Testing the Accuracy of the Modified ICP Algorithm with Multimodal Weighting Factors




Abstract
1. Introduction
- the application of fixed weightings of pairs (the standard approach)—each pair has an equal impact on the rotation and translation parameters;
- the weight of a pair determined as the products of norms [21];
- weighting of the pairs of points in the same colour [18];
- weighting of points determined as a projection of sensor errors on the surface being scanned [21].
2. ICP Algorithm
- Sample selection—the selection of points in both clouds which, according to specified criteria, will be suitable for further matching, e.g., the use of all available points, or those with the highest reflection intensity;
- Matching—the selection of points from both clouds and arranging them into pairs i.e., assigning the i-th point from the scan to the i-th point from the scan , taking into account that [25]:where:—i-th point from scan (vector of coordinates);—j-th point from scan (vector of coordiantes).
- Pair weighting—assigning an appropriate hierarchy to the previously matched pairs, based on the previously assumed criterion (the study adopted the criterion based on one of three types of measures of the error of a point’s position coordinates);
- Rejecting, i.e., damping the influence of outlying pairs—at this stage, the algorithm either rejects or reduces the influence of individual point pairs on the scan matching process, based on the adopted robust function;
- Assigning an error metric—the selection of an error metric type appropriate for the case under consideration. In this article, the “point-to-point” metric was used.
- Minimalisation of error metric—the minimalisation of the objective function until the convergence criterion or other final condition is achieved, taking into account that the error cumulative sum E amounts to [25]:in this article, the authors employed the SVD (Singular Value Decomposition) method for the minimalisation of Function (2). It is described in more detail in [22,26,27].
3. Sources of ICP Inaccuracies
- Sensor bias—the measured points share a common error resulting from the temperature-drift effect, laser beam stability [32], characteristics of the object under observation (its transparency, colour, material roughness, etc.) [31], the beam width [33], or incorrect calibration of the mapping sensor [34].
- Random characteristics of the ICP algorithm model—in the process of finding the global minimum of the objective function, the algorithm takes into account many random factors, e.g., a random decrease in the number of points in the cloud, in order to improve the effectiveness of calculations, data filtration processes [37], etc.
4. Multimodal Weighting Factors Based on the Sensor Error Model
- —the angle between positional lines,
- —the value of the mean error of the angle measurement ,
- —the value of the mean error of the distance measurement r,
- r—the distance (euclidean metric) from the sensor to the environmental obstacle or an object (measured),
- a—the length (euclidean metric) of the longer semi-axis of the mean error ellipse,
- b—the length (euclidean metric) of the shorter semi-axis of the mean error ellipse.
- —is the angle between the a and b axes of the error ellipse,
- —is the mean error of the x coordinate,
- —is the mean error of the y coordinate,
- —is the cross-corelation between coordinates x and y.
