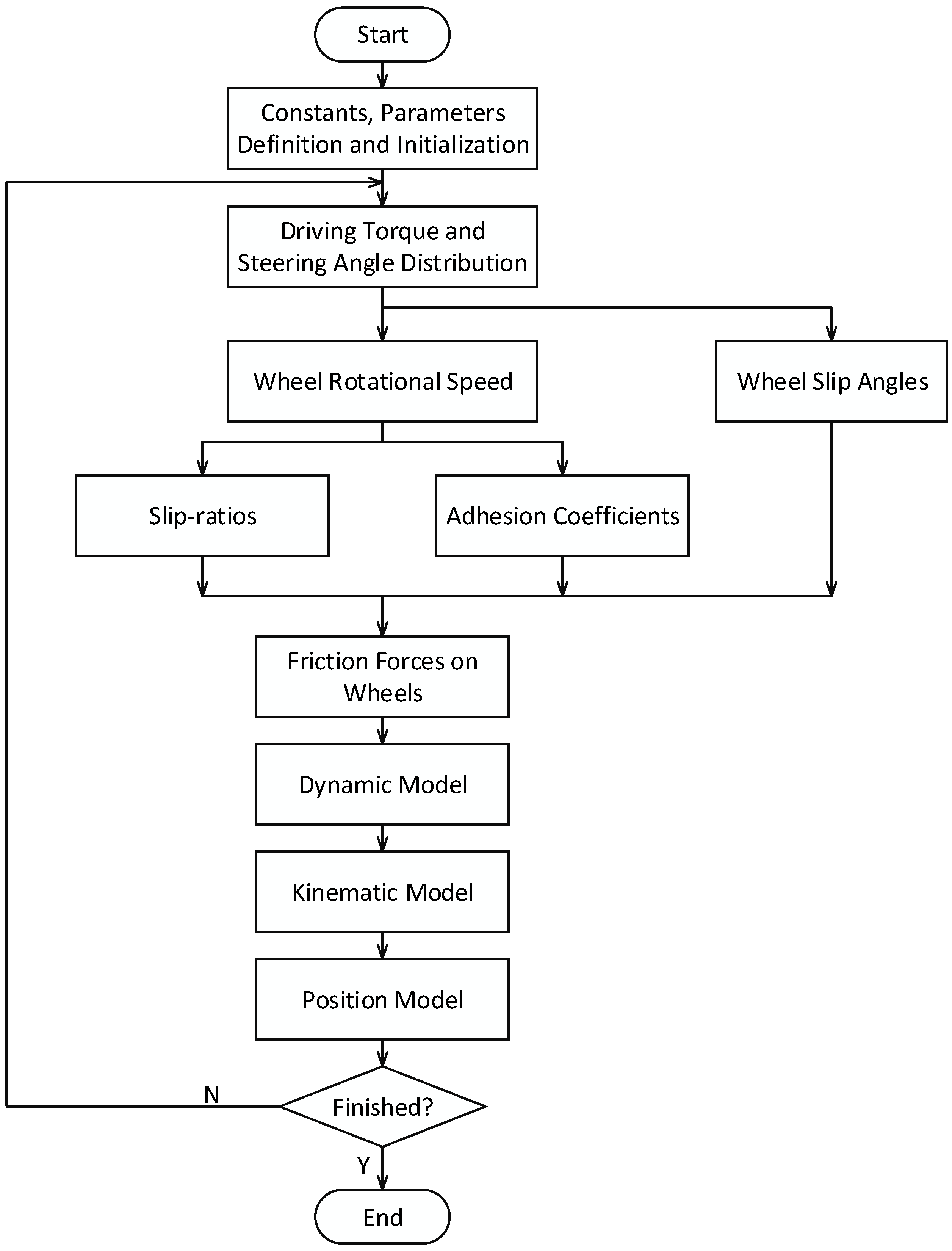
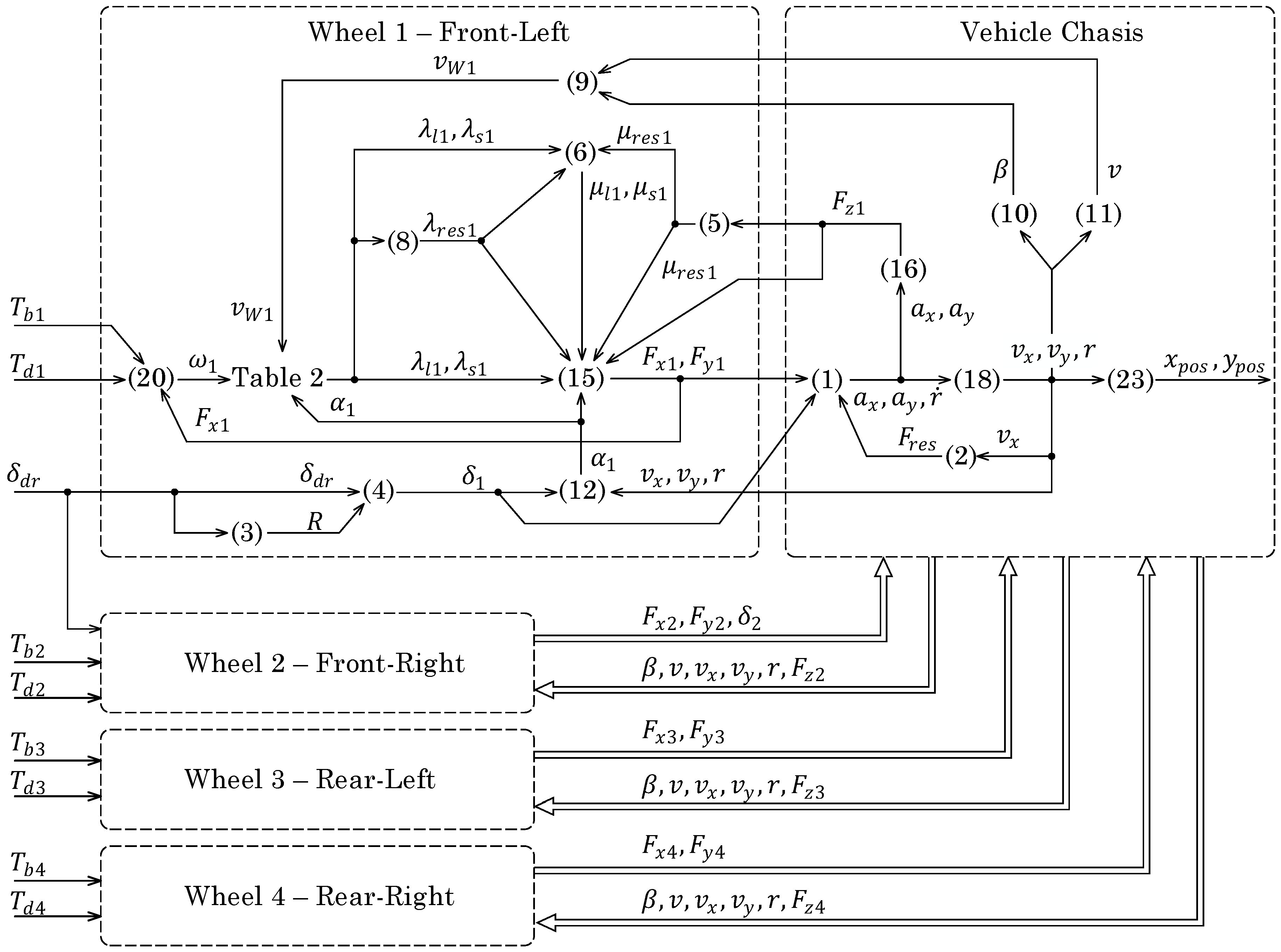
3.5. Mathematical Model Implementation Procedure
- For each equation in Figure 9, the input vectors indicate the required information for achieving the output vector, which is the result of that equation. Additionally, some equations that are the derivation of the final one may be omitted, i.e., only the most fundamental ones are shown in the flowchart.
