Parameters Identification of Equivalent Model of Permanent Magnet Synchronous Generator (PMSG) Wind Farm Based on Analysis of Trajectory Sensitivity


Abstract
1. Introduction
2. Initialization Method for the Equivalent Model of PMSG Wind Turbine
3. Control System and Time-Varying Parameters Trajectory Sensitivity
3.1. The Necessity of Trajectory Sensitivity Analysis
3.2. Algorithm of Trajectory Sensitivity Analysis
- (1)
- Firstly, a simulation example is built to set the candidate identification parameters to the nameplate or technical manuals values. If they cannot be found on the nameplate and technical manual, they are set as the typical values.
- (2)
- Then, the power flow is computed. After that, the transient analysis and computation are conducted. As a result, and are recorded.
- (3)
- Increase the value of candidate identification parameter by 5% based on the value set in Step (1). Repeat step (2) to get and .
- (4)
- The trajectory sensitivity of the candidate identification parameter are computed as
- (5)
- The average trajectory sensitivities of the candidate identification parameter for active as well as reactive power are computed aswhere is the number of sample data.
- (6)
- Repeat Steps (2)–(5) to compute the trajectory sensitivity and average trajectory sensitivity of all candidate identification parameters.
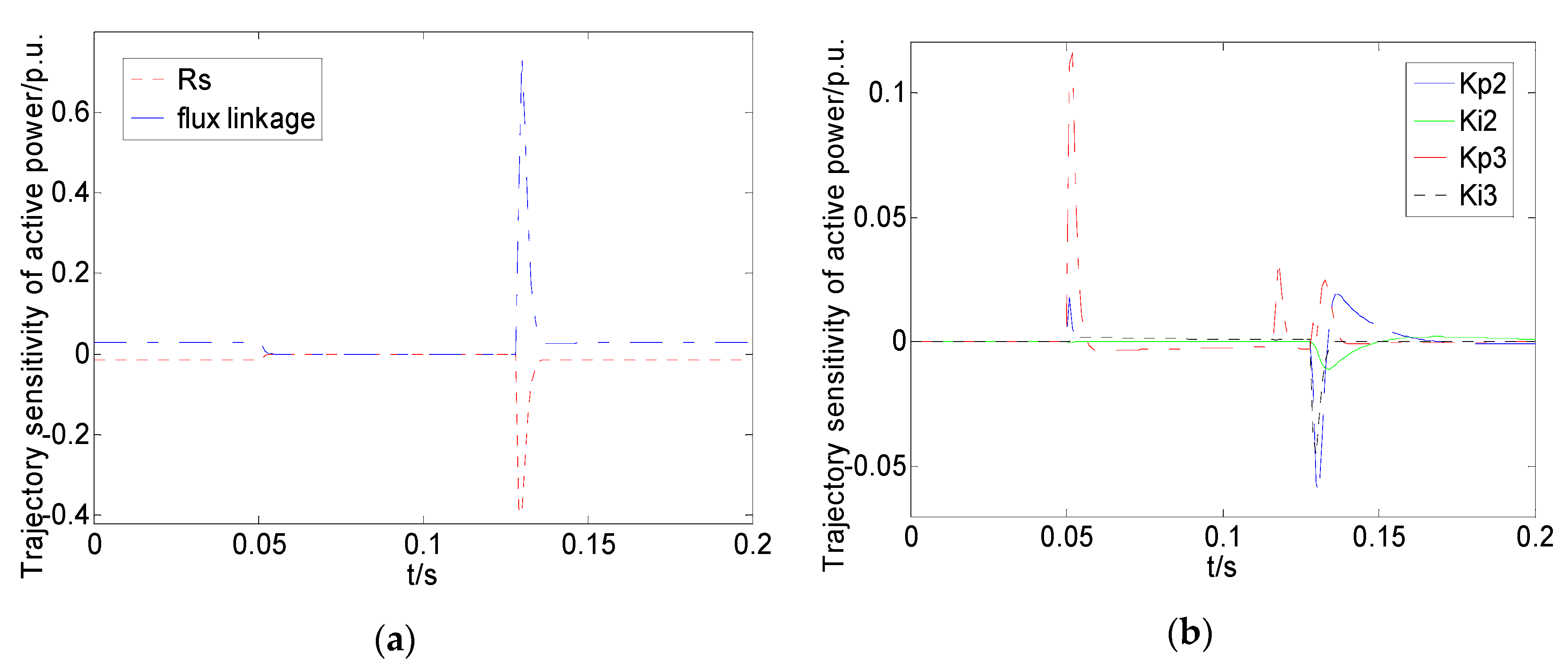
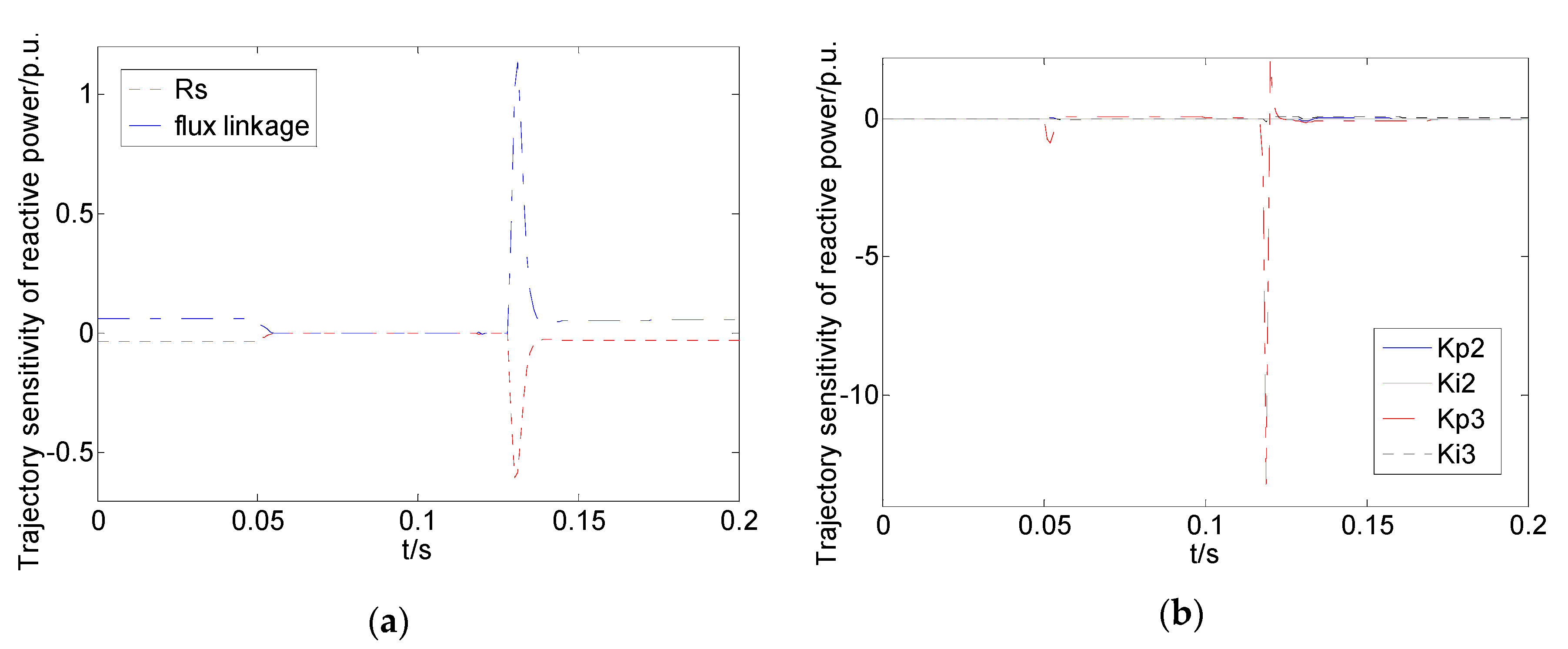
3.3. A Case of Trajectory Sensitivity Analysis
4. Parameters Identification for Equivalent Model of PMSG Wind Farm
4.1. Model of Parameters Estimation
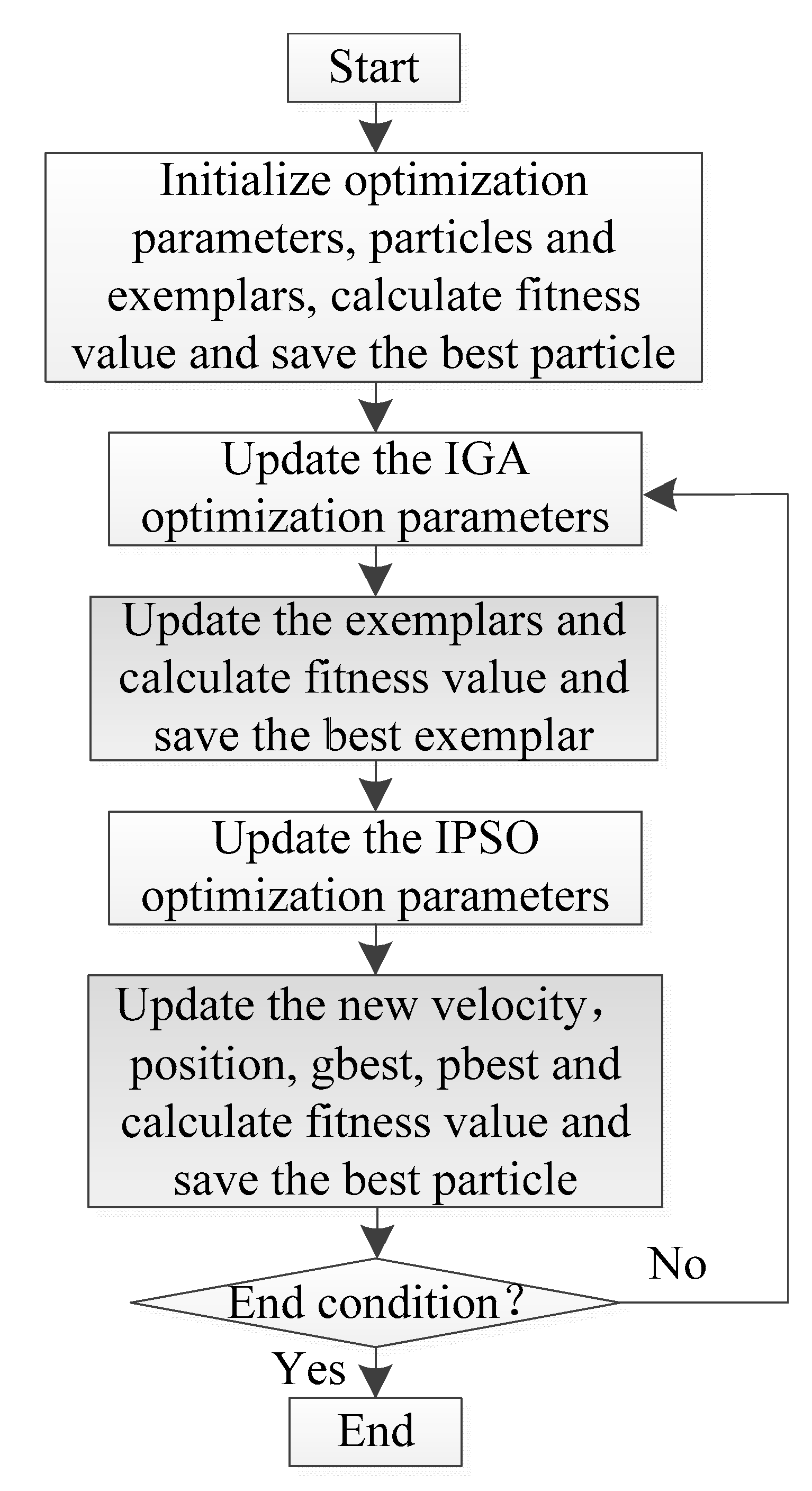
4.2. Parameters Identification Algorithm
5. Text Case
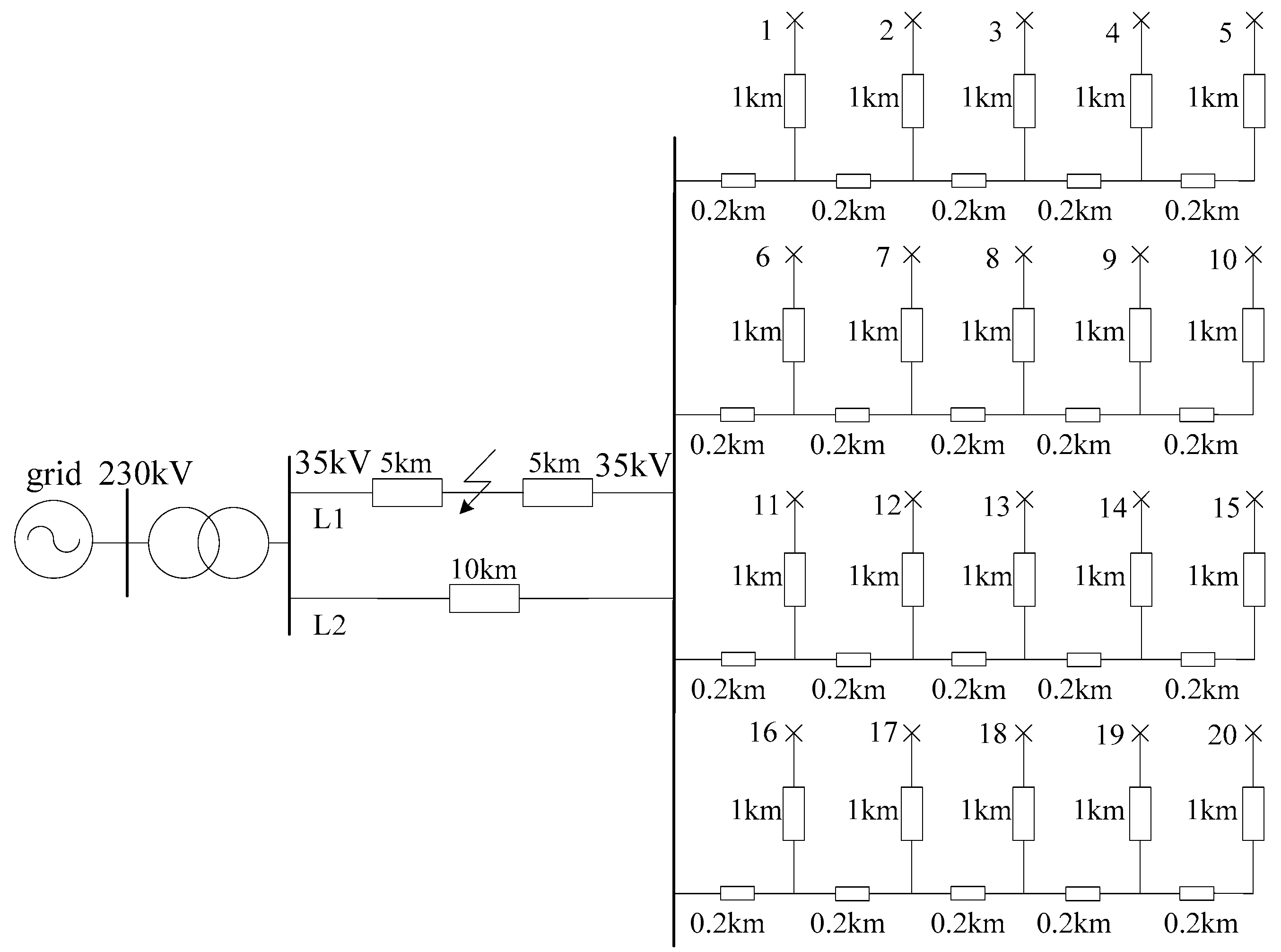
5.1. Configurations of Case
5.2. Text Results
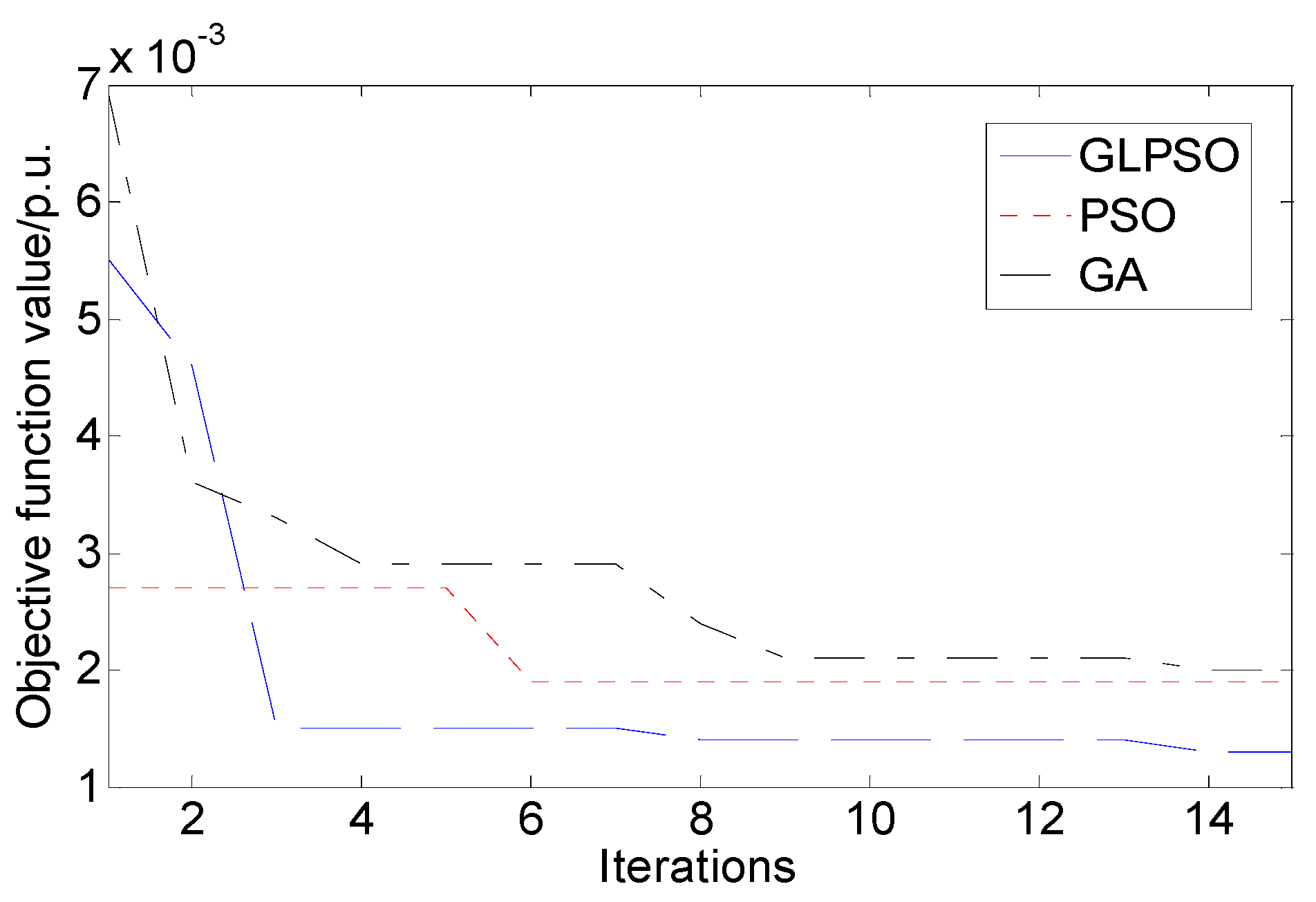
5.2.1. Convergence Rate and Searching Capability of Improved GLPSO
5.2.2. Dispersion of Identified Parameters
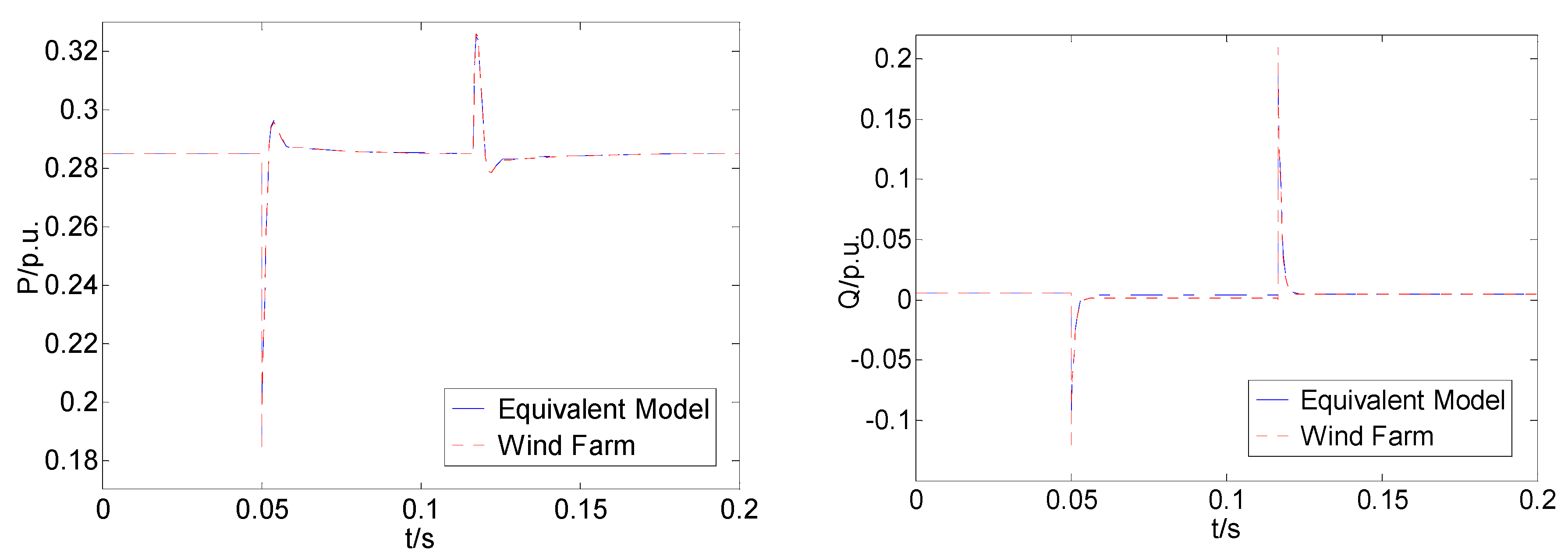
5.2.3. Verification of Descriptive Capability
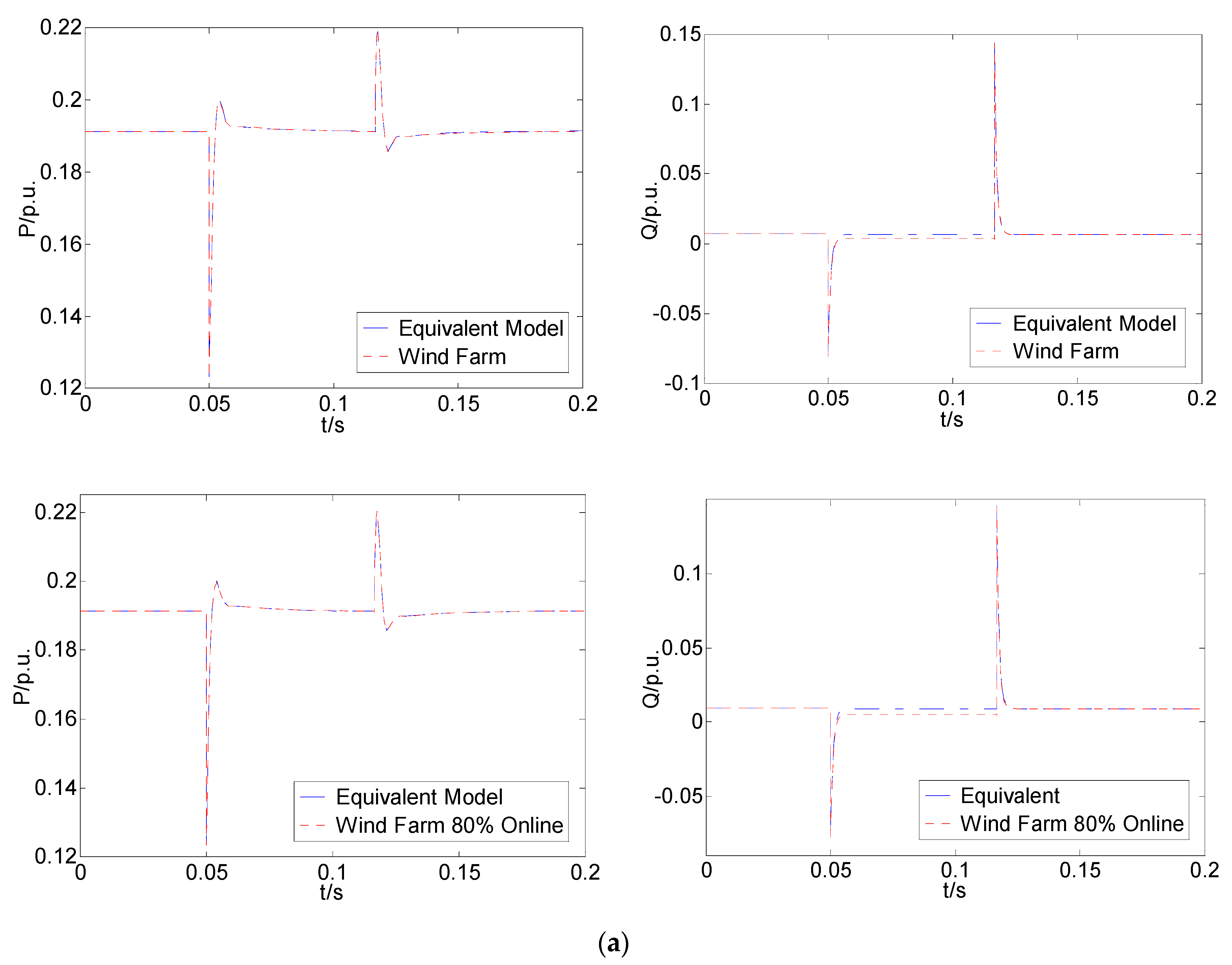
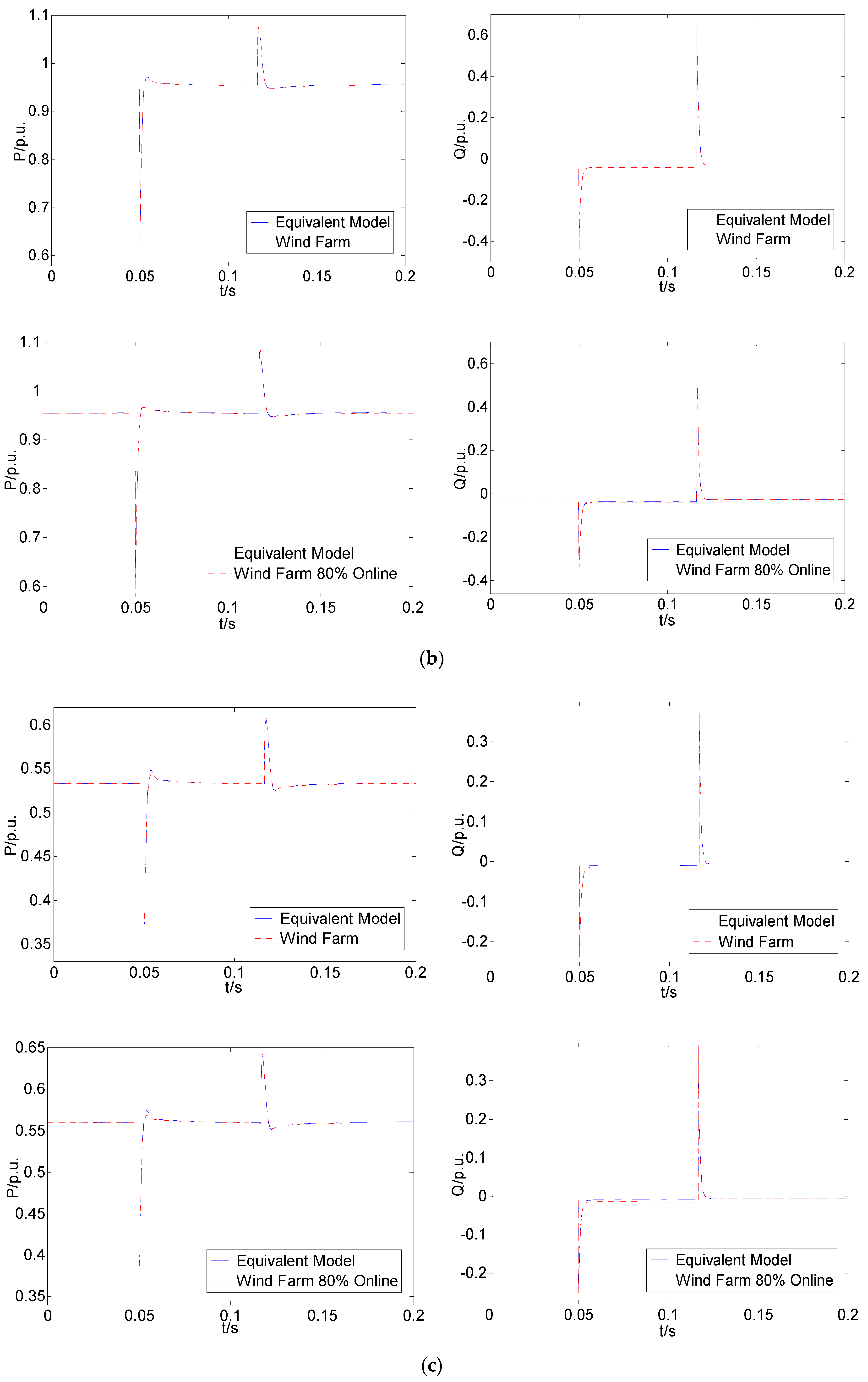
5.2.4. Verification of Generalization Capability
5.2.5. Unknown Wind Speed Scene