Multimodal Weighting Factors
| Algorithm 1: The pseudocode of the modified ICP algorithm with the used weighting factors . |
 |
5. Experimental Results and Methods
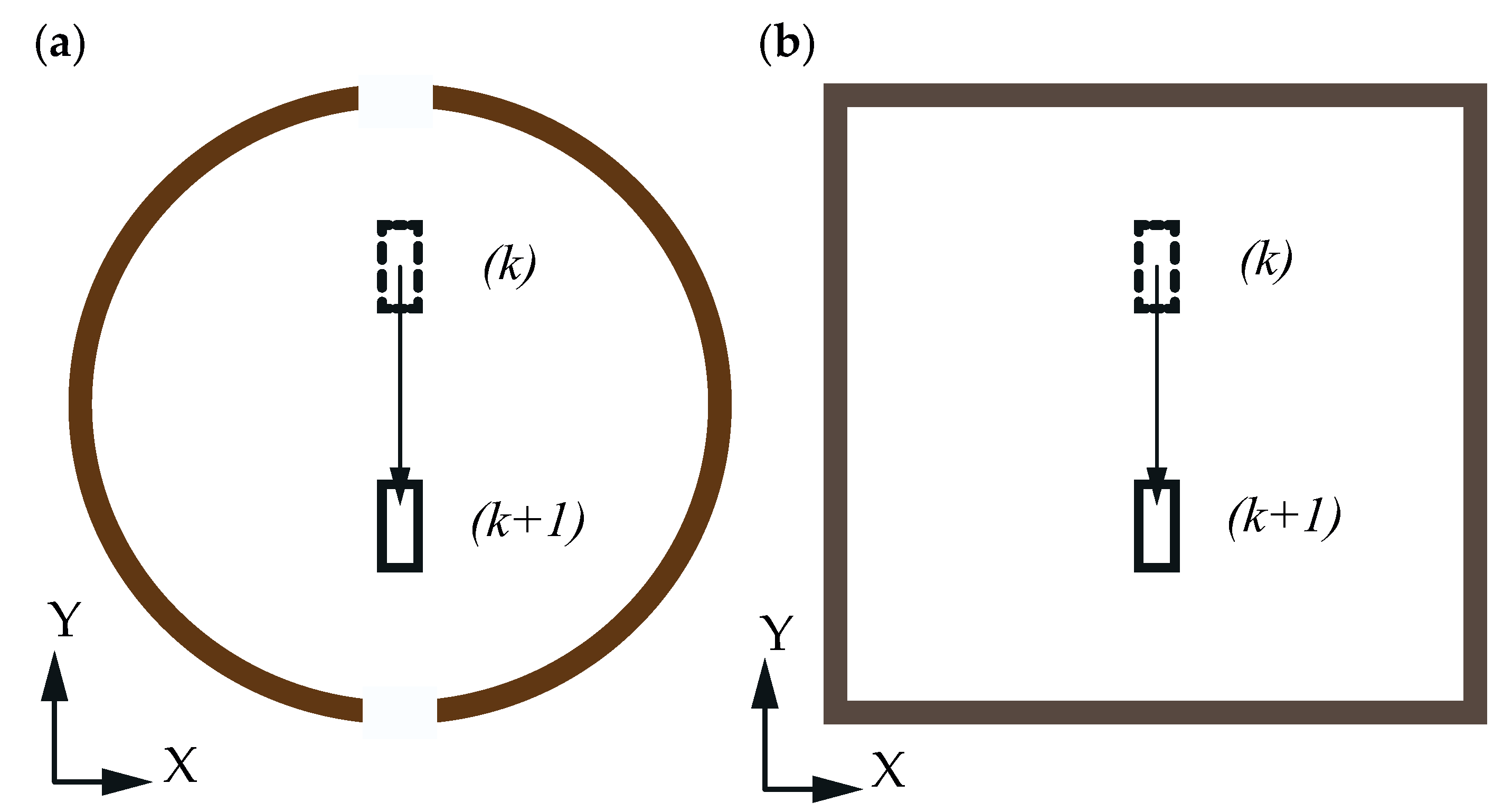
- USV was moving rectilinearly along the N(Y) axis while changing its position step-wise by 1 m within the area whose walls were square or circular in shape.
- The scanning device produced and recorded two sets of environment scans. The first at the vehicle’s position at the moment . The second at the vehicle’s position at the moment .
- The number of points in subsequent scans from the sets and was increased by 1, starting from 100 points (, ) and ending after having achieved 1000 points (, ). A change in the number of points in the scan was aimed at the simulation, i.e., a change in the angle resolution of the measurement.
- The scan pairs from the sets and (e.g., and ), corresponding to one another in terms of the number of points, were matched to one another by the standard algorithm, the ICP algorithm—, and algorithms based on introduced coefficients—, , . Scans from the set were regarded as reference ones.
- Points in the sets and were determined for the walls of figures based on the pairs of measurements of the distances r and the direction from the vehicles’s position at the moment and at the moment . In order to make the simulation more realistic, the corrections , , where , were added to the measurements r and .