- The calculation process is illustrated for one representative wheel, i.e., the front-left wheel, but it is identically applicable for other wheels.
- The flowchart consists of two main blocks, including the wheel model block and vehicle chassis one. The wheel block outputs the longitudinal and lateral forces, which are then incorporated with those of other wheel blocks at (1) to make the accelerations of the vehicle.
- As the front-wheel steering vehicle is mentioned as the studied object, only two steering angles at the front wheels are obtained and delivered to the vehicle chassis block. Therefore, both rear wheel blocks only generate friction forces.
- In order to avoid algebraic loop issues that are caused by the existence of recursive computation, the feedback signals, e.g., states of the vehicle, must be initialized.
4. Validation Results
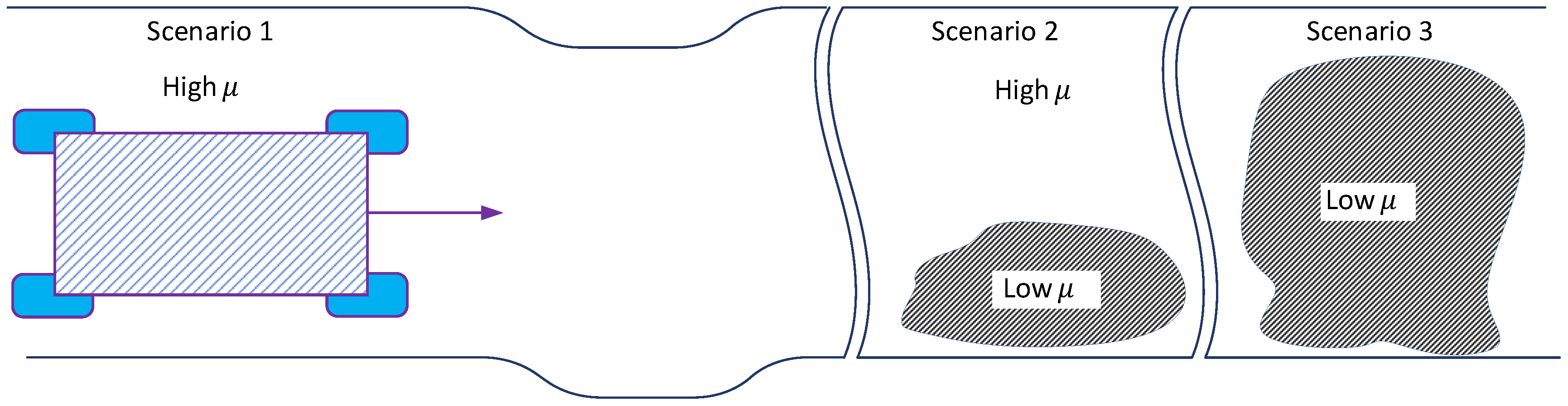
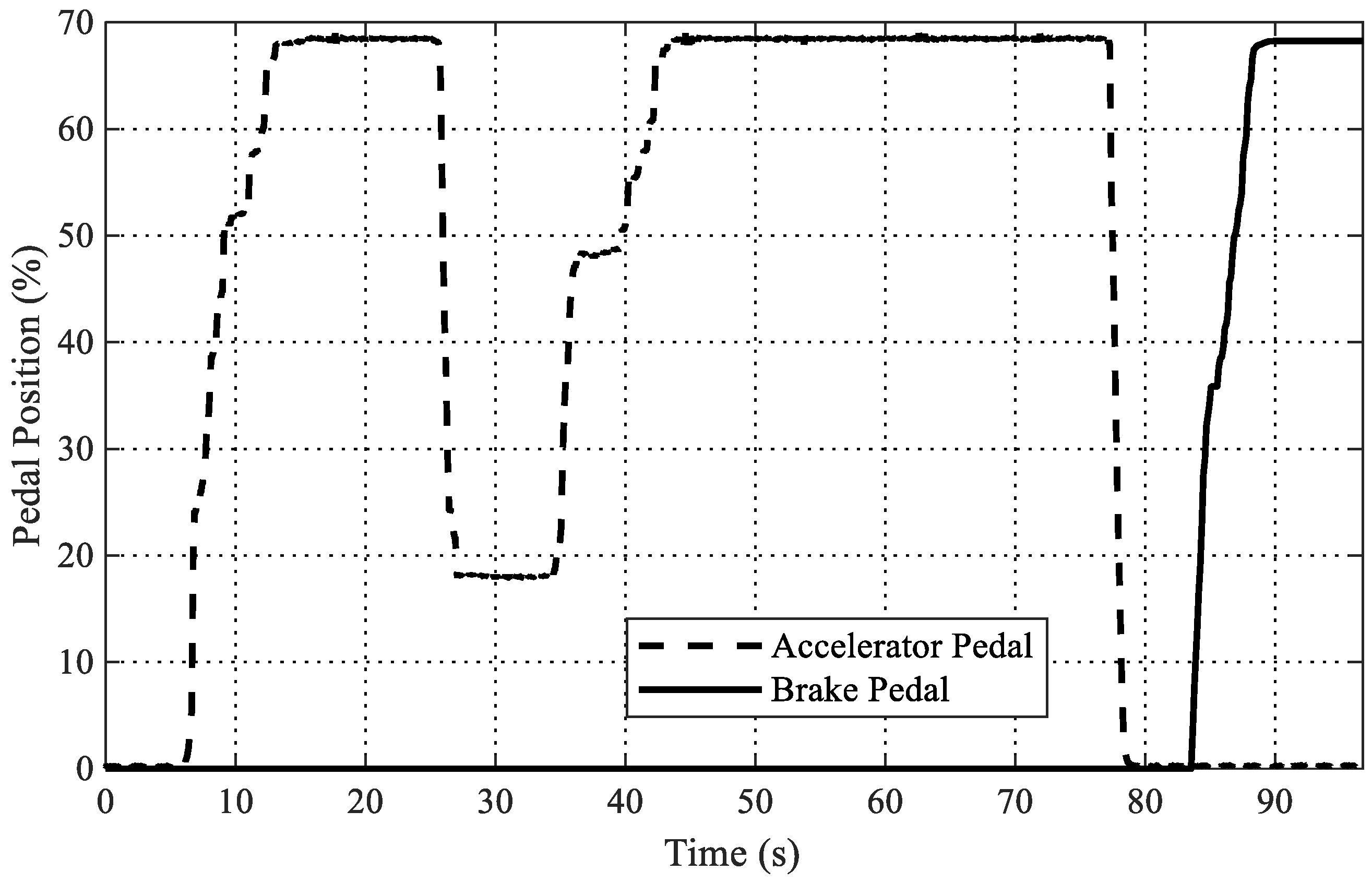
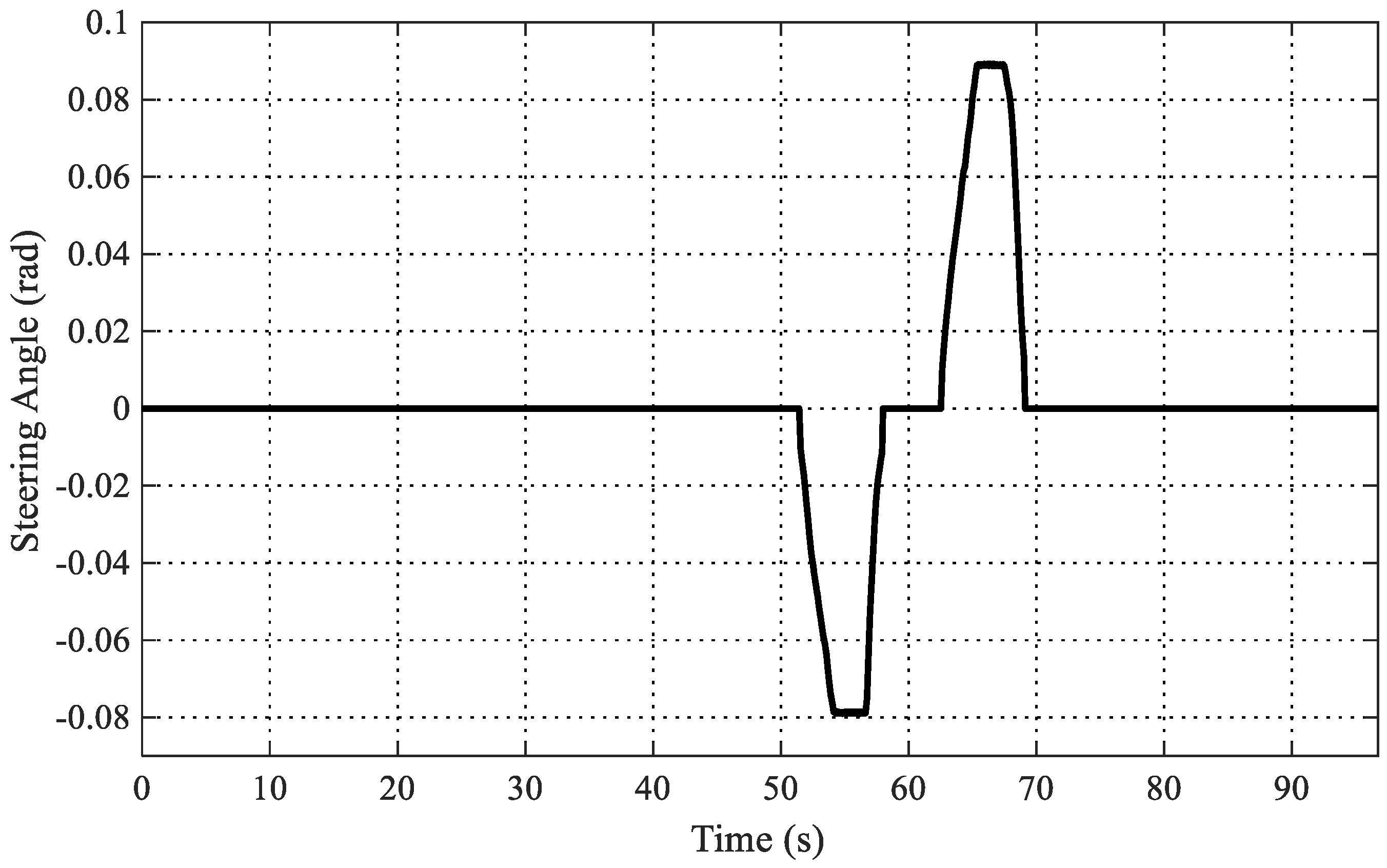
4.1. Testing Scenarios
4.2. Experimental Results
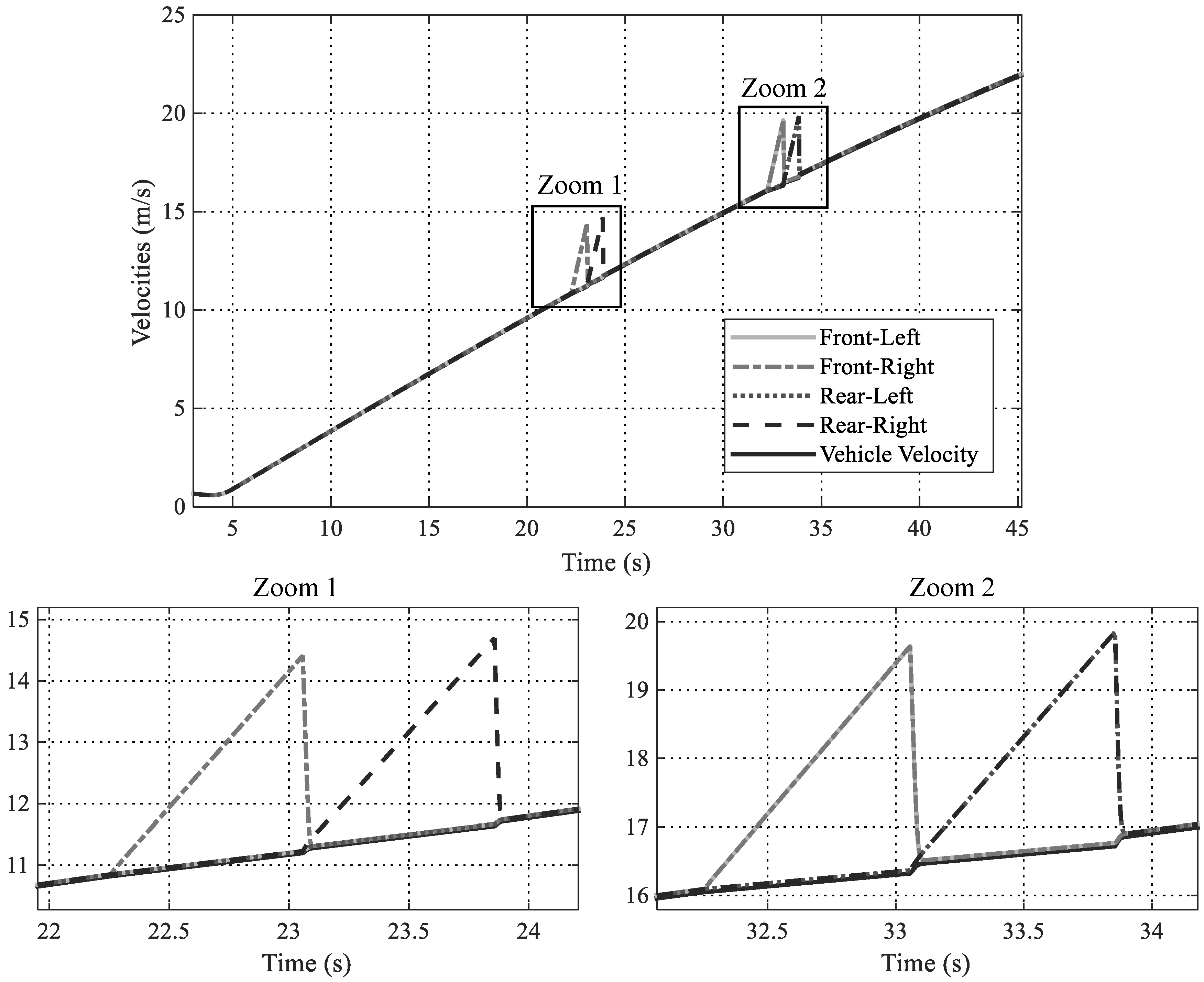
4.2.1. Scenario 1 Results
4.2.2. Scenario 2 and 3 Results
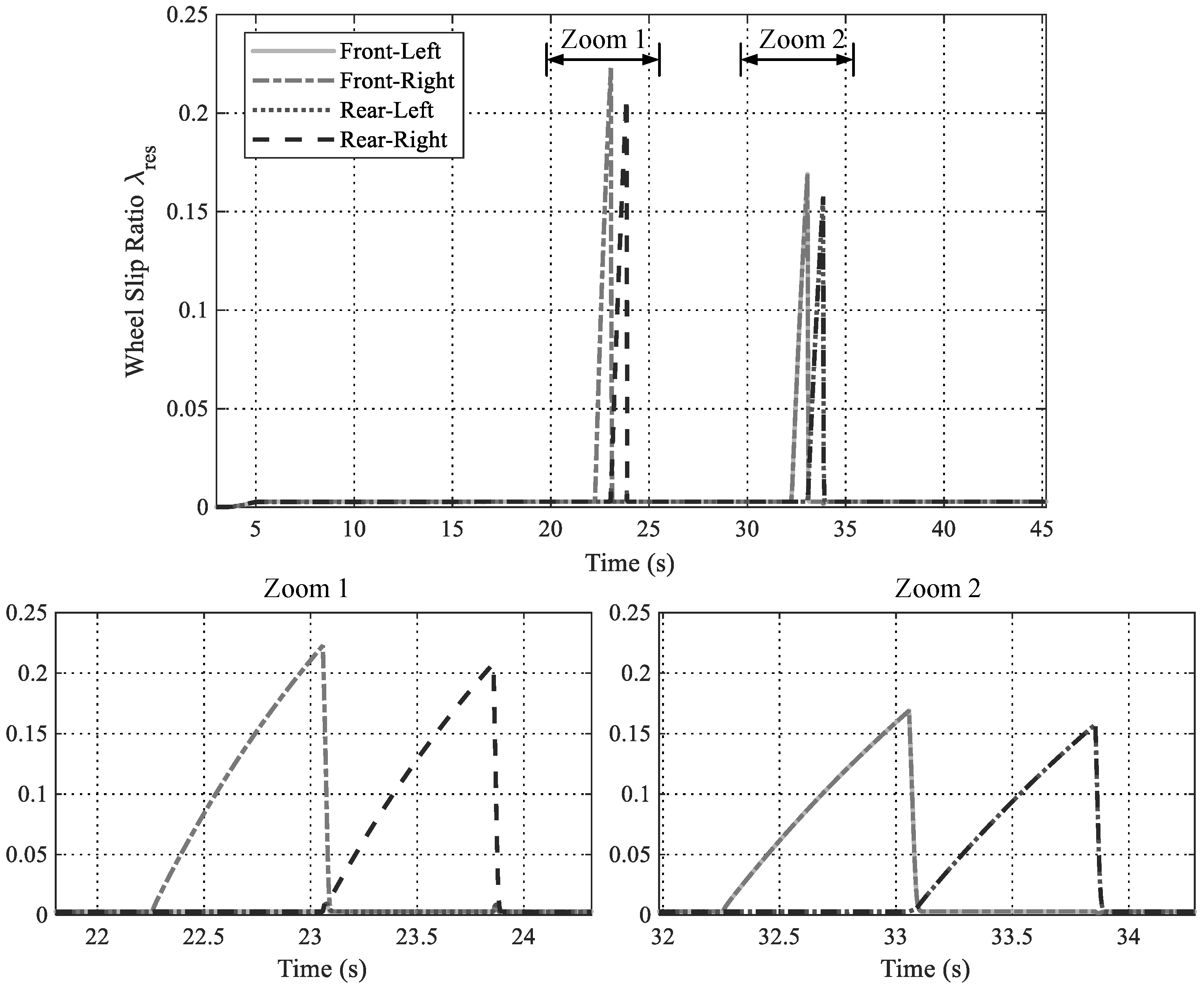
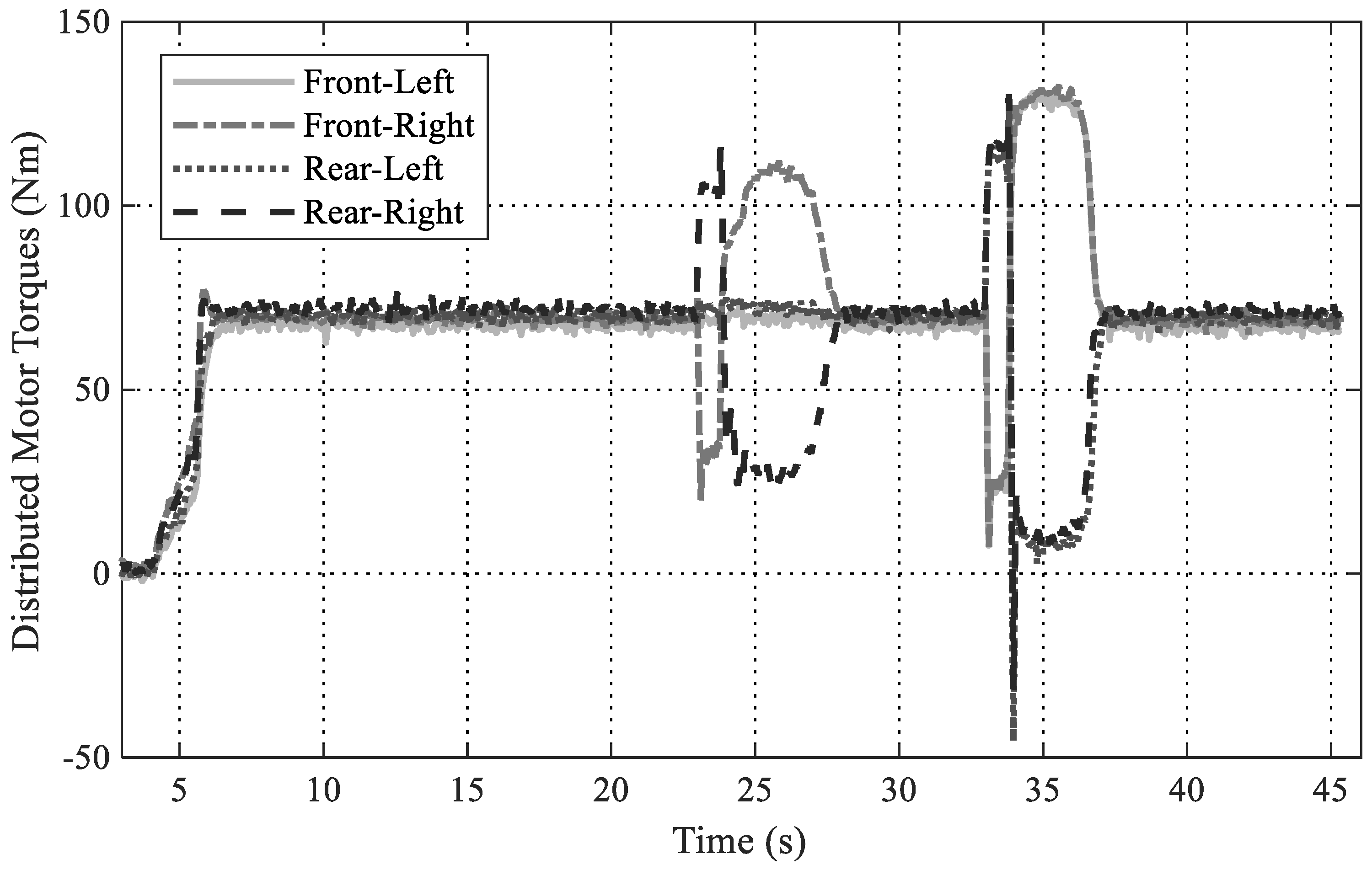
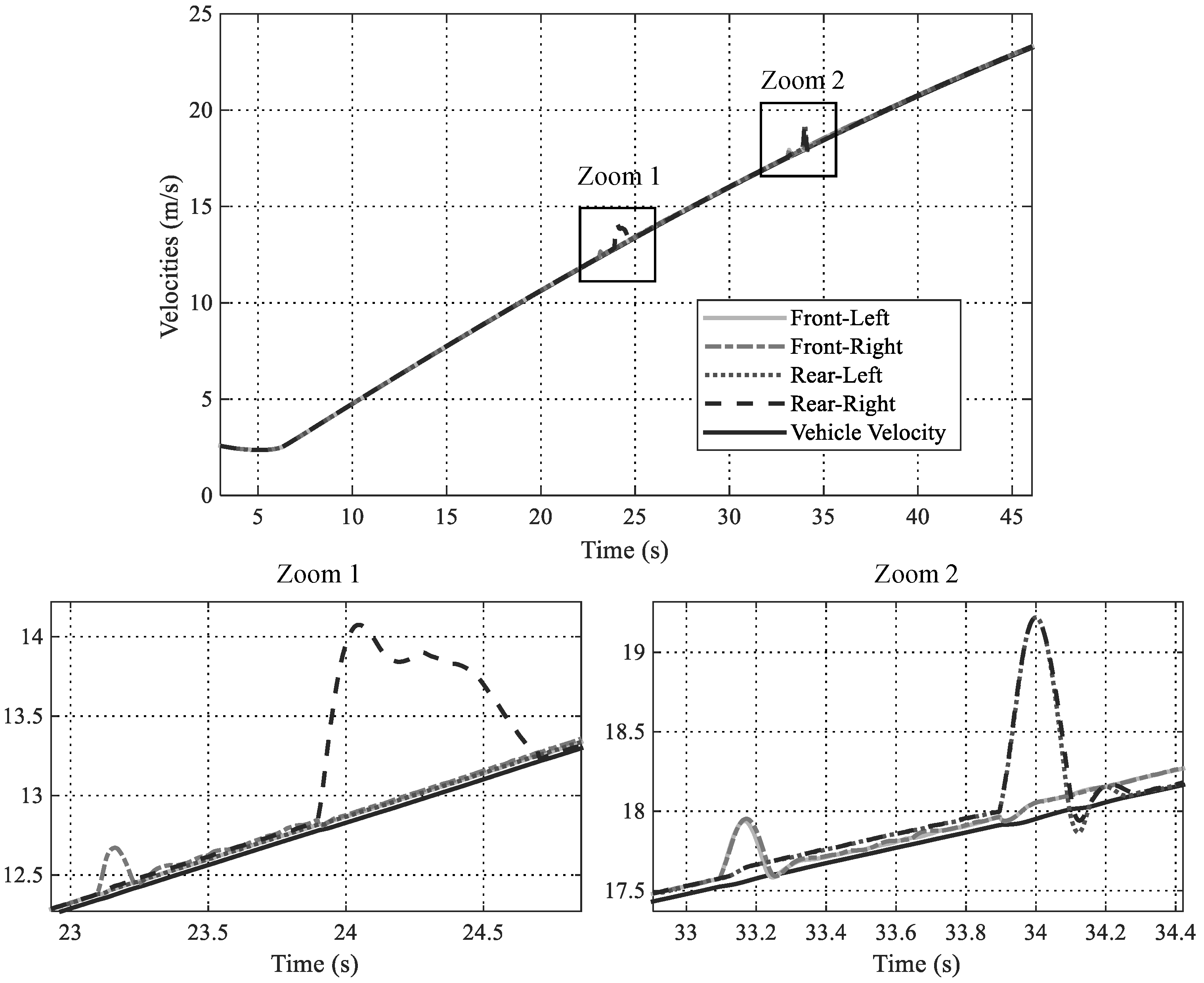
5. Application Example Using the Proposed HIL Simulation System
5.1. Control System Configuration
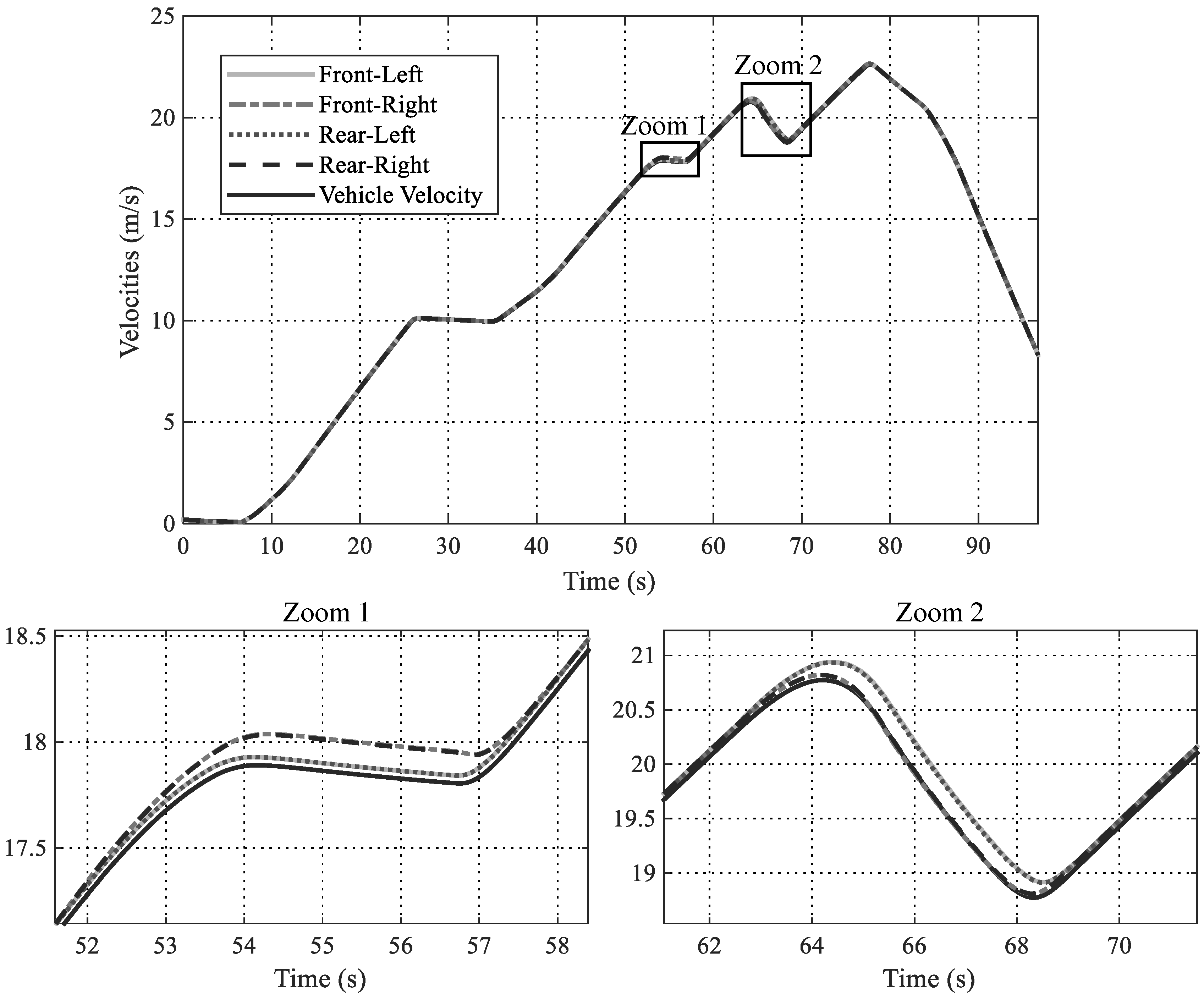
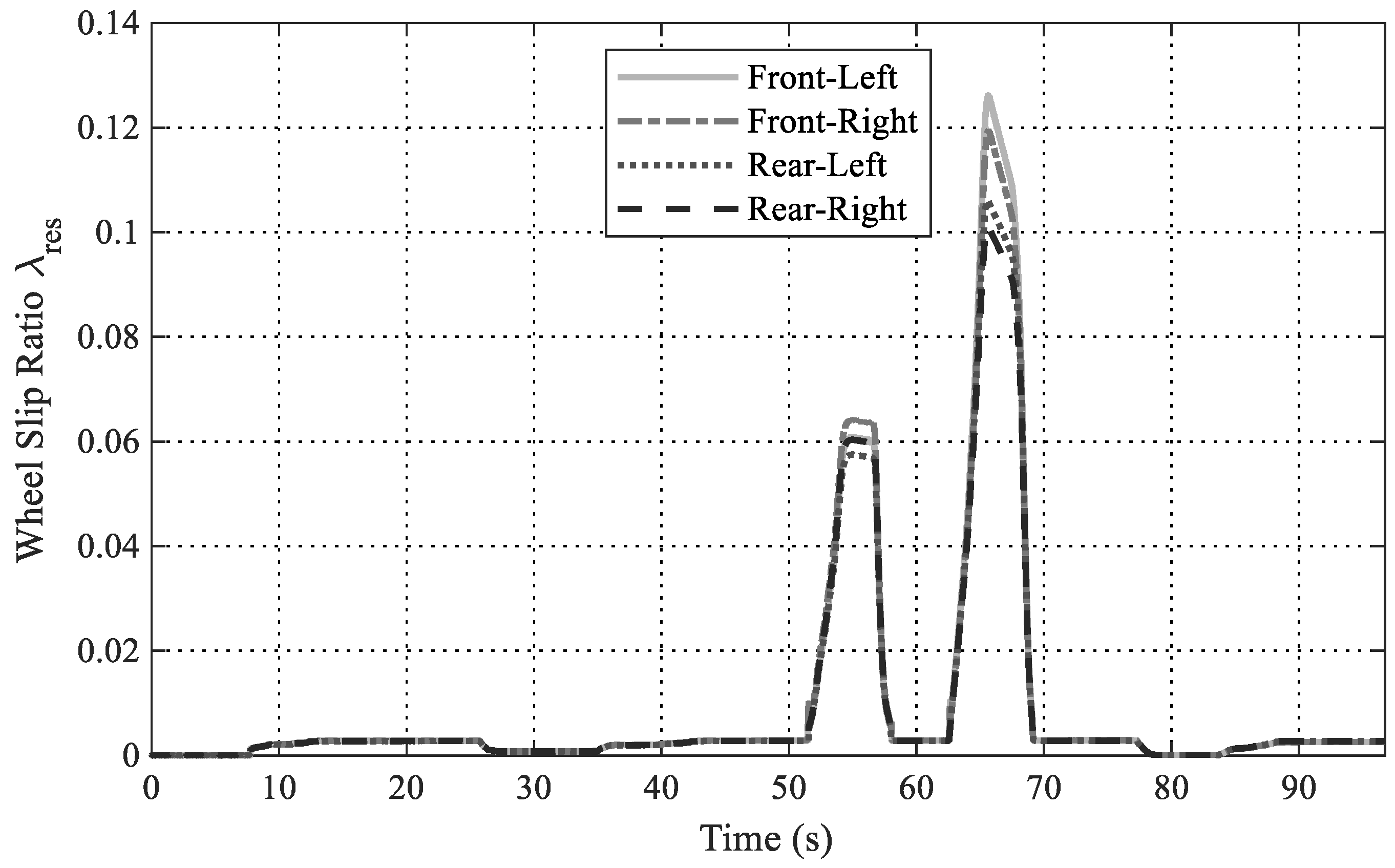
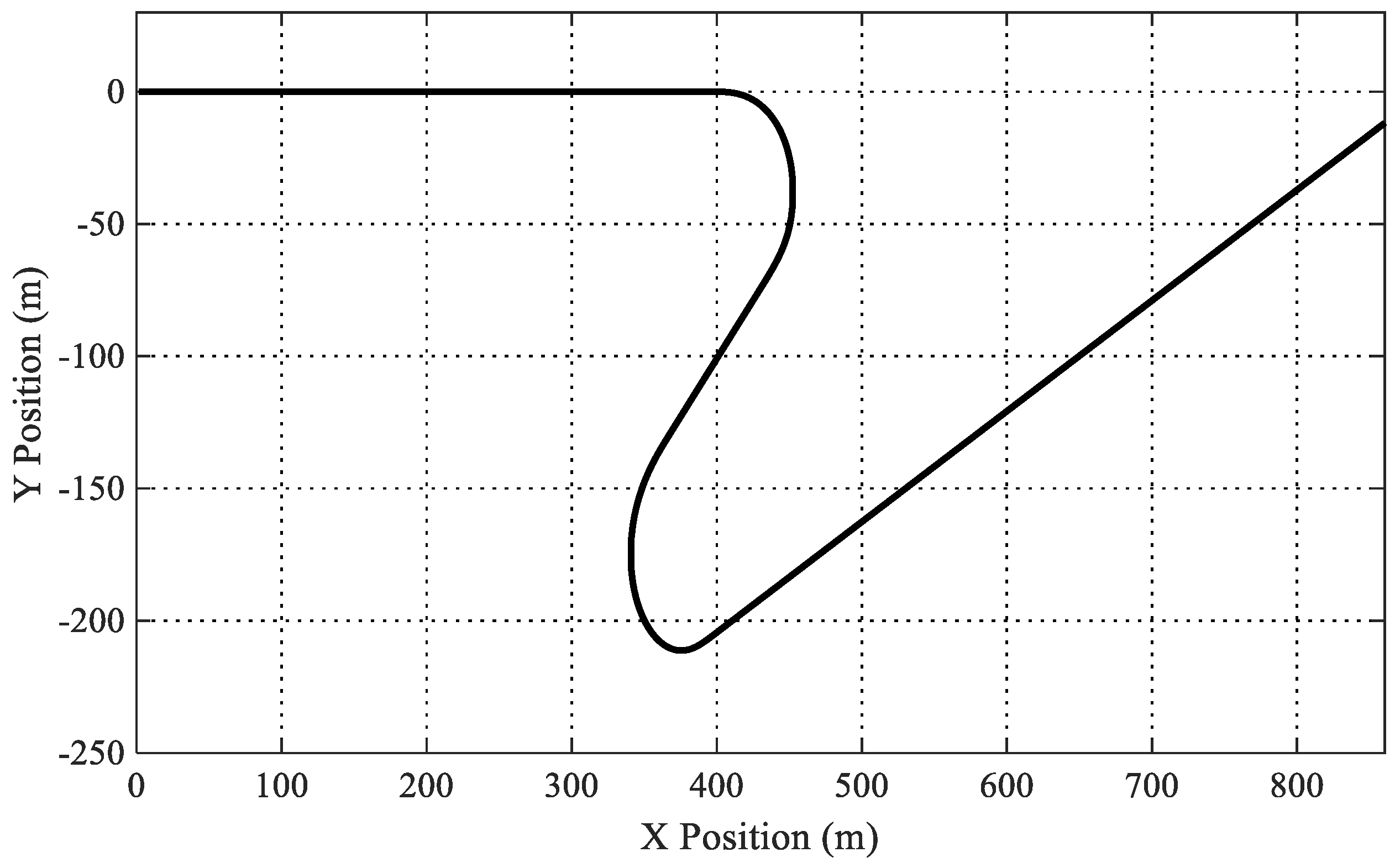
5.2. Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Weiss, M.; Cloos, K.C.; Helmers, E. Energy efficiency trade-offs in small to large electric vehicles. Environ. Sci. Eur. 2020, 32. [Google Scholar] [CrossRef]