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Mohammadpour, H.A.; Santi, E. SSR damping controller design and optimal placement in rotor-side and grid-side converters of series-compensated DFIG-based wind farm. IEEE Trans. Sustain. Energy 2015, 6, 388–399. [Google Scholar] [CrossRef]
- Ullah, N.R.; Thiringe, T.; Karlsson, D. Voltage and transient stability support by wind farms complying with the E.ON Netz grid code. IEEE Trans. Power Syst. 2007, 22, 1647–1656. [Google Scholar] [CrossRef]
- Kunjumuhammed, L.P.; Pal, B.C.; Gupta, R.; Dyke, K.J. Stability Analysis of a PMSG-Based Large Offshore Wind Farm Connected to a VSC-HVDC. IEEE Trans. Energy Convers. 2017, 32, 1166–1176. [Google Scholar] [CrossRef]
- Song, R.; Guo, J.; Li, B.; Zhou, P.; Du, N.; Yang, D. Mechanism and characteristics of subsynchronous oscillation in direct-drive wind power generation system based on input-admittance analysis. Proc. CSEE 2017, 37, 4662–4670. [Google Scholar] [CrossRef]
- Zhou, P.P.; Li, G.F.; Song, R.H.; Yang, D.Y. Subsynchronous oscillation characteristics and interactions of direct drive permanent magnet synchronous generator and static var generator. Proc. CSEE 2018, 38, 4369–4378. [Google Scholar] [CrossRef]