- The simulation was carried out 150 times for each of the variants illustrated in Figure 4 for a particular sample size per scan (e.g., 150 times for the scans and …, 150 times for and , etc.).
- The condition which ended the iterations of ICP algorithm was the assumption that (the equation is presented in line 18 of Algorithm 1).
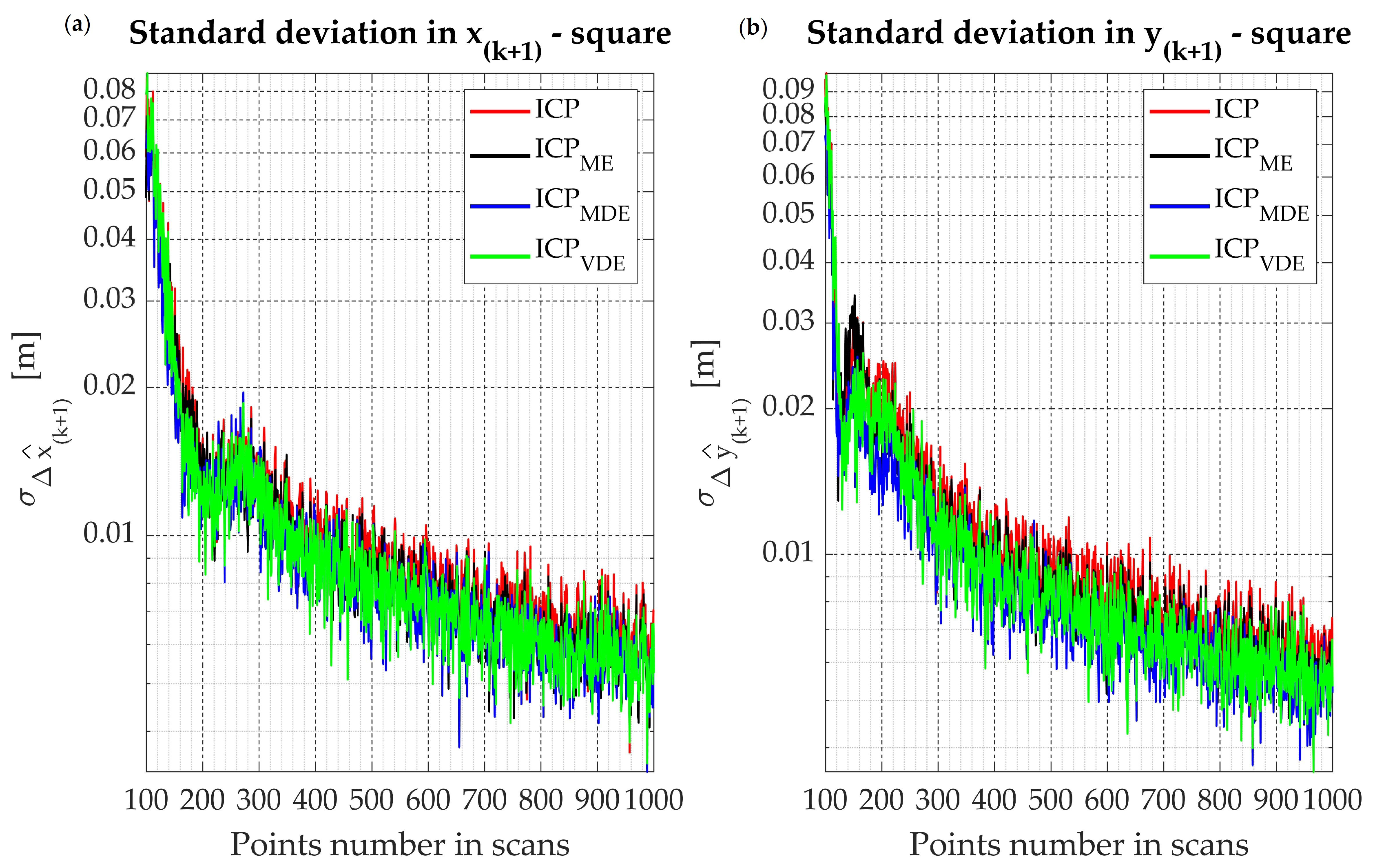
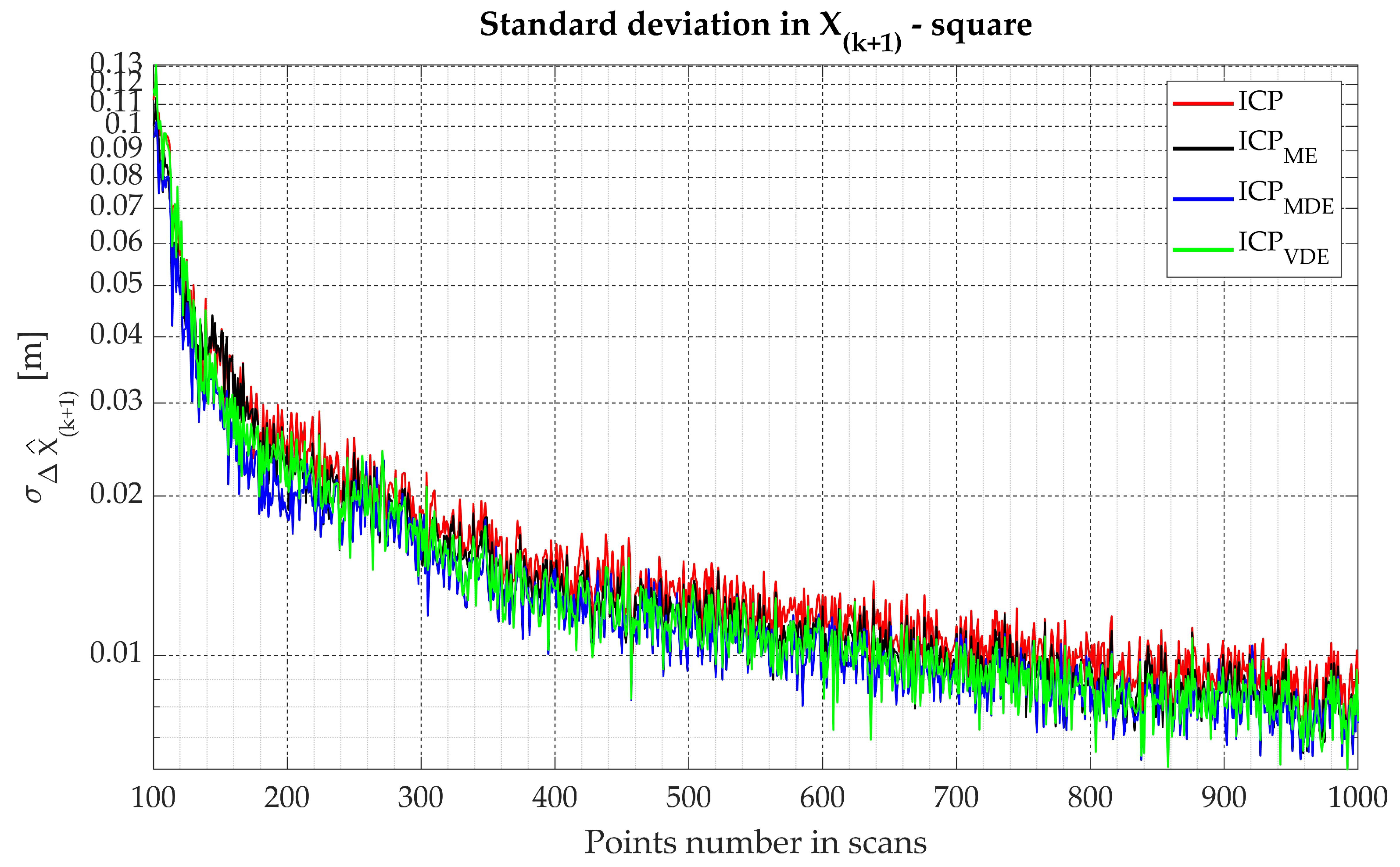
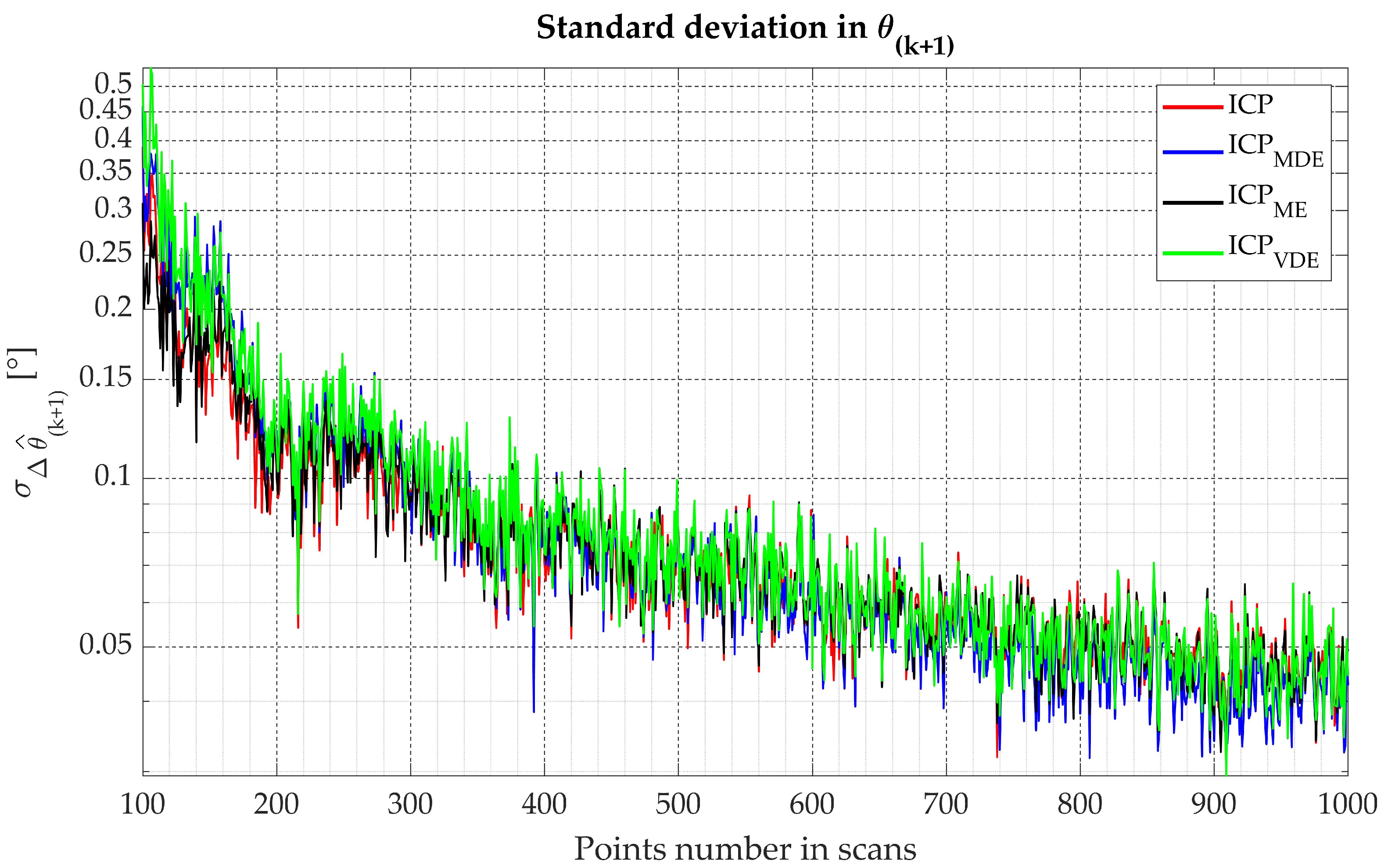
5.1. Results—Translation and Rotation Accuracy in a Square-Shaped Area
5.2. Results—Translation and Rotation Accuracy in a Circular-Shaped Area
5.3. Results—Summary
5.4. Results—RMS Alignment Error
6. Conclusions and Further Work
Author Contributions
Funding
Conflicts of Interest
References
- Nieto, J.; Bailey, T.; Nebot, E. Scan-SLAM: Combining EKF-SLAM and Scan Correlation. In Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2006; pp. 167–178. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-time. In Proceedings of the Robotics: Science and Systems X Conference, Berkeley, CA, USA, 12–16 July 2014. [Google Scholar] [CrossRef]
- Besl, P.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Ezra, E.; Sharir, M.; Efrat, A. On the ICP algorithm. In Proceedings of the Twenty-Second Annual Symposium on Computational Geometry—SCG 06; ACM Press: New York, NY, USA, 2006. [Google Scholar] [CrossRef]
- Baek, S.; Gil, Y. Human Pose Estimation Using Articulated ICP. In Proceedings of the 2019 2nd International Conference on Control and Robot Technology; ACM: New York, NY, USA, 2019. [Google Scholar] [CrossRef]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A globally optimal solution to 3D ICP point-set registration. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2241–2254. [Google Scholar] [CrossRef] [PubMed]