- Helmers, E.; Marx, P. Electric cars: Technical characteristics and environmental impacts. Environ. Sci. Eur. 2012, 24, 1–15. [Google Scholar] [CrossRef]
- Karki, A.; Phuyal, S.; Tuladhar, D.; Basnet, S.; Shrestha, B.P. Status of Pure Electric Vehicle Power Train Technology and Future Prospects. Appl. Syst. Innov. 2020, 3, 35. [Google Scholar] [CrossRef]
- Yamamoto, M.; Kakisaka, T.; Imaoka, J. Technical trend of power electronics systems for automotive applications. Jpn. J. Appl. Phys. 2020, 59. [Google Scholar] [CrossRef]
- Chau, K.T. Electric Vehicle Machine and Drives—Design, Analysis and Application; John Wiley & Sons: Singapore, 2015. [Google Scholar]
- Hori, Y. Motion control of electric vehicles and prospects of supercapacitors. IEEJ Trans. Electr. Electron. Eng. 2009, 4, 231–239. [Google Scholar] [CrossRef]
- Hussain, S.; Ahmed, M.A.; Kim, Y.C. Efficient Power Management Algorithm Based on Fuzzy Logic Inference for Electric Vehicles Parking Lot. IEEE Access 2019, 7, 65467–65485. [Google Scholar] [CrossRef]
- Balaska, H.; Ladaci, S.; Schulte, H.; Djouambi, A. Adaptive cruise control system for an electric vehicle using a fractional order model reference adaptive strategy. IFAC-PapersOnLine 2019, 52, 194–199. [Google Scholar] [CrossRef]
- Ivanov, V.; Savitski, D.; Shyrokau, B. A Survey of Traction Control and Antilock Braking Systems of Full Electric Vehicles with Individually Controlled Electric Motors. IEEE Trans. Veh. Technol. 2015, 64, 3878–3896. [Google Scholar] [CrossRef]