- Xie, X.R.; Liu, H.K.; He, J.B.; Zhang, C.Y.; Qiao, Y. Mechanism and characteristics of subsynchronous oscillation caused by the interaction between full-converter wind turbines and AC systems. Proc. CSEE 2016, 36, 2366–2372. [Google Scholar] [CrossRef]
- Ruan, J.-Y.; Lu, Z.-X.; Qiao, Y.; Min, Y. Analysis on Applicability Problems of the Aggregation-Based Representation of Wind Farms Considering DFIGs’ LVRT Behaviors. IEEE Trans. Power Syst. 2016, 31, 4953–4965. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, Z.; Huang, Q.; Wang, N.; Zhang, X.; Lee, W.-J. Improved Wind Farm Aggregated Modeling Method for Large-Scale Power System Stability Studies. IEEE Trans. Power Syst. 2018, 33, 6332–6342. [Google Scholar] [CrossRef]
- Jalili-Marandi, V.; Pak, L.-F.; Dinavahi, V. Real-Time Simulation of Grid-Connected Wind Farms Using Physical Aggregation. IEEE Trans. Ind. Electron. 2009, 57, 3010–3021. [Google Scholar] [CrossRef]
- Fernández, L.M.; Jurado, F.; Sáenz, J.R.; Fernández-Ramírez, L.M. Aggregated dynamic model for wind farms with doubly fed induction generator wind turbines. Renew. Energy 2008, 33, 129–140. [Google Scholar] [CrossRef]