- Diebel, J.; Reutersward, K.; Thrun, S.; Davis, J.; Gupta, R. Simultaneous localization and mapping with active stereo vision. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 September–2 October 2004; IEEE: New York, NY, USA, 2004. [Google Scholar] [CrossRef]
- Rowekamper, J.; Sprunk, C.; Tipaldi, G.D.; Stachniss, C.; Pfaff, P.; Burgard, W. On the position accuracy of mobile robot localization based on particle filters combined with scan matching. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; IEEE: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, M.; Chen, W. MIM_SLAM: A Multi-Level ICP Matching Method for Mobile Robot in Large-Scale and Sparse Scenes. Appl. Sci. 2018, 8, 2432. [Google Scholar] [CrossRef]
- Jiang, G.; Yin, L.; Liu, G.; Xi, W.; Ou, Y. FFT-Based Scan-Matching for SLAM Applications with Low-Cost Laser Range Finders. Appl. Sci. 2018, 9, 41. [Google Scholar] [CrossRef]
- Lenac, K.; Cuzzocrea, A.; Mumolo, E. An effective and efficient hybrid scan matching algorithm for mobile object applications. In Proceedings of the Symposium on Applied Computing—SAC 17; ACM Press: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Zhu, Q.; Wu, J.; Hu, H.; Xiao, C.; Chen, W. LIDAR Point Cloud Registration for Sensing and Reconstruction of Unstructured Terrain. Appl. Sci. 2018, 8, 2318. [Google Scholar] [CrossRef]
- Olson, E.B. Robust and Efficient Robotic Mapping. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2008. [Google Scholar]
- Rofer, T. Using histogram correlation to create consistent laser scan maps. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and System, Lausanne, Switzerland, 30 September–4 October 2002; IEEE: New York, NY, USA, 2002. [Google Scholar] [CrossRef]