- He, H.; Peng, J.; Xiong, R.; Fan, H. An acceleration slip regulation strategy for four-wheel drive electric vehicles based on sliding mode control. Energies 2014, 7, 3748–3763. [Google Scholar] [CrossRef]
- Lin, C.; Xu, Z. Wheel torque distribution of four-wheel-drive electric vehicles based on multi-objective optimization. Energies 2015, 8, 3815–3831. [Google Scholar] [CrossRef]
- Tian, J.; Tong, J.; Luo, S. Differential Steering Control of Four-Wheel Independent-Drive Electric Vehicles. Energies 2018, 11, 2892. [Google Scholar] [CrossRef]
- Park, J.; Jang, I.G.; Hwang, S.H. Torque distribution algorithm for an independently driven electric vehicle using a fuzzy control method: Driving stability and efficiency. Energies 2018, 11, 3479. [Google Scholar] [CrossRef]
- Thanh, V.D.; Ta, C.M. A Universal Dynamic and Kinematic Model of Vehicles. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Baek, S.Y.; Kim, Y.S.; Kim, W.S.; Baek, S.M.; Kim, Y.J. Development and Verification of a Simulation Model for 120 kW Class Electric AWD (All-Wheel-Drive) Tractor during Driving Operation. Energies 2020, 3, 2422. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Lombardi, N.; Guida, D. A model-based system engineering approach for the virtual prototyping of an electric vehicle of class l7. Eng. Lett. 2020, 28, 215–234. [Google Scholar]
- Mechanical Simulation. Introduction to CarSim. Available online: https://www.carsim.com/downloads/pdf/ (accessed on 31 October 2020).
- TESIS-DYNAware. veDYNA Entry—The Perfect Entry Point to Vehicle Dynamics Simulation. Available online: https://www.tesis-dynaware.com/ (accessed on 31 October 2020).