- Li, W.; Chao, P.; Liang, X.; Ma, J.; Xu, D.G.; Jin, X. A Practical Equivalent Method for DFIG Wind Farms. IEEE Trans. Sustain. Energy 2018, 9, 610–620. [Google Scholar] [CrossRef]
- Ali, M.; Ilie, I.-S.; Milanovic, J.V.; Chicco, G. Wind Farm Model Aggregation Using Probabilistic Clustering. IEEE Trans. Power Syst. 2013, 28, 309–316. [Google Scholar] [CrossRef]
- Zou, J.; Peng, C.; Xu, H.; Yan, Y. A Fuzzy Clustering Algorithm-Based Dynamic Equivalent Modeling Method for Wind Farm With DFIG. IEEE Trans. Energy Convers. 2015, 30, 1329–1337. [Google Scholar] [CrossRef]
- Zhang, Y.; Muljadi, E.; Kosterev, D.; Singh, M. Wind Power Plant Model Validation Using Synchrophasor Measurements at the Point of Interconnection. IEEE Trans. Sustain. Energy 2014, 6, 984–992. [Google Scholar] [CrossRef]
- Brochu, J.; LaRose, C.; Gagnon, R. Validation of Single- and Multiple-Machine Equivalents for Modeling Wind Power Plants. IEEE Trans. Energy Convers. 2010, 26, 532–541. [Google Scholar] [CrossRef]