- Konecny, J.; Prauzek, M.; Kromer, P.; Musilek, P. Novel Point-to-Point Scan Matching Algorithm Based on Cross-Correlation. Mob. Inf. Syst. 2016, 2016, 1–11. [Google Scholar] [CrossRef]
- Zezhong, X.; Jilin, L.; Zhiyu, X. Scan matching based on CLS relationships. In Proceedings of the IEEE International Conference on Robotics, Intelligent Systems and Signal Processing, Changsha, China, 8–13 October 2003; IEEE: New York, NY, USA, 2003. [Google Scholar] [CrossRef]
- Zezhong, X.; Jilin, L.; Zhiyu, X. Map building and localization using 2D range scanner. In Proceedings of the 2003 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16–20 July 2020; IEEE: New York, NY, USA, 2003; Volume 2, pp. 848–853. [Google Scholar]
- Godin, G.; Rioux, M.; Baribeau, R. Three-dimensional registration using range and intensity information. In Videometrics III; El-Hakim, S.F., Ed.; SPIE: Boston, MA, USA, 1994. [Google Scholar] [CrossRef]
- Liu, B.; Gao, X.; Liu, H.; Wang, X.; Liang, B. A Fast Weighted Registration Method of 3D Point Cloud Based on Curvature Feature. In Proceedings of the 3rd International Conference on Multimedia and Image Processing—ICMIP 2018; ACM Press: New York, NY, USA, 2018. [Google Scholar] [CrossRef]
- Wang, R.; Geng, Z. WA-ICP algorithm for tackling ambiguous correspondence. In Proceedings of the 2015 3rd IAPR Asian Conference on Pattern Recognition (ACPR), Kuala Lumpur, Malaysia, 3–6 November 2015; IEEE: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, QC, Canada, 28 May–1 June 2001; IEEE: New York, NY, USA, 2001. [Google Scholar] [CrossRef]
- Naus, K.; Marchel, Ł. Use of a Weighted ICP Algorithm to Precisely Determine USV Movement Parameters. Appl. Sci. 2019, 9, 3530. [Google Scholar] [CrossRef]
- Censi, A. An accurate closed-form estimate of ICPs covariance. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; IEEE: New York, NY, USA, 2007. [Google Scholar]