- Bouscayrol, A. Hardware-in-the-loop simulation. In Industrial Electronics Handbook, 2nd ed.; Taylor and Francis: Chicago, IL, USA, 2011; Chapter M35. [Google Scholar]
- Messier, P.; Nguyễn, B.H.; LeBel, F.A.; Trovão, J.P.F. Disturbance observer-based state-of-charge estimation for Li-ion battery used in light electric vehicles. J. Energy Storage 2020, 27, 101144. [Google Scholar] [CrossRef]
- Kermani, S.; Trigui, R.; Delprat, S.; Jeanneret, B.; Guerra, T.M. PHIL implementation of energy management optimization for a parallel HEV on a predefined route. IEEE Trans. Veh. Technol. 2011, 60, 782–792. [Google Scholar] [CrossRef]
- Nguyen, B.H.; German, R.; Trovao, J.P.F.; Bouscayrol, A. Real-time energy management of battery/supercapacitor electric vehicles based on an adaptation of pontryagin’s minimum principle. IEEE Trans. Veh. Technol. 2019, 68, 203–212. [Google Scholar] [CrossRef]
- Mayet, C.; Delarue, P.; Bouscayrol, A.; Chattot, E. Hardware-In-the-Loop Simulation of Traction Power Supply for Power Flows Analysis of Multitrain Subway Lines. IEEE Trans. Veh. Technol. 2017, 66, 5564–5571. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, J.; Li, Y.; Li, C. A Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop Tests. IEEE Trans. Veh. Technol. 2018, 67, 11440–11452. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Y.; Yin, C. Hardware-in-the-Loop Simulation of Robust Mode Transition Control for a Series-Parallel Hybrid Electric Vehicle. IEEE Trans. Veh. Technol. 2016, 65, 1059–1069. [Google Scholar] [CrossRef]
- Reitinger, J.; Balda, P.; Schlegel, M. Steam turbine hardware in the loop simulation. In Proceedings of the 2017 21st International Conference on Process Control, PC 2017, Štrbské Pleso, Slovakia, 6–9 June 2017; pp. 380–385. [Google Scholar] [CrossRef]
- Yang, J.; Konno, A.; Abiko, S.; Uchiyama, M. Hardware-in-the-loop simulation of massive-payload manipulation on orbit. Robomech J. 2018, 5. [Google Scholar] [CrossRef]
- Wu, J.; Cheng, Y.; Srivastava, A.K.; Schulz, N.N.; Ginn, H.L. Hardware in the Loop test for power system modeling and simulation. In Proceedings of the 2006 IEEE PES Power Systems Conference and Exposition, PSCE 2006, Atlanta, GA, USA, 29 October–1 November 2006; pp. 1892–1897. [Google Scholar] [CrossRef]
- Magalhães, Z.; Murilo, A.; Lopes, R.V. Development and evaluation with MIL and HIL simulations of a LQR-based upper-level electronic stability control. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 327. [Google Scholar] [CrossRef]
- Vo-Duy, T.; Ta, M.C. A signal hardware-in-the-loop model for electric vehicles. Robomech J. 2016, 3, 29. [Google Scholar] [CrossRef]
- Nie, P.; Wu, Y.; Liang, X. Design of HIL Test System for VCU of Pure Electric Vehicle. In Proceedings of the 2017 2nd International Conference on Materials Science, Machinery and Energy Engineering (MSMEE 2017), Dalian, China, 13–14 May 2017; Volume 123, pp. 867–871. [Google Scholar] [CrossRef]
- Xia, J.L.; Diao, Q.; Sun, W.; Xing, Z.; Yuan, X.; Dong, T. Development of low cost hardware-in-the-loop test system and a case study for electric vehicle controller. In Proceedings of the 2016 International Conference on Applied System Innovation, (ICASI), Okinawa, Japan, 26–30 May 2016; pp. 4–7. [Google Scholar] [CrossRef]
- Ramaswamy, D.; McGee, R.; Sivashankar, S.; Deshpande, A.; Allen, J.; Rzemien, K.; Stuart, W. A Case Study in Hardware-In-The-Loop Testing: Development of An ECU for a Hybrid Electric Vehicle; SAE Technical Papers; SAE International: Warrendale, PA, USA, 2004. [Google Scholar] [CrossRef]
- Yan, Y.; Liu, C.; Ma, X.; Zhang, Y. Hardware-in-loop real-time simulation of electrical vehicle using multi-simulation platform based on data fusion approach. Int. J. Distrib. Sens. Netw. 2019, 15. [Google Scholar] [CrossRef]
- Nam, K.H. AC Motor Control and Electrical Vehicle Applications, 2nd ed.; Taylor & Francis: Boca Raton, FL, USA, 2019. [Google Scholar]
- Kiencke, U.; Nielsen, L. Automotive Control System; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Pacejka, H.B. Tire and Vehicle Dynamics, 3rd ed.; Butterworth-Heinemann: Oxford, UK, 2012. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Springer: New York, NY, USA, 2012. [Google Scholar]
- Jazar, R.N. Vehicle Dynamics: Theory and Application; Springer: New York, NY, USA, 2009. [Google Scholar]
- Wang, Y.; Fujimoto, H.; Hara, S. Driving Force Distribution and Control for EV With Four In-Wheel Motors: A Case Study of Acceleration on Split-Friction Surfaces. IEEE Trans. Ind. Electron. 2017, 64, 3380–3388. [Google Scholar] [CrossRef]
- Maeda, K.; Fujimoto, H.; Hori, Y. Four-wheel driving-force distribution method based on driving stiffness and slip ratio estimation for electric vehicle with in-wheel motors. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, VPPC 2012, Seoul, Korea, 9–12 October 2012; pp. 1286–1291. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Road | |||||
|---|---|---|---|---|---|
| Dry asphalt | 1.2801 | 23.99 | 0.52 | 0.002–0.004 | 0.00015 |
| Wet asphalt | 0.857 | 33.822 | 0.347 | ||
| Dry concrete | 1.1973 | 25.168 | 0.5373 | ||
| Dry cobblestone | 1.3713 | 6.4565 | 0.6691 | ||
| Wet cobblestone | 0.4004 | 33.7080 | 0.12.4 | ||
| Snow | 0.1946 | 94.129 | 0.0646 | ||
| Ice | 0.05 | 306.39 | 0 |
| Slip-Ratio | Braking () | Accelerating () |
|---|---|---|
| Parameters | Value | Unit |
|---|---|---|
| l | 2550 | mm |
| 1199 | mm | |
| 1351 | mm | |
| 1475 | mm | |
| 1475 | mm | |
| h | 559 | mm |
| 300 | mm | |
| 900 | kgm | |
| 2 | kgm | |
| 0.29 | - | |
| A | 2.49 | m |
| 1.2041 | kg/m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vo-Duy, T.; Ta, M.C.; Nguyễn, B.-H.; Trovão, J.P.F. Experimental Platform for Evaluation of On-Board Real-Time Motion Controllers for Electric Vehicles. Energies 2020, 13, 6448. https://doi.org/10.3390/en13236448
Vo-Duy T, Ta MC, Nguyễn B-H, Trovão JPF. Experimental Platform for Evaluation of On-Board Real-Time Motion Controllers for Electric Vehicles. Energies. 2020; 13(23):6448. https://doi.org/10.3390/en13236448
Chicago/Turabian StyleVo-Duy, Thanh, Minh C. Ta, Bảo-Huy Nguyễn, and João Pedro F. Trovão. 2020. "Experimental Platform for Evaluation of On-Board Real-Time Motion Controllers for Electric Vehicles" Energies 13, no. 23: 6448. https://doi.org/10.3390/en13236448
APA StyleVo-Duy, T., Ta, M. C., Nguyễn, B.-H., & Trovão, J. P. F. (2020). Experimental Platform for Evaluation of On-Board Real-Time Motion Controllers for Electric Vehicles. Energies, 13(23), 6448. https://doi.org/10.3390/en13236448