- Lin, J.; Cheng, L. Model Parameters Identification Method for Wind Farms Based on Wide-Area Trajectory Sensitivities. Int. J. Emerg. Electr. Power Syst. 2010, 11, 1–19. [Google Scholar] [CrossRef]
- Cheng, X.; Lee, W.-J.; Sahni, M.; Cheng, Y.; Lee, L.K. Dynamic Equivalent Model Development to Improve the Operation Efficiency of Wind Farm. IEEE Trans. Ind. Appl. 2016, 52, 2759–2767. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, C.; Zhu, L.; Zhang, G.; Li, X.; Chen, Y. Comprehensive modeling and parameter identification of wind farms based on wide-area measurement systems. J. Mod. Power Syst. Clean Energy 2016, 4, 383–393. [Google Scholar] [CrossRef]
- Kunjumuhammed, L.P.; Pal, B.C.; Oates, C.; Dyke, K.J. The Adequacy of the Present Practice in Dynamic Aggregated Modeling of Wind Farm Systems. IEEE Trans. Sustain. Energy 2016, 8, 23–32. [Google Scholar] [CrossRef]
- Kim, D.-E.; El-Sharkawi, M.A. Dynamic Equivalent Model of Wind Power Plant Using Parameter Identification. IEEE Trans. Energy Convers. 2015, 31, 37–45. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, L.; Lee, W.-J. Robustness Analysis of Dynamic Equivalent Model of DFIG Wind Farm for Stability Study. IEEE Trans. Ind. Appl. 2018, 54, 5682–5690. [Google Scholar] [CrossRef]
- Zhang, J.; Cui, M.; He, Y. Robustness and adaptability analysis for equivalent model of doubly fed induction generator wind farm using measured data. Appl. Energy 2020, 261, 1–12. [Google Scholar] [CrossRef]
- Pan, X.; Feng, X.; Ju, P. Generalized load modeling of distribution network integrated with direct-drive permanent-magnet wind farms. Autom. Power Syst. 2017, 41, 62–68. [Google Scholar] [CrossRef]
- Zhou, P.P.; Li, G.F.; Sun, H.D.; Song, R.H.; Du, N. Equivalent Modeling Method of PMSG Wind Farm Based on Frequency Domain Impedance Analysis. Proc. CSEE 2020, in press. [Google Scholar]
- Xia, A.J.; Qiao, Y.; Lu, Z.X.; Ruan, J.Y. Effects of aggregated PMSG wind farm model error on transient stability analysis of power systems. Power Syst. Technol. 2016, 40, 341–347. [Google Scholar] [CrossRef]
- Permanent Magnet Synchronous Generator (PMSG) Based Wind Power Generation System. Available online: https://www.mathworks.com/matlabcentral/fileexchange/36116-pmsg-based-wind-power-generation-system (accessed on 10 April 2012).