- He, Y.; Liang, B.; Yang, J.; Li, S.; He, J. An Iterative Closest Points Algorithm for Registration of 3D Laser Scanner Point Clouds with Geometric Features. Sensors 2017, 17, 1862. [Google Scholar] [CrossRef] [PubMed]
- Bengtsson, O.; Albert-Jan, B. Robot localization based on scan-matching estimating the covariance matrix for the IDC algorithm. Robot. Auton. Syst. 2003, 44, 29–40. [Google Scholar] [CrossRef]
- Marden, S.; Guivant, J. Improving the Performance of ICP for Real-Time Applications using an Approximate Nearest Neighbour Search. In Proceedings of the Australasian Conference on Robotics and Automation, Wellington, New Zealand, 3–5 December 2012; pp. 3–5. [Google Scholar]
- Leal, N.; Zurek, E.; Leal, E. Non-Local SVD Denoising of MRI Based on Sparse Representations. Sensors 2020, 20, 1536. [Google Scholar] [CrossRef] [PubMed]
- Pfister, S.; Kriechbaum, K.; Roumeliotis, S.; Burdick, J. Weighted range sensor matching algorithms for mobile robot displacement estimation. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; IEEE: New York, NY, USA, 2002. [Google Scholar] [CrossRef]
- Barczyk, M.; Bonnabel, S. Towards realistic covariance estimation of ICP-based Kinect V1 scan matching: The 1D case. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; IEEE: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Brossard, M.; Bonnabel, S.; Barrau, A. A New Approach to 3D ICP Covariance Estimation. IEEE Robot. Autom. Lett. 2020, 5, 744–751. [Google Scholar] [CrossRef]
- Pomerleau, F.; Breitenmoser, A.; Liu, M.; Colas, F.; Siegwart, R. Noise characterization of depth sensors for surface inspections. In Proceedings of the 2012 2nd International Conference on Applied Robotics for the Power Industry (CARPI), Zurich, Switzerland, 11–13 September 2012; IEEE: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Y.; Liao, Q.; Ye, H.; Liu, M.; Wang, L. Characterization of a RS-LiDAR for 3D Perception. arXiv 2018, arXiv:1709.07641v1. [Google Scholar]
- Laconte, J.; Deschenes, S.P.; Labussiere, M.; Pomerleau, F. Lidar Measurement Bias Estimation via Return Waveform Modelling in a Context of 3D Mapping. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: New York, NY, USA, 2019. [Google Scholar] [CrossRef]
- Deschaud, J.E. IMLS-SLAM: Scan-to-Model Matching Based on 3D Data. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; IEEE: New York, NY, USA, 2018. [Google Scholar] [CrossRef]
- Landry, D.; Pomerleau, F.; Giguère, P. CELLO-3D: Estimating the Covariance of ICP in the Real World. arXiv 2019, arXiv:1810.01470v1. [Google Scholar]
- Iversen, T.M.; Buch, A.G.; Kraft, D. Prediction of ICP pose uncertainties using Monte Carlo simulation with synthetic depth images. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Pomerleau, F.; Colas, F.; Siegwart, R. A Review of Point Cloud Registration Algorithms for Mobile Robotics. Found. Trends Robot. 2015, 4, 1–104. [Google Scholar] [CrossRef]
- Naus, K.; Nowak, A. The Positioning Accuracy of BAUV Using Fusion of Data from USBL System and Movement Parameters Measurements. Sensors 2016, 16, 1279. [Google Scholar] [CrossRef]
- Marchel, Ł.; Naus, k.; Specht, M. Optimisation of the Position of Navigational Aids for the Purposes of SLAM technology for Accuracy of Vessel Positioning. J. Navig. 2019, 73, 282–295. [Google Scholar] [CrossRef]
- Du, S.; Xu, Y.; Wan, T.; Hu, H.; Zhang, S.; Xu, G.; Zhang, X. Robust iterative closest point algorithm based on global reference point for rotation invariant registration. PLoS ONE 2017, 12, e0188039. [Google Scholar] [CrossRef] [PubMed]