- Gong, Y.J.; Li, J.-J.; Zhou, Y.; Li, Y.; Chung, H.S.-H.; Shi, Y.-H.; Zhang, J. Genetic Learning Particle Swarm Optimization. IEEE Trans. Cybern. 2015, 46, 2277–2290. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Stator resistance (p.u.) | 0.0272 | Rated capacity of T2 (MVA) | 2 |
| Stator resistance (p.u.) | 0.5131 | T2 resistance (p.u.) | 0.0015 |
| Flux linkage (p.u.) | 1.1884 | Leakage reactance of T2 (p.u.) | 0.0415 |
| Inertial constant (s) | 1.4393 | Rated power factor of PMSG wind turbine | 1.0 |
| Rated capacity of MSC (p.u.) | 1.0 | Rated capacity of GSC (p.u.) | 1.2 |
| DC Bus Voltage (V) | 1150 | Filter resistance (p.u.) | 0.03 |
| DC capacitor (F) | 0.01 | Filter resistance (p.u.) | 0.3 |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| MSC current controller | 0.1361 | GSC lower limit of reference current (p.u.) | −1.2 |
| MSC current controller | 2.7221 | Upper limit reference torque (p.u.) | 1.1 |
| DC voltage controller | 8 | Lower limit reference torque (p.u.) | −1.1 |
| DC current controller | 400 | Pitch angle controller | 200 |
| GSC current controller | 0.83 | Maximum pitch angle (°) | 27 |
| GSC current controller | 5 | Maximum pitch angle change rate (°/s) | 10 |
| GSC upper limit of current (p.u.) | 1.2 | Minimal pitch angle change rate (°/s) | −10 |
| Parameters | Active Power | Reactive Power | Parameters | Active Power | Reactive Power |
|---|---|---|---|---|---|
| 0.0157 | 0.0302 | 0.0000 | 0.0000 | ||
| 0.0000 | 0.0000 | 0.0024 | 0.0045 | ||
| 0.0000 | 0.0000 | 0.0009 | 0.0018 | ||
| 0.0286 | 0.0560 | 0.0035 | 0.1444 | ||
| 0.0000 | 0.0000 | 0.0012 | 0.0239 |
| Parameters | Active Power | Reactive Power | Parameters | Active Power | Reactive Power |
|---|---|---|---|---|---|
| 0.0047 | 0.0177 | 0.0000 | 0.0000 | ||
| 0.0000 | 0.0000 | 3.15 × 10−5 | 0.00036 | ||
| 0.0000 | 0.0000 | 2.47 × 10−5 | 2.76 × 10−5 | ||
| 0.0071 | 0.0150 | 0.0024 | 0.0650 | ||
| 0.0000 | 0.0000 | 0.00053 | 0.0092 |
| [0.594–2.377] | [1.600–40.000] | [80.000–2000.000] | [0.166–4.150] | [1.000–25.000] |
| Wind Speed | |||||
|---|---|---|---|---|---|
| 7 m/s | 1.5773 | 8.4326 | 358.5877 | 0.7698 | 3.7783 |
| 8 m/s | 1.5580 | 8.1466 | 382.4388 | 0.7955 | 3.8919 |
| 9 m/s | 1.7754 | 8.1307 | 417.8176 | 0.8106 | 4.8668 |
| 10 m/s | 1.3471 | 7.9733 | 400.4220 | 0.8156 | 4.7120 |
| 11 m/s | 1.4920 | 8.2924 | 364.5235 | 0.8159 | 5.6793 |
| 12 m/s | 1.3722 | 7.9720 | 397.1256 | 0.8235 | 5.4453 |
| Wake Effect | 1.4550 | 7.7923 | 313.3526 | 0.7967 | 3.9189 |
| Wind Speed | |||||
|---|---|---|---|---|---|
| 7 m/s | 1.5561 | 8.6378 | 257.2373 | 0.7594 | 4.3353 |
| 8 m/s | 1.5625 | 8.3687 | 355.7341 | 0.7863 | 3.5676 |
| 9 m/s | 1.7915 | 8.3210 | 395.7704 | 0.7889 | 3.8645 |
| 10 m/s | 1.7601 | 8.2780 | 352.3386 | 0.8017 | 4.5689 |
| 11 m/s | 1.5934 | 8.2248 | 432.2732 | 0.8155 | 5.5417 |
| 12 m/s | 1.5880 | 8.1397 | 400.2451 | 0.8293 | 4.9157 |
| Wake Effect | 1.4849 | 7.7995 | 295.8272 | 0.8259 | 3.5769 |
| 100% Online | Active Power | Reactive Power | 80% Online | Active Power | Reactive Power |
|---|---|---|---|---|---|
| 7 m/s | 99.99% | 99.75% | 7 m/s | 99.99% | 99.59% |
| 12 m/s | 99.99% | 99.98% | 12 m/s | 99.99% | 99.98% |
| Wake Effect | 99.94% | 99.95% | Wake effect | 99.93% | 99.94% |
| Parameters | |||||
|---|---|---|---|---|---|
| Wake Effect | 1.5523 | 7.8411 | 279.2768 | 0.8237 | 3.9126 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Cui, M.; He, Y. Parameters Identification of Equivalent Model of Permanent Magnet Synchronous Generator (PMSG) Wind Farm Based on Analysis of Trajectory Sensitivity. Energies 2020, 13, 4607. https://doi.org/10.3390/en13184607
Zhang J, Cui M, He Y. Parameters Identification of Equivalent Model of Permanent Magnet Synchronous Generator (PMSG) Wind Farm Based on Analysis of Trajectory Sensitivity. Energies. 2020; 13(18):4607. https://doi.org/10.3390/en13184607
Chicago/Turabian StyleZhang, Jian, Mingjian Cui, and Yigang He. 2020. "Parameters Identification of Equivalent Model of Permanent Magnet Synchronous Generator (PMSG) Wind Farm Based on Analysis of Trajectory Sensitivity" Energies 13, no. 18: 4607. https://doi.org/10.3390/en13184607
APA StyleZhang, J., Cui, M., & He, Y. (2020). Parameters Identification of Equivalent Model of Permanent Magnet Synchronous Generator (PMSG) Wind Farm Based on Analysis of Trajectory Sensitivity. Energies, 13(18), 4607. https://doi.org/10.3390/en13184607