- Tazir, M.; Gokhool, T.; Checchin, P.; Malaterre, L.; Trassoudaine, L. CICP: Cluster Iterative Closest Point for Sparse-Dense Point Cloud Registration. Robot. Auton. Syst. 2018, 108, 66–86. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Circle | Square | |||||||
|---|---|---|---|---|---|---|---|---|
| ICP’s Version | ||||||||
| 0.0074 | 0.0073 | 0.0062 | 0.0101 | 0.0091 | 0.0102 | |||
| 0.0080 | 0.0077 | 0.0061 | 0.0095 | 0.0087 | 0.0093 | |||
| 0.0111 | 0.0107 | 0.0088 | 0.0160 | 0.0153 | 0.0150 | |||
| 0.1213 | 0.1126 | 0.1195 | 0.1195 | 0.0836 | 0.0889 | |||
| Proc. time | 0.0423 | 0.0651 | 0.0624 | 0.0589 | 0.0923 | 0.0876 | ||
| Circle | Square | |||||||
|---|---|---|---|---|---|---|---|---|
| ICP’s Version | ||||||||
| Proc. time | 0.0223 | 0.0210 | 0.0254 | 0.0217 | ||||
| No of iterations | 8 | 6 | 8 | 7 | 8 | 5 | 8 | 6 |
| Avg. time of iteration [s] | 0.0033 | 0.0028 | 0.0030 | 0.0042 | 0.0035 | 0.0036 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marchel, Ł.; Specht, C.; Specht, M. Testing the Accuracy of the Modified ICP Algorithm with Multimodal Weighting Factors. Energies 2020, 13, 5939. https://doi.org/10.3390/en13225939
Marchel Ł, Specht C, Specht M. Testing the Accuracy of the Modified ICP Algorithm with Multimodal Weighting Factors. Energies. 2020; 13(22):5939. https://doi.org/10.3390/en13225939
Chicago/Turabian StyleMarchel, Łukasz, Cezary Specht, and Mariusz Specht. 2020. "Testing the Accuracy of the Modified ICP Algorithm with Multimodal Weighting Factors" Energies 13, no. 22: 5939. https://doi.org/10.3390/en13225939
APA StyleMarchel, Ł., Specht, C., & Specht, M. (2020). Testing the Accuracy of the Modified ICP Algorithm with Multimodal Weighting Factors. Energies, 13(22), 5939. https://doi.org/10.3390/en13225939